1 minute read
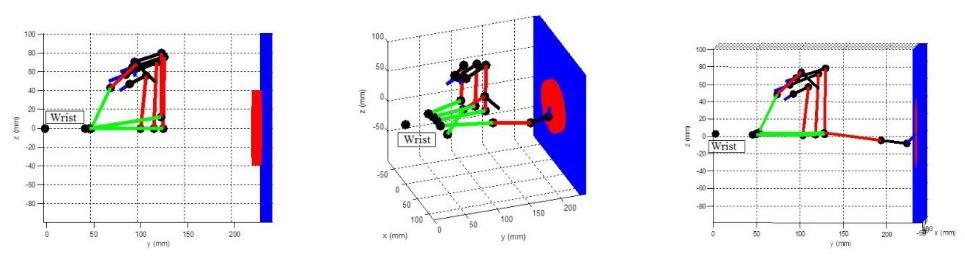
Figura 6. Simulaciones del posicionamiento de la mano robótica diseñada


Figura 6. Simulaciones del posicionamiento de la mano robótica diseñada.
Fuente: (Virgala, Kelemen, Varga, & Kurylo, 2014)
Advertisement
Una vez se han citado algunos de los antecedentes para el presente proyecto, se establecen los objetivos que enfocarán su ejecución. Como objetivo general del proyecto se postula:
Modelar y simular dinámicamente la mano de un menor de edad empleando software CAD y software de análisis matemático.
Y los objetivos específicos que permitirán alcanzar el objetivo general son:
Obtener el modelo cinemático y dinámico del funcionamiento de la mano humana aplicado a movimientos restringidos. Generar un modelo CAD que estructuralmente represente la mano humana y cumpla su modelo cinemático y dinámico. Validar el modelo cinemático del modelo CAD generado a partir del análisis, por medio de la integración del software de diseño y el software matemático. Evaluar el funcionamiento del modelo CAD diseñado por medio de simulaciones dinámicas, comparando su respuesta con la propia de la mano humana.
Establecidos los objetivos, la ejecución del proyecto se delimita a la realización del análisis, modelamiento y simulación de una estructura homóloga de una mano para un menor con 8 años de edad. Obteniéndose modelos matemáticos que describan el comportamiento de la mano humana, generando modelos CAD que representen su funcionamiento, validando los modelos obtenidos empleando software de ingeniería y generando simulaciones dinámicas que validen el modelo planteado, y finalizando con la realización de simulaciones dinámicas que permitan evaluar el funcionamiento del modelo CAD generado.



