[PROT_TCUE23-24_020]
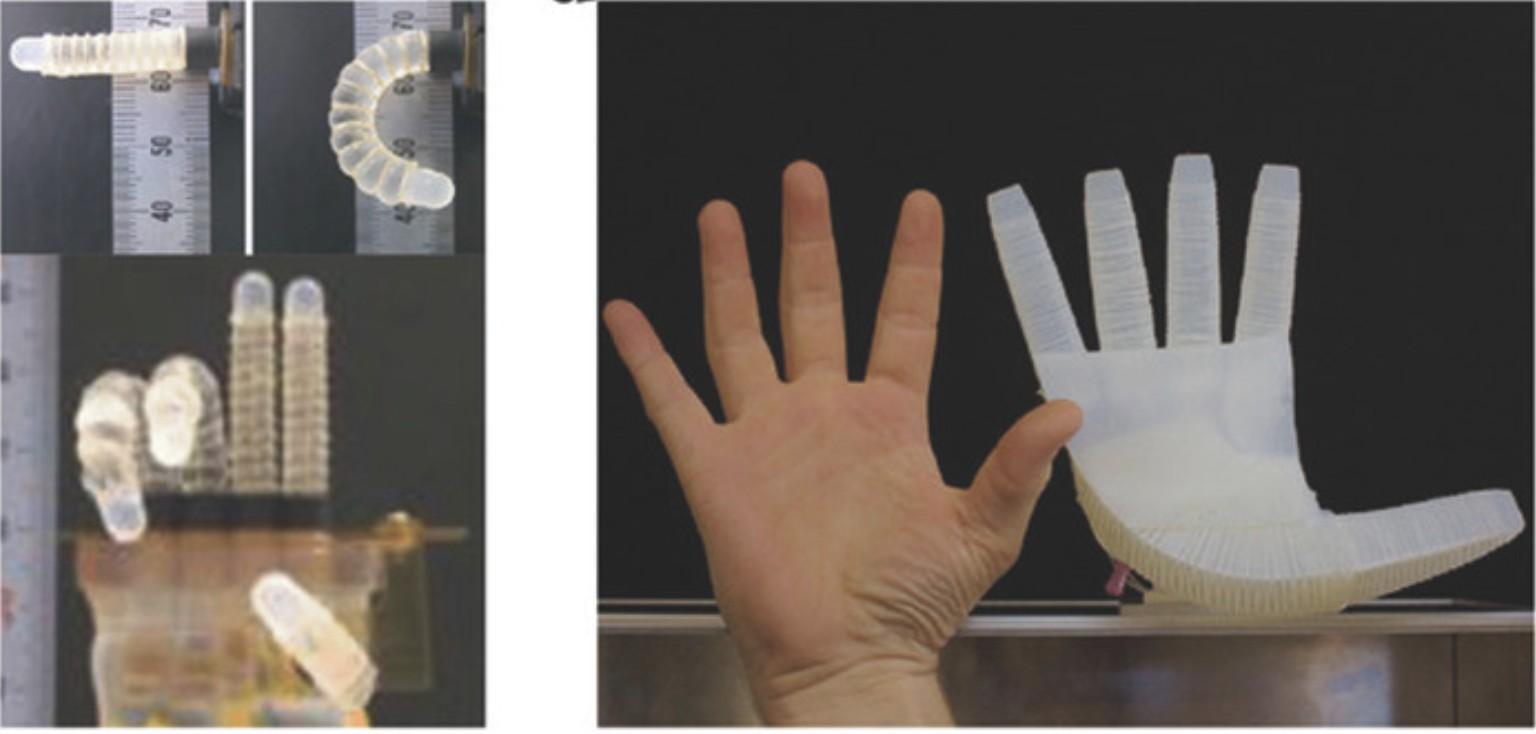
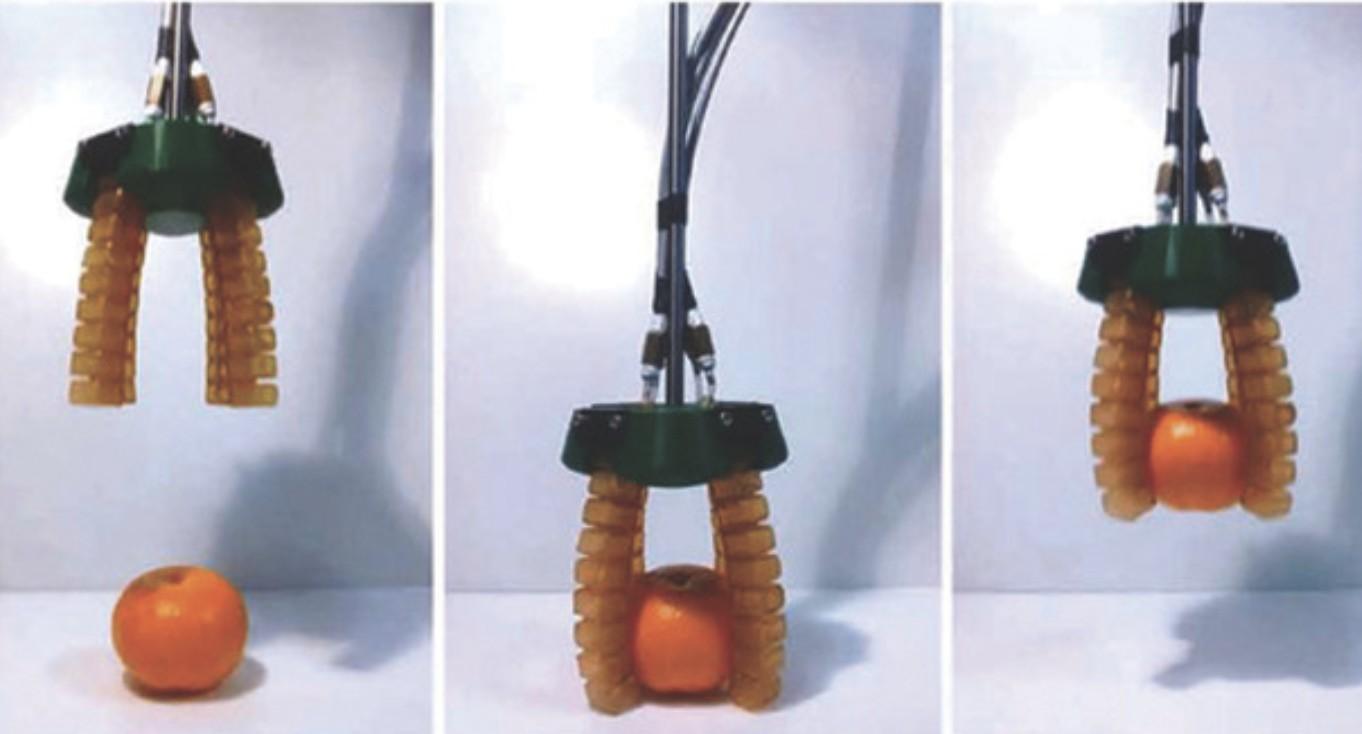
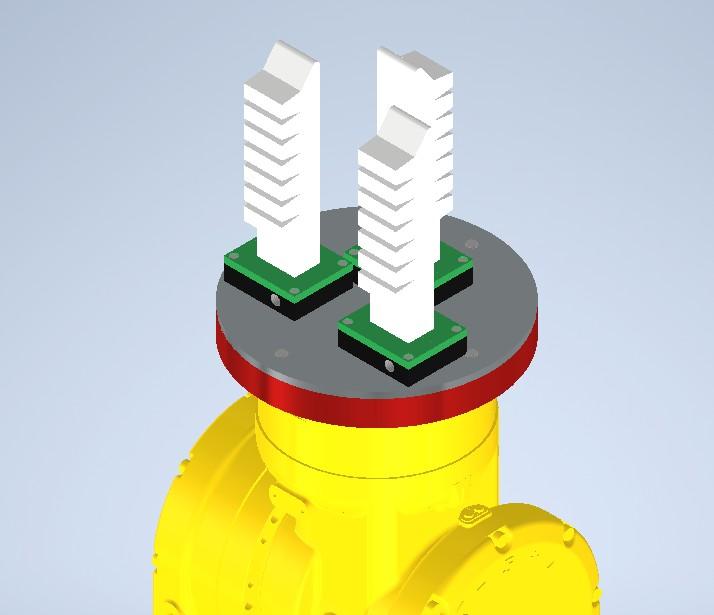
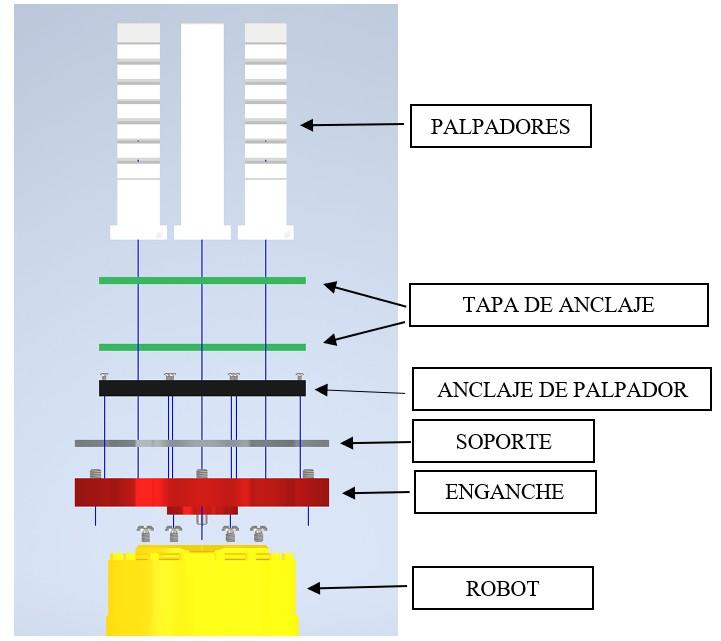
Este proyecto se centra en el desarrollo de un gripper robótico blando basado en tecnología soft robotics, diseñado específicamente para la manipulación de aros metálicos pesados en entornos industriales. A diferencia de las pinzas robóticas convencionales, este diseño ofrece una mayor adaptabilidad y flexibilidad gracias a la utilización de geometrías biomiméticas que aumentan la rigidez en la posición cerrada. Además, su modularidad y capacidad para soportar altas cargas lo hacen ideal para diversas aplicaciones industriales.
=============================
AUTOR: Darío Hurtado Cantero
TUTOR: Andrés Sanz García
Más información: tcue.usal.es
=============================
UNIVERSIDAD DE SALAMANCA - Fundación General
https://tcue.usal.es/prototipos-orientados-al-mercado
#PlanTCUE #USAL #Transferencia
______________________________________________________________________
Esta actuación se enmarca en el PLAN TCUE 2024-2027 financiado por la Consejería de Educación de la Junta de Castilla y Le