4 minute read
RETA 10


` Apresentar as formas vetorial, paramétrica e simétrica das retas.
` Discutir a posição relativa entre duas retas: intersecção, perpendicularismo e ângulos entre elas.
10.1 INTRODUÇÃO
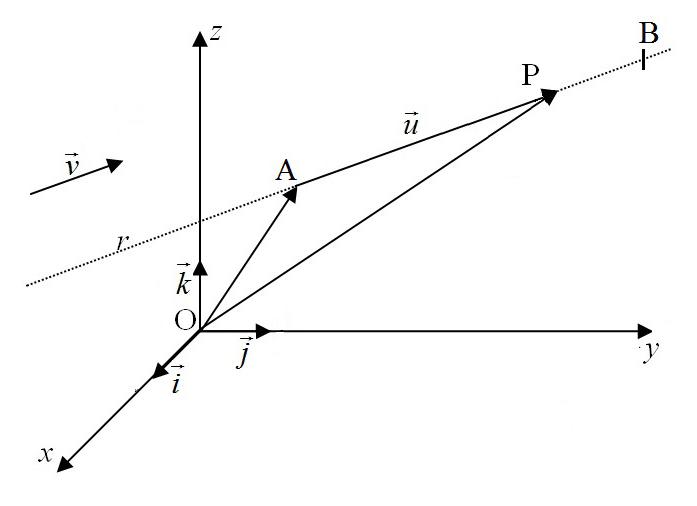
Consideremos em 3V o sistema de referência (O, i , j , k ), sendo E = ( i , j , k ) a base ortonormal positiva e O(0,0,0) a origem.
Apresentaremos três tipos de equações de retas: vetorial, paramétrica e simétrica.
10.2 EQUAÇÃO VETORIAL DA RETA
Podemos associar cada ponto P(x, y, z) do espaço a um vetor cujo representante tem origem em O e extremidade no ponto P, indicado por OP
= x i + y j + z k ou, também, por OP(,,) xyz =
.
Sabemos que por dois pontos A e B distintos, existe uma só reta r que “passa” por eles. Os pontos A e B definem a direção da reta.
Uma equação da reta é obtida quando se conhecem as coordenadas de dois pontos fixos distintos ou, então, as coordenadas de um ponto fixo e a sua direção. A direção de uma reta é dada pela direção de um vetor 0 v ≠ paralelo a ela.
Seja A o ponto fixo de uma reta r e P um ponto qualquer de r. O vetor OP é a soma dos vetores OA
O sentido e o comprimento de u variam conforme a localização de P em r.
Se v tem a direção de r, então v // u Assim, existe λ real tal que u = λ v , que, substituído na sentença acima, resulta em: denominada equação vetorial da reta r
Vemos, pela equação vetorial, que a cada valor do parâmetro λ corresponde um só ponto P de r.
Sendo OP
= (x, y, z), OA
=
Observação 10.1 então equação vetorial de r é descrita por
Se forem dados dois pontos distintos da reta r : A AAA (,,) xyz e B BBB (,,) xyz , podemos tomar o vetor v como que a equação da reta não depende do módulo ou sentido de v
==−−− percorre os valores em ℝ.
Exemplo 10.1:
Obtenha a equação vetorial da reta r, conhecendo-se os seus pontos A(2,1,0) e B(5,0,1).
Solução:
Temos que v = AB = (3,–1,1). Utilizando o ponto fixo A, segue de (1) que r: (x, y, z) = (2,1,0) + λ (3,–1,1), λ∈ � ℝ.
10.3 EQUAÇÕES PARAMÉTRICAS DA RETA
Partindo da equação vetorial (1), temos que: r: (x, y, z) = (xA + λa, yA + λb, zA + λc),
Estabelecendo a igualdade das respectivas coordenadas, teremos as equações: denominadas de equações paramétricas de r.
Exemplo 10.2:
Partindo da solução do Exemplo 10.1 , dê as equações paramétricas da reta r
10.4 EQUAÇÃO SIMÉTRICA DA RETA
entre as componentes de u
` Apresentar as equações vetorial, paramétrica e geral dos planos.
