Numerical Analysis of the Discrete, Fractional Order PID Controller using FOBD and CFE Approximations
Michał Tyrpa, Jacek Piskorowski
Rejection of Power-Line Interference in EMG Signals Using a Notch Filter
Initialized with Non-Zero States
Szymon Elert
Identification and Compensation of Gyroscope Measurement Errors: Signal Filtering Based on Static and Dynamic Measurements in an Inertial Navigation System
Jan Kapusta, Waldemar Bauer, Jerzy Baranowski
29
39
47
Ocena skuteczności systemów ochrony cyberfizycznej z uwzględnieniem degradacji elektronicznych systemów zabezpieczeń
Jacek Szklarski, Ela Zawidzka, Tomasz Ponikiewski, Machi Zawidzki
Algorytm przeszukiwania z zakazami do optymalizacji czasu komunikacji w środowisku inżynierskim CPDev
Ponadto:
Informacje dla Autorów – 129 | Nasze Wydawnictwa – 133 | Awans naukowy – kmdr por. dr hab. inż. Paweł Piskur – 134 | Repozytorium Robotyki – III okładka |
Rok 29 (2025) Nr 3 (257)
ISSN 1427-9126, Indeks 339512
Redaktor naczelny
prof. Cezary Zieliński
Zastępca redaktora naczelnego dr inż. Małgorzata Kaliczyńska
Zespół redakcyjny dr inż. Jerzy Borzymiński
prof. Wojciech Grega – automatyka prof. Krzysztof Janiszowski dr inż. Małgorzata Kaliczyńska – redaktor merytoryczny/statystyczny dr inż. Michał Nowicki – mechatronika prof. Mateusz Turkowski – metrologia prof. Cezary Zieliński – robotyka
Korekta
dr inż. Janusz Madejski
Skład i redakcja techniczna
Ewa Markowska
Druk
Drukarnia „PAPER & TINTA” Barbara Tokłowska Sp. K. Nakład 400 egz.
Wydawca
Sieć Badawcza Łukasiewicz –Przemysłowy Instytut Automatyki i Pomiarów PIAP Al. Jerozolimskie 202, 02-486 Warszawa
Pomiary Automatyka Robotyka jest czasopismem naukowo-technicznym obecnym na rynku od 1997 r. Przez 18 lat ukazywało się jako miesięcznik. Aktualnie wydawany kwartalnik zawiera artykuły recenzowane, prezentujące wyniki teoretyczne i praktyczne prowadzonych prac naukowo-badawczych w zakresie szeroko rozumianej automatyki, robotyki i metrologii. Kwartalnik naukowo-techniczny Pomiary Automatyka Robotyka jest indeksowany w bazach BAZTECH, Google Scholar oraz ICI Journals Master List (ICV 2023: 98,13), a także w bazie naukowych i branżowych polskich czasopism elektronicznych ARIANTA. Przyłączając się do realizacji idei Otwartej Nauki, udostępniamy bezpłatnie wszystkie artykuły naukowe publikowane w kwartalniku naukowo-technicznym Pomiary Automatyka Robotyka. Wersją pierwotną (referencyjną) jest wersja papierowa.
Punktacja Ministerstwa Edukacji i Nauki za publikacje naukowe w kwartalniku Pomiary Automatyka Robotyka wynosi obecnie 70 pkt. (wykaz czasopism naukowych i recenzowanych materiałów z konferencji międzynarodowych z dnia 5 stycznia 2024 r., poz. 29984). Przypisane dyscypliny naukowe – automatyka, elektronika, elektrotechnika i technologie kosmiczne.
Kwartalnik jest organem wydawniczym Polskiego Stowarzyszenia Pomiarów, Automatyki i Robotyki POLSPAR – organizacji prowadzącej działalność naukowo-techniczną w obszarze metrologii, automatyki, robotyki i pomiarów, reprezentującej Polskę w międzynarodowych organizacjach IFAC, IFR, IMEKO.
Rada Naukowa
prof. Jan Awrejcewicz
Katedra Automatyki, Biomechaniki i Mechatroniki, Politechnika Łódzka
prof. Milan Dado University of Žilina (Słowacja)
prof. Ignacy Dulęba Wydział Elektroniki, Fotoniki i Mikrosystemów, Politechnika Wrocławska
prof. Tadeusz Glinka Instytut Elektrotechniki i Informatyki, Politechnika Śląska
prof. Evangelos V. Hristoforou National Technical University of Athens (Grecja)
dr Oleg Ivlev University of Bremen (Niemcy)
prof. Larysa A. Koshevaja Narodowy Uniwersytet Lotnictwa, Kiev (Ukraina)
prof. Igor P. Kurytnik
Małopolska Uczelnia Państwowa im. rot. W. Pileckiego
prof. J. Tenreiro Machado Polytechnic Institute of Porto (Portugalia)
prof. Jacek Malec
Lund University (Szwecja)
prof. Andrzej Masłowski Sieć Badawcza Łukasiewicz –Przemysłowy Instytut Automatyki i Pomiarów PIAP, Warszawa
prof. Maciej Michałek
Wydział Automatyki, Robotyki i Elektrotechniki, Politechnika Poznańska
dr Vassilis C. Moulianitis University of Patras (Grecja)
prof. Joanicjusz Nazarko
Wydział Inżynierii Zarządzania, Politechnika Białostocka
prof. Serhiy Prokhorenko
„Lviv Polytechnic” National University (Ukraina)
prof. Eugeniusz Ratajczyk
Wydział Inżynierii i Zarządzania, Wyższa Szkoła Ekologii i Zarządzania w Warszawie
prof. Jerzy Sąsiadek
Carleton University (Kanada)
prof. Rossi Setchi
Cardiff University (Wielka Brytania)
prof. Waldemar Skomudek
Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej, Akademia Górniczo-Hutnicza
dr Dragan Stokic
ATB – Institute for Applied Systems Technology Bremen GmbH (Niemcy)
prof. Eugeniusz Świtoński
Wydział Mechaniczny Technologiczny, Politechnika Śląska
prof. Peter Švec
Slovak Academy of Sciences (Słowacja)
prof. Wojciech Włodarski
RMIT University, Melbourne (Australia)
prof. Eugenij T. Volodarsky
„Kyiv Polytechnic” National University (Ukraina)
Wydawanie kwartalnika Pomiary Automatyka Robotyka – zadanie finansowane w ramach umowy 907/P-DUN/2019 ze środków Ministra Nauki i Szkolnictwa Wyższego przeznaczonych na działalność upowszechniającą naukę.
Spis treści
3 Od Redakcji
5 Krzysztof Oprzędkiewicz
Numerical Analysis of the Discrete, Fractional Order PID Controller using FOBD and CFE Approximations Analiza numeryczna dyskretnego regulatora PID niecałkowitego rzędu, wykorzystującego aproksymacje FOBD i CFE
13 Michał Tyrpa, Jacek Piskorowski
Rejection of Power-Line Interference in EMG Signals Using a Notch Filter Initialized with Non-Zero States Tłumienie zakłóceń od sieci energetycznej w sygnałach EMG za pomocą filtru Notch z niezerowymi warunkami początkowymi
19 Szymon Elert
Identif ication and Compensation of Gyroscope Measurement Errors: Signal Filtering Based on Static and Dynamic Measurements in an Inertial Navigation System Identyfikacja i kompensacja błędów pomiarowych giroskopów: filtracja sygnałów na podstawie badań statycznych i dynamicznych inercyjnego systemu nawigacji
29 Jan Kapusta, Waldemar Bauer, Jerzy Baranowski Ocena skuteczności systemów ochrony cyberfizycznej z uwzględnieniem degradacji elektronicznych systemów zabezpieczeń
Evaluation of the Effectiveness of Cyber-Physical Protection Systems Considering the Degradation of Electronic Security Systems
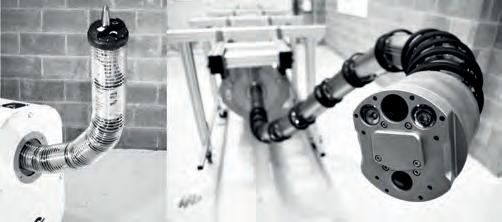
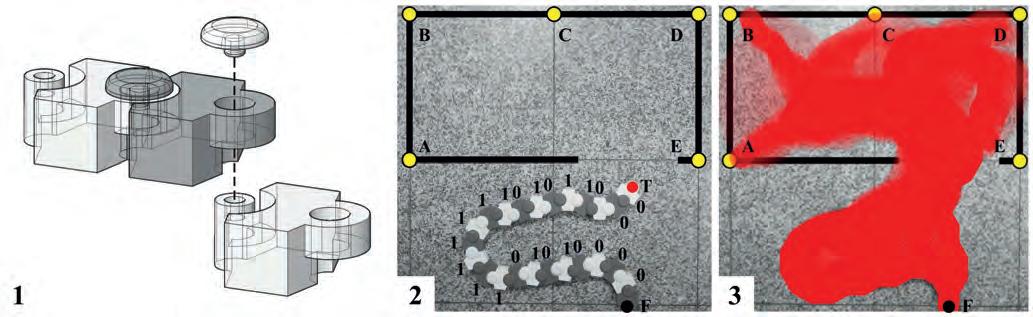
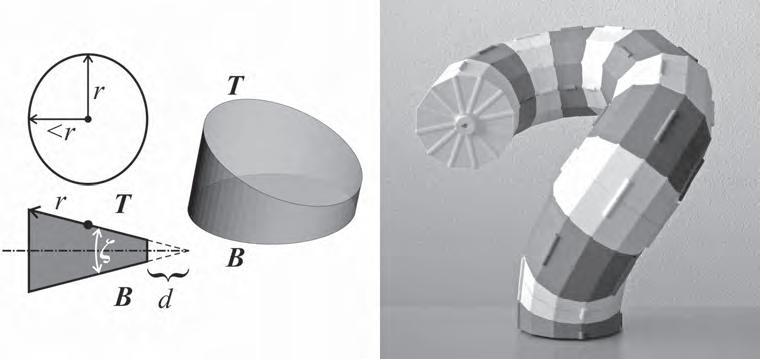
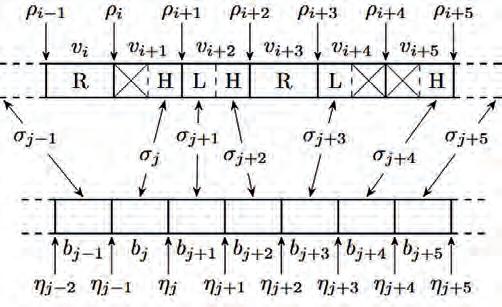
39 Jacek Szklarski, Ela Zawidzka, Tomasz Ponikiewski, Machi Zawidzki Symulacja inspekcji przestrzennej ekstremalnie modularnym hiper-redundantnym manipulatorem Arm-Z
Simulation of Spatial Inspection with Arm-Z – the Extremely Modular Hyper-Redundant Manipulator
47 Andrzej Bożek, Dariusz Rzońca Algorytm przeszukiwania z zakazami do optymalizacji czasu komunikacji w środowisku inżynierskim CPDev Tabu Search Algorithm for Communication Time Optimization in the CPDev Engineering Environment
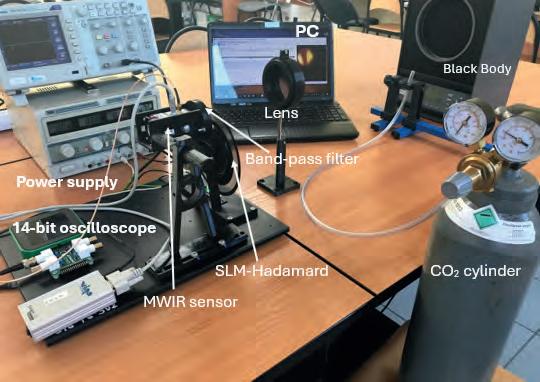
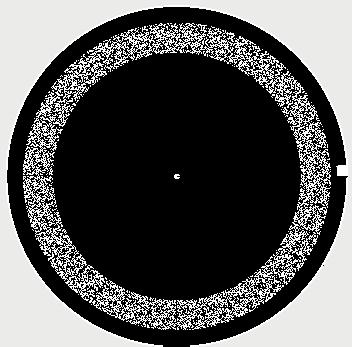
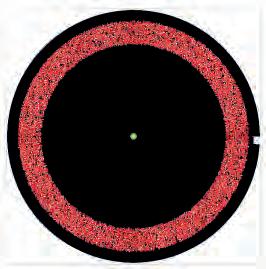
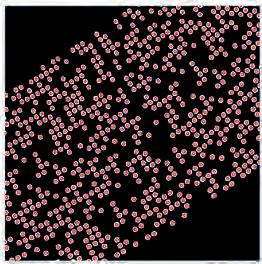
59 Sebastian Urbaś, Robert Olbrycht, Bogusław Więcek
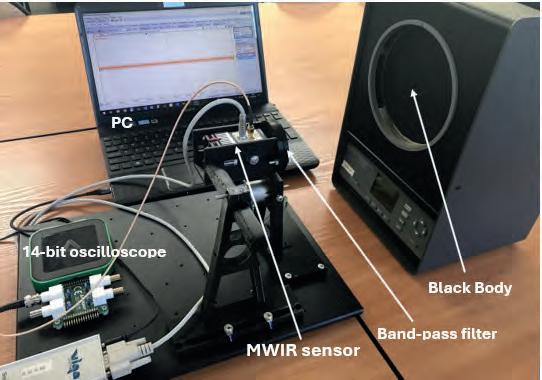
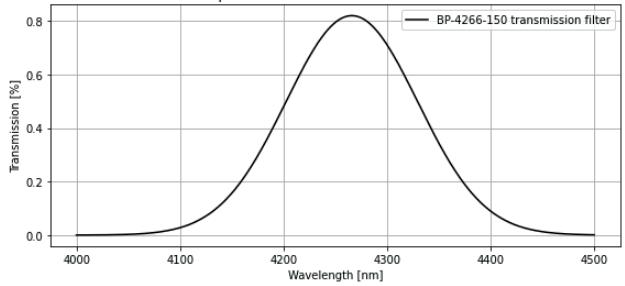
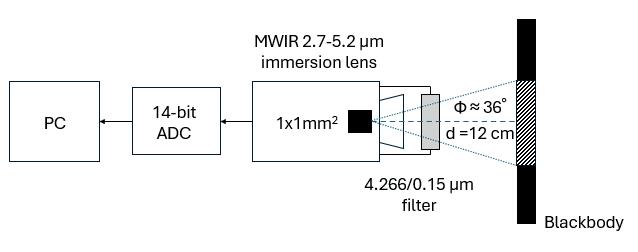
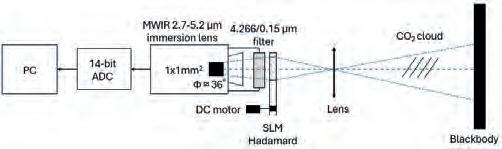
Determination of the NETD Parameter Value of the Imaging System with a Single MWIR Detector for CO2 Detection Wyznaczanie wartości parametru NETD systemu obrazowania z pojedynczym detektorem MWIR do detekcji CO2
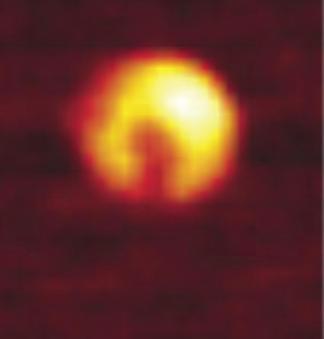
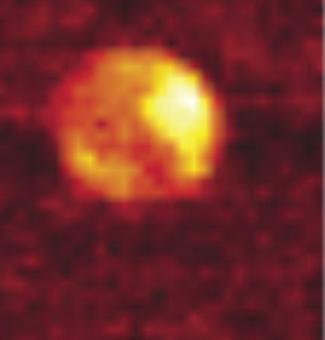
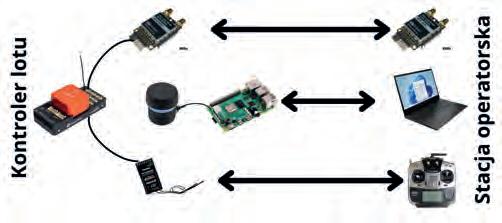
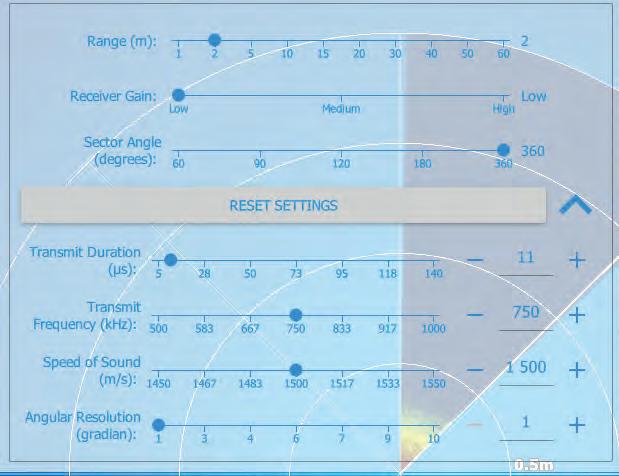
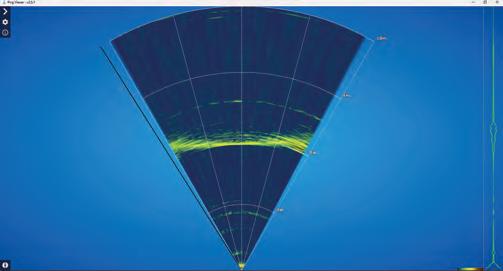
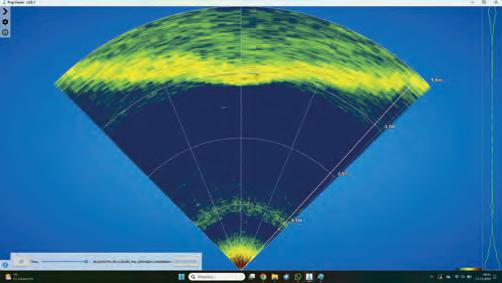
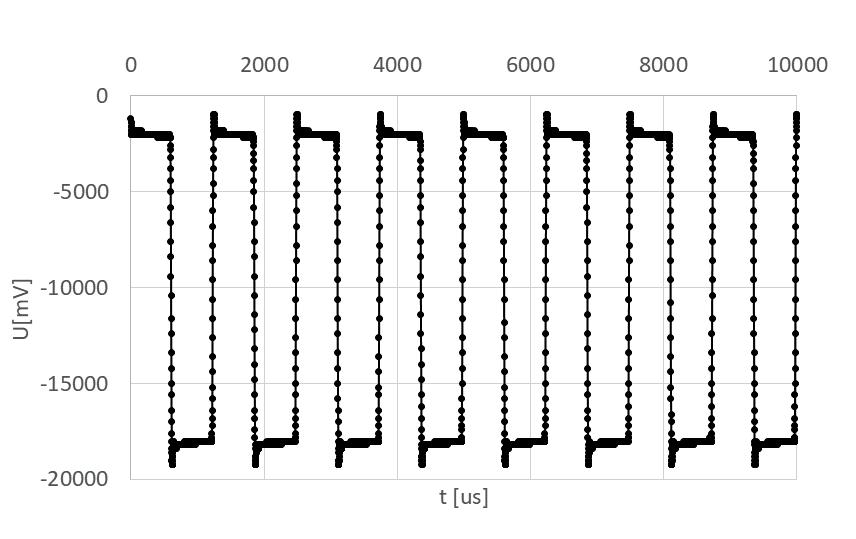
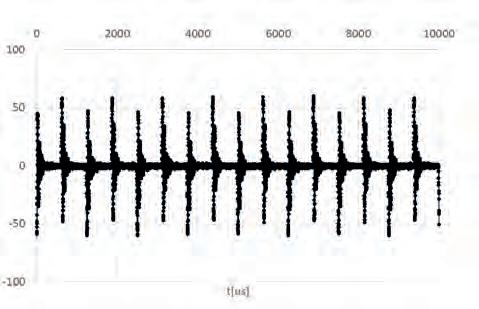
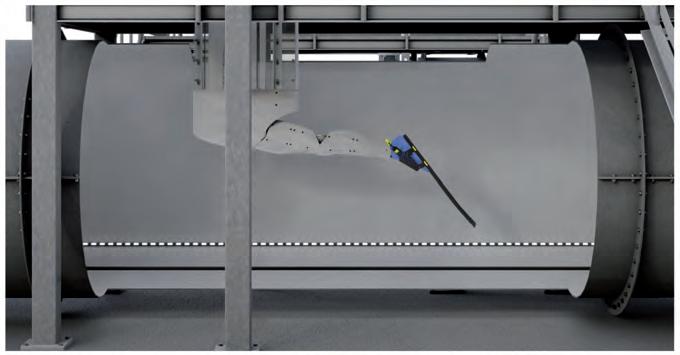
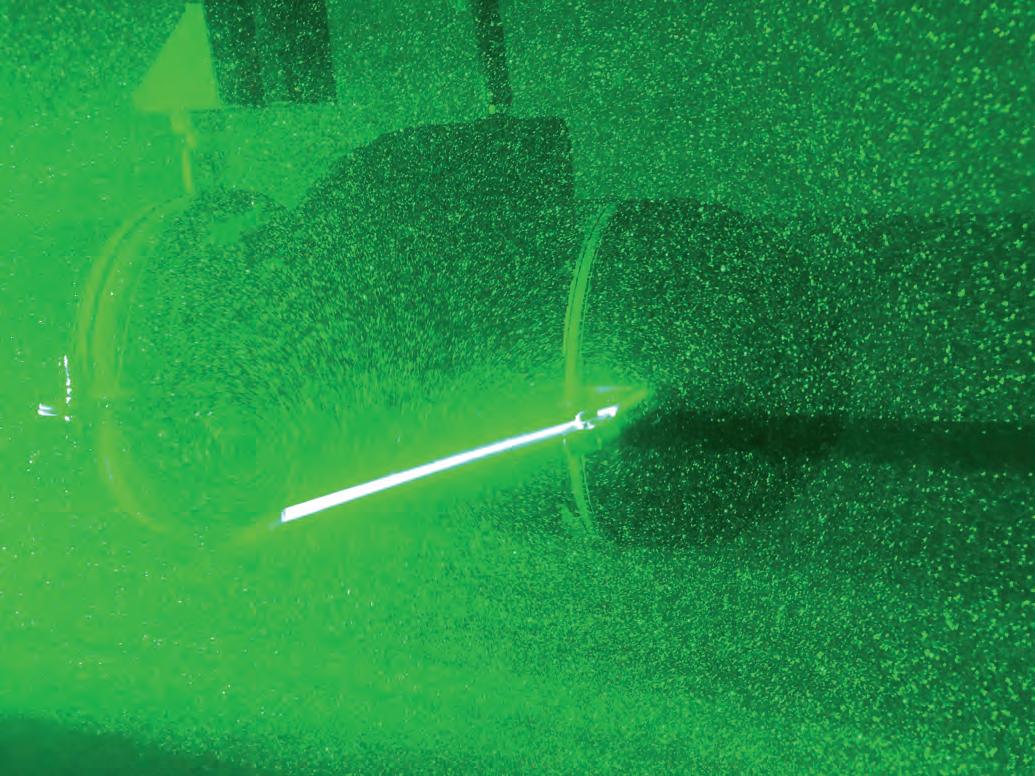
67 Jakub Tkaczyk, Maciej Tyszecki, Jacek Jabłoński, Paweł Piskur Projekt i wykonanie bezzałogowego statku powietrznego (BSP) typu oktokopter do akwizycji danych ze środowiska podwodnego sonarem Ping 360 Design and Implementation of an Octocopter-type Unmanned Aerial Vehicle (UAV) for Underwater Environmental Data Acquisition Using the Ping 360 Sonar
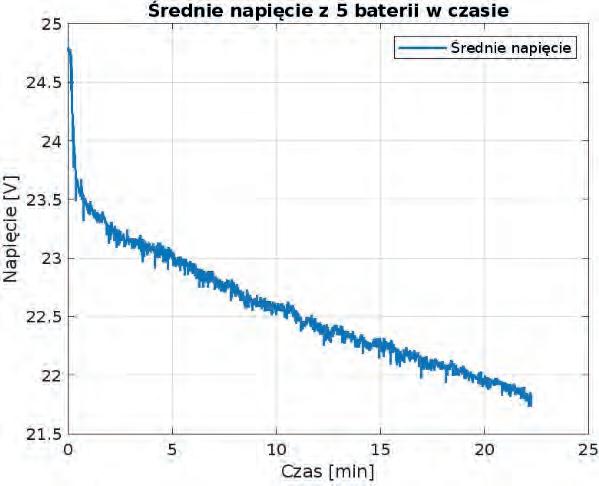
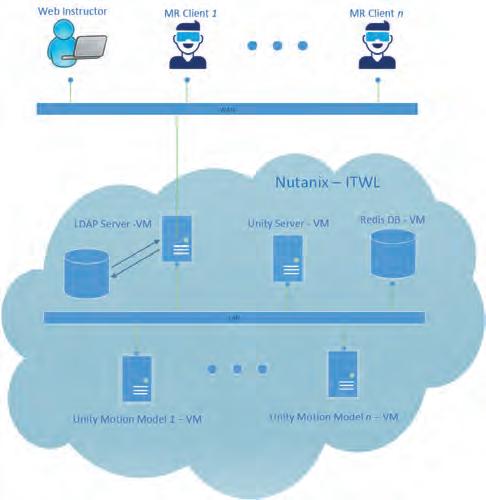
77 Piotr Golański, Michał Golański
Statystyczna ocena wydajności serwera symulatora mieszanej rzeczywistości
Statistical Assesment of Mixed-Reality Simulator Server Performance
85 Marcin Leplawy, Piotr Lipiński, Barbara Morawska, Jakub Zdanowicz-Zasidko
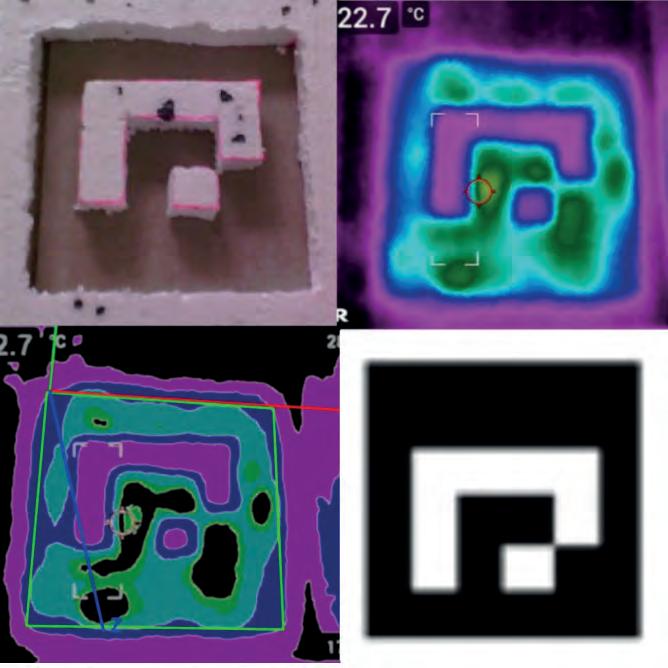
Zastosowanie kamer termowizyjnych do detekcji i śledzenia znaczników wizualnych w warunkach ograniczonej widzialności metodami sztucznej inteligencji
Application of Thermal Imaging Cameras for Visual Marker Detection and Tracking in Limited Visibility Conditions Using Artificial Intelligence Methods
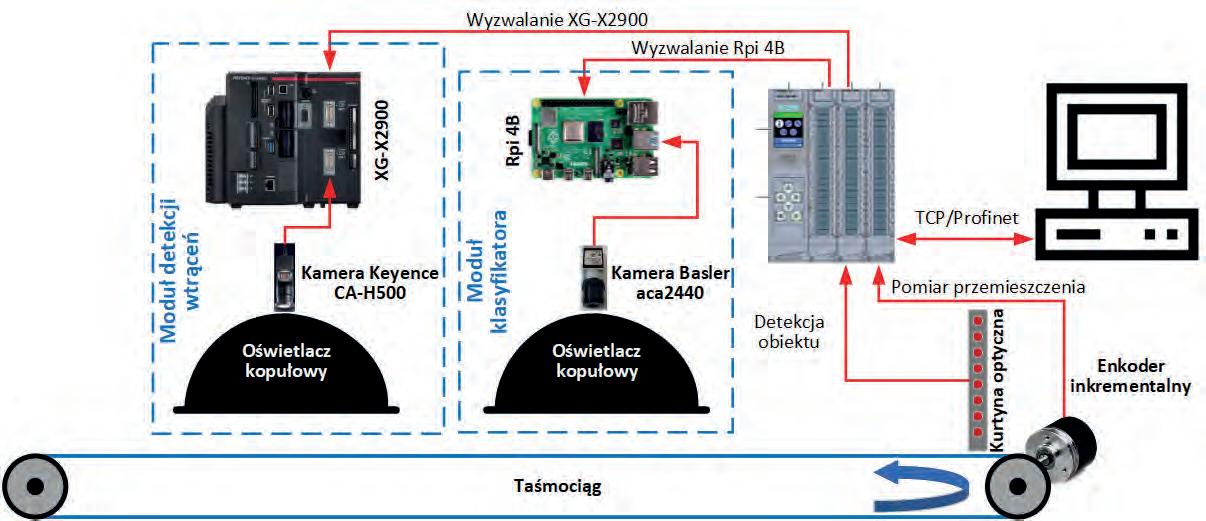
93 Paweł Rotter, Maciej Klemiato, Dawid Knapik, Maciej Rosół, Grzegorz Putynkowski
Wizyjny system do wykrywania wtrąceń w elementach z tworzywa sztucznego
wykorzystujący modele 3D
Computer Vision System for the Detection of Inclusions in Plastic Components with the Use of 3D Models
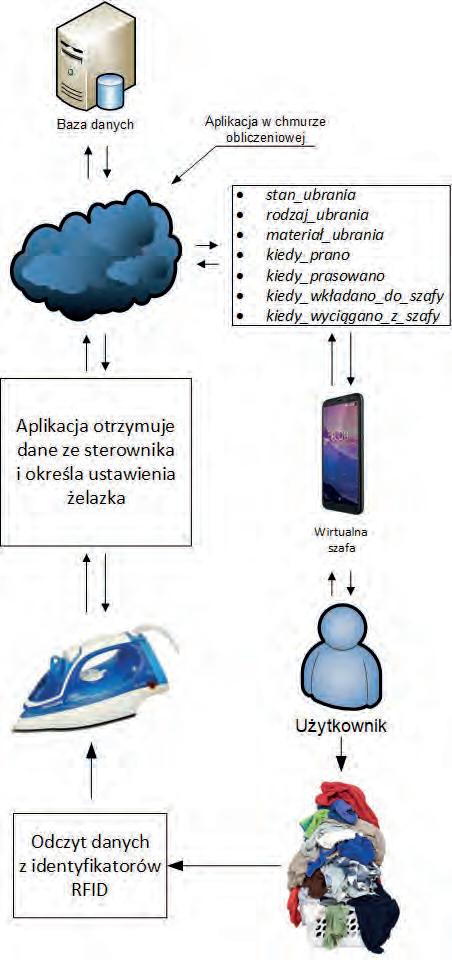
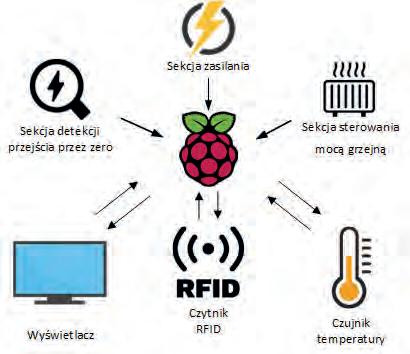
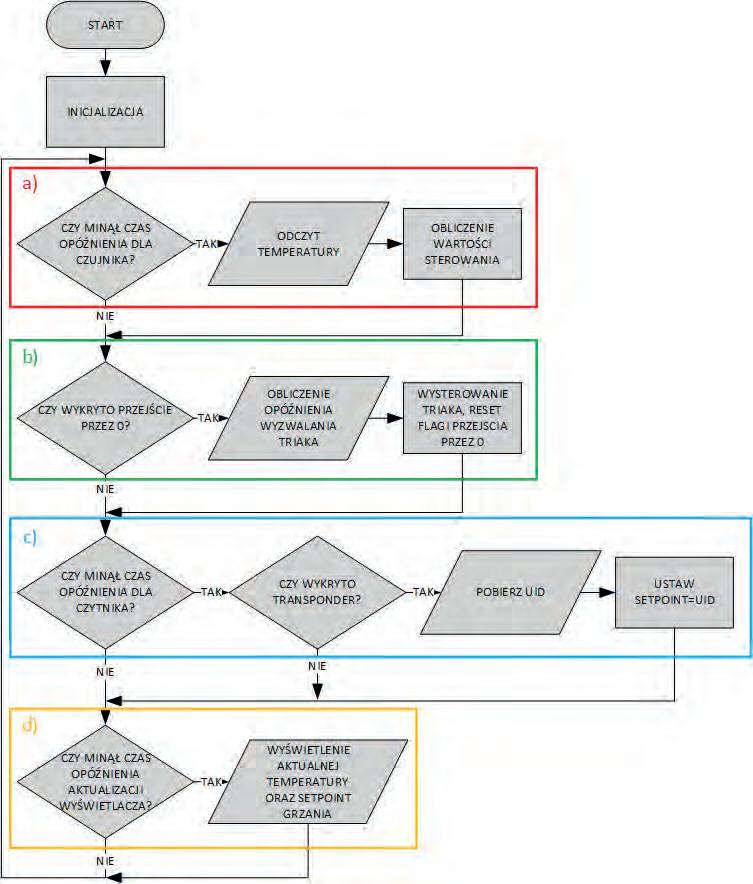
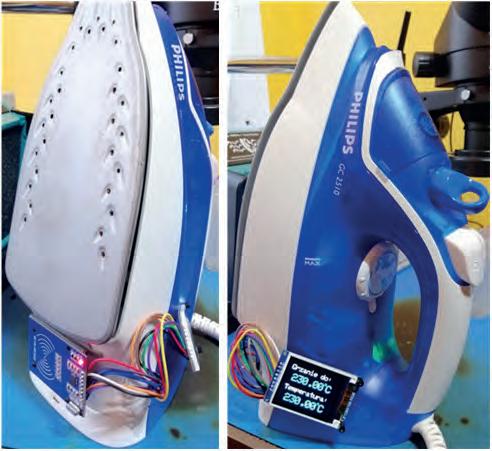
99 Bartosz Pawłowicz, Nikita Bailiuk, Paweł Wróbel, Marcin Goral System automatycznego regulowania temperatury w żelazku w oparciu o technikę
RFID
Automatic Temperature Control System in the Iron Based on RFID Technology
105 Aleksandra Kłos-Witkowska, Vasyl Martsenyuk
Destabilizacja biosensorów na podstawie zmian impulsu elektromagnetycznego i absorpcji
Destabilisation of Biosensors Based on Changes in Electromagnetic Pulse and Absorption
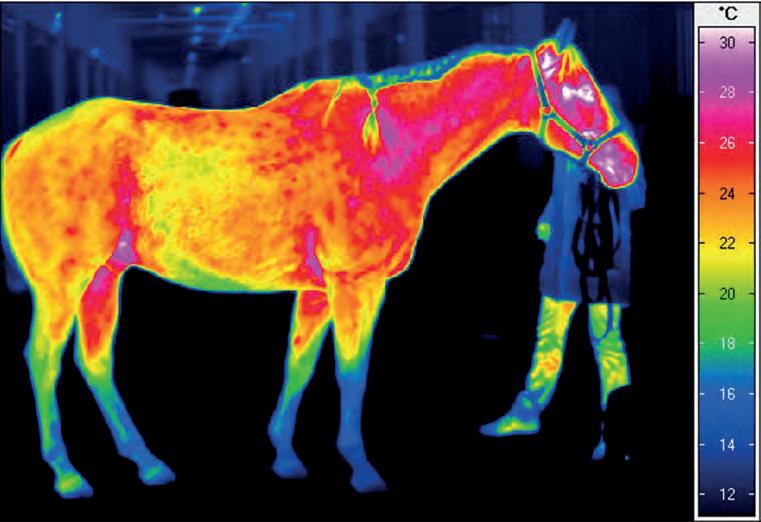
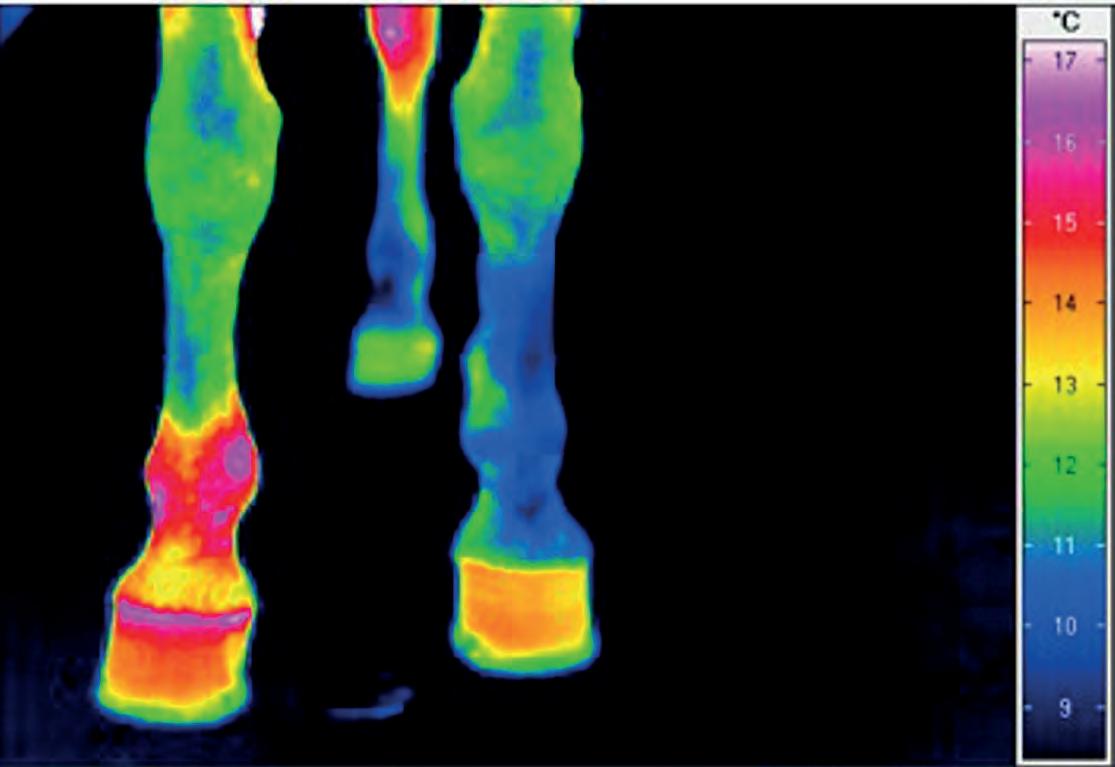
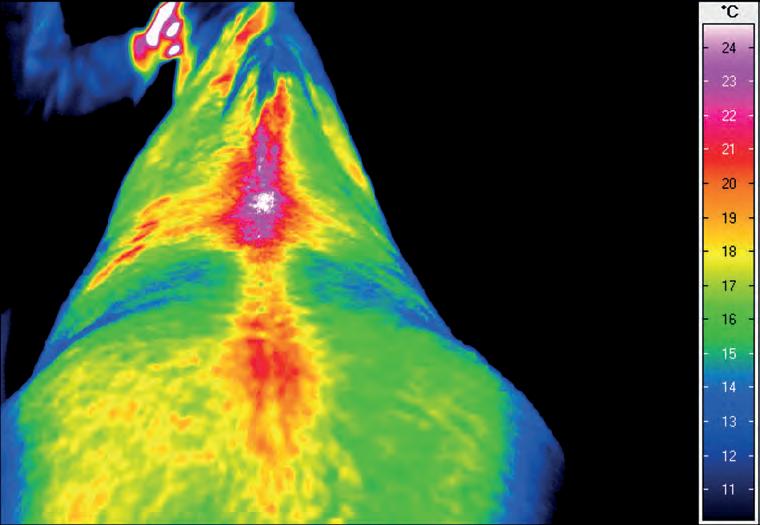
Wykorzystanie termografii w diagnostyce zabiegów fizykalnych u koni wyścigowych
The Use of Thermography in the Assessment of Physical Therapy Devices in Racehorses
119 Krzysztof Dziarski, Arkadiusz Hulewicz
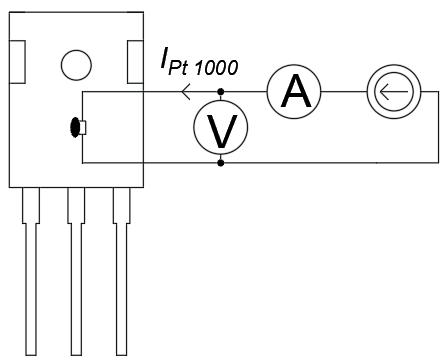
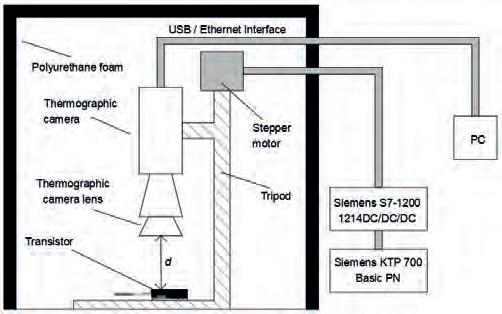
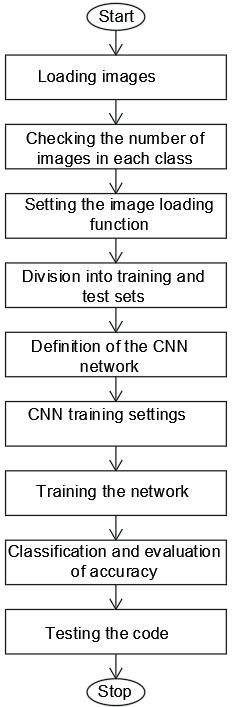
Verification of the die Temperature of a SiC Transistor Based on the Thermal Imaging and Machine Learning
Weryfikacja temperatury struktury półprzewodnikowej tranzystora SiC na podstawie obrazowania termowizyjnego i uczenia maszynowego
129 Informacje dla Autorów
133 Nasze wydawnictwa
134 Awans naukowy | Habilitacja
Badania parametrów konstrukcyjnych i sterujących jednopłetwowego napędu biomimetycznego – kmdr por. dr hab. inż. Paweł Piskur
Drodzy Czytelnicy,
przed nami najnowsze wydanie kwartalnika naukowo-technicznego. Cieszy nas, że od wielu kwartałów utrzymuje się popularność naszego pisma zarówno wśród autorów artykułów, jak i czytelników. Ten numer przynosi piętnaście artykułów, które w opinii recenzentów są godne zaprezentowania.
Większość prac poświęcona jest zagadnieniom związanym z pomiarami. Znajdziemy tu artykuły poświęcone termograficznej inspekcji temperatury pracy tranzystorów z węglika krzemu, pracujących w większych strukturach półprzewodnikowych. Na uwagę zasługuje praca poświęcona detekcji CO2 za pomocą czujników podczerwieni, gdzie skoncentrowano się na sposobie zwiększenia czułości termicznej NETD. Kamery termowizyjne są także stosowane do śledzenia i identyfikacji graficznych znaczników ArUco w warunkach ograniczonej widoczności. Termografia jest też techniką diagnostyki koni wyścigowych. Zbadano reakcje fizjologiczne tkanki koni poddanych laseroterapii, pozaustrojowej fali uderzeniowej oraz magnetoterapii. Z badań wynika, że termografia umożliwia ocenę skuteczności tych terapii. Kolejna praca zajmuje się optycznym wykrywaniem przebarwień na powierzchni obiektów wykonanych z tworzyw sztucznych na potrzeby kontroli jakości w przemyśle. Inny artykuł poświęcono eliminacji wpływu zakłóceń pochodzących od sieci zasilającej 50 Hz na pomiary sygnałów elektromiograficznych EMG. Następny problem dotyczył identyfikacji i kompensacji błędów w pomiarach dostarczanych przez żyroskopy MEMS, wchodzące w skład inercyjnych systemów nawigacji rakiet. Tę grupę zamyka artykuł poświęcony pomiarom biosensorów. Opisuje wpływ impulsu elektromagnetycznego przechodzącego przez biosensor na zmianę jego kształtu oraz absorpcję.
W zestawie artykułów poświęconych automatyce jest praca opisująca optymalizację komunikacji w czasie rzeczywistym z wykorzystaniem przemysłowego protokołu Modbus i środowiska CPDev, analizujac algorytm przeszukiwania z zakazami. W tej grupie nie zabrakło zagadnień związanych ze współczesną automatyką teoretyczną. Tym razem dyskretne regulatory PID ułamkowego rzędu opracowano uwzględniając różnice wsteczne o ułamkowym rzędzie (FOBD) oraz ciągłe rozwinięcia ułamkowe (CFE). Pierwsza metoda jest wolniejsza, ale dokładniejsza. W kolejnym artykule przedstawiono konstrukcję układu regulacji temperatury żelazka z użyciem czujników RFID wszytych w tkaniny, co dotyczy sfery praktyki.
Wśród artykułów poświęconych robotyce znajduje się praca dotycząca bezzałogowego statku powietrznego wyposażonego w pływaki i sonar. Dzięki temu dron może również wykrywać obiekty znajdujące się pod wodą. Dalej mamy kolejny już artykuł poświęcony hiper-redundantnemu manipulatorowi Arm-Z, zbudowanego przez połączenie modułów wyposażonych w jedno złącze obrotowe.
Pracą z pogranicza informatyki, automatyki i robotyki jest artykuł poświęcony budowie symulatora helikoptera Mi-17, a konkretnie wydajnej komunikacji między symulatorem rozproszonym pracującym w chmurze a komputerami, które są obsługiwane przez osoby szkolące się. Do tej interdyscyplinarnej grupy zalicza się praca poświęcona analizie bezpieczeństwa systemów cyberfizycznych, w której analizowane są ataki adwersarzy, a także degradacja zabezpieczających urządzeń elektronicznych. Mamy nadzieję, że wybór artykułów opublikowanych w bieżącym wydaniu kwartalnika zainteresuje Czytelników. Życzymy przyjemnej lektury.
Redaktor naczelny kwartalnika Pomiary Automatyka Robotyka prof. dr hab. inż. Cezary Zieliński
Numerical Analysis of the Discrete, Fractional Order PID Controller using FOBD and CFE Approximations
Krzysztof Oprzędkiewicz
AGH University, Faculty of Electrical Engineering, Automatic Control, Informatics and Biomedical Engineering, al. A. Mickiewicza 30, 30-059 Krakow, Poland
Abstract: This paper presents the numerical analysis of the discrete, approximated Fractional Order PID Controller (FOPID). The fractional parts of the controller are approximated with the use of the most known methods: Fractional Order Backward Difference (FOBD) and Continuous Fraction Expansion (CFE). CFE is simpler and faster than the FOBD method, but its accuracy is not always satisfying. For both approximations optimum sample time was found by minimizing of the cost function Integral Absolute Error (IAE). Additionally, to optimize of CFE its parameter a was applied. Results of numerical tests show that the FOPID using FOBD is more accurate in the sense of IAE cost function for FOPI and FOPID controllers, but CFE is more accurate for FOPD controller. Next, the FOBD requires to use of smaller sample time to obtain of good accuracy than CFE. This allows to conclude that FOPD controller using CFE can be applied in time critical applications at bounded platforms, for example in robotics or numerical control.
One of main areas of application fractional order calculus in automation is a FOPID control. Results presented by many Authors, e.g. [2, 4, 14, 15], show that FOPID controller is able to assure better control performance than its integer order PID analogue.
Autor korespondujący: Krzysztof Oprzędkiewicz, kop@agh.edu.pl
Artykuł recenzowany nadesłany 01.11.2024 r., przyjęty do druku 18.08.2025 r.
Each digital implementation of FOPID controller (PLC, microcontroller) requires to apply integer order, finite dimensional, discrete approximant. The most known are: FOBD and CFE approximations (see e.g. [1]). They allow to estimate a non-integer order element with the use of a digital filter. The detailed comparison of both methods was done e.g. in [8]. The use of these methods in the FOPID controller were also considered in the paper [12], the FOPID employing FOBD is analysed with details in the paper [10].
For elementary fractional-order integrator/differentiator an analytical formula of the step response is known (see e.g. [4]). Consequently the analytical step response of a FOPID controller can be given too. It is applied as the reference to estimate of an accuracy of an approximation.
This paper compares the accuracy and numerical complexity of the discrete implementations of the FOPID controller employing the FOBD and CFE approximations. Such a comparison has not been done yet. The approach used in this paper has been proposed in the paper [9]. Recent results can be useful during implementation of FOPID at bounded digital platform.
The paper is organized as follows. Preliminaries draw theoretical background to presenting of main results. It covers basic ideas from fractional calculus as well as the FOPID controller and its discrete form written with the use of both considered approximations.
The numerical analysis covers founding of sample time assuring the best accuracy of approximation and estimating of numerical complexity of both approximations. All versions of controller: FOPID, FOPI and FOPD were examined in the sense accuracy and numerical complexity.
2. Preliminaries
2.1. Elementary ideas
Elementary ideas from fractional calculus can be found in many books, for example [5, 6, 14, 16]. Here only some definitions necessary to explain of main results are recalled.
Firstly the fractional-order, integro-differential operator is given (see e.g. [5, 7, 16]):
Definition 1. (The elementary fractional order operator) The fractional-order integro-differential operator is defined as follows:
Definition 6. (The Laplace transform of the Caputo operator)
where a and t denote time limits for operator calculation, α ∈ denotes the non-integer order of the operation.
Next remember an idea of Gamma Euler function [7]:
Definition 2. (The Gamma function)
Furthermore recall an idea of Mittag-Leffler functions. The two parameter Mittag-Leffler function is defined as follows:
Definition 3. (The two parameter Mittag-Leffler function)
Definition 7. (The Grünwald-Letnikov definition of the FO operator) (7)
In (7) is the binomial coefficient:
For β = 1 we obtain the one parameter Mittag-Leffler function:
Definition 4. (The one parameter Mittag-Leffler function)
2.2. The FOPID controller
The FOPID controller is described by the following transfer function (see e.g. [4], p. 33):
The fractional-order, integro-differential operator (1) can be described by many definitions. The “classic” have been proposed by Grünwald and Letnikov (GL Definition), Riemann and Liouville (RL Definition) and Caputo (C Definition). In this paper C and GL definition will be employed. They are recalled beneath [4, 13].
Definition 5. (The Caputo definition of the FO operator)
where , αβ ∈ are fractional orders of the integration and derivative actions and kP, kI and kD are the coefficients of the proportional, integral and derivative actions respectively.
The analytical formula of the step response of the controller (9) takes the following form (see [11]):
where n − 1 < α < denotes the non-integer order of operation and Γ(..) is the complete Gamma function expressed by (2).
For the Caputo operator the Laplace transform can be defined (see for example [6]):
where Γ(..) is the complete Gamma function (2). This analytical formula will be used as the reference to estimate of the accuracy of the approximation.
2.3. The FOBD approximation
The GL definition is limit case for h → 0 of the Fractional Order Backward Difference (FOBD), commonly employed in discrete FO calculations (see e.g. [14], p. 68):
Definition 8. (The Fractional Order Backward Difference-FOBD) (11)
Denote coefficients by () : dl α (12)
The coefficients (12) are functions of order α. They can be also calculated with the use of the following, equivalent recursive formula (see e.g. [4], p. 12 ), useful in numerical calculations:
It is proven in [3] that:
From (13) and (14) we obtain at once that:
In (11) L denotes a memory length necessary to correct approximation of a non-integer order operator. Unfortunately good accuracy of approximation requires to use a long memory L what can make difficulties during implementation.
The approximator FOBD (11) can be described by the G(z−1) transfer function in the form of the FIR filter containing only zeros:
at the Al-Alaoui-based approximation, which is a linear combination of the Euler and Tustin approximants.
It is important to note that coefficient a can be also employed as an additional parameter allowing to fit the approximation to analytical results, e.g. to obtain accurate approximation of FOPID. This idea will be presented in next sections.
Numerical values of coefficients w l and vl and various values of the parameter a can be calculated with use of the MATLAB function dfod1. If the Tustin approximation is considered (a = 1) then CFED(z−1 , α ) = CFEN(z−1 ,− α ) and the polynomial CFED(z−1 , α) can be given in the direct form [18]. Examples of the polynomial CFED(z−1 , α) for L = 1, 3, 5 are given in Table 1. The detailed analysis of various forms of CFE approximators has been presented by [17].
2.5. The discrete FOPID using FOBD and CFE approximations
The discrete implementation of the controller (9) using approximator (16) is as beneath:
where () dl α are expressed by (12) or equivalently by (13), h is the sample time and α is the fractional order. The transfer function (16) is typically applied to approximate of the fractional operator (1).
2.4. The CFE approximation
The CFE approximator allows to express the elementary FO operator s α in the form of an IIR filter containing both poles and zeros. It is faster convergent and easier to implement due to its relatively low order. It is obtained via discretization of elementary fractional order element s α This can be done using so called generating function 1 ().sz ω ≈ The new operator raised to the power α has the following form [18, 15]:
The step response of the approximated controller (19) takes the following form:
In (17) L is the order of approximation, gh is the coefficient depending on sample time and type of approximation:
The formula (20) can be computed numerically with the use of step function from MATLAB. It is the function of a time and memory length L. The memory length determines also the accuracy of the implementation. The accuracy and numerical complexity as a function of L were analyzed with details in the paper [10].
Tab. 1. Coeffcients of polynomials CFEN D (z−1 , α) for Tustin approximation Tab. 1. Współczynniki wielomianów CFEN,D (
, α) dla aproksymacji Tustina
Order L w l vl
In (18) h is the sample time and a is the coefficient depending on approximation type. For a = 0 and a = 1 we obtain the Euler and Tustin approximations respectively. For (0,1) a ∈ we arrive
Next, the application of (17) to (9) yields:
The step response of the discrete controller is as follows:
The accuracy of both approximations will be tested using known IAE cost function, calculated at the discrete time grid and for finite time interval.
For the FOBD approximation the cost function is a function of sample time h and memory length L (see [10]). In this paper the minimum memory length equal L = 100 will be used and the approximation will be optimized with the use of sample time h only.
Tab. 2. Approximation FOBD: optimum values of sample time h for various fractional orders of the controller
Tab. 2. Tab. 2. Aproksymacja FOBD: optymalne wartości okresu próbkowania h dla różnych rzędów regulatora
α β h IAE 1 –0.250.250.07580.0441 2 –0.500.500.06850.1543
For the CFE approximation it is a function of sample time h and parameter a, because the length of approximation should be used maximum permitted M = 5:
where k = 1, ..., Kf are the discrete time instants, h is the sample time. Consequently the final time of computing is equal:
thK = (25)
Error e(k) describes the difference between analytical and approximated step responses (10) vs (20), (22) in the same time moment k:
3. Numerical tests
The general methodology of numerical tests is close to approach proposed in the paper [9]. A new idea is the looking for the sample time h assuring the best accuracy of approximation for fixed, short memory length. For CFE approximation additionally its optimum parameter a is estimated too. This is done by minimization of the cost function (23) as a function of h and cost function (24) as a function of h and a
3.1. Accuracy
Firstly the approximation using FOBD for L = 100 and various versions of FOPID and fractional orders was tested. Calculations were executed at the MATLAB platform using the function step to compute of the step response and function fminbnd to find optimum value of the sample time h. Results are given in the table 2. Rows 1–4 describe the FOPID controller, rows 5–8 illustrate the FOPI controller and rows 9–12 the FOPD controller respectively.
Next the FOPID using CFE was optimized. The values of parameter a and sample time h optimum in the sense of cost function (24) were tested for various orders of FOPID. Calculations were executed at the MATLAB platform using the function
Tab. 3. Approximation CFE: optimum values of parameter a and sample time h for various fractional orders of controller Tab. 3. Tab. 3. Aproksymacja CFE: optymalne wartości parametru a oraz okresu próbkowania h dla różnych rzędów ułamkowych regulatora No. α β a h IAE 1 –0.250.250.05050.21740.0888
–0.250.000.00170.24390.1757
–0.500.000.03610.20830.4271
–0.750.000.11700.17240.6862
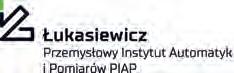
Fig. 1. The step responses ya (t) vs yFOBD (kh) and yCFE (kh) for experiment No 2 (controller FOPID)
Rys. 1. Odpowiedzi skokowe ya(t) vs yFOBD (kh) i yCFE(kh) dla eksperymentu nr 2 (regulator FOPID)
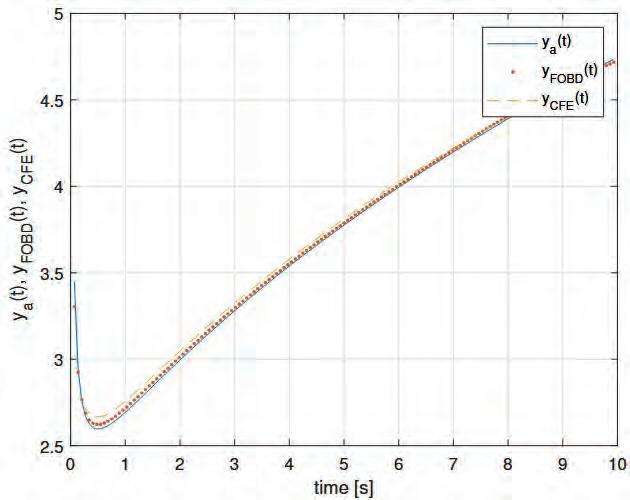
Fig. 2. The step responses ya (t) vs yFOBD (kh) and yCFE (kh) for experiment No 6 (controller FOPID)
Rys. 2. Odpowiedzi skokowe ya(t) vs yFOBD (kh) i yCFE(kh) dla eksperymentu nr 6 (regulator FOPID)
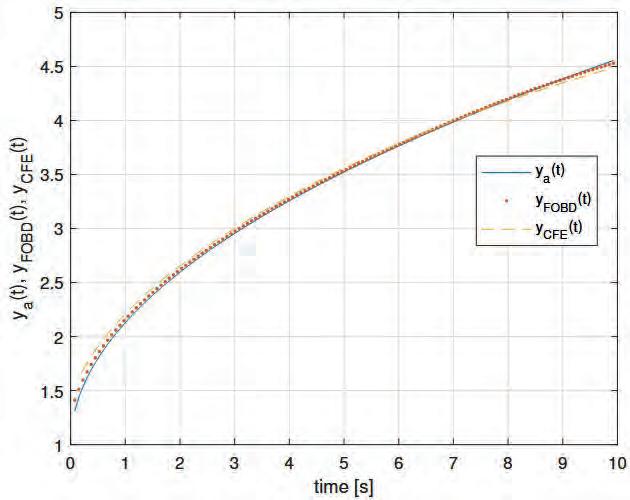
Fig. 3. The step responses ya (t) vs yFOBD (kh) and yCFE (kh) for experiment No 10 (controller FOPID)
Rys. 3. Odpowiedzi skokowe ya(t) vs yFOBD (kh) i yCFE(kh) dla eksperymentu nr 10 (regulator FOPID)
step to compute of the step response and function fminsearch to found optimum values of parameters. In all tests the values of parameters kP, kI and kD were equal 1.0. Results are collected in the table 3. Rows 1–4 describe the FOPID controller, rows 5–8 illustrate the FOPI controller and rows 9–12 the FOPD controller respectively.
The approximated step responses from experiments No. 2 (FOPID), 6 (FOPI) and 10 (FOPD) are compared to the analytical one in Figures 1–3.
Comparison of step responses analytical vs approximated for experiments No. 2 (FOPID), 6 (FOPI) and 10 (FOPD) is illustrated by Figures 1–3.
The analysis of the tables 2 and 3 allows to conclude that the FOBD gives more accurate approximation for FOPID and FOPI controllers, but for FOPD controller the use of CFE assures better accuracy.
In addition, the good accuracy of the FOPID employing the FOBD requires to apply of shorter sample time, than CFE.
3.2. The numerical complexity
Next the numerical complexity was examined. Tests consist in measuring of duration of computation of the step response for
Tab. 4. The parameters of computers used to experiments Tab. 4. Parametry komputerów użytych do eksperymentów
Computer No. 1
Parameter
Processor Intel(R) Core(TM) i5-8600K CPU@3.60 GHz
RAM 16 GB
OS Windows 10 Pro
MATLAB R2016b
Computer No. 2
Parameter
Processor Intel(R) Core(TM) i7-10700 CPU@2.90 GHz
RAM 16 GB
OS Windows 11 Pro
MATLAB R2020b
each approximation 1000 times. Step responses were calculated using MATLAB function step, their duration TFOBD,CFE was measured with the use of MATLAB functions tic and toc. Tests were done at two PC computers and using various versions of MATLAB. Parameters of the computers used to experiments are given in the Table 4. Experiments were done for parameters sets No. 2, 6 and 10 from Tables 2 and 3. The mean values of TFOBD, TCFE and standard deviations , FOBDσ CFEσ obtained from each test are collected in the Table 5. Results presented in the Table 5 show that the calculations executed at the 7 core computer are a little bit faster than at 5 core computer for FOBD approximation only. For CFE this difference is negligible. This is caused by the fact that the order of the CFE model is significantly lower that order of the FOBD model.
Next, the duration of calculations does not depend on the version of controller – the “full” version with integration and derivation is computed in the same time as “reduced” versions FOPI and FOPD. This is caused by the fact that the order of approximation is the same for each version.
Tab. 5. Mean values and standard deviations of duration TFOBD and TCFE in seconds from both computers
Tab. 5. Wartości średnie i odchylenia standardowe czasów obliczeń TFOBD i TCFE dla obu komputerów
The main final conclusion from this paper is that the selection of approximation FOBD vs CFE should be always carefully considered with respect to accuracy and numerical complexity. For time critical applications using FOPD control at bounded platform the use of CFE seems to be better selection.
The spectrum of further investigations covers e.g. experimental verification of results at industrial digital control platforms: PLC, microcontroller or robot controller.
Acknowledgments
This paper was sponsored by AGH University of Science and Technology project No. 16.16.120.773.
References
1. Al-Alaoui M.A., Novel digital integrator and differentiator, “Electronics Letters”, Vol. 29, No. 4, 1993, 376–378, DOI: 10.1049/el:19930253.
2. Vinagre B.M., Po dlubny I., Hernandez A., Feliu V., Some approximations of fractional order operators used in control theory and applications, “Fractional Calculus and Applied Analysis”, Vol. 3, No. 3, 2000, 231–248.
3. Busłowicz M., Kaczorek T., Simple conditions for practical stability of positive fractional discrete-time linear systems, “International Journal of Applied Mathematics and Computer Science”, Vol. 19, No. 2, 2009, 263–269, DOI: 10.2478/v10006-009-0022-6.
4. Caponetto R., Dongola G., Fortuna L., Petras I., Fractional order systems: Modeling and Control Applications, 2010, DOI: 10.1142/7709.
5. Das S., Functional Fractional Calculus for System Identification and Control, Springer, Berlin 2010.
6. Kaczorek T., Selected Problems of Fractional Systems Theory, Springer, Berlin 2011.
7. Kaczorek T., Rogowski K., Fractional Linear Systems and Electrical Circuits. Bialystok University of Technology, Bialystok, 2014.
8. Dorcak L., Petráš I., Terpak J., Zbrojovan M., Comparison of the methods for discrete approximation of the fractional-order operator. Proceedings of the ICCC’2003 confer-
ence, May 26-29, High Tatras, Slovak Republic, 2003, 851–856.
9. Oprzędkiewicz K., Numerical properties of discrete approximations of an elementary fractional order transfer function, “Przegląd Elektrotechniczny”, R. 99, Nr 7, 2023, 117–123, DOI: 10.15199/48.2023.07.22.
10. Oprzędkiewicz K., Numerical analysis of the discrete, fractional order PID controller using FOBD approximation, “Pomiary Automatyka Robotyka”, R. 28, Nr 3, 2024, 17–122, DOI: 10.14313/PAR_253/117.
11. Oprzędkiewicz K., Accuracy estimation of digital fractional order PID controller, [In:] Theory and applications of non-integer order systems, Lecture Notes in Electrical Engineering, Vol. 407, 2017, 265–275, DOI: 10.1007/978-3-319-45474-0_24.
12. Oprzędkiewicz K., Gawin E., A non-integer order, state space model for one dimensional heat transfer process, “Archives of Control Sciences”, Vol. 26, No. 2, 2016, 261–275, DOI: 10.1515/acsc-2016-0015.
13. Ostalczyk P., Equivalent descriptions of a discrete-time fractional-order linear system and its stability domains, “International Journal of Applied Mathematics and Computer Science”, Vol. 22, No. 3, 2012, 533–538, DOI: 10.2478/v10006-012-0040-7.
14. Ostalczyk P., Discrete Fractional Calculus. Applications in Control and Image Processing, World Scientific, New Jersey, London, Singapore, 2016.
15. Petráš I., Fractional-order feedback control of a DC motor, “Journal of Electrical Engineering”, Vol. 60, No. 3, 2009, 117–128.
16. Po dlubny I., Fractional Differential Equations, Academic Press, San Diego, 1999.
17. Stanisławski R., Latawiec K., Łukaniszyn M., A Comparative Analysis of Laguerre-Based Approximators to the Grünwald-Letnikov Fractional-Order Difference, “Mathematical Problems in Engineering”, 2015, DOI: 10.1155/2015/512104.
18. Chen Y.Q., Moore K.L., Discretization schemes for fractional-order differentiators and integrators, “IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications”, Vol. 49, No. 3, 2002, 363–367, DOI: 10.1109/81.989172.
Streszczenie: W pracy zaprezentowano analizę numeryczną dyskretnego regulatora PID niecałkowitego rzędu, w którym akcje: całkująca i różniczkująca są aproksymowane z użyciem dwóch typowych aproksymacji dyskretnych: FOBD i CFE. CFE jest szybsza i prostsza, natomiast nie zawsze zapewnia wystarczającą dokładność. Dla obu badanych aproksymacji wyznaczono okres próbkowania zapewniający uch najlepszą dokładność w sensie funkcji kosztu IAE. W przypadku aproksymacji CFE w optymalizacji wykorzystano dodatkowo współczynnik a. Wyniki testów numerycznych wskazują, że zastosowanie aproksymacji FOBD zapewnia lepszą dokładność dla regulatorów FOPID i FOPI, natomiast dla regulatora FOPD lepszą opcją jest zastosowanie CFE. Regulator FOBD dla zapewnienia dobrej dokładności wymaga stosowania krótszego okresu próbkowania, niż CFE. Podsumowując, w krytycznych czasowo aplikacjach pracujących na sprzęcie o ograniczonej mocy obliczeniowej (np. robotyka, sterowanie numeryczne lub urządzenia IoT) można rekomendować zastosowanie regulatora FOPD wykorzystującego aproksymację CFE.
Słowa kluczowe: regulator FOPID, aproksymacja CFE, aproksymacja FOBD, dokładność, wskaźnik jakości IAE, złożoność numeryczna
Prof. Krzysztof Oprzędkiewicz, PhD DSc kop@agh.edu.pl
ORCID: 0000-0002-8162-0011
He was born in Krakow in 1964. He obtained MSc in electronics in 1988, PhD and DSc in Automatics and Robotics in 1995 and 2009 at AGH University of Science and Technology (Krakow, Poland). He has been working at AGH University in Department of Automatics since 1988, recently as a professor. In 2012–2016 he was a deputy dean of faculty of Electrotechnics, Automatics, Informatics and Biomedical Engineering at AGH University. Recently he is the head of the Department of Automatic Control and Robotlics at AGH University. Since 2020 he is also a member of Committee on Automatic Control and Robotics of the Polish Academy of Sciences. His research covers infinite dimensional systems, fractional order modeling and control, uncertain parameter systems, industrial automation, PLC and SCADA systems.
Rejection of Power-Line Interference in EMG Signals Using a Notch Filter Initialized with Non-Zero States
Michal Tyrpa
Student West Pomeranian University of Technology, Szczecin, Poland
Jacek
Piskorowski
West Pomeranian University of Technology, Department of Systems, Signals and Electronics Engineering, Szczecin, Poland
Abstract: This paper presents an improved method for rapid suppression of power-line interference (50 Hz) from electromyographic (EMG) signals. The proposed technique utilizes a digital notch filter initialized with carefully chosen non-zero initial conditions, combined with timevarying pole radius r(n) of the filter. Unlike classical solutions, which typically suffer from prolonged transient artifacts due to zero initialization and fixed filter parameters, the proposed approach achieves immediate interference attenuation by pre-setting the filter states as if the interference were already in steady-state. The performance of this approach was quantitatively assessed through experimental comparisons with a conventional fixed-radius notch filter and an adaptive LMS-based filter. Results demonstrate superior transient suppression, exhibiting lower mean square error (MSE) and minimal distortion of the useful EMG signal components. The proposed solution is particularly beneficial for biomedical signal processing applications where rapid settling and minimal signal distortion are critical, such as myoelectric prostheses and neurorehabilitation devices.
Electromyographic (EMG) signals are commonly affected by various disturbances, including strong power-line interference at 50 Hz (or 60 Hz in other regions) [1]. Such interference significantly complicates the analysis and interpretation of EMG signals, making efficient suppression methods essential in biomedical signal processing applications, particularly those requiring real-time signal acquisition and analysis [2]. The standard solution for this issue typically involves using narrow-band digital notch filters designed precisely at the interfering frequency. However, a classical high-quality-factor notch filter, initialized with zero initial conditions, inherently exhibits prolonged transient behavior at the onset of filtering [2, 3]. These prolonged transient artifacts can distort the initial segment of the recorded EMG data, potentially causing loss of clinically relevant information. In addition to synthetic signal evaluation, validation of the proposed filtering method was performed using real electromyographic (EMG) signals obtained from the publicly available PhysioNet database, ensuring
Autor korespondujący:
Michał Tyrpa, michaltyrpa@op.pl
Artykuł recenzowany nadesłany 13.05.2025 r., przyjęty do druku 03.07.2025 r.
realistic assessment of filter performance under practical biomedical conditions [11].
Several methods have been proposed in the literature to overcome these limitations. Adaptive interference cancellation methods, for instance, have been employed extensively [9, 10]; nevertheless, these require additional reference signals and may perform suboptimally under rapidly changing interference conditions. Another category of approaches involves adjusting the parameters of the notch filter dynamically, aiming to reduce transient duration without significantly compromising the filter’s frequency selectivity [3, 5]. Additionally, methods employing notch filters with non-zero initial conditions have been reported, mainly for electrocardiographic (ECG) signal processing, achieving promising results by immediately suppressing power-line interference from the initial samples [4].
