
9 minute read
Daljinski vođeni robot za vizualni pregled reaktorske glave RPVH

from IRT3000 АДРИА #2

Kod periodičnih pregleda nuklearnih elektrana često se primenjuje metod vizuelnog pregleda, kod koga se stepen degradacije komponenata procenjuje na osnovu slika ili videosnimaka. Na mestima pregleda, gde zbog prejakog zračenja pristup nije moguć, potrebno je primeniti namenska pomoćna sredstva ili daljinski upravljane sisteme. Naš cilj je bio razviti i izraditi daljinski upravljanog mobilnog robota za izvođenje vizualnih pregleda reaktorske glave i proveriti ga na namenskoj maketi.
Za izradu prototipa i izradu robota bila je upotrebljena tehnologija 3D štampanja, gde smo na temelju mehaničkih, hemijskih i temperaturnih osobina izabrali ekološki najprikladniji materijal, u kome će robot obavljati posao. Za obavljanje inspekcije bilo je potrebno izabrati dimenziono odgovarajuću kameru. Pored toga, bilo je potrebno izabrati prikladne elektronske komponente: mikrokontroler i pogone za vođenje mobilnog robota, kao i mikroračunar za komunikaciju s operatorom. Bilo je potrebno razviti sve softverske interfejse za vođenje robota i za prenos i snimanje slika. Napravljena je aplikacija koja povezuje celovito delovanje sistema da bi operator lakše koristio robota. Mobilni robot je isproban na namenskoj maketi uz ispostavljanje jonizujućem zračenju. Na taj način smo isprobali prikladnost slike koju snima kamera na robotu i koja služi kao dokaz o stanju pregledanih komponenata u toku inspekcije.
Uvod
Često se susrećemo sa zahtevnim okruženjima, gde je teren vrlo neuobičajen i posledično nam je potreban kompleksan mehanizam, da bismo mogli da obavimo zadatke, kao što su na primer vožnja na planetama, penjanje robota po stepeništu itd. Upravo zato su teleoperacioni roboti postali vrlo omiljeni za obavljanje poslova na takvim opasnim područjima. Ali problem se javlja zbog kompleksnosti mehanizma – takvim robotom je čoveku često veoma teško upravljati. Čovek u tom slučaju vodi mobilnog robota i na taj način obavlja lokalizaciju, što je kognitivna aktivnost, pri čemu se oslanja na upravljačku shemu sistema [1].
U okviru pregleda delovanja nuklearnih elektrana potrebno je periodično pregledavati ključne komponente. Jedan od osnovnih metoda je postupak inspekcije, kojim možemo da proverimo degradacione procese na površini i pojave propuštanja primarnog medija za hlađenje. Ti pregledi se izvode dosta često, na nekim komponentama pri svakom prekidu rada, odnosno pri svakom drugom zaustavljanju, a u određenim slučajevima taj period može da bude i duži.
Često se događa da mesto pregleda nije neposredno dostupno, jer je jonizujuće zračenje previse intenzivno. Tada je potrebno upotrebiti razna pomoćna sredstva, kao što su videoskopi, rotirajuće kamere ili mobilni roboti s kamerom. Primeri mobilnih robota za obavljanje takvih inspekcija prikazani su na slici 1. S obzirom na mesto pregleda i konfiguraciju komponenata, moramo izabrati specifičnu opremu za pregled željenog mesta. Za sve sisteme koji se koriste za pregledavanje karakteristično je to da imaju dobro osvetljenje, optičke performanse, rezoluciju i mogućnost približavanja. Međusobno se razlikuju prema načinu kretanja ili vođenja.

