

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 p-ISSN: 2395-0072
Volume: 12 Issue: 06 | Jun 2025 www.irjet.net
Arduino-Controlled Boat For Floating Waste Collection In Rivers
Vaishnavi Chavan1 , Shrutika Shinde 2 , Rutuja Bhandare3 , Deepali Gaikwad4 ,U.S.Bhandari5
1,2,3,4U.G. Student,5Assistant Professor Department of Electronics &Telecommunication Engineering Shree Siddheshwar Women’s College Of Engineering Solapur
Abstract - Water pollution has become one of the most pressing environmental concerns, especially in rivers and other natural water bodies. This project focuses on building a simple and affordable boat designed to clean floating waste from river surfaces. The boat runs with the help of a conveyor mechanism that picks up debris and stores it in a container. It moves through water using DC motors, and its functions are managed by an Arduino Nano microcontroller. The system is intended to reduce human effort in cleaning and make the process safer and more efficient. Initial testing of the model in a controlled setting showed positive outcomes, suggesting it can be used in practical field conditions with some future improvements.
Key Words: Arduino Nano, River Waste Cleaner, Water Body Maintenance, Floating Debris Collector,etc
1.INTRODUCTION
Rivers play a vital role in the ecosystem, supporting both human life and biodiversity. Unfortunately, due to increasing urban activity and poor waste management practices, many rivers are now heavily polluted with floating debris such as plastic bottles, food wrappers, and othernon-biodegradablematerials.This pollutionnotonly threatens aquatic life but also affects water quality and public health in communities that rely on these water bodies. Manual methods of cleaning rivers are still widely used, but they tend to be slow, labor- intensive, and often dangerous forworkers.
1.1 LITERATURE REVIEW
Over the past decade, water pollution especially the accumulation of floating waste in rivers has become a growing concern for many urban and rural communities. Numerous efforts have been made to address this issue, primarily through manual methods involving workers with nets and boats to remove waste from the water surface.Whilesuchapproachescanbeeffectiveonasmall scale, they are time-consuming, labor-intensive, and sometimes dangerous, particularly in polluted or fastmoving water. To overcome these limitations, various mechanical and semi- automated solutions have been introduced.
1.2 Previous Efforts in River Waste Collection
The accumulation of waste in rivers has long been recognized as an environmental crisis, especially in
denselypopulatedareaswhereproperwastemanagement infrastructure is lacking. Traditionally, waste collection in rivers has relied heavily on manual labor, with workers usingboatsornetstocollectdebrisfromthesurface.This method, while effective on a small scale, often proves inefficient for larger water bodies or areas with high pollution
2. Arduino-Based Environmental Solutions
TheArduinoplatformhasemergedasapopularchoicefor developing low-cost, programmable solutions for environmental monitoring and automation. Its accessibility, affordability, and versatility make it a strong candidate for developing systems intended to solve realworld problems like water pollution. Arduino microcontrollers have been used in a variety of environmental projects, including water quality monitoring, weather stations, and smallroboticvehicles.
Table -1: Arduino-Based Environmental Monitoring Boat
Component Table
ArduinoNano ATmega328P,14 digitalI/Opins ControlUnit 1
DCMotor 12V,150RPM Propulsion 2
L298NMotor DriverModule DualH-Bridge,2A perchannel Motor Control 1
ConveyorBelt Motor 12Vgearedmotor Collection 1
UltrasonicSensor 2-400cmRange Obstacle Sensing 1
Arduinohasbecomeapracticalandaccessibleplatformfor developing real-world environmental solutions, especially in low-cost or student-led innovations. In this project, the ArduinoNanomicrocontrollerisresponsibleformanaging motor operations, controlling the conveyor mechanism, and ensuring reliable power distribution. Its ability to interface with sensors and actuators makes it ideal for semi- autonomous systems like river-cleaning boats. To give a detailed overview of the system, a component table has been included below that outlines the essential parts usedinthedevelopmentoftheprototype.Eachcomponent was selected based on functionality, cost-efficiency, and easeof integration with the Arduino platform. Along with the table, actual photographs of the circuit assembly,
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 06 | Jun 2025 www.irjet.net
Arduinowiring,andthe mountedcomponentsonthe boat areprovidedtogive readersabetterunderstandingofthe physical implementation. These visuals support the technical explanation and demonstrate that the project was constructed, tested, and evaluated by the authors throughhands-on experimentation.