This paper presents an improved solution specifically tailored for EMG signals, uniquely combining two previously explored approaches. The proposed technique employs a digital notch filter initialized with carefully selected non-zero states, calculated based on steady-state assumptions of the interfering sinusoid. Furthermore, the approach incorporates a time-varying pole radius, which smoothly increases from an initially lower value toward unity, enabling faster transient response while maintaining filter stability and selectivity. The distinctiveness of this method lies in the simultaneous use of Non-Zero initial conditions and time-varying filter parameters, which significantly enhance transient suppression performance beyond what has previously been reported for EMG signals.
The performance of the proposed filtering strategy is validated through quantitative comparisons against a conventional notch filter (with zero initial conditions and fixed parameters) and an
adaptive LMS-based interference canceller. Experimental results confirm the superiority of our approach, demonstrating notably reduced mean square error (MSE), shorter transient durations, and minimal distortion of the useful EMG components. Consequently, the method presented herein is especially suitable for real-time biomedical applications such as myoelectric prostheses, rehabilitation monitoring systems, and neuromuscular diagnostics, where both rapid convergence and signal fidelity are critical [1, 2].
2. Methods of Filtering EMG Signals
Electromyographic (EMG) signals typically suffer from various interferences, particularly power-line interference (PLI) at 50 Hz (or 60 Hz depending on geographic region), severely impairing signal interpretability and clinical usefulness [1, 2].
Several approaches have been employed to reduce or remove this interference, including classical filtering methods (digital FIR and IIR filters), adaptive filtering, spectral subtraction, and more advanced signal processing techniques, such as wavelet transforms and empirical mode decomposition [2, 9].
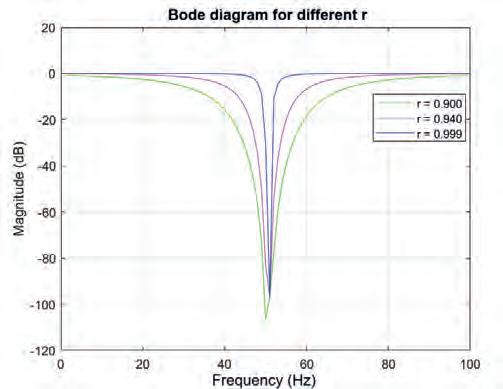
Conventional digital notch filters are among the most widely utilized due to their computational simplicity and efficient suppression of narrowband interferences. A standard second-order IIR notch filter is typically described by the following transfer function:
where r0 is the initial pole radius value, dr defines the total change in radius, and α determines the rate of convergence. Figure 1 illustrates an example of the time-varying pole radius trajectory used in the proposed method.
The filter parameters (r0, dr, α ) were optimized through a systematic grid-search procedure. Specifically, the initial pole radius r0 was varied from 0.85 to 0.99 in increments of 0.01, the adaptation depth d r was explored from 0.001 to 0.2 using logarithmic increments, and the adaptation rate α ranged from 0.001 to 0.1 also in logarithmic increments. Optimal parameters were selected by minimizing the mean square error (MSE) between filtered and original clean EMG signals.
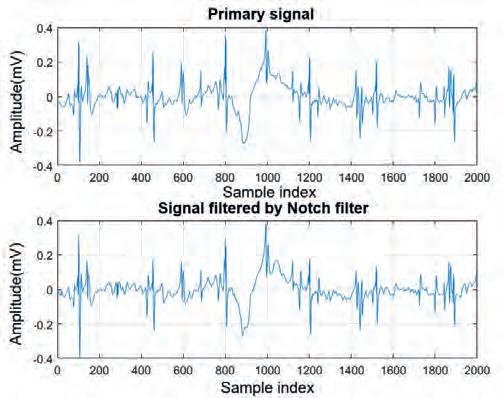
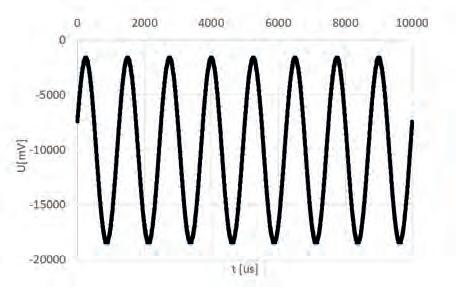
The effect of the proposed filtering method, incorporating both non-zero initial states, is illustrated in Fig. 2. In this approach, the EMG signal passes through the proposed notch filter, which significantly improves transient suppression and enhances overall signal quality, particularly at the beginning of the filtering process.
For comprehensive interference removal, especially addressing lower-frequency motion artifacts, the proposed notch filter is complemented with an additional high-pass filter (cut-off frequency at 20 Hz). This combined filtering solution ensures thorough suppression of power-line interference and low-frequency artifacts without compromising the relevant EMG frequency components.
where 00 2 ffs ωπ = represents the normalized interference frequency (f0 is the interference frequency, and fs is the sampling rate), and r is the pole radius, directly determining the filter’s selectivity and transient duration [3, 4].
Despite their popularity, traditional notch filters initialized with zero states often exhibit prolonged transient responses, significantly distorting the initial portions of EMG signals. To overcome this critical limitation, we propose initializing the notch filter with carefully computed non-zero initial states. These initial states are analytically derived assuming a steady-state sinusoidal interference:
(1)sin(),xA−=−φω (2)
(2)sin(2),xA−=−φω (3)
Experimental validation (presented in the subsequent section) quantitatively demonstrates that this combined time-varying strategy significantly outperforms conventional methods, offering rapid transient suppression, superior signal quality, and minimal distortion of clinically valuable EMG signals.
3. Experimental Results
In this section, the effectiveness of the proposed notch filter with non-zero initial conditions was evaluated through a series of carefully designed experiments. The filtering performance was quantitatively compared against two standard reference methods: a conventional notch filter with zero initial conditions and fixed pole radius, and an adaptive LMS interference canceller [9, 10].
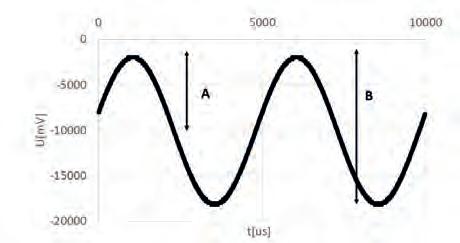
To perform the tests, synthetic EMG signals contaminated with known power-line interference (50 Hz) were used, as described in detail in our previous work [1, 2]. In the test signals, an artificial 50 Hz sinusoidal component was added with an amplitude equal to 50 % of the EMG signal’s peak amplitude, corresponding to a signal-to-noise ratio (SNR) of approximately 3 dB. This represents a relatively strong interference scenario. The results demonstrate that even under such conditions, the proposed filter effectively and almost immediately suppresses the 50 Hz artifacts while preserving the useful content of the EMG signal.
where A and ϕ represent the amplitude and phase of the interfering signal, respectively. Setting these conditions significantly reduces transient artifacts right from the initialization of the filter, ensuring immediate interference suppression.
Additionally, the proposed notch filter employs a time-varying pole radius r(n), which initially starts from a relatively low value (around 0.9) and gradually approaches unity. The strategy for time-varying pole radius is formulated as follows:
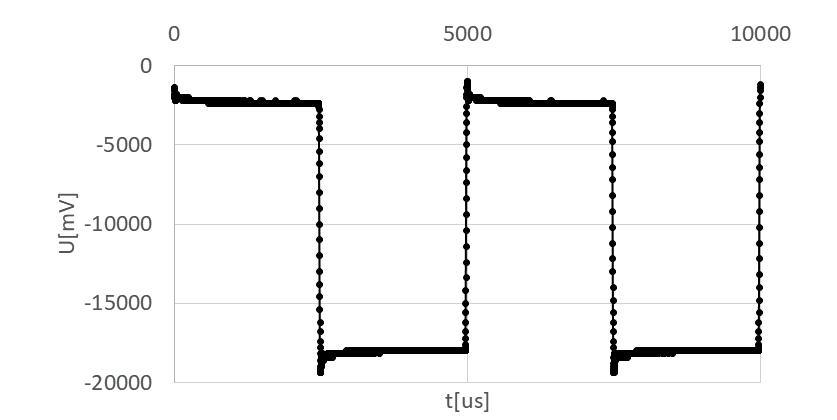
Figure 3 illustrates example of EMG signal after filtering by each method. The results clearly demonstrate immediate suppression of interference from the initial samples when using the proposed method, whereas significant transient oscillations were observed with the conventional notch filter. The adaptive LMS filter exhibited improved performance compared to the traditional notch but still failed to match the rapid transient elimination capability of the proposed approach.
Quantitative evaluation was based on mean square error (MSE) between the filtered and clean EMG signals. The results summarized in Table 1 are taken directly from our prior study,
demonstrating the superior filtering performance of the proposed solution.
In addition to synthetic test signals, real EMG signals from PhysioNet were used to verify practical efficacy of the proposed filter. The method demonstrated consistent performance in realistic conditions, maintaining rapid transient suppression and low MSE, which supports the robustness and clinical applicability of the proposed approach.
As presented in Table I, the proposed notch filter method provides significant improvements in signal qual-ity, achieving a nearly five-fold reduction in MSE compared to the conventional notch filter, and almost three-fold improvement over the adaptive LMS method.
Tab. 1. Mean Square Error (MSE) comparison for tested filtering methods
Tab. 1. Porównanie średniego błędu kwadratowego (MSE) dla testowanych metod filtracji
Method MSE
Conventional notch Filter
Adaptive LMS Filter
Proposed notch Filter
14.54 × 10−4
8.452 × 10−4
3.1343 × 10−4
Fig. 1. Time-varying pole radius r(n) as a function of sample number
Rys. 1. Czasowo zmienny promień bieguna r(n) w funkcji numeru próbki
Fig. 2. Primary signal and the signal filtered by the proposed notch filter
Rys. 2. Sygnał pierwotny oraz sygnał przefiltrowany zaproponowanym filtrem wycinającym
Michal Tyrpa, Jacek Piskorowski
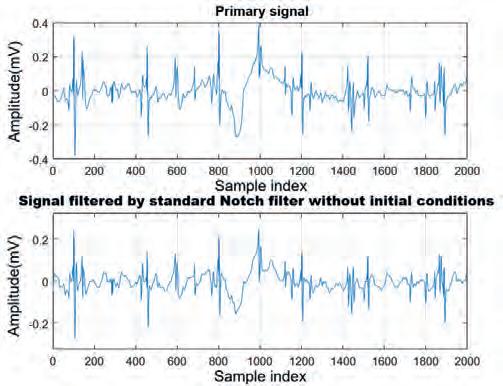
Fig. 3. Primary signal and signal filtered by standard notch filter without initial conditions
Rys. 3. Pierwotny sygnał oraz sygnał przefiltrowany standardowym filtrem notch
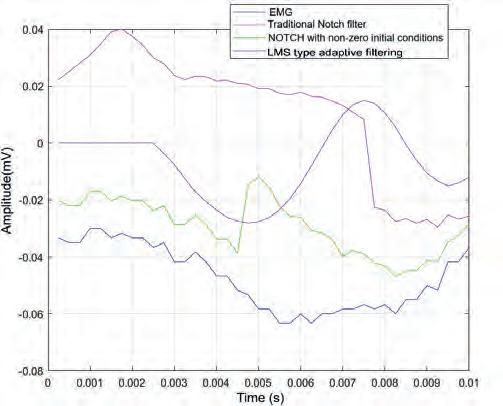
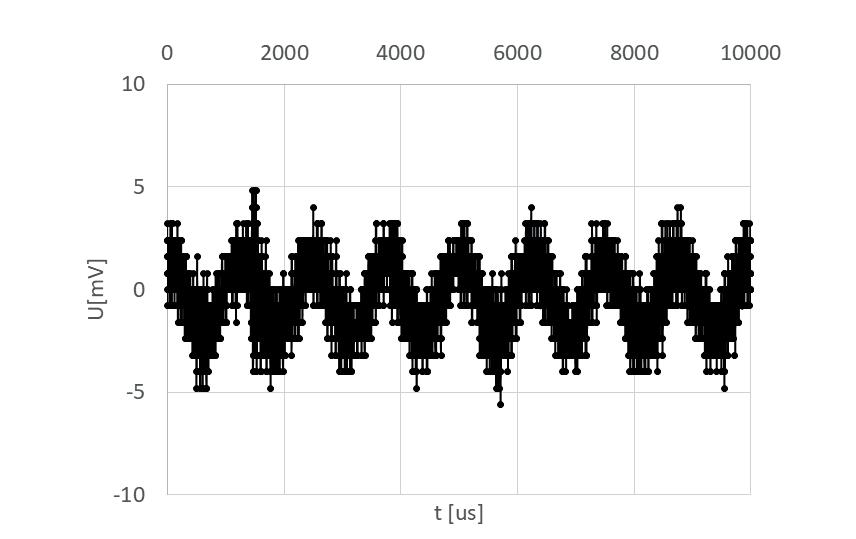
Fig. 4. Time-domain comparison of the filtered EMG signals during the first 0.1 s: (a) Conventional notch filter, (b) Adaptive LMS filter, and (c) The proposed notch filter
Rys. 4. Porównanie przefiltrowanych sygnałów EMG w dziedzinie czasu podczas pierwszych 0,1 s: (a) konwencjonalny filtr wycinający, (b) adaptacyjny filtr LMS oraz (c) zaproponowany filtr wycinający
Further frequency-domain analysis is depicted in Fig. 4, clearly showing the efficiency of the proposed method in suppressing the 50 Hz interference while preserving essential EMG signal frequencies. Noticeable residual peaks around 50 Hz in both the conventional notch and LMS-based filters emphasize the superior selectivity and effectiveness of the proposed approach.
Overall, these experimental findings confirm that incorporating non-zero initial conditions significantly enhances transient suppression performance, validating the suitability of the proposed method for critical biomedical applications, such as real-time myoelectric prostheses and neuromuscular diagnostic systems.
4. Discussion
The experimental results clearly illustrate the superior performance of the proposed notch filtering approach with non-zero initial conditions when compared to conventional notch filtering and adaptive LMS filtering. Specifically, the developed method demonstrated the lowest mean square error (MSE), indicating a significantly better approximation of the origi-
nal EMG signal. Such improvement arises primarily from the integration of carefully chosen non-zero initial filter states. This combination effectively reduces transient oscillations at the onset of filtering, which are typically present in traditional methods [2, 3].
The quantitative analysis revealed that the proposed notch filter significantly outperforms traditional filtering approaches, achieving an approximate 4.64-fold improvement in MSE compared to the conventional notch filter, and a 2.70-fold improvement compared to the adaptive LMS method. This clearly indicates that non-zero initial conditions effectively mitigate the typical limitations associated with prolonged transient responses observed in classical implementations [4, 5].
Another notable advantage of our method is its immediate suppression of interference, crucial in biomedical applications where initial segments of EMG signals are diagnostically relevant. Such rapid stabilization of the filtered output allows the proposed method to preserve clinically significant data from the very beginning of the signal recording process, which is often lost with conventional filtering techniques due to their inherent transient behavior.
Despite these strengths, our study also identified specific limitations. Particularly, while the proposed filter effectively suppressed the fundamental 50 Hz interference, complete attenuation of higher-order harmonics (100 Hz, 150 Hz, etc.) remains challenging. Attempts at using multiple parallel notch filters tuned to harmonic frequencies did not yield entirely satisfactory results, possibly due to interactions between the filters or the complex nature of the harmonic distortions [3, 7].
Future research should therefore explore more advanced multi-notch or frequency-tracking solutions specifically tailored for dynamic and harmonic-rich interference conditions commonly encountered in clinical EMG recordings [8]. Additionally, future research directions include comprehensive time-frequency analysis (e.g., spectrogram analysis) of filtered signals, to provide additional visual and quantitative confirmation of the effectiveness in suppressing 50 Hz interference and its harmonics. As part of future work, the algorithm will be implemented on embedded platforms such as Arduino, with the aim of developing a compact system that acquires EMG signals and performs real-time filtering onboard, enabling low-cost biomedical signal preprocessing in wearable or portable devices.
Furthermore, the current strategy for pole radius adjustment was empirically optimized. Although effective, it might not represent an optimal solution for all types of EMG signals, particularly those subject to varying levels of interference or dynamic changes in signal conditions. Additional studies involving different adaptation strategies – such as Bézier-curve-based or other nonlinear optimization techniques – could potentially yield further performance enhancements [6].
Finally, the computational efficiency of the presented filtering method is another important advantage, especially for real-time biomedical applications. Unlike more computationally demanding techniques such as adaptive LMS or frequency-domain spectral subtraction methods, the proposed notch filter approach offers a simpler and faster solution, making it particularly suitable for embedded medical devices, real-time neurorehabilitation equipment, and portable myoelectric interfaces.
In summary, our proposed method, combining non-zero initial conditions and time-varying pole radius adjustment, demonstrates significant potential to advance EMG signal processing techniques by effectively addressing transient-related artifacts and providing rapid, reliable interference suppression. Nonetheless, further optimization, particularly regarding harmonic suppression and parameter selection, constitutes promising directions for subsequent research.
5. Conclusion
This paper presented an advanced approach for rapidly eliminating 50 Hz power-line interference from electromyographic (EMG) signals, combining non-zero initial conditions with time-varying pole-radius adjustment in a digital notch filter. Experimental validation clearly demonstrated the superior performance of the proposed method over conventional notch filtering and adaptive LMS filtering, particularly in terms of transient suppression, interference removal efficiency, and signal quality preservation. Quantitative evaluation using mean square error (MSE) indicated a significant improvement, with the proposed method achieving approximately five times lower MSE compared to the conventional notch filter and nearly three times lower than the adaptive LMS method.
The main advantage of the proposed technique is its immediate suppression of interference, thereby preserving diagnostically valuable information from the initial segments of EMG recordings, which are typically compromised by prolonged transient responses in conventional filters. Furthermore, the method is computationally efficient and suitable for real-time biomedical applications such as myoelectric prostheses, neuromuscular diagnostics, and portable rehabilitation devices.
Despite the promising results, challenges remain in fully attenuating higher-order harmonics (such as 100 Hz and 150 Hz), necessitating further research. Future studies should focus on developing and optimizing advanced multi-notch or other filtering strategies, possibly employing frequency-tracking algorithms or more sophisticated adaptive methods like Bézier-curve-based filter parameter adjustment.
Overall, the presented notch filtering approach provides a significant advancement in biomedical signal processing, effectively addressing limitations associated with traditional EMG filtering methods and demonstrating strong potential for practical clinical applications.
References
1. Mewett D.T., Nazeran H., Reynolds K.J., Removing power line noise from recorded EMG, 2001 Conference Proceedings of the 23rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, DOI: 10.1109/IEMBS.2001.1017205.
2. Butkevičiūtė E., Bikulčienė L., Sidekerskienė T., Blažauskas T., Maskeliūnas R., Damaševičius R., Removal of Movement Artefact for Mobile EEG Analysis in Sports Exercises, “IEEE Access”, Vol. 7, 2019, 7206–7217, DOI: 10.1109/ACCESS.2018.2890335.
3. Górecka J., Biedka A., Determination of ocular artifacts in the clinical EEG software by a peripheral device, “Electronics”, Vol. 10, No. 2, 2021, DOI: 10.3390/electronics10020108.
4. Pei S.-C., Tseng C.-C., Elimination of AC interference in electrocardiogram using IIR notch filter with transient suppression, “IEEE Transactions on Biomedical Engineering”, Vol. 42, No. 11, 1995, 1128–1132, DOI: 10.1109/10.469385.
5. Piskorowski J., Powerline interference rejection from sEMG signal using notch filter with transient suppression, “Proceedings of IEEE International Instrumentation and Measuring Technology Conference”, Graz, Austria, 2012, 1872–1876, DOI: 10.1109/I2MTC.2012.6229332.
6. Acharyya A., Jadhav P.N., Bono V., Maharatna K., Naik G.R., Low-complexity hardware design methodology for reliable and automated removal of ocular and muscular artifact from EEG, “Computer Methods and Programs in Biomedicine”, Vol. 158, 2018, 123–133, DOI: 10.1016/j.cmpb.2018.02.009.
7. Kocoń S., Piskorowski J., Digital finite impulse response notch filter with non-zero initial conditions, based on an infinite impulse response prototype filter, “Metrology and Measurement Systems”, Vol. 19, No. 4, 2012, 767–776, DOI: 10.2478/v10178-012-0068-X.
8. Okoniewski P., Kocoń S., Piskorowski J., Linear time-varying multi-notch FIR filter for fast EMG measurements, 23rd International Conference on Methods & Models in Automation & Robotics (MMAR), 2018, DOI: 10.1109/MMAR.2018.8486122.
9. Widrow B., Glover J.R., McCool J.M., Kaunitz J., Williams C.S., Hearn R.H., Adaptive noise cancelling: Principles and applications, “Proceedings of the IEEE”, Vol. 63, No. 12, 1975, 1692–1716, DOI: 10.1109/PROC.1975.10036.
10. Lin Y.-D., Tan Y.-K., Tian B., A novel approach for decomposition of biomedical signals in different applications based on data-adaptive Gaussian average filtering, “Biomedical Signal Processing and Control”, Vol. 71, Part A, 2022, DOI: 10.1016/j.bspc.2021.103104.
11. Goldberger A.L., Amaral L.A., Glass L., Hausdorff J.M., Ivanov P.C., Mark R.G., Mietus J.E., Moody G.B., Peng C.K., Stanley H.E., PhysioBank, PhysioToolkit, and PhysioNet: Components of a new research resource for complex physiologic signals, “Circulation”, Vol. 101, No. 23, 2000, e215–e220, DOI: 10.1161/01.cir.101.23.e215. Database Examples of Electromyograms, 2009, DOI: 10.13026/C24S3D.
Tłumienie zakłóceń od sieci energetycznej w sygnałach EMG
za pomocą filtru Notch z niezerowymi warunkami początkowymi
Streszczenie: W artykule przedstawiono udoskonaloną metodę szybkiego tłumienia zakłóceń od sieci energetycznej (50 Hz) w sygnałach elektromiograficznych (EMG). Proponowane rozwiązanie wykorzystuje cyfrowy filtr wycinający (notch), inicjalizowany starannie dobranymi niezerowymi warunkami początkowymi, w połączeniu z czasowo zmiennym promieniem bieguna filtru r(n).
W przeciwieństwie do klasycznych metod, które zazwyczaj cechują się długotrwałymi artefaktami przejściowymi wynikającymi z zerowej inicjalizacji i stałych parametrów filtru, zaprezentowane podejście umożliwia natychmiastowe tłumienie zakłóceń poprzez wstępne ustawienie stanu filtru w taki sposób, jakby zakłócenie znajdowało się już w stanie ustalonym. Skuteczność metody została oceniona na podstawie analizy średniego błędu kwadratowego (MSE), poprzez porównanie wyników z filtracją przy użyciu konwencjonalnego filtru wycinającego o stałym promieniu oraz adaptacyjnego filtru opartego na algorytmie LMS. Wyniki potwierdzają skuteczniejsze tłumienie przejściowe, niższy średni błąd kwadratowy oraz minimalne zniekształcenie użytecznych komponentów sygnału EMG. Proponowane rozwiązanie jest szczególnie przydatne w zastosowaniach przetwarzania sygnałów biomedycznych, w których kluczowe są szybkie ustalenie się sygnału i minimalizacja jego zniekształceń – na przykład w protezach mioelektrycznych i urządzeniach do neurorehabilitacji.
Słowa kluczowe: elektromiografia, eliminacja interferencji, filtracja wycinająca o zmiennych parametrach w czasie, tłumienie stanów przejściowych, filtracja w czasie rzeczywistym
Michal Tyrpa, Jacek Piskorowski
Prof. Jacek Piskorowski, DSc, PhD, Eng. jacek.piskorowski@zut.edu.pl
ORCID: 0000-0002-6670-4057
He was born in Piła, Poland, in 1977. He received the M.Sc. degree in electronic engineering and the Ph.D. degree from Szczecin University of Technology, Szczecin, Poland, in 2002 and 2006, respectively. He obtained the title of professor in 2024. Since 2002, he has been with the Faculty of Electrical Engineering, West Pomeranian University of Technology (formerly Szczecin University of Technology), Szczecin, where he is currently a Full Professor. His research activity is mainly focused on the analysis and synthesis of systems and circuits with time-varying parameters.
Michał Tyrpa, MSc, Eng. michaltyrpa@op.pl
ORCID: 0009-0001-7107-3341
He received the Bachelor of Engineering degree in 2023 and the Master of Science degree in 2024, both in Automatic Control and Robotics, from the West Pomeranian University of Technology in Szczecin, Poland. He worked within the Bosch Group as an Automation Support Engineer. Currently hired at 3Shape, where he is responsible for implementing safety solutions in production equipment and coordinating ESD protection. His research interests include adaptive signal filtering in IoT systems for data quality improvement and anomaly detection.
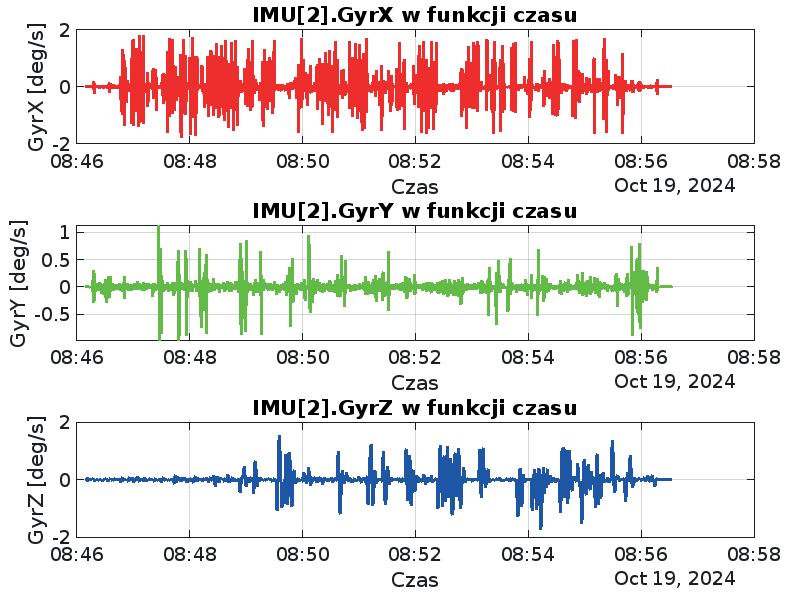
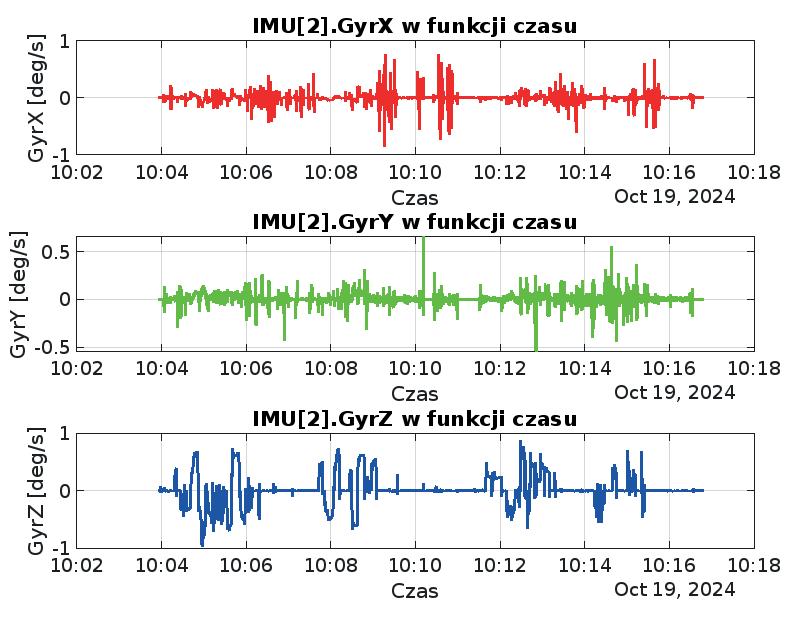
Identification and Compensation of Gyroscope Measurement Errors: Signal Filtering Based on Static and Dynamic Measurements in an Inertial Navigation System
Szymon Elert
Military Institute of Armament Technology, ul. Wyszyńskiego, 05-220 Zielonka, Poland
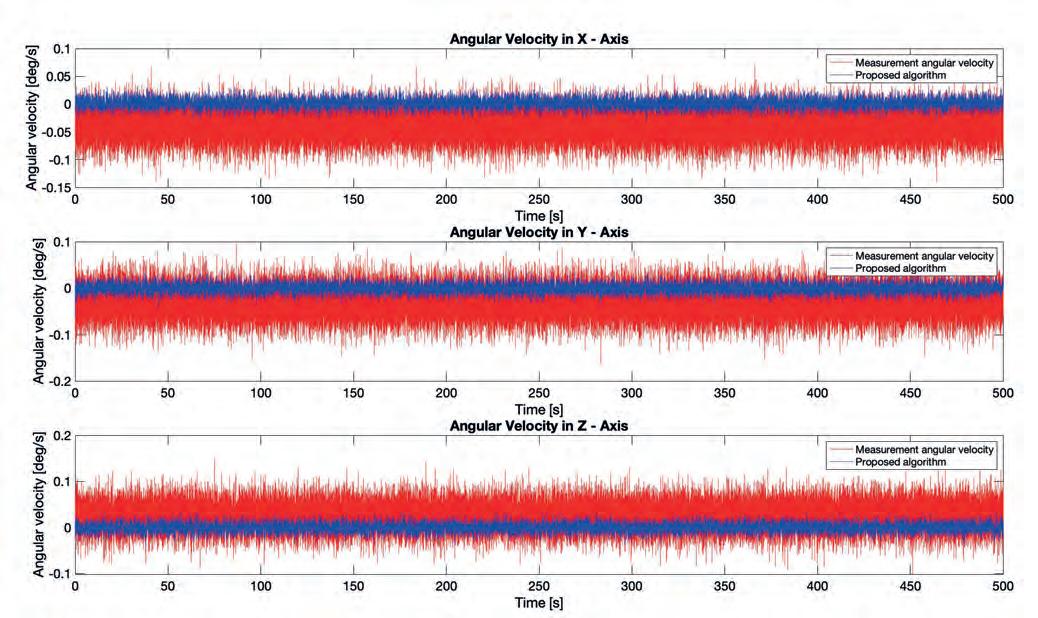
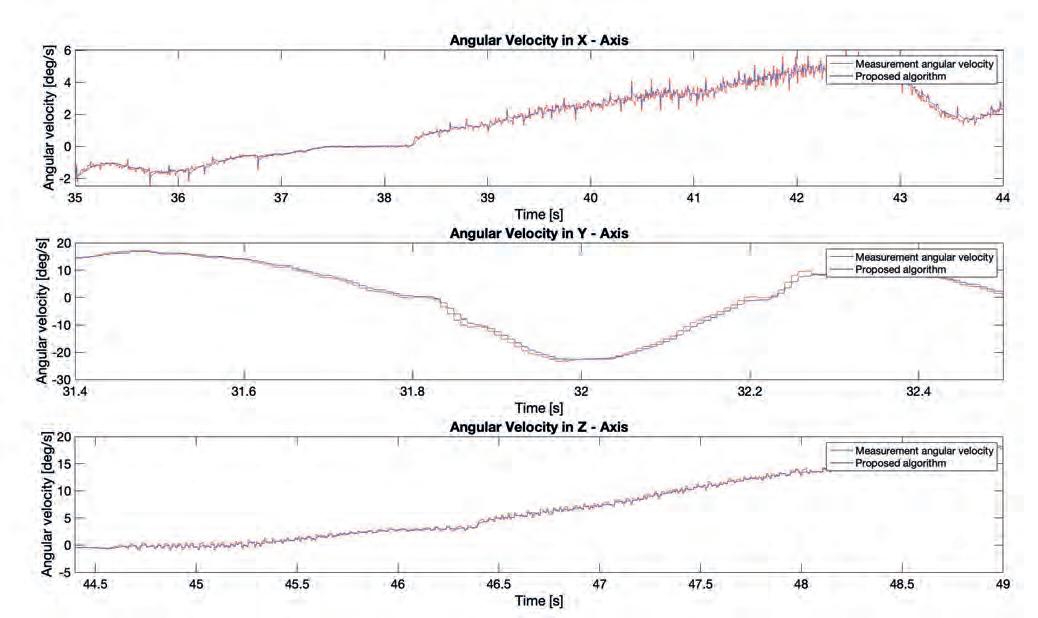
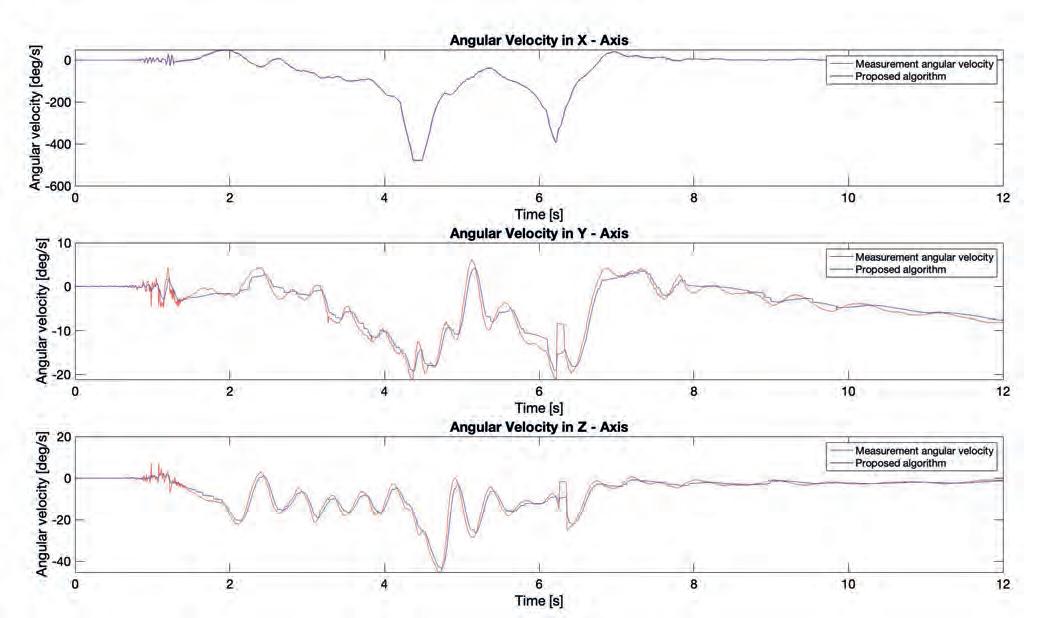
Abstract: This paper addresses the issue of identifying measurement errors in the MEMS gyroscope, which serves as the primary source of data for the rocket’s inertial navigation system (INS). The research focused on error analysis through static and dynamic testing, followed by a detailed analysis of angular velocity measurement data from the flight of a stabilized rocket, guided to a specific point in space. The objective of the study was to determine and filter gyroscope measurement errors, such as bias, random walk, and noise. An adaptive filter was proposed, which adjusts to the changing dynamics of the rocket, allowing for more effective compensation of these errors. In the final section, conclusions are presented that identified shortcomings in the algorithm and outlined directions for further work on its optimization. The algorithm was validated in static, dynamic, and actual rocket flight conditions.
Gyroscopes play a critical role in inertial navigation systems (INS), which are widely used in aerospace applications, including the navigation systems of rockets. As the primary sensor responsible for measuring angular velocity, gyroscopes provide essential data that is used to estimate the orientation and movement of a vehicle. In the context of rocket navigation, the accuracy and reliability of gyroscopes are paramount, as even small measurement errors can lead to significant deviations in trajectory or instability during flight [1–3]. Inertial navigation systems are autonomous systems that calculate position, velocity, and orientation based solely on data from internal sensors, such as gyroscopes and accelerometers. Unlike GPS, which relies on external satellite signals, INS operates independently, making it highly useful in environments where external signals are unavailable or unreliable, such as during rocket flights through the atmosphere or in space. This autonomy provides a significant advantage in aerospace applications, particularly in terms of system robustness and reliability.
Autor korespondujący:
Szymon Elert, elerts@witu.mil.pl
Artykuł recenzowany nadesłany 10.04.2025 r., przyjęty do druku 22.07.2025 r.
However, INS also presents several challenges, particularly related to the accumulation of errors over time. Gyroscope measurements, while generally accurate in the short term, are susceptible to drift, bias, and noise. These errors, if not properly managed, can lead to increasing inaccuracies in the estimated position and orientation of the rocket. To mitigate these issues, advanced filtering algorithms, such as the Kalman filter, are employed to improve the accuracy of sensor data by compensating for known error sources. There have been numerous studies on compensating for gyroscope errors, ranging from simple methods such as Moving Average Filters [4], to advanced techniques utilizing neural networks [5–7]. For a long time, the Kalman filter has been a proven and widely used method, extensively described in the literature [8–14, 32]. Since this filter cannot always be directly applied to nonlinear models, it has been modified to increase its flexibility by dynamically adjusting the parameters of the covariance matrices Q and R, al-lowing for more effective filtering in systems with variable dynamics [15,16]. Stochastic processes are also increasingly employed, as they enable the identification of errors in gyroscopes, such as nonlinear bias and measurement noise, which are difficult to eliminate. The results of these studies have been presented in the literature [17,18]. Available research also shows results focusing on the elimination of specific stochastic errors, such as Allan variance analysis [19–21], quantum random walk [22], or Gaussian Noise [23].
One of the promising solutions is the application of advanced signal decomposition methods, such as improved
Empirical Mode Decomposition (EMD) combined with the ARMA model. Zeng et al. [24] demonstrated that this approach effectively separates and compensates for random errors in MEMS gyroscopes, reducing the root mean square (RMS) error by more than 50 % in both static and dynamic tests. Another important area of research is the real-time compensation of temperature-related errors, which significantly affect the accuracy of MEMS gyroscopes in aerospace environments. Wang et al. [25] developed an automatic demodulation phase error compensation algorithm that ensures stable gyroscope performance across a wide temperature range (from –40 °C to +60 °C), improving bias stability to levels below 0.1 °C/h. In the field of artificial intelligence, Shen et al. [26] combined Long ShortTerm Memory (LSTM) neural networks with the Kalman filter and the Expectation-Maximization (EM) algorithm to compensate for bias drift in environments with random vibrations. This method demonstrated high effectiveness in dynamic testing conditions, confirming the potential of machine learning in modeling complex, time-varying measurement errors. Recent publications also describe the use of ensemble learning algorithms, such as XGBoost and Multi-Layer Perceptron (MLP) neural networks, for automatic calibration of MEMS gyroscopes [27]. Additionally, the new MoE-Gyro framework, based on Mixture of Experts networks, enables simultaneous signal reconstruction beyond the measurement range and noise reduction, significantly extending the dynamic range and improving the noise characteristics of MEMS gyroscopes [28].
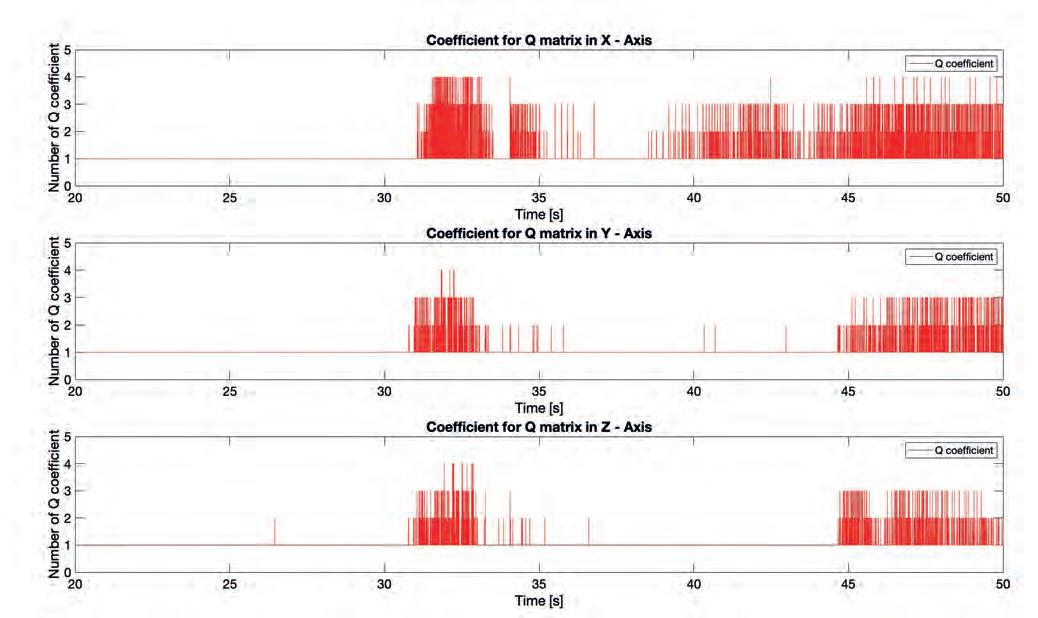
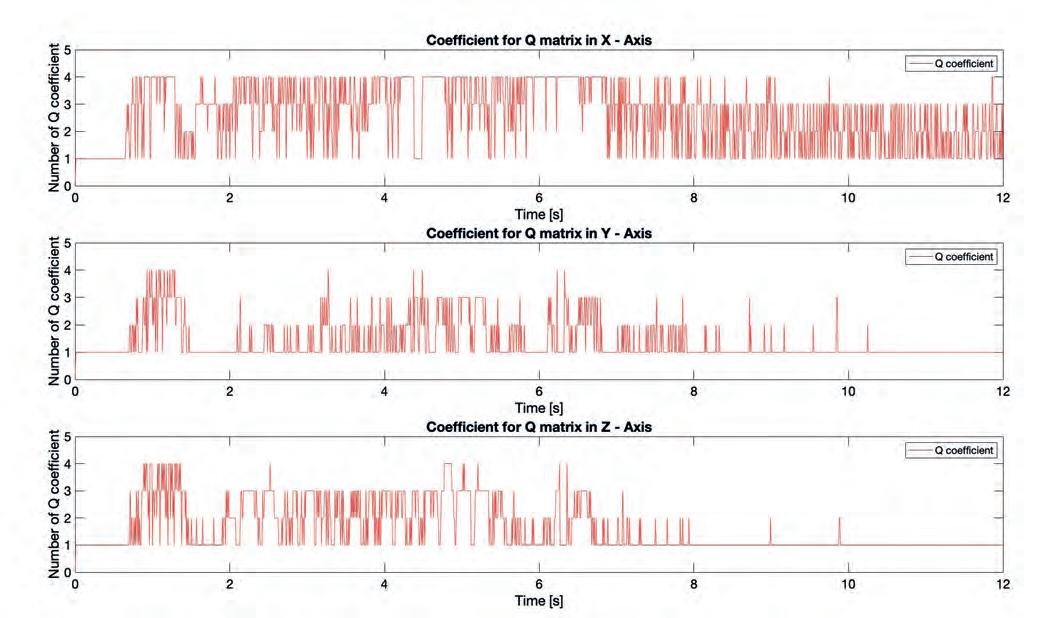
The use of gyroscopes in rocket navigation offers both advantages and limitations. On the one hand, INS provides continuous, real-time updates on the vehicle’s state without relying on external data sources, which is crucial for maintaining control and stability throughout the mission. On the other hand, the inherent errors in gyroscope measurements require sophisticated error identification and compensation techniques to ensure the system’s performance meets the stringent requirements of aerospace navigation. This paper focuses on the identification of gyroscope measurement errors and the implementation of signal filtering techniques based on both static and dynamic measurements. By analyzing these errors and applying appropriate compensation methods, it is possible to improve the overall accuracy and reliability of inertial navigation systems (INS) in rocket applications, ensuring precise navigation and control throughout the mission. In the proposed approach, adaptation was implemented by dynamically adjusting the parameters of the Kalman filter according to the current flight conditions of the rocket. A key element of this adaptation involved modifying the process noise variance matrix (Q) based on the increments of angular velocity measured by the gyroscope. During highly dynamic phases of flight, characterized by large changes in angular velocity, the filter reduced its reliance on the theoretical model and increased the weight of the current measurements, allowing for a faster response to changing flight conditions. Conversely, during stable flight phases, where angular velocity changes were minimal, the filter relied more on the motion model, reducing the influence of measurement noise. This approach allowed the filter to flexibly adapt its operation, ensuring high estimation accuracy under both dynamic and static conditions.
2. Mathematical model of gyroscope
2.1. Measurement model description
The rocket navigation system is based on various, often integrated systems such as the Inertial Navigation System, the Global Navigation Satellite System (GNSS), and the Astronavigation System. This study focuses on the analysis of measurement data from the Inertial Measurement Unit (IMU), whose
measurements provide real-time navigation data estimates for the rocket. The IMU used in the research is built using MEMS technology, with its specific parameters listed in Table 1. This unit contains two orthogonal triads of sensors: one consisting of accelerometers and the other of gyroscopes. The accelerometers measure linear motion in three directions, while the gyroscopes measure angular motion in three directions. In addition to inertial sensors, the unit also includes electronics that enable preliminary data filtering and provide measurement output via digital signals
Tab. 1. Basic parameters of the inertial navigation unit used in the r esearch
Tab. 1. Parametry jednostki nawigacji inercyjnej wykorzystanej do badań
Due to the focus of this study on the analysis of errors and the correction of measured angular velocities, the mathematical model of the gyroscope is presented below in the form of the observation equation for angular velocity measurements [12], which accounts for key errors affecting measurement accuracy. This model serves as the fundamental basis for analyzing and correcting angular velocity measurement errors, which are critical in navigation systems, such as INS.
, b SNbbgg ωωε =⋅⋅++ (1)
where: bω – gyroscope measurement vector (deg/s), bω – true angular rate velocity vector (deg/s), b g – gyroscope instrument bias vector (deg/h), S – matrix representing the gyro scale factor, N – vector representing non-orthogonality of the gyro triad, g ε – vector representing the gyro sensor noise (deg/h).
2.2. Mathematical errors description
The measurement of angular velocities from the gyroscope actually consists of various types of errors, which affect the measured values to a greater or lesser extent. Their occurrence depends on the dynamics of the measured object and the environment in which the measurements are performed. Due to their origin, several main types of errors are distinguished, which were taken into account during the tests:
Bias is a systematic error whose value remains constant over a short period of time but may slowly change over a longer period. In the case of long-term measurements, bias can gradually shift, leading to an accumulating error in the measurements. However, within shorter time intervals, its value is generally stable, causing a consistent offset in the measurement results. It is a systematic error that does not change within a specific time frame, but during longer measurements, its value may experience slight increases. Therefore, the equation for bias in discrete form, ac-counting for slow change over time, i.e., drift, is presented below:
2 210 [][][], g bkbkbkb =++ (2)
where: b g[k] – value of bias at the discrete time step k, k –discrete value of the bias at time , k tkt =⋅∆ t∆ – time between next measurements, b2 – polynomial coefficient 2nd
order, b1 – polynomial coefficient 1st order (linear drift), b0 – initial value drift.
The scale factor is the deviation of the input-to-output gradient from unity, and it is therefore proportional to the actual angular velocity around the gyroscope’s sensitivity axis [12]. Inaccuracies in the gyroscope’s scale factor affect the accuracy of the angular velocity measurement. Typically, the IMU manufacturer provides information about the scale factor value in the documentation; however, to obtain an accurate scale factor, an analysis of this parameter was conducted based on the static testing of the sensor. The values provided by the manufacturer are usually given in units of ppm, which means parts per million.
accumulates over time and is influenced by other parameters such as temperature.
White noise – random signal with zero mean and a specified standard deviation based on measurements from the gyroscope. This noise is described as a Gaussian process [23, 31].
where: () t ω – gyroscope white noise with zero mean and variance [deg/s].
where: SF – scale factor, SF acc – scale factor defined by manufacturer (accuracy).
The scale factor values obtained through empirical methods and the scale factor values from the documentation were averaged to obtain the final coefficient S
Random walk (RW) is a parameter that defines the accumulation of measurement errors over time. In a gyroscope, it is caused by bias drift and the presence of white noise. Given that random walk refers to the process by which the angular velocity value changes randomly, its value should be included in the process noise matrix Q in equation (19). The method for determining RW is presented below [33]. var(), RW =∆ω (8)
where: RW – variance of the accumulation of measurement errors over time [deg/s2], ∆ω – difference in the increments of angular velocities [deg/s].
where: SF1 – gyroscope scale factor form datasheet, SF2 – gyroscope scale factor calculated form static tests.
The non-orthogonality error refers to the lack of perpendicularity between the gyroscope’s axes. This error causes disturbances in the measurement results for each axis, which in navigation systems can lead to incorrect estimation of the rocket’s orientation and trajectory. These errors are identified using specialized devices that rotate the gyroscope around a single axis with high precision, allowing for accurate identification and compensation of the error.
Sensor noise is a signal that arises from random processes and carries no useful information. This noise significantly affects the accuracy and quality of gyroscope measurements, which can lead to incorrect estimation of orientation angles in space and position. Since it is based on random processes, accurately identifying it is often complicated, especially when the gyroscope is measuring angular velocities of a highly dynamic object, such as a rocket. To properly determine the value of gyroscope noise, all its components must be considered:
Drift – random variation of the gyroscope bias over time. This component is modeled as a random process that gradually
Quantization Noise (QN) introduces an error into the measured signal resulting from the difference between the analog signal and the nearest digital value at each sampling instant from the quantizer, that is, the analog-to-digital converter. This noise is typically modelled as a stochastic process [30, 31]:
where: q∆ – difference between two adjacent quantization levels and is expressed by the formula:
where: res ω – the total range of the gyroscope’s measurement values [deg/s], n – number of bits of the ADC.
Quantization Noise is an important parameter because it can significantly affect the accuracy and quality of results in devices where signals are processed in real-time, such as an inertial navigation unit. This noise has been included in the process noise variance matrix Q in equation (19) as a parameter determined as variance [34, 35]:
var[()]. 12 q qt
= (13)
2.3. Error determination algorithm
Kalman filtering
Methods for identifying angular velocity measurement errors have been thoroughly described in numerous scientific publications, with selected examples cited in Chapter 1. However, algorithms available in the literature do not always provide satisfactory results under all operational conditions.
The aim of this research was to adjust individual components of the estimation algorithm to minimize the impact of angular velocity measurement errors, which constitute the primary input to the algorithm responsible for determining spatial orientation angles. These orientation angles are subsequently used to calculate the position and velocity of the rocket in the inertial navigation system.
In this study, the Extended Kalman Filter (EKF) was applied as the method for error identification and compensation. The filter was adapted to account for the key sources of errors described in Section 2.2, including drift, random noise, and nonlinear measurement disturbances. EKF was selected as the primary estimation tool due to its ability to simultaneously model the system dynamics and the characteristics of measurement errors in nonlinear state models.
Several key aspects were taken into consideration during the tuning of the algorithm components: the rocket exhibits high dynamics; therefore, minimizing algorithmic delays is essential, it is necessary to provide measurement data updates as frequently as possible, high measurement reliability was ensured by utilizing a test platform simulating rocket motion in three axes (yaw, pitch, roll), allowing for detailed analysis of the obtained results.
The author acknowledges that the EKF is not an optimal estimator for systems with strongly nonlinear state transitions. Therefore, a crucial element of the research was the proper selection of the initial state estimation to ensure reliable filter performance in both static and dynamic tests. The results of these tests are presented in Chapter 3. According to the EKF methodology [12, 16, 32], assuming that bω is the actual angular velocity and b g is the gyroscope bias, the equations were formulated
where: xpred – the state prediction vector predicting the state before incorporating new measurements, xest – the state estimation vector incorporating measurements and corrections, F – the matrix responsible for the linearization of the nonlinear state transition function.
where: t∆ – the sampling time [s].
Prediction error covariance matrix:
where: Ppred – prediction error covariance matrix, P est – the estimation of the error covariance matrix determined in the correction step, Q – the process noise variance matrix that accounts for errors such as Random Walk and Quantization Noise and is described as follows:
The state transition model for prediction is written
where: , , x Qω , , y Qω ,z Qω – the sum of the variance of RW and QN errors, respectively for each axis X, Y, Z; , Qbx , , Qby , Qbz – the representation of the process noise for the bias, respectively for each axis X, Y, Z.
Correction step: T T1 ( ), pred pred KPHHPHR =⋅⋅⋅⋅+ (20)
where: K – Kalman Gain, R – the measurement noise variance matrix for the angular velocities from the gyroscope, H – Jacobian matrix,
where: I3 – identity matrix of the measured angular velocities and the gyroscope bias,
process noise.
Prediction step:
Update estimation state:
where: z(t) – the measurement vector that includes the measured angular velocities and the gyroscope bias.
an increase in the process noise and, therefore, an increase in the sensitivity of the Kalman filter to minor variations in the signal. This allowed for compensation of modeling errors and uncertainties under low-dynamic conditions.
This approach enabled the Kalman filter to adapt flexibly to changing operating conditions, ensuring high estimation accuracy both during dynamic maneuvers and in stable phases of flight.
3. Results
This chapter presents the results of tests conducted on gyroscopes in three different configurations, aimed at evaluating their performance under static, dynamic, and real rocket flight conditions. The first configuration involved static measurements, which al-lowed for the assessment of basic gyroscope parameters such as drift and inherent noise in ideal conditions, without the influence of motion.
Update of the error covariance matrix.
Adaptive filtering
To improve the accuracy and flexibility of the algorithm, the Q matrices were multiplied by coefficients whose values depended on the increments of angular velocities measured at each time step. This approach allowed for the dynamic adjustment of the Q matrices according to the current motion conditions, taking into account the changing dynamics of the system. As a result, the Kalman filter responded better to varying flight conditions, significantly enhancing the precision and stability of state estimation in real time.
where: Qk – the process noise variance matrix at step k, kω –the measured angular velocity at step k [deg/s], 1 kω –the measured angular velocity at the previous step [deg/s], a – a scaling factor dependent on the increment of angular velocity, Q0 – is the initial variance matrix.
The correction coefficients a were determined experimentally based on data obtained from the flights of a maneuvering rocket as well as from static and dynamic laboratory tests. A wide range of dynamic conditions was analyzed, including both intense rocket maneuvers in real flight conditions and stable operation phases tested under laboratory conditions.
Based on these studies, optimal values of the coefficients were selected to provide the best possible compromise between the adaptation speed of the filter and the stability of the estimation.
During the operation of the algorithm, the coefficients were not calculated dynamically, but their values were adopted as constant or functionally dependent on the magnitude of the angular velocity increments, in accordance with the results of previous experiments. Their values decreased with increasing increments of angular velocity, leading to a reduction of the process noise in the Kalman filter under dynamic conditions. This allowed the filter to limit the influence of model errors in situations where the dynamic changes in motion provided sufficient information for state estimation, enabling more stable and accurate filtering.
Conversely, in static conditions or during small angular velocity changes, the values of the coefficients increased, leading to
The second configuration included measurements of a gyroscope mounted on a gimbal, simulating the dynamics of rocket flight. This test aimed to replicate real flight conditions in a controlled laboratory environment and enabled the analysis of gyroscope behavior during dynamic maneuvers.
The third configuration was based on real measurements taken during the flight of a subsonic rocket, stabilized in three channels (yaw, pitch, roll), guided to a point in space. This part of the research was crucial for understanding the actual loads and disturbances that gyroscopes are exposed to during flight, which allowed for the assessment of their accuracy and stability in operational conditions.
Below, in Table 2, the values of four coefficients modifying the Q matrix depending on the dynamics are presented.
Tab. 2. Table of dynamic scaling coefficient values applied in the algorithm analysis
Tab. 2. Zestawienie wartości dynamicznych współczynników skali użytych podczas analizy algorytmu
The conclusions drawn from the analysis of the results presented in Figure 1 indicate a significant improvement in the quality of angular velocity measurements after applying the proposed filtering algorithm. The algorithm successfully reduced process noise by up to ten times compared to raw data, demonstrating the effectiveness of the adopted filtering approach. Additionally, a correction of gyroscope bias error over time was observed, visible as a gradual convergence of the results toward zero. This means that the algorithm not only reduces noise but also effectively compensates for systematic drift errors, thereby improving measurement accuracy. As a result, the outputs from the proposed algorithm are much closer to actual values, and the improved stability of the gyroscope signal is crucial for further applications in the inertial system.
The conclusions from the analysis of the results presented in Figures 2 and 3, which illustrate angular velocity measurements during the rocket flight simulation with the IMU system mounted on a gimbal, indicate the effectiveness of the applied algorithm in reducing measurement errors. The algorithm performs well in eliminating noise that obscured the signal, allowing
for clearer and more reliable data regarding flight dynamics. However, some delay in measurement responses can be observed on the charts, which is due to the low sampling frequency of the IMU, set at 250 Hz in this case. Despite this limitation, the algorithm still provides significant signal quality improvement, which is important for further analysis of rocket dynamics and precise reproduction of its movement. However, a higher sampling frequency could minimize delays and further improve measurement accuracy.
Furthermore, Figure 3 presents selected segments of the measured angular velocity signals for each axis. These segments clearly show the smoothing of the measurement signals from the gyroscopes. This effect results from the reduction of noise generated by the sensor, which significantly improves the clarity and stability of the signal in the analyzed measurement ranges. Figure 5 presents data recorded during the flight of a subsonic rocket, stabilized in three channels and guided to a specific point in space. The chart shows varying effectiveness of the algorithm
Fig. 1. Comparison of the measured angular velocity signals from gyroscopes with the filtered signals in the static test Rys. 1. Porównanie sygnałów zmierzonych prędkości
Fig. 2. Comparison of the measured angular velocity signals from gyroscopes with the filtered signals in the dynamic test Rys. 2. Porównanie sygnałów zmierzonych
Fig. 3. Comparison of the measured angular velocity signals from gyroscopes with the filtered signals in the dynamic test Rys. 3. Porównanie sygnałów zmierzonych prędkości kątowych z giroskopów z sygnałami przefiltrowanymi w badaniu dynamicznym
depending on the axis being analyzed. The algorithm performed best in reducing noise and improving measurement accuracy on the rocket’s roll axis (X-axis). Delays in this axis were minimal, and the algorithm’s match to actual angular velocity values was most precise, indicating the algorithm’s effectiveness at relatively low angular velocity amplitudes in this channel. On the Y and Z axes, despite lower angular velocity amplitudes compared to the X-axis, larger delays were observed. This is likely due to the limited number of a coefficients, which should have had a gre-
ater number of discrete values in the process of scaling the Q matrix. It is also worth noting that the values were sampled at 125 Hz, which further limited the real-time effectiveness of the algorithm. The lower sampling frequency may have reduced the algorithm’s ability to respond quickly to sudden changes in the rocket’s dynamics, which was particularly evident on the Y and Z axes. Figures 4 and 6 show the variability of the Q-matrix gain coefficients over time, respectively for laboratory tests (Fig. 4)
Fig. 4. The results of coefficients a scaling the matrix Q during dynamic test Rys. 4. Przebieg wykorzystywanych współczynników skali do macierzy Q dla badania dynamicznego
Fig. 5. Characteristics of changes in the measured angular velocity signals from gyroscopes and filtered signals during the guided rocket flight test Rys. 5. Charakterystyka zmian sygnałów zmierzonych prędkości kątowych z giroskopów z sygnałami przefiltrowanymi w badaniu lotu rakiety sterowanej
and for the actual rocket flight (Fig. 6). The perpendicular axis represents the individual coefficient numbers from a1 to a4
4. Discussion
Several key issues related to the Kalman filter algorithm, Q-matrix gain coefficients, and hardware limitations of the MEMS gyroscopes need to be discussed in detail.
Firstly, the Kalman filter algorithm in its current form uses a variable process noise covariance matrix Q, whose values are modified by coefficients dependent on the rocket’s dynamics. These coefficients do not change continuously but are adjusted in discrete steps according to the current flight conditions, specifically based on the increments of angular velocity at a given moment in time.
The analysis of the results showed that the largest estimation errors and delays are associated with the coefficients a2 and
Fig. 6. The results of coefficients a scaling the matrix Q during missile flight test Rys. 6. Charakterystyka zmian wykorzystywanych współczynników skali do
macierzy Q podczas lotu rakiety sterowanej
a3, particularly in the Y and Z axes. The available ranges of these coefficients proved insufficient, especially during intensive rocket maneuvers, where angular velocities change rapidly with large amplitudes. Increasing the number of available coefficient values within the ranges of a2 and a3 would enable the algorithm to more precisely adjust the parameters of the Q matrix to rapid changes in the flight dynamics. As a result, the response delays of the filter and state prediction errors would be reduced. Such a modification could significantly improve the estimation accuracy during dynamic rocket maneuvers, where precise determination of motion parameters is critical.
The current sampling frequency of 250 Hz and 125 Hz, although appropriate for many applications, proved to be insufficient in the context of high-dynamic rocket maneuvers. In the case of more complex movements, such as rapid rotations in the yaw, pitch, and roll channels, observed signal delays may be the result of too low a sampling frequency of the IMU. The author plans to increase the sampling frequency to at least 1 kHz, which will allow for a more accurate reflection of dynamic changes and better synchronization of the algorithm with the actual conditions of the rocket flight. Increasing the sampling frequency could not only reduce delays but also improve the quality of the data provided to the filtering algorithm, which will result in more precise state estimation.
Although the MEMS gyroscopes used in the research offer many advantages, such as low weight and cost, they also have their limitations, particularly in terms of measurement accuracy. For MEMS sensors, some errors, such as drift or inherent noise, are difficult to fully compensate for, especially in extreme dynamic conditions like rocket flight. It is worth noting that while the Kalman filter algorithm effectively reduces noise and compensates for systematic errors, complete compensation for all errors is impossible with MEMS sensors. However, in applications such as rocket guidance, the autopilot can handle small measurement errors, maintaining appropriate stabilization and precise guidance to a target point in space. This means that despite some limitations, the navigation system can operate at a satisfactory level for the planned mission execution.
In conclusion, the proposed changes to the algorithm and the increase in sampling frequency should significantly improve the accuracy and performance of the navigation system. Despite some hardware limitations, especially with MEMS gyroscopes, further modifications to the algorithm and optimization of operational parameters will allow for even better results in future studies.
References
1. Thienel J.K., Sanner R.M., A Coupled Nonlinear Spacecraft Attitude Controller and Observer with an Unknown Constant Gyro Bias and Gyro Noise, “IEEE Transactions on Automatic Control”, Vol. 48, No. 11, 2003, 2011–2015, DOI: 10.1109/TAC.2003.819289.
2. Gelb A., Sutherland A., Design approach for reducing gyro-induced errors in strapdown inertial systems, Control and Flight Dynamics Conference, 1968, DOI: 10.2514/6.1968-830.
3. Miller J.E., Feldman J., Gyro reliability in the Apollo Guidance, Navigation and Control system, “Journal of Spacecraft and Rockets”, Vol. 5, No. 6, 2008, 638–643, DOI: 10.2514/3.29323.
4. Mark J., Brown A., Matthews T., Quantization reduction for evaluating laser gyro performance using a moving average filter, IEEE International Conference on Acoustics, Speech and Signal Processing 1984, DOI: 10.1109/ICASSP.1984.1172629.
5. Zhu C., Cai S., Yang Y., Xu W., Shen H., Chu H., A Combined Method for MEMS Gyroscope Error Compensation Using a Long Short-Term Memory Network and Kalman
Filter in Random Vibration Environments, “Sensors”, Vol. 21, No. 4, 2021, DOI: 10.3390/s21041181.
6. Zhu Z., Bo Y., Jiang C., A MEMS Gyroscope Noise Suppressing Method Using Neural Architecture Search Neural Network, “Mathematical Problems in Engineering”, 2019, DOI: 10.1155/2019/5491243.
7. Jiang C., Chen S., Chen Y., Zhang B., Feng Z., Zhou H., Bo Y., A MEMS IMU De-Noising Method Using Long Short Term Memory Recurrent Neural Networks (LSTM-RNN), “Sensors”, Vol. 18, No. 10, 2018, DOI: 10.3390/s18103470.
8. Zhang H., Wang W., Li W., Wang P., Ren G., Ma G., Wang S., Zheng Yu., Shluga S.N., An estimation of the mems gyroscope error based on the Kalman filter algorithm, “Telecommunications and Radio Engineering”, Vol. 78, No. 4, 2019, 1295–1301, DOI: 10.1615/TelecomRadEng.v78.i14.70.
9. Guo H., Hong H., Research on Filtering Algorithm of MEMS Gyroscope Based on Information Fusion, “Sensors”, Vol. 19, No. 16, 2019, DOI: 10.3390/s19163552.
10. Liu Y., Guo Z., Zhang Q., Modeling of MEMS gyroscope Random Error Based on Kalman Filter, IEEE Symposium Series on Computational Intelligence (SSCI) 2019, DOI: 10.1109/SSCI44817.2019.9002682.
11. Chia J., Low K., Goh S., Xing Y., A low complexity Kalman filter for improving MEMS based gyroscope performance, Proceedings of the 2016 IEEE Aerospace Conference, DOI: 10.1109/AERO.2016.7500795.
12. Noureldin A., Karamat T.B., Georgy J., Inertial Navigation System, Kalman Filter, “Fundamentals of Inertial Navigation, Satellite-based Positioning and their Integration”, Springer 2012, 125–166, 225–245, DOI: 10.1007/978-3-642-30466-8.
13. Xue L., Jang C., Chang H., Yang Y., Qin W., Yuan W., A novel Kalman filter for combining outputs of MEMS gyroscope array, “Measurement”, Vol. 45, No. 4, 2012, 745–754, DOI: 10.1016/j.measurement.2011.12.016.
14. Erzberger H., Application of Kalman Filtering to error correction of inertial navigators, National Aeronautics and Space Administration, 1967.
15. Galante J.M., Sanner R.M., A Nonlinear Adaptive Filter for Gyro Thermal Bias Error Cancellation, AIAA Guidance, Navigation and Control Conference 2012, DOI: 10.2514/6.2012-4475.
16. Brown S.D., Rutan S.C., Adaptive Kalman Filtering, “Journal of Research of the National Bureau of Standards”, Vol. 90, No 6, 1985, 403–407.
17. Fazelinia M., Ebadollahi S., Ganjefar S., Stochastic analysis of drift error of gyroscope in the single-axis attitude determination, “Measurement”, Vol. 237, 2024, DOI: 10.1016/j.measurement.2024.115136.
18. Kim I., Kang T., Lee J.G., Design of a gyroscope with minimum error covariance, “Control Engineering Practice”, Vol. 3, No. 7, 1995, 933–937, DOI: 10.1016/0967-0661(95)00076-7.
19. Hameed Aslam Q., Iqbal A., Bibi F., Bibi S., Error Estimation of Inertial Sensors using Allan Variance, “IFAC Proceedings Volumes”, Vol. 41, No. 1, 2008, 167–171, DOI: 10.3182/20080408-3-IE-4914.00030.
20. Al lan Variance: Noise Analysis for Gyroscopes, Freescale Semiconductor, Application Note 2015, Document Number: AN5087.
21. Hou H., Modeling Inertial Sensors Using Allan Variance, Master Degree, University of Calgary 2004.
22. Kadian K., Garhwal S., Kumar A., Quantum walk and its application domains: A systematic review, “Computer Science Review”, Vol. 41, 2021, DOI: 10.1016/j.cosrev.2021.100419.
Szymon Elert
23. Boncelet C., Chapter 7 – Image Noise Models, “The Essential Guide to Image Processing”, 2009, 143–167, DOI: 10.1016/B978-0-12-374457-9.00007-X.
24. Zeng Y., Liu Y., Zhang M., A method for compensating random errors in MEMS gyroscopes based on interval empirical mode decomposition and ARMA, “Measurement Science and Technology”, Vol. 35, No. 1, 2023, DOI: 10.1088/1361-6501/ad00d3.
25. Wang J., Yang G., Liu F., An InRun Automatic Demodulation Phase Error Compensation Method for MEMS Gyroscope in Full Temperature Range, “Micromachines”, Vol. 15, No. 7, 2024, DOI: 10.3390/mi15070825.
26. Sheng Cai., Zhu C., Yang Y., A Combined Method for MEMS Gyroscope Error Compensation Using a Long ShortTerm Memory Network and Kalman Filter in Random Vibration Environments, “Sensors”, Vol. 21, No. 4, 2021, DOI: 10.3390/s21041181.
27. Long Y., Liu Z., Hao C., MEMS Gyroscope Multi-Feature Calibration Using Machine Learning Technique, arXiv, 2024, DOI: 10.48550/arXiv.2410.07519.
28. Pan F., Zheng S., Yin Ch., MoE-Gyro: Self-Supervised Over-Range Reconstruction and Denoising for MEMS Gyroscopes, arXiv, 2024, DOI: 10.48550/arXiv.2506.06318.
29. Randall R.B., Tordon M.J., Data Acquisition, “Encyclopedia of Vibration”, 2001, 364-376, DOI: 10.1006/rwvb.2001.0142.
30. Mohammadi Z., Salarieh H., Investigating the effects of quadrature error in parametrically and harmonically excited MEMS rate gyroscopes, “Measurement”, Vol. 87, 2016, 152–175, 10.1016/j.measurement.2016.03.013.
31. Brisebois G., Op Amp Selection Guide for Optimum Noise Performance. Chapter 422, Analog Circuit Design 2015, Vol. 3, 907–908.
Identyfikacja i kompensacja błędów pomiarowych giroskopów: filtracja sygnałów na podstawie badań statycznych i dynamicznych inercyjnego systemu nawigacji
Streszczenie: Celem pracy była analiza identyfikacji błędów pomiarowych w giroskopach typu MEMS, które stanowią główne źródło danych dla bezwładnościowego systemu nawigacyjnego (INS) opracowanej rakiety. Badania skupiły się na analizie błędów przeprowadzając testy statyczne i dynamiczne, po których nastąpiła szczegółowa analiza danych pomiarowych prędkości kątowej również z lotu rakiety kierowanej do określonego punktu w przestrzeni. Celem badania było określenie i filtrowanie błędów pomiarowych giroskopu, takich jak bias, random walk i szum. Na podstawie wyników zaproponowano filtr adaptacyjny, który dostosowuje się do zmieniającej się dynamiki rakiety, umożliwiając skuteczniejszą kompensację tych błędów. W części końcowej przedstawiono wnioski, które zidentyfikowały niedociągnięcia w algorytmie i nakreśliły kierunki dalszych prac nad jego optymalizacją. Algorytm został zweryfikowany w warunkach statycznych, dynamicznych i rzeczywistych warunków lotu rakiety.
Słowa kluczowe: korekta błędów pomiarowych, żyroskopy MEMS, filtry adaptacyjne, nawigacja inercyjna, systemy nawigacji rakiet
Szymon Elert, MSc Eng. elerts@witu.mil.pl
ORCID: 0000-0003-2491-650X
Szymon Elert received his MSc degree in Military University of Technology in Warsaw in 2017. From the start of his career, he has been closely involved in rocket technology and the design of GNC systems. He is actively engaged in multiple projects, developing software for rockets, designing algorithms and preparing mathematical simulations.