Postupak izrade
Vozilo za izvođenje pregleda izrađeno je postupkom 3D štampanja plastike. Cilj je bio da krajnje vozilo bude sastavljeno od većeg broja standardnih delova i da ih je jednostavno zameniti u slučaju kvara. Električne instalacije robotskog vozila izabrane su tako da sadrže mnogo modularnih komponenata, koje je jednostavno zameniti, i na taj način se uštedi mnogo vremena u slučaju potrebe za popravkom ili servisom. Veoma je važan i izbor kamere s odgovarajućom rezolucijom, da bi udovoljila zahtevima koje propisuje standard i da može da podnese dovoljno veliku primljenu dozu jonizujućeg zračenja.
Konstruisanje mobilnog robota
Konstrukcija vozila napravljena je od plastike i s odgovarajućim dimenzijama, da bi robot mogao da se vozi po terenu na kome se izvodi inspekcija. Na robotu su ugrađene sve potrebne komponente potrebne za korektno delovanje. To su kamere, osvetljenje, motori i svi potrebni senzori. Mobilni robot je opremljen s dve kamere, inspekcijskom i dodatnom kamerom za vožnju unatrag. Položajem inspekcijske kamere je moguće manipulirati tako da se okreće i menja nagib (eng. Pan/Tilt). Kod inspekcije je korišćeno spoljno osvetljenje, ali robot svejedno ima i svoj izvor svetlosti za bolje pravljenje snimaka. Inspekcijska kolica su priključena na računar kontrolora preko veze po kojoj se šalju informacije i obavlja napajanje robota. Čitav system mobilnog robota i interfejsa za upravljanje prikazan je na slici 2.

Kinematika mobilnog robota
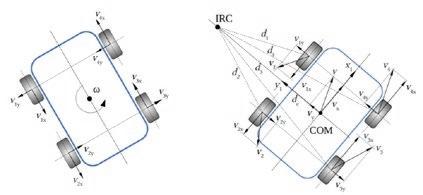
DKMR - klizno upravljani mobilni robot (engl. skid steer drive robot). Mobilni roboti s tehnologijom kliznog upravljanja upotrebljavaju se zbog robusne prirode mehaničke konstrukcije za vozila prikladna za vožnju po svim vrstama terena. Takvi mobilni roboti mogu da deluju u izuzetno zahtevnim uslovima, kao što je na primer istraživanje novih planeta i njihovih površina. Upravljanje DKMR-om se zasniva na diferencijalnom pogonu svih parova točkova koje ima mobilni robot, što je prikazano na slici 3. Iako takvo upravljanje donosi neke mehaničke prednosti, upravljanje DKMR-om je zahtevan zadatak, jer je za takvo upravljanje potrebno klizanje točkova u bočnom smeru, da bi mobilni robot mogao da vozi po željenoj putanji [2].
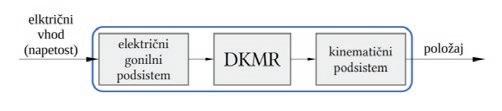
Za pisanje algoritma vođenja IVQ - mobilnog robota za obavljanje vizualne inspekcije (eng. Inspection Vehicle for Quality Control) opis je kinematski. Teren po kome će se voziti DKMR prilično je promenljiv, a točkovi za bolje prijanjanje upotrebljavaju magnete, koji donose veliki broj dodatnih prepreka za određivanje svih potrebnih sila koje su nam potrebne za dinamički opis. Zato se pri pisanju algoritma eksperimentalno odredi odgovarajuće kretanje robotskog vozila IVQ. Primer blok-sheme takvog modela prikazuje slika 4. Na temelju takve blok-sheme, DKMR je bio eksperimentalno prilagođen nepoznatim silama interakcije s tlom i razvijen je algoritam koji omogućava dosledno upravljanje robotom.
Metodologija istraživanja
Namen izrade IVQ – mobilnog robota
Svrha daljinski vođene kontrole na površini gornjeg dela reaktorske glave je kontrola žleba između RVHPA – penetracije kroz reaktorsku glavu – i spoljne površine glave. Pri inspekciji se usredotočuje pre svega na otkrivanje tragova mogućeg propuštanja primarnog medija za hlađenje i korozije, kao i utvrđivanje opšteg stanja. Pomoću takve inspekcije se obezbeđuje pouzdan pogon reaktora i odgovarajući nivo nuklearne bezbednosti. U slučaju da se tokom inspekcije utvrdi bilo kakvo odstupanje z obzirom na zahteve koji su na snazi na tom području, nepravilnosti se preventivno uklanjaju pre nego što dođe do događaja koji bi mogli da imaju velike posledice povezane s pouzdanošću rada i nuklearnom bezbednošću objekta.
Robot ima mehanizam koji omogućava manipulaciju kamerom namenjenu obavljanju inspekcije. Različite kontrole za pomeranje i kretanje vozila obavljaju se preko kontrolne ploče koja je povezana na upravljački system: Robot je u celini upravljan preko povezanog računara s namenski razvijenim softverom, kao što prikazuje slika
2. Pored inspekcijske kamere, na zadnju stranu robota je potrebno dodati još jednu kameru, koja je namenjena za vožnju unatrag i pomoć pri lociranju odnosno navigaciji vozila prilikom vožnje napred. Obe kamere treba da su dobro osvetljene, jer je okolina delovanja robota tamna. Na taj način smo obezbedili bolju vidljivost i bolju izoštrenost slike koju snima kamera. Vodič, s kojim je IVQ povezan, mora da bude savitljiv i fleksibilan, da bi što manje ometao kretanje robota. Mobilni robot upotrebljava sistem za vožnju DKMR (klizno upravljani mobilni robot). Tokom same inspekcije moramo IVQ mobilnog robota dovesti do željene pozicije i napraviti snimak površine, koji će služiti kao dokaz o izvedenoj inspekciji i za kasniju evaluaciju. Za trening i demonstraciju bila je napravljena i maketa reaktorske glave, za testiranje mobilnog robota. Maketa i mobilni robot prikazani su na slici 5.

