AndersHansson Ander sson
CONTROL CONT
ENGINEERING ENGINEER
An Introduction
CONTROL ENGINEERING
CONTROL ENGINEERING
An Introduction
ANDERS HANSSON
Linköping 2025
©2025 Anders Hansson
Publisher:BoD·BooksonDemand,Östermalmstorg1,11442Stockholm, Sverige,bod@bod.se
Print:LibriPlureosGmbH,Friedensallee273,22763Hamburg,Tyskland
ISBN:978-91-8097-838-5
To Erik
Preface
Control engineering is asubject that is taught at most engineering programs. It has applications within widelydifferent disciplines,from biotechnology to space technology.This textbook primarily treats thetheoretical fundamentalsincontrolengineering and covers thematerial, whichis typicallytaught in abasic course in control engineering,and alittle more.The book is also aimed at engineers in industrywho want to improve or renewtheir knowledge withinthe subject. The firstthree chapters focusondescribing dynamic systems and understanding concepts suchasstability and instability.The fourth chapterdiscusses howcontrollers canbeimplemented digitallyincomputers. Chapter five and six discuss howone can use theLaplace transformto analyze andsynthesize controllers withdesired performance.The chapters following thereupon discuss howstate-spacedescriptions canbeusedfor thesame purpose. The tenthchapterdiscusses reinforcement learning.Thereafterisdiscussed in thefollowing chapters howone can analyze and synthesize controllers in thefrequency domain.Inthe lastchapterisdiscussedfundamentallimitations in control engineering. Thebook can be usedfor courseswithverydifferent ambition levels.A very basic course can encompass onlythe six firstchapters. If one wantstoinclude state-space formsone can add chapter7–9 and possibly 10. If one wants to include frequencydescriptions one canadd chapter11–12 and possibly13. Material which is notcentral fora basiccourse in control engineeringiseither markedwithanasterisk after thenameofthe section or with smaller font. This book is atranslation of theSwedish book ”Reglerteknik—En Introduktion”. Iwant to thank Daniel Axehill, Robin Forsling,Joel Nilsson and Bo Wahlbergfor comments on themanuscript. GustafHendebyisthanked for help withLATEX.
Linköping, October 2025 AndersHansson
Chapter 1 Introduction
Control engineering deals withthe theoryofcontrolledsystems,and aboveall, technical systemsthatare controlled. Inspiration to theprinciples used is found, however, in nature, and especiallyconcerning systems that are controlled through feedback.Feedbackisused, forexample, in humans to enable us to stand ononlytwo legs. Sensoryorgans in theears sense which waythe body is moving, afterwhichthe brain determineshow themusclesin thefeetshould correct so that we do notfall. In technicalterms,one can saythat thesensoryorgans in theears are sensors that measure howweare moving, and that thebrain has amechanism that regulates our movement by ordering the muscles howtheyshould correct forthe fact that we are notstanding straight up.
It should be notedthat thefeedback principledescribed above differs significantlyfrom so-called open loop control or synonymously feedforwardcontrol Withfeedforward control,one determines howtocontrolwithout measuring how one is behaving. Atypical example of this is awashing machine where thewash programispredetermined andexecuted without measuring whether thelaundryhas become clean or not. We will primarilydeal withfeedbackcontrol in this book. This does notmean that feedforward controlisnot important, or something that should notbeused.Nor is it thecase that one should either use feedforwardcontrol or feedbackcontrol;instead, themethods can advantageously becombined.
Feedforward control canbeused to eliminate theeffect of disturbances. A typical example is the firstsystems fortemperature control of houses, where the flow temperature, i.e., thetemperature of thewater to theradiators,was made dependentonthe outdoor temperature, which can be considered as adisturbance. Provided that one has agood description of howthe indoor temperature
depends on theoutdoor temperature and the flow temperature, one can obtain good control withfeedforward control. One realizes that this is notalwayssosimple, because theindoor temperature canalso depend on wind, solar radiation through windows,extraheat sources, e.g. in the form of peoplewho are in thehouse, whether awindowisopen or not, and so on. However, one can reasonably eliminatepartofthe error in thecontrol withfeedforward control,and obviouslyproactively, as one doesnot need to wait to supplyheattothe house until it has cooled down and is noticeable in theindoor temperature, but as soon as one notices that it is getting colder outside. This is an advantageoffeedforward controlover feedbackcontrol, whichcannottakeactionuntil it has been noticedthat the temperature has changed indoors. One can combine feedbackcontrol with feedforwardcontrol, and this is also done in modern systemsfor heating houses. Here, one oftenregulates the flow temperaturewithfeedforward control, and thetemperature in theroomsis fine-tuned withfeedbackcontrolwhere theradiator valvesare controlled based on themeasurement of theroom temperature. We note that if one onlyuses feedforward control, one onlyneedsone sensorfor measurement, and one onlymeasures theoutdoor temperature, while if onealso uses feedbackcontrol, one mustalso measure theindoortemperature.One can reasonablyexpect to obtain better performance when combining feedforward control and feedbackcontrol. When considering whichtype of control to use for aspecifictechnical problem,one should notonlyconsider theperformance one can obtain, but one should also considerwhat thecostisfor theproposed solution, and it is self-evident that themore variablesthat mustbemeasured, the moreexpensivethe solution usuallybecomes.Thus, there is forthe mostparta trade-off that mustbemade between possible performance andthe costofequipment. We will notaddress that trade-off in this book.Insummary, onecan say that controlengineering is usuallyabout determining acontrol actionbasedon measurements so that asystem’spurpose is achieveddespite theinfluence of theenvironment.
