CURSO 2022-2023
TÍTULO DEL PROYECTO: Desarrollo y prototipado de un mecanismo plano paralelo tipo 3-PRR para usos didácticos.

Convocatoria Prototipos orientados al mercado en TCUE

CURSO 2022-2023





Autor/a: Amador González Hidalgo
Tutor/a Académico: Andrés Sanz García
Colaboradoras: Armando González Muñoz

Esta
Junta
actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la
de Castilla y León
Partes de un robot
Centro de control
Es el encargado de coordinar el manipulador para que haga sus tareas sin necesidad de un individuo que lo controle. Este elemento puede puede ser reprogramable para que realice variastareas.
Manipulador
Es el encargado de realizar las acciones físicas que le indique el centro de control. Dependiendo de su morfología, se pueden clasificar en manipuladoresserieyparalelo.
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
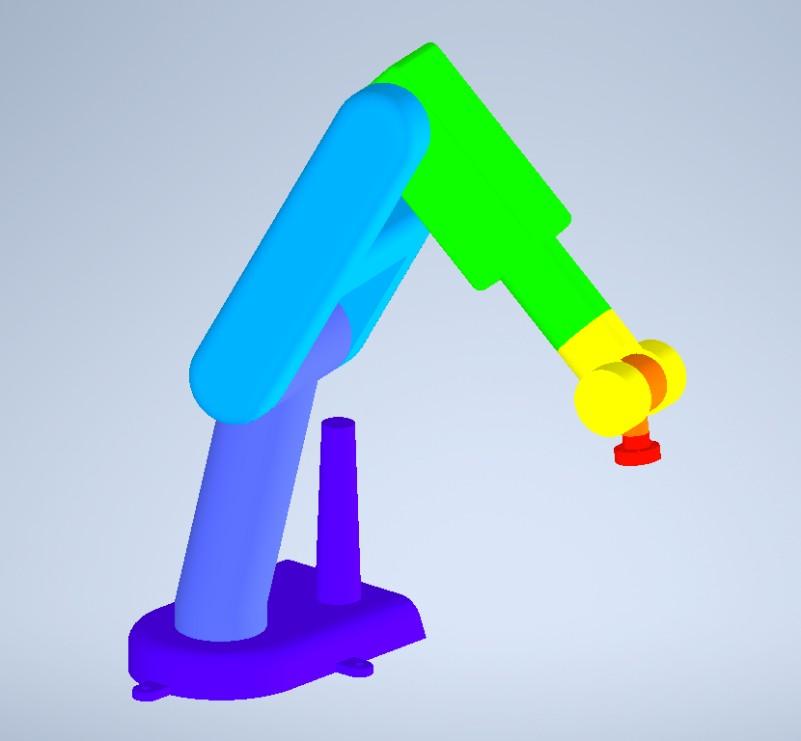
Manipuladores serie y paralelo
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
2022-2023
CURSO
Características y diferencias principales
Robot serie
• Granagilidad
• Versatilidad
• Granáreadetrabajo
• Grandesinercias
• Menosprecisos
Robot paralelo
• Granrobustez
• Pequeñasinercias
• Buenarelaciónvelocidad-precisión
• Áreadetrabajoreducida
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
CURSO 2022-2023
Esquema manipulador paralelo
Base del robot
Eslabón actuador