Pregled rekatorske glave
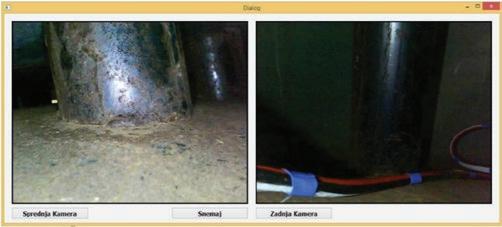
Pregled reaktorske glave smo obavili mobilnim robotom IVQ –DIGI. Za lakšu upotrebu smo izradili i aplikaciju s grafičkim interfejsom, koji povezuje čitav sistem i upravljanje robotom prilagodi korisniku. Čitav sistem je prikazan na slici 2, a grafički interfejs na slici 6.
Bilo je potrebno obaviti i dodatno osposobljavanje kontrolora. Radovi su se izvodili prema Code Case N-722-1. Zato je bilo potrebno i dodatno osposobljavanje za detekciju propuštanja borirane vode na komponentama od materijala Alloy 600/82/182 i rezultujuće korozije zbog borove kiseline na susednim komponentama od feritnog čelika. Izvedena je i vizualna inspekcija materijala spoljne površine reaktorske glave uključujući sve penetracije (zazor-žleb) za CRDM – RPVH BMV u skladu s tehničkom specifikacijom TS ISI – 06/20 u vreme remonta 2021. godine u NEK.
Pomoću vizuelnog pregleda utvrdili smo kakvo je stanje osnovnog materijala spoljne površine reaktorske glave, uključujući sve penetracije za CRDM. U vizualni pregled su bile uključene sve penetracije, pri čemu svaka mora biti pregledana u opsegu 360° po obodu. Zahtevan je pregled više od 95% penetracija. S tim pregledom smo otkrivali moguće propuštanje odnosno tragove propuštanja borirane vode. Čitav pregled je obavljen pomoću daljinski vođenog mobilnog robota IVQ – DIGI, koji za obavljanje takvih inspekcija mora da odgovara zahtevima za VT – 2 pregled.
Zaključak
Uspešno smo obavili inspekciju reaktorske glave u vreme remonta 2021. godine u Nuklearnoj elektrani Krško. Čitavu inspekciju smo obavili mobilnim robotom IVQ – DIGI, koji smo razvili u kompaniji Q Techna d.o.o. Napravili smo konstrukciju i modele i s tehnologijom 3D štampanja izradili kućište i sve komponente potrebne za mobilnog robota. Upotrebili smo DKMR mehanizam za vođenje robota. Sistem je prilagođen tako da smo primenili magnetske točkove i na taj način omogućili vožnju po neravnom terenu, jer prostor po kome se robot kreće ima gvozdenu podlogu. Prilagodili smo sve dimenzije mobilnog robota da bi mogao da se kreće u okruženju u kome se obavlja inspekcija. Morali smo da budemo oprezni da robot ne bi bio preširok ili previsok, jer bi to ometalo njegovo delovanje. Za lakše i robusnije delovanje smo također razvili i izradili grafički interfejs za mobilnog robota, koji smo upotrebljavali pri izvođenju vizuelne inspekcije na reaktorskoj glavi.
Literatura
[1] R. Siegwart, I. R. Nourbakhsh, D. Scaramuzza, Introduction to autonomous mobile robots, Mit press, London, 2011.
[2] K. Kozlowski, D. Pazderski, Modeling and control of a 4-wheel skid-steering mobile robot. International journal of applied mathematics and computer science 14(2004), pp. 1–4.