Ocena skuteczności systemów ochrony cyberfizycznej z uwzględnieniem degradacji elektronicznych systemów zabezpieczeń
Jan Kapusta, Waldemar Bauer, Jerzy Baranowski AGH Akademia Górniczo-Hutnicza, Katedra Automatyki i Robotyki, Al. Mickiewicza 30, 30-059 Kraków
Streszczenie: W artykule zaproponowano stochastyczny model degradacji Elektronicznych Systemów Bezpieczeństwa w ramach Cyberfizycznych Systemów Ochrony. Model ma na celu zilustrowanie, jak na efektywność CPPS wpływają trzy główne grupy czynników: procesy starzenia się komponentów, kumulacja wiedzy i umiejętności adwersarzy oraz postęp technologiczny narzędzi atakujących, a także losowe zdarzenia związane z pojawianiem się nowych podatności i okresowe działania konserwacyjne. Każdy z tych elementów opisany został za pomocą odpowiedniego rozkładu – normalnego, logarytmicznego lub Bernoulliego – stanowiąc uproszczony, lecz reprezentatywny zestaw procesów degradacyjnych i regeneracyjnych. System efektywności SEi w miesiącu i definiowany jest jako max(100 − Xi, 0), gdzie Xi to skumulowane spadki i podniesienia efektywności. Dzięki symulacjom Monte Carlo (na zbiorze hipotetycznych danych i uproszczonych założeniach) pokazano ogólny kształt krzywej degradacji: system utrzymuje wysoką sprawność w pierwszych latach, po czym następuje przyspieszone obniżenie efektywności, z okresowymi, niewielkimi odbiciami związanymi z konserwacją. Modelowy przykład ilustruje, że klasyczne podejście EASI, nieuwzgledniające degradacji, znacząco przecenia odporność CPPS w długim horyzoncie czasowym. W rezultacie proponujemy uwzględnianie wskaźnika SEi w ocenie ryzyka oraz adaptacyjne harmonogramy utrzymania, które lepiej odpowiadają rzeczywistym procesom zużycia i zmian zagrożeń. Model ten, choć oparty na hipotetycznych założeniach, stanowi punkt wyjścia do dalszej kalibracji na rzeczywistych danych oraz do opracowania dynamicznych polityk modernizacji i konserwacji.
1. Wprowadzenie
Ochrona infrastruktury krytycznej to jeden z istotnych elementów bezpieczeństwa narodowego. Cyberfizyczne Systemy Ochrony CPPS (ang. Cyber-Physical Protection Systems) obejmują zestaw środków technicznych i informatycznych, architektonicznych, organizacyjnych i prawnych oraz usług ochrony osobowej, mających na celu zabezpieczenie zasobów organizacji przed zamierzonymi i przypadkowymi działaniami o nega-
Autor korespondujący: Waldemar Bauer, bauer@agh.edu.pl Artykuł recenzowany nadesłany 05.06.2025 r., przyjęty do druku 16.09.2025 r.
Słowa kluczowe: Elektroniczne Systemy Bezpieczeństwa, Cyberfizyczne Systemy Ochrony, model stochastyczny, degradacja systemów, efektywność operacyjna, symulacje Monte Carlo, adaptacyjna konserwacja, model EASI tywnym wpływie na stabilność organizacji, a w określonych okolicznościach na bezpieczeństwo państwa. W pracy skoncentrowano się na technicznych komponentach CPPS, zwanych Elektronicznymi Systemami Bezpieczeństwa ESS (ang. Electronic Security Systems). Budżety przeznaczone na zabezpieczenia stanowią istotne pozycje kosztowe, dlatego stosuje się metodyki i narzędzia oceny skuteczności PPS (ang. Physical Protection Systems), które w optymalnym przypadku dostarczają informacji o realnej efektywności systemów. W przeciwnym wypadku zarządzanie jest nieefektywne i może prowadzić do niegospodarności, a nawet do sytuacji, w której PPS może nie zrealizować celów przed nimi stawianymi. Natomiast brak realizacji zadań PPS może prowadzić do poważnych konsekwencji. Od wprowadzenia metodologii EASI (ang. Estimated Adversary Sequence Interruption) autorstwa Bennetta [1], model ten stał się punktem wyjścia dla licznych modyfikacji i rozszerzeń. Clem i Atkins [2] przeanalizowali scenariusze ataków fizyczno-cyfrowych, wskazując na potrzebę integracji ocen ryzyka cybernetycznego z metodami ochrony fizycznej. Porter [3] zbadał
Zezwala się na korzystanie z artykułu na warunkach licencji Creative Commons Uznanie autorstwa 4.0 Int.
rolę komponentu cyberbezpieczeństwa w ramach PPS, pokazując, jak zabezpieczenia sieciowe wpływają na odporność systemu. Depoy i wsp. [4] opracowali kompleksowe podejście do oceny ryzyka ataków łączących elementy fizyczne i cybernetyczne, uzupełniając klasyczne podejście EASI. Snell i Rivers [5] skupili się na atakach mieszanych (ang. blended attacks), demonstrując, jak uwzględnić ich specyfikę w ocenie skuteczności zabezpieczeń nuklearnych. Guo i wsp. [6] wykorzystali technikę cyfrowego bliźniaka do analizy ryzyka cybernetycznego w PPS elektrowni jądrowych, tworząc dedykowaną platformę testową. Bowen i wsp. [7] zaproponowali zintegrowaną platformę do analizy i projektowania PPS, umożliwiając kompleksową ocenę efektywności systemu w warunkach operacyjnych. Równolegle Ji i wsp. [8] rozszerzyli metodę EASI o analizę wielościeżkową z uwzględnieniem zmienności parametrów przy użyciu symulacji Monte Carlo. Kapusta i wsp. [9] ocenili cyberodporność PPS, wprowadzając heurystyczne algorytmy poprawy odporności systemów. O ile m.in. z tego powodu byliśmy w stanie sformalizować termin Cyberfizycznych Systemów bezpieczeństwa, który wydawał się niezbędny do opracowania podstaw modelu degradacji ww. systemów, o tyle, mimo tych zróżnicowanych propozycji, w literaturze nadal brakuje modelu uwzgledniającego rzeczywistą degradację PPS/CPPS w czasie ich eksploatacji. Degradację PPS/CPPS definiujemy jako negatywne zmiany w skuteczności elementów, wynikające z eksploatacji (np. obniżanie parametrów wraz z wiekiem) oraz zmian środowiskowych (np. pojawienie się nowych narzędzi ataku). Jako ilustrację problemu można przytoczyć przykład ochrony banków, gdzie ryzyko napadu znacząco spadło, a wzrosło ryzyko ataków na bankomaty (ATM), gdzie historycznie dominowały ataki fizyczne (kradzież kluczy, wiercenie, kradzież kaset z pieniędzmi). Natomiast współcześnie, z uwagi na wyższy poziom wiedzy i świadomości ryzyka u przeciwnika, w obszarze fizycznym dominują ataki z użyciem środków wybuchowych (przeważnie gaz ziemny) oraz ataki cyberfizyczne, co znacząco zwiększyło ryzyko i koszty zabezpieczeń, które należy dostosować do zmiany trendu w materializacji ryzyk.
Przegląd badań z zakresu inżynierii elektronicznej wskazał dwie główne grupy prac: Analiza starzenia się elementów elektronicznych była tematem wielu prac: dogłębna analiza struktury i mechanizmów degradacji kondensatorów elektrolitycznych, z wykorzystaniem charakterystyk materiałowych [10], badania symulacyjnie wpływu gorących nośników (ang. hot carrier) na wydajność konwerterów DC–DC, identyfikujące główne czynniki prowadzące do degradacji, [11] opracowany model niezawodności i wydajności konwertera Boost, określający, w jaki sposób zużycie komponentów wpływa na spadek parametrów [12], zaproponowany model degradacji pasywnych elementów w długoterminowej analizie emisji elektromagnetycznej, ze szczególnym uwzględnieniem wpływu starzenia się materiałów [13], przedstawiona metoda monitorowania punktu przegięcia charakterystyki VCE w IGBT, umożliwiająca wczesne wykrywanie degradacji przewodów [14], opisany szybki model strat dla tranzystorów GaN-FET oraz metoda kontroli wrażliwa na degradację transformatorów półprzewodnikowych [15].
Modele prognozowania degradacji: zaproponowana metoda estymacji pozostałego czasu życia systemów o dużych fluktuacjach degradacji [16], zastosowana statystyczna funkcja kopula (ang. copula) do analizy niezawodności systemów ze współzależnymi awariami [17],
przegląd podstaw uczenia przez wzmacnianie oraz ich zastosowań w optymalizacji decyzji dla systemów degradacyjnych [18], omówione p odejście wykorzystujące uczenie przez wzmacnianie do optymalizacji wydajności systemów ze sprzężeniem zwrotnym [19], zastosowana metoda cyfrowego bliźniaka do estymacji wskaźników zdrowia konwerterów DC–DC [20], połączenie cyfrowego bliźniaka z optymalizacją Bayesowską do identyfikacji parametrów degradacji przetwornic [21], diagnostyka usterek z użyciem głębokich zespołów sieciowych i wykrywania danych poza rozkładem [22], opracowany system monitorowania degradacji przetwornic mocy w czasie rzeczywistym za pomocą sieci neuronowej [23], zaproponowane ramy diagnostyczne oparte na nadzorowanym uczeniu dla systemów SMPS-AEC [24].
Żaden z tych modeli nie odnosi się bezpośrednio do degradacji ESS w kontekście CPPS. Opinie ekspertów dotyczące żywotności ESS wahają się od 5 do ponad 10 lat, a decyzje o wymianie zależą od dostępnego budżetu w zestawieniu z wartością księgową systemu. Brak dynamicznego, opartego na danych podejścia utrudnia efektywne zarządzanie cyklem życia CPPS. W reakcji na tę lukę proponujemy probabilistyczny model degradacji CPPS, uwzgledniający zarówno zużycie komponentów, jak i ewolucję zagrożeń i technologii. Niniejsza praca wprowadza następujące nowe elementy w zakresie modelowania i oceny efektywności omawianych w niej systemów: Dynamiczna metryka efektywności SEi, która pozwala na kwantyfikację stanu systemu ochronnego w każdym miesiącu eksploatacji, uwzględniając skumulowany wpływ pięciu zmiennych zdefiniowanych zmiennych probabilistycznych. Obejmują one kolejno: starzenie się komponentów, wzrost poziomu wiedzy przeciwnika, postęp technologiczny narzędzi atakujących, pojawianie się nowych podatności oraz kwartalne usprawnienia systemów — wszystkie parametryzowane na podstawie literatury i eksperckich rekomendacji.
Integracja z klasyczną metodyką EASI, umożliwiającą rozszerzenie oszacowań prawdopodobieństwa przerwania ataku o degradację systemu w czasie, co prowadzi do bardziej zachowawczych i realistycznych decyzji o konserwacji i wymianie sprzętu.
Realizacja symulacji Monte Carlo z N = 10 000 przebiegów, gwarantujących stabilność estymat średniej efektywności i odchyleń standardowych oraz pozwalających na analizę wrażliwości na poszczególne czynniki.
Studium przypadku demonstrujące praktyczne zastosowanie modelu: przypisanie różnych „wieków” do warstw/elementów ochrony oraz porównanie klasycznej i zmodyfikowanej oceny EASI, a następnie wykazanie różnic w wynikach oceny w różnym wieku eksploatacji.
Propozycja podstawy do opracowania lub modyfikacji polityk modernizacji, opartych nie tylko na amortyzacji finansowej, lecz także na analizie operacyjnej skuteczności.
Propozycja adaptacyjnych harmonogramów konserwacji i modernizacji, opartych na zebranych wynikach, które umożliwiają precyzyjniejsze planowanie interwencji serwisowych i optymalizację budżetu.
Propozycja otwartej implementacji, która pozwoli na dalszą kalibrację modelu na bazie rzeczywistych danych operacyjnych oraz rozwój nowych scenariuszy badawczych.
W dalszej części artykułu kolejno omówiono: w Sekcji 2. założenia i metodykę modelu, środowisko obliczeniowe oraz parametry probabilistyczne,
−w Sekcji 3. implementację wraz ze studium przypadku, −w Sekcji 4. prezentujemy wyniki i dyskusję, w Sekcji 5. wskazujemy kierunki dalszych badań i formułujemy wnioski.
2. Metodologia
A. Kluczowe komponenty i dobór parametrów
W wyniku analizy współczesnego środowiska bezpieczeństwa, obejmującego dynamicznie zmieniające się zagrożenia technologiczne, wzrost kompetencji adwersarzy oraz praktyki utrzymania działania systemów, zidentyfikowano następujące kluczowe czynniki wpływające na efektywność Cyberfizycznych Systemów Ochrony (CPPS), które jednocześnie wykazują istotną zmienność w czasie i generują niepewność w ocenie stanu systemu:
−starzenie się komp onentów, −wzrost poziomu wiedzy i umiejętności przeciwnika, tempo postępu technologicznego w narzędziach atakujących, pojawianie się nowych krytycznych podatności w systemach komputerowych, −regularne działania konserwacyjne i usprawnienia.
Wartości parametrów zostały dobrane arbitralnie w oparciu o ramy czasowe sugerowane przez ekspertów (5–10 lat cyklu życia ESS). Należy podkreślić, że przyjęte wartości stanowią punkt wyjścia do symulacji i mogą zostać zmodyfikowane na podstawie przyszłych badań oraz danych operacyjnych dotyczących poszczególnych elementów modelu. Jednocześnie przy doborze parametrów posiłkowano się również wynikami: eksperymentach przyspieszonego starzenia elektroniki [10], analizie tempa przyrostu wiedzy i narzędzi atakujących [4, 8], raportach branżowych nt. wdrażania usprawnień w przemyśle obronnym [6].
B. Ogólna formuła modelu
Efektywność systemu w miesiącu i definiujemy jako: 1 max(100,0), ( ). ii i ijjjjj j
gdzie:
SEi efektywność CPPS w miesiącu i, wyrażona w pro centach; Xi skumulowany spadek efektywności do miesiąca i (punkty procentowe); AGj wpływ starzenia się komp onentów w miesiącu j; KGj wpływ wzrostu poziomu wiedzy i umiejętności przeciwnika w miesiącu j; TI j wpływ postępu technologicznego narzędzi atakujących w miesiącu j;
VIj wpływ po jawienia się nowych krytycznych podatności w miesiącu j;
IE j efekt kwartalnych usprawnień (konserwacji) w miesiącu j, redukujący Xi
Zastosowanie funkcji
w opracowanym modelu
max()
max(100,0)ii SE X =−
Jan Kapusta, Waldemar Bauer, Jerzy Baranowski
zapewnia, że efektywność systemu nigdy nie przyjmuje wartości ujemnych. Formalnie interpretujemy SEi = 0 jako całkowitą utratę zdolności ochronnych CPPS, co odpowiada sytuacji, w której dalsza degradacja nie ma praktycznego znaczenia (system już jest nieskuteczny).
W przyjętym modelu zastosowaliśmy następujące rodzaje rozkładów do modelowania wpływu zdefiniowanych wcześniej zmiennych: Rozkład normalny dla AGj i KGj: Starzenie się komponentów oraz wzrost poziomu wiedzy adwersarzy są wynikiem sumy wielu niewielkich, niezależnych zdarzeń (mikrouszkodzeń lub zdobycia małych porcji informacji). Zgodnie z centralnym twierdzeniem granicznym naturalny jest wybór rozkładu normalnego, którego parametry (,) µσ odzwierciedlają średni trend i zmienność tych procesów.
Model logarytmiczny dla TI j: Postęp technologiczny często przyspiesza na początku rozwoju narzędzi, a w miarę dojrzewania technologii kolejne usprawnienia dają coraz mniejsze przyrosty efektywności. Funkcja logarytmiczna odwzorowuje tę cechę „malejących przychodów” przy stałym wzroście nakładów na badania i rozwój.
Proces Bernoulliego dla VIj: Nowe, krytyczne podatności pojawiają się rzadko i losowo, ale ich konsekwencje są skokowe. Model Bernoulliego z parametrem p oddaje prawdopodobieństwo wystąpienia takiego zdarzenia w danym miesiącu, a jednorazowy „skok” spadku efektywności odpowiada jego wpływowi.
Rozkład normalny dla IE j: Kwartalne prace konserwacyjne składają się z wielu drobnych zadań (testy, wymiana części). Ich łączny efekt ma charakter sumaryczny, z naturalną zmiennością wynikającą z zakresu i jakości wykonanych prac, gdzie ponownie centralne twierdzenie graniczne wskazuje na rozkład normalny.
Pamiętając o estymowanym przez ekspertów na około 10–12 lat cyklu życia systemu, wsp omaganym przez wyniki badań, przyjęto następujące wartości parametrów rozkładów: Starzenie się komponentów (AGj): modelowane rozkładem normalnym (μ = 0,5, σ = 0,15), co odzwierciedla średni spadek sprawności o około 50 % w dekadzie (rozrzut ±15 %) [10, 11].
Wzrost poziomu wiedzy przeciwnika (KGj): rozkład normalny (μ = 0,1, σ = 0,03) – odpowiada około 10 % rocznemu przyrostowi skuteczności ataków dzięki lepszemu planowaniu i dostępowi do wiedzy [4].
Postęp technologiczny (TI j): model logarytmiczny (μ = 0,7, σ = 0,21) – odzwierciedla przyspieszone tempo innowacji w narzędziach przeciwnika, gdzie kolejne usprawnienia przynoszą coraz mniejszy przyrost wydajności [6].
Wpływ podatności (VIj): proces Bernoulliego (p = 0,2 – prawdopodobieństwo sukcesu zdefiniowany jako jednorazowy spadek = 10 %) — reprezentuje pojawienie się nowych, krytycznych luk z historyczną częstością około 1 na 5 miesięcy [8].
Efekty kwartalnych usprawnień ( IE j): rozkład normalny (μ = 0,5, σ = 0,15) – mo deluje prewencyjne działania konserwacyjne (testy, wymiana części) co 3 miesiące, redukujące skumulowany spadek efektywności o średnio 50 % z odchyleniem ±15 %.
Uzasadnienie wyboru rozkładów
Dobór rozkładów probabilistycznych dla poszczególnych zmiennych został oparty na charakterystyce procesów, które reprezentują, oraz na przesłankach literaturowych: AG (starzenie komponentów) — rozkład normalny. Starzenie jest efektem sumy wielu drobnych, w dużej mierze niezależnych mikro zjawisk (zużycie materiałów, dryf
parametrów), co uzasadnia wybór rozkładu normalnego. Por. wskazania literaturowe dotyczące degradacji elementów elektronicznych [10, 11].
KG (wzrost poziomu wiedzy przeciwnika) – rozkład normalny Akumulacja wiedzy i umiejętności następuje przyrostowo, z naturalną zmiennością w tempie i jakości pozyskiwanych danych, co uzasadnia wybór modelowania normalnego.
TI (postęp technologiczny narzędzi ataku) – model logarytmiczny. W początkowych fazach rozwoju narzędzi obserwuje się szybkie przyrosty efektywności, które następnie maleją (ang. diminishing returns). Funkcja logarytmiczna dobrze oddaje tę dynamikę. Por. dyskusję i przykłady trendów technologicznych w kontekście PPS/CPPS [6].
VI (pojawianie się nowych krytycznych podatności) – proces Bernoulliego. Zdarzenia rzadkie, skokowe, o trudnej do przewidzenia częstości w krótkich horyzontach (np. zero-day). W modelu ujmowane jako wystąpienie/brak zdarzenia w danym miesiącu. Por. podejścia do zmienności scenariuszy i ryzyka [4, 8]. IE (efekt kwartalnych usprawnień/konserwacji) – rozkład normalny. Łączny efekt wielu czynności serwisowych (testy, wymiany, strojenie), z naturalną zmiennością zakresu i jakości prac — uzasadnia to modelowanie sumarycznego efektu rozkładem normalnym.
Powyższe wybory wpisują się w ogólny paradygmat, gdzie rozkłady sumy drobnych oddziaływań (AG, KG, IE) opisujemy przy użyciu rozkładu normalnego, proces który można opisać jako rzadko występujące lub nie(VI) — rozkładem Bernoulliego, a TI odwzorowujemy rozkładem logarytmicznym.
C. Środowisko obliczeniowe
Model został zaimplementowany w języku Python, co umożliwiło wykorzystanie nowoczesnych bibliotek do obliczeń numerycznych i wizualizacji wyników. W szczególności: numpy – podstawowa biblioteka do przechowywania i realizowania wektoryzowanych obliczeń na wielowymiarowych tablicach danych, zapewniająca wydajność zbliżoną do kodu C/C++.
scipy.stats – moduł do statystycznego modelowania rozkładów prawdopodobieństwa; stosowany do generowania próbek z rozkładów normalnego, Bernoulliego oraz obliczania funkcji gęstości i dystrybuant. matplotlib – biblioteka do tworzenia wizualizacji: wykresów liniowych przebiegów degradacji, histogramów rozkładów parametrów oraz linii trendu; umożliwia eksport do formatów PDF, PNG i SVG.
Liczba powtórzeń Monte Carlo (N) – w realizowanych symulacjach przyjęto N = 10 000 niezależnych przebiegów. Taka liczba gwarantuje, że oszacowania średniej efektywności i odchyleń standardowych są stabilne, przy akceptowalnym czasie obliczeń. Zgodnie z prawem wielkich liczb błąd standardowy estymowanej średniej maleje w tempie 1/, N co dla N = 10 000 skutkuje rzędem wielkości około 1 %, dając wiarygodne wyniki.
Na początku każdej symulacji zostało ustawione ziarno losowości (ang. seed), dzięki czemu sekwencja liczb pseudolosowych jest powtarzalna, co jest niezbędne do rzetelnej walidacji modelu oraz porównywania różnych scenariuszy testowych.
Rys. 1. Miesięczna ewolucja efektywności CPPS (niebieska linia) w ciągu dziesięciu lat (120 miesięcy) z linią trendu (czerwona), wskazującą spadek z 96 % do 25 %. Kolorowe linie przerywane przedstawiają składowe probabilistyczne: wpływ starzenia (pomarańczowa), wzrost poziomu wiedzy adwersarzy (zielona), postęp narzędzi atakujących (różowa), skokowe podatności (fioletowa) oraz kwartalne usprawnienia (brązowa). Starzenie i kumulacja wiedzy dominują długoterminową degradację, podatności generują nagłe spadki, a działania konserwacyjne dają jedynie krótkotrwałe odbicia
Fig. 1. Monthly evolution of CPPS effectiveness (blue) over a ten-year (120-month) horizon, with a linear trend line (red) illustrating the overall decline from about 96 % to 25 %. The colored dashed lines show the individual stochastic contributions: aging impacts (orange), adversary knowledge growth (green), tool improvements (pink), vulnerability impacts (purple) and quarterly improvement effects (brown). Note how aging and knowledge growth drive the longterm downward trend, vulnerability spikes cause sudden drops, and maintenance interventions yield only minor temporary recoveries
Przy tak zdefiniowanych parametrach symulacji graficznej jej reprezentację można zobaczyć na wykresie, który pokazuje, jak kolejne czynniki degradacji wpływają na osłabienie skuteczności działania systemu, reprezentowaną przez liniowo opadającą czerwoną linię trendu (Rys. 1.)
3. Przykład użycia
Aby zilustrować zastosowanie opracowanego modelu degradacji CPPS, rozważono typową ścieżkę ataku na obiekt chroniony, którego charakterystyka składa się z czterech kolejnych warstw ochronnych:
Ochrona obwodowa – sensometryczny przewód światłowodowy monitorujący linię ogrodzenia, Nadzór wizyjny – kamery CCTV nadzorujące obszar chroniony, Kontrola dostępu – czytniki transponderów RFID oraz czujniki otwarcia (kontaktrony), System Sygnalizacji Włamania – pasywne czujki po dczerwieni (PIR) wykrywające ruch wewnątrz obiektu. Każdemu z tych elementów przypisano przykładowy „wiek”: −przewód sensometryczny – 2 lata, −kamery CCTV – 7 lat, −czujniki otwarcia drzwi – 5 lat, −czujki PIR – 10 lat.
W oparciu o zaproponowany model obliczono dla każdego elementu wartość efektywności SEi odpowiadającą aktualnemu wiekowi urządzenia. Następnie wykonano dwie oceny efektywności systemu CPPS atak wybraną wcześniej ścieżką.
A. Ocena klasyczna (EASI bez degradacji)
W klasycznym podejściu EASI założono nominalne prawdopodobieństwa detekcji (PDi) i transmisji alarmu (PCi) bez uwzględniania upływu czasu ani degradacji. Kumulatywne prawdopodobieństwo przerwania ataku P(I) wyliczane jest według równania:
gdzie: DTi P – prawdopodobieństwo detekcji podczas i akcji przeciwnika między warstwami zabezpieczenia; PCi – prawdopodobieństwo skutecznej komunikacji z siłami reagowania; (|) RAi P – warunkowe prawdopodobieństwo skutecznej odpowiedzi sił reagowania zanim adwersarz osiągnie swój cel i jest równe P(X > 0), gdzie X oznacza pozostały czas do ukończenia ataku (TR) pomniejszonego o pozostały czas do skutecznej reakcji sił reagowania (RTF) (Rys. 2).
B. Ocena z uwzględnieniem degradacji
W zmodyfikowanej ocenie każdy nominalny współczynnik detekcji PDi został przemnożony przez SEi, czyli efektywność danej warstwy, wynikającą z jej wieku i stopnia degradacji. Dzięki temu prawdopodobieństwo przerwania ataku maleje wraz ze starzeniem się elementów ochronnych (Rys. 3).
Na podstawie porównania obu ocen widać, że uwzględnienie degradacji obniża szacunki skuteczności CPPS o dodatkowe 15–25 punktów procentowych już po pięciu latach eksploatacji. Jest to istotna wskazówka dla praktyków, sugerująca potrzebę częstszej wymiany lub modernizacji kluczowych komponentów ochronnych.
4. Wyniki i dyskusja
Wykresy na Rys. 1 wskazują, że efektywność systemu (niebieska linia) obniża się z około 98 % na początku symulacji do około 25 % po 120 miesiącach. Czerwona linia trendu pokazuje niemal liniowy spadek z 98 % do 25 % w ciągu dziesięciu lat.
Rys. 2. Zrzut ekranu arkusza EASI w Excelu przedstawiającego ocenę skuteczności CPPS na hipotetycznej ścieżce przeciwnika bez uwzględnienia czynnika degradacji skuteczności. Prawdopodobieństwo przerwania ścieżki ataku przez siły reagowania wynosi ≈ 88,64 %
Fig. 2. A screenshot of the EASI Excel tool showing the evaluation of CPPS effectiveness on a hypothetical adversary path, without incorporating the degradationbased effectiveness factor. The result indicates ≈ 88.64 % probability of interrupting the adversary sequence
Rys. 3. Zrzut ekranu arkusza EASI w Excelu przedstawiającego ocenę skuteczności CPPS na hipotetycznej ścieżce przeciwnika z uwzględnieniem czynnika degradacji skuteczności. W tym scenariuszu wynik wskazuje na spadek skuteczności systemu o 12,45 % z około 88,64 % do około 76,19 % prawdopodobieństwa przerwania ataku adwersarza
Fig. 3. A screenshot of the EASI Excel tool showing the evaluation of CPPS effectiveness on a hypothetical adversary path, incorporating the degradationbased effectiveness factor. In this scenario, the result indicates a 12.45 % decrease in system effectiveness, from approximately 88.64 % to about 76.19 % probability of interrupting the adversary sequence
A. Moment przekroczenia 50 %
Chociaż pojedyncze realizacje modelu (niebieska linia) czasem schodzą poniżej 50 % już po 60 miesiącach, średnia tendencja (linia trendu) wskazuje, że poziom 50 % zostaje przekroczony dopiero około 75–80 miesiąca (6,5–6,7 roku). Oznacza to, że w rozważanym scenariuszu typowy cykl wymiany CPPS krótszy niż 7 lat byłby uzasadniony, jeżeli chcemy utrzymać skuteczność powyżej połowy wartości nominalnej.
B. Dominujące czynniki degradacji
Analiza poszczególnych składników Xi (pomarańczowa, zielona, fioletowa, magenta i brązowa linia) pokazuje wyraźne, nierówne udziały:
Starzenie się (AGj, pomarańczowa) rośnie liniowo od 0 do około 60–80 % w dekadzie i stanowi największy udział w skumulowanym spadku.
Wzrost poziomu wiedzy przeciwnika (KGj, zielona) narasta stopniowo od 0 do około 10–15 % w ciągu dziesięciu lat.
Udoskonalanie narzędzi (TI j, fioletowa) przyspiesza w drugiej połowie okresu i zbliża się do około 8–10 %.
Po datności (VIj, magenta) dają sporadyczne skoki spadku do 5–10 %, ale są rzadkie (średnio jeden na pięć miesięcy).
Efekty konserwacji (IE j, brązowa) pojawiają się kwartalnie i mają niewielką wartość – rzędu 1–2 % regeneracji na cykl, co jest niewystarczające, by skompensować skumulowane straty.
C. Porównanie klasycznej i zmodyfikowanej EASI
Dane na rysunkach 2 i 3 dowodzą, że uwzględnienie SEi w metodzie EASI obniża estymowane prawdopodobieństwo przerwania ataku o dodatkowe 15–25 % już w piątym roku użytkowania. W klasycznym podejściu (bez degradacji) CPPS wygląda na relatywnie znacznie bardziej odporne, co może prowadzić do błędnych decyzji, w tym o zbyt rzadkiej wymianie sprzętu.
D. Implikacje praktyczne
W świetle otrzymanych wyników słuszne wydaje się rozważenie uwzględnienia działań zaradczych: wprowadzenie ciągłego monitorowania efektywności i predykcji degradacji, adaptacyjne harmonogramy konserwacji, które uwzględniają rzeczywiste tempo zużycia i zmienność zagrożeń.
E. Ograniczenia i dalsze prace
Prezentowany model wymaga kalibracji na danych z rzeczywistych instalacji CPPS, zwłaszcza w odniesieniu do kwartalnych efektów konserwacji i częstotliwości występowania krytycznych podatności. Dopiero wówczas będzie możliwe opracowanie precyzyjnych, ekonomicznie zoptymalizowanych harmonogramów konserwacji i wymiany komponentów.
5. Podsumowanie i perspektywy dalszych badań
W pracy zaproponowano kompleksowy, probabilistyczny model degradacji Cyberfizycznych Systemów Ochrony, który łączy w sobie pięć kluczowych czynników — starzenie się komponentów, wzrost poziomu wiedzy przeciwnika, postęp technologiczny narzędzi atakujących, pojawianie się nowych podatności oraz prewencyjne działania konserwacyjne. Przeprowadzone symulacje wykazały, że w analizowanym hipotetycznym scenariuszu efektywność CPPS spada poniżej 50 % w horyzoncie 6,5–7 lat, co sugeruje konieczność rewizji standardowych, dziesięcioletnich cykli wymiany sprzętu i wdrożenia bardziej elastycznych harmonogramów odnowy systemów. Analiza wrażliwości pokazała, że to właśnie starzenie się komponentów oraz sporadyczne, ale gwałtowne skoki związane z wykrywaniem nowych podatności generują największe ryzyko długoterminowej nieskuteczności ochrony, podczas gdy kwartalne przeglądy zapewniają jedynie krótkotrwałe i niewystarczające ożywienie efektywności.
Obecny model bazuje na założeniu o niezależności zmiennych degradacyjnych (AG, KG, TI, VI, IE), co jest świadomym uproszczeniem, wprowadzonym ze względu na brak danych i badań z zakresu zależności między parametrami oraz ich naturą. W rzeczywistości zależności te mogą być istotne — przykładowo, szybki postęp technologiczny narzędzi ataku (TI) może przyspieszać wzrost wiedzy przeciwnika (KG), a równoczesna intensyfikacja TI i KG może zwiększać prawdopodobieństwo ujawnienia nowych podatności (VI). W przyszłych badaniach planowane jest rozszerzenie modelu o odwzorowanie takich relacji z wykorzystaniem statystycznej funkcji kopula (ang. statistical copula), która umożliwia definiowanie rozkładów brzegowych poszczególnych zmiennych niezależnie od struktury ich współzależności, umożliwiając uchwycenie nieliniowych oraz asymetrycznych zależności, a także efektów skrajnych (ang. tail dependence). Rozważane są m.in. kopule typu Gumbela (nacisk na zależności w górnych ogonach rozkładów), Claytona (w dolnych ogonach) oraz Franka (symetryczne zależności), co pozwoli lepiej odwzorować zachowanie systemu w warunkach dynamicznych [25, 26].
Integracja wskaźnika efektywności SEi z klasycznym modelem EASI umożliwiła uzyskanie bardziej realistycznych i konserwatywnych estymat prawdopodobieństwa przerwania ataku, obniżając je o dodatkowe 15–25 % już po pięciu latach eksploatacji. Taka modyfikacja wydaje się być istotna z punktu widzenia planowania budżetowego i zabezpieczenia ciągłości działań ochronnych.
W obecnej wersji modelu działania konserwacyjne (IE j) zostały ujęte jako przegląd kwartalny schematycznych przeglądów technicznych o stałej skuteczności. W rzeczywistości intensywność, zakres i moment przeprowadzenia konserwacji mogą być silnie zróżnicowane w zależności od kontekstu operacyjnego, charakterystyki obiektu oraz dostępnych zasobów. W kolejnych etapach planowane jest wprowadzenie elastycznego modelu konserwacji, w którym harmonogram i skuteczność interwencji będą modelowane jako zmienne losowe o rozkładach dopasowanych empirycznie na podstawie danych eksploatacyjnych. Rozwiązanie to pozwoli odwzorować scenariusze od reaktywnej konserwacji awaryjnej po prewencyjne działania predykcyjne, a także umożliwi analizę koszt–efektywność dla różnych strategii utrzymaniowych.
Jako naturalną kontynuację tych badań proponujemy cztery główne obszary rozwoju. Po pierwsze, w zakresie innowacji technologicznych warto zbadać wykorzystanie algorytmów sztucznej inteligencji i uczenia maszynowego do predykcji krytycznych momentów degradacji, a także eksperymenty z technologią blockchain dla zapewnienia niezmienności i audytowalności danych pomiarowych. Integracja czujników IoT nowej generacji, takich jak urządzenia akustyczne czy termowizyjne, pozwoli natomiast na wczesne wykrywanie oznak zużycia.
Po drugie, rekomendujemy opracowanie dynamicznych polityk i regulacji, które na bieżąco aktualizują wymagania techniczne CPPS w oparciu o wskaźniki degradacji i ryzyka. Zasadnym wydaje się również rozważenie współpracy międzynarodowej nad ujednoliceniem progów efektywności i cykli zżycia systemów ochrony oraz analizę wpływu lokalnych norm. Tego rodzaju podejście mogłoby wzmocnić spójność praktyk utrzymania i modernizacji.
Po trzecie, zasadne jest pogłębienie badań nad strategiami organizacyjnymi. Wdrożenie kultury proaktywnej konserwacji wymaga zarówno szkoleń technicznych dla personelu, jak i wsparcia ze strony kadry zarządzającej, a także analiz międzysektorowych, które wskażą najlepsze praktyki w branżach takich jak finanse, energetyka czy transport.
Wreszcie, kluczowe znaczenie wydają się mieć badania longitudinalne. Wieloletnie gromadzenie rzeczywistych danych eksploatacyjnych z instalacji CPPS, w tym pomiarów efektywności po każdej interwencji serwisowej, oraz połączenie
ich z analizą ekonomiczną kosztów konserwacji, modernizacji i ryzyka awarii. Taka baza danych umożliwi precyzyjną kalibrację modelu w różnych warunkach środowiskowych (temperatura, wilgotność, natężenie ruchu) i pozwoli na regionalizację zaleceń dotyczących utrzymania.
Podsumowując, zaproponowany model stanowi solidną podstawę do przejścia od statycznych harmonogramów wymiany narzędzi ochronnych do dynamicznych, opartych na danych i analizie ryzyka procesów utrzymaniowych. Kolejnym krokiem będzie implementacja prototypu w rzeczywistych systemach CPPS, walidacja jego predykcji wobec danych operacyjnych oraz rozszerzenie o aspekty cyberbezpieczeństwa i zaawansowanej sensoryki IoT, co znacząco wzmocni odporność infrastruktury krytycznej na coraz bardziej złożone i zmienne zagrożenia.
Bibliografia
1. Bennett H.A., EASI approach to physical security evaluation, United States, Tech. Rep. SAND–76-0500, 1977.
3. Porter S., Physical protection systems and the cyber security component, no. llnl-conf-674448, Lawrence Livermore National Lab.(LLNL), Livermore, CA (United States), Tech. Rep., 2015.
4. Depoy J., Phelan J., Sholander P., Smith B., Varnado G., Wyss G., Risk assessment for physical and cyber attacks on critical infrastructures, [In:] MILCOM 2005 – 2005 IEEE Military Communications Conference, IEEE, 2005, DOI: 10.1109/MILCOM.2005.1605959.
5. Snell M.K., Rivers J., The treatment of blended attacks in nuclear security effectiveness assessments, Sandia National Lab.(SNL-NM), Albuquerque, NM (United States), Tech. Rep., 2015.
6. Guo Y., Yan A., Wang J., Cyber security risk analysis of physical protection systems of nuclear power plants and research on the cyber security test platform using digital twin technology, [In:] 2021 International Conference on Power System Technology (POWERCON), IEEE, 2021, DOI: 10.1109/POWERCON53785.2021.9697764.
7. Bowen Z., Ming Y., Hidekazu Y., Hongxing L., Evaluation of physical protection systems using an integrated platform for analysis and design, “IEEE Transactions on Systems, Man, and Cybernetics: Systems”, Vol. 47, No. 11, 2017, 2945–2955, DOI: 10.1109/TSMC.2016.2531995.
8. Andiwijayakusuma D., Setiadipura T., Purqon A., Su’ud Z., The development of EASi-based multi-path analysis code for nuclear security system with variability extension, “Nuclear Engineering and Technology”, Vol. 54, No. 10, 2022, 3604–3613, DOI: 10.1016/j.net.2022.05.023.
9. Kapusta J., Bauer W., Baranowski J., Evaluation of the effectiveness of physical protection systems with consideration of its cyber-resilience, [In:] 2023 27th International Conference on Methods and Models in Automation and Robotics (MMAR), 2023, 457–461, DOI: 10.1109/MMAR58394.2023.10242420.
10. Narale S.B., Verma A., Anand S., Structure and degradation of aluminum electrolytic capacitors, [In:] 2019 National Power Electronics Conference, NPEC 2019, DOI: 10.1109/NPEC47332.2019.9034726.
11. Yu C., Jiang L., Yuan J., Study of performance degradations in DC–DC converter due to hot carrier stress by simulation, Microelectronics Reliability, Vol. 46, No. 9–11, 2006, 1840–1843, DOI: 10.1016/j.microrel.2006.07.079.
12. Alam M.K., Khan F.H., Reliability analysis and performance degradation of a boost converter, [In:] 2013 IEEE
Jan Kapusta, Waldemar Bauer, Jerzy Baranowski
Energy Conversion Congress and Exposition, ECCE 2013, 5592–5597, DOI: 10.1109/ECCE.2013.6647461.
13. Huang H., Boyer A., Dhia S.B., Analysis and modeling of passive device degradation for a long-term electromagnetic emission study of a DC-DC converter, “Microelectronics Reliability”, Vol. 55, No. 9–10, 2015, 2061–2066, DOI: 10.1016/j.microrel.2015.06.058.
14. Singh A., Anurag A., Anand S., Evaluation of Vce at inflection point for monitoring bond wire degradation in discrete packaged IGBTs, “IEEE Transactions on Power Electronics”, Vol. 32, No. 4, 2017, 2481–2484, DOI: 10.1109/TPEL.2016.2621757.
15. Haque M.S., Moniruzzaman M., Choi S., Kwak S., Okilly A.H., Baek J., A fast loss model for cascode GaN-FETs and real-time degradation-sensitive control of solid-state transformers, “Sensors”, Vol. 23, No. 9, 2023, DOI: 10.3390/s23094395.
16. Du D.-B., Zhang J.-X., Zhou Z.-J., Si X.-S., Hu C.-H., Estimating remaining useful life for degrading systems with large fluctuations, “Journal of Control Science and Engineering”, 2018, DOI: 10.1155/2018/9182783.
17. Fang G., Pan R., Hong Y., Copula-based reliability analysis of degrading systems with dependent failures, “Reliability Engineering & System Safety”, Vol. 193, 2020, DOI: 10.1016/j.ress.2019.106618.
18. Dong H., Ding Z., Zhang S., Deep reinforcement learning: Fundamentals, research and applications, Springer, 2020, DOI: 10.1007/978-981-15-4095-0.
19. Hua C., Reinforcement Learning Aided Performance Optimization of Feedback Control Systems, Springer, 2021, DOI: 10.1007/978-3-658-33034-7.
Evaluation of the
20. Peng Y., Zhao S., Wang H., A digital twin based estimation method for health indicators of DC–DC converters, “IEEE Transactions on Power Electronics”, Vol. 36, No. 2, 2021, 2105–2118, DOI: 10.1109/TPEL.2020.3009600.
21. Chen S., Wang S., Wen P., Zhao S., Digital twin for degradation parameters identification of DC–DC converters based on Bayesian optimization, [In:] 2021 IEEE International Conference on Prognostics and Health Management, ICPHM 2021, 2021, DOI: 10.1109/ICPHM51084.2021.9486446.
22. Han T., Li Y.-F., Out-of-distribution detection-assisted trustworthy machinery fault diagnosis approach with uncertainty-aware deep ensembles, “Reliability Engineering and System Safety”, Vol. 226, 2022, DOI: 10.1016/j.ress.2022.108648.
23. Fan J., Lee J., Jung I., Lee Y., Online monitoring of power converter degradation using deep neural network, “Applied Sciences”, Vol. 11, No. 24, 2021, DOI: 10.3390/app112411796.
24. Kareem A.B., Hur J.-W., Towards data-driven fault diagnostics framework for SMPS-AEC using supervised learning algorithms, “Electronics”, Vol. 11, No. 16, 2022, DOI: 10.3390/electronics11162492.
25. Nelsen R.B., An Introduction to Copulas, Springer, 2006, DOI: 10.1007/0-387-28678-0.
26. Fang G., Pan R., Hong Y., Copula-based reliability analysis of degrading systems with dependent failures, “Reliability Engineering & System Safety”, Vol. 193, 2020, DOI: 10.1016/j.ress.2019.106618.
Effectiveness of Cyber-Physical Protection Systems Considering the Degradation of Electronic Security Systems
Abstract: This paper introduces a stochastic degradation model for Electronic Security Systems (ESS) within Cyber-Physical Protection Systems (CPPS). The model demonstrates how CPPS effectiveness is influenced by three major groups of factors: component aging processes, accumulation of adversary knowledge and skills, and technological advancements in attack tools, along with random vulnerability events and periodic maintenance actions. Each factor is represented by an appropriate distribution such as normal, logarithmic, or Bernoulli, providing a simplified yet representative set of degradation and recovery processes. System effectiveness SEi in month i is defined as max(100 − Xi, 0), where Xi aggregates the cumulative declines and improvements. Monte Carlo simulations (using hypothetical data and assumptions) reveal a characteristic degradation curve: high initial performance followed by accelerated decline, punctuated by minor recoveries due to maintenance. A case study indicates that the traditional EASI approach, which neglects degradation, substantially overestimates CPPS resilience over long time horizons. Consequently, we advocate incorporating the SEi metric into risk assessments and adopting adaptive maintenance schedules better aligned with real-world wear and evolving threats. Although based on hypothetical parameters, this model provides a foundation for calibration with operational data and for developing dynamic modernization and upkeep policies.
Keywords: Electronic Security Systems, Cyber-Physical Protection Systems, stochastic degradation model, system effectiveness, Monte Carlo simulation, adaptive maintenance, EASI extension, operational resilience
mgr inż. Jan Kapusta jkapusta@agh.edu.pl
ORCID: 0000-0003-4523-1227
Ma ponad 20-letnie doświadczenie zawodowe w obszarze bezpieczeństwa w sektorze prywatnym. Obecnie pełni funkcję Menedżera ds. Ryzyka i Bezpieczeństwa Operacyjnego dla regionu Europy Północnej, Centralnej i Wschodniej, w tym krajów Wspólnoty Niepodległych Państw (WNP) w globalnej korporacji IT. Był współzałożycielem i przewodniczącym Forum Bezpieczeństwa Fizycznego działającego przy Radzie ds. Bezpieczeństwa Związku Banków Polskich, a także reprezentował polski sektor bankowy w grupie roboczej ds. bezpieczeństwa w Europejskiej Federacji Bankowej. Ukończył studia z zakresu Bezpieczeństwa Systemów Komputerowych i Zarządzania Kryzysowego, a także posiada dyplom poziomu 6 IQ jako Certyfikowany Specjalista ds. Zarządzania Bezpieczeństwem, nadany przez International Security Management Institute. Jest wykładowcą przedmiotu Bezpieczeństwo Systemów Cyberfizycznych na Akademii Górniczo-Hutniczej oraz członkiem rady programowej i instruktorem w Centrum Szkoleniowym Polskiej Izby Systemów Alarmowych. Obecnie kończy studia doktoranckie.
dr inż. Waldemar Bauer bauer@agh.edu.pl
ORCID: 0000-0002-8543-0995
Ukończył studia magisterskie na kierunku informatyka oraz uzyskał stopień doktora nauk technicznych w dziedzinie automatyki i robotyki na Akademii Górniczo-Hutniczej w Krakowie, odpowiednio w 2012 r. i 2020 r. Obecnie pracuje jako adiunkt w Katedrze Automatyki i Robotyki AGH w Krakowie. Jego zainteresowania badawcze obejmują analizę danych, uczenie maszynowe, optymalizację, cyfryzację procesów biznesowych, teorię sterowania, metody numeryczne oraz diagnostykę procesów.
prof. dr hab. inż. Jerzy Baranowski jb@agh.edu.pl
ORCID: 0000-0003-3313-581X
Ukończył studia magisterskie, doktoranckie oraz habilitacyjne w dziedzinie automatyki i robotyki na Akademii Górniczo-Hutniczej w Krakowie w latach 2006, 2010 i 2017. W 2024 r. otrzymał tytuł profesora nadany przez Prezydenta RP. Obecnie pracuje jako profesor zwyczajny w Katedrze Automatyki i Robotyki AGH w Krakowie. Kieruje Laboratorium Informatyki w Zakładzie Sterowania i Zarządzania. Jest autorem ponad 200 publikacji, w tym książki, artykuły naukowe i referaty konferencyjne. Otrzymał stypendium dla najlepszych młodych naukowców oraz Medal Komisji Edukacji Narodowej przyznane przez Ministerstwo Nauki i Szkolnictwa Wyższego. Jego zainteresowania naukowe obejmują diagnostykę procesów, predykcyjne utrzymanie ruchu, systemy wspomagania decyzji, wnioskowanie statystyczne, teorię sterowania oraz efektywne metody obliczeniowe.
Jacek Szklarski 1, Ela Zawidzka 1, Tomasz Ponikiewski 2, Machi Zawidzki 1, 3
1 Instytut Podstawowych Problemów Techniki PAN, Adolfa Pawińskiego 5B, 02-106 Warszawa
2 Politechnika Śląska, Wydział Budownictwa, ul. Akademicka 5, 44-100 Gliwice
3 Sieć Badawcza Łukasiewicz – Przemysłowy Instytut Automatyki i Pomiarów PIAP, Al. Jerozolimskie 202, 02-486 Warszawa
Streszczenie: Arm-Z to koncepcja hiper-redundantnego manipulatora robotycznego składającego się z identycznych modułów o jednym stopniu swobody (1-DOF) i realizującego dowolne ruchy końcówką w przestrzeni roboczej. Dwie zasadnicze zalety Arm-Z to oszczędność (dzięki masowej produkcji identycznych elementów) oraz odporność na awarie (zepsute moduły mogą być łatwo zastąpione). Z drugiej strony, sterowanie tak bardzo nieliniowym systemem jest znacznie trudniejsze niż typowym manipulatorem przemysłowym i wymaga zastosowania odpowiednich technik optymalizacyjnych. W artykule przedstawiono wstępne wyniki implementacji autorskiego algorytmu opartego na metodzie gradientu prostego do znajdowania trajektorii przejścia między zadanymi stanami Arm-Z. Przykładowym zadaniem dla manipulatora jest bezpieczne wejście do przestrzeni roboczej, inspekcja zadanych pięciu punktów oraz bezpieczne opuszczenie przestrzeni roboczej. Ten eksperyment jest trójwymiarową wersją realizowanej wcześniej inspekcji dwuwymiarowej.
Słowa kluczowe: Arm-Z, manipulator hiper-redundantny, inspekcja
1. Wstęp
Trąba słonia oraz wąż są przykładami niezwykłego przystosowania do różnego rodzaju środowisk. Ta cecha wynika z wysokiej redundancji, czyli nadliczbowości stopni swobody tego typu mechanizmów. W przypadkach nieregularnego środowiska pracy, roboty przypominające biologiczne trąby słonia lub węże przewyższają tradycyjne roboty poruszające się na kołach, nogach lub gąsienicach. Badania nad tego typu robotami prowadzone są już od kilku dekad. Wężowy rodzaj lokomocji był już studiowany w latach czterdziestych dwudziestego wieku [2]. Pięćdziesiąt lat później został opracowany ścisły model matematyczny tego typu lokomocji [3]. Od dawna jednym z wyzwań naukowców zajmujących się robotyką było stworzenie hiper-redundantnego ramienia wielostawowego, które, podobnie
Autor korespondujący:
Machi Zawidzki, zawidzki@piap.lukasiewicz.gov.pl
Artykuł recenzowany nadesłany 15.12.2024 r., przyjęty do druku 16.07.2025 r.
Zezwala się na korzystanie z artykułu na warunkach licencji Creative Commons Uznanie autorstwa 4.0 Int.
jak trąba słonia, mogłoby aktywnie omijając przeszkody wślizgnąć się w trudno dostępne i wąskie przestrzenie [4]. Do tej pory przeprowadzono wiele badań symulacyjnych nad problemami związanymi ze sterowaniem nadmiarowym robotów hiper-redundantnych. Niemniej zaprojektowanie fizycznego mechanizmu ramienia okazało się bardzo trudne i do tej pory wykonano i wykorzystano tylko kilka praktycznych modeli [5]. Większość z nich przeznaczona jest do pełzania [6–10], niektóre do pływania [11, 12], a jeszcze mniej zarówno do pełzania, jak i pływania [13, 14]. Przykład tych ostatnich pokazano na Rys. 1. W rozmaitych środowiskach, podobnie jak biologiczne węże lub trąby słonia, manipulatory i lokomotory hiper-redundantne mają pewną przewagę nad konwencjonalnymi robotami. Mogą one działać w skomplikowanych geometrycznie środowiskach,
Rys. 1. Fotografia modularnego robota AmphiBot skonstruowanego na EPFL w Szwajcarii (www.epfl.ch/labs/biorob/)
Fig. 1. A photograph of the modular AmphiBot robot constructed in the School of Computer and Communication Sciences, EPFL Switzerland (www.epfl.ch/labs/biorob/)
Rys. 2: Oliver Crispin Robotics Ltd. Manipulatory bioniczne z serii II, systemu X125. Po lewej: manipulator z laserową głowicą tnącą. Po prawej: manipulator inspekcyjny z lampą i kamerą (http://www.ocrobotics.com)
Fig. 2. Oliver Crispin Robotics Ltd. Snake-arm robots, series II, X125 System. On the left: sleeved and integrated manipulator with a laser cutting head. On the right: unsleeved, integrated manipulator with inspection camera and light tool (www.ocrobotics.com)
które są niedostępne dla innych metod. W zależności od wymaganego zadania, na takich manipulatorach można instalować różnego rodzaj głowice robocze, np. do: spawania, czyszczenia, monitorowania itp. (Rys. 2).
W ogólności sześć stopni swobody wystarcza do wykonania dowolnego ruchu w przestrzeni trójwymiarowej: przemieszczenie wzdłuż trzech osi kartezjańskich X, Y, Z; oraz trzy obroty: odchylenie, pochylenie i przechylenie. Konwencjonalny manipulator przemysłowy ma niewielką liczbę DOF – zwykle tylko sześć. Z drugiej strony, ludzkie ramię jest biologicznym archetypem kinematycznie redundantnego manipulatora z siedmioma stopniami swobody: trzy w ramieniu, jeden w łokciu i trzy w nadgarstku. W wielu robotach przemysłowych zastosowano ten układ kinematyczny, np. PA-10 firmy Mitsubishi, Lightweight Robot DLR (Deutsches Zentrum für Luft- und Raumfahrt) itp. DEXTER firmy Scienzia Machinale jest przykładem manipulatora o ośmiu stopniach swobody. Systemy z większą liczbą przegubów nazywane są redundantnymi, podczas gdy termin hiper-redundantny odnosi się do manipulatorów z bardzo dużą, być może nieskończoną, liczbą stopni swobody [15]. Manipulatory takie można dalej podzielić na: manipulatory sztywne podobne do kręgowców, np. takie jak węże, oraz manipulatory ciągłe podobne do bezkręgowców, takie jak ramiona ośmiornicy lub trąba słonia.
Problem kinematyki odwrotnej dla manipulatora szeregowego polega na określeniu pozycji przegubów z uwzględnieniem pozycji i orientacji końcówki manipulatora. Rozwiązania w postaci zamkniętej są praktyczne, ponieważ łatwo identyfikują wszystkie możliwe rozwiązania szybciej niż metody numeryczne [16]. Problem kinematyki odwrotnej typowego manipulatora przemysłowego można często rozwiązać anali-
tycznie [17], co upraszcza implementację układu sterowania. Manipulatory hiper-redundantne są jednak systemami wysoce nieliniowymi, dlatego problem kinematyki odwrotnej jest dla nich znacznie trudniejszy, a często wręcz nierozwiązywalny metodami analitycznymi. Przeto ich sterowanie nie jest łatwe i zwykle wymaga zastosowania metod inteligencji obliczeniowej [18–20].
W pracy [21] zaproponowano metodę rozwiązania problemu kinematyki odwrotnej planarnego manipulatora redundantnego w postaci zamkniętej. Opierała się ona na zastosowaniu różniczki Frecheta pewnej funkcji kryterialnej wprowadzonej w celu rozwiązania redundancji. Model ten nie zawierał jednak żadnych ograniczeń na zakres ruchu przegubów – co w rzeczywistości znacznie komplikuje sformułowanie. Co więcej, już w kinematyce prostej opis analityczny „eksploduje” wraz z liczbą ogniw, nie wspominając o kinematyce odwrotnej, która z natury jest trudniejsza. Dlatego też proponowane w [21] podejście nie jest praktyczne w przypadku manipulatorów hiper-redundantnych. Pionierska praca modelowania matematycznego dyskretnego redundantnego manipulatora planarnego w przestrzeni kartezjańskiej została przedstawiona w 1989 r. [22]. Ten sam autor przedstawił w pracy [23] model kinematyki obrotowego, redundantnego manipulatora w postaci automatu skończonego [24]. Implementacja heurystycznego algorytmu przeszukiwania grafowego w celu znalezienia bezkolizyjnej trajektorii dla pięcio-przegubowego planarnego redundantnego manipulatora została przedstawiona w [25]. Dla problemu omijania przeszkód przez planarne manipulatory hiper-redundantne, tak zwane podejście “tunelowania” zostało zaprezentowane w [15]. W kolejnym artykule [26] ci sami autorzy przedstawili hiper-redundantne mechanizmy robotów i ich zastosowania, w tym hiper-redundantnego robota o trzydziestu stopniach swobody. W pracy [27] dynamika hiper-redundantnych manipulatorów została sformułowana jako problem mechaniki ciągłej. Zaletą przedstawionej metody było to, że można ją łatwo zrównoleglić. Więcej informacji na temat tego typu manipulatorów można znaleźć w pracy [27].
We wcześniejszym eksperymencie [1] przedstawiono koncepcję niezwykle prostego manipulatora planarnego, składającego się z 24 przystających modułów. Każdy moduł ma tylko dwie możliwe dyskretne pozycje w stosunku do poprzedniego modułu: skręt w lewo (/6) −π lub w prawo (/6) π (Rys. 3.1). Manipulator jest umieszczony w środowisku eksperymentalnym (Rys. 3.2). Zadaniem jest umieszczenie bez kolizji końcówki manipulatora w pobliżu pięciu zadanych punktów. Pomimo
pozycji manipulatora podczas eksperymentu
Rys. 3. 1. Dwa połączone ze sobą moduły i widok rozstrzelony pokazujący połączenie. 2. Konfiguracja eksperymentu. 3. Na czerwono pokazano obwiednię wszystkich
Fig. 3. 1. Two linked modules and an exploded view showing the connection. 2. Experiment setup. 3. The envelope of all manipulator positions during the experiment is shown in red
niezwykłej prostoty, manipulator skutecznie “wpełza” do przestrzeni roboczej, odwiedza wyznaczone punkty i bezpiecznie “wypełza”, co ilustruje Rys. 3.3.
W kolejnym rozdziale przedstawiono trójwymiarową wersję manipulatora Arm-Z oraz analogiczny eksperyment w przestrzeni 3D.
3. Przestrzenna inspekcja manipulatorem
Arm-Z
Koncepcję modularnego manipulatora inspekcyjnego jako części orbitalnego systemu konserwacji przedstawiono w artykule [28].
Manipulator ten składał się z siedmiu modułów z obrotowymi złączami nachylonymi pod zadanym kątem, czyli każde ogniwo miało dwa stopnie swobody.
Trójwymiarowy manipulator Arm-Z wprowadzony w pracy [29] składa się z jednego rodzaju modułu, o jednym stopniu swobody – względnym skręcie. Każdy moduł jest określony przez kilka parametrów: wymiar r, odsunięcie d, i kąt między powierzchniami dolną (B) i górną (T) (Rys. 4).
Kształt i pozycja manipulatora Arm-Z w danej chwili zależy od: liczby modułów, parametrów geometrycznych modułu i sekwencji względnych skrętów między każdą parą modułów. Na Rys. 5 przedstawiono dwa moduły przy kolejnych skrętach od 0 do 180° co 30°.
Tradycyjnie analiza kinematyczna i planowanie ruchu dla manipulatorów redundantnych opierały się na: pseudo-odwrotności [30], uogólnionej odwrotności [31] lub rozszerzonej odwrotności [32] Jakobianu manipulatora. Niektórzy badacze rozważali schematy znajdowania nadmiarowych trajektorii manipulatora, które optymalizują prędkości lub momenty obrotowe przegubów na całej trajektorii zamiast od punktu do punktu, co opisano m.in. w pracach [33, 34]. Inne schematy kinematyki odwrotnej zostały opracowane w oparciu o koncepcję izotropii dynamicznej [35]. Efektywna obliczeniowo metoda wyznaczania optymalnych kinematycznie konfiguracji hiper-redundantnych manipulatorów została przedstawiona w artykule [36]. Wprawdzie w szczególnych przypadkach ist-
nieją rozwiązania w formie zamkniętej dla niektórych rodzajów manipulatorów hiper-redundantnych [37], jednakże w tym przypadku jest to niemożliwe. W następnym podrozdziale przedstawiono hybrydowy algorytm sterowania oparty na numerycznym szukaniu Jakobianu dla znalezienia docelowych stanów poszczególnych modułów oraz wykorzystaniu silnika fizyki do określenia wymaganych prędkości kątowych.
3.1. Algorytm wyszukania ścieżki przejścia do stanu docelowego
Ustawienie N modułów reprezentowane jest przez wektor [,,], iN θθθ = S gdzie i θ to kąt obrotu modułu i względem poprzedniego i − 1. S determinuje pozycję środka ostatniego modułu p i wektora normalnego n do płaszczyzny zamykającej ostatni moduł w punkcie p. Wektory p i n w pełni definiują pozycję ostatniego modułu, na którym może być zamontowany efektor, np. w postaci chwytaka czy kamery inspekcyjnej (n jest niezb ędny by określić kąty ustawienia powierzchni zamykającej ostatni moduł).
Manipulator składa się z szeregu N ogniw połączonych ze sobą złączami, a z każdym ogniwem tego łańcucha kinematycznego wiążemy układ kartezjańskich współrzędnych, którego środek znajduje się w środku koła tworzącego górne zamknięcie modułu. Wektor normalny n w tym nowym układzie ma współrzędne [0, 0, 1] i stanowi oś obrotu dla kolejnego modułu.
Macierz przejścia między układem złącza i − 1 oraz i została określona równaniem:
1 Rot(,)Trans(0,,)Rot(,), i i i yz HZ X θδδζ = (1) gdzie Rot(,) Z α to macierz obrotu wokół lokalnej osi Z o kąt α i Rot(,) X α analogicznie dla osi X.
Pozycję efektora (czyli ostatniego modułu) można otrzymać przez złożenie kolejnych transformacji:
0 12 1 (,,,)Rot(,)Trans(0,,)Rot(,). N N N i yz i HZX θθθ
(2)
Rys. 4. Po lewej moduł Arm-Z definiowany trzema parametrami geometrycznymi: r, d oraz . Po prawej wczesna makieta Arm-Z
Fig. 4. On the left: The Arm-Z module defined by three geometric parameters: r, d, and On the right: An early mock-up of Arm-Z
Rys. 5. Dolny (ciemnoszary) moduł jest przymocowany do podstawy i nie obraca się. Oś obrotu, która jest prostopadła do dolnej powierzchni górnego modułu, jest zaznaczona na ciemnoszaro
Fig. 5. The bottom (dark gray) module is fixed to the base and does not rotate. The axis of rotation, which is perpendicular to the bottom face of the top module is shown in dark gray
Wartości stałych ,,, yz ζδδ charakteryzujących moduł wynikają z założonej geometrii modułu, tutaj założono 22,5, ζ =° 0,1397m, y δ =− 0,7023m z δ = (Rys. 4).
Moduł 0, pełniący rolę podstawy, pozostaje nieruchomy względem podłoża i w tym konkretnym omawianym przypadku jest zakotwiczony pod kątem /2 ζ (Rys. 4), a oś obrotu modułu 1 wyznacza początkowy układ współrzędnych związany ze środowiskiem, przekształcony Trans(0,,/2)Rot(,/2). yz X δδζ
Celem algorytmu jest znalezienie kolejnych stanów S, które przeniosą środek ostatniego modułu p i wektor normalny n do zadanej docelowej pozycji pd wraz docelowym wektorem normalnym nd. Musi być to zrealizowane w sposób zapewniający unikanie kolizji manipulatora z samym sobą i statycznym otoczeniem. Dodatkowo stan końcowy S e jest nieznany, gdyż w ogólnym przypadku nie można zakładać, że np. pd leży w przestrzeni zawierającej punkty możliwe do osiągnięcia przez manipulator. Wynika to z charakterystyki geometrii manipulatora. Założono, że w czasie t stan manipulatora określić można za pomocą St i prędkości kątowych t S (prędkości początkowe są równe 0, 0 0). S = Celem jest znalezienie trajektorii S0,...,T, która przeniesie pozycję końcowego modułu do pozycji docelowej p, n w czasie końcowym t = T. Dynamika przejść między St i St+1 jest realizowana w symulatorze.
Ze względu na określone założenia oraz możliwość występowania przeszkód, problem jest traktowany jako optymalizacja wielokryterialna, tzn. w każdym kroku należy minimalizować zarówno odległość do celu, jak i zbliżać bieżący wektor normalny do docelowego. Minimalizacja numeryczna dotyczy funkcji celu:
2 ()(,)(1)(), fdTNττλ =+−⋅+ dd SppnnS (3)
gdzie Tτ i Nτ to wagi nadające znaczenie nagrodzie, odpowiednio za zbliżenie się do celu i osiągnięcie zakładanego wektora normalnego, d to odległość między punktami, ()λ S to funkcja osiągająca bardzo dużą wartość (pięć rzędów wielkości więcej niż typowe wartości f) w przypadku, gdy dla konfiguracji S manipulator jest w kolizji z samym sobą lub otoczeniem. Gdy () f ε < S zakłada się, że cel został osiągnięty.
while () f ε < S do 1 ttt γ + ←−∇ SSS posctrltowards(St+1) end while
gdzie 0,05 γ = to parametr będący miarą prędkości podążania za gradientem, ε przyjęto 0,5 dla wag 1. TN ττ==
Stosunkowo duża wartość ε wynika z faktu, że ze względu na swoją naturę, z dużym prawdopodobieństwem manipulator nie tylko nie może dokładnie osiągnąć docelowego punktu pd, ale także zakładanego wektora normalnego nd zależy nam na szybkim rozwiązaniu przybliżonym. Do symulacji wykorzystano model stworzony w realistycznym środowisku symulacyjnym PyBullet [38]. PyBullet rozwiązuje pełne równania dynamiki przy użyciu algorytmu Featherstone Articulated-Body w taki sposób, że masy, tensory bezwładności, grawitacja oraz wszystkie człony Coriolisa/odśrodkowe są automatycznie uwzględniane. Sterowanie realizowane jest jako zadawanie kolejnych docelowych kątów St, natomiast prędkości, wyliczanie momentów obrotowych dla przegubów i całkowanie równań ruchu realizowane jest już w symulatorze. Żeby było to możliwe, niezbędne jest założenie pewnych maksymalnych momentów obrotowych dla każdego przegubu.
W przytoczonym pseudokodzie funkcja posctrltowards realizuje takie właśnie sterowanie przez zadany okres (tutaj 100 kroków symulacji, gdzie każdy krok odpowiada 1/240 s; ruch taki oczywiście zmienia bieżący stan S w kierunku oczekiwanego St+1, chociaż sam stan St+1 nie musi zostać osiągnięty. Jeśli kąty manipulatora nie osiągną St+1, nie ma to wpływu na dalsze działanie, gdyż w kolejnych krokach funkcja celu jest minimalizowana, tak więc szukane są kąty S, które zbliżą końcowy moduł do pozycji docelowej.
Symulator został uruchomiony na typowym komputerze typu desktop i działał w czasie rzeczywistym. Wspomniane 100 kroków to kroki realizowane przez symulator, gdzie zadana trajektoria (tzn. kolejny jej wektor S) jest odtwarzana przez wewnętrzny regulator pozycyjny. Między tymi krokami realizowany jest algorytm znalezienia kolejnego stanu S. Można więc takie planowanie określić jako działające w trybie on-line, gdyż zarówno symulator, jak i planowanie mogą działać w czasie rzeczywistym.
Ze względu na fakt, że nie czyni się żadnych założeń dotyczących środowiska, w którym działa manipulator (czyli miejsc, w których pojawia się dodatkowa kara za kolizję) oraz stosunkowo skomplikowane zależności p i n od stanu układu, najwygodniej – w przypadku symulacji – obliczyć ( f∇ S) numerycznie. Wykorzystano approx_fprime ze scipy.optimize, która numerycznie oblicza jakobian funkcji skalarnej za pomocą różnic skończonych – przybliżając pochodne cząstkowe przez perturbację każdej zmiennej niezależnie i mierząc zmiany wartości funkcji celu.
Na aktualnym etapie badań nie zakładamy zbyt szczegółowego realności symulacji, gdyż (1) interesuje nas przede wszystkich zachowanie emergentne manipulatora pod kątem możliwości przejść między różnymi stanami, a nie jego sama dynamika; (2) fizyczny demonstrator układu jest w budowie i jego fizyczne parametry nie są jeszcze ustalone. Przyjmujemy tutaj masę modułu 1 kg i momenty bezwładności przybliżone cylindrem z wartościami tensora momentu bezwładności na diagonali równymi (0,25; 0,25; 0,5) kg·m2. Zakładając maksymalny moment obrotowy na przegubie na poziomie 100 N·m otrzymujemy niezbyt realistyczny manipulator, który swoim regulatorem otrzymuje prędkości kątowe, które dosyć łatwo osiągają zadane mu kąty St+1
4. Eksperyment numeryczny
Do eksperymentów użyto analogicznego planarnego zadania inspekcyjnego opisanego w [1]. W obu przypadkach manipulator wchodzi w zadany obszar testowy i zbliża końcówkę do pięciu zadanych punktów. Zasadnicza różnica polega na tym, że w niniejszym artykule manipulator Arm-Z dokonuje inspekcji nie na płaszczyźnie, lecz w przestrzeni trójwymiarowej. Tak jak w przypadku planarnym, tutaj też manipulator Arm-Z składa się z 24 identycznych modułów, co przy nieruchomym module bazowym daje 23 stopnie swobody – w tym przypadku (ciągłe) kąty względnych obrotów poszczególnych modułów. W przypadku zaprezentowanym na Rys. 6 zdefiniowano przejścia między kolejno następującymi po sobie punktami: pA = [−15/2 + ρ; 5 + ρ; 5], nA = [−1; 0; 0], pB = [−15/2 + ρ; 10 − ρ; 5], nB = [−0,7; 0,7; 0], pC = [−2,5; 10 − ρ; 5], nC = [0; 10], pD = [2,5 – ρ; 10 – ρ; 5], nD = [0,7; 0,7; 0], pE = [1,5; 6; 5], nE = [1; 0; 0], ρ to margines wynikający z tego, że moduł nie może fizycznie dotrzeć do samego punktu będącego stykiem dwóch prostopadłych ścian; przyjęto ρ = 0,8.
Środowisko dla opisywanego eksperymentu jest określone przez geometrię danej przestrzeni i lokalizację punktów, które podlegają inspekcji, a także umiejscowienie modułu bazowego manipulatora. Manipulator w stanie spoczynku jest umieszczony obok przestrzeni testowej. Na Rys. 6.1 pokazano widok
Jacek Szklarski, Ela Zawidzka, Tomasz Ponikiewski, Machi Zawidzki
Rys. 6. Wybrane fazy pokazujące działanie 24-modułowego hiper-redundantnego manipulatora Arm-Z. Na każdym widoku pokazano rzut z przodu oraz odpowiadający mu rzut z góry. Widok 1 pokazuje pozycję wyjściową. Następnie, odpowiednie widoki pokazują inspekcję pięciu kolejnych punktów: 8-pA, 9-pB, 11-pC, 12-pD, 13-pE. Widoki 14 i 15 pokazują w skróconej formie proces opuszczania przestrzeni testowej przez manipulator
Fig. 6. Selected stages showing the operation of the 24-module hyper-redundant Arm-Z manipulator. Each view shows: a front and a corresponding top views. View 1 shows the starting position. Next, the corresponding views show the inspection of five consecutive points: 8-pA, 9-pB, 11-pC, 12-pD, 13-pE Views 14 and 15 show selected stages of the manipulator leaving the test space
z przodu, natomiast poniżej korespondujący z nim widok z góry dla sytuacji wyjściowej.
Na tym etapie eksperymentu manipulator tworzy względnie prostą rurę. Zadaniem początkowym dla manipulatora jest bezkolizyjne wprowadzenie końcówki do przestrzeni testowej (Rys. 6.2–6). Następnie końcówka manipulatora zbliża się na zadaną odległość (5 mm) z odpowiednim ustawieniem wektora normalnego kolejno do pięciu zadanych punktów (A–E), co pokazano na (Rys. 6.7–13). W ostatnim etapie zadaniem manipulatora jest bezkolizyjne opuszczenie z przestrzeni testowej, która jest w znacznym stopniu odwróceniem procesu wprowadzania. Na podstawie przeprowadzonego eksperymentu przygotowano animację całej symulacji [39].
5. Podsumowanie
W artykule przedstawiono autorską koncepcję sterowania hiper-redundantnym manipulatorem Arm-Z.
Efektywność zaproponowanej metody zademonstrowano przez symulację zadania, jakim jest bezkolizyjne wejście 24-modułowego manipulatora Arm-Z do niewielkiej ograniczonej przestrzeni w celu dokonania inspekcji kilku zadanych punktów. Zadanie to jest realizowane przez bezkolizyjne zbliżenie końcówki manipulatora do poszczególnych punktów pod odpowiednim kątem z zadaną dokładnością.
