International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056

Volume: 09 Issue: 12 | Dec 2022 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 12 | Dec 2022 www.irjet.net p-ISSN: 2395-0072
1Sanket Sujay Shinde, MCA, YTC Satara
2Gurudas Ramdas Mali, MCA, YTC Satara
2
3 Asst.prof.V.V.Kadam, Asst.prof.S.S.Jadhav, Dept. of MCA, Yashoda Technical Campus Satara, Maharashtra, India ***
Abstract - Mobility impairment is a major problem affecting the independence of people with physical disabilities.Therefore,mobilityaidsneedtobeimprovedin order to improve people's living standards. This paper describesthedesignofsmartwheelchairsusingembedded systems.Thispaperdescribesthedesignanddevelopmentof smartwheelchairsusingembeddedsystems.Theproposed design of the wheelchair can be controlled via Bluetooth, thus allowing the user to control the wheelchair with less effort. In addition to the virtual joystick control interface, touchcommandsareprovidedtothesystemtoenhanceuser interaction.Ithelpspeoplewithdisabilitiestocarryouttheir daily indoor activities independently. Experiments will be conducted to verify the functions of the developed smart wheelchair.
Thispaperfocusesontheproblemofdisabledpeoplewho wanttocommutebythemselvesbutcannotdrivefornatural reasons.ThisproposedprojectfocusesonBluetoothcontrol ofawheelchairwithautomaticmovementindirectionssuch asforward,backward,left,right,anddiagonalbyBluetooth commands. This model uses an Android app to pass Bluetooth commands to the Raspberry PI 3 via Bluetooth communication with the Bluetooth module. People who become disabled face many problems when moving from oneplacetoanother.Mostdisabledpeopleuseconventional wheelchairs. Previously, wheelchairs were manually operated. Operated by hand or by anotherperson ifthe patient is unable to drive. For this type of wheelchair, the personmusthavesufficientstrengthtocontrolit.Otherwise, anotherpersonmustbepresenttomonitorthemovementof the chair. Some face big problems. In this case, a second personisalwaysrequired[1].Sopeopleworkingsmallparts ofthebodycanuseitwithminimumeffortandmaximum precisionandspeedcontrol.Thedeviceisloadedwithmany extra features that make it smart. This wheelchair is therefore designed to overcome the above problems and allow the end-user to perform only safe movements and performdailynecessities.
Thispaperdescribesasimple,intelligent,affordable,motorcontrolled key device that is easy to use, provides customizedcommandstothe,andallowsthe wheelchairto moveindependently.I'mhere.Asmartphoneisusedasthe robot'sbrain togiveinstructions.Bluetoothsimplifieshis
communication from wired to wireless. The IR sensor is alsousedtodetectandnotifyyouwhenyoufindanobstacle inyourpassageway. Thisdesignrequirestheusertocontrol the movement of her wheelchair using Bluetooth commands.These commandsarereceivedbytheAndroid applicationonthe user'sphone,whichisconnectedtothe wheelchair via the Bluetooth module. Commands issued relate to the and RS channels and are received by the module.ThepurposeoftheBluetoothcontrolledwheelchair is tolistentothe andrespondtocommandsreceivedfrom the user. This application is just an artificial intelligence application.Here,thesystemrequirestrainingofthe user, after which the device will start capturing his commands issued.Thisisdonebyattachingcomment tothecontroller viacode.
