9 minute read
Grupo de Bomba Hidráulica de Suministro………………………………………83 Operación del Sistema


Después que el motor arranca hay un aumento de presión, el ECM señalará a la válvula del control la verdadera presión deseada indicando momentáneamente la energizacion y entonces regular el flujo actual al solenoide de la válvula del control de la bomba.
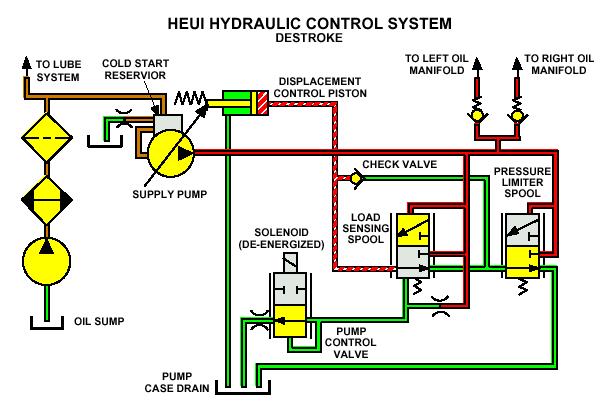
La disminución en la corriente aplicada al solenoide de la válvula del control de la bomba baja la presión requerida al iniciar el control del flujo. Esta presión más baja que llega en la válvula del control de bomba crea un desequilibrio de la fuerza en el carrete de sensor de carga, causando que el carrete se mueva hacia el tope del resorte del compensador. Este movimiento del carrete conecta el émbolo de control del desplazamiento al flujo de la salida de la bomba, permitiendo al plato desangular disminuyendo el desplazamiento de la bomba. El desplazamiento disminuido en la salida de la bomba mantiene la presión requerida por el ECM.

Durante el desangulamiento, el ECM momentáneamente desenergiza el solenoide y causa que la Válvula de Control de Bomba ingrese una presión a la cámara de resorte del Carrete del sensor de Carga.
Las presiones desequilibradas fuerzan al carrete a la izquierda, permitiendo que el aceite entre al embolo de control de desplazamiento y mueve el plato angulable hacia el mínimo ángulo.

Con el motor con carga un aumento de presión más alta se requiere, el ECM señalará a la válvula del control un aumento de presión, aumentando el flujo de corriente actual al solenoide de la válvula del control de la bomba.
El aumento en la corriente aplicada al solenoide de la válvula del control eleva la presión en la válvula del control de bomba. Esta presión más alta en la válvula del control de bomba crea un desequilibrio de la fuerza en el carrete del sensor de carga, causando que el carrete de control del plato se mueva hacia la derecha a su máximo recorrido. Esta abertura de movimiento del carrete en el émbolo de control de desplazamiento comunicara al drenaje de carcaza, permitiendo al plato moverse aumentando el desplazamiento de la bomba. El desplazamiento aumentado eleva la salida de descarga de la bomba al nivel y a la presión requerida por el ECM.
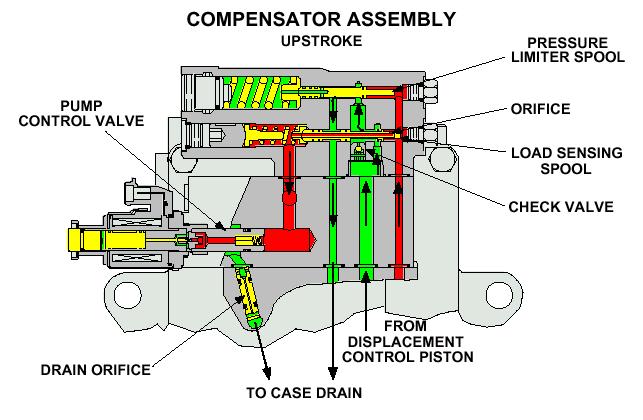
Como la carga es aplicada al motor, la corriente desde el ECM aumenta hacia la válvula de control de la bomba.
La presión es regulada por el carrete del sensor de carga. El carrete se mueve a la derecha (debido a la fuerza de resorte) y el aceite del Embolo del Control del Desplazamiento es drenado a la caja, permitiendo que el plato se vaya momentáneamente al ángulo máximo y cree la presión rápidamente.

