14 minute read
RMIT Trusted Autonomy in ATM and Avionics Systems


Trusted Autonomy in ATM and Avionics Systems: from Human-IN-the-Loop to Human-ON-the-Loop
Di. Roberto Sabatini, Nichakorn Pongsakornsathien, Alessandro Gardi
Advertisement
Advances in Cyber-Physical Systems (CPS) are accelerating the introduction of automated decision-making functionalities and the progressive transition to trusted autonomous operations both in civil and military aviation. Major benefits of these capabilities include de-crewing of flight decks and ground control centres, as well as the safe and efficient operations of air and space platforms in a shared, unsegregated environment (Figure 1). In the commercial aviation context, CPS are supporting the development of single pilot operated large passenger aircraft, with the co-pilot potentially replaced by a digital assistant and/or a remote pilot on the ground. A single remote pilot on the ground, on the other hand, will no longer be restricted to controlling a single aircraft and instead will be allowed to control multiple manned and unmanned vehicles, in line with the so-called One-to-Many (OTM) operational concept [1-3].
Important efforts are also being devoted to the integration of Unmanned Aircraft Systems (UAS) in all classes of airspace, eliciting the introduction of UAS Traffic Management (UTM) services seamlessly integrated with the existing (and evolving) ATM framework. In particular, Advanced Air Mobility (AAM) operations and, more specifically, Urban Air Mobility (UAM) services in very low-level ATM environments (below Class G) require substantial advances in Communication, Navigation, Surveillance (CNS) for Figure 1. Evolutionary pathway of ATMand avionics systems [4].
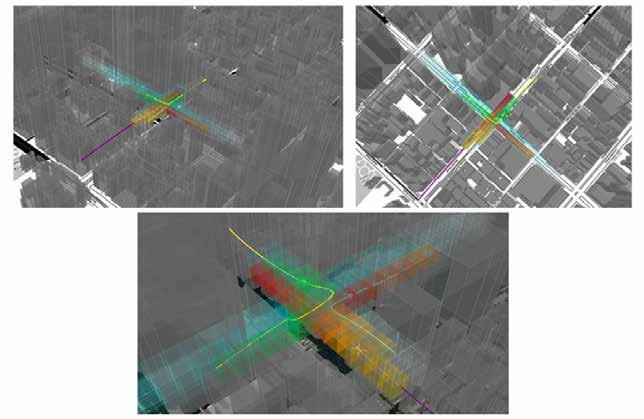
ATM (CNS/ATM) and Avionics (CNS+A) technologies and associated regulatory frameworks, especially to enable low-altitude and Beyond-Line-of-Sight (BLoS) operations (Figure 2). Recent advances in communications, navigation and Sense-and-Avoid (SAA) technology are therefore progressively supporting UTM operations in medium-to-high density operational environments, including urban environments [5]. Research efforts are also necessary to demonstrate the feasibility of CNS+A technologies capable of contributing to the emission reduction targets set by the International Civil Aviation Organization (ICAO), national governments and various large-scale international research initiatives. Therefore, growing emphasis is now being placed on environmental performance enhancements, focusing on Air Traffic Flow Management (ATFM), dynamic airspace management, 4-dimensional (4D) trajectory optimization, airport automation and, in the near future, urban flight operations [6, 7].
Figure 2. Concept of CNS+A for autonomous deconfliction in UAM [8].