Block Diagram -1: Arduino-Based Environmental Monitoring Boat
To better understand the working of the Arduino-based river cleaning boat, a block diagram has been included below.Thisdiagramvisuallyrepresentstheflowofpower and control signals between the major components of the system. The central controller, Arduino Nano, receives input from the ultrasonic sensor and sends output commands to the motor driver, which operates the DC motors responsible for boat propulsion. Simultaneously, the Arduino also controls the conveyor mechanism that collects floating waste. The system is powered by a 12V battery,whichmayoptionallybe chargedbyasolarpanel for sustainable energy use. This simplified visual helps clarify how each component interacts within the overall framework of the environmental monitoring boat. The block diagram represents the overall structure and working logic of the Arduino-based environmental monitoringboat.AttheheartofthesystemistheArduino Nanomicrocontroller,whichactsasthecentralcontroller, receiving inputs and sending commands tovarious components.Theboatispoweredbya12Vbattery,which also supplies energy to the motor driver and conveyor system.
3.Observed Outcomes
After assembling and testing the Arduino-based river cleaningboat,severalkeyoutcomeswereobservedduring controlled trials. The boat was successfully able to float andnavigateoverasmallwaterbodyusingtwoDCmotors.
p-ISSN: 2395-0072
The front-mounted conveyor mechanism operated smoothly and collected floating plastic wrappers, leaves, and small debris into the onboard bin. The Arduino Nano controlled all motor actions efficiently through the L298N driver module. The system responded well to manual on/off commands and maintained balance even with a moderatewasteload.Whenpoweredbya12Vbattery,the boat could run for approximately 2 to 3 hours continuously. The optional solar panel was also able to contribute partial charging under direct sunlight. Overall, the prototype met the expected functional goals of collecting floating waste with minimal human effort, offering a low-cost, safe, and efficient solution for small water bodies.
Component Arrangement

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 p-ISSN: 2395-0072
Volume: 12 Issue: 06 | Jun 2025 www.irjet.net
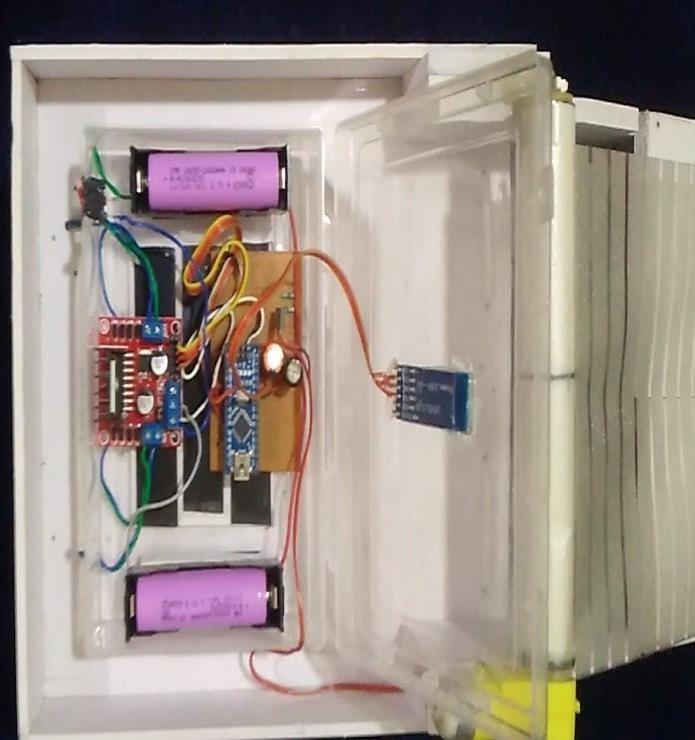
Component Identification with Direction in the Figure
Theinternal arrangement oftheboat's electronicsystem isshowninFigure. Eachcomponent hasbeen positioned carefully to maintain balance, power flow, and compact design. Belowisabreakdown ofeachvisibleelement
1. Lithium-ion Battery Cells(2Units)–Topand BottomofBox
o Color: Purple
o Position: One battery is fixed at the top and the second at the bottom inside the rectangular case.
o Function: Supplies power to the entire system.
2. Arduino Nano –Center-Right (BluePCB)
o Position: Mounted vertically on the right sideofthe redmotordriver module.
o Function: Acts as the main controller to operate motors andsensors.
3. L298N Motor Driver Module – Center-Left (Red PCBwithBlueTerminals)
o Position: Placed to the left of the Arduino Nano, has two blue screw terminals andtwoblackICs.
o Function: Controls direction and speed oftheDCmotors.
4. Voltage Regulator Circuit–Right ofArduino (on BrownPCB)
o Components Visible: Capacitors and connectors.
o Function: Regulates voltage to safely power Arduino andother components.
5. Bluetooth Module(LikelyHC-05/HC-06) –Far RightWallofBox
o Position: Stuck vertically to the rightsidewallusingtransparent tape.
o Function: Wireless control or communication interface.