Wykazano, że mimo niezwykle prostej budowy, za pomocą zaproponowanego algorytmu manipulator Arm-Z może być sterowany w celu wykonania stosunkowo skomplikowanej czynności w przestrzeni trójwymiarowej. Proponowane rozwiązanie jest konkurencyjne względem wcześniejszych metod [40].
Kolejnym naturalnym krokiem badań będzie wykonanie fizycznego demonstratora i opracowanie realistycznego modelu w środowisku symulacyjnym, który będzie jemu odpowiadał w jak najwierniejszy sposób. Ponadto omówiony algorytm generowanie ścieżki nie gwarantuje, że układ nie utknie w lokalnym minimum, co może zdarzyć się w przypadku bardziej skomplikowanych środowisk. Planuje się rozwiązać to zagadnienie bazując na planowaniu metodami próbkowania (ang. Sampling-based path planning).
Podziękowania
Opisane badania stanowią część projektu „Arm-Z: ekstremalnie modularny hiperredundantny ekonomiczny manipulator – opracowanie metod sterowania oraz analiza efektywności” finansowanego przez Narodowe Centrum Nauki w ramach programu OPUS 17, kontrakt nr 2019/33/B/ST8/02791.
Bibliografia
1. Zawidzka E., Zawidzki M., Discrete (Two-State) Modular Hyper-Redundant Planar Manipulator, “Computer Assisted Methods in Engineering and Science”, Vol. 29, No. 4, 2022, 397–407, DOI: 10.24423/cames.550.
2. Gray J., The mechanism of locomotion in snakes, “Journal of Experimental Biology”, Vol. 23, No. 2, 1946, 101–120, DOI: 10.1242/jeb.23.2.101.
3. Hirose S., Biologically Inspired Robots: Snake-Like Locomotors and Manipulators, Oxford University Press, 1993.
4. Hirose S., Design of hyper-redundant arm, Robotics Research: The Seventh International Symposium, 1996, 548–557, DOI: 10.1007/978-1-4471-0765-1_61.
5. Ijspeert A.J., Crespi A., Online trajectory generation in an amphibious snake robot using a lamprey-like central pattern generator model, Proceedings of the 2007 IEEE International Conference on Robotics and Automation, 262–268, DOI: 10.1109/ROBOT.2007.363797.
6. Chirikjian G.S., Burdick J.W., Design and experiments with a 30 DOF robot, Proceedings IEEE International Conference on Robotics and Automation, 1993, DOI: 10.1109/ROBOT.1993.291862.
7. Klaassen B., Paap K.L., GMD-SNAKE2: a snake-like robot driven by wheels and a method for motion control, Proceedings 1999 IEEE International Conference on Robotics and Automation, Vol. 4, 1999, 3014–3019, DOI: 10.1109/ROBOT.1999.774055.
8. Miller G.S.P., Snake robots for search and rescue, [In:] Neurotechnology for Biomimetic Robots, 2002, 271–284, DOI: 10.7551/mitpress/4962.003.0023.
9. Choi H.R., Ryew S.M., Robotic system with active steering capability for internal inspection of urban gas pipelines, “Mechatronics”, Vol. 12, No. 5, 2002, 713–736, DOI: 10.1016/S0957-4158(01)00022-8.
10. Tsakiris D.R., Sfakiotakis M., Menciassi A., La Spina G., Dario P., Polychaete-like undulatory robotic locomotion, Proceedings of the 2005 IEEE International Conference on Robotics and Automation, 2005, 3018–3023, DOI: 10.1109/ROBOT.2005.1570573.
11. Melsaac K.A., Ostrowski J.P., A geometric approach to anguilliform locomotion: modelling of an underwater eel robot, Proceedings 1999 IEEE International Conference on Robotics and Automation, Vol. 4, 1999, 2843–2848, DOI: 10.1109/ROBOT.1999.774028.
12. Wilbur C., Vorus W., Cao Y., Currie S.N., A lamprey-based undulatory vehicle, [In:] Neurotechnology for Biomimetic Robots, 2002, 285–296, DOI: 10.7551/mitpress/4962.003.0024.
13. Li B., Ma S., Ye C., Yu S., Zhang G., Gong H., Development of an amphibious snake-like robot, 8th World Congress on Intelligent Control and Automation, China, 2010, DOI: 10.1109/WCICA.2010.5553836..
14. Crespi A., Badertscher A., Guignard A., Ijspeert A.J., AmphiBot I: an amphibious snake-like robot, “Robotics and Autonomous Systems”, Vol. 50, No. 4, 2005, 163–175, DOI: 10.1016/j.robot.2004.09.015.
15. Chirikjian G.S., Burdick J.W., An obstacle avoidance algorithm for hyper-redundant manipulators, Proceedings IEEE International Conference on Robotics and Automation, 1990, 625–631, DOI: 10.1109/ROBOT.1990.126052.
17. Murray R.M., Li Z., Sastry S.S., A Mathematical Introduction to Robotic Manipulation, CRC Press, 1994, DOI: 10.5555/561828.
18. Rolf M., Steil J.J., Efficient exploratory learning of inverse kinematics on a bionic elephant trunk, “IEEE Transactions on Neural Networks and Learning Systems”, Vol. 25, No. 6, 2014, 1147–1160, DOI: 10.1109/TNNLS.2013.2287890.
19. Melingui A., Escande C.,Benoudjit N., Merzouki R., Mbede J.B., Qualitative approach for forward kinematic modeling of a Compact Bionic Handling Assistant trunk, “IFAC Proceedings Volumes”, Vol. 47, No. 3, 2014, 9353–9358, DOI: 10.3182/20140824-6-ZA-1003.01758.
20. Falkenhahn V., Hildebrandt A., Neumann R., Sawodny O., Dynamic Control of the Bionic Handling Assistant, “IEEE/ASME Transactions on Mechatronics”, Vol. 22, No. 1, 2017, 6–17, DOI: 10.1109/TMECH.2016.2605820.
21. Galicki M., A closed solution to the inverse kinematics of redundant manipulators, “Mechanism and Machine Theory”, Vol. 26, No. 2, 1991, 221–226, DOI: 10.1016/0094-114X(91)90085-I.
22. Jacak W., A discrete kinematic model of robots in the Cartesian space, “IEEE Transactions on Robotics and Automation”, Vol. 5, No. 4, 1989, 435–443, DOI: 10.1109/70.88058.
23. Jacak W., Strategies of searching for collision-free manipulator motions: automata theory approach, “Robotica”, Vol. 7, No. 2, 1989, 129–138, DOI: 10.1017/S0263574700005439.
24. Wang J., Formal methods in computer science, Chapman and Hall/CRC, 2019, DOI: 10.1201/9780429184185.
25. Galicki M., Morecki A., Finding collision-free trajectory for redundant manipulator by local information available, RoManSy 9, 1993, 61–71, DOI: 10.1007/BFb0031432.
26. Chirikjian G.S., Burdick J.W., Hyper-redundant robot mechanisms and their applications, Proceedings IROS ‘91 of IEEE/RSJ International Workshop on Intelligent Robots and Systems, DOI: 10.1109/IROS.1991.174447.
28. Kimura S., Tsuchiya S., Takegai T., Iizuka N., Moritani K., Nishida S., Kawashima N., Okamura R., Hyper redundant modular manipulator arm, 2000 26th Annual Conference of the IEEE Industrial Electronics Society. IECON 2000. 2000 IEEE International Conference on Industrial Electronics, Control and Instrumentation. 21st Century Technologies, Vol. 4, 2000, 2467–2472, DOI: 10.1109/IECON.2000.972384.
29. Zawidzki M., Nagakura T., Arm-Z: a modular virtual manipulative, [In:] H.-P. Schröcker, editor, Proceedings of the 16th International Conference on Geometry and Graphics, 2014, 75–80.
30. Hollerbach J., Suh K., Redundancy resolution of manipulators through torque optimization, IEEE Journal on Robotics and Automation, Vol. 3, No. 4, 1987, 308–316, DOI: 10.1109/JRA.1987.1087111.
31. Shamir T., Yomdin Y., Repeatability of redundant manipulators: Mathematical solution of the problem, “IEEE Transactions on Automatic Control”, Vol. 33, No. 11, 1988, 1004–1009, DOI: 10.1109/9.14412.
32. Baillieul J., Kinematic programming alternatives for redundant manipulators, Proceedings of 1985 IEEE International Conference on Robotics and Automation, Vol. 2, 1985, 722–728, DOI: 10.1109/ROBOT.1985.1087234.
33. Wang Z., Kazerounian K., An efficient algorithm for global optimization in redundant manipulations, “Journal of Mechanical Design”, Vol. 111, No. 4, 1989, 488–493, DOI: 10.1115/1.3259026.
34. Suh K., Hollerbach J., Local versus global torque optimization of redundant manipulators, Proceedings of 1987 IEEE International Conference on Robotics and Automation, Vol. 4, 1987, 619–624, DOI: 10.1109/ROBOT.1987.1087955.
35. Ma O., Angeles J., The concept of dynamic isotropy and its applications to inverse kinematics and trajectory planning, Proceedings of IEEE International Conference on Robotics and Automation, 1990, 481–486, DOI: 10.1109/ROBOT.1990.126024.
37. Konietschke R., Hirzinger G., Inverse kinematics with closed form solutions for highly redundant robotic systems, 2009 IEEE International Conference on Robotics and Automation, 2009, 2945–2950, DOI: 10.1109/ROBOT.2009.5152706.
38. Coumans E., Bai Y., Pybul let, a python module for physics simulation for games, robotics and machine learning, http://pybullet.org, 2016–2021.
39. Zawidzka E., Szklarski J., Zawidzki M., Animation: Arm-Z inspects 5 points inside the box, 2024, [https://youtu.be/8ho7o-JeP2c].
40. Zawidzki M., Szklarski J., Transformations of Arm-Z modular manipulator with Particle Swarm Optimization, “Advances in Engineering Software”, Vol. 126, 2018, 147–160, DOI: 10.1016/j.advengsoft.2018.05.003.
Simulation of Spatial Inspection with Arm-Z – the Extremely Modular Hyper-Redundant Manipulator
Abstract: Arm-Z is a concept of a hyper-redundant robotic manipulator composed of congruent modules with one degree of freedom (1-DOF) each. The end-effector of Arm-Z is capable of performing any movements in the workspace. The two main advantages of Arm-Z are: economic (due to the potential mass production of the modules) and robustness (since the broken modules can be easily replaced). On the other hand, controlling such a highly non-linear system is much more difficult than a typical industrial manipulator and requires the use of appropriate optimization techniques. This paper presents the preliminary results of the implementation of an algorithm based on the simple gradient method for finding the transition trajectory between the given states of Arm-Z. An example task for the manipulator is presented: Arm-Z is to safely enter the workspace, inspect the five points given, and safely leave the workspace. This experiment is a three-dimensional version of the previously implemented two-dimensional inspection.
Jacek Szklarski, Ela Zawidzka, Tomasz Ponikiewski, Machi Zawidzki
dr Jacek Szklarski jszklar@ippt.pan.pl
ORCID: 0000-0003-1541-9878
Kierownik Pracowni Systemów Inteligentnych w IPPT PAN. Doktorat w dziedzinie nau k fizycznych uzyskał na Uniwersytecie w Poczdamie. Aktualnie jego główne obszary zainteresowań to wizja maszynowa i zastosowanie metod sztucznej inteligencji w robotyce.
mgr inż. Ela Zawidzka zawidzka@ippt.pan.pl
ORCID: 0000-0003-1243-9355
Od 10/2020 szkoła doktorska Instytutu Podstawowych Problemów Techniki Polskiej Akademii Nauk. Temat badań: Metody sterowania hiperredundantnym modularnym manipulatorem. W latach 2009–2013 studium doktoranckie na Wydziale Inżynierii
Ma teriałowej, Politechnika Warszawska. Temat badań: Stopy o wysokiej entropii. W latach 2003–2008 studia magisterskie na Wydziale Inżynierii Materiałowej PW. Temat pracy: Wytwarzanie i charakteryzacja stopów z układu Ni-Zr-Ti z dodatkiem Ag, B, Cu lub Nb.
dr hab. inż. Tomasz Ponikiewski Tomasz.Ponikiewski@polsl.pl
ORCID: 0000-0003-0535-2454
Od 2016 r. profesor nadzwyczajny w Politechnice Śląskiej. Stopień naukowy doktora habilitowanego uzyskał w 2015 r. w dyscyplinie Inżynieria lądowa i transport na podstawie cyklu publikacji „Analiza właściwości i identyfikacja struktur fibrobetonów samozagęszczalnych w wybranych elementach modelowych”. Zakres zainteresowań naukowo-badawczych obejmuje: technologię betonów, zwłaszcza nowej generacji (betony wysokowartościowe, samozagęszczalne i ze zbrojeniem rozproszonym), reologię mieszanek na spoiwach cementowych, technologię druku 3D z mieszanek na spoiwach cementowych i pokrewnych oraz zastosowanie robotyki w technologiach budowlanych.
dr hab. inż. Machi Zawidzki zawidzki@piap.lukasiewicz.gov.pl
ORCID: 0000-0001-8695-4400
Od 10/2022 kierownik ZBI – Dział Wsparcia
Badań Aplikacyjnych w Sieci Badawczej Łukasiewicz – Przemysłowym Instytucie Automatyki i Pomiarów PIAP. Od 2/2017 adiunkt w Zakładzie Technologii Inteligentnych w Instytucie Podstawowych Problemów Techniki Polskiej Akademii Nauk. 7/2020 habilitacja w dziedzinie Nauk Technicznych, w dyscyplinie – Informatyka. Tytuł autoreferatu: Zastosowania metod inteligencji obliczeniowej do optymalizacji architektonicznych Systemów Ekstremalnie Modularnych. W latach 10/2007 – 09/2010 studia doktoranckie na Uniwersytecie Ritsumeikan w Japonii. Temat rozprawy: Application of Computational Intelligence to engineering design problems in Architecture – firmitatis, utilitatis, venustatis.
Algorytm przeszukiwania z zakazami do optymalizacji czasu komunikacji w środowisku inżynierskim CPDev
Andrzej Bożek, Dariusz Rzońca
Politechnika Rzeszowska, Katedra Informatyki i Automatyki, ul. W. Pola 2, 35-959 Rzeszów
Streszczenie: Wydajna komunikacja jest konieczna dla prawidłowej pracy rozproszonych systemów sterowania. Niniejszy artykuł poświęcony jest problemowi skrócenia czasu cyklu komunikacyjnego podczas odczytu mieszanych danych rejestrowo-binarnych w protokole Modbus ze sterownika przemysłowego, zwłaszcza implementującego pakiet inżynierski CPDev. Do optymalizacji zaprojektowano i zaimplementowano algorytm przeszukiwania z zakazami (tabu search). Wykonano obszerne eksperymenty obliczeniowe i zestawiono ich wyniki z rezultatami wcześniejszych badań, w których do tego samego problemu użyto programowania z ograniczeniami. Porównanie wyników wykazało, że nowy algorytm jest znacznie szybszy i dzięki temu nadaje się do praktycznego zastosowania w planowaniu komunikacji Modbus dla środowiska CPDev w czasie rzeczywistym.
Słowa kluczowe: tabu search, sterownik przemysłowy, PLC, komunikacja, Modbus, CPDev
1. Wprowadzenie
Protokół Modbus RTU jest powszechnie używany w systemach sterowania. Jedną z jego wad jest relatywnie niska prędkość komunikacji w porównaniu z innymi współczesnymi formami komunikacji między urządzeniami automatyki. Może to powodować ograniczenia w zastosowaniach wymagających dużej przepustowości danych w systemach sterowania w czasie rzeczywistym. W ramach niedawnych prac zaobserwowano [1, 2], że wymianę danych można znacznie przyspieszyć (rzędu kilku razy lub więcej) dzieląc odpowiednio przestrzeń adresową transmitowanych zmiennych na ramki komunikacyjne. W szczególności przygotowano algorytm optymalizacyjny oparty na programowaniu z ograniczeniami CP (ang. constraint programming) [1], który wyszukuje najszybszą konfigurację transmisji z uwzględnieniem dwojakiego rodzaju zmiennych (rejestrowych i binarnych) oraz z zastosowaniem dwóch funkcji protokołu (FC1 i FC3). Uzyskane wyniki są obiecujące, ale z drugiej strony badania wymagają rozszerzania z następujących przyczyn: 1. Dla istniejącego modelu CP uzyskano dowód optymalności rozwiązań tylko w przypadku zadań testowych o najmniejszych rozmiarach. Dla większości instancji testowych nie ma potwierdzenia optymalności, ani nawet miarodajnych ograniczeń dolnych czasu komunikacji.
Autor korespondujący:
Dariusz Rzońca, drzonca@kia.prz.edu.pl
Artykuł recenzowany nadesłany 15.12.2024 r., przyjęty do druku 16.07.2025 r.
2. Czas optymalizacji wzrasta relatywnie szybko z rozmiarem instancji testowych.
3. Użycie programowania z ograniczeniami wymaga zaawansowanego solwera, kosztownego i wykorzystującego dużo zasobów sprzętowych.
Odpowiedzią na wszystkie wymienione wątpliwości i niedogodności będzie opracowanie innego alternatywnego algorytmu do optymalizacji rejestrowo-binarnej, co jest celem niniejszej pracy. Zestawienie wyników z dwóch metod pozwoli ocenić ich spójność oraz porównać szybkość działania. Do opracowania wybrano algorytm typu przeszukiwanie z zakazami TS (ang. tabu-search ), który będzie zaimplementowany bezpośrednio bez potrzeby użycia dodatkowego kosztownego oprogramowania i może być uruchomiony na urządzeniach z niewielkimi zasobami.
Algorytm przeszukiwania z zakazami jest metaheurystyką opartą na przeszukiwaniu lokalnym, którą po raz pierwszy zaproponował Glover [3]. Charakterystycznym elementem implementacji TS jest lista zakazów (lista tabu), która przechowuje parametry pewnej liczby ostatnio zweryfikowanych rozwiązań (tzw. atrybuty tabu) i blokuje ponowny wybór rozwiązań cechujących się tymi parametrami, aby uniemożliwić zapętlenie przeszukiwań w zamkniętej trajektorii. Zastosowanie metaheurystyki TS dla konkretnego problemu optymalizacji wymaga: (a) zaprojektowania sposobu kodowania rozwiązań za pomocą zmiennych decyzyjnych, (b) określenia dozwolonych zmian zmiennych decyzyjnych, zwanych ruchami, przy tworzeniu nowego rozwiązania na podstawie poprzedniego, (c) specyfikacji sąsiedztwa, tzn. zbioru wszystkich możliwych ruchów wykonywanych na jednym rozwiązaniu, (d) zdefiniowania atrybutu tabu, (e) określenia innych szczegółowych założeń i parametrów.
2. Przegląd literatury
Norma IEC 61131-3 [4] wdrożona w Polsce jako PN-EN 61131-3 definiuje następujące dziedzinowe języki programowania dla sterowników przemysłowych PLC (ang. Programmable Logic Controller) i PAC (ang. Programmable Automation Controller): ST (ang. Structured Text), IL (ang. Instruction List), FBD (ang. Function Block Diagram), LD (ang. Ladder Diagram), SFC (ang. Sequential Function Chart). Jednym z pakietów inżynierskich implementujących języki normy IEC 61131-3 jest CPDev (ang. Control Program Developer) [5, 6] opracowany w Katedrze Informatyki i Automatyki Politechniki Rzeszowskiej. Środowisko to, mimo akademickiego a nie komercyjnego rodowodu, zostało wdrożone w kilku rozwiązaniach przemysłowych, we współpracy z przedsiębiorstwami polskimi i zagranicznymi (np. Praxis Automation Technology B.V. z Holandii czy iGrid T&D z Hiszpanii). Budowa CPDev pozwala na wykorzystanie różnych platform sprzętowych, od niewielkich ośmiobitowych procesorów do architektury wielordzeniowej [7] czy FPGA [8], dzięki użyciu dedykowanych interpreterów zwanych maszynami wirtualnymi CPDev [9]. Program sterowania, przygotowany w środowisku CPDev na komputerze PC w jednym z języków normy IEC 61131-3, jest kompilowany do kodu pośredniego VMASM (ang. Virtual Machine Assembler) a następnie interpretowany na docelowej platformie sprzętowej przez maszynę wirtualną CPDev [10]. Jedną z charakterystycznych cech takiego rozwiązania jest jednakowe rozmieszczenie zmiennych programu sterowania w pamięci danych maszyny wirtualnej, niezależne od architektury fizycznej użytego mikrokontrolera, co umożliwia przedstawioną w tym artykule optymalizację transmisji.
Zagadnienia związane z wymianą danych w rozproszonych systemach automatyki są szeroko omawiane w literaturze. Zbiorczy przegląd można znaleźć w monografiach [11, 12]. Norma IEC 61158 [13] przyjęta w Polsce jako PN-EN 61158 definiuje sieci polowe stosowane do komunikacji w przemysłowych systemach automatyki. Współcześnie często stosowane są także rozwiązania bazujące na przemysłowych sieciach Ethernet [14] oraz architektury heterogeniczne, integrujące różne sieci [15]. W niewielkich systemach wciąż jednak wykorzystywana jest komunikacja poprzez port szeregowy (np. RS-485), za pomocą przemysłowych protokołów komunikacyjnych. Wśród nich popularny jest protokół Modbus.
Modbus jest protokołem typu master-slave, co oznacza, że urządzenie nadrzędne inicjuje wymianę danych, a urządzenie podrzędne odpowiada. W jednej ramce komunikacyjnej można przesłać wiele zmiennych (zależnie od ich typu), dzięki czemu odpowiednie grupowanie danych może prowadzić do skrócenia łącznego czasu cyklu komunikacyjnego. Takie podejście było niekiedy przedstawiane w literaturze. W artykule [16] rozważana jest problematyka grupowania danych w protokole Modbus TCP podczas komunikacji z panelem HMI. W pracach innych autorów opisywano wpływ rozmieszczenia zmiennych na wydajność transmisji w protokole Modbus [17, 18], proponowano rozszerzenia tego protokołu [19] prowadzące do poprawy parametrów czasowych i analizowano wyniki eksperymentalne [20]. Innym aspektem rozważanym w [21] było dynamiczne zastosowanie grupowania podczas przeciążenia magistrali komunikacyjnej. Użyty w tej pracy algorytm przeszukiwania z zakazami od czasu swojego wprowadzenia [3] zdobył dużą popularność i okazał się bardzo skuteczny w optymalizacji dyskretnej. Jest szeroko stosowany do chwili obecnej w różnorodnych zadaniach optymalizacji. W najnowszych pracach TS zastosowano m.in. do harmonogramowania zadań w problemie przepływowym z maszynami równoległymi [22], optymalizacji energii do podgrzewania wody [23], optymalizacji struktury systemów dystrybucji energii elektrycznej [24], czy też minimalizacji liczby przecięć krawędzi w rysowaniu grafów [25].
Bieżący artykuł jest kontynuacją poprzednich prac: [1, 2, 26, 27]. Artykuły [26, 27] koncentrują się na grupowaniu podczas wymiany danych między sterownikiem PLC a panelem HMI wyłącznie za pomocą funkcji rejestrowych Modbus (FC3, FC6, FC16). Funkcje bitowe (jak np. FC1) nie są tam rozważane. W pracy [2] problematykę grupowania przedstawiono w sposób szerszy, dla różnych protokołów komunikacyjnych, ale nadal zakładając wyłącznie transmisję rejestrową, a nie binarną. Podobne założenia jak w niniejszym artykule (grupowanie przy mieszanym odczycie rejestrowo-binarnym w protokole Modbus) przyjęto w [1]. Opisano tam poprzednio uzyskane wyniki optymalizacji dla programowania z ograniczeniami. W bieżącym artykule użyto innego algorytmu optymalizacyjnego, przeszukiwania z zakazami i porównano oba podejścia.
3. Grupowanie danych w protokole Modbus
Protokół Modbus obsługuje dwa typy zmiennych – binarne i rejestrowe (szesnastobitowe). W sterownikach Modicon były one umieszczone w czterech osobnych przestrzeniach adresowych, odpowiednio jako wyjścia – zmienne binarne (ang. Output Coils), wejścia binarne (ang. Discrete Inputs), rejestry wejściowe (ang. Input Registers) i szesnastobitowe zmienne – rejestry (ang. Holding Registers). Wejścia (binarne i rejestrowe) są tylko do odczytu, pozostałe zmienne można odczytywać i zapisywać. Do ich obsługi w protokole Modbus zaimplementowano następujące funkcje: FC1 – odczyt zmiennych binarnych, FC2 – odczyt wejść binarnych, FC3 – odczyt rejestrów, FC4 – odczyt rejestrów wejściowych, FC5 – zapis pojedynczej zmiennej binarnej, FC6 – zapis pojedynczego rejestru, FC15 – zapis wielu zmiennych binarnych, FC16 – zapis wielu rejestrów.
We współczesnych sterownikach przemysłowych programowanych w językach normy IEC 61131-3 obsługiwane są także inne typy zmiennych, nie tylko binarne czy szesnastobitowe. Norma definiuje kilkanaście różnych typów, a także pozwala na tworzenie zmiennych złożonych – tablic i struktur. Typy te nie są natywnie obsługiwane w Modbus. Podczas transmisji wymagana jest konwersja do obsługiwanego w protokole typu, albo transmitowaną grupę rejestrów traktuje się jako fragment pamięci sterownika, zawierający kilka zmiennych, a ich wyodrębnienie i interpretacja odbywa się po stronie odbiorcy. Podział przestrzeni adresowej jest więc często inny niż założony w Modbus. W środowisku inżynierskim CPDev wszystkie zmienne, niezależnie od typu, umieszczone są we wspólnej przestrzeni adresowej. Zmienna binarna typu BOOL (zajmująca w pamięci sterownika implementującego CPDev jeden bajt) może więc bezpośrednio sąsiadować ze zmienną szesnastobitową (dwubajtową) typu INT czy WORD. Podejście takie ułatwia obsługę struktur, które mogą zawierać sąsiadujące zmienne różnych typów. Warto jednak zauważyć, że na niektórych architekturach mikroprocesorowych (np. ARM) dostęp do zmiennych ułożonych bez wyrównania (np. zmienna trzydziestodwubitowa pod adresem niepodzielnym przez cztery) musi odbywać się w odpowiedni sposób [28].
Jak wspomniano grupę rejestrów transmitowaną w protokole Modbus można traktować jako fragment pamięci sterownika, zawierający kilka zmiennych różnych typów. Skoro w przestrzeni adresowej sterownika CPDev zmienne binarne sąsiadują ze zmiennymi szesnastobitowymi (rejestrami), to decyzją projektanta systemu jest czy użyć funkcji FC3 do odczytu wszystkich zmiennych (także binarnych), czy też zmienne binarne odczytywać osobno dedykowaną funkcją FC1. Oczywiście w takim przypadku należy pamiętać o odpowiednim przeliczeniu adresów. Adres binarny, wykorzystywany w funkcji FC1, będzie zwiększany o jeden wraz z każdym bajtem,
a adres rejestrowy (wykorzystywany w funkcji FC3) będzie zwiększany o jeden dla każdego szesnastobitowego rejestru (czyli co dwa bajty). Dodatkowo kilka niesąsiadujących ze sobą zmiennych (zarówno rejestrowych jak też binarnych) można odczytać w kilku osobnych komunikatach, lub też łącznie, jako jedną grupę (blok) kilkunastu rejestrów, przesyłając także niewymagane dane. Możliwe jest także, że niektóre zmienne binarne będą przesyłane dwukrotnie zarówno w pewnym bloku rejestrowym funkcją FC3, jak też w bloku binarnym funkcją FC1. Mimo nadmiarowości takie postępowanie może niekiedy być korzystne, gdyż unika się dzielenia bloków na części, co zwiększa liczbę transmitowanych ramek i wydłuża łączny czas cyklu komunikacyjnego. Wybór odpowiedniego schematu wymian danych rzutuje na uzyskiwane parametry czasowe. Jak pokazano w [1] wybór optymalnego grupowania jest złożonym zagadnieniem, przy większej liczbie zmiennych celowe jest użycie algorytmów optymalizacyjnych. Znalezienie najlepszego grupowania podczas przygotowywania programu sterowania na komputerze PC pozwala wyznaczyć odpowiedni scenariusz wymian danych, który następnie będzie cyklicznie realizowany na sterowniku PLC.
4. Algorytm przeszukiwania z zakazami
4.1. Kodowanie rozwiązania
Szczegółowa sformalizowana definicja problemu optymalizacji rejestrowo-binarnej została przedstawiona w pracy [1]. Zestaw danych opisujących instancję tego problemu ma postać krotki ( ) RRRBBB ,,,,,,,,,RLH αβωαβω = (1)
gdzie R jest zbiorem adresów zmiennych rejestrowych wymagających odczytu, L i H są zbiorami adresów zmiennych binarnych (umieszczonych odpowiednio w dolnej lub górnej połowie lokalizacji rejestrowych), parametry R , α Rβ są współczynnikami funkcji liniowej określającej czas odczytu bloku zmiennych rejestrowych na podstawie jego długości, Rω reprezentuje limit długości bloku zmiennych rejestrowych, dla bloków zmiennych binarnych parametry B , α B , β Bω mają analogiczne znaczenie.
Wprowadzimy pomocnicze definicje
|| 11 ,(),, V kk k k VRLHvVvv + =∪∪⊆< (2)
|| 11 221,(),, B kk kk BLHbBbb + =∪+⊆< (3)
określające ciągi zawierające rosnąco uporządkowane adresy wszystkich odczytywanych lokalizacji rejestrowych (vk), niezależnie od rodzaju danych R/L/H, oraz kolejno numerowanych (z rozdzielczością ośmiobitową) lokalizacji zajętych tylko przez zmienne binarne (bk). Adekwatnie do zasad adresowania zmiennych i zgodnie z (3), lokalizacji binarnej bk odpowiada adres rejestrowy /2. bk
Do zakodowania rozwiązania w prezentowanym algorytmie przeszukiwania z zakazami wykorzystano strukturę danych złożoną z trzech ciągów binarnych zmiennych decyzyjnych
–|| 1 (){0,1} B kkσ = ∈ – lokalizacja binarna bk musi zostać przesłana w bloku binarnym, gdy 1, kσ = i musi zostać przesłana w bloku rejestrowym w przeciwnym przypadku,
–||1 1 (){0,1} V kkρ ∈ – lokalizacje rejestrowe v k i v k+m są transmitowane w odrębnych blokach wtedy i tylko wtedy, gdy 1, kρ =
||1 1 (){0,1} B kkη ∈ – lokalizacje binarne bk i bk+m są przesyłane w odrębnych blokach wtedy i tylko wtedy, gdy 1, kη = gdzie vk+m, 1 m ≥ oznacza kolejną lokalizację rejestrową transmitowaną po vk, analogicznie jest dla lokalizacji binarnych bk i bk+m
Na rys. 1 przedstawiony został przykład pozwalający dokładniej wyjaśnić zasady kodowania. W górnej części znajduje się fragment ciągu (vk), tj. parametry vi, …, vi+5, które zawierają adresy lokalizacji rejestrowych w rozumieniu (2), tzn. uporządkowanych lokalizacji, które muszą (R) lub mogą (L i H) być przesyłane w blokach rejestrowych. Analogicznie w dolnej części umieszczony jest fragment ciągu bk w postaci parametrów bj−1, …, bj+5, które zawierają rosnąco uporządkowane adresy lokalizacji binarnych w rozumieniu (3), możliwe do odczytu w blokach binarnych. Zmienne 15 ,,,jj σσ −+ gdy mają wartość 1, wymuszają transmisję lokalizacji bk o tym samym indeksie w bloku binarnym, a w przeciwnym razie w bloku rejestrowym w lokalizacji jednoznacznie określonej relacją /2. ij vb =
Rys. 1. Kodowanie problemu za pomocą zmiennych decyzyjnych Fig. 1. Problem encoding by decision variables
Zasadniczo zmienna kρ decyduje o transmisji lokalizacji vk i vk+1 w jednym bloku (= 0) lub ich rozdzieleniu (= 1), ale jest tak tylko wtedy, gdy obie te lokalizacje są przydzielone do bloków rejestrowych. Jeśli lokalizacja vk nie jest przydzielona do bloku rejestrowego (tzn. zawiera zmienne binarne przyporządkowane przez () jσ wyłącznie do bloków binarnych), wtedy wartość kρ jest ignorowana w dekodowaniu rozwiązania i określana jako redundantna. Jeśli natomiast vk podlega transmisji rejestrowej, ale vk+1 nie, wtedy kρ determinuje separację bloków między vk, a najbliższą lokalizacją vk+m ujętą w transmisji (o ile taka istnieje). Powracając do przykładu z rys. 1, jeśli 0, jσ = to iρ będzie określać separację transmisji między vk i vk+1, natomiast w przypadku 12 (,,)(1,1,0) jjj σσσ ++ = określi separację między vk i vk+2, a zmienna 1 iρ + stanie się redundantna. Gdyby jednak otrzymać 4 (,,)(1,,1), jj σσ + = wtedy iρ będzie określać separację między vk i vk+3, w czym wartości 3 jσ + i 4 jσ + nie mają znaczenia, ponieważ vk+3 musi być przesłane w bloku rejestrowym. Analogicznie zmienna decyzyjna kη jest uznawana za redundantną, jeśli 0 kσ = wyłącza bk z transmisji w bloku binarnym. Na przykład, jeśli 3 (,,)(1,0,0,1) jj σσ + = (rys. 1), wtedy jη specyfikuje separację bloków binarnych między bj i bj+3, a zmienne j +1 i j +2 stają się redundantne. W oparciu o omówioną wyżej interpretację ciągów zmiennych decyzyjnych (), kσ () kρ i () kη można jednoznacznie podzielić odczytywane zmienne na bloki rejestrowe i binarne, uzyskując zbiory oznaczone w pracy [1] jako FB (2) i FR (3), następnie formuła (4) z tej samej pracy pozwala wyznaczyć czas cyklu komunikacyjnego, będący dla rozważanego tu algorytmu minimalizowaną funkcją celu.
4.2. Ruchy i sąsiedztwo
W algorytmach optymalizacji bazujących na przeszukiwaniu lokalnym sąsiedztwo jest zbiorem rozwiązań, które można utworzyć przez modyfikacje rozwiązania bieżącego, zwane ruchami. Zdefiniujmy ciąg ( ) 2||||2 1 ()()()() BV ii kkk γσρη +− = = stanowiący konkatenację trzech ciągów zmiennych decyzyjnych oraz łatwą do praktycznej implementacji funkcję która zwraca wartość logiczną T (true) wtedy i tylko wtedy, gdy zmienna zawarta w ciągu () iγ pod indeksem i jest redundantna w sensie zdefiniowanym w poprzedniej sekcji. Ciąg () iγ będzie nazywany rozwiązaniem, ponieważ koduje jednoznaczne rozwiązanie problemu.
narnych dłuższym niż B , ω wtedy rozwiązanie jest uznawane za niedopuszczalne i pomijane w przeszukiwanym sąsiedztwie.
2. Generowanie rozwiązania początkowego. Rozwiązanie początkowe tworzone jest jako losowy ciąg (). iγ W razie uzyskania rozwiązania niedopuszczalnego, losowanie jest powtarzane.
3. Kryterium aspiracji. Zastosowano standardowe dla TS kryterium aspiracji, polegające na akceptacji nowego rozwiązania poprawiającego dotychczasowe optimum globalne, nawet jeśli jest ono wykluczone przez listę tabu.
(4)
W zaimplementowanym algorytmie za sąsiedztwo rozwiązania () iγ przyjęto zbiór () () { } 1 1 (), () ()|(1)(1), i M i iii ijiiji jM jF γ γ γγδγδγ ∗∗
gdzie M = 2|B| + |V| − 2, a ijδ jest symbolem Kroneckera. Ruchy są zatem uzyskiwane przez negację logiczną pojedynczych zmiennych decyzyjnych z rozwiązania wyjściowego, z wyłączeniem zmiennych redundantnych, a sąsiedztwo jest zbiorem tych ruchów. Modyfikacje zmiennych redundantnych nie powodują zmiany zakodowanego rozwiązania, więc ich wykluczenie jest oczywistym założeniem przy tworzeniu sąsiedztwa umożliwiającego wydajne przeszukiwanie.
4.3. Atrybut tabu
Atrybut tabu to cecha rozwiązania umieszczana na liście zakazów. Jeśli atrybut tabu nowego rozwiązania w przeszukiwanym sąsiedztwie znajduje się na tej liście, to rozwiązanie takie jest pomijane. Jest to podstawowy mechanizm algorytmu TS zabezpieczający przed utknięciem przeszukiwania w cyklicznej trajektorii.
Dla rozważanego problemu optymalizacji przetestowano klika konstrukcji atrybutu zakazu. Pierwsza jako atrybut przyjmuje indeks zmiennej decyzyjnej w ciągu (), iγ która została zmodyfikowana w ruchu generującym nowe rozwiązanie. Taki atrybut tabu okazał się jednak zbyt mało specyficzny dla konkretnego rozwiązania, ponieważ pomija wszystkie wartości z (), iγ poza jedną, i w efekcie słabo zabezpiecza przed trajektoriami cyklicznymi. Sprawdzono wobec tego konstrukcję o przeciwnym charakterze, traktującą cały ciąg () iγ jako atrybut zakazu maksymalnie specyficzny dla reprezentowanego rozwiązania. Ten wybór okazał się znacznie lepszy, natomiast dodatkowe badania eksperymentalne wykazały, że algorytm jeszcze efektywniej minimalizuje funkcję celu po doprecyzowaniu atrybutu zakazu dla rozwiązania () iγ do postaci
4. Stochastyczne zawężenie sąsiedztwa. Zamiast bezpośredniego zastosowania pełnego sąsiedztwa () () iγ zdefiniowanego w (4), każdy jego element jest uwzględniany z prawdopodobieństwem , p co pozwala ograniczyć rozmiar sąsiedztwa i zdywersyfikować je stochastycznie.
5. Perturbacja rozwiązań. Dla lepszego zdynamizowania przeszukiwań i rozbijania ewentualnych trajektorii cyklicznych, rozwiązanie jest zaburzane co każde DP iteracji poprzez zanegowanie logiczne DN losowo wybranych zmiennych w ciągu (). iγ
5. Eksperymenty obliczeniowe
Do eksperymentów wykorzystano instancje testowe opracowane dla wcześniejszej weryfikacji optymalizacji CP w pracy [1], aby porównać wyniki poprzednio użytej metody z nowym algorytmem TS. Do obliczeń użyto 50 rdzeni serwera obliczeniowego z procesorem AMD EPYC Rome i 120 GB pamięci RAM. Zestaw testowy zawiera po 10 instancji o rozmiarach 20, 60 i 180 zmiennych do odczytu. W celu porównawczym optymalizację przeprowadzono również dla tych samych trzech prędkości transmisji: 9600, 38 400 i 115 200 b/s. Dla najmniejszej liczby zmiennych, tj. 20, algorytm TS natychmiast uzyskał wyniki identyczne z CP dla wszystkich trzech prędkości transmisji i 10 instancji testowych. Przyjęto wobec tego, że są to wyniki optymalne (dla większości z nich również solwer CP potwierdził optymalność, patrz [1]) i wykluczono je z dalszej analizy. Szczegółową analizę statystyczną wyników przeprowadzono dla pozostałych instancji testowych, tj. zawierających 60 i 180 zmiennych.
W tab. 1 podano użyte w obliczeniach wartości parametrów konfiguracyjnych algorytmu TS. Dobrano je eksperymentalnie dla uzyskania dobrej efektywności optymalizacji porównując kilkanaście wartości każdego z parametrów.
Dla każdej kombinacji prędkości transmisji i instancji testowej przeprowadzono 100 powtórzeń algorytmu po 10 minut każde. Powtarzanie jest uzasadnione ze względu na stochastyczne uwarunkowania działania algorytmu TS.
Dla zweryfikowania skuteczności rozszerzeń algorytmu TS mających poprawić jego efektywność, porównano wyniki w czterech konfiguracjach: ST – standardowa (bez rozszerzeń), Z – dodane stochastyczne zawężanie sąsiedztwa, P – dodane
tzn. atrybut zakazu jest konkatenacją ciągów zmiennych decyzyjnych () kρ i () kη z pominięciem (), kσ dostrajającym specyficzność atrybutu, i z zamaskowaniem zmiennych redundantnych wartościami 0.
4.4. Inne elementy algorytmu
Oprócz wyżej wymienionych założeń projektowych i funkcji, opracowany algorytm TS uwzględnia jeszcze inne, z których najważniejszymi są:
1. Wykrywanie rozwiązań niedopuszczalnych. Jeśli ciąg binarny () iγ reprezentuje rozwiązanie z blokiem zmiennych rejestrowych dłuższym niż Rω lub blokiem zmiennych bi-
Tabela 1. Parametry konfiguracyjne algorytmu TS
Table 1. Configuration parameters of TS algorithm
Parametr Wartość
Długość listy zakazów 1e4
Prawdopodobieństwo akceptacji p 0,5
Okres perturbacji DP 1e3
Poziom perturbacji DN 10
Rys. 2. Test porównawczy rozszerzeń algorytmu TS Fig. 2. Benchmark of the TS extensions
perturbacje, ZP – jednocześnie dodane Z i P. To porównanie wykonano tylko na podstawie instancji testowej nr 1, natomiast uwzględniono warianty z liczbą rejestrów 60 oraz 180, a także 3 prędkości transmisji. Wyniki porównania są przedstawione na rys. 2 w formie wykresu pudełkowego. Wartości zostały znormalizowane względem minimum funkcji celu uzyskanego w porównywanych konfiguracjach dla danej instancji, tzn. dla kolejnych grup czterech serii danych. Wykres wskazuje, że uzupełnienie implementacji standardowej (ST) o zawężanie sąsiedztwa (Z) nieco poprawia statystyczną efektywność algorytmu dla instancji zawierającej 60 rejestrów, natomiast poprawia ją wyraźnie w przypadku 180 rejestrów. Mechanizm perturbacji
[s]
Rys. 4. Zmiana funkcji celu w czasie optymalizacji, 180 zmiennych
Fig. 4. Objective function value as a function of optimization time, 180 variables 00.20.40.60.81
(P) powoduje natomiast większą poprawę, bardzo dużą przy 60 rejestrach, natomiast relatywnie mniejszą, ale również znaczną w przypadku 180 rejestrów. O ile przy 60 rejestrach połączenie dwóch rozszerzeń (ZP) nie ma przewagi nad samą perturbacją, to taka przewaga pojawia się wyraźnie dla 180 rejestrów. Na podstawie wyników porównania przyjęto, że łączne zastosowanie rozszerzeń Z i P skutecznie zwiększa efektywność algorytmu, zwłaszcza dla większych instancji, i dla takiej konfiguracji algorytmu TS wykonano pełny zakres optymalizacji obejmujący wszystkie instancje.
Uzyskane przebiegi zmian funkcji celu w czasie zamieszczono na wykresach z rys. 3 i 4, odpowiednio dla 60 i 180 zmiennych. Dla zwięzłości wykresy uwzględniają tylko instancję testową nr 1 jako przykładową, charakter przebiegów dla innych instancji jest podobny. Na każdym z wykresów nałożono przebiegi ze 100 powtórzeń, a kropki oznaczają momenty i wartości poprawy wyniku. Wartości funkcji celu są zaprezentowane po przeliczeniu na ”jakość rozwiązania”, które polega na normalizacji względem najlepszego końcowego wyniku uzyskanego ze wszystkich 100 powtórzeń. Zmiany wartości funkcji celu w czasie są bardzo strome, dlatego dla czytelności podzielono je na część do 1 s (po prawej) i od 1 s (po lewej). Największa poprawa następuje bardzo szybko po uruchomieniu algorytmu, w czasie poniżej 1 s. Wiąże się to z trajektorią w przestrzeni rozwiązań pokonywaną bezpośrednio do najbliższego minimum (w sensie zdefiniowanego
[s]
[s]
sąsiedztwa). Następnie algorytm dokonuje wolniejszej poprawy, w którą zaangażowane są właściwe mechanizmy przeszukiwania z zakazami.
W celu bardziej szczegółowego porównania algorytmów TS i CP opracowano wykresy z rys. 5. Wyniki TS są na nich przedstawione w postaci standardowego wykresu pudełkowego, na którym jako serie danych przyjęto końcowe wartości funkcji celu ze 100 powtórzeń dla każdej konfiguracji. Zielone znaczniki reprezentują wartości funkcji celu uzyskane przez optymalizację CP. Zestawienie wyników prowadzi do kilku wniosków:
1. Rozrzut wartości funkcji celu uzyskiwanych w odrębnych powtórzeniach TS dla tych samych danych jest niewielki, a więc wyniki są spójne i w praktycznym zastosowaniu wystarczy mała liczba uruchomień lub nawet pojedyncze. Maksymalna odchyłka od wyniku najlepszego nie przekracza 8 %, przy czym odchyłki rosną z liczbą rejestrów oraz (dla 180 zmiennych) z prędkością transmisji.
2. Dla większości testów opartych na 60 zmiennych wszystkie powtórzenia TS oraz wykonania CP dają identyczne wyniki, co pozwala sądzić, że zadania te są relatywnie łatwe, a uzyskane wartości czasu komunikacji są optymalne, nawet jeśli ta optymalność nie ma ścisłego potwierdzenia. Taka spójność wyników wskazuje także na poprawność obu algorytmów, zaimplementowanych zupełnie niezależnie i w całkowicie inny sposób.
123456789 10
123456789 10
Bożek, Dariusz Rzońca
123456789 10
Rys. 5. Zestawienie wyników i porównanie z metodą CP
Fig. 5. Results review and comparison to CP method
123456789 10
3. W przypadku największych instancji (180 zmiennych) optymalizacja CP nabiera statystycznej przewagi nad TS wraz ze wzrostem prędkości transmisji. Przyczyna tego efektu wymaga dalszych analiz, może nią być przyjęta dla TS postać sąsiedztwa. Jednakże przewaga CP nad TS nie przekracza nigdy 4 %, podczas gdy przewaga TS nad CP osiąga dla kilku instancji rząd kilkunastu procent.
Obszerny zestaw wyników eksperymentalnych z wielokrotnych powtórzeń TS pozwala wyznaczyć wiele parametrów statystycznych. Przykładowe parametry zostały przedstawione w tab. 2 i 3, odpowiednio dla 60 i 180 zmiennych, i reprezentują kolejno:
−BR – prędkość transmisji, −Inst – numer instancji, Max [%] – maksymalną wartość funkcji celu TS względem wartości minimalnej ze 100 powtórzeń, Mean [%] – średnią wartość funkcji celu TS względem wartości minimalnej ze 100 powtórzeń, CV [%] – współczynnik zmienności wartości funkcji celu TS, BH (best hits) – krotność osiągnięcia wartości najlepszej (minimalnej) w 100 powtórzeniach, CP [%] – wartość funkcji celu CP odniesioną do najlepszej wartości funkcji celu TS, T [s] – czas, po którym lepszy z algorytmów dla danej instancji uzyskuje wynik korzystniejszy od końcowego wyniku drugiego z nich, jeśli wyniki są identyczne, komórka ma wartość 0, TSB (TS better) – liczba powtórzeń TS, w których algorytm ten był lepszy od CP, CPB (CP better) – liczba powtórzeń TS, w których algorytm ten był gorszy od CP, TS2 – czas, po którym TS uzyskał wartość mniejszą od 102 % wartości końcowej, CP5 – czas, po którym CP uzyskał wartość mniejszą od 105 % wartości końcowej.
10
1 23456789 10
Na podstawie danych z tabel można sformułować m.in. następujące wnioski
1. Parametry Max[%], Mean[%], CV[%] i BH pozwalają dokładniej ocenić rozrzut wyników przy powtarzaniu algorytmu TS. Wyraźna systematyczność wzrostu rozrzutu wyników wraz z prędkością transmisji zachodzi dla 180 zmiennych. Dla 60 zmiennych korelacja taka jest słabsza, a rozrzut mocniej zależy od konkretnej instancji, np. dla BR = 115 200 występują przypadki z zerowymi oraz bardzo dużymi rozrzutami. Aż w 16 na 30 testów dla 60 zmiennych algorytm TS uzyskuje wszystkie rozwiązania identyczne, natomiast nie ma to miejsca nigdy dla 180 zmiennych, dla których z kolei w 11 testach rozwiązanie najlepsze uzyskiwane jest tylko jednokrotnie.
2. Parametry TSB i CPB wskazują, że porównywane algorytmy są konkurencyjne w aspekcie uzyskanych wartości funkcji celu. Zależnie od konkretnej instancji zadania, TS może być we wszystkich powtórzeniach lepszy od CP, we wszystkich gorszy, w niektórych jednakowy, albo w części lepszy i w części gorszy. Szczególnie jest to widoczne dla przypadku 180 zmiennych i BR = 38 400.
3. Parametry czasowe T[s], TS2[s] i CP5[s] wyraźnie faworyzują TS pod względem szybkości optymalizacji. Gdy TS uzyskuje wynik lepszy od CP, przewaga pojawia się w czasie kilku sekund od uruchomienia (z wyjątkiem jednego przypadku), natomiast gdy przewagę ma CP, zyskuje ją nie szybciej niż po ok. 10 minutach. Ponieważ końcowe wartości funkcji celu z obu algorytmów są zwykle zbliżone, z praktycznego punktu widzenia istotniejsze staje się, po jakim czasie są one osiągane. Optymalizacja CP uzyskuje wynik 5 % powyżej optimum (parametr CP5[s]) po czasie mocno uzależnionym od konkretnej instancji, wynoszącym między 1 a 450 s (przeciętnie 10 s) dla 60 zmiennych oraz między 275 a 3160 s (przeciętnie 615 s) dla 180 zmiennych. W przypadku TS poprawa jest tak szybka, że 5 % powyżej optimum algorytm uzyskuje praktycznie natychmiast, dla-
Table 2. Selected statistical parameters of solutions, 60 variables
tego użyto marginesu 2 % (parametr TS2[s]), który nadal jest osiągany w większości przypadków w czasie najwyżej kilku sekund, znacznie szybciej niż 5% dla CP.
4. Czas uzyskania dobrego wyniku przez algorytm TS, którego miarą jest parametr TS2[s], zależy od konkretnej instancji, tj. rozmieszczenia transmitowanych zmiennych, jak i od szybkości transmisji. W przypadku 180 zmiennych (tab. 3) średnia wartość TS2[s] wyraźnie rośnie z prędkością trans-
misji, ale indywidualne czasy mocno zależą od instancji, niekiedy w sposób nieregularny, np. dla instancji nr 3 wartość TS2[s] wynosi kolejno 16, 1 i 487 s dla rosnących prędkości. Można również dokonać podziału instancji i prędkości transmisji na takie, które okazały się łatwe i prawie natychmiast uzyskano bardzo dobre rozwiązania, np. instancje nr 1, 4, 5, 6, 7 dla BR = 115 200 oraz wyraźnie trudniejsze, np. pozostałe instancje dla tej samej prędkości.
Table 3. Selected statistical parameters of solutions, 180 variables
6. Podsumowanie
Dobór odpowiedniego schematu wymian danych wpływa na wydajność komunikacji. Architektura pamięci sterowników przemysłowych implementujących pakiet inżynierski CPDev pozwala na odczyt zmiennych binarnych w protokole Modbus na różne sposoby, za pomocą dedykowanych funkcji binarnych jak też przez funkcje rejestrowe, wspólnie z innymi zmiennymi.
Znalezienie optymalnego grupowania przy większej liczbie zmiennych jest złożone i wymaga zastosowania metod optymalizacyjnych.
W artykule zaproponowano użycie algorytmu przeszukiwania z zakazami w celu znalezienia grupowania skutkującego najmniejszym sumarycznym czasem cyklu komunikacyjnego. Jest to odmienne podejście niż przedstawione w [1], gdzie użyto programowania z ograniczeniami. Przeprowadzono porównanie
obu tych modeli optymalizacyjnych dla identycznych instancji testowych. W rezultacie badań eksperymentalnych można wnioskować, że:
dla niewielkiej liczby zmiennych oba podejścia dają identyczne rezultaty, niezależnie od prędkości transmisji, dla dużej liczby zmiennych przy niewielkiej prędkości transmisji przeszukiwanie z zakazami daje lepsze wyniki niż programowanie z ograniczeniami, ale przy dużej prędkości transmisji tabu-search jest nieco gorszy.
Warto jednak zauważyć, że z praktycznego punktu widzenia niekiedy interesujące jest jak najszybsze wyznaczenie rozwiązania bliskiego optymalnemu. Tu przewagę ma przeszukiwanie z zakazami. Zazwyczaj, nawet dla dużych instancji, algorytm tabu-search znajduje suboptymalne rozwiązanie (nie gorsze niż 102 % końcowej wartości) w czasie poniżej 1 s, podczas gdy programowanie z ograniczeniami wymaga kilkuset sekund by znaleźć rozwiązanie mniejsze niż 105 % najlepszego. Dzięki temu możliwe jest zastosowanie przeszukiwania z zakazami do wyznaczania wstępnego rozwiązania na bieżąco, już w trakcie budowy programu, wraz z dodawaniem nowych zmiennych czy zmianą ich położenia. Co więcej algorytm tabu-search nie wymaga osobnego solwera jak programowanie z ograniczeniami i może być łatwo wbudowany w inne oprogramowanie. Jest to interesujący kierunek dalszych prac, możliwy do implementacji podczas rozwoju środowiska inżynierskiego CPDev. Innym potencjalnym kierunkiem może być wprowadzenie w sterowniku kopii transmitowanych zmiennych, rozmieszczonych tak, by zapewnić wydajną komunikację. Konieczne byłoby oczywiście także dodanie procesu synchronizującego zmiany wartości zmiennych, co stanowiłoby dodatkowe obciążenie. W ramach dalszych prac celowe byłoby przeprowadzenie analizy w jakich warunkach takie rozszerzenie byłoby opłacalne.
Bibliografia
1. Rzońca D., Bożek A., Optymalizacja mieszanego o dczytu zmiennych binarnych i rejestrowych w protokole Modbus ze sterownika PLC implementującego CPDev, „Pomiary Automatyka Robotyka”, Vol. 28, Nr 3, 2024, 83–91, DOI: 10.14313/PAR_253/83.
2. Bożek A., Rzońca D., Communication Time Optimization of Register-Based Data Transfer, “Electronics”, Vol. 12, No. 24, 2023, DOI: 10.3390/electronics12244917.
3. Glover F., Tabu Search—Part I, “ORSA Journal on Computing”, Vol. 1, No. 3, 1989, 190–206, DOI: 10.1287/ijoc.1.3.190.
5. Rzońca D., Sadolewski J., Stec A., Świder Z., Trybus B., Trybus L., Developing a Multiplatform Control Environment, “Journal of Automation, Mobile Robotics and Intelligent Systems”, Vol. 13, No. 4, 2019, 73–84, DOI: 10.14313/JAMRIS/4-2019/40.
6. Rzońca D., Sadolewski J., Stec A., Świder Z., Trybus B., Trybus L., CPDev engineering environment for control programming, [In:] Trends in Advanced Intelligent Control, Optimization and Automation, AISC, Vol. 577, 2017, 303–314, DOI: 10.1007/978-3-319-60699-6_29.
7. Hubacz M., Sadolewski J., Trybus B., Model i implementacja dwurdzeniowego sterownika programowalnego opartego na maszynie wirtualnej, „Pomiary Automatyka Robotyka”, Vol. 28, Nr 3, 2024, 93–99, DOI: 10.14313/PAR_253/93.
9. Trybus B., Development and Implementation of IEC 61131-3 Virtual Machine, “Theoretical and Applied Informatics”, Vol. 23, No. 1, 2011, 21–35, DOI: 10.2478/v10179-011-0002-z.
10. Sadolewski J. Trybus B., Compiler and virtual machine of a multiplatform control environment, “Bulletin of the Polish Academy of Sciences. Technical Sciences”, Vol. 70, No. 2, 2022, DOI: 10.24425/bpasts.2022.140554.
11. Kwiecień R., Komputerowe systemy automatyki przemysłowej, Helion, 2012.
12. Stój J., Wybrane zagadnienia sieci komunikacyjnych w przemysłowych systemach komputerowych, Wydawnictwo Politechniki Śląskiej, 2023.
14. Gaj P., Jasperneite J., Felser M., Computer Communication Within Industrial Distributed Environment – a Survey, “IEEE Transactions on Industrial Informatics”, Vol. 9, No. 1, 2013, 182–189, DOI: 10.1109/TII.2012.2209668.
15. Scanzio S., Wisniewski L., Gaj P., Heterogeneous and dependable networks in industry – A survey, “Computers in Industry”, Vol. 125, 2021, DOI: 10.1016/j.compind.2020.103388.
16. Titaev A., Reducing update data time for exchange via MODBUS TCP protocol by controlling a frame length, “Automatic Control and Computer Sciences”, Vol. 51, 2017, 357–365, DOI: 10.3103/S014641161705008X.
17. Găitan V.G., Zagan I., Modbus Protocol Performance Analysis in a Variable Configuration of the Physical Fieldbus Architecture, “IEEE Access”, Vol. 10, 2022, 123942–123955, DOI: 10.1109/ACCESS.2022.3224720.
18. Zagan I., Găitan V.G., Enhancing the Modbus Communication Protocol to Minimize Acquisition Times Based on an STM32-Embedded Device, “Mathematics”, Vol. 10, No. 24, 2022, DOI: 10.3390/math10244686.
19. Găitan V.G., Zagan I., Experimental Implementation and Performance Evaluation of an IoT Access Gateway for the Modbus Extension, “Sensors”, Vol. 21, No. 1, 2021, DOI: 10.3390/s21010246.
20. Găitan N.C., Zagan I., Găitan V.G., Proposed Modbus Extension Protocol and Real-Time Communication Timing Requirements for Distributed Embedded Systems, “Technologies”, Vol. 12, No. 10, 2024, DOI: 10.3390/technologies12100187.
21. Bednarek M., Będkowski L., Dąbrowski T., Wybrane funkcje systemu dozorująco-terapeutycznego w układzie komunikacji, „Diagnostyka”, Vol. 34, 2005, 31–36.
22. Zhou H., Liu H., Lv C., Zhang C., Shen W., A path relinking with tabu search algorithm for solving hybrid flow shop scheduling problem considering multiple critical paths, “Computers & Operations Research”, Vol. 170, 2024, DOI: 10.1016/j.cor.2024.106783.
23. Saida E.B., Hamid O., Fouad G., Saad G., Nada M., Ismael J., Tabu Search Algorithm for Optimal Electric Water Heating Energy Management, “IFAC-PapersOnLine”, Vol. 58, No. 13, 2024, 835–840, DOI: 10.1016/j.ifacol.2024.07.586.
24. Yamamoto R.Y., Pinto T., Romero R., Macedo L.H., Specialized tabu search algorithm applied to the reconfiguration of radial distribution systems, “International Journal of Electrical Power & Energy Systems”, Vol. 162, 2024, DOI: 10.1016/j.ijepes.2024.110258.
25. Peng B., Wang S., Liu D., Su Z., Lü Z., Glover F., Solving the incremental graph drawing problem by multiple neighborhood solution-based tabu search algorithm, “Expert Systems with Applications”, Vol. 237, Part A, 2024, DOI: 10.1016/j.eswa.2023.121477.
26. Rzońca D., Poprawa wydajności komunikacji sterownika przemysłowego z panelem operatorskim HMI w środowisku
27. Rzońca D., Przyspieszenie wymiany danych w protokole Modbus między PLC a HMI wykorzystującymi pakiet inżynierski CPDev, „Pomiary Automatyka Robotyka”, Vol. 26, No. 4, 2022, 85–89, DOI: 10.14313/PAR_246/85.
28. Hubacz M., Sadolewski J., Trybus B., Obsługa typów danych normy PN-EN 61131-3 w architekturze ARM z ograniczeniami dostępu do pamięci, „Pomiary Automatyka Robotyka”, Vol. 26, No. 1, 2022, 23–31, DOI: 10.14313/PAR_243/23.
Tabu Search Algorithm for Communication Time Optimization in the CPDev Engineering Environment
Abstract: Efficient communication is crucial for the correct operation of distributed control systems. This article is focused on the problem of reducing the communication cycle time during reading mixed register-binary data in the Modbus protocol from an industrial controller, especially implementing the CPDev engineering environment. A tabu-search algorithm was designed and implemented for optimization. Extensive computational experiments were performed and their results were compared with the results of previous studies in which constraint programming was used for the same problem. Comparison of the results revealed that the new algorithm is much faster and therefore suitable for practical use in real-time Modbus communication planning for the CPDev environment.
Licencjat matematyki (Uniwersytet Rzeszowski 2002), magister inżynier informatyki (Politechnika Rzeszowska 2004), doktor nauk technicznych w dyscyplinie informatyka, specjalność przemysłowe systemy informatyki (Politechnika Śląska 2012). Od 2004 roku asystent, a od 2013 adiunkt w Katedrze Informatyki i Automatyki Politechniki Rzeszowskiej. Jego zainteresowania naukowe koncentrują się na kolorowanych sieciach Petriego oraz zagadnieniach związanych z komunikacją w systemach automatyki.
dr inż. Andrzej Bożek abozek@prz.edu.pl
ORCID: 0000-0003-3015-7474
Absolwent Wydziału Elektrotechniki i Informatyki Politechniki Rzeszowskiej (2008). Stopień doktora nauk technicznych w dyscyplinie informatyka uzyskał w 2015 r. Pracuje jako adiunkt w Katedrze Informatyki i Automatyki Politechniki Rzeszowskiej. Jego zainteresowania naukowe dotyczą optymalizacji dyskretnej, harmonogramowania zadań oraz projektowania układów sterowania.
Andrzej Bożek, Dariusz Rzońca
Determination of the NETD Parameter Value of the Imaging System with a Single MWIR Detector for CO2 Detection
Sebastian Urbaś, Robert Olbrycht, Bogusław Więcek Lodz University of Technology, Institute of Electronics, Al. Politechniki 6, 90-924 Lodz, Poland
Abstract: This research presents the experimental assessment of the NETD parameter for an infrared system developed for gas detection using the single-pixel imaging technique. Gas imaging systems often uses the narrow-band filtering for contrast enhancement which significantly reduces the incoming radiation energy and deteriorates the signal-to-noise characteristic. The developed system was tested for CO2 detection in MWIR wavelength band. The presented results confirmed experimentally the higher value of the NETD parameter for the system equipped with the interference filter. The NETD parameter was evaluated using a simple testing stand with the black body for selecting the proper background temperature. The obtained results confirm the importance of the background temperature in the detection process, the value of which is important in determining the sensitivity and noise level of the system, the attenuation of the radiation of optical elements and the spectral characteristics of the detected gas.
1. Introduction
Keywords: single-pixel imaging, gas detection, NETD parameter, MWIR, Spatial Light Modulator (LWIR) bands [4]. In practice, the existing IR systems use most often use the wavelength range of approximately 4.2–4.4 µm.
A thermal imaging camera is a device that detects infrared radiation and converts it into a visible image. One of the parameters that significantly affects the quality of thermal image is the NETD (Noise Equivalent Temperature Difference) [1]. The NETD parameter indicates the smallest temperature difference the detector can distinguish, typically expressed in mK [2].
Nowadays, the NETD value of a typical the infrared (IR) imaging system is between 30 mK and 100 mK. Generally, thermal cameras with the NETD below 50 mK are used for high-precision detection and measurement. The NETD is crucial parameter in gas detection processes [3]. Too high value of NETD can make gas difficult to distinguish from noise.
A thermal imaging camera doesn’t “see” gas directly. It records radiation of the background attenuated by the gas. In order to detect gas with a thermal imaging system, an appropriate narrow-bandpass filter must be used. The CO2 gas has characteristic absorption band in both the Mid-Wave Infrared (MWIR) and the Long-Wave Infrared
Autor korespondujący:
Sebastian Urbaś, sebastian.urbas@dokt.p.lodz.pl
Artykuł recenzowany nadesłany 07.07.2025 r., przyjęty do druku 11.08.2025 r.
Currently, Optical Gas Imaging (OGI) techniques use thermal imaging cameras with a detector matrix [5]. The novel technique of OGI may use so-called single-pixel imaging (SPI). The SPI systems use only a single-detector [6]. An important element of this solution is the Spatial Light Modulator (SLM) which generates time-varying mask patterns (e.g. with Hadamard or Random templates) [5, 7]. The SLM has a significant impact on the imaging speed, resolution and wavelength. There are several types of SLMs. The Digital Micromirror Device (DMD) is the commonly used chip for single-pixel imaging [8]. The DMD consist of thousands of electrically controlled micromirrors that selectively redirect beams of radiation onto a single detector [9, 17]. The advantage of using DMD system is high-speed imaging and the high resolution. Unfortunately, disadvantage of DMD [10] is the limited wavelength range, typically to visible and near-IR bands [11]. Changing the mask patterns over time causes the change in the signal recorded by the single detector, which corresponds to the radiation passing through the SLM modulator [12]. The recorded signal is used to reconstruct an image using appropriate algorithms among others presented in the publication Review on infrared single-pixel imaging, Opto-Electronics Review [5]. Recently, Artificial Intelligence (AI) algorithms have been used more and more often [13]. The AI algorithms are effective in eliminating noise in images and augmenting their resolution [14].
2. Measurement method and test rig
Noise Equivalent Temperature Difference (NETD) is the important parameter of an IR systems defining the radiation signal change equal to the noise level defined by the standard deviation. In other words, the NETD refers to the minimum signal that can be detected, i.e. in case of signal-to-noise ratio S/N = 1. According the standard [15], the NETD should be measured at object with uniformly distributed temperature BB (Black Body) equal to 30 °C.
Assuming that the output signal of an IR system is voltage u, NETD can be expressed as:
where: σ – standard deviation of the output signal noise (V), u du R dT = – system temperature sensitivity of the output voltage expressed in V/K.
The NETD of imaging systems depends on many factors, mainly on the IR detector radiometric characteristics, but also on the parameters of the entire optical path, electronic acquisition system and the black body itself (radiation source). One of the element of the IR system for gas detection in the optical path is a narrow-band filter used for contrast enhancement. It attenuates the incident radiation significantly causing the sensitivity loss. In results, it has an impact on the NETD.
The Single-Pixel Camera (SPC) for gas detection are equipped with a narrow-band filter with transmission characteristic corresponding to the CO2 absorption wavelength band (about 4.26 µm). The transmission bandwidth of the filter that was used in this research is in the range 4191–4341 nm as presented in Fig. 1. The interference filter was made of sapphire, which provides high mechanical and thermal resistance. The
filter blocks radiation up to 6 µm, which eliminates a wide range of background energy. The FWHM (Full Width at Half Maximum) parameter is 150 nm and CWL (Central Wavelength) is 4266 nm [18].
The NETD parameter was analyzed by the system with the single MWIR detector shown in Fig. 2. The spectral range of the detector absorption band is from 2.7 µm to 5.2 µm [19]. The optical surface of the photovoltaic detector is 1 × 1 mm2, while the field of view (FOV) is 36°. The NETD parameter was tested in two configurations – with and without filter. The BB was placed in front of the detector at a distance of 12 cm, so that the active area of the BB covers the entire detector’s FOV. The BB is equipped with a precise temperature control system. The uniformity is ±0,10 °C at 35 °C over the entire surface of the BB aperture. The stability of the BB is ±0,05 °C at 35 °C. The BB stabilization time is 10 minutes [20].
4. Block diagram of the single-pixel IR imaging system for CO2 gas detection
Rys. 4. Schemat blokowy jednopikselowego systemu obrazowania IR do detekcji gazu CO2
5. Station for detecting CO2 gas leaks using an MWIR sensor
Rys.
Fig. 1. Characteristics of narrow-band filter used for CO2 gas detection
Rys. 1. Charakterystyka filtra wąskopasmowego zastosowanego do detekcji gazu CO2
Fig. 2. Block diagram of test rig used NETD measurement of a singledetector IR system
Rys. 2. Schemat blokowy stanowiska testowego służącego do pomiaru NETD dla pojedynczego detektora IR
Fig. 3. Laboratory stand for measuring the NETD parameter of the MWIR sensor
Rys. 3. Stanowisko laboratoryjne do pomiaru NETD detektora MWIR
Fig.
Fig.
5. Stanowisko do wykrywania wycieku gazu CO2 za pomocą detektora MWIR
a) b)
c)
Fig. 6. a) Generated SLM modulator with Hadamard mask; b) drill files prepared according to Excellon 2 format and “placed on” the Hadamard mask; c) close-up of the modulator aperture fragment – hole diameter 0.3 mm
Rys. 6. a) Wykonany modulator SLM z maską Hadamarda; b) pliki wierceń przygotowane w formacie Excellon 2 i „nałożone” na maskę Hadamarda; c) zbliżenie na fragment apertury modulatora – średnica otworu 0,3 mm
For the NETD measurement with the filter, the BB temperature was set between 80 °C and 220 °C. Without the filter, the BB temperature ranged from 30 °C to 150 °C. In both cases the detector signal was recorded every 20 °C.
The block diagram in Fig. 4 shows the concept of single-pixel imaging for CO2 gas detection. A narrow band-filter was mounted just in front of the single-detector.
The SLM modulator with Hadamard pattern apertures of 31 × 29 resolution was mounted on the DC motor axis. The rotation frequency of the modulator was ~30 rps (rotations per second). A lens was placed in front of the modulator to project IR radiation onto the modulator’s aperture. Between the BB and the lens there was a tube connected to the CO2 cylinder filled with the compressed gas. The CO2 gas was observed based on the thermal contrast caused by the strong attenuation of radiation in MWIR range.
The SLM modulator was manufactured with a previously prepared script written in MATLAB software. The result of the developed program was SLM file saved as an image in the slm.png format. Next, the target dimension of the SLM (16 cm radius) were set in the GIMP software [21]. The slm.png was imported into the online converter files – reaconverter, whose purpose was to convert the slm.png file into a file in the gerber format widely used in PCB production [22]. In the next step, the script drill_generator.m was used to generate the drilling information for the PCB production. The purpose of the script was to prepare a drilling holes document that complies with the guidelines for the Excellon 2 format – Fig. 6b [23]. The production of the SLM modulator from aluminum was outsourced to an external company. The drilled holes diameter was set at 0.3 mm – Fig. 6c.
SLM modulators were made of photographic film and aluminum thin plate as presented in Fig. 7. The dimensions of these 2 SLMs are identical and both were used in the experiments. The diameter in both cases was Ø = 16 cm. The aluminum modulator has a low emissivity value and introduces signal distortions. For this reason, no tests were carried out with an aluminum modulator. It was presented as an alternative modulator solution for future research. In both produced SLMs, the Hadamard pattern matrix was used to modulate spatially the radiation coming from an object. An important feature of the Hadamard matrix is its cyclicity. In result, shifting the SLM matrix by one pixel preserves the Hadamard template. The size of a single aperture on the SLM disk was 31 × 29. The size of the entire Hadamard matrix was 899 × 899 with rows defining each aperture of the SLM. The Hadamard matrix was generated using the twin-prime numbers algorithm [17].