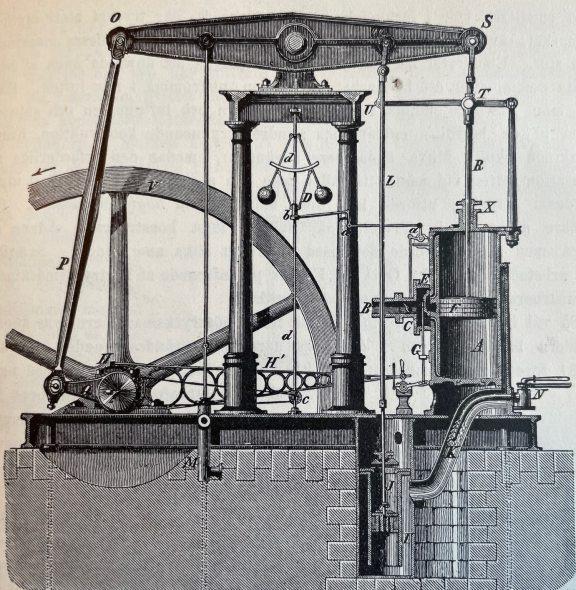
Figure 1.1: Watt’s steam engine (Uppfinningarnas bok, II,Aktiebolaget Hiertasbokförlag, Stockholm, 1901,p 539).
1.1History
Control engineering’smoderndevelopment took place during theindustrialization in the19thcentury. An important example is speedcontrol of steam engines by JamesWatt in thelate18thcentury, see Figure 1.1, whichmade it possible forrotating machines to be drivenata constant speed regardless of howmuchpower wasdrawn from thesteam engine. Other important breakthroughs were Lawrence Sperry’s autopilotfor aircraftin1914, whichenabled automatic course keeping. The feedback amplifier wasinvented in thelate 1920s by HaroldStephen Blackand quicklyfound applications in telecommunicationnetworks, among others.Feedback ensured theelimination of thesevere nonlinearities that thevacuum tube amplifiers of thetime were afflicted with. The principleisthe sameasthat used todayfor feedbackoperational amplifiers. Controlengineering wasstill nota subject in its ownright withabody of theory. Thefoundationfor this was laid during theyears surrounding theSecond WorldWar in connection withthe development of various weapon systems forcontrolling ships, aircraft, cannons and radar antennas. The theorywas built withthe Laplace transformand the Fourier transformasabasis, and these are also some of thetoolsthat we shall learntouse in this book.
1.2Applications

Figure 1.2: Fermentation tanksina brewery.Reproduced withpermission from Pixabay.
We shall nowreviewsomeofthe mostimportant applicationsofcontrol engineeringinour society.
Industrial Automation: In themanufacturing industry,control engineering is used to monitor and control processes suchasthe production of chemicalproducts, food processing, andthe manufacture of electronics.Ithelps to ensure product quality,minimize waste, andoptimize production processes.
Robotics and automation: In therobotics andautomation industry, controlengineering is used to control movements, positioning, andperformance of robots


Figure 1.3: Various control engineering applications.Reproduced withpermission from Pixabay. and automatedmachines. It enables precision and repeatability in manufacturingprocesses.
Chemical and pharmaceutical production: In thechemicaland pharmaceuticalindustries, control engineering is usedtocontrol complexchemicalreactions and processes. It is crucialfor ensuring that theproducts meethigh-quality standards and aresafefor consumers. Figure 1.2shows fermentation tanksin abrewery where,among other things, thetemperature in thetanksisregulated.
Building automation: In theconstruction sector,controlengineering is used to automateand control systemssuchasheating, ventilation, and air conditioning as well as lighting systemsinbuildings. This results in increased comfortand energy efficiency.
EnvironmentalProtection: Control engineering is used to monitor and regulate environmental parameters suchaswater quality,air quality,and waste management. Inthe waterand sewage industry, controlengineering is usedto monitor andregulatewater purification processes, distribution of drinking water, and sewage treatment. Itcontributes to ensuring that thewater is safeto consume and that thewastewateristreated effectivelybefore it is releasedback into theenvironment. Figure 1.3a shows waterpurification.
Energy Supply: In theenergy industry, control engineeringisusedtomonitor and regulatepower generation and distribution. It helps to balance theenergy flow,optimizepower plant efficiency,and manageload fluctuations. Figure 1.3b shows awind farm forgenerating electricity.
(a) Waterpurification.
(b) Wind farm.
CONTROLENGINEERING CONTROLENG
AndersHansson
This book introduces thesubjectofcontrol engineering in amodernway.Itis suitable as literaturefor abasic courseincontrol engineering .Itcoverstraditional methods based on
• The Laplace transform
• Statespacedescriptions
• Frequencydescriptions
At thebeginning ofthe book, thefocus is on simple design methodssuchas λtuning of PID controllersand othercontrollerswithaninternalmodel. Possibilities and limitations forthese methods arediscussed in detail. Moreadvanced design methods basedonpoleplacement, statefeedback,and stateestimation as well as loop shaping in thefrequencydomainare also discussed thoroughlyinlater parts of thebook. Thebook also treats digitalimplementation of controllers at an early stage. Nonlinear phenomena arediscussed, butthe focus is on linear descriptions. As is traditional,mainlyfinite-dimensionallinear systems arediscussed,but where possible, generalizations have also been made to infinite-dimensionalsystems.This means that systems withtimedelays aretreated in arigorous way. Fundamental limitations in control arediscussed separatelyina concluding chapter. Thebook also contains an introduction to reinforcement learning.
Hansson