The passenger UAM industry is expected to generate revenues of about $90 billion a year by 2050, with 160,000 commercial eVTOLs (electrical vertical take-off and landing) in regular operation. While established industry players will likely continue to invest in UAM vehicles and CNS+A systems despite the challenges of COVID-19, startups with sufficient funding will probably focus on demonstration flights to gain operational knowledge and build public acceptance. In this context, the initial developments will likely address less complex use cases, such as cargo operations, to “prove the concept” and initiate the revenue stream. Indeed, research investments in physical and digital technologies (both for vehicle and infrastructure) will be very important but, to secure a significant slice of this $90 billion market, it will be essential to develop new business models focussing on value co-creation and partnership between manufacturers, operators and infrastructure providers. Important developments are also occurring at the opposite boundary of atmospheric flight, towards enabling Upper Class E operations. To date, Upper Class E airspace operations have been limited in scope due to the inherent challenges of flying in a low-density atmosphere above FL600. Recent advances in power and propulsion, aircraft structures, avionics systems and aerodynamics have allowed the development and initial deployment of both manned and unmanned aircraft that overcome these limitations. These new aircraft types can fulfil a variety of civil and military requirements, including wide area Earth observation, telecommunications, supersonic passenger flight, defence ISR (intelligence, surveillance and reconnaissance) and several R&D missions. Regulations and standards are now evolving to support safe operations in Upper Class E airspace. While multiple use cases and business opportunities are clearly emerging, environmental sustainability aspects must be carefully considered. In addition to CNS+A technologies for air operations, space CPS are also being researched for a wide range of practical applications including commercial satellites, space transport/tourism, and interplanetary scientific missions. In this context, it is anticipated that economically viable and reliable CPS will play a fundamental role in the successful development of the space sector and significant research efforts are needed in the field of reusable space transportation systems, Space Traffic Management (STM), and Intelligent Satellite Systems (SmartSats). In particular, the operation of space launch and re-entry platforms currently requires considerable airspace segregation provisions, which if continued will become increasingly disruptive to civil air traffic. Moreover, the currently limited space situational awareness is posing significant challenges to the safety and sustainability of spaceflight due to the rapidly growing amount of resident space objects and particularly orbital debris [9]. The deployment of network-centric CNS+A systems and their functional integration with ground-based ATM in a Space Traffic Management (STM) frame-
work will support a much more flexible and efficient use of the airspace with higher levels of safety. These evolutions will support the transition to what the research community have started designating as Multi-Domain Traffic Management. To support these developments, the ongoing largescale aviation/aerospace modernisation initiatives (SESAR, NextGen, UTM, AAM, etc.) increasingly rely on artificial intelligence and big data to support automated decision making in next generation CNS+A systems. However, there are some important challenges that must be addressed before the full potential of these technologies can be realised.
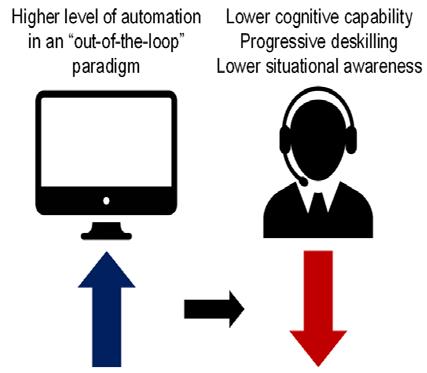
Some of these challenges are well-known while others are less understood. First of all, automation is becoming more and more complex, with the widespread adoption of heterogeneous sensor networks and the need for optimisation algorithms that deal with an increasing amount of input data, multiple objectives and constraints. A well-known side effect of this complexity is the loss of situational awareness of the human operator, which is no longer capable of evaluating the validity and quality of the solutions implemented [11, 12]. Secondly, most of the automation we are introducing is deterministic and not adaptive enough and, paradoxically, it may end up by increasing the workload of the operator in certain scenarios instead of alleviating it. This is why instances of cognitive overload are not infrequent despite dealing with highly automated systems. Finally, the kind of automation that is currently being adopted in complex systems is not deeply trusted by human operators because it lacks sufficient transparency or integrity. Recent research efforts have shown that attempting to remove the human operator from the decision making process can be particularly hazardous in present-day aviation systems [13]. This is not only because the human is prevented from performing remedial actions in case of anomalies, but also because s/he may develop an incorrect or incomplete mental picture of what is actually happening in the machine reasoning (Figure 4). Previous studies have been focusing on Human-In-The-Loop (HITL) design to prevent such hazardous situations. However, HITL implementations force the human operator to perform a considerable number of executive and tactical tasks. The operator would not be able to sustainably cope up with the envisaged density and complexity of tactical tasks, such as in the case of dense UAM and UTM scenarios [14, 15], hence potentially creating a critical bottleneck. This is why the human-machine coordination itself (and not only the automation tasks) are shifting rapidly towards AI with Human-On-The-Loop (HOTL) operations. HOTL is a supervisory control paradigm where an operator focusses on high-level strategic tasks, meaning that the autonomous/intelligent system
performs all tactical level activities. The supervisory control includes planning goals and constraints, monitoring the automation’s execution, and intervening as necessary in case of unforeseen/anomalous situations [16]. Since most aerospace missions are safety-critical in nature, any possible critical event (traffic conflicts, systemic failures, etc.) needs to be promptly detected and resolved or, ideally, avoided. Hence, the synergy of AI with HOTL architectures is seen as a possible solution to the problem, since the AI can prevent/mitigate imminent hazards without requiring the operator’s approval as in HITL operations, while the human is still informed and consulted, with the possibility of intervening if and when required. So, the aerospace information systems community is currently focusing on the development of two special categories of CPS: Autonomous Cyber-Physical (ACP) systems and Cyber-Physical-Human (CPH) systems. ACP systems operate without the need for human intervention or control. For ACP systems to work, formal reasoning is required as these systems are normally used to accomplish mission/safety-critical tasks and any deviation from the intended behaviour may have significant implications on human health, well-being, economy, etc. A sub-class is that of Semi-Autonomous Cyber-Physical (S-ACP) systems, which perform autonomous tasks in a specific set of pre-defined conditions but require a human operator otherwise. A separate category is that of CPH systems. These are a particular class of CPS where the interaction between the dynamics of the system and the cyber elements of its operation can be influenced by the human operator and the interaction between these three elements is regulated to meet specific objectives. CPH systems consist of three main components: physical elements sensing and modelling the environment, the systems to be controlled and the human operators; cyber elements including the communication links and software; and human operators who partially monitor the operation of the system and can intervene if and
Figure 4. Negative impact of high automation when human operators are “out-of-the-loop”. when needed.