3. Results
In order to evaluate the NETD parameter, the histograms were calculated for long sequences of output samples. Recording these sequences were made using the system shown in Fig. 3. Examples of the histograms with and without filter are presented in Fig. 8. They show measured voltage distribution of the recorded sequence of 32,768 samples of the output signal.
Quantitative results presenting the statistical parameters of the recorded data and estimated NETD values for experimental data with and without a filter mounted next to the detector are summarized in the tables 1 and 2. As expected, the average output signal grows with the BB temperature while its standard deviation for the detector with the narrow band filter remains almost the same. It denotes that the noise level does not affect the NETD of the IR system with filter significantly. Removing the filter placed in front of the detector increases noise in the high BB temperature range. This effect can be explained by strong radiation attenuation of the filter almost in the entire wavelength bandwidth of the detector absorption characteristic. Increasing the BB temperature causes the strong air movement due to the natural convection near the radiation surface and in consequence it increases the noise of the incoming signal.
On the other hand, the value of NETD is much lower for the system without filter. This an obvious conclusion as the signal and its derivative is much higher. The derivative which is in the denominator in the equation (1) can be roughly estimated in Fig. 9 presenting the dependence of the output voltage signal of the detector vs. temperature of the BB. In addition, Fig. 9 shows
Fig. 7. Two types of SLMs – from the left made of photographic film and on the right made of aluminum
Rys. 7. Dwa rodzaje modulatorów SLM – po lewej wykonany z kliszy fotograficznej, po prawej z aluminium
a) b)
Fig. 8. Measured output voltage histograms for the single-detector: a) with IR filter and BB temperature of 100 °C; b) and without IR filter and BB temperature of 50 °C
Rys. 8. Histogramy zmierzonego napięcia wyjściowego na pojedynczym detektorze: a) z filtrem IR i temperaturą BB 100 °C; b) oraz bez filtra IR i temperatury BB 50 °C
Table 1. Output Voltage, standard deviations, and NETD parameters for a system with single detector and IR Filter
Tabela 1. Wartości średnie napięcia wyjściowego, odchylenia standardowe i parametry NETD dla systemu z p ojedynczym detektorem i filtrem IR
Temp. BB (°C)
Average voltage (V)Standard deviation (V)
(K)
both the curves of the output signal vs. temperature of the BB for the experiments with and without filter. In result, it allows to compare the both levels of the output voltage and estimate the average system sensitivities in both cases. It can be noticed that the sensitivity changes nonlinearly and is higher for higher BB
temperature. This is the reason why the NETD becomes lower for higher temperature of the observed scene. The single-pixel system with an MWIR detector with transimpedance amplifier generates negative and positive voltages.
Figure 9 shows the dependence of the detector output voltage vs. of BB temperature. Each point is the average value of the detector output voltage measured over time.
The approximation function for the output voltage detector without a filter takes the form:
Fig. 9. Output voltage measured on a single-detector with and without IR filter for different BB temperature
Rys. 9. Napięcie wyjściowe mierzone na pojedynczym detektorze z filtrem IR oraz bez filtra IR dla różnych temperatur BB
In contrast, the approximation function for the output voltage detector with the filter:
Table 2. Output Voltage, standard deviations, and NETD parameters for a system with single detector without IR Filter
Tabela 2. Wartości średnie napięcia wyjściowego, odchylenia standardowe i parametry NETD dla systemu z p ojedynczym detektorem bez filtra IR
and the derivative of the function:
In both cases the coefficient of determination (R2) of the approximating functions is R2 > 0.999.
In Figure 10 shows the quantitative results of the NETD parameter for the system with a single MWIR. The NETD
analysis was performed for the measurement system with and without the IR filter. It can be seen that the use of the filter significantly worsens the NETD (Table 1, 2 and Fig. 10). It turns out that the filter significantly attenuates the signal. For the system with a filter, the NETD level becomes acceptable above the BB temperature of 220 °C and is 117.43 mK. For a system without filter, as the background temperature increases, the NETD improves. At a temperature of 30 °C the NETD is 155.80 mK and for the maximum tested BB temperature of 150 °C the NETD is 24.38 mK.
Finally, the sample IR images taken with the single detector system for different BB temperature are presented in Fig. 11. Detection of CO2 gas below a background temperature of 200 °C becomes almost impossible. There is too much noise in the image, preventing proper gas identification as it is visible in Fig. 11c.
It has to be noticed that the low-cost SLM modulator made of photographic film is a weakest element of the SPC system for gas detection. It is not perfectly flat and it can bend during rotation. Moreover, the system requires the very precise control and stabilization of the rotation speed of the SLM and the precise synchronization of the SLM rotation with the signal acquisition. The narrow band IR filter attenuates the incoming radiation and in result it deteriorates the sensitivity of the system with decrease of NETD simultaneously.
Fig. 10. NETD parameter for the single MWIR detector with and without filter
Rys. 10. Parametr NETD dla pojedynczego detektora MWIR z filtrem i bez filtra
11. Example of IR image with a
Fig
11. Przykładowe
4. Conclusion
Gas detection and measurement of the concentration can be implemented using IR system equipped with the narrow-band interference filter with the spectral characteristic correlating to the gas absorption. Single-pixel imaging technique is a cost-effective solution allowing to exchange the filter to detect different gas atmospheres. The main problem of such a technique is the background temperature that sometimes must be high. In practice it limits the field of applications, especially while using it in the explosive environment. The right solution is to select the highly sensitive IR system with low value of the NETD parameter. In this research we presented a simple method of NETD assessment that can be implemented in-house by the user of an infrared system. It only requires a heat source (e.g. the black body) with adjustable temperature. The presented results confirmed importance of the noise and the sensitivity characteristics of the IR system used for gas detection. These parameters has an impact on the background temperature during the gas detection that can often be above 100 °C. The narrow-band filter that is an important part of the system that reduces the NETD parameter significantly. In the presented research the IR system without any filter had NETD = 157 mK@30 °C and NETD = 1190 mK@80 °C while narrow-band was used. When background temperature was increased, the NETD figures become much better achieving NETD = 117 mK@220 °C and NETD = 24 mK@150 °C for the system with and without radiation filtering. It has to be underlined that these results were obtained for the cooled 1 × 1 mm2 MWIR sensor equipped with the immersive integrated lens and 4-stage thermoelectric cooler allowing to diminish the detector temperature to about –40 °C. Such a detector can be successfully used for CO2 detection and the concentration measurement using single-pixel imaging when the background temperature is above 200 °C. Single detector systems are used among others in medical imaging, petrochemistry and gas leak detection.
References
1. Więcek B., De Mey G., Termowizja w podczerwieni podstawy i zastosowania, Wydawnictwo PAK, Warszawa 2011, 103–130, ISBN 978-83-926319-7-2, 29–32.
2. Gogler S., Sawicki K., Ligienza A., Mścichowski M., Metoda pomiaru minimalnej rozróżnialnej różnicy temperatury w funkcji powiększenia i rozogniskowania kamery termowizyjnej, „Pomiary Automatyka Robotyka”, R. 28, Nr 2, 2024, 99–106, DOI: 10.14313/PAR_252/99.
3. Mścichowski M., Sawicki K., Sosnowski T., Firmanty K., Kastek M., Bareła J., Metoda pomiaru parametrów kamer termowizyjnych za pomocą zautomatyzowanego stanowiska pomiarowego, „Pomiary Automatyka Robotyka”, R. 28, Nr 3, 2024, 131–138, DOI: 10.14313/PAR_253/131.
4. Olbrycht R., A novel method for sensitivity modelling of optical gas imaging thermal cameras with warm filters, “Quantitative InfraRed Thermography Journal”, Vol. 19, No. 5, 2022, 331–346, DOI: 10.1080/17686733.2021.1962096.
5. Szajewski K., Szajewska A., Urbaś S., Więcek B., Review on infrared single-pixel imaging, “Opto-Electronics Review”, Vol. 33, No. 2, 2025, DOI: 10.24425/opelre.2025.154306.
6. Gibson G.M., Johnson S.D., Padgett M.J., Single-pixel imaging 12 years on: a review, “Optics Express”, Vol. 28, No. 19, 2020, 28190–28208, DOI: 10.1364/OE.403195.
7. Wang Y., Huang K., Fang J., Yan M., Wu E., Zeng H., Mid-infrared single-pixel imaging at the single-photon level, “Nature Communications”, Vol. 14, 2023, DOI: 10.1038/s41467-023-36815-3.
8. Duarte M.F., Davenport M.A., Takhar D., Laska J.N., Sun T., Kelly K.F., Single-pixel imaging via compressive sampling, “IEEE Signal Processing Magazine”, Vol. 25, No. 2, 2008, 83–91, DOI: 10.1109/MSP.2007.914730.
9. Tissot J.L., Uncooled infrared detectors: state of the art, VII Krajowa Konferencja Termografia i Termometria w Podczerwieni TTP 2006, Ustroń-Jaszowiec, 16–18 listopada, 2006, 9–23.
10. Yoon T., Kim C.-S., Kim K., Choi J., Emerging applications of digital micromirror devices in biophotonic fields, “Optics & Laser Technology”, Vol. 104, 2018, 17–25, DOI: 10.1016/j.optlastec.2018.02.005.
11. Carlos Osorio Quero, Daniel Durini, Jose Rangel-Magdaleno, Jose Martinez-Carranza, and Ruben Ramos-Garcia, Deep-learning blurring correction of images obtained from NIR single-pixel imaging, “Journal of Optical Society of America A”, Vol. 40, No. 8, 2023, 1491–1499, DOI: 10.1364/JOSAA.488549.
12. Nobunaga T., Tanaka H., Tadokoro Y., Reconstruction for Spatially Distributed Single-Pixel Imaging Based on Pattern Filtering, “IEEE Signal Processing Letters”, Vol. 25, No. 5, 2018, 705–709, DOI: 10.1109/LSP.2018.2816579.
13. Urbaś S., Więcek B., Application of a deep-learning neural network for image reconstruction from a single-pixel infrared camera, “Opto-Electronics Review”, Vol. 32, No. 1, 2024, DOI: 10.24425/opelre.2024.148877.
14. Song K., Bian Y., Wang D., Li R., Wu K., Liu H., Qin C., Hu J., Xiao L., Advances and Challenges of Single-Pixel Imaging Based on Deep Learning, “Laser & Photonics Reviews”, Vol. 19, No. 7, 2025, DOI: 10.1002/lpor.202401397.
15. Minkina W., Dudzik S., Infrared Thermography, Errors and Uncertainties, Częstochowa University of Technology, 2009.
Wyznaczanie wartości parametru NETD systemu obrazowania z pojedynczym detektorem MWIR do detekcji CO2
Streszczenie: W pracy przedstawiono eksperymentalną ocenę parametru NETD dla systemu podczerwieni MWIR opracowanego do wykrywania gazów przy użyciu techniki obrazowania jednopikselowego. W systemach obrazowania gazów często stosowane jest filtrowanie wąskopasmowe w celu zwiększenia kontrastu, co znacznie zmniejsza energię promieniowania i pogarsza charakterystykę sygnału względem szumu. Opracowany system przetestowano pod kątem wykrywania CO2 w paśmie fal średniej podczerwieni (MWIR). Przedstawione wyniki potwierdziły eksperymentalnie wyższą wartość parametru NETD dla układu wyposażonego w filtr interferencyjny. Parametr NETD oceniano przy użyciu prostego stanowiska pomiarowego z ciałem czarnym, co pozwalało na wybór właściwej temperatury tła. Uzyskane wyniki potwierdzają znaczenie temperatury tła w procesie detekcji, której wartość jest istotna przy wyznaczaniu czułości i poziomu szumów systemu, tłumienia promieniowania elementów optycznych i charakterystyki widmowej wykrywanego gazu.
Sebastian Urbaś, MSc Eng. sebastian.urbas@dokt.p.lodz.pl
ORCID: 0000-0002-7699-5425
He graduated with an engineering degree in computer science in 2019 from the University of Academy of Social and Media Culture in Toruń. In 2021 he received a master’s degree in electronics from the Lodz University of Technology. Currently, he is a PhD student at the Lodz University of Technology. The main areas of interest are embedded electronics, computer thermography, signal and image processing and development of IR systems., PLC and SCADA systems.
Prof. Bogusław Więcek, DSc PhD Eng. boguslaw.wiecek@p.lodz.pl
ORCID: 0000-0002-5003-1687
Prof. Bogusław Więcek is the head of the Department of Electronic Circuits and Thermography at the Institute of Electronics of the Lodz University of Technology. He specializes in computer thermography and modeling of thermal problems in electronic systems. He is a member of the scientific committee of the international Conference on Quantitative Infrared Thermography (QIRT) and chairman of the Conference on Infrared Thermography and Thermometry organized periodically in Poland.
Robert Olbrycht, PhD Eng. robert.olbrycht@p.lodz.pl
ORCID: 0000-0001-9842-2815
He received the PhD degree in electronic engineering from the Lodz University of Technology, Lodz, Poland, in 2012. He is currently an Assistant Professor of Electronics with the Institute of Electronics, Lodz University of Technology. He has published papers on optical gas imaging with thermal imaging cameras and applications of thermography for industrial purposes.
Sebastian Urbaś, Robert Olbrycht, Bogusław Więcek
Projekt i wykonanie bezzałogowego statku powietrznego (BSP) typu oktokopter do akwizycji danych ze środowiska podwodnego sonarem Ping 360
Jakub Tkaczyk, Maciej Tyszecki, Jacek Jabłoński, Paweł Piskur Akademia Marynarki Wojennej im. Bohaterów Westerplatte, Wydział Mechaniczno-Elektryczny, Katedra Automatyki Okrętowej, ul. Śmidowicza 69, 81-127 Gdynia
Streszczenie: W artykule omówiono projekt, budowę oraz testy bezzałogowego statku powietrznego (BSP) przeznaczonego do zastosowań morskich. Konstrukcja BSP obejmuje specjalnie opracowane pływaki, umożliwiające unoszenie się na powierzchni wody. BSP został zaprojektowany do pozyskiwania danych w toni wodnej za pomocą sonaru Ping360. Sterowanie odbywa się za pomocą dedykowanego kontrolera zdalnego, a alternatywnie BSP może realizować autonomiczne misje według zaprogramowanego scenariusza. Dane sonarowe są przesyłane w czasie rzeczywistym do operatora przy stacji naziemnej, co umożliwia ich bieżącą analizę. W artykule szczegółowo omówiono kolejne etapy projektowania i budowy, w tym konstrukcję ramy i pływaków, architekturę systemu oraz warstwę elektroniczną i sprzętową. W końcowej części zaprezentowano wyniki analizy parametrów lotu, uzyskane zarówno podczas testów nad lądem, jak i w warunkach morskich.
Słowa kluczowe: bezzałogowy statek powietrzny (BSP), lądowanie na wodzie, bezzałogowy system morski (BSM), sonar, systemy autonomiczne, sterowanie zdalne, transmisja danych, pływaki
1. Wprowadzenie
Bezzałogowe systemy, w szczególności statki powietrzne, stały się jednym z najczęściej wykorzystywanych narzędzi w zastosowaniach cywilnych jak i wojskowych, w każdej dziedzinie, rozpoczynając od komercyjnego wykonywania zdjęć i ujęć życia codziennego po dedykowane zastosowania bojowe oraz rozpoznawcze [1, 2]. Szczególnym przypadkiem jest sytuacja panująca na Bliskim Wschodzie [3] oraz za granicą naszego kraju, gdzie inżynierowie, konstruktorzy i operatorzy wykazali znaczenie oraz sens wykorzystania bezzałogowych statków powietrznych (BSP). Ich zastosowanie powinno sprowadzać się do możliwie największej redukcji kosztów, przy jednoczesnym zachowaniu łatwości obsługi oraz wszechstronności operacyjnej [4]. Integracja z nowoczesnymi systemami analizy danych i sztucznej inteligencji otwiera także perspektywy dla rozwoju zaawansowanych metod autonomicznej nawigacji oraz adaptacyjnego zarządzania zasobami energetycznymi w misjach długotrwałych [5]. Rozwój w kierunku wykonywania bezzało-
Autor korespondujący:
Jakub Tkaczyk, kuba.tkaczy@gmail.com
Artykuł recenzowany nadesłany 15.03.2025 r., przyjęty do druku 13.06.2025 r..
się na korzystanie z artykułu na warunkach
gowych misji jest postępujący i codziennie pojawiają się nowe rozwiązania oraz pomysły – w tym projekt pojazdu przedstawionego w artykule.
Prezentowany projekt został opracowany w ramach konkursu Ministra Obrony Narodowej na realizację projektu Bezzałogowego Systemu Powietrznego, Bezzałogowego Systemu Lądowego lub Bezzałogowego Systemu Morskiego do zastosowań związanych z obronnością i bezpieczeństwem państwa. Projekt uzyskał finansowanie, a następnie II miejsce w kategorii rozpoznawczej bezzałogowych systemów morskich, nagrodę specjalną oraz dwa wyróżnienia na tle pozostałych pojazdów prezentowanych w konkursie [18]. Właścicielem praw autorskich jest Ministerstwo Obrony Narodowej. Pojazd może lądować na wodzie, działać w portach i na morzu, monitorować dno oraz przesyłać dane sonarowe i telemetrię w czasie rzeczywistym. System jest przystosowany do pracy w różnych warunkach środowiskowych, wspierając działania z zakresu obronności i bezpieczeństwa morskiego.
2. Projekt i budowa BSP
Proces projektowania i budowy konstrukcji BSP wymaga interdyscyplinarnego podejścia obejmującego zagadnienia takie jak inżynieria lotnicza, elektronika, automatyka oraz informatyka [6]. Celem projektu było opracowanie bezzałogowego pojazdu zdolnego do szybkiego przemieszczania się w powietrzu oraz stabilnego dryfu na wodzie w celu zrealizowania pomiarów i skanowania dna morskiego za pomocą sonaru mechanicznego [7]. Bazując na wymaganiach co najmniej 25-minutowego lotu
oraz średniego poboru energii, wyznaczono pojemność baterii i maksymalną masę pojazdu wynoszącą 10,5 kg. Ze względu na potrzebę zachowania niskiej masy wybrane materiały konstrukcyjne spełniają kryteria uwzględniające lekkość, wytrzymałość oraz jednocześnie sztywność. Zaprojektowanie kadłuba BSP pk. „SHAD”, wymagało głębokiej analizy kształtu pod
Rys. 1. Model 3D Bezzałogowego Statku Powietrznego do zadań morskich „SHAD”
Fig. 1. The 3D model of Unmanned Aerial Vehicle for maritime purposes “SHAD”
kątem minimalizacji oporów powietrza i zwiększenia stabilności podczas lotu. Projekt 3D widoczny jest na rys. 1.
Optymalizacja układu napędowego pozwoliła na uzyskanie wymaganej siły ciągu zespołu napędowego, wysokiej efektywności energetycznej oraz odpowiedniej redundancji sterowania, zwiększając niezawodność pojazdu. BSP przeznaczony jest do pracy w środowisku wodnym, zatem ważne było również zaprojektowanie ramy pod kątem maksymalnej szczelności i odporności na korozje. Dedykowane pływaki dobierane były pod kątem siły wyporu przypadającej na wielkość i masę materiału. Założeniem była modułowa konstrukcja, umożliwiająca łatwą rozbudowę i modyfikację pojazdu. Modułowa komora akumulatora umożliwia szybkie wymiany źródła zasilania bez konieczności ingerowania w elementy konstrukcyjne, co znacznie minimalizuje długość przerwania pracy w przypadku wyczerpania jednego źródła zasilania.
2.1. Architektura systemu
Architektura systemu, przedstawiona na rys. 2, jest efektem połączeń licznych bloków zastosowanych w BSP. System zasilany jest pojedynczym akumulatorem litowo-polimerowym (Li-Po) o nominalnym napięciu 22,2 V, który dostarcza energię do wszystkich komponentów za pośrednictwem konwerterów napięcia. Komponenty komunikują się ze sobą za pomocą kontrolera lotu OrangeCube+ [9]. Kontroler lotu przekazuje i wymienia informację między sensorami oraz odbiornikami sygnałów za pomocą połączeń kablowych i komunikacji szeregowej.
Wbudowane sensory, zintegrowane z autopilotem oraz odbiornikami GPS, obejmują łącznie: pięć akcelerometrów, pięć żyroskopów, cztery barometry oraz trzy magnetometry. Wszystkie dane są na bieżąco przetwarzane przez system autopilota, który na podstawie obliczonej średniej wartości dokonuje korekt związanych ze stabilizacją lotu, ruchem oraz sterowaniem. Operacje polegające na uśrednianiu sygnałów pomiarowych przyczyniają się do zwiększenia precyzji i dokładności wyników. W wybranych trybach lotu system ten jest zdolny do podejmowania samodzielnych decyzji. System wyposażono w dwa odbiorniki GPS z wbudowanymi sensorami, odbiornik fal radiowych oraz odbiornik aparatury zdalnego sterowania. Dodatkowo w układzie zamontowany jest mikrokomputer Raspberry Pi 4B, odpowiedzialny za zarządzanie sonarem, akwizycję danych oraz bez-
Rys. 2. Architektura systemu BSP „SHAD”
Fig. 2. System Architecture UAV “SHAD”
przewodowe przesyłanie informacji do operatora. Zintegrowany system komputerowy umożliwia rozpoczęcie rejestracji danych, natomiast moduł łączności Wi-Fi zapewnia zdalny dostęp i kontrolę nad wykonywanymi zadaniami. System programowania misji autonomicznych wykorzystuje środowisko Mission Planner, które stanowi panel operatorski służący do zarządzania wszystkimi funkcjami pojazdu. Środowisko to umożliwia prezentację i zarządzanie danymi związanymi z telemetrią, przebiegiem misji oraz funkcjonowaniem pojazdu. Ponadto pozwala na integrację z autopilotem BSP, zapewniając pełną kontrolę oraz bieżący monitoring danych [9].
2.2. Komponenty układu wykonawczego
Projekt BSP opiera się na urządzeniach kompatybilnych z rodziną ArduPilot. Kontroler OrangeCube+ wybrano ze
Tabela 1: Specyfikacja techniczna BSP
Table 1. Technical specification of BSP
Parametr Wartość
Masa 10,5 kg
Długość lotu 25 minut
Maks. stan morza 2–3
Rodzaj nawigacji GPS, GLONASS, Galileo
Liczba barometrów 4
Liczba magnetometrów 3
Liczba żyroskopów 5
Liczba akcelerotmetrów 5
Ładowność 1–2 kg
Zasięg komunikacji 3000 m
Zasięg kontrolera 1000 m
względu na wydajność i moc obliczeniową, niezbędną do realizacji misji wymagających jednoczesnej obsługi wielu urządzeń. W jego skład wchodzą trzy niezależne jednostki IMU, z których każda zawiera wbudowany magnetometr AK09916, akcelerometr wraz z żyroskopem model ICM20649 oraz dwa barometry MS5611, które służą do określania kursu, położenia i wysokości. Dwa odbiorniki GPS zawierają dodatkowe sensory: dwa akcelerometry zintegrowane z żyroskopem w module
Tabela 2. Wykaz komponentów pojazdu
Table 2. List of vehicle components
Komponent
Nazwa
Tkaczyk, Maciej Tyszecki, Jacek Jabłoński, Paweł Piskur
ICM42688, dwa dodatkowe moduły barometru MS5611 oraz dwa czujniki pola magnetycznego RM3100. System autopilota analizuje średnie wartości ze wszystkich dostępnych sensorów, obsługuje każdą jednostkę pomiarową i oblicza wartości uśrednione na podstawie zebranych danych. Podwojenie modułów GPS (rys. 3) zwiększa dokładność określania pozycji i zapewnia redundancję dzięki rozszerzonej liczbie źródeł danych. System obsługuje wiele standardów nawigacji satelitarnej, w tym GNSS, Galileo oraz GLONASS, a także umożliwia pozycjonowanie z dokładnością do kilku centymetrów dzięki wykorzystaniu technologii RTK.
Bezzałogowy statek powietrzny o masie 10,5 kg wymaga odpowiedniego bilansu energetycznego, który zapewni wymagany czas lotu wynoszący 20–25 minut. Szczegółowa specyfikacja techniczna pojazdu znajduje się w tabeli 1. Każdy z ośmiu silników musi udźwignąć około 1,45 kg przy 50 % mocy [10]. W układzie napędu zastosowano jednostki MAD 5008 IPE V3. Charakteryzują się parametrem 340 KV, gdzie KV to jednostka określająca stałą prędkościową silnika, która wskazuje liczbę obrotów na minutę (RPM) przypadającą na każdy wolt napięcia zasilania przy pracy bez obciążenia. Taki dobór pozwala na efektywne wykorzystanie napięcia z źródła zasilania [11]. Analiza potrzebnej mocy oraz pojemności baterii doprowadziła do wyboru akumulatora GensAce Tattu o pojemności 22 000 mAh. Są to baterie o współczynniku 30C, zapewniają odpowiednią moc dla systemów 6S z napięciem 22,2 V (3,7 V na ogniwo), gwarantując zapas energii niezbędny do wykonania misji. Baterię można bezpiecznie ładować prądem 10 A, co umożliwia pełne naładowanie w zakresie 20–100 % w ciągu godziny. Masa baterii wynosząca 2460 g stanowi 23,42 % całkowitej masy BSP i została umiejscowiona centralnie pod ramą statku powietrznego, co pozwala na obniżenie środka ciężkości.
Zespół napędowy składa się z trzech głównych elementów: śmigła, silnika oraz regulatora. Każdy z ośmiu silników MAD 5008 IPE V3 340 KV wymaga dostarczenia odpowiedniej energii, by udźwignąć 1,45 kg przy 50 % mocy. Silnik ma stopień
Parametry
Autopilot OrangeCube+ CPU STM32H743, 3 × IMU, 14 PWM, magnetometr
Rys. 3. Widok na kontroler lotu oraz odbiorniki GPS
Fig. 3. View of the flight controller and GPS receivers
ochrony IP45, co zapewnia jego odporność na pył i bryzganie wodą, gwarantując niezawodność w trudnych warunkach [12].
Parametry silnika oraz jego współpracę z kontrolerem zapewniają regulatory MAD AMPX 40A PRO, które charakteryzują się prądem roboczym 40 A. Regulatory zostały uszczelnione, aby chronić je przed wilgocią podczas dryfu oraz lotów w trudnych warunkach hydrometeorologicznych. Śmigła statku powietrznego wykonano z kompozytowego włókna węglowego, co zapewnia im lekkość i wytrzymałość. Mają one wielkość 18 cali i są składane – siła odśrodkowa podczas pracy ustawia łopatki prostopadle do osi obrotu, zapewniając optymalną wydajność napędu [13]. Szczegółowy wykaz komponentów przedstawiono w tabeli 2. Wszystkie elementy systemu komunikują się za pomocą połączeń szeregowych między autopilotem, jego interfejsem wejść/ wyjść oraz mikrokomputerem. Kontroler lotu ma rozbudowane interfejsy oraz panel konfiguracyjny, umożliwiający dostosowanie aparatury i planowanie misji.
2.3. System komunikacji
Pojazd wykorzystuje szereg odbiorników i nadajników, zapewniając redundancję w zakresie łączności. Komunikuje się za pomocą łączności radiowej oraz mikrofalowej [14]. Zdalne sterowanie realizowane jest przez aparaturę Futaba, model 14SG, skomunikowaną z pojazdem za pomocą odbiornika Futaba R7008R. Odbiornik radiowy RFD868 MHz, działający w zakresie 868–900 MHz, dostarcza dane telemetryczne do 20 km od stacji operatorskiej. Niższa częstotliwość oznacza większą długość fali, co zwiększa skuteczność transmisji na dużych odległościach. Odbiornik mikrofalowy pracuje na częstotliwości 2,4 GHz, co pozwala na kontrolę na odległość 1000 m od operatora. Wyższe częstotliwości, jak 2,4 GHz, oferują lepszą przepustowość w mniejszym zasięgu, co wpływa na szybkość transmisji danych telemetrycznych. Schemat połączeń oraz użyte urządzenia przesyłu danych znajdują się na rys. 4.
Rys. 4. Podzespoły do komunikacji ziemia-powietrze (operator-BSP) Fig. 4. Ground-to-air communication components (operator-UAV)
Dzięki zastosowaniu różnych pasm częstotliwości w komunikacji radiowej i mikrofalowej, system zapewnia optymalizację zarówno w zakresie zasięgu, jak i jakości transmisji. Odbiorniki działające w pasmach o niższej częstotliwości, umożliwiają bardziej stabilną komunikację na większych odległościach, co jest istotne w kontekście operacji wymagających daleko-zasięgowej transmisji danych. Z kolei wyższe pasma, wykorzystywane przez aparaturę pozwalają na przesyłanie większych ilości danych w krótszym czasie, takich jak sterowanie w czasie rzeczywistym. Zwiększenie niezawodności systemu łączności przez redundancję sprzętową pozwala na większą odporność na awarie, co jest szczególnie ważne w kontekście misji wymagających długotrwałej i niezawodnej operacji pojazdu.
2.4. Sonar jako narzędzie do obrazowania dna morskiego
Sonar umiejscowiony pod BSP jest głównym sensorem wykonawczym (rys. 5) do pomiaru dna morskiego [15, 16]. Zamontowany jest on pod kątem 10°, a głowica o silniku krokowym zapewnia regulację obszaru skanowania (rys. 10). Wysokość fali
hydroakustycznej generowanej przez sonar to 25°, a szerokość pojedynczej wiązki wynosi 2°. Głowica jest wyposażona w silnik krokowy, który powoduje, że zakres skanowania może być programowalny. Za pomocą generatora fal hydroakustycznych i nadajnika mierzącego czas odbicia fali i powrotu do odbiornika potrafi on generować obrazy środowiska podwodnego. Możliwe jest to dzięki dużej prędkości dźwięku w wodzie mieszczącej się w zakresie 1450–1570 m/s w zależności od charakterystyki zbiornika wodnego, zasolenia, poziomu zanieczyszczeń oraz temperatury. System pracuje domyślnie z częstotliwością roboczą wynoszącą 750 kHz. Rozdzielczość wynosi 0,08 % odległości od dna, co w praktyce przekłada się na dokładność rzędu 4,1 cm dla obiektów oddalonych o 50 metrów. Sonar ma ustawienia możliwe do zmiany przez użytkownika. Przedstawione one są na rys. 6. W przypadku większych odległości dokładność pomiarów może ulec pogorszeniu ze względu na tłumienie energii fali oraz interferencję fal hydroakustycznych w środowisku wodnym.
Rys. 6. Ustawienia możliwe do zdefiniowania przez użytkownika w aplikacji PingViewer
Fig. 6. Settings that can be defined by the user in the PingViewer application
Sonar zasilany jest napięciem 11–18 V, a jego moc wyjściowa wynosi 5 W. Zasilanie to realizowane jest za pośrednictwem przetwornicy prądu stałego, podłączonej bezpośrednio do głównego źródła zasilania pojazdu. Dodatkowy mikrokomputer jednopłytkowy Raspberry Pi 4B, oparty na układzie Broadcom BCM2711 z 64-bitowym, czterordzeniowym procesorem ARM Cortex-A72 taktowanym zegarem 1,5 GHz, odpowiada za rejestrowanie danych sonarowych w czasie rzeczywistym. Wbudowany moduł łączności bezprzewodowej w standardzie Wi-Fi 5G umożliwia zdalne połączenie z mikrokomputerem, na którym uruchamiana jest aplikacja PingViewer służąca do rozpoczęcia nagrywania, rejestracji i podglądu danych sonarowych w czasie rzeczywistym.
3. Wykonanie konstrukcji BSP
Główna część konstrukcji, tj. rama BSP (rys. 7) składa się z dwóch płyt, szesnastu rur przeznaczonych na ramiona, czterech rur stanowiących podwozie oraz z łączników i elementów montażowych, które zostały częściowo wydrukowane w technologii druku 3D. Bazę ramy stanowią dwie płyty z włókna szklanego, będące elementarną częścią konstrukcji drona. Zostały one zaprojektowane w taki sposób, aby po wycięciu zawierały gotowe otwory montażowe dla wszystkich podzespołów. Obie płyty mają promień 400 mm i grubość 1 mm.
Rys. 8. Oznaczenia: (1) Silnik, (2) Podstawa mocująca, (3) Łącznik ramienia zamontowany na pojeździe
Fig. 8. Labels: (1) Motor, (2) Mounting base, (3) Arm connector mounted on the vehicle
Ramiona wykonane są z rur z lekkiego stopu aluminium stosowanego w modelarstwie lotniczym (np. do budowy zdalnie sterowanych śmigłowców). Konstrukcja obejmuje osiem rur o długości 630 mm stanowiących główne ramiona, osiem wsporników łączących silniki o długości 450 mm oraz cztery rury podwozia o długości 350 mm. Wszystkie rury mają średnicę wewnętrzną 20 mm i zewnętrzną 21,5 mm.
Przedstawiony na rys. 8 łącznik ramienia pełni funkcję elementu mocującego zarówno płyty nośne, jak i uchwyty silników, które wykonano z frezowanych płytek. Łączniki ramion zostały zaprojektowane w środowisku AutoCAD – część z nich wydrukowano w technologii druku 3D, a część wykonano metodą frezowania z litego materiału. Wybór technologii wykonania
zależał od obciążeń działających na dany element: komponenty narażone na większe drgania i naprężenia wykonano w sposób frezowany ze względu na ich wyższą wytrzymałość mechaniczną. Dla ograniczenia masy całkowitej pojazdu pozostałe łączniki zostały wydrukowane z wypełnieniem 30 %, co pozwoliło znacząco zmniejszyć ich masę.
Konstrukcja BSP ma postać modułową, co umożliwia dalsze modyfikacje i rozwój. Taka architektura pozwala na integrację nowych komponentów oraz dostosowanie systemu do zmieniających się wymagań operacyjnych. Modułowa budowa umożliwia szybkie przezbrojenie statku powietrznego w dodatkowe sensory, systemy komunikacyjne lub narzędzia analityczne, co czyni go wszechstronną platformą do różnych zastosowań. Gotowa konstrukcja została zaprezentowana na rys. 9.
Materiał, z którego przygotowano pływaki do lądowania na wodzie, spełnił założone kryteria wypornościowe. Wstępne testy przeprowadzono z wykorzystaniem alternatywnego materiału PET, który okazał się podatny na odkształcenia spowodowane naporem wody oraz na wyginanie podczas lądowania. Zastosowanie polistyrenu ekspandowanego (EPS) przyniosło lepsze rezultaty – materiał ten był lżejszy i umożliwiał łatwe formowanie do zaprojektowanego kształtu. W tym przypadku zdecydowano się na kształt walca, który zapewnia korzystne właściwości opływowe zarówno w powietrzu, jak i w wodzie. Przeprowadzone testy wykazały, że obecność pływaków nie wpływa negatywnie na właściwości lotne pojazdu, a ich objętość umożliwia skuteczne utrzymanie pojazdu na powierzchni wody.
4. Wyniki z testów
Przykładowy podgląd danych sonarowych przedstawia rys. 10 oraz rys. 11 na którym wykryto dno morskie w odległości pięciu metrów od sonaru. Pierwszy rysunek przedstawia testy wykonywane statycznie, podczas prób działania sonaru. Warto zwrócić uwagę na kształt dna na drugim rysunku. Falowanie wynika z nierówności podłoża morskiego, ponieważ w tym przypadku wykonywanych testów stan morza wynosił 1. Fala morska nie miała wpływu na pomiar i sonar skutecznie wykrył nierówność wynikającą z ukształtowania dna zbiornika wodnego. Mimo że pojazd poddawany był łagodnym warunkom podczas ćwiczeń i testów, to planowane jest sprawdzenie wytrzymałościowe, pod względem odporności na warunki
Rys. 9. BSP „SHAD” podczas wykonywania pomiarów sonarem Fig. 9. UAV “SHAD” during sonar measurement operations
atmosferyczne i falowanie podczas stanu morza 3–4. Sonar rejestruje i nagrywa wszystkie dane na dysku lokalnym komputera operatorskiego, a następnie pozwala na ich odtwarzanie. Oprócz możliwości rejestrowania oraz odczytu dedykowana aplikacja ma funkcję kalibracji sonaru Ping360 w kilku zakresach, m.in. częstotliwości, szerokości kątowej skanowania, sile sygnałów czy długości wiązki hydroakustycznej. Poniższe przykłady wykonane zostały przy parametrach: odległość pomiarowa 10 metrów, wzmocnienie sygnału ustawione na „Low”, a częstotliwość fal hydroakustycznych emitowanych przez nadajnik na 750 kHz. Kontroler lotu oprócz przesyłania telemetrii w czasie rzeczywistym do operatora wykonuje również rejestrację wszystkich informacji i danych zbieranych podczas wykonywania misji [17].
10. Podgląd danych sonarowych podczas prób
during tests
Rys. 11. Podgląd danych sonarowych w aplikacji PingViewer
11. Preview of sonar data in the PingViewer application
Testy wykonywane podczas budowy pojazdu wykazały kilka znaczących jego cech. Wykreślanie charakterystyk poszczególnych parametrów pozwoliło na szczegółową analizę danych. Zakładana stabilność lotu, zmiany położenia w przestrzeni oraz czas utrzymywania się w powietrzu potwierdziły liczne dane zebrane przez sensory systemu – żyroskopy, akcelerometry, magnetometry oraz barometry. Przedstawione wykresy na rys. 12 oraz rys. 13 przedstawiają wartości zarejestrowane przez żyroskop w osi Y skorelowany z wysokością BSP w czasie, na których możemy zauważyć procedurę startu z lądu oraz lądowania na wodzie. Zmiany w charakterystyce wysokościomierza, wskazujące na rozpoczęcie i zakończenie manewru, korelują z wartościami żyroskopu, które odzwierciedlają stabilność pojazdu w tych momentach. Analiza wykresów potwierdza, że zarówno start, jak i lądowanie na wodzie przebiegały płynnie, bez zakłóceń a pobór prądu nie osiągał wartości maksymalnej. Warto zwrócić uwagę na końcowy fragment wykresu na rys. 12, na którym możemy zauważyć falowanie wykresu po wylądowaniu na wodzie – jednoznaczne jest to z falowaniem pojazdu utrzymującego się na powierzchni wody.
Rys. 12. Charakterystyka danych żyroskopu w osi Y oraz barometrów podczas lądowania na wodzie
Fig. 12. Gyroscope data characteristics in the Y-axis and barometer data during water landing
Rys. 13. Charakterystyka danych z żyroskopu w osi X oraz barometrów podczas startu z wody
Fig. 13. Gyroscope data characteristics in the X-axis and barometer data during water take-off
Rys. 14. Średnie natężenie prądu w układzie na podstawie danych z pięciu lotów
Fig. 14. Average current intensity in the system based on data from five flights
Rys.
Fig. 10. Preview of sonar data
Fig.
Rys. 15. Średnie napięcie źródła zasilania na podstawie danych z pięciu misji
Fig. 15. Average voltage of the power source based on data from five missions
Wartości falowania są dużo większe niż dane zebrane podczas wykonywania ruchu w powietrzu czy operacji lądowania, co potwierdza stabilność BSP zakładaną w projekcie. Znaczącym parametrem jest również średnia wartość natężenia prądu w układzie. Na jej podstawie ocenić można wpływ wiatru na BSP lub stabilność układu. Wykres na rys. 14 przedstawia wartość natężenia prądu na podstawie pięciu lotów wykonanych w różnych warunkach środowiskowych i atmosferycznych. Średnia z wykresu to 49 A. Zakres napięcia przedstawia rys. 15. Nagły spadek wynika z obciążenia układu po uruchomieniu zespołu napędowego pojazdu. Po uniesieniu się nad powierzchnię następuje na akumulatorze zmiana napięcia oraz wzrost natężenia prądu. Minimalne napięcie wynosi 20,8 V, przy którym system informuje o braku zasilania i rozpoczyna okresowo informować o kończącej się energii.
Kalibracja regulatorów PID pozwoliła na zniwelowanie obecności nadmiernych wibracji, poprawę stabilności lotu za pomocą regulatorów P, I oraz D znajdujących się przed silnikiem. Regulator odpowiedzialny jest za sterowanie prędkością obrotową rotora przez regulację natężenia pobieranego prądu. Wykonanie procedury kalibracji PID pozwala na dostosowanie parametrów regulatora do rodzaju konstrukcji, jego masy, symetrii obciążenia oraz budowy. Wykresy na rys. 16 przedstawiają wartości żyroskopu przed wykonaniem kalibracji. Diagram na
Fig. 16.
data before performing the motor controller calibration
Rys. 17. Dane z żyroskopu po wykonaniu kalibracji regulatorów
Fig. 17. Gyroscope data after performing the motor controller calibration
rys. 17 obrazuje charakterystykę danych z żyroskopu zarejestrowaną podczas lotu po kalibracji. Warto zaznaczyć, iż loty były wykonywane w krótkim odstępie czasu – przed i po kalibracji. Analiza porównawcza tych dwóch wykresów daje obraz, jaki wpływ ma kalibracja na pozycjonowanie w przestrzeni pojazdu oraz jego stabilizację w powietrzu. Duża zmiana, zauważalna na wykresie żyroskopu z osi X oznacza, iż pojazd po kalibracji zniwelował większość uchybów podczas ruchu, jak i utrzymywania pozycji. Jednoznacznie oznacza to poprawę stabilizacji i utrzymywanie prawidłowego poziomu w każdej z osi. Wykresy z pozostałych osi również uległy wypłaszczeniu i osiągają mniejsze wartości względem niedostrojonego regulatora.
5. Podsumowanie i kierunki dalszych prac
Oktokopter, dzięki swojej otwartej i modułowej konstrukcji, stanowi nowoczesne narzędzie do testów i badań, wspierając rozwój wiedzy i umiejętności w zakresie technologii lotniczych jak i morskich. Może być wykorzystywany zarówno w akademickich badaniach nad aerodynamiką i autonomią lotu, jak i w szkoleniach operatorów systemów bezzałogowych. Jego adaptacyjna architektura umożliwia prowadzenie eksperymentów nad nowymi metodami sterowania, optymalizacją trajektorii lotu oraz testowaniem innowacyjnych rozwiązań w zakresie napędu i zasilania.
W perspektywie długoterminowej planowany jest rozwój jednostki w kierunku wykrywania okrętów i pojazdów podwodnych ASW (ang. Anti-Submarine Warfare). Główną zaletą takiego rozwiązania są niższe koszty operacyjne oraz większa efektywność czasowa prowadzonych działań. W przypadku klasycznych środków ZOP, takich jak śmigłowce Mi-14 czy jednostki nawodne (bojowe i rozpoznawcze), zaangażowanie zasobów jest znacznie większe – zarówno pod względem finansowym, jak i organizacyjnym. Ich użycie wymaga udziału licznego personelu oraz rozbudowanego zaplecza logistycznego. W przeciwieństwie do tego, BSP może być obsługiwany przez jedną osobę, a jego konstrukcja i eksploatacja są zdecydowanie tańsze.
W celu realizacji zadań ZOP, BSP może zostać wyposażony w specjalistyczne czujniki hydroakustyczne, sonarowe lub magnetometryczne, wspomagające wykrywanie i śledzenie obiektów nawodnych oraz podwodnych. Docelowo jednostka ma pełnić funkcję uniwersalnego systemu pomiarowo-rozpoznawczego. Dodatkowo możliwość integracji algorytmów przetwarzania sygnałów i analizy danych w czasie rzeczywistym znacząco zwiększa potencjał operacyjny systemu.
silnika
Rys. 16. Dane z żyroskopu przed wykonaniem kalibracji regulatorów silnika
Gyroscope
Jakub Tkaczyk, Maciej Tyszecki, Jacek Jabłoński, Paweł Piskur
Bibliografia
1. Telli K., Kraa O., Himeur Y., Ouamane A., Boumehraz M., Atalla S., Monsoor W., A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs), “Systems”, Vol. 11, No. 8, 2023, DOI: 10.3390/systems11080400.
2. Yang Z., Yu X., Dedman S., Rosso M., Zhu J., Yang J., Xia Y., Tian Y., Zhang G., Wang J., UAV remote sensing applications in marine monitoring: Knowledge visualization and review, “Science of The Total Environment”, Vol. 838, Part 1, 2022, DOI: 10.1016/j.scitotenv.2022.155939.
3. Sotoudehfar S., Sarkin J.J., Drones on the Frontline: Charting the Use of Drones in the Russo-Ukrainian Conflict and How Their Use May Be Violating International Humanitarian Law, “International and Comparative Law Review”, Vol. 23, No. 2, 2023, DOI: 10.2478/iclr-2023-0018.
4. Chávez K., Learning on the Fly: Drones in the Russian-Ukrainian War, “Arms Control Today”, Vol. 53, No. 1, 2023, 6–11.
5. Jeelani I., Gheisari M., Safety challenges of UAV integration in construction: Conceptual analysis and future research roadmap, “Safety science”, Vol. 144, 2021, DOI: 10.1016/j.ssci.2021.105473.
6. Feron E. (ed.) Advances in Control System Technology for Aerospace Applications, Springer, LNCIS, Vol. 460, 2016, DOI: 10.1007/978-3-662-47694-9.
7. Zhu H., Nie H., Zhang L., Wei X., Zhang M., Design and assessment of octocopter drones with improved aerodynamic efficiency and performance, “Aerospace Science and Technology”, Vol. 106, 2020, DOI: 10.1016/j.ast.2020.106206.
8. Bin H., Justice A., The design of an unmanned aerial vehicle based on the ArduPilot, “Indian Journal of Science and Technology”, Vol. 2, No. 4, 2009, 12–15, DOI: 10.17485/ijst/2009/v2i4/29423.
9. Chintanadilok J., Patel S., Zhuang Y., Singh A., Mission planner: An open-source alternative to commercial flight planning software for unmanned aerial systems, “Agricultural Education and Communication”, Vol. 2022, No. 4, 2022, DOI: 10.32473/edis-AE576-2022.
10. Yan H., Yang S.-H., Chen Y., Fahmy S.A., Optimum battery weight for maximizing available energy in UAV-enabled
11. Mu J., Zhang R., Cui Y., Gao N., Jing X., UAV meets integrated sensing and communication: Challenges and future directions, “IEEE Communications Magazine”, Vol. 61, No. 5, 2023, 62–67, DOI: 10.1109/MCOM.008.2200510.
12. Yaşa Y., An Efficient Brushless DC Motor Design for Unmanned Aerial Vehicles, “Avrupa Bilim ve Teknoloji Dergisi”, No. 35, 2022, 288–294, DOI: 10.31590/ejosat.1083838.
13. Andria G., Di Nisio A., Lanzolla A.M.L., Spadevecchia M., Pascazio G., Antonacci F., Design and performance evaluation of drone propellers, 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), IEEE, 2018, 407–412, DOI: 10.1109/MetroAeroSpace.2018.8453604.
14. Hassija V., Chamola V., Agrawal A., Goyal A., Luong N.C., Niyato D., Yu F.R., Guizani M., Fast, reliable, and secure drone communication: A comprehensive survey, “IEEE Communications Surveys & Tutorials”, Vol. 23, No. 4, 2021, 2802–2832, DOI: 10.1109/COMST.2021.3097916.
15. Bandini F., Olesen D.H., Jakobsen J., Kittel C.M.M., Wang S., Garcia M., Bauer-Gottwein P., Technical note: Bathymetry observations of inland water bodies using a tethered single-beam sonar controlled by an unmanned aerial vehicle, “Hydrology and Earth System Sciences”, Vol. 22, No. 8, 2018, 4165–4181, DOI: 10.5194/hess-22-4165-2018.
16. Hansen T., Belenis B., Firvida M.B., Creutz T., Birk A., Scanning Sonar Data from an Underwater Robot with Ground Truth Localization, “IEEE Access”, Vol. 12, 2024, 129202–129211, DOI: 10.1109/ACCESS.2024.3420766.
17. Metni N., Pflimlin J.-M., Hamel T., Souères P., Attitude and gyro bias estimation for a VTOL UAV, “Control Engineering Practice”, Vol. 14, No. 12, 2006, 1511–1520, DOI: 10.1016/j.conengprac.2006.02.015.
Design and Implementation of an Octocopter-type Unmanned Aerial Vehicle (UAV) for Underwater Environmental Data Acquisition Using the Ping 360 Sonar
Abstract: The article presents the design, construction and testing of an unmanned aerial vehicle (UAV) for marine applications. The UAV design includes specially developed floats, allowing it to float on the surface of the water. The UAV is designed to acquire data in the water’s depths using Ping360 sonar. It is controlled using a dedicated remote controller, or alternatively, can carry out autonomous missions according to a preprogrammed scenario. The sonar data is transmitted in real time to the operator at the ground station for ongoing analysis. The article discusses in detail the subsequent design and construction stages, including the frame and float design, the system architecture, and the electronic and hardware layers. The final section presents the results of the analysis of flight parameters, obtained both during tests over land and in sea conditions.
Absolwent Akademii Marynarki Wojennej na kierunku Automatyka i Robotyka na Wydziale Mechaniczno-Elektrycznym. Aktualnie kontynuuje studia magisterskie na tym samym kierunku. Ma doświadczenie w zakresie bezzałogowych systemów latających, jednak specjalizuje się w technologiach podwodnych. Ma także doświadczenie w projektowaniu, modelowaniu i programowaniu robotów oraz w przetwarzaniu sygnałów.
mgr inż. Jacek Jabłoński
JacekJab1972@gmail.com
ORCID: 0009-0000-3908-6858
inż. Maciej Tyszecki
mtyszecki@gmail.com
ORCID: 0009-0009-1333-4783
Absolwent Akademii Marynarki Wojennej na kierunku Automatyka i Robotyka na Wydziale Mechaniczno-Elektrycznym. Aktualnie kontynuuje studia magisterskie na tym samym kierunku. Ma doświadczenie w zakresie bezzałogowych systemów latających oraz w projektowaniu, modelowaniu i budowie nawodnych pojazdów bezzałogowych.
Absolwent Akademii Techniczno-Rolniczej w Bydgoszczy na Wydziale Elektroniki i Telekomunikacji (1997). W latach 1996–2003 odpowiedzialny za projekt i wdrożenie interfejsów nawigacyjnych dla samolotów SU-22M4 i MIG-29. Interfejsy te integrują systemy GPS (Trimble), TACAN (Rockwell Collins USA), VOR, DME oraz ILS (Marconi Selenia Italia). Od 2003 r. związany z firmą EYE-DRON.PL jako Project Manager, konstruktor oraz pilot-operator UAV. W latach 2017–2021 Kierownik Projektu Dron For Nature. Od 2021 r. Główny Specjalista ds. Dronów w JSW Nowe Projekty, uczestniczący w projektach: SOWA, ZOP-BSP oraz AutoInvent. Od 2024 r. wykładowca w Akademii Marynarki Wojennej.
kmdr por. dr hab. inż. Paweł Piskur p.piskur@amw.gdynia.pl ORCID: 0000-0002-8823-43164
Absolwent Wojskowej Akademii Technicznej w Warszawie, Wydział Mechatroniki, kierunek osprzęt samolotów i śmigłowców (2004 r.). Przez 13 lat służył w Bazie Lotnictwa Marynarki Wojennej. W 2010 r. na Politechnice Koszalińskiej uzyskał stopień doktora nauk technicznych w dziedzinie mechaniki i budowy maszyn. Od 2017 r. pracuje w Akademii Marynarki Wojennej. Jego obszar badawczy jest ściśle związany z podwodnymi pojazdami bezzałogowymi, a zwłaszcza biomimetycznymi układami napędowymi.
Jakub Tkaczyk, Maciej Tyszecki, Jacek Jabłoński, Paweł Piskur
Statystyczna ocena wydajności serwera symulatora
mieszanej rzeczywistości
Piotr Golański, Michał Golański
Instytut Techniczny Wojsk Lotniczych, ul. Ks. Bolesława 6, 01-494 Warszawa
Streszczenie: Mimo ciągłego wzrostu mocy obliczeniowych współczesnych komputerów, ich możliwości w wielu dziedzinach są niewystarczające. Przykładem może być symulacja procesów fizycznych, stosowana we wszelkiego rodzaju systemach szkoleniowych opartych na technologii wirtualnej lub mieszanej rzeczywistości. Wynika to z rosnących wymagań stawianych tym systemom na osiąganie coraz większych dokładności w odwzorowaniu rzeczywistości. Rozwiązaniem tego problemu jest wykorzystanie symulacji rozproszonej, która dzięki zastosowaniu rozwiązań chmurowych umożliwia zdalny dostęp do mocy obliczeniowych specjalizowanych serwerów, tym samym zapewnia zdalne prowadzenie szkolenia. Krytycznym zagadnieniem staje się zapewnienie efektywnej komunikacji zapewniającej wymianę danych między klientami a serwerem symulacji w czasie rzeczywistym. W artykule przedstawiono propozycję budowy serwera oraz protokołu komunikacji do zastosowania w chmurowej wersji symulatora śmigłowca Mi-17 opartego na technologii mieszanej rzeczywistości. Zaproponowano metodę pomiaru prędkości łącza opartego na tym protokole oraz dokonano statystycznego opisu uzyskanych wyników.
Od wielu lat technologia chmurowa znajduje zastosowanie w nauce, technice i przemyśle. Pozwala udostępniać zasoby komputerowe, takie jak serwery, pamięć masowa, bazy danych a także wyniki działania aplikacji zdalnym klientom [8]. Dzięki temu możliwe jest m.in. wyodrębnienie krytycznych algorytmów, np. z punktu widzenia ich poufności, umieszczenia ich na serwerze i udostępnianie jedynie wyników ich działania jako odpowiedzi na zapytania zdalnych klientów. Takie założenie zostało przyjęte przy budowie symulatora chmurowego statku powietrznego realizowanego w Instytucie Technicznym Wojsk Lotniczych (rys. 1).
Środowisko chmurowe dla symulatora ma stanowić hiperkonwergentna platforma Nutanix, uruchomiona w ramach Kra jowego Ośrodka Badawczego Inteligentnych Materiałów Kompozytowych osadzoną we własnej infrastrukturze Instytutu Technicznego Wojsk Lotniczych. Środowisko tworzą dwa główne elementy funkcjonalne: w warstwie sprzętowej – klaster Nutanix i sprzęt firmy Fujitsu, w warstwie programowej – pakiet obliczeniowy ANSYS.
Autor korespondujący:
Piotr Golański, piotr.golanski@itwl.pl
Artykuł recenzowany nadesłany 26.11.2024 r., przyjęty do druku 11.07.2025 r.
Rozproszona symulacja mieszanej rzeczywistości MR będzie odbywać się równocześnie na wielu stanowiskach klienckich MR Client i, z zainstalowanym oprogramowaniem symulacyjnym mieszanej rzeczywistości (będzie to symulator MR
Rys. 1. Schemat koncepcyjny wielostanowiskowej symulacji z uż yciem środowiska chmurowego Nutanix
Fig. 1. Concept scheme of multi-station simulation using the Nutanix cloud environment
śmigłowca Mi-17 [7]), wyposażonych w rzeczywiste organy sterowania, na których będą zaimplementowane graficzne modele ich cyfrowych bliźniaków oraz wirtualne modele graficzne obiektów technicznych wraz z otoczeniem. Stanowiska klienckie MR Client i będą stanowić węzły symulacji 3D. Dla każdego stanowiska po zalogowaniu się w sieci rozległej do chmury Nutanix, będzie przydzielana maszyna wirtualna Unity Motion Model i, z modelem matematycznym ruchu obiektu, stanowiąc lokalny węzły symulacji. Komunikacja między wszystkimi węzłami symulacyjnymi będzie się odbywać z wykorzystaniem Serwera Unity. Krytycznym zagadnieniem będzie tu zagwarantowanie efektywnej komunikacji umożliwiającej wymianę danych między zdalnymi stanowiskami symulatora a serwerem w czasie rzeczywistym. Czasy odpowiedzi serwera nie stanowią większego problemu, jeśli obiekty generowane na różnych węzłach MR Client i są od siebie o ddalone w symulowanej przestrzeni. Problem pojawia się, gdy symulowane obiekty znajdują się w bliskiej odległości, np. pierwszy i drugi pilot w kabinie lecącego śmigłowca. W takich sytuacjach bardzo ważne jest zapewnienie krótkich czasów odpowiedzi serwera.
2. Sformułowanie problemu
W celu przeprowadzenia badań wydajnościowych serwera, zbudowano w warunkach laboratoryjnej sieci lokalnej zestaw dwóch stanowisk symulacyjnych. Na jednym stanowisku symulowany był ruch uproszczonej platformy z obiektem 3D, symulującym pierwszego pilota, na drugim symulowano model 3D drugiego pilota, który we wspólnej przestrzeni znajdował się na tej samej ruchomej platformie. Komunikacja między stanowiskami odbywała się z wykorzystaniem oprogramowania Unity Server VM. Oprogramowanie zaimplementowano w oparciu o technologię kontenerową, wykorzystując platformę Docker. Kontenery pobrano z rejestru dockerhub [18] jako dwa obrazy Redis (baza danych) i Alpine Linux (Serwer Unity). Na bazie Alpine zainstalowano właściwy serwer Unity Server. W protokole komunikacyjnym zastosowano mechanizmy WebSocket [11] oraz serializację JSON [16]. Ta architektura w dalszej części artykułu oznaczono jako A1 (rys. 2).
W trakcie badań, z użyciem tak zaimplementowanego serwera, zaobserwowano utratę pakietów i niesatysfakcjonującą wydajność. Dlatego zdecydowano zoptymalizować jego budowę, tak aby wyeliminować powyższe wady. Przede wszystkim uproszczono serwer przez zaimplementowanie bazy danych wewnątrz serwera jako zasobu pamięci z synchronizowanym dostępem. Zmieniono serializację JSON na MsgPack [17] z opcją serializacji bazującej na tablicach (ang. array-based serialization [20]). W dalszej części pracy tę architekturę oznaczono jako A2. Przeprowadzono następnie pomiary porównawcze czasów opóźnień dla obydwu serwerów.
Badania obydwu architektur przeprowadzono na zestawie składającym się z jednego komputera z systemem Linux Ubuntu w wersji 22.04 i uruchomionym na nim oprogramowaniem badanego serwera w dwóch wersjach oraz z sześciu stanowisk Klient Unity z systemem Windows 10/11 i oprogramowaniem symulacyjnym (rys. 3). Oprogramowanie na każdym stanowisku zawierało scenę Unity ze wszystkimi symulowanymi obiektami 3D, przy czym symulacja ruchu każdego z nich odbywała się na innym stanowisku. Synchronizacja danych odbywała się z częstotliwością odświeżania obrazu Unity (60 fps), przez wysłanie żądań klientów do serwera z podaniem wektora pozycji i rotacji. W odpowiedzi na żądanie serwer wysyłał do klientów wektory pozycji i rotacji obiektów symulowanych na pozostałych klientach. Interfejs na stanowiskach Klient Unity pozwalał jedynie na obserwację sceny.
Rys. 3. Układ do pomiaru czasów odpowiedzi serwera
Fig. 3. System for measuring server response times
Do pomiaru czasów opóźnień zastosowano oprogramowanie WireShark zainstalowane na jednym z klientów, określonym jako Klient Unity – pomiarowy. Pomiary polegały na przechwytywaniu pakietów przez aplikację WireShark w trakcie pracy klientów. Po zebraniu danych (w prezentowanej pracy były to dane obejmujące czas około 1 minuty), proces akwizycji był zatrzymywany, a wyniki eksportowane i zapisywane w plikach z rozszerzeniem pcapng. W celu uzyskania czasów opóźnień z danych zawartych w plikach pcapng, został opracowany skrypt w języku Python, który generował pliki tekstowe z zarejestrowanymi czasami opóźnień.
3. Analiza statystyczna czasów odpowiedzi serwerów
3.1. Przegląd metod
Do analizy zebranych danych pomiarowych, które są związane z czasowym aspektem zachowania się systemów, stosuje się techniki zdominowane przez deterministyczną analizę czasu odpowiedzi RTA (ang. Response-Time Analysis) [13], które opierają się na restrykcyjnych założeniach dotyczących zachowania sys-
Rys. 2. Diagram architektury A1
Fig. 2. The A1 architecture diagram
temu i zwracają wartość bezwzględną czasu reakcji dla najgorszego przypadku WCRT (ang. Worst-Case Response Time). Bardzo często te wartości są zbyt duże w porównaniu z rzeczywistymi wynikami.
W celu usunięcia tych wad, dla systemów, których nie da się poprawnie przeanalizować za pomocą deterministycznego RTA, proponowane jest podejście statystyczne oparte na teorii wartości ekstremalnych EVT (ang. Extreme Value Theory), która rozszerza centralne twierdzenie graniczne na ogony rozkładu i jest stosowana do modelowania zdarzeń rzadkich [9]. W pracy do analizy statystycznej wykorzystano rozkład uogólnionych wartości maksymalnych GEV (ang. Generalized Extreme Value), który łączy trzy rozkłady: Gumbela, Frecheta i Weibula. Ponadto zastosowano metodę estymacji parametrów statystycznych czasów opóźnień [12], składającą się z trzech kroków: 1. wstępna identyfikacja rozkładów kandydujących, 2. estymacja parametrów rozkładu, 3. weryfikacji jako ocena dobroci i dopasowania. Do wstępnej identyfikacji wybrano rozkłady badane w pracy [15]. Tak więc do dalszych rozważań przyjęto następujące rozkłady: normalny, logarytmiczno-normalny, Pareto, uogólniony rozkład wartości maksymalnych GEV (oryginalnie w pracy [15] GEV jest zastąpiony rozkładem Weibula).
Estymację parametrów wybranych rozkładów przeprowadzono metodą największej wiarygodności MLE (ang. Maximum Likelihood Estimation), w której stosuje się funkcję wiarygodności, określoną dla rozpatrywanego w pracy przypadku w postaci: 1 ()(|) n i i Lftθθ = = ∑ (1)
gdzie: ti – i-ty z n zaobserwowanych czasów odpowiedzi; (|) f θ – gęstość prawdopodobieństwa dla sparametryzowanego rozkładu.
Następnie poszukiwane są wartości parametrów 12 [] m θθθθ = w taki sposób, aby zmaksymalizować prawdopodobieństwo wygenerowania obserwacji dla oszacowanych parametrów [14]. Poszukiwane parametry są rozwiązaniem układu równań [6]: log 0 i L θ ∂ = ∂ (2)
W praktycznych rozwiązaniach stosowane są dedykowane narzędzia, np. fitdistrplus [5] albo bardziej uniwersalne środowiska obliczeniowe, jak Statistica lub MATLAB, który został użyty w niniejszej pracy.
Do oceny zgodności dopasowania zastosowano test Kołmogorowa-Smirnowa, podobnie jak zaproponowano w [4]. W tym teście miarą zgodności jest statystyka [6]:
sup(|)()nn x DFSt θ −∞≤≤+∞ =⋅− (3)
gdzie: (|) F θ – dystrybuanta dla rozkładu o parametrach wyznaczonych z równania (2); S n(t) – dystrybuanta empiryczna w próbie prostej z n elementów.
W teście przyjmuje się, że hipoteza o zgodności rozkładu empirycznego i teoretycznego będzie odrzucona na poziomie istotności ,α jeśli spełnione będzie:
() n PDD α α >= (4)
gdzie: D α – wartość krytyczna dla danego poziomu istotności.
Prawdopodobieństwo P, zwane dalej wartością p, określa istotność statystyczną, zwiększającą rygor wniosków wysnutych z danych [2].
3.2. Wyniki
Na wstępie analizy czasów odpowiedzi obydwu serwerów należy zaznaczyć, że już samo zastąpienie serializacji JSON przez opartą na tablicach serializacją MsgPack, spowodowało zmniejszenie obciążenia sieci, przez zmniejszenie wielkości przesyłanych pakietów. W tabeli 1 zestawiono wartości charakteryzujące rozmiary parametrów dla obydwu rodzajów architektury.
Tab. 1. Parametry rozkładów rozmiaru pakietów w bajtach Tab. 1. Distribution parameters for packet sizes in bytes
DominantaMedianaŚrednia
A1 98 814 675
A2 182 182 194
Z danych zamieszczonych w tabeli wynika, że rozkłady wielkości pakietów są lewoskośne – z bardzo dużym rozrzutem wartości ich parametrów statystycznych dla architektury A1. Dla zwiększenia czytelności i porównania czasów odpowiedzi przeprowadzono estymację wartości średnich czasu odpowiedzi stosując ruchome okno uśredniające obejmujące 100 próbek. W wyniku uzyskano następujące dwa przebiegi oznaczone jako Serwer A1 i Serwer A2. Na rys. 5 przedstawiono uzyskane wyniki czasów odpowiedzi.
Rys. 5. Histogram czasu odpowiedzi dla obu rodzajów architektury Fig. 5. Histogram of response times for both architectures
Pobieżna analiza pozwala stwierdzić, że czasy odpowiedzi w przypadku serwera A2 są o rząd wielkości mniejsze niż w przypadku serwera A1. Dla przedstawionych danych przeprowadzono nieparametryczne testy trendu (ang. Reverse Arrangement Test) [1], które potwierdziły stacjonarność pierwszego rzędu.
Na kolejnym rysunku przedstawiono histogramy dla obydwu czasów odpowiedzi. W przypadku serwera A1 można zaobserwować dwie wartości modalne dla czasów 0,75 ms i 2,17 ms, natomiast dla drugiego serwera są to wartości 0,32 ms, 0,39 ms i grzebieniowy odcinek dla czasów 0,42 ms, 0,44 ms i 0,46 ms. W wyniku przeprowadzonego dopasowania rozkładów uzyskano wyniki, które przedstawiono w postaci zestawienia dystrybuanty empirycznej z rozkładami teoretycznymi, uzyskanymi metodą największej wiarygodności.
Z analizy wykresów (rys. 7) widać, że dla serwera A1 występują duże różnice dopasowania dla rozkładu normalnego, nato-
Rys. 6. Histogram czasów odpowiedzi dla serwera A1 (z lewej) i A2 (z prawej)
Fig. 6. Histogram of response times for server A1 (left) and A2 (right)
Rys. 7. Dystrybuanty empiryczne i teoretyczne czasów odpowiedzi dla serwera A1 (z lewej) i A 2 (z prawej)
Fig. 7. Empirical and theoretical distributions of response times for server A1 (left) and A2 (right)
miast dla serwera A2 występuje bardzo duże niedopasowanie dla rozkładu Pareto. Mimo lepszego dopasowania pozostałych rozkładów, żaden z nich nie przeszedł testów zgodności Kołmogorowa-Smirnowa. Dokładniejsza analiza wykazała, że zmienność wartości średniej czasów odpowiedzi w trakcie pomiaru zmieniała się na tyle, że dla poprawnego dopasowania należało estymować rozkłady w krótszych przedziałach, podobnie jak dla procesów lokalnie stacjonarnych [3]. W związku z powyższym dla otrzymanych wyników zbudowano sześć rozłącznych przedziałów o liczności n = 150 próbek. Dla każdego przedziału wyznaczono rozkłady prawdopodobieństwa dla rozkładu: normalnego, logarytmiczno-normalnego, Pareto i GEV metodą największej wiarygodności. Na rys. 8 przedstawiono wyniki oceny dopasowania uzyskanych rozkładów teoretycznych do rozkładów empirycznych czasów odpowiedzi serwerów przeprowadzone testem Kołmogorowa-Smirnowa, dla każdej z serii próbek. Wysokość słupka jest wartością p (4).
Cechą wspólną obydwu wykresów jest niejednoznaczność dopasowań i zmienność ich stopnia dopasowania mierzoną wartością p. Wynika to z dynamiki i złożoności procesów występujących w badanym zjawisku, co potwierdzają badania [15]. Ponadto na obydwu wykresach widać brak dopasowania do rozkładu Pareto. W przypadku serwera A2 pojawia się dopasowanie do rozkładu normalnego. Można przypuszczać, że szybsze procesy synchronizowanego dostępu do pamięci wbudowanej bazy danych będą się charakteryzować rozkładem normalnym. Widoczna różnica między wykresami to skala osi rzędnych. Widać, że dla serwera A2 są uzyskiwane lepsze dopasowanie rozkładów niż dla serwera A1. Lepsze dopasowania rozkładów dla serwera A2 wynikają prawdopodobnie z jego prostszej
budowy, czyli braku zewnętrznej bazy danych, a tym samym braku procesów sieciowej komunikacji z nią. Rozkład czasu odpowiedzi serwera będzie zatem złożeniem mniejszej liczby rozkładów procesów działających współbieżnie w czasie pracy serwera.
Jeśli chodzi o parametry dopasowywanych rozkładów, to zostały zestawione w dwóch kolejnych tabelach. W tabeli 1 można zauważyć, że dla rozkładu GEV w Serii 2, gdzie mamy wysoki poziom istotności dopasowania, wartość średnia µ wynosi 2,17, co odpowiada wartości modalnej z histogramu dla serwera A1. Wartości średnie dla rozkładu log-normalnego mieszczą się w zakresie 2,30–3,02 ms i trudno dla nich znaleźć wartość modalną na histogramie.
Z tab. 2 wynika, że nie został zidentyfikowany rozkład dla wartości modalnej 0,75. W związku z tym przeprowadzono próbę dopasowania rozkładu dla zawężonego zakresu wartości czasów odpowiedzi 0,5–1,1 ze wszystkich próbek. Dla tego przypadku test zgodności wypadł pozytywnie jedynie dla rozkładu GEV uzyskując wartość p = 0,0954 z parametrami: ξ = –0,0850, µ = 0,7723, σ = 0,0927. Uzyskana wartość średnia µ w dobrym przybliżeniu odpowiada identyfikowanej wartości modalnej. Obecność tak krótkich czasów wynika ze stosowanego w WebSocket mechanizmu wzajemnego odpytywanie między klientem a serwerem, polegającym na wysyłaniu bardzo krótkich komunikatów, na które druga strona musi jak najszybciej odpowiedzieć [19]. O obecności tych komunikatów może świadczyć wartość dominanty rozkładu rozmiaru pakietów z tab. 1. Inną przyczyną może być fragmentacja komunikatów, ale ze względu na bardzo małe rozmiary przesyłanych pakietów, zjawisko to nie powinno występować.
Rys. 8. Istotność statystyczna dopasowania rozkładów prawdopodobieństwa dla czasów opóźnień dla serwera A1 (z lewej) i serwera A2 (z prawej)
Fig. 8. Statistical significance of matching probability distributions for delay times for server A1 (left) and server A2 (right)
Tab. 2. Parametry rozkładów dla czasów odpowiedzi serwera A1
Tab. 2. Distribution parameters for A1 server response times
1 2,30101,94380,26041,85271,1426
2 2,65741,84980,22032,17361,2374
3 3,02651,91520,06732,62141,5965
4 2,97722,01900,24202,41881,5711
5 2,42932,12890,29791,93221,3591
6 2,80801,92430,04492,45351,5041
Tab. 3. Parametry rozkładów dla czasów odpowiedzi serwera A2
Tab. 3. Distribution parameters for A2 server response times Seria
W przypadku parametrów statystycznych dla serwera A2 wszystkie rozkłady mają wartości średnie µ, które mieszczą się w bardzo bliskim zakresie od 0,37–0,43 i przedziałowo odpowiadają jego wartościom modalnym dla przedziału 0,32–0,46 (rys. 6). Niestety ich jednoznaczne przyporządkowanie jest niemożliwe. Współczynnik kształtu ξ dla rozkładu GEV jest praktycznie zbliżony i dla obydwu serwerów oscyluje wokół zera. Można zatem przyjąć przybliżenie, że dla obydwu serwerów jest on typu I, czyli jest rozkładem Gumbela.