Si el carrete del sensor de carga o la válvula de control de bomba tienen un funcionamiento defectuoso se crea mayor presión que las presiones deseadas de operación, el carrete limitador de presión máximo es utilizado. En este esquemático, un orificio tapado se simula. (Este ejemplo representa una condición verdadera que fue causada por suciedad que se introdujo durante un reemplazo en terreno de la válvula compensadora.)
El Carrete del Limitador de Presión dirige el flujo de salida al émbolo de control de bomba de desplazamiento y reduce la carrera de la bomba si la presión de sistema excede 25600 kPa (3700 psi). Durante estas condiciones, la bomba desarrollará 3600 a 3700 psi (24800 a 25600 kPa) la presión hidráulica máxima, a pesar de la presión deseada. La Lámpara del motor Check estará activada, indicando una falla.
Un test de Prueba de la Válvula del Control de la Bomba verificará la operación de válvula de control. Esta prueba habilita al técnico manualmente para subir y bajar los rangos de presión usando la herramienta del servicio de ET. Este procedimiento es también útil para evaluar la condición del sistema hidráulico.

Si la presión del suministro excede 3700 psi (25600 kPa), la fuerza actúa encontra de la almohada el Carrete Limitador de Presión y lo cambia a la izquierda. Este movimiento comprime el resorte y permite el paso de aceite al asiento la válvula check y presuriza el émbolo del control de desplazamiento. El plato angulable se mueve hacia un ángulo mínimo, la disminución del flujo y presión es limitada en el sistema.
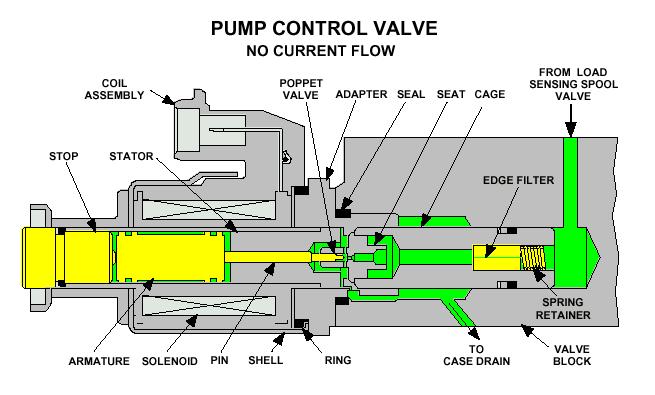
La válvula de Control esta montada en el conjunto que contiene el carrete del sensor de carga y el limitador de presión. En esta imagen, la válvula del control de bomba está abierta, permitiendo que la presión sea drenada a la caja.
El flujo desde el émbolo del control del desplazamiento es determinado por el conjunto de control de compensador y la válvula de control de bomba. El conjunto del control de compensador censa la presión de la salida de bomba por una línea de señal de presión piloto. La válvula del control de la bomba varía la presión al émbolo del control del desplazamiento variando la presión en la salida de la válvula de carrete del sensor de carga.
El carrete del sensor de carga dirige aceite al émbolo de control de desplazamiento. El carrete tiene un orificio por su centro, permitiendo que la presión piloto alcance la salida del carrete. La fuerza del resorte del carrete del sensor de carga es ajustada en la fábrica. La bomba desarrollará 725 psi (5000 kPa) con la válvula de solenoide de control de bomba desconectada mientras arranca el motor con los inyectores desactivados.

El nivel de presión de operación de suministro hidráulico es monitoreado por el sensor de presión hidráulica. Cuándo la presión hidráulica es menor que la deseada (determinado por el ECM), el nivel de corriente actual aplicado al solenoide de la válvula del control de la bomba es aumentado.
El aumento de la corriente al solenoide aumenta la presión requerida por la entrada del flujo de la válvula del control de bomba. Esta presión inicial de partida en la válvula del control de bomba crea un desequilibrio de la fuerza en el carrete del sensor de carga, causando que el carrete se mueva hacia la salida de la línea de señal de suministro del carrete. Este movimiento abre una descarga a la caja de la bomba, permitiendo al plato angulable aumentar el desplazamiento de la bomba.
El aumento del desplazamiento en la salida hidráulica es proporcionada por el ECM para los inyectores.
El sistema HEUI tiene seis alimentaciones con varios voltajes.
La alimentación externa del ECM es de 24 Voltios
La alimentación interna del ECM es de:
Sensor de Posición y Tiempo 12.5 Voltios
Alimentación para el Inyector de 105 Voltios
Alimentación Sensores Analógicos de 5 Voltios
Alimentación Sensor Digital de 8 Voltios
Válvula de Control de Bomba de 0 a 24 Voltios
Las alimentaciones se describen en detalle en la sección siguiente.