“HOTL is a supervisory control paradigm where an operator focusses on high-level strategic tasks, meaning that the autonomous/intelligent system performs all tactical level activities.”
Today, several CPS implementations are S-ACP systems. This fact limits the achievable benefits and the range of possible applications due to the reduced fault-tolerance and the inability of S-ACP systems to dynamically adapt in response to external stimuli. Many S-ACP architectures are progressively evolving to become either ACP or CPH depending on the specific application domains. So, the real challenge is develop robust and fault- tolerant ACP and CPH system architectures that ensure trusted autonomous operations with the given hardware constraints, despite the uncertainties in physical processes, the limited predictability of environmental conditions, the variability of mission requirements (especially in congested or contested scenarios), and the possibility of both cyber and human errors. A key point in these advanced CPS is the control of physical processes from the monitoring of variables and the use of computational intelligence to obtain a deep knowledge of the monitored environment, thus providing timely and more accurate decisions and actions. The growing interconnection of physical and digital elements, and the introduction of highly sophisticated and efficient AI techniques, has led to a new generation of CPS, that is referred to as intelligent (or smart) CPS (iCPS). The demands of the “fourth industrial revolution”, also known as Industry 4.0, push the boundaries of iCPS to offer a broad range of opportunities for the development of novel avionics systems and services. Industry 4.0 focuses on new technologies to
deeply connect the digital world with the physical world. Current trends with clear avionics applications include: • advances in automation and autonomy; • enhanced human-machine and machine- machine communications; and • widespread adoption of artificial intelligence and machine learning. Four key technology drivers enable these trends: • big data and Internet of Things (IoT); • advances in sensor networking and data analytics; • improvements in transferring digital instructions to the physical world; and • new forms of human-machine interaction, such as cognitive, augmented and virtual reality systems. By equipping physical objects with interfaces to the virtual world and incorporating intelligent mechanisms to leverage collaboration between these objects, the boundaries between the physical and virtual worlds become blurred [17, 18]. Interactions occurring in the physical world are capable of changing the processing behaviour in the virtual world, a causal relationship that can be used for the constant improvement of processes [18, 19]. Intelligent, self-aware, self-managing and self-configuring systems can be built to improve the quality of processes across a variety of application domains. The introduction of high-performance AI requires a higher and better level of human-machine coordination. The key goal of this coordination is to ensure that automation is reliable and transparent so that the human will be able to trust it and interpretatively observe what and why the machine is doing [20]. This coordination is similar to the collaboration of multiple intelligent and trained human beings, and can thus reduce the cognitive load of each individual operator involved. One promising strategy for future ATM/UTM operations is to develop flexible Human-Machine Interfaces and Interactions (HMI2) which can seamlessly transition between HOTL to HITL in case of automation abnormalities, still allowing traffic controllers to veto and perform the task manually if necessary. However, and very importantly, an abrupt transition to HOTL operations without appropriate policies and training can lead to a progressive de-skilling of the human operator due to overreliance and/or complacency, with possible “backfiring” effects not just in terms of safety but also in terms of economic viability and long-term sustainability. So, correctly designed and operated HOTL architectures must include the right blend of ACP and CPH systems, with the human never left “out-of-the-loop”. This is why future ATM and avionics systems will introduce new adaptive forms of HMI2 supporting human-autonomy teaming and the full exploitation of intelligent cyber-physical health management technologies (both for vehicles and ground infrastructure) for the safe and automated reconfiguration of CNS+A systems in the presence of predicted or detected faults.