4. Wnioski
W artykule przedstawiono propozycję optymalizacji serwera chmurowego dla sieciowych stanowisk symulatorów mieszanej rzeczywistości. Badania serwera przeprowadzono w laboratoryjnych warunkach sieci lokalnej. Na początkowym etapie prac serwer wykorzystywał bazę danych Redis oraz mechanizmy komunikacji WebSocket z protokołem JSON. W trakcie badań z wykorzystaniem architektury A1, zaobserwowano utratę
pakietów i niesatysfakcjonującą wydajność. W celu usunięcia tych wad zastosowano uproszczoną architekturę A2, w której wykorzystano protokół komunikacji z opartą na tablicach serializacją MsgPack. Optymalizację architektury osiągnięto poprzez wbudowanie bazy danych do serwera. Po wykonaniu pomiarów czasów odpowiedzi uzyskano wyniki potwierdzające zmniejszenie czasu odpowiedzi dla serwera A2, w stosunku do czasu odpowiedzi dla serwera A1 o rząd wielkości. Do oceny statystycznej czasów odpowiedzi, przeprowadzono identyfikację rozkładów prawdopodobieństwa i estymację ich parametrów wraz z oszacowaniem poziomu dopasowania. Do tego celu wykorzystano metodę największej wiarygodności oraz testy zgodności Kołmogorowa-Smirowa.
Dla obydwu serwerów uzyskano dopasowanie rozkładów czasów ich odpowiedzi do rozkładu Log-normalnego i Uogólnionego Wartości Maksymalnych (GEV). Dodatkowo dla serwera A2 uzyskano dopasowanie dla rozkładu normalnego. Podjęto próbę przybliżonej identyfikacji wartości modalnych histogramów. Niestety ich jednoznaczna identyfikacja w wielu przypadkach okazała się niemożliwa.
Bardzo duży wpływ na osiągane czasy odpowiedzi dla Serwera A1 miał miało niewątpliwie zastąpienie tekstowej serializacji JSON przez opartą na tablicach serializację MsgPack, o czym świadczą parametry statystyczne rozmiarów pakietów przedstawione w tab. 1.
Należy mieć na uwadze, że zaprezentowane podejście jest podejściem uproszczonym. Czas odpowiedzi systemów webowych zależy od obciążenia systemu oraz jego parametrów. Obciążenie może mieć wiele składowych reprezentujących miary obciążenia poszczególnych elementów systemu, zasobów [15] (np. bazy danych Redis w architekturze A1).
W celu dokładniejszej analizy statystycznej należałoby zidentyfikować elementy systemu i wykonać pomiary, w których pracowałyby jedynie wybrane elementy systemu, tak aby wyznaczyć statystyczny charakter ich wpływu na czas odpowiedzi. Interesującym wydaje się też zastosowanie w estymacji czasów odpowiedzi, modeli predykcji rozmytych szeregów czasowych [10].
Bibliografia
1. Bendat J.S., Piersol A.G., Random Data – Analysis and Measurement Procedures, Fourth Edition, John Wiley & Sons, Inc., Hoboken, New Jersey 2010.
2. Benjamini Y., De Veaux R.D., Efron B., Evans S., Glickman M., Graubard B.I., Kafadar K., ASA President’s Task Force Statement on Statistical Significance and Replicability, “CHANCE”, Vol. 34, No. 4, 2021, 10–11, DOI: 10.1080/09332480.2021.2003631.
3. Chojnacki D., Parametryczna estymacja widma lokalnie stacjonarnych procesów losowych, Rozprawa doktorska, Politechnika Gdańska, Gdańsk 2019.
4. Chakravarti I.M., Laha R.G., Roy J., Handbook of Methods of Applied Statistics, Vol. I, John Wiley and Sons, 1967.
5. Deliggnette-Muller M.L., Dutang Ch., fitdistrplus: An R Package for Fitting Distributions, “Journal of Statistical Software”, Vol. 64, No. 4, 2015, DOI: 10.18637/jss.v064.i04.
6. Fisz W., Rachunek prawdopodobieństwa i statystyka matematyczna, wyd. IV, PWN, Warszawa 1969.
7. Golański P., Szczekala M., Roguszewski M., Analysis of the 3D Object Reconstruction Accuracy in an Mi-17 Mixed Reality Simulator, Automation 2021: Recent Achievements in Automation, Robotics and Measurement Technique, Vol. 1390, 2021, 136–145, DOI: 10.1007/978-3-030-74893-7_14.
8. Koszela J., Szymczyk M., Rozproszona symulacja wirtualna – Chmura Symulacyjna, „Symulacja w Badaniach i Rozwoju”, Vol. 9, No. 1-2, 2018, 33–46.
9. Lu Y., Nolte T., Bate I., Cucu-Grosjean L., A statistical Response-Time Analysis of Real-Time Embedded Systems, 2012 IEEE 33rd Real-Time Systems Symposium, DOI: 10.1109/RTSS.2012.85.
10. Lucas P., Orang O., Silva P.C.L., Mendes E.M.A.M., Guimarães F., A Tutorial on Fuzzy Time Series Forecasting Models: Recent Advances and Challenges, “Learning and Nonlinear Models”, Vol. 19, No. 2, 2022, 29−50, DOI: 10.21528/lnlm-vol19-no2-art3.
11. Łasocha W.P., Badurowicz M., Porównanie wydajności protokołu WebSocket i HTTP, „Journal of Computer Sciences Institute”, Vol. 19, 2021, 67−74.
12. Ramakrishnan R., Kaur A., Performance evaluation of web service response time probability distribution models for business process cycle time simulation, “Journal of Systems and Software”, Vol. 161, 2020, DOI: 10.1016/j.jss.2019.110480.
13. Son S.H., Lee I., Leung J.Y.-T., Handbook of Real-Time and Embedded Systems, Chapman and Hall/CRC, 2007.
15. Zatwarnicki K., Systemy webowe z jakością usług uwzględniające kryterium czasowe, Problemy Projektowania, Politechnika Opolska ISSN 1429-6063, Opole 2012.
Statistical Assesment of Mixed-Reality Simulator Server Performance
Abstract: Despite the continuous increase in the computing power of modern computers, their capabilities are still insufficient in many areas. An example is the simulation of physical processes taking place in all types of training systems based on Virtual or Mixed-Reality technology. This is due to the growing requirements placed on these systems to achieve greater accuracy in reproducing reality. The solution to the above problem is the use of distributed simulation, which – by utilizing cloud solutions – allows for remote access to the computing power of specialized servers, and thus also provides the option of conducting remote training. In such a case, ensuring effective communication between the simulator’s client stations and the server in real time is of utmost importance. This article presents a proposal for a server-client communication protocol, for use in the cloud version of the Mi-17 helicopter, Mixed-Reality simulator. A method for evaluating the performance of this protocol was proposed, along with a statistical description of the obtained results.
Keywords: cloud server, distributed simulation, mixed reality, fitting distributions, goodness of fit
dr inż. Piotr Golański piotr.golanski@itwl.pl
ORCID: 0000-0002-3286-8678
Adiunkt w Zakładzie Integracji Systemów C4ISR Instytutu Technicznego Wojsk Lotniczych. Zajmuje się zagadnieniami związanymi z modelowaniem i symulacją procesów w systemach szkoleniowych.
Michał Golański michal.golanski@itwl.pl
ORCID: 0009-0009-4836-3197
Student na Wydziale Mechatroniki, Uzbrojenia i Lotnictwa Wojskowej Akademii Technicznej. W Instytucie Techniczn ym Wojsk Lotniczych zajmuje się administracją systemów Linux, serwerami WWW oraz tworzeniem symulacji 3D.
Piotr
Zastosowanie kamer termowizyjnych do detekcji i śledzenia znaczników wizualnych w warunkach ograniczonej widzialności metodami sztucznej
inteligencji
Marcin Leplawy, Piotr Lipiński, Barbara Morawska, Jakub Zdanowicz-Zasidko Politechnika Łódzka, Instytut Informatyki, al. Politechniki 8, 93-590 Łódź, Polska
Streszczenie: W artykule przedstawiono system wykrywania znaczników ArUco w obrazach termowizyjnych IR, zaprojektowany z myślą o pokonaniu ograniczeń typowych dla tego typu obrazowania, takich jak niska rozdzielczość, szum termiczny, pasmowanie gradientu i brak wyraźnych krawędzi. Klasyczne algorytmy wykrywania znaczników fiducjalnych, skuteczne w obrazach RGB, zawodzą w środowisku IR z uwagi na specyfikę promieniowania cieplnego. Autorzy zaprojektowali wieloetapowy potok przetwarzania wstępnego obrazu, obejmujący m.in. posteryzację, wygładzanie gradientu, wzmocnienie krawędzi i eliminację pasmowania, co umożliwia poprawną identyfikację wzorców binarnych ArUco. Zastosowano również metody estymacji pozy i orientacji w przestrzeni 3D oraz adaptacyjne progowanie binarne z tolerancją błędów dopasowaną do zakłóceń termicznych. Opracowany interaktywny system pozwala użytkownikowi dostosowywać parametry przetwarzania obrazu w czasie rzeczywistym, co znacząco zwiększa skuteczność detekcji znaczników ArUco w zmiennych warunkach środowiskowych. Przeprowadzone testy wykazały poprawę skuteczności detekcji znaczników o około 26 % w porównaniu do standardowych podejść.
Słowa kluczowe: kamery termowizyjne, znaczniki ArUco, detekcja w podczerwieni, przetwarzanie obrazu, sztuczna inteligencja, widzialność ograniczona, nawigacja autonomiczna, systemy wizyjne, znaczniki fiducjalne
1. Wprowadzenie
W artykule przedstawiono zastosowanie kamer termowizyjnych do detekcji i śledzenia znaczników wizualnych ArUco [1] w warunkach ograniczonej widzialności z wykorzystaniem metod sztucznej inteligencji [4]. Opracowana metoda została przystosowana do pracy w środowiskach, gdzie zawodzą klasyczne techniki przetwarzania obrazów RGB, a kluczowe staje się pozyskanie informacji z zakresu promieniowania podczerwonego. Rozwiązanie powstało w ramach prac nad nowym systemem wspomagania nawigacji oraz lokalizacji przestrzennej obiektów poruszających się w trudnych warunkach atmosferycz-
Autor korespondujący:
Marcin Leplawy, marcin.leplawy@p.lodz.pl
Artykuł recenzowany nadesłany 08.07.2025 r., przyjęty do druku 18.08.2025 r.
Zezwala się na korzystanie z artykułu na warunkach licencji Creative Commons Uznanie autorstwa 4.0 Int.
nych, takich jak mgła, dym, zadymienie pożarowe czy zaciemnienie całkowite.
Współczesne pojazdy autonomiczne, czyli jednostki zdolne do samodzielnego poruszania się bez udziału operatora dzięki wykorzystaniu zaawansowanych systemów sterowania i percepcji oraz systemy inspekcyjne, coraz częściej wyposażane są w zaawansowane czujniki wizyjne, które umożliwiają pozyskiwanie danych środowiskowych w czasie rzeczywistym. Kamery światła widzialnego, choć szeroko stosowane, mają istotne ograniczenia w warunkach pogorszonej widoczności. W takich sytuacjach kluczową rolę odgrywa obrazowanie termiczne, które umożliwia rejestrację promieniowania cieplnego emitowanego przez obiekty. Integracja kamer termowizyjnych z algorytmami wykrywania znaczników fiducjalnych, takich jak ArUco [2], wymaga jednak zastosowania dedykowanych metod przetwarzania ze względu na odmienną charakterystykę sygnału termograficznego.
W artykule opisano zaprojektowany potok przetwarzania obrazów termowizyjnych, obejmujący etapy wstępnej filtracji, segmentacji cieplnej, morfologii obrazu oraz detekcji znaczników. System wykorzystuje także elementy uczenia maszynowego do poprawy stabilności śledzenia [3] w obecności szumu termicznego, pasmowania gradientu oraz zmiennej emisyjno-
ści powierzchni. Proponowane podejście znajduje zastosowanie w systemach wspomagania orientacji przestrzennej dla bezzałogowych statków powietrznych (BSP), robotów ratowniczych oraz autonomicznych pojazdów naziemnych pracujących w środowiskach zamkniętych lub nieprzewidywalnych.
W ramach badań opracowano również zestaw testowy umożliwiający rejestrację sekwencji obrazów z kamery termowizyjnej podczas kontrolowanego ruchu znacznika. Pozwoliło to na przeprowadzenie analizy skuteczności śledzenia w różnych scenariuszach operacyjnych. W artykule zaprezentowano wyniki eksperymentów oraz ocenę jakości detekcji w zależności od rozdzielczości kamery, temperatury tła oraz charakterystyki ruchu. Opracowana metoda może stanowić uzupełnienie klasycznych systemów inercyjnych i wizyjnych, zwiększając niezawodność działania systemów nawigacyjnych w warunkach krytycznych.
2. Zastosowanie ArUco
Znaczniki ArUco należą do rodziny kwadratowych znaczników fiducjalnych, które są powszechnie stosowane w zadaniach lokalizacji i śledzenia pozycji kamery, w szczególności w aplikacjach rzeczywistości rozszerzonej AR (ang. Augmented Reality), robotyce mobilnej, autonomicznej nawigacji oraz systemach pomiarowych. Ich nazwa pochodzi od hiszpańskiej grupy badawczej z Uniwersytetu w Kordobie, która opracowała ten system i opublikowała jego podstawy w 2014 r. Typowy znacznik ArUco (rys. 1) składa się z: czarnej ramki zewnętrznej, która ułatwia wykrywanie konturów i pozwala na jednoznaczne wyodrębnienie prostokąta, binarnie zako dowanego wnętrza (siatka np. 4 × 4 lub 5 × 5), reprezentującego identyfikator znacznika (ID), obszaru białego marginesu, oddziela jącego wnętrze od otoczenia.
Rys. 1. Przykład czterech różnych kodów ArUco
Fig. 1. Example of four different ArUco codes
Dzięki znajomości geometrii znacznika (cztery narożniki w znanej konfiguracji) możliwe jest wyznaczenie pozycji i orientacji kamery względem znacznika w przestrzeni trójwymiarowej. Warunkiem jest jedynie wcześniejsza kalibracja kamery, pozwalająca określić parametry wewnętrzne (macierz kamery, dystorsje).
Detekcja i dekodowanie
Słowniki ArUco są tworzone w taki sposób, aby maksymalizować odległość między znacznikową, tj. minimalną liczbę
różniących się bitów między dowolnymi dwoma markerami w słowniku, co znacząco zmniejsza ryzyko błędnej identyfikacji. Możliwe jest też dodawanie bitów kontrolnych pozwalających na korekcję błędów, np. przy częściowym zasłonięciu znacznika lub w obecności zakłóceń (np. szumu).
Zalety i przewagi nad innymi systemami
Standardowe znaczniki ArUco zostały zaprojektowane z myślą o detekcji w obrazach RGB, gdzie wysoki kontrast między czarnym obramowaniem a jasnym tłem pozwala na jednoznaczną identyfikację wzorców binarnych. Jednak w warunkach ograniczonej widzialności – takich jak ciemność, mgła, zadymienie czy silne zakłócenia świetlne – kamery RGB zawodzą. Alternatywą w takich scenariuszach są kamery termowizyjne [5], które rejestrują emisję promieniowania cieplnego zamiast światła widzialnego.
Problemy z klasyczną detekcją ArUco w obrazach IR Bezpośrednie zastosowanie algorytmów wykrywających znaczniki ArUco na obrazach termowizyjnych jest nieefektywne ze względu na: niski kontrast cieplny między markerem a tłem (temperatury mogą być zbliżone), brak wyraźnych granic geometrycznych (ciepło „rozlewa się” przez materiał), pasmowanie gradientu (ang. banding), które tworzy fałszywe krawędzie, szum termiczny, szczególnie w niechłodzonych kamerach niskiej klasy, niską rozdzielczość przestrzenną i tonalną (często tylko 8 bitów głębi), refleksy cieplne i nieprzewidywalna emisyjność materiałów.
W efekcie, klasyczne binarne metody progowania obrazu i detekcji konturów zawodzą – marker nie zostaje wykryty lub zostaje błędnie sklasyfikowany.
3. Adaptacja systemu ArUco do obrazowania IR
Aby umożliwić skuteczną detekcję znaczników ArUco [7] w środowisku IR, konieczne jest zastosowanie specjalistycznych rozwiązań zarówno na poziomie sprzętowym, jak i algorytmicznym. Aby dopasować system ArUco do tego szczególnego problemu, niezwykle istotne jest zrozumienie najważniejszych różnic w powszechnie używanej technologii obrazowania IR w stosunku do aparatów pasma światła widzialnego. Ze względu na niższą skalę produkcji oraz wyspecjalizowany zakres zastosowań, sensory kamer podczerwonych są zazwyczaj znacznie droższe od swoich odpowiedników stosowanych w kamerach światła widzialnego.
Kamery termowizyjne, powszechnie dostępne na rynku, cechują się niższą rozdzielczością oraz mniejszą odpornością na zakłócenia pochodzące z otoczenia w porównaniu do kamer światła widzialnego tej samej klasy cenowej. Dodatkowo ich sensory są bardziej wrażliwe na zmiany temperatury powierzchni matrycy wynikające z pracy urządzenia, co ma istotne znaczenie podczas rejestracji obrazów termowizyjnych. W efekcie, uzyskiwane obrazy są zazwyczaj mniej dokładne niż te generowane przez kamery RGB.
Jednym ze sposobów poprawienia jakości danych, na których jest przeprowadzane rozpoznawanie znaczników jest ich fizyczna adaptacja. Markery wycinane są z materiałów o znanych właściwościach termicznych (np. akryl), gdzie wzór ArUco stanowi układ różnie przewodzących lub przepuszczających promieniowanie cieplne powierzchni. Przykładowo: miejsca „czarne”
Marcin Leplawy, Piotr Lipiński, Barbara Morawska, Jakub Zdanowicz-Zasidko
mogą być wycięte w materiale i przepuszczać ciepło, a reszta blokować emisję.
Technika ta została opisana m.in. w artykule przygotowanym przez naukowców Laboratorium Robotów Autonomicznych [2] pracujących w Uniwersytecie Nevady. Opracowany przez nich system wykorzystuje znaczniki AR jako jeden z kilku elementów systemu SLAM, który opiera się głównie na systemach inercyjnych i działa równolegle (aczkolwiek niezależnie) do komercyjnego rozwiązania ROVIO.
Rozwiązanie to jednak, jak sami badacze podkreślają, wymaga bardzo dokładnie wytworzonych znaczników, o ostrych krawędziach, zachowujących brak jakichkolwiek zniekształceń powierzchni (tzw. warping) lub uszkodzeń. Technologia, która jest opisana w artykule, bazuje na współpracy dodatkowych systemów poza analizą termowizyjną, a więc uzależnia skuteczność rozpoznawania markerów i analizy ich pozy od dodatkowych źródeł danych, które mogą nie być dostępne. Przykładowo system inercjalny wykorzystujący magnetyzm lub grawitację, nie będzie w stanie pełnić roli korygującej w trakcie oddziaływania zewnętrznego pola magnetycznego lub pod wodą. Aby umożliwić wykorzystanie istniejących algorytmów rozpoznawania kodów ArUco, nasz zespół badawczy proponuje wykorzystanie zaawansowanego przetwarzania obrazu razem z opcjonalną modyfikacją samych znaczników.
Zanim obraz trafi do klasyfikatora ArUco, stosuje się specjalny potok filtrujący: posteryzacja (redukcja liczby poziomów szarości), wygładzanie gradientów cieplnych, filtracja szumu, adaptacyjne progowanie i normalizacja histogramu, rozpoznawanie krawędzi, aproksymujące je w sposób iteracyjny, korekcja błędów i estymacja pozycji.
Detekcja ArUco w IR, z wykorzystaniem w ten sposób przygotowanych danych przynosi istotne korzyści: działanie w ciemności i przy zerowej widzialności, możliwość ukrycia znacznika w paśmie widzialnym (niewidoczny dla człowieka), zwiększona odp orność na zakłócenia oświetleniowe, potencjalne zastosowanie w ratownictwie, wojsku, przemyśle ciężkim i autonomii mobilnej (np. drony w dymie).
4. Cel badań i metodyka badań
Celem badań było opracowanie dedykowanego potoku przetwarzania obrazów termowizyjnych, który umożliwi wiarygodne wykrywanie znaczników ArUco w warunkach termicznych. Badania miały na celu zwiększenie dokładności i niezawodności detekcji znaczników przez zastosowanie zaawansowanych technik przetwarzania wstępnego i analizy obrazu, dostosowanych do specyfiki termografii. W badaniach zastosowano wieloetapowy potok przetwarzania obrazu, w skład którego wchodziły: posteryzacja – ograniczenie liczby poziomów intensywności celem redukcji szumu, wygładzanie gradientu – eliminacja pasmowania temperatury przez filtrację adaptacyjną, wzmocnienie krawędzi – użycie zmodyfikowanego algorytmu Canny’ego, filtrowanie kierunkowe – usuwanie artefaktów pasmowania, progowanie adaptacyjne – binaryzacja oparta na lokalnym kontraście, dopasowanie do słownika znaczników – identyfikacja markerów przy użyciu słownika ArUco z podniesioną tolerancją błędów,
estymacja orientacji i pozycji 3D – wykorzystanie algorytmu solvePnP z macierzą kamery.
Dodatkowo opracowano interfejs użytkownika umożliwiający regulację parametrów przetwarzania w czasie rzeczywistym oraz obserwację wpływu poszczególnych etapów na wynik detekcji.
5. Opis badań
Przedmiotem badania jest skuteczność detekcji znaczników fiducjalnych ArUco w obrazach termowizyjnych [6] (IR) oraz opracowanie metod poprawiających niezawodność ich wykrywania w warunkach ograniczonego kontrastu i zakłóceń charakterystycznych dla termografii. Znaczniki ArUco, powszechnie stosowane w systemach wizyjnych do estymacji pozycji, kalibracji kamer i rozszerzonej rzeczywistości, zostały pierwotnie zaprojektowane z myślą o obrazach RGB o wysokim kontraście i ostrości. Ich bezpośrednie zastosowanie do obrazów IR okazuje się nieefektywne ze względu na szereg unikalnych właściwości obrazów termicznych. W ramach badań skupiono się na analizie wpływu charakterystycznych zjawisk występujących w obrazach termowizyjnych – takich jak pasmowanie gradientu temperatury, ograniczony zakres dynamiczny, szum termiczny, bezwładność cieplna oraz zmienna emisyjność materiałów – na jakość detekcji znaczników. Stwierdzono, że czynniki te prowadzą do zacierania konturów znaczników, generowania fałszywych krawędzi oraz zaburzenia wzorców binarnych, co znacząco obniża skuteczność działania standardowych algorytmów detekcji opartych na bibliotece OpenCV.
W celu zniwelowania wpływu tych czynników na pomyślne rozpoznanie znacznika, zaproponowany został algorytm detekcji znacznika ArUco (rys. 2) widniejącego na obrazie IR.
Rys. 2. Diagram opisujący etapy procesu rozpoznawania znaczników ArUco
Fig. 2. Diagram illustrating the stages of the ArUco marker recognition process
Etap I
W ramach pierwszego kroku, stosowane są metody mające na celu poprawę charakterystyki zdjęć, w sposób który zniweluje problematyczne aspekty wykonywania zdjęć w spektrum podczerwieni. Pierwszy krok to zastosowanie niewielkiej liczby posteryzacji, która celowo redukuje szczegółowość gradientów termicznych. Pomaga to zredukować liczbe artefaktów, ponieważ dalsza część algorytmu – wygładzanie gradientu – wymaga wtedy mniej operacji, aby uzyskać ostre przejścia między materiałami o wysokiej różnicy temperatur, czyli w tym przypadku pixeli ON/OFF. Bardziej jednolite obszary kolorystyczne są szczególnie istotne w drugim etapie, wykrywającym krawędzie znacznika, przed którym zdjęcie przechodzi jeszcze wzmocnienie krawędzi i redukcję pasmowania.
Jeżeli znana jest paleta barw użyta przy wykonywaniu zdjęć, możliwe jest zastosowanie na tym etapie, który w późniejszym czasie ma pozytywny wpływ na binaryzację odbywającą się w detektorze ArUco biblioteki OpenCV.
Na rysunku 3 przedstawiono mapowanie z palety standardowej IR na postać, w której występuje tylko jedna barwa. Jest to
szczególnie ważne, gdy zdjęcia źródłowe korzystają np. z palety „Rainbow”, w której intensywność koloru nie odpowiada bezpośrednio za wartość temperatury. W efekcie klasyczna binaryzacja nie może ich wiarygodnie przedstawić.
Etap II
Podczas drugiego etapu odbywa się przeszukiwanie obrazu w celu znalezienia regularnych krawędzi i detekcji położenia oraz orientacji znacznika. Zalecana implementacja powinna wykonać rozpoznawanie z użyciem różnych poziomów intensywności wykrywania krawędzi w celu poprawy jej działania niezależnie od różnic między zdjęciami, co zostało zaznaczone na diagramie (rys. 4).
Przypadek 1. (lewy) – minimalna poprawa, detekcja nieudana z powodu odbić termicznych.
Przypadek 2. (środkowy) – udana detekcja po przetworzeniu, wcześniej niemożliwa.
Przypadek 3. (prawy) – detekcja nieudana z powodu nasycenia termicznego.
Rys. 3. Mapowanie palety termowizyjnej do postaci reprezentowanej przez nasycenie jednego koloru Fig. 3. Mapping of the thermal palette to a form represented by the saturation of a single color
Rys. 4. Wyniki detekcji – oryginalne obrazy termowizyjne (u góry) i obrazy po przetworzeniu z wykrytymi znacznikami (u dołu)
Fig. 4. Detection results – original thermal images (top) and processed images with
(bottom)
Marcin Leplawy, Piotr Lipiński, Barbara Morawska, Jakub Zdanowicz-Zasidko
Tabela 1. Porównanie różnych podejść w zakresie rozpoznawania kodów ArUco
Table 1. Comparison of different approaches to ArUco code recognition
Hybrydowe podejście wykorzystujące głównie preprocessing
Opracowane dotąd rozwiązania [8]
Materiał znaczników
Koszt całościowy
Odporność na warunki zewnętrzne (np. opady, wysoka temperatura)
Możliwy do dostosowania względem warunków lub kosztów
System w wersji bazowej wymaga jedynie obrazowania podczerwonego
Algorytm uwzględnia korekcję zdjęć znaczników, które nie mają ostrych krawędzi lub są poddane nierównomiernemu rozkładowi temperatury
Rys. 5. Etapy rozpoznania kodu ArUco w IR
5. Stages of ArUco code recognition in infrared (IR) imagery
Etap III
W końcowym kroku, po wykryciu znacznika ArUco, wykorzystuje się funkcję odpowiadającą za odczyt identyfikatora znacznika oraz zwrócenie wyniku w postaci identyfikatora znacznika ArUco.
1. Obraz referencyjny RGB – znacznik ArUco w dobrych warunkach oświetleniowych, gdzie algorytmy standardowe działają bez problemu.
Wyraźne kontrasty pianki i podłoża umożliwiają łatwą identyfikację wzoru binarnego znacznika oraz jego granic.
2. Surowy obraz termowizyjny – obraz IR podobnego znacznika o tym samym ID ujawnia kluczowe wyzwania obrazowania termicznego.
Znacznik jest praktycznie niewidoczny z powodu: braku wyraźnego kontrastu termicznego między materiałami znacznika, nierównomiernej temp eratury powierzchni, odbić termicznych z otoczenia, szumu czujnika termowizyjnego.
3. Obraz po przetworzeniu:
Zastosowanie algorytmu przetwarzania znacząco poprawia widoczność znacznika przez:
Wyraźna rekomendacja jednego materiału, najczęściej akrylu
Oprócz kamery termowizyjnej, do osiągnięcia pełnej bazowej funkcjonalności, wymagany jest zakup działającego równolegle, dodatkowego systemu mapującego. Dodatkowy koszt wynika z wymagań odnośnie materiału znaczników
Jakość rozpoznawania zależna jest od dobrego stanu znaczników. Krawędzie zniekształcone, np. wpływem temperatury spowodowanej przez pożar, uniemożliwiają pracę w trudnych warunkach
wygładzanie gradientu, które eliminuje pasmowanie temperaturowe, posteryzację, redukujaca szum termiczny do bardziej regularnych wartości, wzmocnienie krawędzi, podkreślające granice znacznika, opcjonalne adaptacyjne progowanie, optymalizujące kontrast lokalny.
Rezultatem jest obraz, w którym struktura znacznika staje się wyraźnie rozróżnialna, mimo że nadal nie osiąga jakości obrazu RGB.
4. Wykryty kod ArUco: Finalna detekcja pokazuje pomyślne rozpoznanie znacznika
Holistyczne podejście względem tematyki problemowej pozwala na zrozumienie, z czego wynika trudność wykorzystania zdjęć IR. Użycie różnych form modyfikacji danych, przed zastosowaniem algorytmu wykrywającego, pozwala zmniejszyć wpływ wad tego typu formy obrazowania, jednocześnie umożliwiając wykorzystanie jego unikalnych możliwości. Rozpoznawanie markerów na podstawie tak przygotowanych danych zostało porównane z podejściem wykorzystującym jedynie modyfikację znaczników (tab. 1).
6. Podsumowanie
Testy przeprowadzono na zróżnicowanym zbiorze obrazów termowizyjnych, reprezentujących różne scenariusze środowiskowe i konfiguracje znaczników. Porównano skuteczność detekcji przed i po zastosowaniu zaproponowanego potoku przetwarzania. Uzyskano następujące wyniki: średni wzrost skuteczności detekcji znaczników ArUco o około 26 % w stosunku do metody bazowej, poprawa stabilności śledzenia znaczników w obecności szumu i niskiego kontrastu, skuteczna eliminacja pasmowania i artefaktów powodujących fałszywe detekcje.
Przypadki, w których detekcja nie powiodła się, mimo zastosowanego przetwarzania, dotyczyły głównie nasycenia termicznego lub odbić od powierzchni znacznika. W artykule zaprezentowano skuteczne podejście do poprawy detekcji znaczników ArUco w obrazach termowizyjnych, wykorzystujące dostosowany potok przetwarzania obrazu oraz interaktywny system do optymalizacji parametrów. Przeprowadzone analizy wskazują, że typowe parametry kamer termowizyjnych – w szczególności ich czułość termiczna określana jako NETD (ang. Noise Equivalent Temperature Difference) – są wystarcza-
Fig.
jące do realizacji omawianych algorytmów detekcji w warunkach spotykanych w klimacie umiarkowanym. Wyniki przeprowadzonych badan wskazują, że rozwój algorytmów detekcji opartych na obrazach termowizyjnych, w szczególności z użyciem uczenia maszynowego, wymaga uwzględnienia niestandardowych zależności przestrzenno-czasowych oraz zapewnienia odpowiedniego marginesu bezpieczeństwa w zakresie SNR (ang. signal-to-noise ratio). Jednocześnie największa wartość poznawcza testów algorytmów ujawnia się w warunkach granicznych, na pograniczu skuteczności detekcji.
Bibliografia
1. Garrido-Jurado S., Muñoz-Salinas R., Madrid-Cuevas F., Marín-Jiménez M., Automatic generation and detection of highly reliable fiducial markers under occlusion, “Pattern Recognition”, Vol. 47, No. 6, 2014, 2280–2292, DOI: 10.1016/j.patcog.2014.01.005.
2. Khattak S., Papachristos C., Alexis K., Marker Based Thermal-Inertial Localization for Aerial Robots in Obscurant Filled Environments, [In:] Advances in Visual Computing, Springer, 2018, 565–575, DOI: 10.1007/978-3-030-03801-4_49.
3. Sadzyński P., Metody zwiększania ilości danych termowizyjnych w uczeniu maszynowym, „Pomiary Automatyka Robotyka”, Vol. 28, No. 1, 2024, 97–106, DOI: 10.14313/PAR_251/97.
5. Mścichowski M., Sawicki K., Sosnowski T., Firmanty K., Kastek M., Bareła J., Metoda pomiaru parametrów kamer termowizyjnych za pomocą zautomatyzowanego stanowiska pomiarowego, „Pomiary Automatyka Robotyka”, Vol. 28, No. 3, 2024, 131–138, DOI: 10.14313/PAR_253/131.
Application
6. Holst G.C., Electro-optical Imaging System Performance, 6th ed., Washington: Society of Photo Optical, 2017, DOI: 10.1117/3.2588947.
7. Berral-Soler R., Muñoz-Salinas R., Medina-Carnicer R., Marín-Jiménez M.J., DeepArUco++: Improved detection of square fiducial markers in challenging lighting conditions, “Image and Vision Computing”, Vol. 152, 2024, DOI: 10.1016/j.imavis.2024.105313.
of Thermal Imaging Cameras for Visual Marker Detection and Tracking in Limited Visibility Conditions Using Artificial Intelligence Methods
Abstract: This article presents a system for detecting ArUco markers in thermal infrared (IR) images, designed to overcome the typical limitations of this imaging modality, such as low resolution, thermal noise, gradient banding, and the absence of distinct edges. Conventional fiducial marker detection algorithms, effective in RGB images, fail in IR environments due to the specific nature of thermal radiation. The author developed a multi-stage preprocessing pipeline including posterization, gradient smoothing, edge enhancement, and banding elimination, enabling accurate identification of binary ArUco patterns. Additionally, methods for estimating position and orientation in 3D space were implemented, along with adaptive binary thresholding with error tolerance tailored to thermal disturbances. The developed interactive system allows users to adjust image processing parameters in real time, significantly improving ArUco marker detection performance in varying environmental conditions. Tests conducted showed an approximately 26 % improvement in detection accuracy compared to standard approaches.
Adiunkt w Instytucie Informatyki Politechniki Łódzkiej. Autor kilkunastu publikacji naukowych z zakresu przetwarzania sygnałów i obrazów, systemów lokalizacji oraz sztucznej inteligencji. W 2024 r. obronił doktorat dotyczący lokalizacji obiektów z wykorzystaniem heterogenicznych pomiarów odległości. Uczestniczył w międzynarodowym projekcie Intercultural Excellence in Mechatronic Engineering Education (IEMEE) realizowanym na University of Melbourne w Australii.
Marcin Leplawy, Piotr Lipiński, Barbara Morawska, Jakub Zdanowicz-Zasidko
dr hab. inż. Piotr Lipiński, prof. PŁ piotr.lipinski@p.lodz.pl
ORCID: 0000-0002-8269-3802
Ukończył studia inżynierskie i magisterskie na kierunku elektrotechnika na Politechnice Łódzkiej (2000), uzyskał stopień doktora w dziedzinie informatyki na Politechnice Gdańskiej (2004), a stopień doktora habilitowanego w Polsko-Japońskiej Akademii Technik Komputerowych (2013). W latach 2005–2018 był adiunktem w Instytucie Informatyki Politechniki Łódzkiej, a od 2018 r. pracuje na stanowisku profesora uczelni w tej samej jednostce. Autor dwóch monografii, ponad 40 artykułów naukowych oraz autor patentu. Zainteresowania naukowe obejmują znakowanie cyfrowe, przetwarzanie sygnałów, transformaty adaptacyjne oraz lokalizację. Uczestnik i koordynator licznych projektów naukowych, przemysłowych i edukacyjnych. Laureat nagrody za najlepszy referat sesji podczas konferencji World Multi-Conference on Systemics, Cybernetics and Informatics w Orlando (USA) w 2007 r.
mgr inż. Barbara Morawska barbara.morawska@dokt.p.lodz.pl
ORCID: 0000-0002-5307-9424
Doktorantka w dziedzinie Informatyki Technicznej i Telekomunikacji na Wydziale Fizyki Technicznej, Informatyki i Matematyki Stosowanej Politechniki Łódzkiej od 2021 r. W tym samym roku uzyskała tytuł magistra Informatyki Stosowanej. Jej zainteresowania badawcze obejmują lokalizację, przetwarzanie sygnałów oraz uczenie maszynowe. Brała udział w wielu projektach badawczych i edukacyjnych, które zaowocowały publikacjami w renomowanych czasopismach oraz prezentacjami na prestiżowych konferencjach. Doświadczenie zawodowe zdobywała w zespołach badawczo-rozwojowych zajmujących się przetwarzaniem danych geograficznych i modelowaniem ruchu drogowego.
Jakub Zdanowicz-Zasidko
251668@edu.p.lodz.pl
ORCID: 0009-0005-1114-5576
Student kierunku Informatyka Stosowana prowadzonego przez Politechnikę Łódzką. Absolwent 9. Technikum im. KEN w Łodzi. Interesuje się robotyką, architekturą oprogramowania i systemami wbudowanymi. Hobbistycznie projektuje i wykonuje od postaw różne urządzenia elektroniczne, wykorzystując oprogramowanie CAD, metody nanoszenia ścieżek połączeniowych na laminaty miedziane i druk 3D.
Wizyjny system do wykrywania wtrąceń w elementach z tworzywa sztucznego wykorzystujący modele 3D
Paweł Rotter, Maciej Klemiato, Dawid Knapik, Maciej Rosół
AGH Akademia Górniczo-Hutnicza, Katedra Automatyki i Robotyki, al. Mickiewicza 30, 30-059 Kraków Grzegorz Putynkowski
Centrum Badań i Rozwoju Technologii dla Przemysłu S.A., ul. L. Waryńskiego 3A, 00-645 Warszawa
Streszczenie: W artykule przedstawiono koncepcję systemu do wykrywania wtrąceń, czyli wad występujących w postaci lokalnych przebarwień na powierzchniach elementów z tworzywa sztucznego produkowanych metodą wtrysku wysokociśnieniowego. System ten stanowi jeden z elementów większego systemu optycznej kontroli jakości elementów polimerowych, obejmującego także kontrolę geometrii. Wtrącenia mogą być skutecznie wykrywane jako obszary o niejednorodnej jasności, jednakże z badanego obrazu należy wcześniej wykluczyć krawędzie obiektu. Obraz krawędzi wyznaczany jest na podstawie modeli CAD produkowanych elementów, a zaproponowana metoda pary referencyjnej zapewnia precyzyjne nałożenie maski krawędzi na obraz badanego produktu. Algorytm został zaimplementowany w prototypie modułowego systemu kontroli jakości. Po odpowiednim dostrojeniu parametrów wykryte zostały wszystkie wtrącenia na zbiorze testowym, przy poziomie fałszywych alarmów akceptowalnym w zastosowaniach przemysłowych.
Słowa kluczowe: optyczna kontrola jakości, wtryski polimerowe, detekcja wtrąceń, skanowanie 3D, modele CAD
1. Wprowadzenie
Artykuł nawiązuje do badań zaprezentowanych we wcześniejszej publikacji autorów [10], w której opisano projekt oraz implementację systemu kontroli jakości wyrobów z tworzyw sztucznych wytwarzanych metodą wtrysku wysokociśnieniowego. Jedną z części tego systemu jest moduł detekcji wtrąceń, czyli lokalnych przebarwień na powierzchni produkowanych elementów, które stanowią wadę i powinny zostać wykryte w procesie kontroli jakości. Ze względu na fakt, że jest to drugi artykuł z cyklu, nie będziemy dokonywać tu przeglądu literatury dotyczącej metod wykrywania defektów, odsyłając do wcześniejszego artykułu [10] oraz do artykułów przeglądowych [8, 3, 9].
W artykule przedstawiamy zasadę działania modułu detekcji wtrąceń. Charakterystyczną cechą naszej metody jest wykorzystanie trójwymiarowych modeli kontrolowanych elementów, pomimo że wtrącenia wykrywane są na dwuwymiarowym obrazie. Jednakże trójwymiarowy model po odpowiednim dopasowaniu do obrazu kamery pozwala na precyzyjne zlokalizowanie krawędzi, a co za tym idzie odróżnienie zmienności intensyw-
Autor korespondujący:
Paweł Rotter, rotter@agh.edu.pl
Artykuł recenzowany nadesłany 29.03.2025 r., przyjęty do druku 27.06.2025 r.
Zezwala się na korzystanie z artykułu na warunkach licencji Creative Commons Uznanie autorstwa 4.0 Int.
ności obrazu wynikającej z obecności krawędzi od zmienności, której przyczyną jest wystąpienie wtrącenia.
Kontrolowane elementy produkowane są w stosunkowo niewielkich seriach, gdzie wolumeny są liczone w tysiącach. Produkcja wymaga częstych przezbrojeń, a system kontroli
Rys. 1. Obraz przykładowego elementu polimerowego (a) oraz powiększenie zaznaczonego fragmentu z widocznym wtrąceniem (b) Fig. 1. Image of a sample polymer element (a) and a zoomed view of the marked section with a visible inclusion (b)
powinien uwzględniać występowanie elementów różnego rodzaju w jednym ciągu produkcyjnym, gdyż elementy pochodzące z różnych wtryskarek są umieszczane na tym samym przenośniku taśmowym. Przykładowy element podlegający kontroli oraz powiększenie jego fragmentu zawierające wtrącenie przedstawiono na rys. 1.
2. Schemat metody
W przypadku białego elementu polimerowego wtrącenie jest widoczne jako ciemna plamka na jasnym tle. Jego wykrycie na jednorodnej powierzchni jest zatem pod względem algorytmicznym zadaniem bardzo prostym, które mogłoby być zrealizowane przy użyciu podstawowych metod analizy obrazu. W rzeczywistości jednak mamy do czynienia z elementami o złożonym kształcie. Duża liczba krawędzi i skomplikowana geometria badanych elementów powodują zarówno konieczność stosowania zaawansowanych algorytmów odpornych na występowanie krawędzi, jak również odpowiedniego systemu wizyjnego zapewniającego bezcieniowy obraz.
2.1. Etap 1: wyznaczenie maski krawędzi na podstawie modeli trójwymiarowych (off-line)
Pierwszym etapem na drodze do wyeliminowania krawędzi z dalszej analizy jest uzyskanie obrazu krawędzi. Może to zostać zrobione na podstawie dwuwymiarowego obrazu elementu przez zastosowanie detektora krawędzi, np. filtr Canny’ego [2], jednak otrzymany w ten sposób obraz krawędzi zawiera wiele zakłóceń, jest nieregularny i zależy od warunków, w których pozyskany był obraz oryginalny. Stąd po zaimplementowaniu i porównaniu obu metod zdecydowaliśmy się na wyznaczanie maski krawędzi na podstawie modeli trójwymiarowych. Dla zestawu kontrolowanych elementów dysponujemy dwoma rodzajami modeli trójwymiarowych: modele CAD, na podstawie których produkowane są elementy (rys. 2a), modele uzyskane przez autorów przez zeskanowanie elementów za pomocą trójwymiarowego skanera GOM Atos Scanbox (rys. 2b).
Skany wykonane własnoręcznie dokładniej odzwierciedlają rzeczywistą geometrię elementów, gdyż istnieją pewne różnice pomiędzy modelami CAD stosowanymi do produkcji a wyprodukowanymi elementami, wynikające z procesu technologicznego. Do różnic można zaliczyć np. ślady po wtrysku, czyli miejsca, gdzie stopione tworzywo zostało wprowadzone do formy lub ślady po wypychaczach czyli drobne odkształcenia na wypraskach powstałe podczas wypychania detalu po zakończeniu cyklu. Modele CAD często nie określają również precyzyjnego umieszczenia i treści datowników oraz oznaczników identyfikujących numery gniazd w formie, rodzaj materiału i datę produkcji.
Rys. 3. Przykładowy model STL zrzutowany na płaszczyznę 2D (a) oraz wygenerowana na jego podstawie maska (b)
Fig. 3. An example STL model projected onto a 2D plane (a) and a mask generated based on it (b)
Przykładowe różnice przedstawiono na rys. 2b. Jednakże z drugiej strony, w skanach tych powierzchnie aproksymowane są dużą liczbą trójkątów (pliki zapisywane są w formacie STL), przez co trudniej jest wyodrębnić istotne krawędzie. Z tego powodu do określenia lokalizacji krawędzi w module detekcji wtrąceń wykorzystaliśmy modele CAD. Procedura uzyskiwania maski krawędzi polega na zrzutowaniu modelu 3D na płaszczyznę 2D, równoległą do powierzchni, dla której generowana jest maska. Następnie krawędzie obrazu są pogrubiane za pomocą morfologicznej operacji dylatacji. Tak powstała maska jest obrazem binarnym, który po nałożeniu na analizowany obraz elementu z kamery wyklucza z analizy wtrąceń obszary reprezentowane przez czarne piksele, czyli krawędzie oraz tło. Przykład modelu STL zrzutowanego na płaszczyznę 2D i utworzoną z niego maskę obrazuje rys. 3.
2.2. Etap 2: przygotowanie par referencyjnych (off-line)
W kolejnym kroku na podstawie trójwymiarowego modelu zapisanego w pliku STL przygotowujemy maskę krawędzi przez rzutowanie modelu na płaszczyznę. Istotnym problemem jest konieczność precyzyjnego nałożenia maski krawędzi na obraz z kamery w momencie kontrolowania elementu. Istnieją efektywne i stosunkowo odporne algorytmy automatycznego dopasowywania obrazów (ang. image registration) wykorzystujące lokalne deskryptory obrazu typu SIFT [7] czy SURF [1], wymagają one jednak do prawidłowego działania
Rys. 2. Przykładowy model CAD wykorzystywany do produkcji elementu (a) oraz trójwymiarowy model otrzymany przez zeskanowanie elementu (b)
Fig. 2. Sample CAD model used for the production of the component (a) and the three-dimensional model obtained by scanning the element (b) a)
Pawel Rotter, Maciej Klemiato, Dawid Knapik, Maciej Rosół, Grzegorz Putynkowski
na wejściu dwóch obrazów w skali szarości, nie są natomiast w stanie efektywnie dopasować obraz w skali szarości do binarnego obrazu krawędzi.
Zaproponowaliśmy zatem podejście oparte na parach obrazów, nazwanych w dalszej części artykułu parami referencyjnymi. W skład każdej pary wchodzi: obraz w skali szarości, podobny do tego, który widzi kamera w trakcie procesu kontroli jakości, nazywany w dalszej części obrazem referencyjnym oraz obraz krawędzi uzyskany przez rzutowanie krawędzi trójwymiarowego modelu elementu. Krawędzie poddane są operacji dylatacji elementem strukturalnym o kształcie koła o promieniu d, dzięki czemu maska obejmuje obszary leżące w bezpośrednim sąsiedztwie krawędzi. Obydwa obrazy wchodzące w skład pary referencyjnej są dopasowane off-line i przechowywane w bazie danych.
lezionych parametrów transformacji na obraz z kamery nakładana jest maska krawędzi. Obrazy pary referencyjnej nałożone na siebie przy zastosowaniu wyznaczonej transformacji przedstawiono na rys. 5.
2.3. Etap 3: klasyfikacja
W procesie produkcyjnym elementy z różnych wtryskarek, a więc różnego kształtu, mogą być umieszczane na wspólnym taśmociągu. Z tego względu pierwszym etapem jest klasyfikacja elementu, która pozwoli na wybór odpowiedniej pary referencyjnej zawierającej maskę krawędzie dla konkretnego typu elementu. Klasyfikator wykonany jest w formie odrębnego modułu, na który składa się kamera Basler ace acA2440-35uc wyposażona w 5 MPx matrycę CMOS oraz wykonany w ramach projektu oświetlacz kopułowy (szczegóły i ilustracja w [10]), co zapewnia równomierne oświetlanie badanego obiektu [5, 6].
Proces tworzenia pary referencyjnej pokazano na rys. 4. Użytkownik zaznacza kilka par odpowiadających sobie punktów na obu obrazach: obrazie krawędzi wyznaczonym z modelu 3D (rys. 4a) i obrazie elementu pochodzącym z kamery (rys. 4b). W celu osiągnięcia większej dokładności użytkownik może korzystać z funkcji zoom. Na podstawie par punktów wskazanych przez użytkownika wyznaczona jest transformacja zapewniająca nałożenie na siebie obu obrazów. Obraz krawędzi po zastosowaniu tej transformacji zostaje zapisany w bazie danych wraz z obrazem pochodzącym z kamery jako para referencyjna. Dzięki temu podczas procesu kontroli jakości nałożenie maski krawędzi na obraz kamery może być dokonane automatycznie. Najpierw na obraz podlegający kontroli nakładany jest obraz referencyjny elementu (rys. 4b), a następnie na podstawie znaa)
Rys. 4. Obraz krawędzi wyznaczony bezpośrednio z modelu 3D (a) i obraz elementu (b)
Fig. 4. The edges determined directly from the 3D model (a) and the image of the element (b)
Rys. 5. Nałożone na siebie obrazy pary referencyjnej: krawędzie z modelu CAD (czerwone linie) oraz zapisany w bazie danych obraz elementu
Fig. 5. Superimposed images of the reference pair: edges from the CAD model (red lines) and the image of the element stored in the database
Klasyfikacja jest dokonywana w oparciu o konwolucyjną sieć neuronową typu SqueezeNet [4]. Wybór takiej architektury sieci został podyktowany jej stosunkowo dużą szybkością przy niewielkich wymaganiach sprzętowych – sieć SqueezeNet osiąga wydajność porównywalną z AlexNet przy zaledwie 5 MB pamięci na parametry (wagi). Czynniki te były istotne, gdyż sieć została zaimplementowana na mikrokomputerze Raspberry Pi 4, który jest znacznie mniej wydajny niż standardowe komputery klasy PC. Sieć została zmodyfikowana tak, aby rozpoznawała zadaną przez klienta liczbę klas. Wykorzystano uczenie transferowe, w którym model SqueezeNet wstępnie wytrenowany na zbiorze ponad miliona obrazów z bazy ImageNet został użyty jako punkt wyjścia do procesu uczenia na zestawie zarejestrowanych obrazów 15 typów dwustronnych elementów, czyli 30 klas. Zastosowano także augmentację danych – zestaw treningowy, który obejmował 10 obrazów na klasę, poprzez zastosowanie losowej rotacji i translacji został rozszerzony do 1000 obrazów w każdej klasie. Dane uczące i testowe podzielono w stosunku 70 : 30.
2.4.
Etap 4: maskowanie krawędzi i wykrywanie w trąceń
Po dokonaniu klasyfikacji z bazy danych wybierana jest odpowiednia para referencyjna. Należący do tej pary obraz w skali szarości jest nakładany na obraz elementu znajdującego się na taśmociągu. Dopasowanie przebiega w oparciu o metodę SIFT i wykorzystuje transformację obejmującą przesunięcie, skalowanie i obrót. W następnym kroku parametry transformacji wyznaczone przez to dopasowanie wykorzystane są do nałożenia maski referencyjnej na analizowany element, co zapewnia wyeliminowanie krawędzi z dalszych obliczeń.
Przed przystąpieniem do właściwej detekcji wtrąceń obraz badanego elementu jest poddany filtracji medianowej w celu usunięcia drobnych szumów. Detekcja polega na wykryciu obszarów o dużej lokalnej zmienności intensywności obrazu. W tym celu każdemu pikselowi obrazu o współrzędnych (x, y), za wyjątkiem pikseli oddalonych o mniej niż d od krawędzi obrazu, przypisana jest wartość odchylenia standardowego intensywności obrazu obliczana dla obszaru ograniczonego kwadratem [(x – d, y + d), (x – d, y + d)], przy czym przyjęliśmy d = 5. Obszary tak otrzymanego obrazu, które przekraczają ustaloną wartość progową Θ i równocześnie nie znajdują się w obszarze maski krawędzi uznawane są za wtrącenia.
3. Implementacja
W implementacji przyjęto założenie, że system będzie działał w czasie rzeczywistym przy prędkości taśmociągu wynoszącej 20 cm/s. Prototyp musiał także spełniać wymagania związane z pracą w środowisku przemysłowym. Ogólny schemat systemu przedstawiono na rys. 6. Do kontroli pracy poszcze-
6. Schemat systemu detekcji wtrąceń
gólnych elementów systemu wizyjnego wykorzystano sterownik PLC Siemens S7-1500. Podłączono do niego czujnik detekcji obecności elementu na taśmociągu (kurtyna świetlna), enkoder inkrementalny do pomiaru przemieszczenia elementów na taśmociągu oraz sygnały wyzwalania pomiarów przez podsystemy klasyfikatora i detekcji wtrąceń. Rozdzielczość pomiaru enkodera wynosi 60 000 impulsów na obrót, co przy średnicy wałka 39,7887 mm, umieszczonego na taśmociągu, daje rozdzielczość pomiaru przemieszczenia 2,08 μm. Znając położenie osi kamer modułów klasyfikacji i detekcji wtrąceń względem kurtyny optycznej określono położenia, dla których generowane były sygnały wyzwalające dla RPi 4B i XG-X2900. Po wyzwoleniu modułu klasyfikatora przez sterownik PLC następuje identyfikacja typu elementu aktualnie znajdującego się w polu widzenia kamery Basler aca2440. Informacja o typie rozpoznanego elementu zostaje wysłana łączem kablowym Ethernet (TCP/IP) do sterownika Keyence XG-X2900. Pozwala to na załadowanie właściwego obrazu referencyjnego, po wyzwoleniu
przez sterownik modułu detekcji wtrąceń. W efekcie działania tego ostatniego modułu do S7-1500 przesyłana jest informacja o akceptacji lub odrzuceniu badanego elementu. Wszystkie istotne informacje o działaniu systemu, łącznie ze zdjęciami z kamer, przesyłane są do komputera.
Zdjęcie prototypu systemu z wyróżnionymi sekcjami klasyfikatora i detekcji wtrąceń przedstawiono na rys. 7.
4. Testy systemu i wnioski
Przed wykonaniem testów dostrojono parametry algorytmu (w szczególności: wartość progową Q i wielkość otoczenia d), kierując się zasadą, iż przepuszczenie wadliwych elementów (ang. false negative) obniża wartość systemu w znacznie większym stopniu niż sygnalizowanie wtrąceń w prawidłowo wykonanych elementach (ang. false positive). W tym ostatnim przypadku odrzucone elementy mogą zostać ponownie
wtrąceń. Po prawej stronie moduł klasyfikacji (elementy poruszają się od prawej do lewej), po lewej stronie właściwy moduł detekcji wtrąceń
Rys.
Fig. 6. Diagram of the inclusion detection system
Rys. 7. Prototyp systemu detekcji
Fig. 7. Prototype of the inclusion detection system. On the right side, the classification module (components move from right to left), and on the left side, the actual inclusion detection module
Pawel Rotter, Maciej Klemiato, Dawid Knapik, Maciej Rosół, Grzegorz Putynkowski
skontrolowane przez pracowników, a incydentalne przypadki odrzucenia prawidłowych elementów nie stanowią dużej straty, natomiast wystąpienie nawet pojedynczych wadliwych elementów może skutkować odrzuceniem przez klienta całej partii towaru, co skutkuje dużymi stratami zarówno materialnymi jak wizerunkowymi.
Po odpowiednim dostrojeniu parametrów system był testowany na 79 elementach, na których eksperci z Centrum Badań i Rozwoju Technologii dla Przemysłu wskazali łącznie 261 wtrąceń. Wszystkie te wtrącenia zostały poprawnie wykryte przez system. Dodatkowo system wykrył 40 wtrąceń, których eksperci nie zasygnalizowali. Są to miejsca, w których występują lokalne różnice w barwie powierzchni, jednak na tyle małe pod względem obszaru lub różnicy w stopniu szarości, że w większości przypadków nie stanowiłyby powodu do odrzucenia produktu. System jest w stanie wykrywać wtrącenia o średnicy od 0,35 mm, jak również nieznaczne zmiany stopnia szarości, trudno dostrzegalne gołym okiem. Przyjęto więc założenie, że nieregularności, które nie zostały zauważone i zaklasyfikowane przez ekspertów jako wtrącenia można uznać za fałszywe wykrycia. Wyznaczone na tej podstawie wartości precyzji (ang. precision) i czułości (ang. recall) wynoszą odpowiednio: 87 i 100. Są to wartości akceptowalne w zastosowaniach przemysłowych.
Podziękowania
Badania były częściowo finansowane przez Narodowe Centrum Badań i Rozwoju, grant nr POIR.01.01.01-00-0116/20-00 oraz Ministerstwo Nauki i Szkolnictwa Wyższego z subwencji 11.11.120.815. Dziękujemy zespołowi badaczy i inżynierów CBRTP S.A. za współpracę podczas budowy prototypu oraz firmie Hanplast sp. z o.o. za konstruktywne dyskusje, przekazanie próbek wadliwych elementów i szczegółowe prezentacje linii produkcyjnych.
Bibliografia
1. Bay H., Ess A., Tuytelaars T., Van Gool L., Speeded-Up Robust Features (SURF), “Computer Vision and Image Understanding”, Vol. 110, No. 3, 2008, 346–359, DOI: 10.1016/j.cviu.2007.09.014.
2. Canny J., A Computational Approach To Edge Detection, “IEEE Transactions on Pattern Analysis and Machine Intelligence”, Vol. PAMI-8, No. 6, 1986, 679–698, DOI: 10.1109/TPAMI.1986.4767851.
4. Iandola F.N., Moskewicz M.W., Ashraf K., Han S., Dally W.J., Keutzer K., SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and <1MB model size, ICLR, (2017).
5. Li B., Wang J., Gao Z., Gao N., Light Source Layout Optimization Strategy Based on Improved Artificial Bee Colony Algorithm, “Mathematical Problems in Engineering”, 2021, DOI: 10.1155/2021/8099757.
6. Liu L., Wang H., Yu B., Xu Y., Shen J., Improved algorithm of light scattering by a coated sphere, “China Particuology”, Vol. 5, No. 3, 2007, 230–236, DOI: 10.1016/j.cpart.2007.03.003.
7. Lowe D.G., Object recognition from local scale-invariant features, International Conference on Computer Vision, Kerkyra, Corfu, 1999, DOI: 10.1109/ICCV.1999.790410.
8. Luo Q., Fang X., Su J., Zhou J., Zhou B., Yang C., Liu L., Gui W., Tian L., Automated Visual Defect Classification for Flat Steel Surface: A Survey, “IEEE Transactions on Instrumentation and Measurement”, Vol. 69, No. 12, 2020, 9329–9349, DOI: 10.1109/TIM.2020.3030167.
9. Ren Z., Fang F., Yan N., Wu Y., State of the Art in Defect Detection Based on Machine Vision, “International Journal of Precision Engineering and Manufacturing-Green Technology”, Vol. 9, 2021, 661–691, DOI: 10.1007/s40684-021-00343-6.
10. Rotter P., Klemiato M., Knapik D., Rosół M., Putynkowski G., Modułowy system wieloaspektowej optycznej kontroli jakości elementów polimerowych, „Pomiary Automatyka Robotyka”, Nr 4, 2024, 97–102, DOI: 10.14313/PAR_254/97.
Computer Vision System for the Detection of Inclusions in Plastic Components with the Use of 3D Models
Abstract: The article presents the concept of a system for the detection of inclusions, which are defects appearing as local discolorations on the surface of plastic components manufactured using high-pressure injection molding. This system is a part of a broader optical quality control system for polymer components, which also includes geometric inspection. Inclusions can be effectively detected as areas of non-uniform brightness. However, as the first step the object edges must be excluded from the analyzed image. The edge image is determined based on CAD models of the manufactured components, and the proposed reference pair method ensures precise alignment of the edge mask with the image of the inspected product. The algorithm was implemented in the prototype of a modular quality control system. After appropriate parameter tuning, all inclusions in the test dataset were successfully detected, with the false alarm rate maintained at a level acceptable for industrial applications.
dr hab. inż. Paweł Rotter, prof. AGH rotter@agh.edu.pl
ORCID: 0000-0002-1556-6539
Zatrudniony na stanowisku profesora uczelni na Wydziale Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Akademii Górniczo-Hutniczej w Krakowie, w Katedrze Automatyki i Robotyki. W przeszłości pracował w Laboratorium Sztucznej Inteligencji i Analizy Danych Uniwersytetu Arystotelesa w Salonikach, na Politechnice Krakowskiej oraz we Wspólnotowym Centrum Badawczym (JRC) w Sewilli. Jego zainteresowania badawcze obejmują przetwarzanie i analizę obrazu, uczenie maszynowe i sztuczną inteligencję.
dr inż. Grzegorz Putynkowski grzegorz.putynkowski@cbrtp.pl
ORCID: 0000-0003-0261-6194
Uzyskał tytuł magistra w zakresie systemów teleinformatycznych oraz elektroenergetyki przemysłowej na Uniwersytecie Technologiczno-Humanistycznym w Radomiu i Uniwersytecie Technologiczno-Rolniczym w Bydgoszczy. Doktorant w Instytucie Mechatroniki i Systemów Informatycznych Politechniki Łódzkiej. Autor i współautor licznych publikacji z zakresu rynku energii, odnawialnych źródeł energii i nanostruktur. Posiada kilkunastoletnie doświadczenie w zarządzaniu projektami badawczo-rozwojowymi w Polsce i za granicą oraz komercjalizacji wyników badań.
dr inż. Dawid Knapik knapik@agh.edu.pl
ORCID: 0000-0002-3029-886X
Uzyskał stopień doktora w dyscyplinie Automatyka, Elektronika, Elektrotechnika i Technologie Kosmiczne w 2024 r. Obecnie pracuje w Katedrze Automatyki i Robotyki Akademii Górniczo-Hutniczej. Jego główne zainteresowania badawcze obejmują sterowania zdecentralizowane, sterowanie w czasie rzeczywistym oraz systemy wbudowane.
dr inż. Maciej Klemiato
mkl@agh.edu.pl
ORCID: 0000-0003-0052-7083
Uzyskał stopień doktora w dyscyplinie Automatyka i Robotyka na Wydziale Elektrotechniki, Automatyki, Informatyki i Elektroniki Akademii Górniczo-Hutniczej w 2001 r. Obecnie pracuje na stanowisku adiunkta w Katedrze Automatyki i Robotyki AGH. Jego zainteresowania badawcze koncentrują się na algorytmach sterowania, uczeniu maszynowym w zastosowaniach przemysłowych i systemach wizyjnych.
dr inż. Maciej Rosół
mr@agh.edu.pl
ORCID: 0000-0003-1176-7904
Pracuje jako adiunkt na Wydziale Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Akademii Górniczo-Hutniczej w Krakowie. Jego obszary badawcze obejmują modelowanie i sterowanie nieliniowymi procesami dynamicznymi w czasie rzeczywistym; opracowywanie algorytmów sterowania w oparciu o model procesu; uczenie maszynowe, projektowanie systemów wbudowanych w aplikacjach pomiarowych/sterujących oraz sterowanie rozproszone z wykorzystaniem przemysłowych sieci Ethernet.
System automatycznego regulowania temperatury w żelazku w oparciu o technikę RFID
Bartosz Pawłowicz, Nikita Bailiuk, Paweł Wróbel, Marcin Goral
Politechnika Rzeszowska, Wydział Elektrotechniki i Informatyki, ul. Wincentego Pola 2, 35-959 Rzeszów
Streszczenie: W artykule zaprezentowano innowacyjny projekt żelazka zintegrowanego z technologią RFID, który wpisuje się w szerszą koncepcję Internetu Rzeczy Tekstyliów. Celem projektu było opracowanie urządzenia zdolnego do automatycznego odczytu informacji z identyfikatorów RFID wszytych w tkaniny oraz dynamicznego dostosowywania temperatury prasowania do rodzaju materiału. Opisano budowę urządzenia, w tym konstrukcję płytki PCB, układ sterowania mocą grzewczą oraz zastosowane rozwiązania minimalizujące zakłócenia elektromagnetyczne.
Słowa kluczowe: RFID, regulator, chmura obliczeniowa, interaktywne ubrania
1. Wprowadzenie
W dobie dynamicznego rozwoju inteligentnych technologii, dążenie do pełnej automatyzacji procesów stało się jednym z kluczowych elementów w projektowaniu nowoczesnych urządzeń domowych. Wraz z rosnącą popularnością Internetu Rzeczy IoT (ang. Internet of Things ), pojawiły się koncepcje zastosowania tej technologii w przemyśle tekstylnym, w ramach tzw. Internet of Things in Textile Industry [1]. Jest to nowatorskie podejście, które łączy zaawansowane technologie identyfikacji, takie jak RFID (ang. Radio Frequency Identification), z urządzeniami domowymi, umożliwiając automatyczne dostosowywanie parametrów pracy tych urządzeń na podstawie specyficznych informacji o wyrobach włókienniczych. W rezultacie procesy prania, suszenia i prasowania mogą być nie tylko bardziej precyzyjne, ale także zoptymalizowane pod kątem zużycia energii i ochrony materiałów [2, 3].
Każdy użytkownik dbający o swoją garderobą, musi dostosować parametry prania i prasowania do rodzaju materiału [4]. Nieodpowiedni dobór temperatury lub programu może prowadzić do nieodwracalnych uszkodzeń tkanin, co wpływa na trwałość odzieży oraz generuje dodatkowe koszty. Aby wyeliminować ten problem, nowoczesne urządzenia gospodarstwa domowego mogą wykorzystać technologię RFID do precyzyjnego odczytywania i automatycznego dostosowania parametrów pracy na podstawie danych zapisanych w identyfikatorach RFID wszytych w wyroby włókiennicze [5].
Autor korespondujący:
Marcin Goral, m.goral@prz.edu.pl
Artykuł recenzowany nadesłany 05.06.2025 r., przyjęty do druku 04.09.2025 r.
Żelazko zintegrowane z RFID jest krokiem w stronę automatyzacji procesów konserwacji wyrobów tekstylnych. W przeciwieństwie do tradycyjnych rozwiązań wymagających manualnego ustawiania parametrów prasowania, opracowane żelazko automatycznie rozpoznaje materiał i dostosowuje odpowiednią temperaturę prasowania. Tego rodzaju funkcjonalność nie tylko zwiększa wygodę użytkowania, ale także znacząco obniża ryzyko uszkodzenia tekstyliów. Projekt ten wpisuje się w szerszą koncepcję budowy spójnego ekosystemu dla tekstyliów, w którym inteligentne urządzenia, m.in. pralki, suszarki i żelazka mogą współpracować, tworząc kompleksowy system zarządzania procesami konserwacji odzieży z funkcją RFID w gospodarstwie domowym [6]. Celem artykułu jest przedstawienie szczegółów technicznych oraz omówienie funkcjonalności prototypu żelazka z RFID w kontekście jego integracji z IoT. W kolejnych sekcjach omówione zostaną kluczowe zagadnienia technologiczne, projekt urządzenia demonstracyjnego oraz przeprowadzone testy.
2. RFID
Radio Frequency Identification to technologia umożliwiająca identyfikację obiektów za pomocą fal radiowych, bez potrzeby fizycznego kontaktu. Podstawą RFID jest komunikacja między dwoma głównymi elementami: transponderem, zwanym także identyfikatorem oraz czytnikiem [7, 8]. Identyfikatory RFID są wyposażone w antenę oraz układ scalony, który przechowuje dane o obiekcie, a odczyt tych danych jest możliwy dzięki falom radiowym wysyłanym przez czytnik. W momencie, gdy czytnik zbliża się do identyfikatora, ten automatycznie odpowiada, przekazując przechowywane informacje. Dzięki temu możliwe jest szybkie i precyzyjne zbieranie danych, co ma szerokie zastosowanie w logistyce, produkcji, handlu detalicznym i wielu innych branżach [9–11].
Zasadę działania RFID, ze względu na różnice w konstrukcji i sposobie zasilania identyfikatorów, można podzielić na cztery
Rys. 1. Schematy identyfikatorów RFID, a) pasywny, b) półpasywny z odzyskiwaniem energii, c) półpasywny, d) tekstroniczny
Fig. 1. Diagrams of RFID tags, a) passive, b) semi-passive with energy harvest, c) semi-passive, d) textronic
główne typy: pasywne (rys. 1a), półpasywne z systemem zbierania energii (rys. 1b), półpasywne (rys. 1c) i tekstroniczne (rys. 1d). Identyfikatory pasywne nie mają własnego źródła zasilania, a energię potrzebną do transmisji sygnału pobierają z fal radiowych wysyłanych przez czytnik. Dzięki temu są bardzo tanie i trwałe, jednak ich zasięg odczytu jest ograniczony [12]. Z kolei identyfikatory półpasywne i aktywne wyposażone są w baterie, co pozwala na zwiększenie zasięgu transmisji i dodanie dodatkowych funkcji, takich jak rejestrowanie danych w czasie rzeczywistym. Identyfikatory tekstroniczne to szczególna kategoria tagów RFID, które integrują układy elektroniczne z tekstyliami, co czyni je częścią rozwijającej się dziedziny tekstroniki (ang. textronics). Tekstronika łączy technologie elektroniczne z materiałami tekstylnymi, umożliwiając tworzenie inteligentnych tekstyliów zdolnych do przetwarzania danych oraz komunikacji z innymi urządzeniami. Technologia RFID jest zatem bardzo elastyczna i dostosowywalna do różnych zastosowań, od kontroli zasobów magazynowych, po śledzenie transportu towarów.
Tekstroniczne tagi RFIDtex (rys. 2) bazują na technologii RFID, ale ich kluczową cechą jest osadzenie układu elektronicznego na tekstylnym podłożu, co pozwala na ich bezproblemową integrację z odzieżą. RFIDtex może być traktowany jako element tekstroniki, ponieważ transponder RFID jest wbudowany bezpośrednio w strukturę tekstylną. W porównaniu do tradycyjnych identyfikatorów RFID, RFIDtex gwarantuje większą elastyczność mechaniczną, możliwość prania oraz pełną kompatybilność z procesami stosowanymi w przemyśle odzieżowym. W porównaniu do innych technologii identyfikacyjnych, takich jak kody kreskowe, RFID wyróżnia się licznymi zaletami. Po pierwsze, odczyt identyfikatorów RFID nie wymaga bezpośredniej widoczności, co pozwala na ich umieszczanie
Rys. 2. Identyfikator RFIDtex
Fig. 2. RFIDtex tag
w trudno dostępnych miejscach, gdzie tradycyjna technologia kodów kreskowych nie mogłaby zostać zastosowana. Po drugie, identyfikatory RFID mogą przechowywać więcej informacji niż kody kreskowe, co pozwala na zapisanie szczegółowych danych o obiekcie. Po trzecie, RFID umożliwia jednoczesny odczyt wielu identyfikatorów w jednym obszarze, co znacząco zwiększa efektywność procesów, szczególnie w zastosowaniach przemysłowych [13].
RFID w ciągu ostatnich lat przeszedł znaczną ewolucję, która pozwoliła na rozwój zastosowań tej technologii w branży urządzeń domowych i automatyzacji codziennych czynności. Przyszłość RFID to integracja z systemami IoT, gdzie urządzenia mogą się komunikować ze sobą, wymieniając dane i dostosowując swoje działania do potrzeb użytkownika. W takich aplikacjach RFID staje się częścią bardziej złożonego ekosystemu, który pozwala na automatyzację procesów w skali nieosiągalnej dotychczas przy użyciu innych technologii. Dzięki zastosowaniu RFID, urządzenia z grupy IoT mogą nie tylko identyfikować obiekty, ale także automatycznie dostosowywać swoje parametry pracy na podstawie zapisanych informacji, tworząc w pełni zautomatyzowane systemy zarządzania danymi. Wprowadzenie RFID jako podstawy komunikacji w systemach IoT daje ogromne możliwości rozwoju, zwłaszcza w zarządzaniu tekstyliami, które omówione zostaną szczegółowo w kolejnym punkcie.