ALIMENTACION de ADEM
La alimentación al ECM y en el sistema esta dibujada una batería de 24 Voltios de máquina. Los componentes principales en este circuito son:
- Batería - Llave Interruptor de contacto - Relé Principal del Poder - Breaker15 Amp - Perno de masa (Tierra) - ECM (P1/JI Conector) - Conector de Comunicación de Máquina (J3/P3) *Si la tensión de alimentación excede 32.5 Voltios o es menos de 9.0 Voltios, un código diagnóstico se registra. (Vea la Guía de localización de fallas para detalles completos en registro de acontecimiento de voltaje.)
NOTA: El terminal de masa es el componente del suministro único poder montado en el motor.
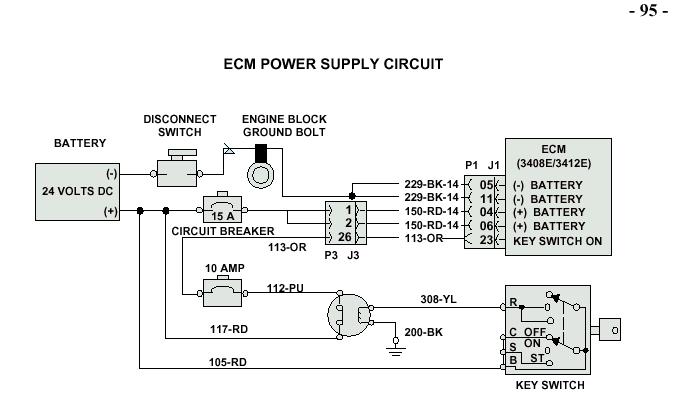
Estas imágenes esquemáticas muestran los componentes para un circuito típico de la alimentación. El voltaje de la batería es conectado normalmente al ECM. Sin embargo, una entrada del interruptor de la llave de contacto energiza el ECM.
El arnés de máquina se pueden simular para propósitos de localización de fallas. Estos pasos se describen en el Procedimiento de localización de fallas. La Tensión de alimentación se puede verificar usando la pantalla de Posición del ET.
NOTA: Los cables de la alimentación son apareados para reducir la resistencia.
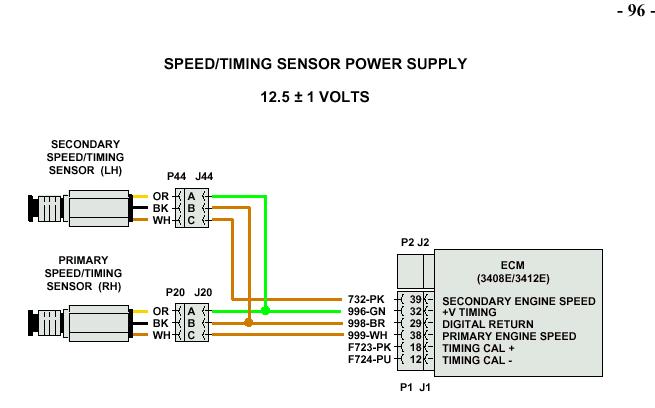
Los sensores de Sincronización tienen una alimentación en común. El ECM suministra 12.5 ± 1 Voltios a los sensores de Velocidad Primario/Secundario. Los conectores A y B envían la alimentación común a los sensores. Los alambres C transmiten las señales independiente al ECM. Esta alimentación no es el voltaje de batería, pero se engendra y es regulada dentro de 1.0 voltio por el ECM. Una falla de la alimentación en el ECM causará que ambos sensores fallen y el motor se detendrá ya que los sensores comparten la alimentación común. NOTA Conectando la alimentación a otro sistema o accesorio a los Sensores de Velocidad/tiempo pueden causar la falla del motor.

El ECM suministra Alimentaciones de 105 Voltios a los inyectores a través del conector J58/P58. Por esta razón, las precauciones correspondientes se deben observar cuándo realiza la inspección alrededor de las tapas de válvula. En el 3412E, dos alimentaciones separadas se usan para los inyectores. Si una falla ocurre, sólo un banco de inyectores podrían haber fallado. (En el 3408E, sólo una alimentación es usada.) Si un circuito abierto brevemente ocurre en el circuito del inyector, el ECM incapacitará ese inyector. El ECM tratará periódicamente a acciona ese inyector para determinar si el defecto está presente de forma pasiva, él desconectará o conectará de nuevo el inyector.

Alimentación Sensores Análogos
La Alimentación de los Sensores Análogos es generada a todos los sensores análogos (sensores de presión y temperatura). El ECM suministra 5.0 ± 0.2 Voltios DC ( Suministro Analógico) por el conector J1/P1 a cada sensor. Una falla de la alimentación causará que todos sensores analógicos aparezcan con falla. La alimentación esta protegida contra cortos circuitos, que significa que un corto en un sensor o un arnés de alambrado no causará al daño al ECM.

Alimentación Sensores Digitales
El voltaje de suministro del ECM es de 8 ±0.5 Voltios por el conector J1/P1 a los siguientes circuitos:
- Sensor de Posición del Acelerador
- Sensor de Velocidad de Ventilador (sí esta instalado)
- Sensor de Temperatura de Escape (puede ser instalado para mejor rendimiento en motores industriales)
La alimentación se protege contra corto circuitos, que significa que un corto en un sensor no causará daño al ECM.