References
[1] Lim Y, Bassien-Capsa V, Ramasamy S, Liu J, and Sabatini R, “Commercial airline single-pilot operations: System design and pathways to certification”, IEEE Aerospace and Electronic Systems Magazine, vol. 32, pp. 4-21, 2017. [2] Lim Y, Pongsakornsathien N, Gardi A, Sabatini R, Kistan T, Ezer N, et al., “Adaptive Human-Robot Interactions for Multi-Unmanned Aircraft”, Robotics, 2020. [3] Lim Y, Gardi A, Sabatini R, Ramasamy S, Kistan T, Ezer N, et al., “Avionics Human-Machine Interfaces and Interactions for Manned and Unmanned Aircraft”, Progress in Aerospace Sciences, vol. 102, pp. 1-46, 2018. [4] Pongsakornsathien N, Lim Y, Gardi A, Hilton S, Planke L, Sabatini R, et al., “Sensor Networks for Aerospace Human-Machine Systems”, Sensors, vol. (in press), 2019. [5] Ramasamy S, Sabatini R, and Gardi A, “A Unified Analytical Framework for Aircraft Separation Assurance and UAS Sense-and-Avoid”, Journal of Intelligent and Robotic Systems: Theory and Applications, vol. 91, pp. 735-754, 2018. [6] Gardi A, Sabatini R, and Kistan T, “Multiobjective 4D trajectory optimization for integrated avionics and air traffic management systems”, IEEE Transactions on Aerospace and Electronic Systems, vol. 55, pp. 170-181, 2019. [7] Kistan T, Gardi A, Sabatini R, Ramasamy S, and Batuwangala E, “An evolutionary outlook of air traffic flow management techniques”, Progress in Aerospace Sciences, vol. 88, pp. 15-42, 2017. [8] Pongsakornsathien N, Bijjahalli S, Gardi A, Sabatini R, and Kistan T, “A Novel Navigation Performance-based Airspace Model for Urban Air Mobility”, IEEE/ AIAA 39th Digital Avionics Systems Conference, DASC 2020, San Antonio, TX, USA, 2020. [9] Hilton S, Sabatini R, Gardi A, Ogawa H, and Teofilatto P, “Space traffic management: towards safe and unsegregated space transport operations”, Progress in Aerospace Sciences, vol. 105, pp. 98-125, 2019. [10] Pongsakornsathien N, Gardi A, Sabatini R, Kistan T, and Ezer N, “Human-Machine Interactions in Very-Low-Level UAS Operations and Traffic Management”, IEEE/AIAA 39th Digital Avionics Systems Conference, DASC2020, San Antonio, TX, USA, 2020. [11] ICAO, “Human Factors training manual”, ed. Montreal, Canada, 1998. [12] Jorna PGAM, “ATM Human Factors and human resources considerations”, Air & Space Europe, vol. 2, pp. 58-64, 2000/09/01/ 2000. [13] Kirwan B, Evans A, Donohoe L, Kilner A, Lamoureux T, Atkinson T, et al., “Human factors in the ATM system design life cycle”, FAA/Eurocontrol ATM R&D Seminar, 1997, pp. 16-20. [14] Prevot T, Mercer J, Martin L, Homola J, Cabrall C, and Brasil C, “Evaluation of high density air traffic operations with automation for separation assurance, weather avoidance and schedule conformance”, 11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, including the AIAA Balloon Systems Conference and 19th AIAA Lighter-Than, 2011, p. 6890. [15] Sunil E, Hoekstra J, Ellerbroek J, Bussink F, Nieuwenhuisen D, Vidosavljevic A, et al., “Metropolis: Relating airspace structure and capacity for extreme traffic densities”, ATM seminar 2015, 11th USA/EUROPE Air Traffic Management R&D Seminar, 2015. [16] Sheridan T and Parasuraman R, “Human-Automation Interaction”, Reviews of Human Factors and Ergonomics, vol. 1, pp. 89-129, 06/01 2005. [17] “CPS Principles, Foundations, System Characteristics, and Complementary Skills”, in In A 21st Century Cyber-Physical Systems Education, ed. National Academies Press: National Academies of Sciences Engineering and Medicine, 2016. [18] Muller HA, “The rise of intelligent cyber-physical systems”, Computers, vol. 50, pp. 4837-4869, 2017. [19] Vijayakumar V, Subramaniyaswamy V, Abawajy J, and Yang L, “Intelligent, smart and scalable cyber-physical systems”, Journal of Intelligent Fuzzy Systems, vol. 36, pp. 3935-3943, 2019. [20] Kistan T, Gardi A, and Sabatini R, “Machine Learning and Cognitive Ergonomics in Air Traffic Management: Recent Developments and Considerations for Certification”, Aerospace, vol. 5, p. 103, 2018.