1 minute read
Figura 3. Representación de un sistema de movimiento robótico en Simmechanics Figura 4. Representación del método de obtención del modelo cinemático de la mano


obtención de un modelo dinámico, el cual es proyectado en forma matricial para posteriormente evaluar y obtener los valores críticos para el diseño de las piernas. Una vez se tiene este modelo en su forma optimizada, se exporta a MATLAB para obtener simulaciones que corroboren el funcionamiento del sistema.
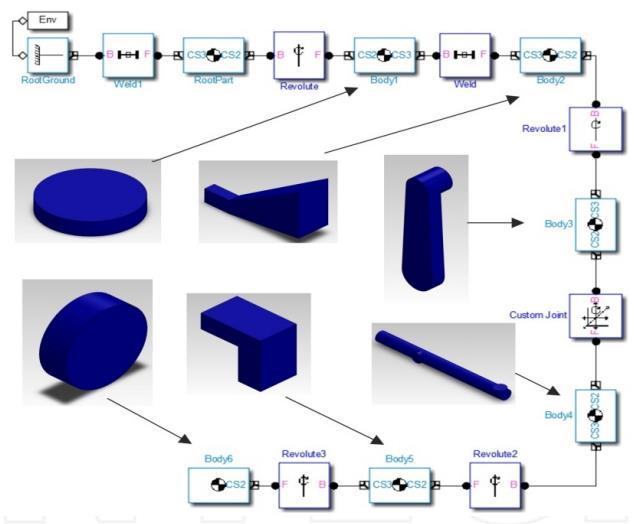
En lo relacionado con el análisis de movimiento de estructuras mecánicas empleando softwares de Ingeniería, se cita el trabajo titulado “Analysis of Robotic System Motion in SimMechanichs and MATLAB GUI Enviroment” ((Fedák, Durovský, & Üveges, 2014), en el cual se realiza una introducción al entorno SimMechanics, posteriormente se realiza el análisis para la generación de sistemas de bloques que homologuen sistemas robóticos con movimiento, como se observa en la Figura 3.
Advertisement
Figura 3. Representación de un sistema de movimiento robótico en Simmechanics
Fuente: (Fedák, Durovský, & Üveges, 2014)
Introduciendo el tema de la mano humana, con el uso de softwares de ingeniería y las simulaciones dinámicas, se destaca el artículo “ OVERALL DESING AND IMPLEMENTATION OF THE VIRTUAL GLOVE” (Placidi, Avola, Iacoviello, & Cinque, 2013), en el cual los autores presentan el diseño e implementación de un guante virtual para rehabilitación, para esto se parte de la caracterización de la mano humana empleando un modelamiento por estructuras y junturas, el cual como se observa en la Figura 4, permite realizar el análisis cinemático y dinámico tal como a un robot articulado de 3 grados de libertad, posterior a esto se generan las respectivas simulaciones estáticas y dinámicas, para la validación del modelo. De este artículo se destaca el método obtención del modelo matemático de la mano humana y sus diferentes representaciones.