The Smart Wheelchair consists of awheelchaircontrolledBluetoothmodule.Toset up a system for cheap monitoring,theRaspberryPI3UNOallowsyoutoapproach thesystemwithoutviewingtheunit.Wheelchairmovement can becontrolledmanuallyviaBluetooth.Commands areimplementedusingaBluetoothmobile app and sent totheRaspberry PI 3 UNO where thecommands are processed.[3,4]Afterprocessing,thecommandsaresentin theformofdigitalsignalstothemotordriverICtocontrolit. wheelchair movement. Thissystem was alsodeveloped to control wheelchairs with Android devices. The user can steerthewheelchairbyselectingspecificdirectionsdisplayed inthe four quadrantsofthe Androidsmartphone screen.Raspberry PI 3 UNOwill tryto executeevery command.Motordriversand Bluetoothmodules work withthis system.This is how youhavea car chairthatyoucandrivewith yourAndroiddevice.This project uses a Bluetoothmodule, namelyHC-05. Whena buttonispressedintheBluetoothapp,theBluetoothmodule recognizes the correspondingbuttonpressed in Bluetooth. Your Android smartphone app runsona smartphone and uses drawing commands recognized by the smartphone's Bluetooth. The command is processed and each transliterationkeypressedisexecutedinsidetheBluetooth moduleandsentthroughtheBluetoothapptothereceiver which is a Raspberry PI3.This project iscontrolled by aRaspberryPI3.TheRaspberryPI3usedistheRaspberryPI 3 UNO.TheRaspberry PI 3 UNO is a root development boardfor the ATmega328 microcontroller with 6analog
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 12 | Dec 2022 www.irjet.net p-ISSN: 2395-0072
input means and 14 digital I/O pins. It has32 KB offlashmemory (ISP),2KB of RAM,and 1KB ofEPROM. Thisboardoffersthepossibilityofserialcommunicationvia UART,SPI.Itcanoperateataclockfrequencyof16MHz.In this project, 2, 3, 4, and 65 aredigital input/output pins configured as output pins bythe Raspberry PI3.Serial communication uses0'sand1's onthe HC 05 module.TextreceivedviaBluetoothissenttotheRaspberry PI 3 Uno board usingtheUART serial communication protocol.TheRaspberry PI 3 UNO program controller checksifthereceivedlettersmatchthe orderoftheletters anddoesnotcontrolthemovementofthewheelchairatthe start.
Table 1.Bluetooth-ControlledWheelchairDirections
Character Direction Function
N North MovesForward
E East MovesRight
W West MovesLeft
S South MovesBackward
0 Stop MotorStops
1 North-West MovesForwardLeft
3 North-East MovesForwardRight
7 South-west MovesBackwardLeft
9 South-East MovesBackwardLeft
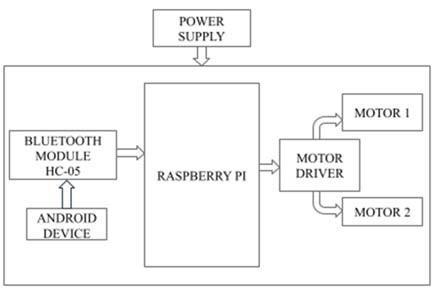
through android device, then this is transferred to the Raspberry Pi using bluetooth module which is the transmission unit to the receiving unit. According to the desiredcharacteroptedbytheuser,theRaspberryPigives thesignaltotheMotordriverasperthealgorithmusedin thesoftwareprogram.Motordrivergetssignalusingserial communicationandmovesthewheelchaireitherforward, backwardorstop.TheAndroidapplicationisconnectedto the Bluetooth module HC-05 and is installed on the wheelchair by Bluetooth. The commands are sent to the wheelchair using Bluetooth commands present on the Androidapplication. ThetransmitteroftheBluetoothcan takeBluetoothcommandswhichareconvertedtoencoded digital data fortheadvantageoftheadequate100meters rangefromthewheelchair.Thereceiverpartwilldecodethe dataviamotordriverICforthenecessarycommands.
TheRaspberryPI3programchecksthecodereceivedbythe Bluetooth module and if it is a matching character with a given program, then with each respective character the RaspberryPI3sendsasignaltothemotordriver.Depending onthereceivedcharactertheMotor.ThisBluetooth-module issimpletointerfacethewireless connectiondevices.Now themaincrucialcomponentofthewheelchairistheL293D MotorDriver.ItisadualHBridgehighcurrentmotordriver IC.ThisisusedbecausedigitalpinsofRaspberryPI3can’t sourceenoughcurrenttorunthemotorofawheelchair.[5] H-bridgesareusefulincontrollingthedirectionofrotation of the motor enable pins of the IC being actively high are connectedtothe5 volts.4outputpinsofl293dICareconnectedtoMotors AandBatthereceiverend.