3. IoT w Przemyśle Tekstylnym
Internet of Things in Textile Industry to koncepcja, która odnosi się do ekosystemu połączonych urządzeń zarządzających tekstyliami w czasie rzeczywistym. Urządzenia RFID oraz chmura obliczeniowa tworzą środowisko, w którym każde urządzenie może automatycznie dostosowywać swoje parametry na podstawie informacji zapisanych w identyfikatorów RFID zintegrowanych z tekstyliami [14, 15].
Zastosowanie IoT in Textile Industry umożliwia zarządzanie całym cyklem konserwacji odzieży, począwszy od prania i suszenia, przez prasowanie, aż po przechowywanie i analizę zużycia tekstyliów. System oparty na chmurze umożliwia zbieranie danych i ich analizę, co może służyć do opracowywania nowych strategii konserwacji tekstyliów oraz optymalizacji parametrów urządzeń. Dzięki temu programy prania i prasowania mogą być aktualizowane automatycznie, aby dostosować się do nowych rodzajów materiałów, które trafiają na rynek. Żelazko wyposażone w RFID odczytuje dane z identyfikatorów RFIDtex wszytych w ubrania i na ich podstawie automatycznie dostosowuje temperaturę prasowania. Oprócz temperatury, identyfikatory RFIDtex mogą przechowywać dodatkowe informacje, np. preferowany poziom wilgotności oraz dopuszczalne parametry nacisku mechanicznego, które również wpływają na jakość prasowania i ochronę tekstyliów przed uszkodzeniami. Dzięki temu system ma potencjał do dalszej rozbudowy w kierunku uwzględniania większej liczby parametrów wpływających na efektywność prasowania. W ekosystemie Internet of Things in Textile Industry urządzenia przeznaczone do pracy z tekstyliami, współpracując z chmurą mogą również korzystać z systemu wirtualnej szafy, która zawiera szczegółowe informacje o składzie materiałowym odzieży i zalecanych warunkach konserwacji. Dzięki dostępowi do takiej bazy danych system może precyzyjnie określać optymalne parametry prasowania dla konkretnego rodzaju tkaniny, eliminując konieczność ręcznej regulacji przez użytkownika. Propozycję takiego rozwiązania przedstawiono na rys. 3. Integracja RFIDtex z IoT tworzy zautomatyzowany ekosystem, w którym wszystkie procesy są optymalizowane i synchronizowane, ograniczając rolę użytkownika do minimum. Dzięki temu możliwe jest nie tylko usprawnienie codziennych
Rys. 3. Koncepcja wykorzystania żelazka z systemem RFID zintegrowanego z Internetem w Przemyśle Tekstylnym Fig. 3. The concept of using an RFID-enabled iron integrated with the Internet of Things in Textile Industry
czynności, ale również wydłużenie żywotności tekstyliów oraz zmniejszenie zużycia energii. Takie rozwiązanie może potencjalnie przyczynić się do redukcji negatywnego wpływu na środowisko, jednak weryfikacja rzeczywistych oszczędności energii i wpływu na ekologię wymagałaby dalszych badań. Ekosystem IoT z wykorzystaniem RFIDtex stanowi zatem przyszłościowe rozwiązanie, które wpisuje się w trend rozwoju inteligentnych domów i automatyzacji procesów konserwacji odzieży.
4. Inteligentne Żelazko
W ramach koncepcji IoTT i inteligentnych urządzeń domowych powstał prototyp urządzenia prasującego opartego na komunikacji RFID oraz chmurze obliczeniowej. Komunikacja składa się z dwóch etapów: identyfikator RFID w materiale tekstylnym – czytnik RFID działający w paśmie UHF; mikrokontroler urządzenia prasującego – chmura obliczeniowa (rys. 4).
Projekt inteligentnego żelazka z modułem RFID jest kluczowym elementem niniejszego artykułu, który w pełni demonstruje możliwości integracji techniki RFID z domowym urządzeniem AGD. Celem tego projektu było zbudowanie żelazka, które automatycznie odczytuje informacje zapisane w identyfikatorach RFID wszytych w tkaniny i na tej podstawie dostosowuje temperaturę prasowania do konkretnego wyrobu tekstylnego. Innowacyjność rozwiązania polega na bezobsługowym dostosowaniu parametru prasowania, co zwiększa wygodę użytkowania i minimalizuje ryzyko uszkodzenia tkanin. Dane zapisane w identyfikatorze RFID są niezbędne do regulacji temperatury prasowania. Informacje te są wpisywane do pamięci identyfikatora RFID na etapie produkcji materiału. Choć dane wprowadzone do pamięci identyfikatora na etapie
Rys. 4. Komunikacja między danymi w ubraniach a chmurą obliczeniową Fig. 4. Communication between wearable data and cloud computing
produkcji zawierają kluczowe informacje niezbędne do działania urządzenia, to komunikacja z chmurą pozwala na aktualizację danych, pobranie większej liczby informacji, w tym bardziej złożonych, a także umożliwia zarządzanie materiałem w wirtualnej szafie. Zastosowanie takich rozwiązań umożliwia łatwe zarządzenia naszymi tekstyliami wraz z integracją z pozostałymi modułami inteligentnych urządzeń AGD, np. urządzeniem piorącym. Inteligentne żelazko opracowane w celach badawczych ma dodatkowy układ zarządzania energią, układ komunikacji oraz system obsługi zewnętrznych modułów peryferyjnych, takich jak wyświetlacz LCD oraz czytnik RFID. Na płytce PCB wbudowano dedykowane złącza dla przyszłych peryferiów, umożliwiając rozszerzenie systemu o dodatkowe elementy, takie jak czujniki śro dowiskowe czy dodatkowe interfejsy komunikacyjne, co w przyszłości mogłoby zwiększyć funkcjonalność urządzenia. Główną ścieżką badawczą tego projektu było zarządzanie i komunikacja z układem inteligentnego urządzenia prasującego wraz z dostosowaniem i regulacją parametrów grzania oraz odczytem danych z identyfikatorów RFID w związku z obecnością metalowej płyty grzejnej. Ze względu na wpływ elementów metalowych na transmisję RFID, konieczne było odpowiednie umiejscowienie czytnika, co zoptymalizowano w toku badań. Jak wspomniano dla urządzenia prasującego opracowano zewnętrznych układ sterujący integrując go z głównym kontrolerem urządzenia prasującego. Płytka prototypowa składa się z czterech głównych sekcji: zasilania, detekcji przejścia przez zero, sterowania mocą grzejną oraz mikrokontrolera z peryferiami. Uproszczony schemat urządzenia pokazano na rys. 5.
Sekcja zasilania wykorzystuje przetwornicę step-down, która przetwarza napięcie sieciowe 230 V do poziomu 5 V napięcia stałego, zapewniając izolację napięciową oraz ochronę przed przegrzaniem.
Rys. 5. Uproszczony schemat ideowy modelu żelazka Fig. 5. Simplified conceptual diagram of the model iron
Detekcja przejścia przez zero jest realizowana za pomocą transoptora. Sygnał z mostka prostowniczego trafia na wejście transoptora. Kiedy wartość sygnału przechodzi przez zero, prąd płynący przez diodę LED w transoptorze jest znikomy. Wzrost napięcia inicjując prąd bazowy w fototranzystorze sprawia, że przepływ prądu kolektor-emiter odczytywany jest przez mikrokontroler, co pozwala mu rozpoznać moment przejścia sieci AC przez punkt zerowy. Transoptor pełni również rolę izolacji galwanicznej między siecią AC a mikrokontrolerem.
Sterowanie mocą elementu grzejnego żelazka realizowane jest z kolei poprzez połączenie transoptora i triaka. Transoptor zapewnia izolację galwaniczną, a krótkie impulsy wyzwalające synchronizowane są z przebiegiem AC. Ich opóźnienie decyduje o aktywacji triaka, pozwalając na precyzyjną regulację temperatury. Wyłączenie sygnału wyzwalającego zatrzymuje emisję światła z diody LED transoptora, co przerywa dopływ prądu do grzałki.
Całe urządzenie jest zarządzane za pomocą mikrokontrolera RP2040 osadzonego na płytce Raspberry Pi Pico W, do której podłączono moduł RFID, wyświetlacz LCD oraz czujnik temperatury. Odłączono fabryczny termostat, a jego funkcje przejął regulator cyfrowy. Zastosowany czujnik temperatury jest dodatkowym elementem systemu sterowania i nie jest to fabryczny czujnik żelazka. Mikrokontroler przetwarza sygnały z sekcji detekcji przejścia przez zero oraz sterowania mocą grzejną, co umożliwia automatyczne dostosowanie parametrów prasowania do specyfikacji odczytanej z identyfikatorów RFID. Wykorzystanie modelu Raspberry Pi Pico w wersji W pozwala na komunikację z zewnętrzną chmurą obliczeniową w celu wymiany i weryfikacji danych.
Wszystkie elementy zostały umieszczone na płytce PCB (rys. 6). Lewą stronę układu zaprojektowano z myślą o złączach dla urządzeń peryferyjnych, transoptorze oraz czujniku temperatury. W centralnej części płytki umieszczono sterownik triaka, rezystory ograniczające prąd oraz mostek prostowniczy. Po prawej stronie umieszczono przetwornicę oraz złącze termopary. W górnej części płytki zlokalizowano mikrokontroler. Dodatkowo płytka zawiera slot na bezpiecznik, złącze dla płyty grzejnej żelazka oraz zasilanie sieciowe AC.
Działanie programu sterującego przedstawiono na rys. 7. Główna pętla programu rozpoczyna się od sprawdzenia, czy minął odpowiedni czas opóźnienia dla czujnika temperatury. Jeśli tak, odczytywana jest rzeczywista temperatura z czujnika, a następnie obliczana jest wartość PID, która pozwala dostosować działanie systemu grzewczego do ustawionej temperatury. Wartość PID jest ograniczana do ustalonego zakresu, aby zapewnić stabilność działania (rys. 7a).
Rys. 7. Schemat blokowy program sterującego systemem Fig. 7. Block diagram of the system control program
Następnie, jeśli system wykryje przejście przez zero w cyklu napięcia, obliczane jest odpowiednie opóźnienie dla wyzwolenia triaka, zależne od wartości PID, co umożliwia precyzyjne sterowanie mocą grzewczą. Triak jest aktywowany na krótki czas, aby wprowadzić odpowiednią ilość energii do grzałki, a po zakończeniu resetowana jest flaga przejścia przez zero (rys. 7b).
W kolejnym etapie sprawdzane jest, czy minął określony czas od ostatniego sprawdzenia identyfikatora RFID. Jeśli tak, moduł RFID odczytuje obecność znacznika tekstronicznego i pobiera jego unikalny identyfikator, który jest następnie porównywany z zapisanymi wartościami, aby ustalić, czy identyfikator odpowiada znanemu punktowi nastawczemu temperatury. Jeśli tag jest rozpoznany, wartość temperatury zostaje odpowiednio ustawiona, w przeciwnym razie system informuje o nieznanej karcie (rys. 7c).
W końcowej części algorytmu pętla programu sprawdza, czy upłynął czas wymagany do aktualizacji wyświetlacza LCD. Jeśli tak, funkcja odpowiedzialna za wyświetlanie aktualizuje informacje na ekranie, pokazując bieżącą i docelową temperaturę. Program resetuje licznik czasu, aby móc śledzić kolejne aktualizacje, a cała pętla rozpoczyna się ponownie. Dzięki temu cyklicznemu działaniu program umożliwia zmianę nastaw, dostosowując moc grzania, reagując na obecność kart RFID i aktualizując wyświetlacz w regularnych odstępach czasu.
Funkcja wyświetlania temperatury docelowej i rzeczywistej na ekranie, aktualizuje wartości tylko w przypadku ich zmiany. Na początku sprawdzane jest, czy temperatura docelowa różni się od poprzedniej wartości; jeśli tak, ekran jest czyszczony po czym wyświetla nową wartość wraz z jednostką. W dalszym kroku funkcja sprawdza, czy rzeczywista temperatura również uległa zmianie; jeśli tak, usuwa starą wartość z ekranu i rysuje nową, odpowiednio rozmieszczając tekst i symbole. Wartości temperatur są formatowane oraz odpowiednio skalowane, aby zachować czytelność i estetykę na ekranie. Na końcu program zapamiętuje wyświetlane wartości, aby móc wykryć przyszłe zmiany i zaktualizować ekran tylko wtedy, gdy jest to konieczne (rys. 7d).
Rys. 6. Układ elektronicznego sterowania temperaturą żelazka Fig. 6. Electronic iron temperature control system
5. Testy urządzenia
W ramach testów sprawdzono działanie prototypu opracowanego sterownika. W trakcie testów wykazano, że umieszczenie czytnika RFID wewnątrz urządzenia skutkowało całkowitym brakiem możliwości odczytu danych z identyfikatorów RFID. Wyniki eksperymentów jednoznacznie potwierdziły, że sygnał czytnika nie może przeniknąć przez metalową płytę żelazka, niezależnie od kąta ustawienia anteny czy jej położenia wewnątrz urządzenia. Testy obejmujące różne konfiguracje potwierdziły negatywny wpływ metalowej grzałki na skuteczność transmisji sygnału. W odpowiedzi na te problemy podjęto decyzję o przeniesieniu anteny RFID poza urządzenie, co umożliwiło poprawne odczytywanie danych (rys. 8).
Rys. 8. Model demonstracyjny żelazka wraz z zamontowanym układem sterowania mocą grzejną
Fig. 8. Demonstration model of the iron with the heating power control system installed
Antena została umieszczona na zewnątrz żelazka, pod płytą grzewczą, co pozwoliło na znaczącą poprawę skuteczności systemu. Rozwiązanie to zapewniło stabilny odczyt danych z identyfikatorów RFID, eliminując wpływ metalowych elementów urządzenia. Wciąż trwają prace nad optymalizacją położenia anteny w celu uzyskania najlepszej wydajności systemu. W szczególności analizowane są różne kąty obrotu anteny oraz jej dokładne umiejscowienie względem płyty grzewczej. Dotychczasowe zmiany w konstrukcji potwierdziły, że umieszczenie anteny na zewnątrz jest kluczowe dla działania systemu. Kolejne eksperymenty mają na celu dalszą poprawę parametrów pracy i wyeliminowanie ewentualnych zakłóceń transmisji.
6. Podsumowanie
W artykule przedstawiono projekt i wstępne sprawdzenie poprawności działania wersji demonstracyjnej systemu żelazka zintegrowaną z technologią RFID, które stanowi część koncepcji IoT in Textile Industry. Głównym celem projektu było stworzenie systemu automatycznej identyfikacji tkanin oraz dostosowania parametrów prasowania na podstawie informacji zapisanych w tagach RFID. W artykule omówiono techniczne aspekty konstrukcji urządzenia, w tym budowę płytki PCB, integrację modułu sterowania temperaturą oraz rozwiązania mające na celu eliminację zakłóceń elektromagnetycznych.
Przeprowadzone testy potwierdziły skuteczność zastosowanych rozwiązań w zakresie odczytu danych i sterowania temperaturą. Opracowany identyfikator przechowuje w pamięci wyłącznie wartość temperatury prasowania. Przyszłe gene-
racje prototypu oraz potencjalnych urządzeń produkcyjnych mogą przechowywać dodatkowe informacje, np. ciśnienie pary wodnej czy sugerowana siła nacisku stopy żelazka. Wprowadzenie takich funkcji wymaga opracowania kolejnej generacji demonstratora oraz dalszych badań nad stabilnością odczytu i regulacji temperatury. W artykule podkreślono innowacyjny charakter rozwiązania, które nie tylko zwiększa wygodę użytkowania, ale także minimalizuje ryzyko uszkodzenia tkanin, stanowiąc krok w stronę zautomatyzowanego systemu zarządzania odzieżą w inteligentnych domach.
Bibliografia
1. Lombardi M., Pascale F., Santaniello D., Internet of things: A general overview between architectures, protocols and applications, “Information”, Vol. 12, No. 2, 2021, DOI: 10.3390/info12020087.
2. Jankowski-Mihułowicz P., Pawłowicz B., Kołcz M., Węglarski M., Identification Efficiency in RFIDtex Enabled Washing Machine, “IEEE Access”, Vol. 11, 2023, 103814–103829, DOI: 10.1109/ACCESS.2023.3317510.
3. Ojuroye O., Torah R., Beeby S., Wilde A., Smart textiles for smart home control and enriching future wireless sensor network data, [In:] Sensors for everyday life: Healthcare settings, SSMI, Vol. 22, 2017, 159–183, DOI: 10.1007/978-3-319-47319-2_9.
4. Pawłowicz B., Kołcz M., Jankowski-Mihułowicz P., The Idea of RFIDtex Transponders Utilization in Household Appliances on the Example of a Washing Machine Demonstrator, “Energies”, Vol. 15, No. 7, 2022, DOI: 10.3390/en15072639.
5. Hubacz M., Pawłowicz B., Salach M., Trybus B., Kołcz S., Model urządzenia piorącego wykorzystującego tekstroniczne transpondery RFID, „Pomiary Automatyka Robotyka”, Vol. 26, No. 4, 2022, 69–77, DOI: 10.14313/PAR_246/69.
6. Shen B., Ding X., Wang Y., Ren S., RFID-embedded smart washing machine systems in the big data era: Value creation in fashion supply chain, {In:] Fashion supply chain management in Asia: Concepts, models, and cases, SSFB, 2019, 99–113, DOI: 10.1007/978-981-13-2294-5_7.
8. Kabachinski J., An introduction to RFID, “Biomedical Instrumentation & Technology”, Vol. 39, No. 2, 2005, 131–134.
9. Pop ova I., Abdullina E., Danilov I., Marusin A., Marusin A., Ruchkina I., Shemyakin A., Application of the RFID technology in logistics, “Transportation Research Procedia”, Vol. 57, 2021, 452–462, DOI: 10.1016/j.trpro.2021.09.072.
10. Mašek J., Kolarovszki P., Čamaj J., Application of RFID technology in railway transport services and logistics chains, “Procedia Engineering”, Vol. 134, 2016, 231–236, DOI: 10.1016/j.proeng.2016.01.064.
11. Fescioglu-Unver N., Choi S.H., Sheen D., Kumara S., RFID in production and service systems: Technology, applications and issues, “Information Systems Frontiers”, Vol. 17, 2015, 1369–1380, DOI: 10.1007/s10796-014-9518-1.
12. Chawla V., Ha D.S., An overview of passive RFID, “IEEE Communications Magazine”, Vol. 45, No. 9, 2007, 11–17, DOI: 10.1109/MCOM.2007.4342873.
13. Lotlikar T., Kankapurkar R., Parekar A., Mohite A., Comparative study of Barcode, QR-code and RFID System, “International Journal of Computer Technology and Applications”, Vol. 4, No. 5, 2013.
14. Rambausek L., Textronics: definition, development and characterization of fibrous organic field effect transistors, Doctoral dissertation, Ghent University, 2014.
15. Ramaiah G.B., Theoretical analysis on applications aspects of smart materials and Internet of Things (IoT) in textile technology, “Materials Today: Proceedings”, Vol. 45, Part 6, 2021, 4633–4638. DOI: 10.1016/j.matpr.2021.01.023.
Automatic Temperature Control System in the Iron Based on RFID Technology
Abstract: The article showcases an innovative design for an RFID-integrated iron, which is part of the broader concept of the Internet of Textile Things (IoTT). The goal of the project was to develop a device capable of automatically reading information from RFID tags sewn into fabrics and dynamically adjusting the ironing temperature according to the type of fabric. The paper describes the design of the device, including the PCB design, the heating power control circuit and the solutions used to minimize electromagnetic interference.
Adiunkt w Katedrze Systemów Elektronicznych i Telekomunikacyjnych Wydziału Elektrotechniki i Informatyki Politechniki Rzeszowskiej. Doktorat w dyscyplinie telekomunikacja uzyskał na Wydziale Elektrotechniki, Automatyki, Informatyki i Elektroniki AGH w Krakowie w 2012 r. Jego główne badania dotyczą systemów identyfikacji bezstykowej RFID i ich zastosowań.
inż. Nikita Bailiuk
n.bailiuk@prz.edu.pl
ORCID: 0009-0008-1265-0437
Absolwent Wydziału Elektrotechniki i Informatyki Politechniki Rzeszowskiej na kierunku Elektronika i telekomunikacja. Obecnie pracownik inżynieryjno-techniczny w Laboratorium zintegrowanych mikro- i nanotechnologii elektronicznych HYBRID przy Zakładzie Sytemów Elektronicznych i Telekomunikacyjnych. Wśród głównych zainteresowań znajdują się systemy wbudowane, elektronika i prototypowanie oraz druk 3D.
mgr inż. Paweł Wróbel pawelwr2016@gmail.com
ORCID: 0009-0000-9581-8451
W 2023 r. uzyskał tytuł inżyniera na kierunku Elektronika i telekomunikacja – specjalność telekomunikacja na Politechnice Rzeszowskiej. Kolejnym etapem było ukończenie studiów magisterskich – specjalność systemy elektroniczne. W 2024 r. pracował w firmie Elmak w Rzeszowie jako operator działu montażu automatycznego SMD, obsługując urządzenia do montażu SMD i sitodruku. Od 2025 r. jest serwisantem/instalatorem systemów zabezpieczeń w firmie Neotronik w Lublinie. Jego zainteresowania to elektronika oraz jej serwis, branża IT – systemy niskoprądowe, tworzenie prototypów układów i urządzeń elektronicznych oraz montaż i edycja filmów.
mgr inż. Marcin Goral m.goral@prz.edu.pl
ORCID: 0009-0004-1723-2454
Absolwent Wydziału Elektrotechniki i Informatyki Politechniki Rzeszowskiej kierunek Automatyka i Robotyka. Obecnie asystent w Katedrze Informatyki i Automatyki Politechniki Rzeszowskiej. Wśród głównych zainteresowań znajduje się robotyka, mechatronika, elektronika oraz druk 3D.
Destabilizacja biosensorów na podstawie zmian impulsu elektromagnetycznego i absorpcji
Aleksandra Kłos-Witkowska, Vasyl Martsenyuk
Uniwersytet Bielsko-Bialski, Wydział Budowy Maszyn i Informatyki, Katedra Informatyki i Automatyki, ul. Willowa 2, 43-309 Bielsko-Biała
Streszczenie: Podczas realizacji pracy, za pomocą specjalnie skonstruowanego układu pomiarowego, zbadano utratę stabilności komponenta warstw receptorowych biosensorów na podstawie zmian kształtu impulsu elektromagnetycznego oraz współczynnika absorpcji. Przeprowadzone badania wykazały zmiany w kształcie impulsu i jego amplitudzie po przejściu przez badane substancje. Zmiany te zależały od rodzaju substancji oraz częstotliwości impulsu i pola elektromagnetycznego. Wykazano nieznaczne różnice w kształcie impulsu po przejściu przez badaną substancję – dla różnych roztworów wodnych Albuminy Wołowej (świeżym oraz dwumiesięcznym). Wyznaczono współczynniki absorpcji dla roztworu jednodniowego oraz dla roztworu mającego 53, 58, 60, 63, 65 dni. Przeprowadzone badania nad zmianami konformacyjnymi białka, jakie zachodzą z upływem czasu, wykazały możliwe zmiany strukturalne jako wynik procesów denaturacji i agregacji.
Słowa kluczowe: biosensor, BSA, stabilność, pole elektromagnetyczne, impuls
1. Wprowadzenie
W ostatnim czasie obserwujemy wzmożone zainteresowanie biosensorami ze względu na uniwersalność ich zastosowania i precyzję działania. Biosensory powszechnie stosowane są w diagnostyce medycznej [1], między innymi do pomiaru glukozy [2, 3] czy wykonywania testów w celu monitorowania stanu zdrowia [4], w przemyśle spożywczym do analizy świeżości produktów [5, 6], w ochronie środowiska do monitorowania zanieczyszczeń [7, 8]. Prace nad biosensorami rozwijają się równolegle w dwóch nurtach: teoretycznym przez tworzenie modeli matematycznych [9, 10] i eksperymentalnym [11–13]. Kluczowym elementem konstrukcji biosensorów są warstwy receptorowe, których zadaniem jest detekcja badanego analitu. Oddziaływanie analitu z warstwą receptorową jest podstawą precyzji pomiarów. Na przestrzeni kilkunastu lat obserwuje się wzmożone zainteresowanie biosensorami zarówno przez grupy badawcze, na co wskazuje wzrastająca liczba publikacji w bazach naukowych Web of Science czy Scopus (np. Web of Science liczba publikacji 2010 r. to 2980, zaś w 2024 r. już 7243), jak i wśród przedstawicieli przemysłu, którzy w związku z rosnącymi możliwościami detekcyjnymi urządzeń liczą na potencjalne zyski finansowe. Widać zatem, że temat jest aktualny.
Autor korespondujący:
Aleksandra Kłos-Witkowska, aklos@ubb.edu.pl
Artykuł recenzowany nadesłany 05.06.2025 r., przyjęty do druku 04.09.2025 r.
Stabilność warstw receptorowych, a w szczególności ich komponentów, jest niezwykle istotna ze względu na niezawodność biosensorów i precyzję ich działania. Wszelkiego rodzaju zmiany strukturalne w komponencie biosensora, a tym samym w warstwie receptorowej mogą być przyczyną obniżenia skuteczności detekcji oraz zafałszowania wyników pomiarowych, dlatego też aktywnie prowadzone są badania nad stabilnością tych warstw i ich komponentów [14]. Z tego względu niezwykle ważne jest znalezienie skutecznych metod monitorowania tych zmian i zapobiegania im. W prezentowanej pracy podjęto próbę analizy utraty stabilności komponenta warstwy receptorowej, jakim jest Albumina Surowicy Wołowej (BSA) przez zmianę impulsu elektromagnetycznego oraz współczynnika absorpcji. Badane białko jest powszechnie stosowane jako materiał sieciujący w warstwach receptorowych biosensorów. Proces starzenia się badanej proteiny oraz ich wpływ na sygnały elektromagnetyczne może dostarczyć cennych informacji na temat stabilności warstw i może przełożyć się na zastosowanie w konstrukcji biosensorów.
W prezentowanej pracy zaproponowano niestandardową metodologię bazującą na analizie kształtu impulsu elektromagnetycznego oraz współczynnika absorpcji, co pozwala na śledzenie zmian denaturacyjnych oraz agregacyjnych białka. Przeprowadzone badania dostarczają nowych informacji na temat sposobu monitorowania stabilności komponenta warstw receptorowych, jakim jest BSA. Otrzymane wyniki mogą być wykorzystane do opracowania nowej generacji biosensorów. Celem prezentowanej pracy jest zbadanie zmian zachodzących w strukturze komponenta matryc biosensora (BSA) na podstawie analizy odpowiedzi badanego układu na aplikowane pole elektromagnetyczne. Przeprowadzone badania skoncentrowały się na: (I) określeniu wpływu różnych częstotliwości aplikowanego pola i różnych kształtów impulsu (sinus, prostokąt) na badaną proteinę,
(II) identyfikacji zmian konformacyjnych zachodzących wraz z upływem czasu, (III) ocenę przydatności metody do śledzenia zmian w warstwach receptorowych biosensorów.
Kolejne rozdziały prezentowanego artykułu zawierają szczegółowy opis eksperymentu, wyniki badań oraz ich analizę i interpretację pod katem stabilności białka stosowanego w warstwach receptorowych biosensorów.
2. Materiał i metoda
Do badań wpływu pola elektromagnetycznego na materię użyto specjalnie skonstruowanego stanowiska pomiarowego składającego się z: generatora WON AG GS1F, oscyloskopu XDS3102A, sondy pomiarowej wraz ze specjalnym stojakiem. Badania zostały zaprojektowane i wykonane w trzech etapach: (I) Zbadanie zmian w kształcie i amplitudzie impulsu po przejściu przez: wodę, powietrze, roztwór wodny Albuminy Wołowej (BSA) (2mg/ml) (BSA 1-dniowe), roztwór wodny Albuminy Wołowej (BSA) (2 mg/ml) roztwór dwumiesięczny (BSA 2-miesięczne). Badania wykonano dla trzydziestu pięciu częstotliwości (0,1; 0,2; 0,3; 0,35; 0,4; 0,5; 0,6; 0,7; 0,8; 0,9; 1; 1,1; 1,2; 1,3; 1,4; 1,5; 1,6; 1,7; 1,8; 1,9; 2; 2,1; 2,2; 2,5; 3; 3,5; 4; 4,3; 4,4; 4,5; 4,6; 4,7; 4,8; 4,9; 5 MHz) dokonując aplikacji pola poprzez impulsy: sinusoidalny i prostokątny. Celem tego etapu było zbadanie podatności substancji na pole, określenie różnic impulsu po przejściu przez badane substancji na postawie zmiany jego kształtu i amplitudy. Określenie czy możliwe jest zastosowanie tego typu badań do określenia zmian strukturalnych w badanym roztworze na podstawie zmian w kształcie widma (II) Badanie efektu stabilności badanego roztworu białkowego. (Badanie zmian strukturalnych zachodzących w roztworze wraz z czasem. Spośród badanych częstotliwości wybrano te których kształt był optymalny a sygnał czysty (1, 2, 5 MHz), ale skoncentrowano się na efekcie stabilności badanego białka, która zmieniała się wraz z czasem. Badania wykonano na dla roztworów wodnych Albuminy Wołowej (2 mg/ml) dla roztworów jednodniowego (BSA_1d), dla roztworu mającego 53 dni (BSA_53d); 58 dni (BSA_58d), 60 dni( BSA_60d), 63 dni (BSA_63d), 65 dni (BSA_65d). Badania wykonano w trzech seriach pomiarowych, aby wyeliminować błędy przypadkowe. W badaniach wykorzystano Albuminę Wołową firmy Sigma oraz wodę demineralizowaną. (III) Dokonano analizy zachodzących zmian w roztworze na podstawie wyznaczenia współczynników absorpcji. Zdefiniowano wnioski.
Osiągnięciem i zaletą pracy jest stosowanie niestandardowej metody do śledzenia utraty stabilności proteiny wraz z czasem. Proteiny powszechnie wykorzystywanej do sieciowania warstw receptorowych w biosensorze. W tym celu zaprojektowano i stworzono specjalny układ pomiarowy. Dzięki przeprowadzonym badaniom stworzono dużą bazę danych 1818 widm, którą przeanalizowano i wyciągnięto wnioski na temat dystrybucji pola elektromagnetycznego po przejściu przez próbkę oraz możliwych odpowiedzi układu zmieniającego się wraz z czasem. Najciekawszym elementem pracy jest śledzenie zmian konformacyjnych w białku wykorzystywanym do sieciowania w warstwach receptorowych biosensorów na podstawie wyznaczonych współczynników absorpcji.
3. Rezultaty i dyskusja
Na Rysunku 1 przedstawiono przykładowe widmo z oscyloskopu dla 10 000 punktów pomiarowych (próbkowanie sygnału następowało z krokiem 0,02 µs) ukazujące sinusoidalny (Rys. 1a) oraz prostokątny (Rys. 1b), periodyczny przebieg. Na wykresie (Rys. 1a) oznaczono parametr „B”, określany jako wartość międzyszczytowa, której średnia wartość dla całego spektrum została automatycznie pobrana z oscyloskopu. Połowa wartości szczytowej, oznaczona jako „A”, odpowiada amplitudzie, która była następnie stosowana w dalszych analizach. Takie samo oznaczenie dotyczy przebiegu prostokątnego (Rys. 1b).
Kolejne wykresy (Rys. 2) przedstawiają zmiany amplitudy oraz kształtu impulsu dla impulsu sinusoidalnego (Rys. 2b) oraz dla impulsu prostokątnego (Rys. 2d) po przejściu przez roztwór BSA. Zbadano otrzymaną odpowiedź układu na przyłożone pole elektromagnetyczne. Dla porównania umieszczono również sygnały wejściowe sinusoidalne (Rys. 2a) oraz prostokątne (Rys. 2c).
Po przejściu przez roztwór BSA zaobserwowano wyraźne zmiany kształtu i amplitudy sygnału. Dla przypadku sinusoidalnego widać, że sygnał po przejściu przez absorbent jest znacząco osłabiony (do kilku mV), a także zdeformowany, co sugeruje dużą stratę energii. Widoczne drobne zakłócenia w sygnale wyjściowym mogą wskazywać na obecność szumów, nieliniowości lub efektów propagacyjnych. Podobnie w przypadku sygnału prostokątnego, który charakteryzuje się większą zawartością harmonicznych, po przejściu przez badany układ zaobserwowano przebieg znacznie osłabiony oraz znacząco zdeformowany, prawdopodobnie efekt ten jest spowodowany występowaniem efektów dyspersyjnych, związanych z propagacją fal elektromagnetycznych w badanym ośrodku. Nie ulega jednak wątpliwości, że odpowiedź układu charakteryzująca się zaobserwowanymi zmianami w kształcie oraz amplitudzie może być źródłem cennych informacji na temat
Rys. 1. Przykładowy impuls dla sygnału sinusoidalnego (a) i prostokątnego (b)
Fig. 1. Example pulse for a sinusoidal (a) and rectangular (b) signal
(a)
(b)
Rys. 2. Przykładowe zmiany w kształcie sygnału i amplitudzie po przejściu przez roztwór BSA dla częstotliwości 0,4 MHz; (a) sygnał wejściowy sinusoidalny, (b) sygnał wyjściowy sinusoidalny, (c) sygnał wejściowy prostokątny, (d) sygnał wyjściowy prostokątny
Fig. 2. Changes in signal shape and amplitude after passing through a solution of BSA at a frequency of 0.4 MHz; (a) sinusoidal input signal, (b) sinusoidal output signal, (c) rectangular input signal, (d) rectangular output signal
właściwości badanego roztworu. Dlatego też przedstawione dalej efekty analizy pozwolą na dokładną interpretację otrzymanych wyników.
Na kolejnych wykresach przedstawiono zależność względnej amplitudy sygnału A2/A1 (A2 – amplituda wyjściowa; A1 –amplituda wejściowa) dla badanych częstotliwości i aplikowanego sygnału sinusoidalnego (Rys. 3a, Rys. 3b, Rys. 3c) oraz sygnału prostokątnego (Rys. 3d, Rys. 3e, Rys. 3f) i dla wybranych substancji: woda, powietrze, BSA 1-dniowe, BSA 2-miesięczne.
Przeprowadzone badania pozwoliły zaobserwować liczne zależności. Biorąc pod uwagę zależność między wodą i powietrzem dla sygnału sinusoidalnego (Rys. 3a) zaobserwowano wzrost względnej amplitudy sygnału (A2/A1) wraz ze wraz ze wzrostem częstotliwości. Podobną zależność zaobserwowano dla roztworów BSA (Rys. 3b). Na Rys. 3a widać, że woda charakteryzuje się wyraźnie wyższą amplitudą względną niż powietrze. W przypadku sygnału prostokątnego (Rys. 3d), cechującego się większą zawartością harmonicznych można powiedzieć, że różnice między wodą a powietrzem mają bardziej fluktuacyjny charakter. Wyższe wartości A2/A1 dla wody można przypisać lepszemu przenoszeniu fal przez medium o większej gęstości i mniejszej ściśliwości. Natomiast sygnał prostokątny, będący bardziej złożonym przebiegiem, podlega większej dyspersji i tłumieniu. Analizując proces zmiany BSA wraz z czasem (denaturacje i agregacje białka) przez zmianę A2/A1 dla różnych typów impulsów (sygnału sinusoidalnego i prostokątnego) (Rys. 3b i 3e) widać, że, świeży roztwór BSA wykazuje nieco większe wartości A2/A1 niż roztwór dwumiesięczny, co może wskazywać na zmiany właściwości fizykochemicznych podczas przechowywania. Różnice te mogą być konsekwencją zmian w oddziaływaniach van der Waalsa pod wpływem czynników zewnętrznych, takich jak np. temperatura, promieniowanie czy kontakt z innymi substancjami.
Porównując odpowiedzi układów (woda, roztwór) (Rys. 3c i Rys. 3f) zauważono niezwykle subtelne zmiany, bardzo zni-
kome. Zatem możemy przypuszczać, iż główna odpowiedź układu determinowana jest przez medium (w badanym przypadku przez wodę).
Analizując otrzymane zależności można powiedzieć, że zauważalne są wyraźne różnice w amplitudzie sygnału między wodą a powietrzem. Występują też subtelne różnice między roztworami BSA świeżym i BSA dwumiesięcznym oraz nieznaczne różnice między wodą a roztworem. Charakter zmian, jednakowy dla impulsu sinusoidalnego i prostokątnego, aczkolwiek w przypadku impulsu o kształcie prostokąta zauważalne są większe fluktuacje z uwagi na większą zawartość harmonicznych.
Aby dokonać głębszego wglądu we właściwości badanych układów a w szczególności na procesy związane ze zmianą stabilności szkieletu proteinowego na podstawie odpowiedzi na aplikowane pole elektromagnetyczne, wyznaczono współczynniki absorpcji w oparciu o regresję liniową. Biorąc pod uwagę względne zmiany amplitudy sygnału (A2/A1), gdzie A2 – amplituda wyjściowa; A1 – amplituda wejściowa) w funkcji grubości próbki (zmienna objętość) oraz filtrując otrzymaną zależność jako y = ae-ux, (zależność ta jest powszechnie stosowana do wyznaczania współczynników absorpcji [15, 16]) wyznaczono współczynniki absorpcji jako parametr „u” (jego wartość bezwzględną). Sposób wyznaczania współczynników absorpcji przedstawia Rys. 4. Przykładowo dla roztworu BSA i dla porównania dla powietrza. Na wykresie znajduje się także współczynnik R2 mówiący o stopniu dopasowania linii trendu do danych eksperymentalnych. Został on wyznaczony automatycznie podczas dopasowania linii trendu. W dalszej kolejności skupiono się na badaniach procesu starzenia się próbek (utraty stabilności szkieletu proteiny) wraz z czasem przez wyznaczenie współczynników absorpcji. Badania przeprowadzono dla impulsu sinusoidalnego, ponieważ impuls prostokątny wykazywał większe fluktuacje. Spośród badanych częstotliwości wybrano 1, 2 i 5 MHz. Natomiast poszerzono spektrum badanych układów. I tak badania wykonano dla roztworów świeżych (BSA 1-dniowego) oraz dla roztworów po 53,
Aleksandra Kłos-Witkowska, Vasyl Martsenyuk
Rys. 3. Zależność względnej amplitudy sygnału A2/A1 (A2 – amplituda wyjściowa; A1 – amplituda wejściowa) dla badanych częstotliwości i aplikowanego sygnału sinusoidalnego (a, b, c) oraz sygnału prostokątnego (d, e, f) i dla wybranych substancji: woda, powietrze, BSA 1-dniowe, BSA 2-miesięczne
Fig. 3. Relative signal amplitude dependence A2/A1 (A2 – output amplitude; A1 – input amplitude ) for the tested frequencies and applied sinusoidal signal (a, b, c) and rectangular signal (d, e, f) and for selected substances: water, air, 1-day BSA, 2-month BSA
Rys. 4. Względna amplituda sygnału w funkcji grubości próbki. Wyznaczanie współczynników absorpcji dla sygnału sinusoidalnego. Dla przykładu powietrza i BSA
Fig. 4. Relative signal amplitude as a function of sample thickness. Determination of absorption coefficients for sinusoidal. For example, in air and BSA
Rys. 5. Wartości współczynników absorpcji dla roztworów BSA (1, 53, 58, 60, 63, 65) dniowych i częstotliwości 5 MHz
Fig. 5. Absorption coefficient values for BSA solutions (1, 53, 58, 60, 63, 65) days and 5 MHz frequencies
Kłos-Witkowska, Vasyl Martsenyuk
Tab. 1. Wartości współczynników absorpcji dla roztworów BSA (1, 53, 58, 60, 63, 65) dniowych i częstotliwości: 1, 2, 5 MHz
Tab. 1. Absorption coefficient values for BSA solutions (1, 53, 58, 60, 63, 65) days and frequencies: 1, 2, 5 MHz f [MHz]
58, 60, 65 dniach. Wyznaczono współczynniki absorpcji. Otrzymane wyniki przedstawia Rys. 5 oraz Tabela 1. Analizując wyniki przedstawione na rys. 5 widać, że współczynnik absorpcji początkowo wynosi ok. 0,277 dla 1-dniowego roztworu BSA, białko jest w stabilnym, natywnym stanie, więc absorpcja jest niższa. Wraz z upływem czasu (po 53 dniach) białko może ulegać stopniowej denaturacji lub agregacji, co zmienia jej zdolność do absorpcji. Po 58 i 60 dniach obserwujemy spadek absorpcji w porównaniu do wartości z 53 dnia, ale nadal są one wyższe niż dla roztworu 1-dniowego. Sugeruje to możliwą rekonfigurację strukturalną lub częściową sedymentację agregatów. Ponowny wzrost absorpcji po 63–65 dniach może wynikać z dalszej agregacji większych struktur białkowych, które silniej rozpraszają pole elektromagnetyczne. Badane roztwory były roztworami wodnymi (nie były buforowane), zatem możliwe są zmiany pH roztworu wraz z czasem oraz reakcje chemiczne takie jak utlenienie, które również mogą prowadzić do zmian konformacyjnych. Dla 5 MHz fale elektromagnetyczne mają krótszą długość fali, co sprawia, że są bardziej wrażliwe na zmiany struktury cząsteczek w roztworze. Wzrost absorpcji w czasie sugeruje, że zmiany w roztworze BSA skutkują większym tłumieniem fali elektromagnetycznej, co jest zgodne z hipotezą o agregacji i denaturacji białka. Podsumowując, współczynnik absorpcji roztworu BSA zwiększa się wraz z czasem, co sugeruje zmiany strukturalne białka (agregacja, denaturacja, zmiany oddziaływań międzycząsteczkowych). Krótkotrwałe spadki (np. po 58–60 dniach) mogą wskazywać na przejściowe procesy, takie jak restrukturyzacja agregatów. Najwyższą absorpcję odnotowano po 65 dniach, co sugeruje silne zmiany w roztworze.
Dokonując interpretacji danych w Tabeli 1 można wnioskować, że w przypadku niskiej częstotliwości (1 MHz) fale elektromagnetyczne mają większą długość fali i są mniej podatne na rozpraszanie na małych strukturach, co może prowadzić do nieregularnych fluktuacji absorpcji w wyniku procesów agregacji i rozpadu struktur białkowych. W zakresie 2 MHz mają większą czułość na zmiany w roztworze niż przy 1 MHz, co może tłumaczyć silniejsze oscylacje. Może to być efekt dynamicznych zmian konformacyjnych roztworów białkowych BSA, które początkowo tworzą agregaty, a następnie ulegają fragmentacji. Wyższa częstotliwość (5 MHz) oznacza krótszą długość fali, przez co fale elektromagnetyczne są bardziej podatne na rozpraszanie i absorpcję w wyniku obecności cząsteczek białka. Wzrost absorpcji w czasie sugeruje, że BSA przechodzi stopniowe zmiany konformacyjne, prowadzące do zwiększonego rozpraszania energii. Wyznaczone współczynniki absorpcji pozwoliły na ocenę stopnia zmian konformacyjnych zachodzących w czasie w badanych roztworach. Początkowa wartość współczynnika absorpcji dla roztworu świeżego wynosiła 0,277, co wskazuje na stabilność struktury białkowej. Jednak wraz z wydłużeniem czasu przechowywania zaobserwowano wyraźny wzrost absorpcji (do 0,3 po 65 dniach), co może sugerować zwiększoną agregację białka oraz zmiany w strukturze drugorzędowej. Skokowa zmiana absorpcji między 53 a 58 dniem może świadczyć o zachodzeniu pro-
cesów przejściowych, np. reorganizacji agregatów białkowych lub interakcji międzycząsteczkowych.
4. Podsumowanie
Przeprowadzone badania wykazały zmiany w kształcie impulsu elektromagnetycznego i jego amplitudzie po przejściu przez badane substancje. Zmiany te zależały od rodzaju substancji oraz zaaplikowanej częstotliwości. Dla impulsu prostokątnego zauważono większe fluktuacje w widmie niż dla impulsu sinusoidalnego, najprawdopodobniej ze względu na większa zawartość harmonicznych. Zauważono różnice w kształcie impulsu między BSA jednodniowym a dwumiesięcznym. Przeprowadzone badania nad możliwymi zmianami konformacyjnymi białka zachodzące wraz z czasem przez wyznaczenie współczynników absorpcji, wykazały możliwe zmiany strukturalne jako wynik procesów: denaturacji i agregacji. Otrzymane wyniki są istotne w kontekście stosowania BSA jako komponentu matryc w biosensorach, gdzie stabilność strukturalna białka może wpływać na skuteczność detekcji analitu. Jednocześnie wykazano, że przez analizę impulsu pola elektromagnetycznego również można wnioskować na temat możliwych zmian strukturalnych proteiny. Dalsze badania powinny skupić się na mechanizmach odpowiedzialnych za zmiany strukturalne oraz ich wpływie na funkcjonalność biosensorów.
Bibliografia
1. Chandra B., Yuming J., Jehad D., Simil T., Nimer W., Yongjiu L., Mrinal Kanti H., Xiangming X., Erol A.H., Omar M., Osman M.B., Antibody-functionalized MXene-based electrochemical biosensor for point-of-care detection of vitamin D deficiency, “Communications Materials”, Vol. 6, 2025, DOI: 10.1038/s43246-025-00756-9.
2. Adib M., Barrett C., O’Sullivan S., Flynn A., McFadden M., Kennedy E., O’Riordan A., In situ pH-Controlled electrochemical sensors for glucose and pH detection in calf saliva, “Biosensors and Bioelectronics”, Vol. 275, 2025, DOI: 10.1016/j.bios.2025.117234.
3. Bakar A.S.A.A., Hatta S.F.W.M., Soin N., Nouxman M.H.A., Rezali F.A.M., Daut M.H.M., High gain transimpedance amplification for wireless glucose monitoring in a wearable health sensor system, “Analog Integrated Circuits and Signal Processing”, Vol. 120, 2024, 141–153, DOI: 10.1007/s10470-024-02276-x.
4. Khandelwal D., Bhattacharya A., Kumari V., Ranjan K., Mishra V., Leveraging nanomaterials for ultrasensitive biosensors in early cancer detection: a review, “Journal of Materials Chemistry B”, Vol. 13, No. 3, 2025, 802–820, DOI: 10.1039/D4TB02107J.
6. Kumar A., Kulshreshtha S., Shrivastava A., Saini A., Biosensors for Food Spoilage Detection: A Comprehensive Review of Current Advances, “Journal of Food Chemistry & Nanotechnology”, 2024, 73–82, DOI: 10.17756/jfcn.2024-s1-010.
7. Williams A., Aguilar M., Arachchillage P., Chandra S., Rangan S., Gupta S., Vivancos J., Biosensors for Public Health and Environmental Monitoring: The Case for Sustainable Biosensing, “ACS Sustainable Chemistry & Engineering”, Vol. 12, No. 28, 2024, 10296–10312, DOI: 10.1021/acssuschemeng.3c06112.
9. Martsenyuk V., Klos-Witkowska A., Sverstiuk A., Stability Investigation of Biosensor Model Based on Finite Lattice Difference Equations, Springer Proceedings in Mathematics and Statistics, PROMS, Vol. 312, 2020, 297–321, DOI: 10.1007/978-3-030-35502-9_13.
10. Martsenyuk V., Klos-Witkowska A., Sverstiuk A., Bahrii-Zaiats O., Bernas M., Witos K., Intelligent Big Data System Based on Scientific Machine Learning of Cyber-physical Systems of Medical and Biological Processes, CMIS, 2021, 34–48.
11. Martsenyuk V., Soldatkin O., Klos-Witkowska A., Sverstiuk A., Berketa K., Operational stability study of lactate biosensors: modeling, parameter identification, and stability analysis, “Frontiers in Bioengineering and Biotechnology”, Vol. 12, 2024, DOI: 10.3389/fbioe.2024.1385459.
12. Kłos-Witkowska A., Martsenyuk V., Stabilność komponenta sieciującego warstwę receptorową biosensora po dodaniu nanocząstek złota, „Pomiary Automatyka Robotyka”, R. 25, Nr 1, 2021, 49–52, DOI: 10.14313/PAR_239/49.
13. Kłos-Witkowska A., Martsenyuk V., Badania wpływu promieniowania elektromagnetycznego na komponenty matryc biosensora, „Pomiary Automatyka Robotyka”, R. 27, Nr 4, 2023, 57–63, DOI: 10.14313/PAR_250/57.
14. Klos-Witkowska A., Influence of fractional electromagnetic radiation doses on biosensor matrix component stability, “Acta Physica Polonica A”, Vol. 133, No. 1, 2018, 101–104, DOI: 10.12693/APhysPolA.133.101.
15. Polk C., Postow E., Handbook of Biological Effects of Electromagnetic Fields, 2nd Edition, CRC Press 1995.
16. Kłos-Witkowska A., Kajstura K., Effect of UV radiation applied fractionally or continuously on stability of biosensor receptor layer component, “Acta Physica Polonica A”, Vol. 138, No. 6, 2020, 781–786.
Destabilisation of Biosensors Based on Changes in Electromagnetic Pulse and Absorption
Abstract: During the work, a specially constructed measuring system was used to examine the loss of stability of the receptor layer components of biosensors based on changes in the shape of the electromagnetic pulse and the absorption coefficient. The tests showed changes in the shape and amplitude of the pulse after it passed through the tested substances. These changes depended on the type of substance and the frequency of the pulse and electromagnetic field. Slight differences in the pulse shape were observed after passing through the tested substances (for different aqueous solutions of bovine albumin – fresh and two months old). Absorption coefficients were determined for a one-day-old solution and for solutions aged 53, 58, 60, 63, 65 days. Studies on conformational changes in the protein over time showed possible structural changes as a result of denaturation and aggregation processes.
Adiunkt w Katedrze Informatyki i Automatyki na Wydziale Budowy Maszyn i Informatyki, Uniwersytet Bielsko-Bialski w Bielsku-Białej. Zainteresowania naukowe: sensory i biosensory.
prof. dr hab. Vasyl Martsenyuk vmartsenyuk@ubb.edu.pl
ORCID: 0000-0001-5622-1038
Profesor w Katedrze Informatyki i Automatyki na Wydziale Budowy Maszyn i Informatyki, Uniwersytet Bielsko-Bialski w Bielsku-Białej. Zainteresowania naukowe: biosensor, systemy dynamiczne, informatyka medyczna.
Wykorzystanie termografii w diagnostyce zabiegów
fizykalnych u koni wyścigowych
Maria Soroko-Dubrovina, Karolina Śniegucka, Karolina Nawrot
Uniwersytet Przyrodniczy we Wrocławiu, Wydział Biologii i Hodowli Zwierząt, Instytut Hodowli Zwierząt, ul. Chełmońskiego 38C, 51-630 Wrocław
Paulina Zielińska
Uniwersytet Przyrodniczy we Wrocławiu, Wydział Medycyny Weterynaryjnej, Katedra i Klinika Chirurgii, pl. Grunwaldzki 51, 50-366 Wrocław
Magdalena Drewka
Politechnika Bydgoska im. Jana i Jędrzeja Śniadeckich, Wydział Hodowli i Biologii Zwierząt, ul. Mazowiecka 28, 85-084 Bydgoszcz
Streszczenie: Celem pracy była analiza możliwości zastosowania termografii jako narzędzia do oceny efektów wybranych narzędzi fizykalnych stosowanych u klinicznie zdrowych koni. W pracy omówiono wykorzystanie termografii do oceny reakcji fizjologicznych tkanek koni poddanych laseroterapii, pozaustrojowej fali uderzeniowej oraz magnetoterapii. Na podstawie przeglądu literatury i wyników badań klinicznych wykazano, że termografia pozwala na obiektywną ocenę efektów terapii oraz może służyć jako wskaźnik bezpieczeństwa zabiegów stosowanych profilaktycznie u klinicznie zdrowych koni. Rozwój i standaryzacja zastosowania termografii w ocenie efektów zabiegów fizykalnych może przyczynić się do ujednolicenia protokołów terapeutycznych, poprawy skuteczności terapii oraz podniesienia standardów opieki nad końmi.
Słowa kluczowe: termografia, konie, zabiegi fizykalne, fizjoterapia, diagnostyka
1. Wprowadzenie
Termografia jest nieinwazyjną i bezkontaktową metodą diagnostyczną, badającą rozkład temperatury powierzchni ciała przez rejestrację promieniowania podczerwonego emitowanego z powierzchni ciała [13]. Wynik badania przedstawiany jest w postaci termogramu – obrazu, w którym poszczególnym kolorom przypisane są konkretne wartości temperatury [2017]. Zmierzona temperatura powierzchni ciała jest ściśle związana z przewodnictwem cieplnym powierzchownych sieci naczyń krwionośnych, ilością tkanki podskórnej, aktywnością metaboliczną masy mięśniowej czy gęstością okrywy włosowej [10, 24, 26]. Na wynik pomiaru mają również istotny wpływ czynniki środowiskowe, w tym temperatura otoczenia, wilgotność oraz ruch powietrza [23, 26, 37].
Wykazano, że wzorzec rozkładu temperatury powierzchni ciała jest powtarzalny u zdrowych koni, co pozwoliło na opracowanie map referencyjnych dla poszczególnych okolic ciała w stanie spoczynku [34, 33, 28]. Rejony ciała o dobrze rozwiniętej i intensywnie unaczynionej masie mięśniowej, takie jak okolica szyi, grzbietu, zadu oraz klatki piersiowej
Autor korespondujący:
Maria Soroko-Dubrovina, maria.soroko@upwr.edu.pl
Artykuł recenzowany nadesłany 10.06.2025 r., przyjęty do druku 18.08.2025 r.
wykazują istotnie wyższe wartości temperatury powierzchni ciała niż obszary charakteryzujące się mniejszym lub całkowitym brakiem udziału tkanki mięśniowej, jak w przypadku dolnych partii kończyn (Rys. 1) [24]. W długofalowych badaniach [4] analizowano rozkład temperatury powierzchni ciała koni w spoczynku, zarówno u osobników dorosłych użytkowanych w ośrodku jeździeckim, jak i u młodych klaczy. Pomiary wykonano w różnych porach roku – wiosną, jesienią oraz zimą. U koni dorosłych najwyższe temperatury (27–29 °C) odnotowano w okolicach klatki piersiowej, szyi i zadu, natomiast najniższe (22–23 °C) w rejonach śródręcza i śródstopia. Podobny schemat rozkładu temperatury zaobserwowano u młodych klaczy w warunkach zimowych – najwyższe wartości występowały w okolicy szyi, klatki piersiowej i zadu (15–21 °C), niższe w okolicy grzbietu i zadu (12–16 °C), a najniższe na dalszych partiach kończyn (9–15 °C) [3]. Liczne badania wykazały symetryczność rozkładu temperatury powierzchni ciała, co czyni tę metodę szczególnie przydatną do wykrywania zmian patologicznych w medycynie weterynaryjnej [3, 5, 18]. Przyjmuje się, że różnice temperatury przekraczające 1 °C między analogicznymi regionami ciała mogą wskazywać na toczący się proces zapalny [25]. Wykorzystano ten próg różnicy temperatur do diagnozy jednostronnych schorzeń dolnych partii kończyn, obejmujących m.in. ropne zapalenie tworzywa kopytowego [11]; ochwat [34], zapalenie ścięgna [1, 25], zwyrodnienia stawów (Rys. 2) [1, 38], zapalenie okostnej kości śródręcza III [38]. W przypadku jednostek chorobowych grzbietu termografia znalazła zastosowanie w diagnozowaniu chorób nerwowo-mięśniowych odcinka piersiowo-lędźwiowego kręgosłupa [22], zapalenia wyrostków kolczystych (Rys. 3) [36] oraz zapalenia stawów
międzykręgowych w odcinku piersiowo-lędźwiowym kręgosłupa [6, 35].
W ostatnim czasie termografia znajduje także coraz szersze zastosowanie w fizjoterapii weterynaryjnej koni, umożliwiając ocenę odpowiedzi organizmu na różne formy terapii – takie jak laseroterapia wysokoenergetyczna HILT (ang. High-Intensity Laser Therapy), terapia pozaustrojowa fala uderzeniowa ESWT (ang. Extracorporeal Shock Wave Therapy), magnetoterapia pulsacyjna PEMF (ang. Pulsed Electromagnetic Field Therapy), krioterapia czy terapia manualna [8]. Termografia pozwala monitorować zmiany przepływu krwi i procesy metaboliczne w odpowiedzi na zastosowane bodźce terapeutyczne, co może być wskaźnikiem skuteczności lub bezpieczeństwa danej procedury [29]. Wobec ograniczonej dostępności danych dotyczących wpływu zabiegów fizykalnych na organizm klinicznie zdrowych koni oraz braku jednoznacznych informacji o doborze parametrów zabiegowych i ich bezpieczeństwa, celem
Rys. 1. Termogram prawej strony sylwetki konia
Fig. 1. Thermogram of the right side of the horse’s body
pracy była analiza możliwości zastosowania termografii jako narzędzia do oceny efektów wybranych narzędzi fizykalnych stosowanych u klinicznie zdrowych koni. W pracy odniesiono się do przeglądu literatury oraz przedstawiono wyniki własnych badań termograficznych dotyczących reakcji organizmu koni na różne formy terapii fizykalnej. W przedstawionych badaniach własnych wykorzystano kamerę termowizyjną VarioCAM hr (InfraTec, Dresden, Niemcy) wyposażoną w niechłodzony detektor mikrobolometryczny (matryca 640 × 480 px, zakres spektralny 7,5–14 µm), o czułości temperaturowej 0,02 °C i dokładności pomiarowej ±1 °C. W przedsądowych pracach termogramy wykonywano z odległości 1–2 m, pod kątem ok. 45° względem powierzchni ciała konia przy założeniu współczynnika emisyjności ε = 1,00 [9]. Wszystkie pomiary przeprowadzono w zamkniętym pomieszczeniu o stabilnej temperaturze otoczenia, bez wpływu promieniowania słonecznego, przeciągów ani ruchu powietrza. Przed każdym pomiarem
Rys. 2. Termogram dystalnych partii prawej od strony doczaszkowej. Przykład zapalenia w obrębie stawu pęcinowego prawej kończyny piersiowej
Fig. 2. Thermogram of the distal part of the forelimbs from the dorsal view. Example of inflammation in the fetlock joint of the right forelimb
Maria
konie przebywały w boksie przez minimum 20 minut w celu adaptacji do warunków środowiskowych i ograniczenia wpływu czynników zewnętrznych. Badane konie były w spoczynku i nie były czyszczone w obrębie badanego obszaru bezpośrednio przed badaniem [24].
2. Wykorzystanie termografii w fizjoterapii
2.1. Wykorzystanie termografii w ocenie działania HILT
HILT jest dynamicznie rozwijającą się metodą wspomagającą leczenie schorzeń układu ruchu [39]. Jej rosnąca popularność wynika z nieinwazyjnego charakteru oraz potencjalnych efektów przeciwbólowych, przeciwzapalnych i regeneracyjnych. Działanie HILT opiera się przede wszystkim na efekcie fototermicznym, gdzie pochłonięta przez tkanki energia świetlna przekształcana jest w ciepło, co prowadzi do lokalnego podniesienia temperatury. Skuteczność terapeutyczna HILT zależy zarówno od parametrów technicznych wiązki laserowej (takich jak długość fali, moc i dawka energii), jak i od właściwości biologicznych naświetlanego obszaru. Kluczową rolę odgrywają struktury zawierające chromofory – melaninę, hemoglobinę a także wodę, które odpowiadają za absorpcję promieniowania i przekształcenie go w energię cieplną. Proces ten prowadzi do rozszerzenia naczyń krwionośnych, zwiększenia mikrokrążenia, poprawy utlenowania tkanek oraz stymulacji procesów naprawczych. Na skuteczność i bezpieczeństwo zabiegów HILT istotny wpływ ma również obszar poddany zabiegowi oraz cechy skóry w polu zabiegowym, w szczególności jej pigmentacja oraz obecność sierści. Czynniki te mogą znacząco modyfikować stopień penetracji oraz absorpcję energii laserowej, co należy uwzględnić przy indywidualnym doborze parametrów terapii. W badaniach pilotażowych [7] wykorzystano termografię do oceny wpływu HILT na temperaturę powierzchni ciała w okolicy stawu stępu u 16 klinicznie zdrowych koni wyścigowych. Po jednorazowym zabiegu terapii HILT odnotowano statystycznie istotny wzrost temperatury powierzchni stawu z 26,5 °C do 29,5 °C (średnio o 3,0 °C; p < 0,001), co stanowi potwierdzenie efektu fototermicznego tej metody. W kontynuacji niniejszego badania zastosowano termografię w celu oceny wpływu terapii HILT na ścięgno mięśnia zginacza powierzchownego palców
Rys. 3. Termogram okolicy grzbietu od strony dogrzbietowej. Zapalenie wyrostków kolczystych odcinka piersiowego kręgosłupa
Fig. 3. Thermogram of the thoracolumbar spine from the dorsal view. Inflammation of the spinous processes in the thoracic region
kończyny miednicznej. Po zabiegu odnotowano statystycznie istotny wzrost temperatury powierzchni ciała w obrębie badanego obszaru z 21,2 °C do 24,6 °C (średnio o 3,5 °C; p < 0,001), co potwierdziło fototermiczne działanie tej metody na tkanki miękkie [40].
W innej pracy naukowej oceniono wpływ terapii HILT na temperaturę powierzchni ciała w okolicy stawu pęcinowego u koni z pigmentowaną i niepigmentowaną skórą w polu zabiegowym. Badana grupa koni wyścigowych została podzielona na dwie podgrupy: o skórze pigmentowanej (n = 10) i niepigmentowanej (n = 10). Średnia temperatura skóry pigmentowanej po zabiegu HILT wzrosła o 3 °C, natomiast w grupie o skórze niepigmentowanej spadła o 0,2 °C. Porównanie między grupami pod względem zmian temperatury przed i po zabiegu wykazało istotność statystyczną (Z = 3,175; p = 0,001), co może wskazywać na wpływ pigmentacji skóry na odpowiedź termiczną tkanek. Przedstawione rezultaty są pierwszym klinicznym badaniem dokumentującym efekty termiczne zabiegów HILT na zdrowej tkance kończyny u koni w odniesieniu do pigmentacji skóry w polu zabiegowym [41]. W kolejnym badaniu naukowym oceniono fototermiczny efekt terapii HILT na klinicznie zdrową tkankę konia w polu zabiegowym o silnej pigmentacji skóry, które różniło się sposobem jego przygotowania (pole zabiegowe ogolone i nieogolone). Badania przeprowadzono na grupie 20 koni wyścigowych, które podzielono na dwie równe grupy: z ogolonym i nieogolonym polem zabiegowym w okolicy stawu nadgarstkowego kończyny piersiowej. Po jednorazowym zabiegu HILT nie wykazano istotnych statystycznie różnic w średniej temperaturze powierzchni ciała między grupami (33,4 °C vs 32,4 °C; p = 0,246). Natomiast porównanie zmian temperatury powierzchni ciała przed i po zabiegu wykazało, że średni wzrost temperatury był istotnie niższy w grupie koni z ogolonym polem zabiegowym (2,1 °C vs 3,9 °C; p = 0,006), co może wskazywać na wpływ sierści na retencję ciepła. Możliwym wyjaśnieniem niższego wzrostu temperatury skóry ogolonej jest brak warstwy izolującej w postaci sierści oraz powietrza w niej uwięzionego, co prowadzi do zwiększonej utraty ciepła z powierzchni ciała. W przypadku terapii przewlekłych schorzeń, w których pożądane jest głębokie rozgrzanie tkanek, zasadnym może być pozostawienie nieogolonego pola zabiegowego przy jednoczesnym dostosowaniu parametrów zabiegowych związanych z obecnością sierści [42].
W najnowszym badaniu oceniono efekt fototermiczny zabiegu HILT w obrębie stawu skroniowo-żuchwowego u klinicznie zdrowych koni wyścigowych. Celem pracy było określenie wzrostu temperatury powierzchni ciała w laserowanym obszarze po jednorazowym zabiegu oraz ocena bezpieczeństwa terapii. Po zastosowaniu HILT temperatura powierzchni ciała w obrębie stawu wzrosła średnio o 2,0 °C (p < 0,001). Nie odnotowano żadnych negatywnych reakcji ani oznak dyskomfortu u badanych koni, co świadczy o bezpieczeństwie zastosowanego protokołu terapeutycznego. Uzyskane wyniki wskazują, że HILT może być bezpiecznym i skutecznym narzędziem wspierającym terapię dysfunkcji stawu skroniowo-żuchwowego u koni, choć autorzy podkreślają potrzebę dalszych badań klinicznych obejmujących konie z rozpoznanymi zmianami patologicznymi w tym obszarze [29].
Wyniki przedstawionych badań, w których za pomocą termografii potwierdzono efekty termiczne w warunkach klinicznych, co stanowi punkt wyjścia do formułowania zaleceń dotyczących parametrów bezpiecznego stosowania HILT w leczeniu schorzeń ortopedycznych u koni sportowych.
2.2. Wykorzystanie termografii w ocenie
działania ESWT
ESWT jest metodą fizykalną stosowaną w leczeniu schorzeń układu ruchu. Oddziaływanie terapeutyczne fali uderzeniowej wynika z przekazywania energii mechanicznej do tkanek w postaci krótkich impulsów o wysokim ciśnieniu. Działanie biologiczne fali uderzeniowej obejmuje pobudzanie mikrokrążenia, stymulację regeneracji tkanek, zmniejszenie napięcia mięśniowego, działanie przeciwbólowe oraz stymulację syntezy kolagenu. Mimo wielu doniesień o skuteczności tej metody w leczeniu zapalenia mięśnia międzykostnego, ścięgna mięśnia zginacza powierzchownego palców [16], syndromu trzeszczkowego [15], czy degeneracyjnych zapaleń stawów [14] nadal ograniczona jest liczba badań opisujących wpływ fali uderzeniowej na zdrowe tkanki u koni oraz możliwości obiektywnego monitorowania reakcji organizmu na zabieg.
Wykorzystano termografię do termicznej oceny reakcji tkanek miękkich na radialną pozaustrojową falę uderzeniową rESWT (ang. radial Extracorporeal Shock Wave Therapy) w okolicy mięśnia najdłuższego grzbietu. W badaniu z udziałem 24 klinicznie zdrowych koni wyścigowych. Po jednorazowym zabiegu rESWT odnotowano statystycznie istotny wzrost temperatury powierzchni ciała w obszarze zabiegowym – średnio z 31,1 °C przed zabiegiem do 32,4 °C bezpośrednio po zabiegu (średni wzrost: 1,3 °C; p < 0,05). Po 10 minutach temperatura wróciła do poziomu wyjściowego, co może świadczyć o przejściowym efekcie termicznym terapii. Wyniki potwierdzają możliwość zastosowania termografii do nieinwazyjnej oceny fizjologicznej odpowiedzi tkanek na działanie rESWT [31]. W innym badaniu, w którym oceniano działanie skupionej pozaustrojowej fali uderzeniowej fESWT (ang. focused Extracorporeal Shock Wave Therapy) na zdrowe struktury przyczepów ścięgnistych i kości kończyn koni, termografia nie wykazała istotnych różnic temperatury między kończyną poddaną terapii a kontrolną (p > 0,05). Średni współczynnik temperatury między obszarem leczonym a referencyjnym jedną godzinę po terapii wynosił 1,111 ±0,302 i nie różnił się istotnie od wartości wyjściowej. Uzyskane wyniki wskazują, że przy zastosowanych parametrach (2000 impulsów, 0,15 mJ/mm²) fESWT nie wywierała istotnego działania termicznego, a termografia okazała się skutecznym narzędziem do oceny bezpieczeństwa terapii u zdrowych koni [20].
2.3. Wykorzystanie termografii w ocenie
działania PEMF
PEMF (pulsacyjne pole magnetyczne) jest nieinwazyjną metodą fizykoterapeutyczną, mającą na celu stymulację mikro-
krążenia, zmniejszenie bólu, poprawę utlenowania tkanek oraz przyspieszenie procesów regeneracyjnych. Pulsacyjne pole magnetyczne generowane jest z niską częstotliwością (1–30 Hz) i ma niewielką indukcję magnetyczną (zwykle poniżej 100 µT), oddziałując na błony komórkowe, kanały jonowe oraz układ naczyniowy [21]. Z biologicznego punktu widzenia PEMF może oddziaływać na śródbłonek naczyń krwionośnych, sprzyjając procesom angiogenezy, zwiększając perfuzję tkanek i poprawiając metabolizm komórkowy. Efekty te zostały potwierdzone w warunkach laboratoryjnych, m.in. w badaniach in vitro nad namnażaniem się komórek śródbłonka oraz w eksperymentach na zwierzętach laboratoryjnych [32]. W praktyce klinicznej skuteczność PEMF u koni wciąż jest przedmiotem dyskusji – istnieją zarówno doniesienia potwierdzające jego korzystny wpływ na mikrokrążenie, jak i badania, które nie wykazały efektów terapeutycznych.
W badaniu [19] oceniano wpływ 10-dniowej terapii PEMF (50 µT) na temperaturę grzbietu u 20 koni polo. Konie z grupy badawczej były poddane terapii PEMF, a konie z grupy placebo miały nałożony sprzęt do terapii bez jego aktywacji. Pomiary termograficzne dla obu grup wykonano przed oraz 30 minut po zakończeniu sesji. Analiza termogramów nie wykazała istotnych różnic temperatury między grupą badawczą a placebo – w grupie badawczej odnotowano średni wzrost temperatury powierzchni ciała o 0,69 °C. W badaniu zastosowano kamerę VarioCam (InfraTec GmbH) o rozdzielczości temperaturowej 0,08 °C, jednak typowy błąd pomiarowy urządzeń tej klasy wynosi ±1 °C. W związku z tym wzrost temperatury o 0,69 °C mieści się w granicy niepewności pomiaru, co dodatkowo uzasadnia brak istotnych różnic między grupami. Zastosowanie termografii pozwoliło na obiektywną ocenę rozkładu temperatury powierzchni ciała, jednak w tym przypadku nie potwierdziło istotnego wpływu PEMF na temperaturę grzbietu koni, wskazując na ograniczoną przydatność tej metody w detekcji zmian mikrokrążeniowych indukowanych terapią PEMF o niskim natężeniu.