6. Connecting Wires –Multicolored(Yellow, Red, Green, Blue,White)
o Position: Spread across the board connecting components.
o Function: Power and data transmission between components.
7. PlasticEnclosure – Whole Box
o Color: White
o Function: Holds all components safely, possiblywaterproof.
4. CONCLUSIONS
This research demonstrates the potential of using affordable and accessible microcontroller-based technologies, such as Arduino, to address pressing environmental issues like river pollution. The design and implementation of the Arduino- controlled boat proved effective in collecting floating waste with minimal human intervention. The integration of basic electronic componentswithsimplemechanicalstructuresresultedin alow-cost,energy-efficientsolutionsuitableforsmall-scale deployment in local water bodies. Through experimental trials, the system showed promise in navigating shallow waters and successfully capturing waste using its frontmounted collection mechanism. While there is scope for further improvement such as adding autonomous navigation, solar power integration, and enhanced waste detection the current prototype serves as a valuable foundation for future innovations in automated river cleaning systems. This project not only highlights the practical application of embedded systems in environmental engineering but also encourages continued researchandcommunityengagementinsustainablewater management practices. In addition to its technical functionality, this project holds significant potential for social and environmental impact. By deploying similar boats in lakes, ponds, canals, or drainage systems, local authoritiesandcommunitygroupscanactivelyparticipate in improving water quality and public health. The simplicity of the design makes it easy to maintain, repair, and upgrade based on specific environmental needs. Moreover,thissolutioncanbeintroducedinruralorsemiurban regions where manual labor is risky or insufficient. With proper funding, training, and collaboration with municipalbodiesorNGOs,thisrivercleaningboatcouldbe scaled and replicated across different locations. It also opens opportunities for student-led innovation in environmental technology and could serve as a practical modelforengineeringeducationfocusedonsustainability
ACKNOWLEDGEMENT
We would like to express our sincere gratitude to our guide, Prof. U. S. Bhandari, for his valuable guidance, continuous support, and encouragement throughout the development of this project. His suggestions and insights were instrumental in overcoming technical challenges duringthedesignandtesting phases.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 p-ISSN: 2395-0072
Volume: 12 Issue: 06 | Jun 2025 www.irjet.net
WearealsothankfultotheDepartmentofElectronicsand Telecommunication Engineering, Shree Siddheshwar Women’s College of Engineering, Solapur, for providing therequired laboratory facilitiesandresources.
Lastly, we extend our heartfelt thanks to our classmates, labassistants,andfamilymembersfortheirmoralsupport andmotivationduring this research work.
REFERENCES
[1] Government of India, Ministry of Jal Shakti, “Namami Gange Programme Overview,” 2023. [Online]. Available:https://jalshakti-dowr.gov.in
[2] Banerjee and K. Das, "A Study on Embedded Systems for River Surface Cleaning Applications," Journal of Environmental Engineering and Technology, vol. 4, no. 2,pp. 112–117, 2022.
[3] B. Singh andN. Sharma, "DesignandImplementation of a Low-Cost Arduino-Based Water Cleaning Robot," International Journal of Innovative Research in Science, Engineering and Technology, vol. 9, no. 5, pp. 1234–1240, 2021.
[4] M. Young, The Technical Writer’s Handbook. Mill Valley,CA:University Science, 1989.
[5] S. Kumar and P. Verma, “Design and development of anautomatedrivercleaningboat,” Int. J. Robot. Autom., vol.6,no.2,pp.101–106,2020.
[6] A. Dey and M. Sinha, “Microcontroller-based floating wastecollector:Asustainablemodelforurbanrivers,” in Proc. Nat. Symp. Sustainable Technol., 2021, pp. 55–60.
[7] R. Bhargava, “Smart solutions for water pollution usingembedded systems,” Indian J. Environ. Technol., vol.3, no.4,pp.35–40,2019.
[8] National MissionforCleanGanga, Annual Report 2022 Ministry of Jal Shakti, Govt. of India. [Online]. Available:https://nmcg.nic.in
[9] Arduino, “Getting started with Arduino UNO,” Arduino.cc. [Online]. Available: https://www.arduino.cc
[10] MIT App Inventor, “Create your own control app for Arduino projects,” [Online]. Available: https://appinventor.mit.edu
[11] K. Ghosh, "Low-Cost Water Surface Robot Using ArduinoandUltrasonicSensors," International Journal of Scientific & Engineering Research, vol. 12, no. 6, pp. 556–561,2021.
© 2025,IRJET | Impact Factor value: 8.315 | ISO 9001:2008