1 minute read
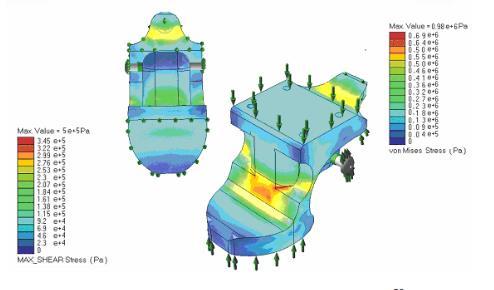
Figura 2. Simulación de comportamiento a carga en el diseño de talón


Mora, 2007) y “DISEÑO Y SIMULACIÓN DE UN SISTEMA CONTROLADO DE AMORTIGUACIÓN PARA LA RODILLA DE LA PRÓTESIS TRANSFEMORAL” (Garcia Chavez & Vargas Duque, 2007), ambos trabajos desarrollados en la Universidad de La Salle. Se destacan estos trabajos dado el uso de softwarre CAD para el diseño, simulación y análisis de las piezas componentes del prototipo en cada caso. En (Espejo Mora, 2007) se realiza un análisis por elementos finitos con el fin de predecir con precisión los esfuerzos y deformaciones a los que se verá sometido cada elementos (Figura 2). De igual manera en (Garcia Chavez & Vargas Duque, 2007) se realiza un análisis de esfuerzos presentes en el elemento de diseño, en este caso, una prótesis de rodilla, donde se determina mediante la simulación en Visual Nastran 4D los esfuerzos de Von Misses. Como resultado de estos análisis se determinó la distribución de esfuerzos y la ubicación de los puntos críticos por donde fallaría el prototipo al somerterse a una carga real. Se toma de estos dos trabajos de grado la aplicación de softwares CAD para la generación y simulación de prótesis
Figura 2. Simulación de comportamiento a carga en el diseño de talón.
Advertisement
Fuente: (Espejo Mora, 2007)
Dado que en el desarrollo del proyecto se hace necesaria la ejecución de simulaciones dinámicas, se hace revisión de los trabajos realizados que unan el desarrollo de un modelo y su posterior simulación en un entorno dinámico. Por esto se destaca el artículo “BIOMECHANICAL EFFECTS OF DAILY PHYSICAL ACTIVITIES ON THE LOWER LIMB” (Serbest, Cilli, & Eldogan, 2015), en el cual sus autores analizan los efectos a los que se somete las extremidades inferiores del cuerpo en actividades diarias tales como: actividad física de sentarse, ponerse de pie, agacharse, subir escaleras. Para esto se emplean modelos matemáticos que describen cada actividad, y dichos modelos son exportados a MATLAB, para por medio de toolbox realizar simulaciones dinámicas, las cuales permiten observar las cargas presentes en cada movimiento y los esfuerzos en las junturas de las extremidades. De igual forma, se destaca el artículo “DESIGN OF GEOMETRICAL PARAMETERS FOR WALKING MECHANISM LEG WITH USE OF MATLAB ALGORITHM AND SIMMECHANICS” (Bobovsky, 2014), en el cual se diseña un mecanismo caminante. Para esto, el autor parte de la