2.4. Wykorzystanie termografii w ocenie działania terapii fizykalnej naczyniowej BEMER
Terapia fizykalna naczyniowa BEMER (ang. physical vascular therapy) stanowi specjalistyczną odmianę PEMF, wykorzystującą unikalny przebieg sygnału elektromagnetycznego w określonym zakresie częstotliwości (8–11 Hz oraz 28–31 Hz) i niskim natężeniu (10–100 µT). System BEMER został zaprojektowany w celu rytmicznej stymulacji mikrokrążenia, a jego działanie polega na poprawie przepływu krwi w naczyniach włosowatych. W badaniach klinicznych na ludziach wykazano, że stosowanie terapii BEMER prowadzi do zwiększenia liczby otwartych kapilar, poprawy dystrybucji tlenu i substancji odżywczych, a także przyspieszenia regeneracji tkanek [12]. Wstępne badania nad zastosowaniem terapii BEMER u klinicznie zdrowych koni również wskazują na jej potencjał. W badaniu [30] przeanalizowano wpływ terapii BEMER na zmiany temperatury powierzchni ciała w obrębie grzbietu oraz górnych partii kończyn piersiowych i miednicznych u koni wyścigowych. Badania przeprowadzono na grupie 20 koni pełnej krwi angielskiej, które podzielono losowo na grupę badawczą i placebo. Pomiary termograficzne wykonano trzykrotnie: przed terapią, bezpośrednio po niej oraz po upływie 15 minut. W grupie badawczej nie odnotowano zmian temperatury powierzchni ciała bezpośrednio po zakończeniu terapii, natomiast 15 minut po zabiegu temperatura powierzchni ciała w rejonie mięśni trójgłowego ramienia i najdłuższego grzbietu pozostała na poziomie wyjściowym (ΔT = 0,01 °C). W grupie placebo, po 15 minutach od zakończenia terapii, odnotowano istotny spadek temperatury powierzchni ciała (ΔT = –0,36 °C), a różnica między grupami była statystycznie istotna (p < 0,01).
Wyniki te sugerują, że terapia BEMER przyczynia się do stabilizacji temperatury powierzchni ciała i może ograniczać straty ciepła po zakończeniu zabiegu. Termografia umożliwiła nieinwazyjną rejestrację odpowiedzi fizjologicznej organizmu na działanie pola magnetycznego, potwierdzając jej przydatność w ocenie efektów terapeutycznych.
W innych badaniach oceniano wpływ 15-minutowej terapii BEMER na mikrokrążenie w dolnych partiach kończyn piersiowych u zdrowych koni wyścigowych. Do analizy wykorzystano pomiary termograficzne oraz ultrasonograficzne wykonywane przed terapią, bezpośrednio po niej oraz po 15 minutach. Badania przeprowadzono na grupie 20 koni pełnej krwi angielskiej, losowo podzielonych na grupę badawczą i placebo. Termografia nie wykazała istotnych zmian temperatury powierzchni ciała w grupie badawczej w żadnym z punktów pomiarowych (ΔT = 0,04 °C), natomiast w grupie placebo po 15 minutach od zakończenia zabiegu odnotowano istotny spadek temperatury powierzchni ciała (ΔT = –0,47 °C; p = 0,03). Różnica między grupami była również statystycznie istotna (p = 0,003), co sugeruje, że terapia BEMER może ograniczać straty ciepła i stabilizować mikrokrążenie w dalszych partiach kończyn. Badanie ultrasonograficzne wykazało istotne rozszerzenie naczyń w grupie badawczej – średnica tętnicy zwiększyła się średnio z 2,25 ±0,47 mm do 2,83 ±0,41 mm (p = 0,002), a średnica żyły z 1,88 ±0,33 mm do 2,42 ±0,41 mm (p = 0,001). W grupie placebo nie odnotowano istotnych zmian. Wyniki te wskazują, że terapia BEMER wpływa korzystnie na parametry hemodynamiczne i może wspomagać mikrokrążenie w obrębie kończyn koni wyścigowych [17].
3. Podsumowanie
Termografia stanowi precyzyjne, nieinwazyjne i wysoce czułe narzędzie diagnostyczne, które z powodzeniem może być stosowane do obiektywnej oceny działania zabiegów fizykalnych u klinicznie zdrowych koni. Jej uzycie pozwala nie tylko na wczesne wykrycie reakcji fizjologicznych tkanek, ale również na ocenę bezpieczeństwa terapii, bez konieczności ich przerywania czy ingerencji w tkanki. U koni sportowych, gdzie kluczowe znaczenie ma szybka regeneracja i prewencja przeciążeń, termografia może pełnić rolę skutecznego narzędzia monitorowania efektów fizykalnych w czasie rzeczywistym. Umożliwia identyfikację nawet subtelnych zmian w mikrokrążeniu, co czyni ją wartościowym wsparciem w optymalizacji postępowania fizjoterapeutycznego.
Rozwój i standaryzacja zastosowania termografii w ocenie działania zabiegów fizykalnych może przyczynić się do ujednolicenia protokołów terapeutycznych, poprawy efektywności leczenia oraz podniesienia standardów opieki nad końmi sportowymi.
Przedstawione w pracy wyniki badań własnych stanowią istotny wkład w ocenę wpływu wybranych zabiegów fizykalnych (HILT, rESWT i PEMF) na organizm klinicznie zdrowych koni z wykorzystaniem termografii. Uzyskane dane pozwalają na wstępną ocenę reakcji fizjologicznych tkanek na działanie bodźców terapeutycznych i mogą służyć jako punkt wyjścia do dalszych badań nad optymalizacją parametrów zabiegowych oraz poprawą bezpieczeństwa terapii stosowanych profilaktycznie w medycynie koni sportowych.
Bibliografia
1. Cetinkaya M.A., Demirutku A., Thermography in the assessment of equine lameness, “Turkish Journal of Veterinary & Animal Sciences”, Vol. 36, No. 1, 2012, 43–48, DOI: 10.3906/vet-1102-791.
2. Ciutacu O., Tanase A., Miclaus I., Digital infrared thermography in assessing soft tissues injuries on sport equines, “Bulletin of University of Agricultural Sciences and Veterinary Medicine Cluj-Napoca. Veterinary Medicine”, Vol. 63, No. 1-2, 2006, 228–233, DOI: 10.15835/buasvmcn-vm:63:1-2:2482.
3. Čebulj-Kadunc N., Frangež R., Kruljc P., Fluctuations of physiological variables during conditioning of Lipizzan fillies before starting under saddle, “Animals”, Vol. 12, No. 7, 2022, DOI: 10.3390/ani12070836.
4. Čebulj-Kadunc N., Frangež R., Žgajnar J., Kruljc P., Cardiac, respiratory and thermoregulation parameters following graded exercises in Lipizzaner horses, “Veterinarski Arhiv”, Vol. 89, No. 1, 2019, 11–23, DOI: 10.24099/vet.arhiv.0338.
5. Čebulj-Kadunc N., Turk A., Kruljc P., Effects of graded exercise load on variations of certain physiological parameters in Lipizzan horses during riding – a pilot study, “Comparative Exercise Physiology”, Vol. 20, No. 2, 2024, DOI: 10.1163/17552559-20230049.
6. Fonseca B.P.A., Alves A.L.G., Nicoletti J.L.M., Thomassian A., Hussni C.A., Mikail S. DVM, Thermography and ultrasonography in back pain diagnosis of equine athletes, “Journal of Equine Veterinary Science”, Vol. 26, No. 11, 2006, 507–516, DOI: 10.1016/j.jevs.2006.09.007.
7. Godlewska M., Soroko M., Zielińska P., Assessment of vein diameter and body surface temperature after high-intensity laser therapy (HILT) on the tarsal joint in healthy horses, “Journal of Equine Veterinary Science”, Vol. 93, 2020, DOI: 10.1016/j.jevs.2020.103198.
8. Godlewska M., Soroko M., Zielińska P., Zastosowanie termografii w praktyce medycyny weterynaryjnej koni, „Medycyna Weterynaryjna”, Vol. 77, No. 3, 2021, 121–126, DOI: 10.21521/mw.6483.
9. Howell K., Dudek K., Soroko M., Thermal camera performance and image analysis repeatability in equine thermography, “Infrared Physics & Technology”, Vol. 110, 2020, DOI: 10.1016/j.infrared.2020.103447.
10. Jørgensen G.H.M., Mejdell C.M., Bøe K.E., Effects of hair coat characteristics on radiant surface temperature in horses, “Journal of Thermal Biology”, Vol. 87, 2020, DOI: 10.1016/j.jtherbio.2019.102474
11. Kim S., Cho G., Evaluation of heat distribution for the diagnosis of the hoof with abscess by infrared thermography in horses, “The Open Agriculture Journal”, Vol. 15, 2021, 48–53, DOI: 10.2174/1874331502115010048.
12. Klopp R.C., Niemer W., Schulz J., Complementary-therapeutic stimulation of deficient autorhythmic arteriolar vasomotion by means of a biorhythmically physical stimulus on the microcirculation and the immune system in 50-yearold rehabilitation patients, “Journal of Complementary and Integrative Medicine”, Vol. 10, 2013, 29–37, DOI: 10.1515/jcim-2013-0034.
13. Lagüela S., Díaz-Vilariño L., Roca D., Infrared thermography: Fundamentals and applications, [In:] Riveiro B., Solla M. (Eds.), Non-Destructive Techniques for the Evaluation of Structures and Infrastructure, 2016, 113–138, London: CRC Press. DOI: 10.1201/b19024-8.
14. McCarrol D., McClure S.R., Extracorporeal shock wave therapy for treatment of osteoarthritis of the tarsometatarsal and distal intertarsal joint of the horse, Proceedings of the 46th Annual Convention of the American Association of Equine Practitioners, 2000, 200–202.
16. Merritt D.K., Extracorporeal shock-wave therapy for equine musculoskeletal disorders, “Compendium on Continuing
Education for the Practicing Veterinarian”, Vol. 25, 2003, 68–75.
17. Nawrot K., Soroko-Dubrovina M., Zielińska P., Dudek K., Howell K., The application of infrared thermography in the assessment of BEMER physical vascular therapy on body surface temperature in racing Thoroughbreds: A preliminary study, “Animals”, Vol. 14, No. 11, 2024, DOI: 10.3390/ani14111538.
18. Prochno H.C., Barussi F.M., Bastos F.Z., Weber S.H., Bechara G.H., Rehan I.F., Michelotto P.V., Infrared thermography applied to monitoring musculoskeletal adaptation to training in Thoroughbred race horses, “Journal of Equine Veterinary Science”, Vol. 87, 2020, DOI: 10.1016/j.jevs.2020.102935.
19. Rindler N., Biermann N.M., Westermann S., Buchner H.H.F., The effect of Pulsed electromagnetic field therapy on surface temperature of horses’ backs, “Wiener Tierärztliche Monatsschrift”, Vol. 101, No. 7, 2014, 137–141.
20. Ringer S.K., Lischer C.J., Ueltschi G., Assessment of scintigraphic and thermographic changes after focused extracorporeal shock wave therapy on the origin of the suspensory ligament and the fourth metatarsal bone in horses without lameness, “American Journal of Veterinary Research”, Vol. 66, No. 10, 2005, 1836–1842, DOI: 10.2460/ajvr.2005.66.1836.
21. Ross C.L., Zhou Y., McCall C.E., Soker S., Criswell T.L., The use of pulsed electromagnetic field to modulate inflammation and improve tissue regeneration: A review, “Bioelectricity”, Vol. 1, No. 4, 2019, 247–259, DOI: 10.1089/bioe.2019.0030.
22. Schweinitz D.G., Thermographic diagnostics in equine back pain, “Veterinary Clinics of North America: Equine Practice”, Vol. 15, No. 1, 1999, 161–177, DOI: 10.1016/S0749-0739(17)30170-0.
23. Satchell G., McGrath M., Dixon J., Pfau T., Weller R., Effects of time of day, ambient temperature and relative humidity on the repeatability of infrared thermographic imaging in horses, “Equine Veterinary Journal”, Vol. 47, No. S48, 2015, 13–14, DOI: 10.1111/evj.12486_30.
24. Soroko-Dubrovina M., Davies Morel M.C.G., Equine thermography in practice (2nd ed.), CABI, 2023.
25. Soroko M., Henklewski R., Filipowski H., Jodkowska E., The effectiveness of thermographic analysis in equine orthopedics, “Journal of Equine Veterinary Science”, Vol. 33, No. 9, 2013, 760–762, DOI: 10.1016/j.jevs.2012.11.009.
26. Soroko M., Howell K., Dudek K., Henklewski R., Zielińska P., The influence of breed, age, gender, training level and ambient temperature on forelimb and back temperature in racehorses, “Animal Science Journal”, Vol. 88, No. 2, 2017, 347–355, DOI: 10.1111/asj.12631.
27. Soroko M., Howell K., Infrared thermography: Current applications in equine medicine, “Journal of Equine Veterinary Science”, Vol. 60, 2018, 90–96, DOI: 10.1016/j.jevs.2016.11.002.
28. Soroko M., Jo dkowska E., Zabłocka M., The use of thermography to evaluate back musculoskeletal responses of young racehorses to training, “Thermology International”, Vol. 22, No. 3, 2012, 152–156.
29. Soroko-Dubrovina M., Zielińska P., Dudek K.D., Śniegucka K., Nawrot K., Thermal effects of high-intensity laser therapy on the temporomandibular joint area in clinically healthy racehorses—A pilot study, “Animals”, Vol. 15, No. 10, 2025, DOI: 10.3390/ani15101426.
30. Soroko-Dubrovina M., Zielińska P., Śniegucka K., Nawrot K., Dobrowolski M., Dudek K., Effect of BEMER physical vascular therapy on body surface temperature changes in race-
horses: A pilot study, “Medycyna Weterynaryjna”, Vol. 81, No. 5, 2025, 231–236, DOI: 10.21521/mw.7000.
31. Śniegucka K., Soroko-Dubrovina M., Zielińska P., Dudek K., Žuffová K., The effect of radial extracorporeal shock wave therapy (rESWT) on the skin surface temperature of the longissimus dorsi muscle in clinically healthy racing Thoroughbreds: A preliminary study, “Animals”, Vol. 13, No. 12, 2023, DOI: 10.3390/ani13122028.
32. Tepp er O.M., Callaghan M.J., Chang E.I., Galiano R.D., Bhatt K.A., Baharestani S., Gan J., Simon B., Hopper R.A., Levine J.P., Gurtner G.C., Electromagnetic fields increase in vitro and in vivo angiogenesis through endothelial release of FGF-2, “FASEB Journal”, Vol. 18, No. 11, 2004, 1231–1233, DOI: 10.1096/fj.03-0867fje.
33. Tunley B.V., Henson F.M.D., Reliability and repeatability of thermographic examination and the normal thermographic image of the thoracolumbar region in the horse, “Equine Veterinary Journal”, Vol. 36, No. 4, 2004, 306–312, DOI: 10.2746/0425164044890652.
34. Turner T.A., Thermography as an aid to the clinical lameness evaluation, “Veterinary Clinics of North America: Equine Practice”, Vol. 7, No. 2, 1991, 311–338, DOI: 10.1016/S0749-0739(17)30502-3.
35. Turner T.A., Thermography: Use in equine lameness, [In:] Ross, M. W., & Dyson, S. J. (Eds.), Diagnosis and Management of Lameness in the Horse, 2003, DOI: 10.1016/B978-0-7216-8342-0.50025-0.
36. Turner T.A., Rantanen N.W., Hauser M.L., Alternate methods of soft tissue imaging, Proceedings of the 1st Dubai International Equine Symposium, 1996, 165–176, DOI: 10.5555/20220237686.
37. Westermann S., Buchner H., Schramel J., Tichy A., Stanek C., Effects of infrared camera angle and distance on measurement and reproducibility of thermographically determined temperatures of the distolateral aspects of the forelimbs in horses, “Journal of the American Veterinary Medical Association”, Vol. 242, No. 3, 2013, 388–395, DOI: 10.2460/javma.242.3.388.
38. Yanmaz L.E., Okumus Z., Thermographic assessment of extremity temperature alterations in cases with bucked shin complex, splints, carpal osteoarthritis and sesamoiditis in sport horses, “Erciyes Üniversitesi Veteriner Fakültesi Dergisi”, Vol. 15, No. 1, 2018, 41–45, DOI: 10.32707/ercivet.2018150108
39. Zielińska P., Nicp oń J., Kiełbowicz Z., Soroko M., Dudek K., Zaborski D., Effects of high intensity laser therapy in the treatment of tendon and ligament injuries in performance horses, “Animals”, Vol. 10, No. 8, 2020, DOI: 10.3390/ani10081327.
40. Zielińska P., Soroko M., Godlewska M., Śniegucka K., Dudek K., Howell K., Photothermal effects of high-intensity laser therapy on the superficial digital flexor tendon area in clinically healthy racehorses, “Animals”, Vol. 12, No. 10, 2022, 1253. DOI: 10.3390/ani12101253.
41. Zielińska P., Soroko M., Howell K., Godlewska M., Hildebrand W., Dudek K., Comparison of the effect of high-intensity laser therapy (HILT) on skin surface temperature and vein diameter in pigmented and non-pigmented skin in healthy racehorses, “Animals”, Vol. 11, No. 7, 2021, DOI: 10.3390/ani11071965.
42. Zielińska P., Soroko-Dubrovina M., Śniegucka K., Dudek K., Čebulj-Kadunc N., Effects of high-intensity laser therapy (HILT) on skin surface temperature and vein diameter in healthy racehorses with clipped and non-clipped coat, “Animals”, Vol. 13, No. 2, 2023, DOI: 10.3390/ani13020216.
The Use of Thermography in the Assessment of Physical Therapy Devices in Racehorses
Abstract: TThe aim of this study was to analyze the potential application of thermography as a tool for evaluating the effects of selected physical therapy modalities in clinically healthy horses. The study discusses the use of thermography to assess the physiological responses of equine tissues subjected to laser therapy, extracorporeal shock wave therapy, and magnetotherapy. Based on a review of the literature and clinical research findings, thermography has been shown to enable an objective evaluation of therapeutic effects and may serve as an indicator of the safety of prophylactic procedures in clinically healthy horses. The development and standardization of thermography in the assessment of physical therapy effects may contribute to the unification of therapeutic protocols, improved treatment efficacy, and the enhancement of care standards for sport horses.
dr hab. inż. Maria Soroko-Dubrovina, prof. UP maria.soroko@upwr.edu.pl
ORCID: 0000-0002-8585-8000
W 2010 r. uzyskała tytuł magistra w zakresie nauk o koniach (Equine Science) na Aberystwyth University w Wielkiej Brytanii, a w 2013 r. stopień doktora nauk rolniczych w dyscyplinie zootechnika na Uniwersytecie Przyrodniczym we Wrocławiu. W 2019 r. uzyskała stopień doktora habilitowanego w Uniwersytecie Rolniczym w Krakowie. Stypendystka programu Fulbrighta (Purdue University, USA, 2018). Jej zainteresowania naukowe koncentrują się na termoregulacji koni, wykorzystaniu termografii w diagnostyce weterynaryjnej oraz rehabilitacji. Jest autorką licznych publikacji naukowych oraz współautorką książki „Equine Thermography in Practice” (CABI, 2016; 2023). Członkini European Association of Thermology, organizatorka kursów i konferencji poświęconych rehabilitacji koni oraz nowoczesnym metodom diagnostyki obrazowej.
dr hab. Paulina Zieleńska, prof. UP paulina.zielinska@upwr.edu.pl
ORCID: 0000-0001-6767-8367
Specjalista chorób koni. Dyplom lekarza weterynarii uzyskała w 2013 r. na Uniwersytecie Przyrodniczym we Wrocławiu. W 2018 r. uzyskała stopień naukowy doktora nauk weterynaryjnych broniąc rozprawy doktorskiej „Za stosowanie laseroterapii wysokoenergetycznej w leczeniu urazów ścięgien u koni”. W 2022 r. uzyskała tytuł Specjalisty Chorób Koni na Uniwersytecie Warmińsko-Mazurskim w Olsztynie, zaś w 2024 r., otrzymała stopień naukowy doktora habilitowanego za badania nad wpływem laseroterapii wysokoenergetycznej na zdrowe tkanki narządu ruchu konia oraz na leczenie schorzeń ortopedycznych koni.
lek. wet. Karolina Śniegucka
karolina.sniegucka@upwr.edu.pl
ORCID: 0000-0002-4573-0109
Doktorantka Szkoły Doktorskiej Uniwersytetu Przyrodniczego we Wrocławiu od 2022 r. W 2018 r. ukończyła studia licencjackie na kierunku Biologia Człowieka, a w 2022 r. uzyskała dyplom lekarza weterynarii na Uniwersytecie Przyrodniczym we Wrocławiu. Jej zainteresowania naukowe koncentrują się wokół zastosowania laseroterapii wysokoenergetycznej w leczeniu chorób układu ruchu koni. Obecnie realizuje rozprawę doktorską pt. Wpływ laseroterapii wysokoenergetycznej na rehabilitację zapalenia kości i okostnej trzeciej kości śródręcza u koni wyścigowych.
Doktorantka Szkoły Doktorskiej Uniwersytetu Przyrodniczego we Wrocławiu od 2024 r. Jej badania koncentrują się na fizjologicznych i behawioralnych reakcjach starszych koni na doustną suplementację kannabidiolem (CBD). Współautorka publikacji naukowych dotyczących wpływu CBD na rytm serca, stężenie kortyzolu w ślinie oraz zachowanie koni poddanych testom lękliwości. Aktywnie uczestniczy w projektach badawczych związanych z dobrostanem koni i zastosowaniem naturalnych suplementów w terapii behawioralnej.
dr inż. Magdalena Drewka drewka@pbs.edu.pl
ORCID: 0000-0002-0003-6025
Adiunkt w Katedrze Hodowli i Żywienia Zwierząt na Wydziale Hodowli i Biologii Zwierząt Politechniki Bydgoskiej im. Jana i Jędrzeja Śniadeckich. Specjalizuje się w hodowli i użytkowaniu koni, prowadząc działalność naukową i dydaktyczną. Jej zainteresowania badawcze obejmują ocenę wartości użytkowej koni ras szlachetnych na podstawie wyników prób wierzchowych, ze szczególnym uwzględnieniem ich przydatności wierzchowej. Jest autorką i współautorką licznych publikacji naukowych poświęconych m.in. technice skoku przez przeszkodę, umiejętnościom poznawczym koni, syndromowi headshaking oraz wpływowi płci na cechy osobowości u koni.
Verification of the die Temperature of a SiC Transistor Based on the Thermal Imaging and Machine Learning
Krzysztof Dziarski
Poznań University of Technology, Institute of Electric Power Engineering, Piotrowo 3A, 60-965 Poznań, Poland
Arkadiusz Hulewicz
Poznań University of Technology, Institute of Electrical Engineering and Electronics, Piotrowo 3A, 60-965 Poznan, Poland
Abstract: The article presents a method for the automatic verification of the thermograms of the transistor packages, enabling the differentiation between those in which the die temperature is correct and those in which it is too high. This method is based on an indirect thermographic measurement of the transistor die temperature. The paper describes a measurement methodology that provides a reliable temperature assessment, based on simulations using the Finite Element Method (FEM). A transistor operating in pulsed mode (switching at a specific frequency, rather than in the active state) was used. The procedure for determining the coefficients required for these simulations is also presented. Additionally, the article includes an algorithm for analyzing thermograms of the investigated transistor packages and the results of this analysis, which allow for distinguishing components operating at the correct and excessive temperatures.
σ Stefan-Boltzmann constant dynamic air viscosity equal
c specific heat
CGS gate-source capacitance
Cth thermal capacity
e, f coefficients
Gr Grashof number
h r radiation coefficient
h c convection coefficient
IDS drain-source current
IDSS saturation current
IPt 1000 Pt 1000 current
(k)λ thermal conductivity
Nu Nusselt number
P c total power applied to the wall
P j power dissipated in die
Autor korespondujący: Krzysztof Dziarski, krzysztof.dziarski@put.poznan.pl
Pr Prandtl number
RDS drain-source resistance
RPt 1000 Pt 1000 resistance
T temperature
T a ambient temperature
T c the case temperature
T j the die temperature
T js die temperature determined by simulation
TPt 1000 Pt 1000 temperature
qv power density dissipated in the die
q heat flux
Vth threshold voltage
VDS drain-source voltage
VPt 1000 Pt 1000 voltage
Artykuł recenzowany nadesłany 02.07.2025 r., przyjęty do druku 08.09.2025 r.
1. Introduction
As the drain-source current ( I DS ) increases, the temperature of the transistor’s semiconductor structure (die) also rises. An increase in switching frequency likewise leads to a rise in die temperature [1, 2]. This occurs because more frequent switching results in higher switching losses. Consequently, the rising die temperature causes an increase in the temperature of the transistor’s package. Based on this relationship, the die temperature can be indirectly determined. In practice, it is crucial to quickly detect whether the die temperature exceeds permissible limits. It is also important to assess whether there is a risk of the damage to the semiconductor structure. The excessive die temperature shortens the operational lifespan of the transistor and increases the risk of damage to internal connections (bond wires). A rise in die temperature also affects the transistor’s parameters. For example, the threshold voltage Vth, the saturation current IDSS, and the gate-source capacitance CGS all change. Additionally, the shape of the drain current ID versus drain-source voltage VDS cha-
racteristic is altered. If the die temperature exceeds a critical threshold, the permanent damage to the semiconductor structure may occur [3].
There are two methods for monitoring the die temperature. The first is the direct method, which involves placing a temperature sensor directly on the die structure [4]. The second is the indirect method, which can be divided into two categories [5].
The first category is the indirect electrical method. It involves determining the die temperature based on a parameter that depends on that temperature. This parameter is called a Thermal Sensitive Parameter (TSP). A detailed description of these methods can be found in the JEDEC (EIA/JESD51-1) standards [16].
The second category is the indirect thermal method. It consists of two stages. First, the case temperature of the transistor (T c) is measured. Then, based on a known relationship T j = f(T c), the die temperature (T j) of the semiconductor structure is determined. This category includes the indirect infrared thermographic measurement of temperature. In this case, T c is measured using a thermographic camera. This type of measurement does not require damaging the transistor package. It is also safe for the user, as there is no risk of the electric shock.
The relationship T j = f(T c) can be determined using the numerical methods, including the Finite Element Method (FEM). The indirect thermographic method enables the evaluation of the die temperature without physical contact. However, it requires reading the temperature from the thermogram and using the transfer function T j = f(T c) [6–9].
In practice, the useful method would be one that automatically classifies thermograms, distinguishing between those that show a transistor with a normal die temperature and those in which the die temperature is too high. To this end, a study was conducted with the aim of developing a method for automatic classification of the thermograms of the transistor package, based on the temperature of the semiconductor die.
2. Methodology
2.1. The measurement system
As the part of the experimental setup, a C2m0280120d transistor from Wolfspeed (Durham, NC, USA) was used. This SiC-based device features the maximum drain-source voltage of 1200 V, the continuous drain current IDS of 11 A at 25 °C, and an on-state resistance RDS of 280 mΩ – nominal specifications [17].
In order to develop a method for the automatic classification of the thermograms depicting the transistor package based on the temperature of the semiconductor die, it was necessary to create a thermogram database. This required knowing the die temperature of the transistor at the moment the package thermogram was captured. For this purpose, an indirect thermographic temperature measurement was proposed. The first part of the applied method involved performing a reliable measurement of the transistor package temperature.
To avoid the issue of unknown emissivity of the transistor package, a reference marker was applied to its surface using Velvet Coating 811-21, which is characterized by a well-defined emissivity coefficient (ε) in the range 0.970 to 0.975 within the temperature interval of 237.15 K to 355.15 K. The uncertainty of the emissivity value was estimated to be 0.004 [10].
Adjacent to the marker, the Pt 1000 temperature sensor in an SDM 0603 package (Royal Ohm, Chachoengsao, Thailand) [18] was attached directly to the surface of the epoxy mold compound that encapsulates the transistor die and base plate. The sensor was positioned in a location estimated to be directly
above the die. Placing the Pt 1000 sensor next to the marker allowed for the verification of the reliability of the thermographic temperature measurement.
The sensor was bonded using WLK 5 thermal adhesive (Fischer Elektronik, Lüdenscheid, Germany), known for its thermal conductivity of 0.836 W/m·K in the temperature range of 217.15 K to 422.15 K [19].
The electrical connections were made using a four-wire measurement setup, including a current source, voltmeter and ammeter. Due to the small form factor of the sensor package, thin wires with a diameter of 0.3 mm were employed. To avoid self-heating effects, a measurement current of 100 µA was applied. The preliminary tests confirmed that this current level does not introduce the significant thermal error. The resistance RPt 1000 was calculated by dividing the measured voltage VPt 1000 by the applied current IPt 1000. The discussed measurement system is shown in Figure 1.
The transistor assembly was positioned beneath a thermographic camera, maintaining a 33 mm gap between the transistor and the camera lens. For this study, a FLIR E50 thermographic camera (Flir, Wilsonville, OR, USA) [15] equipped with a Close 2× macro lens was used. Measurements were carried out under the steady-state thermal conditions.
Preliminary observations revealed that the temperature of the epoxy mold compound differed from the ambient temperature by more than 80 mK. Moreover, the successive measurement points confirmed that the temperature of the mold compound consistently exceeded this threshold. These findings justified the use of a thermographic system employing an uncooled microbolometer detector array, which was deemed appropriate for the purposes of this study.
The area of the epoxy mold compound observed during measurement covered a surface of 20 mm by 21 mm. The FLIR E50 thermographic camera utilized in the experiment is equipped with an uncooled microbolometer sensor array with a native resolution of 240 × 180 px [21]. According to the Close-up 2 × lens specifications [22], the Instantaneous Field of View (IFOV) corresponding to this setup is 87 µm.
Given this IFOV value, it is possible to capture more than nine individual detector fields (pixels) across the observed region, confirming that the spatial resolution of the imaging system is adequate for the analysis. Prior to conducting measurements, the camera’s calibration was verified against a reference blackbody source (IRS Calilux IP, AT – Automation Technology, Bad Oldesloe, Germany) to ensure the accuracy of the thermal readings [23].
The thermographic camera and the transistor assembly were placed inside a custom-built enclosure constructed from plexiglass, with the internal dimensions of 40 cm × 30 cm × 30 cm
Fig. 1. The temperature measurement setup using a Pt 1000 sensor
Rys. 1. Układ pomiarowy do pomiaru temperatury za pomocą czujnika Pt 1000
The inner walls of the container were lined with polyurethane-based black foam. Due to the structure of its open-cell pores, which resemble the behavior of a blackbody cavity, this material exhibits a high emissivity value of approximately ε = 0.94 [11]. This design effectively shielded the measurement setup from the external thermal influences and significantly reduced the internal reflections.
To adjust the distance d between the lens of the thermographic camera and the surface of the epoxy mold compound, the camera was mounted on a tripod integrated with a stepper motor. This motorized positioning system allowed for precise control of d, managed by a Siemens S7-1200 1214DC/DC/DC programmable logic controller (Siemens, München, Germany) [24]. The desired distance was set using a Siemens KTP 700 Basic PN touchscreen interface [25]. A view of the complete measurement setup is shown in Figure 2.
2.2. Finite element method and boundary conditions
An essential stage in the process of the indirect thermographic temperature measurement is identifying the correlation between the die temperature and the case temperature. This correlation can be determined through numerical simulations. A commonly used approach for this purpose is the Finite Element Method (FEM). In this method, the analyzed domain – where the temperature distribution is to be assessed – is divided into a finite number of tetrahedral elements.
The equation 1 expresses the heat transfer along the x-axis between two specific points [12]:
By applying the method of the separation of the variables and integrating the equation 2, the time constant can be obtained using the boundary conditions specified in the equation 3.
where qv is the power density dissipated in the die in W/m3, cth is the volumetric thermal capacity in J/(m3K), and T is the temperature.
Under steady-state conditions, the equation 1 simplifies to the form shown in the equation 2 [12]:
Once the time constant has been determined and it is assumed that the heat flux q has fully traversed the wall, the equation 3 can be rearranged into the form presented in the equation 4.
where q is the heat flux in W/m2
where P c is the total power applied to the wall in W and S in m2 is the area of the wall penetrated by q in W/m2
To ensure the accurate simulations using the Finite Element Method (FEM), it is essential to define both the radiation coefficient h r and the convection coefficient h c . The value of h r can be calculated using the equation 5.
The convection coefficient h c characterizes the rate of heat transfer by convection per unit area and time. Accurately determining h c is difficult due to its dependence on the multiple variables, including the object’s geometry, the structural complexity and the surface temperature. In this work, h c was approximated using similarity theory related to transport phenomena. The relationships between the key physical parameters were described using dimensionless numbers such as the Nusselt, Grashof, and Prandtl numbers. For flat surfaces, the convection coefficient can be calculated using the formula presented in the equation 6 [15].
(6)
The Nusselt number can be expressed using the equation 7 [15]:
where e and f are dimensionless coefficients, the values of which depend on the shape and the orientation of the analyzed surface and the product P r ·G r P r (−) is the Prandtl number, G r is the Grashof number.
The coefficients e and f depend on the product of the Grashof and Prandtl numbers, as well as on the orientation of the surface in question and the type of airflow – whether laminar or turbulent. The suitable values for these coefficients are provided in Table 1 [13].
Tab. 1. Values of the coefficients e and f Tab. 1. Wartości współczynników e i f
Fig. 2. The measuring system Rys. 2. Układ pomiarowy
Verification
The Prandtl number can be obtained using the equation 8 [13]:
where c is the sp ecific air heat equal to 1005 in J kg−1 K−1 in 293.15 K, ψ is the dynamic air viscosity equal to 1.75 × 10−5 in kg m−1 s−1 in 273.15 K.
Grashof number is obtained from the equation 9 [13]:
where α is a coefficient of expansion equal to 0.0034 in K−1, g is the gravitational acceleration of 9.8 in m∙s−2, ρd is air density equal to 1.21 in kg m−3 in 273.15 K.
2.3. Classification of thermal images of SiC transistors
Thermograms showing the transistor case with a die at a proper temperature and those with an overheated die can be distinguished. For the automatic classification of the thermo-
Fig. 3. a) The algorithm for data loading, creating and training the neural networks and classifying thermograms, b) the algorithm illustrating the loading and classification of a thermogram. The training was carried out exclusively on the CPU, without the use of GPU acceleration or parallel computing. No data augmentation was applied. The average processing time per epoch was approximately 10 seconds.
Rys. 3. a) Algorytm ładowania danych, tworzenia i trenowania sieci neuronowych oraz klasyfikacji termogramów, b) algorytm ilustrujący ładowanie i klasyfikację termogramu. Uczenie przeprowadzono wyłącznie na CPU, bez wykorzystania akceleracji GPU ani obliczeń równoległych. Nie zastosowano augmentacji danych. Średni czas przetwarzania jednej epoki wynosił około 10 sekund.
Tab. 2. Structure of the defined neural network Tab. 2. Struktura zdefiniowanej sieci neuronowej
grams, a Convolutional Neural Network (CNN) architecture was selected [14, 15]. This type of artificial neural network is specifically designed to process the image data. Its fundamental component is the convolutional layer, whose task is to detect the image features such as edges, lines, curves, and texture. These layers can also be trained to recognize color-related patterns if the color is present in the input data. An important part of the CNN architecture is the ReLU (Rectified Linear Unit) activation layer. The presence of this layer enables, among other things, the modeling of more complex relationships and helps to mitigate the issues such as the vanishing gradient problem.
In the conducted study, MATLAB was used to create and train the convolutional neural network, along with the Deep Learning Toolbox and Image Processing Toolbox packages. The Deep Learning Toolbox is responsible for creating and training the neural networks, while the Image Processing Toolbox is used for loading, processing and analyzing images.
A database of 48 thermograms was used for the study. Twenty of them depicted the transistor package with an excessively high die temperature, while the remaining twenty-eight showed the package with an appropriate die temperature. The first stage of the study involved loading the images with the labels and verifying the number of thermograms in each class. The thermograms were divided into two classes: those with proper die temperature and those with improper die temperature. Next, the input file size was selected, and a loading function was defined. The thermograms were then split into a training set and a test set in an 80/20 ratio, meaning 20 % of the thermograms were placed in the test set, and the remaining 80 % in the training set. After defining the CNN architecture, the training options were set. Only 10 epochs were sufficient to train the neural network. Finally, the classification and the code testing were carried out. Figure 3a presents the algorithm used for data loading, the neural network construction and training, and thermogram clas-
4. An example loss curve
Rys. 4. Przykładowa krzywa strat
sification. Figure 3b illustrates the procedure for loading and classifying an individual thermogram.
The designed Convolutional Neural Network (CNN) had a layered structure composed of the sequentially connected elements. The input layer accepted color images in JPG format, stored in the RGB color model. Immediately after the input layer, the first convolutional block was applied, consisting of a convolutional layer with 8 filters of size 3 × 3 (with ‘same’ padding), a batch normalization layer, a ReLU activation function, and a max pooling layer with dimensions 2 × 2 and a stride of 2. The second convolutional block included a convolutional layer with 16 filters of size 3 × 3 (also with ‘same’ padding), followed by batch normalization, ReLU activation, and a max pooling layer with the same parameters as in the first block. The third block used 32 filters of size 3 × 3 and also included a batch normalization layer and a ReLU activation function. At the end of the architecture, a fully connected layer was placed, generating two outputs corresponding to the classes “correct” and “incorrect”. These outputs were converted into probabilities using the softmax layer and the final classification was performed by the classification layer, based on the highest predicted probability. The applied architecture is presented in Table 2. An example loss curve is shown in Figure 4.
3. Results
The research work began with the acquisition of a series of 48 thermograms. For this purpose, the measurement system shown in Figure 2 was used. During the experiments, the IDS current was set successively to 0.25 A, 0.5 A, and 1.5 A. For each IDS value, the transistor switching frequency f was varied. An example thermogram is shown in Figure 5.
Next, the measurements of the internal dimensions of the transistor case were carried out. For this purpose, the transistor package was opened. To calibrate the microscope prior to the
Fig. 5. Example thermogram for IDS = 0.25 A, f = 10 kHz
Rys. 5. Przykładowy termogram dla IDS = 0,25 A, f = 10 kHz
Fig. 6. a) The completed model with the mesh and the point where the results were recorded, b) the cross-section of the element for IDS = 0.25 A, f t = 100 kHz
Rys. 6. Kompletny model tranzystora z siatką oraz punktem, w którym rejestrowano wyniki, b) przekrój elementu dla IDS = 0,25 A, f t = 100 kHz
measurements, a calibration slide was used. As a result, it was possible to create a three-dimensional model.
Tab. 3. The size of the mesh elements, the obtained results and the duration of the simulation
Tab. 3. Wymiary elementów siatki, uzyskane wyniki oraz czas trwania symulacji
The model and the simulation work were carried out using SolidWorks software. The appropriate mesh size was determined by varying the edge length of the mesh cells. Simultaneously, the accuracy of the obtained results and simulation time were monitored. The sample results are presented in Table 3. The mesh cell size shown in the last row was selected for use in the simulation.
The completed model with the mesh and the point where the results were recorded is shown in Fig. 6a. Figure 6b presents the cross-section of the element for IDS = 0.25 A, ft = 100 kHz.
The materials assigned to the individual components of the model, along with the selected properties, are presented in Table 4.
Based on the simulation work, it was possible to determine the relationship between the die temperature and the case temperature of the transistor. The obtained results are presented in Tables 5–8.
Fig.
Tab. 4. The materials assigned to the individual components of the model, along with the selected properties [8] Tab. 4. Materiały przypisane do poszczególnych elementów modelu wraz z wybranymi właściwościami [8]
In order to increase the number of the thermograms in the dataset, the additional thermograms were added. The measured values recorded during their acquisition are shown in Table 8.
Due to the low turn-on and turn-off times of SiC transistors (on the order of 10–12 ns), at an average current IDS ≤ 1.5 A, the switching losses depend only slightly on frequency. As a result, the junction temperature T j and the case temperature T c depend only slightly on the device switching frequency.
Tab. 5. The measured values of T c (temperature measurement by the thermographic camera), the measured values of TPt 1000 (temperature measurement by Pt 1000) and the values of Tjs (die temperature determined by the simulation) for all values of f t and IDS = 0.25 A
Tab. 5. Zmierzone wartości T c (pomiar temperatury kamerą termowizyjną), zmierzone wartości TPt 1000 (pomiar temperatury czujnikiem Pt 1000) oraz war tości Tjs (temperatura złącza wyznaczona w symulacji) dla wszystkich wartości f t i IDS = 0,25 A
No.
After completing the measurements, the obtained thermograms were divided into two classes: the thermograms representing a transistor with a proper die temperature and the thermograms representing a transistor with an improper (too high) die temperature. The first class consisted of 28 thermograms. These were thermograms showing a transistor through which a drain current IDS of 0.25 A and 0.5 A was flowing –Tables 5 and 6, as well as the first two rows of Table 7. The second class included the remaining thermograms – Table 8 and Table 7, rows 3 to 9.
Tab. 6. The measured values of T c (temperature measurement by the thermographic camera), the measured values of TPt 1000 (temperature measurement by Pt 1000) and the values of Tjs (die temperature determined by the simulation) for all values of f t and IDS = 0.50 A
Tab. 6. Zmierzone wartości T c (pomiar temperatury kamerą termowizyjną), zmierzone wartości TPt 1000 (pomiar temperatury czujnikiem Pt 1000) oraz wartości Tjs (temperatura złącza wyznaczona w symulacji) dla wszystkich wartości f t i IDS = 0,50 A
No. ft IDS T c TPt 1000 T js [–][kHz][A][K][K][K] 110.50324.4324.3344.6 250.50324.8324.5345.2 3100.50324.9324.8345.3 4500.50325.7325.4346.4 51000.50326.5326.4347.6 61500.50327.1327.0348.4 72000.50327.8327.5349.4
Next, a neural network was created and trained using the MATLAB environment along with the Deep Learning Toolbox and Image Processing Toolbox. The algorithm presented in Fig. 3a was used. Thermograms were tested randomly using the algorithm shown in Fig. 3b. To verify the final classification results, a confusion matrix was prepared. The classification accuracy was calculated to be 90 %. The confusion matrix is presented in Table 9.
Next, the division of thermograms was modified. The ratio of the training dataset to the testing dataset was set to 50/50. Additionally, the number of the epochs was increased to 12. classification accuracy of 83.33 % was achieved. The confusion matrix is presented in Table 10.
4. Conclusion and discussion
The objective of the conducted work was to develop a method enabling the automatic classification of the thermograms into two categories: those showing a transistor package with a die operating at an appropriate temperature and those with an elevated die temperature. A threshold value of 351.3 K (78.15 °C) was adopted. This value was arbitrarily selected based on the authors’ observations. It was necessary to establish this threshold in order to divide the thermograms into two classes – representing either acceptable or excessive die temperatures – for the purpose of training the classification model. For die temperatures not exceeding this value, no malfunction of the transistor was observed. This applies to a transistor operating without a heatsink, under the natural convection conditions and at an ambient temperature
Table 7. The measured values of T c (temperature measurement by the thermographic camera), the measured values of TPt 1000 (temperature measurement by Pt 1000) and the values of Tjs (die temperature determined by the simulation) for all values of ft and IDS = 1.00 A
Tab. 7. Zmierzone wartości T c (pomiar temperatury kamerą termowizyjną), zmierzone wartości TPt 1000 (pomiar temperatury czujnikiem Pt 1000) oraz wartości Tjs (temperatura złącza wyznaczona w symulacji) dla wszystkich wartości f t i IDS = 1,00 A
(T a) = 20 °C. When calculating the power dissipated in the transistor die, the conduction, blocking, and switching losses were taken into account.
The obtained thermographic temperature measurement results were verified by comparison with measurements performed using a Pt 1000 sensor (Tables 5–8). Considering the thermographic camera’s accuracy of ±2 °C or ±2 % of the reading (whichever is greater), it can be observed that the thermographic temperature measurements of the transistor package are consistent with the results obtained using the Pt 1000 sensor. Additionally, prior to performing the measurements, the thermographic camera’s readings were validated using a blackbody reference. Therefore, the thermographic temperature measurement results can be regarded as reliable.
Analyzing the thermograms reveals that the case temperature depends on the die temperature. In the conducted study, the die temperature was determined based on the indirect
Tab. 8. The measured values of T c (temperature measurement by the thermographic camera), the measured values of TPt 1000 (temperature measurement by Pt 1000) and the values of Tjs (die temperature determined by the simulation) for all values of f t and IDS
Tab. 8. Zmierzone wartości T c (pomiar temperatury kamerą termowizyjną), zmierzone wartości TPt 1000 (pomiar temperatury czujnikiem Pt 1000) oraz war tości Tjs (temperatura złącza wyznaczona w symulacji) dla wszystkich wartości f t i IDS
Tab. 9. The confusion matrix determined for a training-to-testing dataset ratio of 20/80
Tab. 9. Macierz pomyłek wyznaczona dla stosunku zbioru treningowego do testowego wynoszącego 20/80
Tab. 10. The confusion matrix determined for a training-to-testing dataset ratio of 50/50
Tab. 10. Macierz pomyłek wyznaczona dla stosunku zbioru treningowego do testowego wynoszącego 50/50
thermographic temperature measurement. It is possible to associate the thermogram (image) with the die temperature. Based on the authors’ previous work, it can be concluded that the proposed method of the indirect thermographic temperature measurement provides reliable results.
The thermogram classification using a CNN (Convolutional Neural Network) is feasible and provides reliable results. In the conducted study, the thermograms were divided into a training set and a test set in ratios of 20/80 and 50/50. Analyzing the results presented in Table 9, it can be observed that out of 10 thermograms in the test set, 3 were correctly identified as the thermograms showing a transistor with an excessively high die temperature, 6 thermograms were correctly classified as depicting the transistor case with a proper die temperature and 1 thermogram was incorrectly classified as showing a transistor with a proper die temperature. The overall classification accuracy reached 90 %.
When the thermograms were divided into a training set and a test set in a 50/50 ratio, the test set included 24 thermograms. Of these, 6 were correctly identified as the thermograms showing a transistor with an excessively high die temperature, 14 thermograms were correctly classified as depicting the transistor case with a proper die temperature and 4 thermograms were incorrectly classified as showing a transistor with a proper die temperature. The overall classification accuracy was 83.33 %.
The presented method should be further developed. The results obtained so far should be considered preliminary. In the future, a larger number of thermograms from a wider range of components should be analyzed. The proposed method may prove useful for the rapid real-time analysis of the performance of the electronic components.
The article presents the concept of using a Convolutional Neural Network (CNN) for the classification of the thermograms into two categories: thermograms showing a transistor package with an appropriate die temperature and the thermograms showing a transistor package with an inappropriate die temperature. The presented results are preliminary findings. For this reason, a small dataset consisting of 28 thermograms was used. To perform a proper classification, it is necessary to use a dataset containing several hundred thermograms.
Bibliography
1. Morel C., Rizoug N., Electro-Thermal Modeling, Aging and Lifetime Estimation of Power Electronic MOSFETs, “Civil Engineering Research Journal”, Vol. 14, No. 1, 2023, DOI: 10.19080/CERJ.2023.14.555879.
2. Morel C., Morel J., Chaos Anticontrol and Switching Frequency Impact on MOSFET Junction Temperature and Lifetime, “Actuators”, Vol. 14, No. 5, 2025, DOI: 10.3390/act14050203.
3. Lelis A.J., Habersat D.B., Green R., Goldsman N., Temperature-Dependence of SiC MOSFET Threshold-Voltage Instability, “Materials Science Forum”, Vols. 600–603, 2008, 807–810, DOI: 10.4028/www.scientific.net/msf.600-603.807.
4. Davidson J.N., Stone D.A., Foster M.P., Gladwin D.T , Measurement and characterization technique for real-time die temperature prediction of MOSFET-based power electronics, “IEEE Transactions on Power Electronics”, Vol. 31, No. 6, 2016, 4378–4388, DOI: 10.1109/TPEL.2015.2476557.
5. Dziarski K., Hulewicz A., Kuwałek P., Wiczyński G., Methods of Measurement of Die Temperature of Semiconductor Elements: A Review, “Energies”, Vol. 16, No. 6, 2023, DOI: 10.3390/en16062559.
6. Sathik M.H.M., Pou J., Prasanth S., Muthu V., Simanjorang R., Gupta A.K., Comparison of IGBT junction temperature measurement and estimation methods-a review, [In:]
Asian Conference on Energy, Power and Transportation Electrification (ACEPT), 2017, DOI: 10.1109/ACEPT.2017.8168600.
7. Minkina W., Theoretical basics of radiant heat transfer-practical examples of calculation for the infrared (IR) used in infrared thermography measurements, “Quantitative InfraRed Thermography Journal”, Vol. 18, No. 4, 2021, 269–282, DOI: 10.1080/17686733.2020.1738164.
8. Dziarski K., Hulewicz A., Skrzypczak S., Indirect thermographic die temperature measurement of a SiC-based semiconductor diode under the conditions of natural and forced convection, “Quantitative InfraRed Thermography Journal”, Vol. 22, No. 3, 2024, 210–234, DOI: 10.1080/17686733.2024.2360254.
9. Rabczuk T., Xiao S.P., Sauer M., Coupling of mesh‐free methods with finite elements: basic concepts and test results, “Communications in Numerical Methods in Engineering”, Vol. 22, No. 10, 2006, 1031–1065, DOI: 10.1002/cnm.871.
10. Kawor E.T., Mattei S., Emissivity measurements for Nextel Velvet Coating 811-21 between –36 °C and 82 °C, [In:] 15th European Conference on Thermophysical Properties, Vol. 33, 551–556, DOI: 10.1068/htwu385.
11. Baillis D., Coquard R., Randrianalisoa J., Dombrovsky L., Viskanta R., Thermal radiation properties of highly porous cellular foams, “Special Topics & Reviews in Porous Media: An International Journal”, Vol. 4, No. 2, 2013, 111–136, DOI: 10.1615/SpecialTopicsRevPorousMedia.v4.i2.20.
12. Feng S.Z., Cui X.Y., Li G.Y., Transient thermal mechanical analyses using a face-based smoothed finite element method (FS-FEM), “International Journal of Thermal Sciences”, Vol. 74, 2013, 95–103, DOI: 10.1016/j.ijthermalsci.2013.07.002
13. Dziarski K., Hulewicz A., Domb ek G., Drużyński Ł., Indirect Thermographic Temperature Measurement of a Power-Rectifying Diode Die, “Energies”, Vol. 15, No. 9, 2022, DOI: 10.3390/en15093203.
14. Mingxing T., Quoc V.L., EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks, International Conference on Machine Learning ICML 2019, DOI: 10.48550/arXiv.1905.11946.
Weryfikacja temperatury struktury półprzewodnikowej tranzystora
SiC na podstawie obrazowania termowizyjnego i uczenia maszynowego
Streszczenie: W artykule przedstawiono metodę automatycznej weryfikacji termogramów obudów tranzystorów. Umożliwia rozróżnienie tych, które przedstawiają strukturę półprzewodnikową o właściwej temperaturze od tych przedstawiających strukturę półprzewodnikową o niewłaściwej temperaturze. Metoda ta opiera się na pośrednim termograficznym pomiarze temperatury struktury półprzewodnikowej tranzystora. W pracy opisano metodykę pomiaru, która zapewnia wiarygodną ocenę temperatury struktury przewodnikowej struktury półprzewodnikowej tranzystora. Zaproponowana metoda bazuje na pracach symulacyjnych z wykorzystaniem Metody Elementów Skończonych (MES). W badaniach zastosowano tranzystor pracujący w trybie impulsowym (przełączanie z określoną częstotliwością). Przedstawiono również metodę wyznaczania współczynników niezbędnych do wykonania prac symulacyjnych. Dodatkowo artykuł zawiera algorytm analizy termogramów obudów badanych tranzystorów oraz wyniki tej analizy. W konsekwencji możliwe jest rozróżnienie tranzystorów ze strukturą półprzewodnikową o właściwej temperaturze od tranzystorów ze struktura półprzewodnikową w niewłaściwej temperaturze.
Słowa kluczowe: termografia, sztuczna sieć neuronowa, konwolucyjna sieć neuronowa
A graduate of the Faculty of Electrical Engineering at the Poznan University of Technology, where he has been employed since 2001. Currently an assistant professor and academic teacher in the Department of Metrology of Electronics and Light Technology. Author and co-author of 93 publications. His main scientific interests are metrology, the thermographic measurements, the bio-measurements and the biomedical engineering, the optoelectronics, as well as modeling and signal processing, especially the thermal modelling.
Krzysztof Dziarski, PhD Eng. krzysztof.dziarski@put.poznan.pl
ORCID: 0000-0002-7877-4116
Assistant Professor at the Institute of Electric Power Engineering, Poznań University of Technology. He obtained a PhD in technical sciences with a specialization in electrical engineering, focusing on advanced methods of thermal diagnostics in electronic systems. His doctoral dissertation concerned the application of infrared thermography and numerical simulations to analyze heat dissipation in semiconductor components. His research interests include thermal management, thermographic diagnostics, and reliability analysis of electronic components. He actively participates in scientific projects and teaching activities, supervising engineering and master’s theses in the field of temperature measurement techniques, electronics, and residential electrical installations.
Informacje dla Autorów
Za artykuł naukowy – zgodnie z Komunikatem Ministra Nauki i Szkolnictwa Wyższego z dnia 29 maja 2013 r. w sprawie kryteriów i trybu oceny czasopism naukowych – należy rozumieć artykuł prezentujący wyniki oryginalnych badań o charakterze empirycznym, teoretycznym, technicznym lub analitycznym zawierający tytuł publikacji, nazwiska i imiona autorów wraz z ich afiliacją i przedstawiający obecny stan wiedzy, metodykę badań, przebieg procesu badawczego, jego wyniki oraz wnioski, z przytoczeniem cytowanej literatury (bibliografię). Do artykułów naukowych zalicza się także opublikowane w czasopismach naukowych opracowania o charakterze monograficznym, polemicznym lub przeglądowym, jak również glosy lub komentarze prawnicze.
Wskazówki dla Autorów przygotowujących artykuły naukowe do publikacji
Artykuły naukowe zgłoszone do publikacji w kwartalniku naukowotechnicznym Pomiary Automatyka Robotyka powinny spełniać następujące kryteria formalne: – ty tuł artykułu (nieprzekraczający 80 znaków) w języku polskim oraz angielskim, – imię i nazwisko Autora/Autorów, adres e-mail, afiliacja (instytucja publiczna, uczelnia, zakład pracy, adres), – streszczenie artykułu (o objętości 150–200 słów) w języku polskim oraz angielskim, – słowa kluczowe (5–8 haseł) w języku polskim oraz w języku angielskim angielskim,
– zasadnicza część artykułu – w języku polskim (lub w j. angielskim), – podpisy pod rysunkami w języku polskim oraz w języku angielskim, – ty tuły tabel w języku polski oraz w języku angielskim, – ilustracje/grafika/zdjęcia jako osobne pliki w formacie .eps, .cdr, .jpg lub .tiff, w rozdzielczości min. 300 dpi, min. 1000 pikseli szerokości, opisane zgodnie z numeracją grafiki w tekście.
Artykuł powinien mieć objętość równą co najmniej 0,6 arkusza wydawniczego, nie powinien przekraczać objętości 1 arkusza wydawniczego (40 000 znaków ze spacjami lub 3000 cm2 ilustracji, wzorów), co daje ok. 8 stron złożonego tekstu. W przypadku artykułów przekraczających tę objętość sugerowany jest podział na części. Nie drukujemy komunikatów!
Do artykułu muszą być dołączone notki biograficzne wszystkich Autorów (w języku artykułu) o objętości 500–750 znaków oraz ich aktualne fotografie.
Redakcja zastrzega sobie prawo dokonywania skrótów, korekty językowej i stylistycznej oraz zmian terminologicznych.
Przed publikacją autorzy akceptują końcową postać artykułu.
System recenzencki PAR
Redakcja przyjmuje wyłącznie artykuły oryginalne, wcześniej niepublikowane w innych czasopismach, które przeszły etap weryfikacji redakcyjnej
Autorzy ponoszą całkowitą odpowiedzialność za treść artykułu. Autorzy materiałów nadesłanych do publikacji są odpowiedzialni za przestrzeganie prawa autorskiego. Zarówno treść pracy, jak i zawarte w niej ilustracje, zdjęcia i tabele muszą stanowić dorobek własny Autora, w przeciwnym razie muszą być opisane zgodnie z zasadami cytowania, z powołaniem się na źródło.
Oddaliśmy do dyspozycji Autorów i Recenzentów System Recenzencki, który gwarantuje realizację tzw. podwójnie ślepej recenzji. Przesyłając artykuł do recenzji należy usunąć wszelkie elementy wskazujące na pochodzenie artykułu – dane Autorów, ich afiliację, notki biograficzne.
Dopiero po recenzji i poprawkach sugerowanych przez Recenzentów artykuł jest formatowany zgodnie z przyjętymi zasadami. W przypadku zauważonych problemów, prosimy o kontakt z Redakcją.
Kwartalnik naukowotechniczny Pomiary Automatyka Robotyka jest indeksowany w bazach BAZTECH, Google Scholar oraz ICI Journals Master List (ICV 2023: 98,13), a także w bazie naukowych i branżowych polskich czasopism elektronicznych ARIANTA. Przyłączając się do realizacji idei Otwartej Nauki, udostępniamy bezpłatnie wszystkie artykuły naukowe publikowane w kwartalniku naukowo-technicznym Pomiary Automatyka Robotyka. Punktacja Ministerstwa Edukacji i Nauki za publikacje naukowe w kwartalniku Pomiary Automatyka Robotyka wynosi obecnie 70 pkt. (wykaz czasopism naukowych i recenzowanych materiałów z konferencji międzynarodowych z dnia 5 stycznia 2024 r., poz. 29984, Unikatowy Identyfikator Czasopisma 200205). Przypisane dyscypliny naukowe – automatyka, elektronika, elektrotechnika i technologie kosmiczne.
Oświadczenie dotyczące jawności informacji o podmiotach przyczyniających się do powstania publikacji
Redakcja kwartalnika naukowotechnicznego Pomiary Automatyka Robotyka , wdrażając politykę Ministra Nauki i Szkolnictwa Wyższego odnoszącą się do dokumentowania etycznego działania Autorów, wymaga od Autora/Autorów artykułów podpisania przed przyjęciem artykułu do druku druku w kwartalniku oświadczenia zawierającego:
1. in formację o udziale merytorycznym każdego wymieniowego Autora w przygotowaniu publikacji –celem jest wykluczenie przypadków tzw. „guest authorship”, tj. dopisywania do listy Autorów publikacji nazwisk osób, których udział w powstaniu publikacji był znikomy albo w ogóle nie miał miejsca.
2. in formację o uwzględnieniu w publikacji wszystkich osób, które miały istotny wpływ na jej powstanie – celem jest: – potwierdzenie, że wszystkie osoby mające udział w powstaniu pracy zostały uwzględnione albo jako współautorzy albo jako osoby, którym autor/autorzy dziękują za pomoc przy opracowaniu publikacji, – potwierdzenie, że nie występuje przypadek „ghostwriting”, tzn. nie występuje sytuacja, w której osoba wnosząca znaczny wkład w powstanie artykułu nie została wymieniona jako współautor ani nie wymieniono jej roli w podziękowaniach, natomiast przypisano autorstwo osobie, która nie wniosła istotnego wkładu w opracowanie publikacji;
3. informację o źródłach finansowania badań, których wyniki są przedmiotem publikacji – w przypadku finansowania publikacji przez instytucje naukowo-badawcze, stowarzyszenia lub inne podmioty, wymagane jest podanie informacji o źródle środków pieniężnych, tzw. „financial disclosure” – jest to informacja obligatoryjna, nie koliduje ze zwyczajowym zamieszczaniem na końcu publikacji informacji lub podziękowania za finansowanie badań.
Umowa o nieodpłatne przeniesienie praw majątkowych do utworów z zobowiązaniem do udzielania licencji CC-BY
Z chwilą przyjęcia artykułu do publikacji następuje przeniesienie majątkowych praw autorskich na wydawcę. Umowa jest podpisywana przed przekazaniem artykułu do recenzji. W przypadku negatywnych recenzji i odrzucenia artykułu umowa ulega rozwiązaniu.
Redakcja na mocy udzielonej licencji ma prawo do korzystania z utworu, rozporządzania nim i udostępniania dowolną techniką, w tym też elektroniczną oraz ma prawo do rozpowszechniania go dowolnymi kanałami dystrybucyjnymi.
Zapraszamy do współpracy
Poza artykułami naukowymi publikujemy również materiały informujące o aktualnych wydarzeniach, jak konferencje, obronione doktoraty, habilitacje, uzyskane profesury, a także o realizowanych projektach, konkursach – słowem, o wszystkim, co może interesować i integrować środowisko naukowe. Zapraszamy do recenzowania/ polecania ciekawych i wartościowych książek naukowych.
Podczas cytowania artykułów publikowanych w kwartalniku naukowo-technicznym
Pomiary Automatyka Robotyka prosimy o podawanie nazwisk wszystkich autorów, pełną nazwę czasopisma oraz numer DOI, np.:
Krzysztof Oprzędkiewicz, Numerical Analysis of the Discrete, Fractional Order PID Controller using FOBD and CFE Approximations, „Pomiary Automatyka Robotyka”, ISSN 1427-9126, R. 29, Nr 3/2025, 5–11, DOI: 10.14313/PAR_257/5.
www.jamris.org
www.par.pl
www.automatykaonline.pl/automatyka
Absolwent Wojskowej Akademii Technicznej, Wydziału Mechatroniki (2004 r.). Pracę doktorską w naukach technicznych w dyscyplinie budowa i eksploatacja maszyn Wielokryterialna optymalizacja konstrukcji i sterowania wyrzutni elektromagnetycznej w zastosowaniu do liniowego napędu narzędzia roboczego obronił na Wydziale Technologii i Edukacji Politechniki Koszalińskiej (2010 r.). Promotorem pracy był prof. dr hab. inż. Wojciech Tarnowski. W pracy podjęto się zadania zbudowania modelu matematycznego i symulacyjnego celem określenia optymalnych parametrów konstrukcji i optymalnego sterowania prądowego, ze względu na sprawność energetyczną układu, energię kinetyczną narzędzia roboczego oraz masę urządzenia, a także opracowanie algorytmu polioptymalizacji konstrukcji wyrzutni elektromagnetycznej. W latach 2004–2017 pełnił służbę w Brygadzie Lotnictwa Marynarki Wojennej. Od 2017 r. pracuje w Akademii Marynarki Wojennej w zespole kmdr. dr. hab. inż. Piotra Szymaka, prof. AMW. 21 czerwca 2024 r. uzyskał stopień doktora habilitowanego nauk inżynieryjno-technicznych w dyscyplinie naukowej inżynieria mechaniczna nadany przez Radę Naukową Instytutu Technicznego Wojsk Lotniczych. Przewodniczącym Komisji Habilitacyjnej był prof. dr hab. inż. Stefan Berczyński. Główne zainteresowania badawcze Pawła Piskura koncentrują się na robotyce morskiej, w szczególności na morskich pojazdach bezzałogowych.
kmdr por. dr hab. inż. Paweł Piskur
Badania parametrów
konstrukcyjnych i sterujących jednopłetwowego napędu biomimetycznego
Recenzenci – prof. dr hab. inż. Jerzy Świder, prof. dr hab. inż. Sebastian Skoczypiec, dr hab. inż. Piotr Wolszczak, prof. PL oraz dr hab. inż. Łukasz Pieczonka, prof. AGH – ocenili dorobek naukowy zatytułowany Badania parametrów konstrukcyjnych i sterujących jednopłetwowego napędu biomimetycznego. Osiągnięcie naukowe przedstawione zostało w formie jednotematycznego cyklu jedenastu publikacji.
W skład osiągnięcia naukowego wchodzi jedenaście publikacji wydanych w latach 2020–2023. Podsumowując sześcioletni okres aktywności naukowej (2017–2023) w Akademii Marynarki Wojennej, sumaryczny wskaźnik IF za wszystkie opublikowane prace naukowe wynosił 37,016.
W cyklu artykułów składających się na osiągnięcie naukowe można wyróżnić następujące główne kierunki prac:
opracowane podstaw doświadczalnych identyfikacji podstawowych parametrów napędów biomimetycznych, zaplanowanie, realizację i analizę wyników eksperymentów w tunelu wodnym, opracowanie efektywnych obliczeniowo algorytmów opisu kinematyki wybranej grupy napędów biomimetycznych,
opis wzajemnego oddziaływania biomime tycznego napędu i płynu, do boru parametrów dla sterowania kursem biomimetycznego pojazdu podwodnego, opracowanie stanowiska badawczego do pomiaru naporu netto biomimetycznego układu napędowego, op racowanie metody analizy wzajemnego oddziaływania napędu biomimetycznego i płynu z wykorzystaniem cyfrowej anemometrii obrazowej PIV (ang. Particle Image Velocimetry), opracowanie metody wyznaczenia liczby Strouhala dla układu nurek-płetwa-woda z wykorzystaniem algorytmów cyfrowego przetwarzania obrazów.
Cykl publikacji obejmował badania biomimetycznego napędu falowego, w szczególności składającego się z pojedynczej, elastycznej płetwy w zastosowaniu do pojazdu podwodnego oraz dla pływaków i nurków.
Wzajemne oddziaływanie jednopłetwowego napędu biomimetycznego z lepkim płynem wymaga analizy szeregu zjawisk, których nieliniowe zależności oraz turbulentny charakter płynu skutkują, że opracowanie dokładnego modelu symulacyjnego jest trudne w realizacji i kosztowne obliczeniowo. Aktualnie prowadzone są badania nad wykorzystaniem sztucznych sieci neuronowych do modelowania zjawiska wzajemnego oddziaływania elastycznego ciała stałego i płynu. Jednak danymi uczącymi sieć neuronową są głównie wyniki eksperymentu przeprowadzone na stanowiskach laboratoryjnych.
Przedstawiony w autoreferacie cykl publikacji obejmuje przede wszystkim wyniki badań eksperymentalnych, przeprowadzonych w czterech tunelach wodnych. Każdy z tuneli wyposażony jest w czujnik do pomiaru siły wzajemnego oddziaływania napędu i płynu oraz liniowy laser wraz z kamerą do rejestrowania trajektorii markerów, szczególnie w obszarze wzajemnego oddziaływania napędu z płynem. Badania w czterech tunelach wodnych umożliwiły przeprowadzenie analiz dla różnych prędkości płynu, w szerokim zakresie parametrów materiałowych i sterujących.
Zaprezentowane w cyklu publikacji wyniki analiz parametrów konstrukcyjnych i sterujących jednopłetwowego napędu biomimetycznego, obejmują pełen cykl badań kinematyki i dynamiki oraz wzajemnego oddziaływania napędu z płynem. Przyjęta strategia badań obejmowała eksperymentalną analizę kinematyki z wykorzystaniem cyfrowego przetwarzania obrazów wizyjnych oraz wyznaczenie nieznanych parametrów modelu Lighthilla, dla jednopłetwowego napędu biomimetycznego. Na zaprojektowanych stanowiskach badawczych wykonanych zostało szereg pomiarów generowanego naporu netto z równoczesnym pomiarem energii elektrycznej zużywanej przez układ wykonawczy, a także analizy ugięcia płetw i prędkości płynu w obszarach wzajemnego oddziaływania z napędem. Przeprowadzona analiza doboru parametrów i sprawności napędu została wykonana w odniesieniu do żywych organizmów morskich. Na podstawie przeprowadzonych badań można stwierdzić, że możliwe jest zaprojektowanie jednopłetwowego napędu biomimetycznego o zakładanych parame-
Pojazd podwodny opracowany przez zespół kmdra dra hab. inż. Piotra Szymaka, prof. AMW, w ramach projektu Europejskiej Agencji Obrony pk. SABUVIS
Projekt tunelu wodnego opracowany w r amach projektu „Biodive Fin – innowacyjne biomimetyczne płetwy pływackie dla zastosowania cywilnego”
trach eksploatacyjnych, w tym wysokiej sprawności energetycznej. Opracowana, autorska metoda cyklicznego eksportu danych wyznaczonych metodą PIV do macierzy trójwymiarowej, umożliwia analizę parametrów napędu biomimetycznego dla pełnego cyklu roboczego.
Przy ocenie istotności aktywności naukowej za największy wkład w rozwój dyscypliny naukowej inżynieria mechaniczna uznano wyniki Grantu Badawczego Ministerstwa Obrony Narodowej Badanie charakterystyk biomimetycznego napędu falowego – FSI, realizowanego we współpracy z Portugalską Akademią Marynarki Wojennej z Alfeite-Lizbona (Portugalia). W projekcie wykorzystano m.in. kompetencje nabyte w trakcie studiów na Politechnice w Madrycie (Hiszpania) oraz podczas realizacji międzynarodowych projektów: – SABUVIS – Swarm of Biomimetic Underwater Vehicles for Underwater ISR , którego kierownikiem był kmdr dr hab. inż. Piotr Szymak, prof. AMW; – NEXTPROP – Next generation of propellers, którego kierownikiem był dr hab. inż. Andrzej Grządziela, prof. AMW;
– Biodive Fin – Innowacyjne biomimetyczne płetwy pływackie dla zastosowania cywilnego
W kolejnych etapach pracy badawczej planowane jest zastosowanie sztucznych mięśni, w tym aktywnych polimerów do napędu pojazdów podwodnych. Opracowane stanowiska laboratoryjne zostaną wykorzystane w celu implementacji metod sztucznej inteligencji do opisu wzajemnego oddziaływania elastycznego ciała i płynu. Jako dane wejściowe do uczenia sztucznych sieci neuronowych będą użyte dane z eksperymentów prowadzonych metodą PIV oraz bezpośredniego pomiaru siły wzajemnego oddziaływania napędu z płynem.
Obszar wzajemnego oddziaływania napędu i płynu dla biomimetycznego pojazdu podwodnego
59
67
Sebastian Urbaś, Robert Olbrycht, Bogusław Więcek
Determination of the NETD Parameter Value of the Imaging System with a Single MWIR Detector for CO2 Detection
Jakub Tkaczyk, Maciej Tyszecki, Jacek Jabłoński, Paweł Piskur Projekt i wykonanie bezzałogowego statku powietrznego (BSP) typu oktokopter do akwizycji danych ze środowiska podwodnego sonarem
Ping 360
Piotr Golański, Michał Golański
77
85
93
Statystyczna ocena wydajności serwera symulatora mieszanej rzeczywistości
Marcin Leplawy, Piotr Lipiński, Barbara Morawska, Jakub Zdanowicz-Zasidko Zastosowanie kamer termowizyjnych do detekcji i śledzenia znaczników wizualnych w warunkach ograniczonej widzialności metodami sztucznej inteligencji
Paweł Rotter, Maciej Klemiato, Dawid Knapik, Maciej Rosół, Grzegorz Putynkowski Wizyjny system do wykrywania wtrąceń w elementach z tworzywa sztucznego wykorzystujący modele 3D
99
105
Bartosz Pawłowicz, Nikita Bailiuk, Paweł Wróbel, Marcin Goral System automatycznego regulowania temperatury w żelazku w oparciu o technikę RFID
Aleksandra Kłos-Witkowska, Vasyl Martsenyuk
Destabilizacja biosensorów na podstawie zmian impulsu elektromagnetycznego i absorpcji
111
119
Maria Soroko-Dubrovina, Karolina Śniegucka, Karolina Nawrot, Paulina Zielińska, Magdalena Drewka Wykorzystanie termografii w diagnostyce zabiegów fizykalnych u koni wyścigowych
Krzysztof Dziarski, Arkadiusz Hulewicz
Verification of the die Temperature of a SiC Transistor Based on the Thermal Imaging and Machine Learning