Digi-Load
TEMADAG OM PROJEKTET DIGI-LOAD:
Automation för ytbehandlare
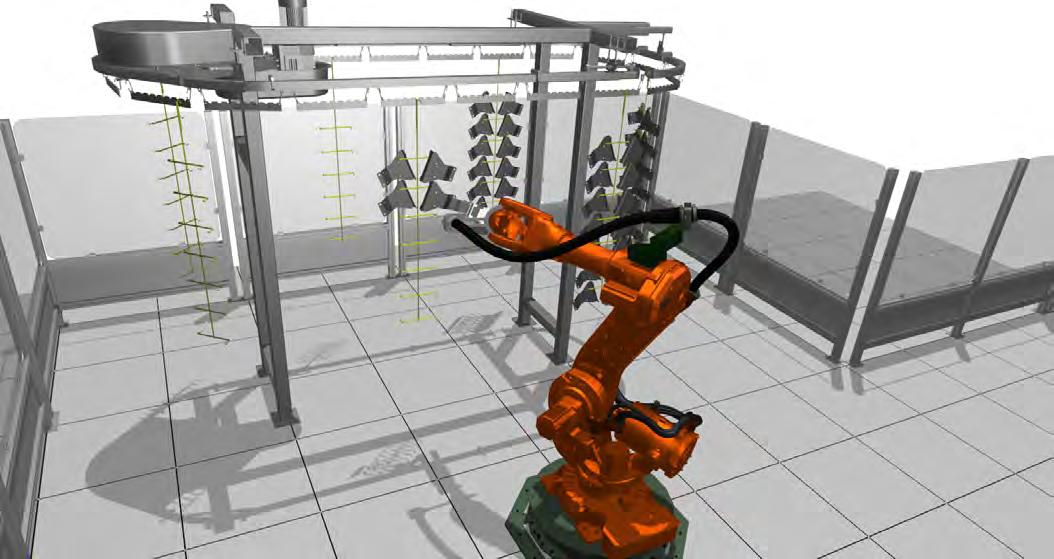
Bild: Fraunhofer Chalmers Centre
D
en 16 september genomfördes en temadag om automation för ytbehandlare i projektet Digi-Loads regi. Evenemanget genomfördes digitalt under ledning av Charlotte Ireholm, Rise IVF. Drygt 60 personer deltog från cirka 35 olika företag. Under dagen genomfördes tolv presentationer dels från resultaten från projektet, dels från industriella erfarenheter utanför Digi-Load. Eventet avslutades med en kortare workshop där deltagarna i grupper diskuterade framtidsinriktade frågeställningar. Digi-Load är ett treårigt projekt som nu går mot sitt slut. Budgeten har varit på närmare tretton miljoner kronor och har till 60 % finansierats av industrin och resterade 40 % via statliga bidrag. Den tvärfunktionella projektgruppen består av ytbehandlare, leverantörer, forskningsinstitut och branschföreningar. Fyra miljöer har byggts upp varav en i en virtuell värld. I följande text görs en kort summering av vad som behandlades under dagen.
12
HÄNGNING OFFLINE OCH ONLINE
Hängning av detaljer för ytbehandling kan göras offline för att sedan, med hjälp av en transportör eller conveyor, föras vidare till själva ytbehandlingen. Ett annat alternativ är att hänga direkt på en conveyor i rörelse, det vill säga online. Sebastian Fägerstrand (Miba) och Ingemar Reyier (Robotdalen) redovisade för- och nackdelar med de olika angreppssätten. Även om hängning online innebär minimala förändringar jämfört med manuell hängning innebär det också tydliga svårigheter. Det kan vara svårt för roboten att hinna med att hänga på alla objekt under tiden fixturen är inom robotens räckvidd. Det är också svårt för roboten att följa fixturernas pendelrörelser. En slutsats var att det kan vara bättre att hänga på fixturen offline och sedan hänga på den online. Oberoende av hur man väljer att arbeta med robot krävs lämpliga former av gripdon. Kai Hübner, Gleechi, beskrev hur smarta gripdon arbetar med stöd av sensorer och artificiell intelligens. Vision system är en central komponent i många automationslösningar. Mikael Steiner,
Unibap, redogjorde för olika lösningar för identifiering av artiklar och dess position samt avsyning.
90 MINUTERS UPPLÄRNING
Med hjälp av en Universal Robots UR10 var målet med ett examensarbete, lett av Björn Backman, Rise, att utveckla en generell modell för hängning av små komponenter. Två teknologer, utan erfarenheter från robotanvändning, fick en inledande webbaserad utbildning på en och en halv timme innan själva arbetet började. Projektet visade att denna typ av robot har goda förutsättningar att vara en förhållandevis prisvärd lösning som har måttliga krav på förkunskaper. Samtidigt identifierades utmaningar så som att fixturer måste vara robusta för att krokarna inte ska böjas. Dessutom måste säkerhetsaspekter beaktas. Denna fråga behandlade Åke Törnros, Sick, som redogjorde för hur man med hjälp av laserscanner kan få en säker arbetsplats med en kollaborativ robot. Scannern känner av när en människa kommer i närheten av robotens