Used Software and application: Proteus 8 Professional SimulationSoftware,BluetoothJoystickApp
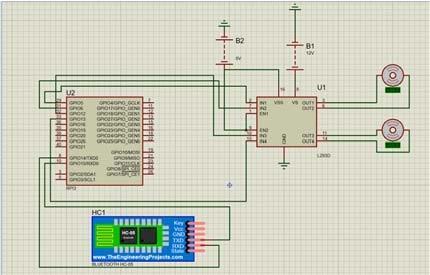
Fig. 3. Motorsmovesinforwarddirectionasthejoystickis inforwarddirection
Thepowersupplyofthisentiresystemisgiventhrougha battery. This system's hardware consists of an embedded system based on the Raspberry Pi 3b, Bluetooth module (HC-05), Motor driver (L298N), Android device and dc motors. Bluetooth Module is the communication medium betweentheuserinterfacethroughtheandroiddeviceand thesystembymeansofcharactercommandsgiven tothe androiddevice.
All the software application program is installed in the RaspberryPiandandroiddevice.Whentheuseroptsforthe desired character command through the bluetooth app
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 12 | Dec 2022 www.irjet.net p-ISSN: 2395-0072
Inputs Rotation of motors with inputs accordingtousercommands
Input1=HIGH Motor1rotatesinclockwisedirection
Input2=LOW
Input3=HIGH Motor2rotatesinclockwisedirection Input4=LOW
Input1=LOW Motor 1 rotates in anti-clockwise direction Input2=HIGH
Input3=LOW Motor 2 rotates in amti-clockwise direction Input4=HIGH
Input1=HIGH Motor1staysstill Input2=HIGH
Input3=HIGH Motor2staysstill Input4=HIGH
Thewheelchairmovesforwardwhenitisinstructedtodoso bythemovementofboththewheelsinclockwisedirection. Itmovesbackwardwhenboththewheelsaregiveninputto moveinananti-clockwise direction.Itturnsrightwhenthe left wheel only turns clockwise and moves left when the rightwheelturnsclockwise.Itmovesdiagonallyforwardto therightwhentheleft wheel initiallyturnsclockwiseand afteradelay,therightwheelalsostartsturningclockwise.It movesdiagonallyforwardtotheleftwhentherightwheel initiallyturnsclockwiseandafteradelay,theleftwheelalso starts turning clockwise. It moves diagonally backward to the right when the left wheel initially turns anticlockwise followedbytherightwheelafteradelay.Itmovesdiagonally backward to the left when the right wheel initially turns anticlockwisefollowedbytheleftwheelafteradelay.
ThePresentBluetooth-controlledwheelchairgivesasafety andstaunchsystem.Itprovidesacomfortablygetat-ableand different varieties of functions. In this, we developed a wheelchairthatincludesultrasonicsensorstosmarttrack thepathsandcandetecttheobjectsinthemiddleofthepath alongwithanabilityofmaintaininggoodcaretorefrainfrom tragedy,good resultsareobtained.Hence,pareticpeoples can be reliable-self, safely, and ease controlling with this wheelchair. Future changes can improve the wheelchair more.Thepresentedwheelchairwillbedonebyappending new advanced sensors, in order to make the wheelchair increased friendliness and to refrain from tragedy by learning-self. Security will be integrated for retrieval with theassistance.
1.AsakawaT.,NishiharaK.,YoshidomeT.:IEEEInternational Conference on Robotics and Biomimetics, pp. 1260-1265, China(2007).
2.KrishnamoorthyA,InternationalJournalofReconfigurable andEmbeddedSystems(IJRES),Vol.6,No.,pp.82~87ISSN: 2089- 4864, DOI: 10.11591/ijres.v6.i2.pp82-87. ( 2, July 2017).
3. Deepak Kumar Lodhi et al, International Journal of Computer Science and Mobile Computing, Vol. 5 Issue.5, May-2016,pg.433-438©,IJCSMC.(2016).
4.SimpsonRC,LoPrestiEF,HayashiS,GuoS,DingD,Cooper RA. Technology and Disability: Research, Design, Practice and Policy: 26th International Annual Conference on AssistiveTechnologyfor PeoplewithDisabilities(RESNA) [CD-ROM]; 2003 Jun 19–23; Atlanta, GA. Arlington (VA): RESNAPress;(2003).
5. Shaiju Paul, Ashlin Antony, Aswathy B., International. JournalofComputingandTechnology(IJCAT).Volume1,(1, February2014).