` Discutir a posição relativa entre retas e planos e suas possíveis intersecções.
` Obter a projeção ortogonal de uma reta em um plano.
11.1 INTRODUÇÃO
Consideremos em 3V o sistema de referência (O, i , j , k ), sendo E = ( i , j , k ) a base ortonormal positiva e O(0,0,0) a origem.
Apresentaremos as equações do plano: equação vetorial, equações paramétricas, equação geral e linear do plano.
11.2 EQUAÇÃO VETORIAL DO PLANO
Sabe-se que existe um só plano que contém um conjunto de três pontos distintos A, B e C, não pertencentes a uma mesma reta. Entendemos que os três pontos determinam a posição do plano no espaço euclidiano.
Um plano β é identificado, de modo único, se forem conhecidos A, um de seus pontos, e dois vetores u e não nulos e não paralelos entre si, mas paralelos ao plano β Veja representantes u e v do plano β na Figura 11.1.
Os vetores u e v indicam uma família de planos paralelos a eles, e o ponto A define qual deles é o plano β . O comprimento e o sentido desses vetores são irrelevantes.
Os pontos A, B e C, distintos e não colineares, também definem o plano que os contém, de modo análogo ao de um ponto e dois vetores não nulos e não paralelos, pois se podem considerar o ponto A e os vetores u = AB e v = AC
Temos, na Figura 11.1, os pontos A AAA (,,) xyz , B BBB (,,) xyz e C CCC (,,) xyz , não colineares e P(x,y,z) um ponto qualquer do plano β
Os vetores u = AB = BBBAAA (,,) xxyyzz = 123 (,,) uuu e v = AC = CACACA (,,) xxyyzz = 123 (,,) vvv dão a orientação de β
Vemos que: OP = OA + AP
Sabemos que a cada posição de P existem λ e γ reais tais que AP
Portanto, tem-se:
Essa equação denomina-se equação vetorial do plano β
Vemos, pela equação vetorial, que a cada par de valores dos parâmetros λ e γ corresponde um só ponto P de β .
.
Sendo OP
= (x,y,z), OA
= AAA (,,) xyz , u = 123 (,,) uuu e v = 123 (,,) vvv , então a equação vetorial é dada por: β : (x,y,z) = AAA (,,) xyz + λ 123 (,,) uuu + γ 123 (,,) vvv , , . (2)
Exemplo 11.1:
1. Obtenha a equação vetorial do plano β , sabendo-se que A(2,1,0) pertence a β e que β tem a orientação dos vetores u = (2,1,3) e v = (4,3,1) .

Solução:
Os vetores u e v são não nulos (os seus módulos são diferentes de zero) e não paralelos (as correspondentes coordenadas não são proporcionais). Utilizando o ponto A fixo de β , segue de (2), que: β : (x,y,z) = (2,1,0) + λ(2,1,3) + γ (4,3,1), ,
2. Obtenha a equação vetorial do plano β , conhecendo-se os seus pontos A(2,1,0) e B(5,0,1) e C(3,2,5).
Solução:
Tomemos u = AB = (3,–1,1) e v = AC = (1,1,5) que não são nulos ou paralelos. Utilizando o ponto fixo A, segue de (2) que: β : (x, y, z) = (2, 1, 0) + λ (3, –1, 1) + γ (1, 1, 5), , .
11.3 EQUAÇÕES PARAMÉTRICAS DO PLANO
Partindo da equação vetorial do plano β : (x,y,z) = AAA (,,) xyz + λ 123 (,,) uuu + γ 123 (,,) vvv , , , temos que: β : (x,y,z) = A11A22A33 (,,) uvuvuvxyzλγλγλγ ++++++ , , .
Estabelecendo a igualdade das respectivas coordenadas, obtêm-se as equações:
Essas equações denominam-se equações paramétricas de β .
Exemplo 11.2: x y z
23 :1 ,, 05 x y z
= 123 (,,) uuu
= AAA (,,) xxyyzz .
≠
não






