1 minute read
el modelo CAD


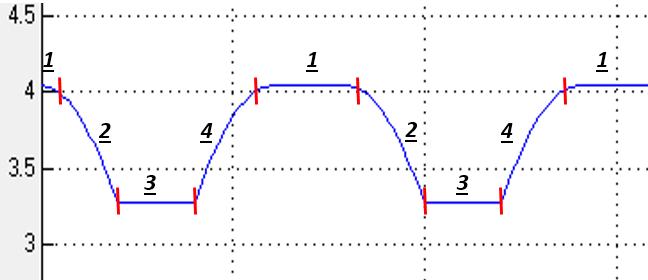
gravedad. Puede observarse en la Figura 55 la zona #1, en la cual el torque tiene valor constante, para conservar su posición de reposo. 2. Al momento de comenzar el cierre, es decir, cuando todos los qxy disminuyen su ángulo, se observa en la Figura 55 (zona 2) como el torque ejercido en las junturas analizadas disminuye, es decir, presenta una pendiente negativa a pesar de que se está ejecutando un movimiento, esto se debe a que como el movimiento ejercido va en la misma dirección de la gravedad es suficiente con disminuir el torque ejercido, más sin embargo no se hace ‘0’ cero, ya que el movimiento tiene unas características de velocidad y aceleración controladas y dadas por el perfil del movimiento dado en el capítulo 6.4, Figura 38. 3. Como se observa en la Figura 55, zona 3, una vez se llega a la posición de cierre determinada, se tiene un valor constante de torque, esto con el fin de asegurar la permanencia en esta posición por determinado tiempo, ya que se está trabajando en un entorno de simulación con vectores de gravedad. 4. Cuando el modelo CAD se encuentra en determinada posición de cierre, y se desea ir a la posición de reposo ([qx1=0; qx2=0; qx3=0; qx4=0; qx5=0] para todos los dedos) se hace necesario que sobre las articulaciones en movimiento se ejerza un torque mayor al que se venía realizando cuando se estaba en la posición de cierre, es decir, en este instante de tiempo la gráfica de los torques tiene pendiente positiva. Esto se debe a que, dada la posición y orientación del modelo, se hace necesario que este venza al vector de gravedad y logre desplazar la masa de los eslabones en movimiento. (Figura 55: Zona 4)
Figura 55. Descomposición por zonas del ejemplo de un perfil de torque generado por el modelo CAD
Advertisement
De igual manera, se analiza la magnitud de los perfiles de torque obtenidos, como se observa en la Figura 56, es posible establecer la relación entre la magnitud de los perfiles de torque y el cuerpo que está moviendo. Por ejemplo, en la Figura 56 se observa como la gráfica de torque #2 del modelo teórico (línea negra) corresponde al 28,6% de la gráfica de torque #1 del modelo teórico (línea