Eslabón intermedio
Eslabón efector
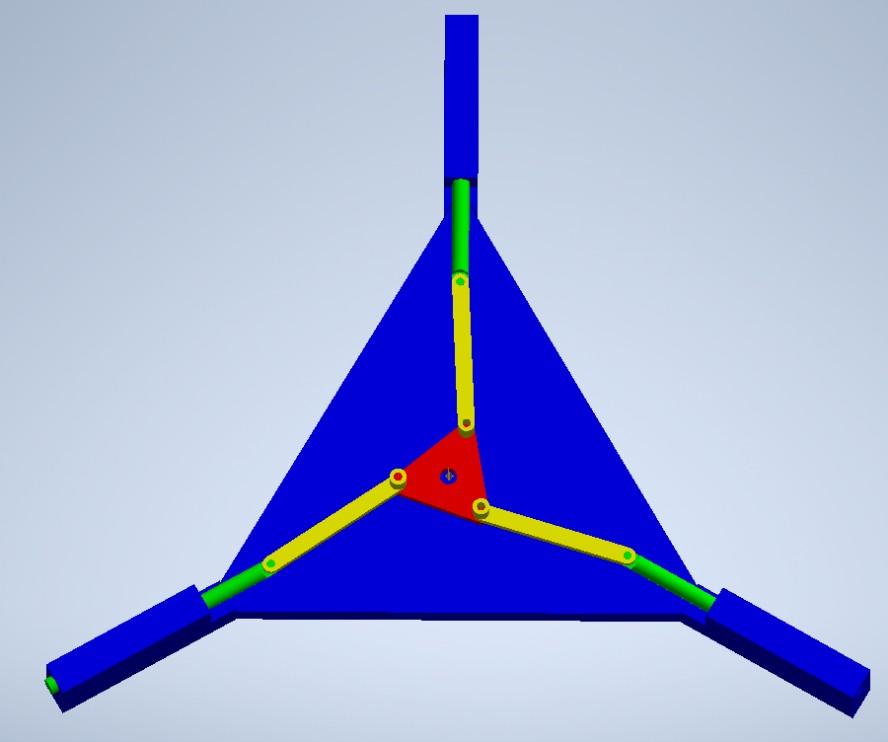
Ejemplo: Manipulador 3-PRR
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
Cinemática
de un robot paralelo: método algebraico
Cinemática inversa
Posición efector Cin. Inv Posición actuadores (sencilla de calcular)
Cinemática directa
Posición actuadores Cin. Dir Posición efector
(requiere de cálculos complejos)
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
Cinemática de un robot paralelo: método algebraico
Cinemática inversa
Var. Entrada Ecs. de movimiento despeje de var. de salida resultados, var. salida
Cinemática directa
Var. De salida Ecs. de movimiento Sistema de ecuaciones con variables en funciones trigonométricas Cambio de variable
Polinomio característico y raíces reales sol. de la variable
trigonométrica resultados, var. salida
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
Cinemática de un robot paralelo: método numérico
Cinemática inversa
Posiciónefector Modelonuméricoinverso Posiciónactuadores
Cinemática directa
Posiciónactuadores Modelonuméricodirecto Posiciónefector
Losmodelossonmuyparecidosentresi
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
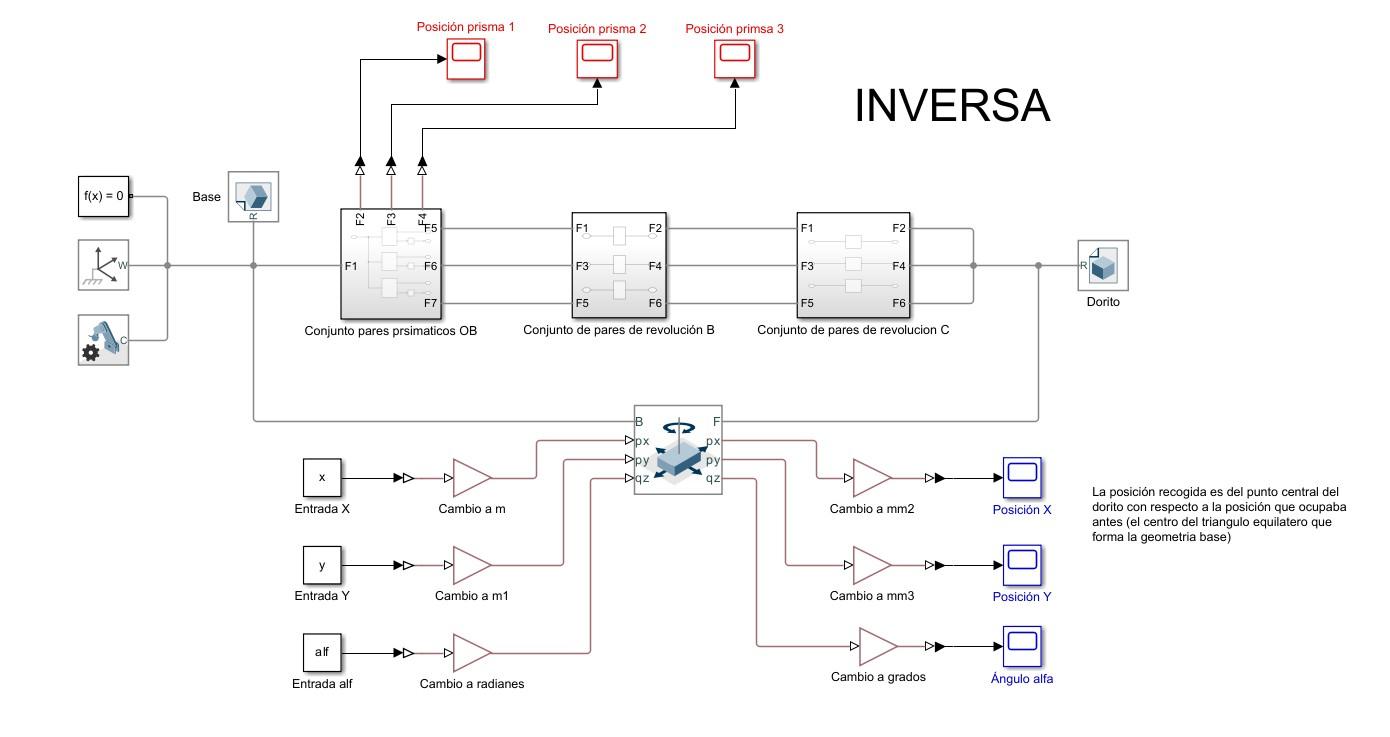
Cinemática de un robot paralelo: método numérico
Esquema en Simscape del modelo numérico inverso
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
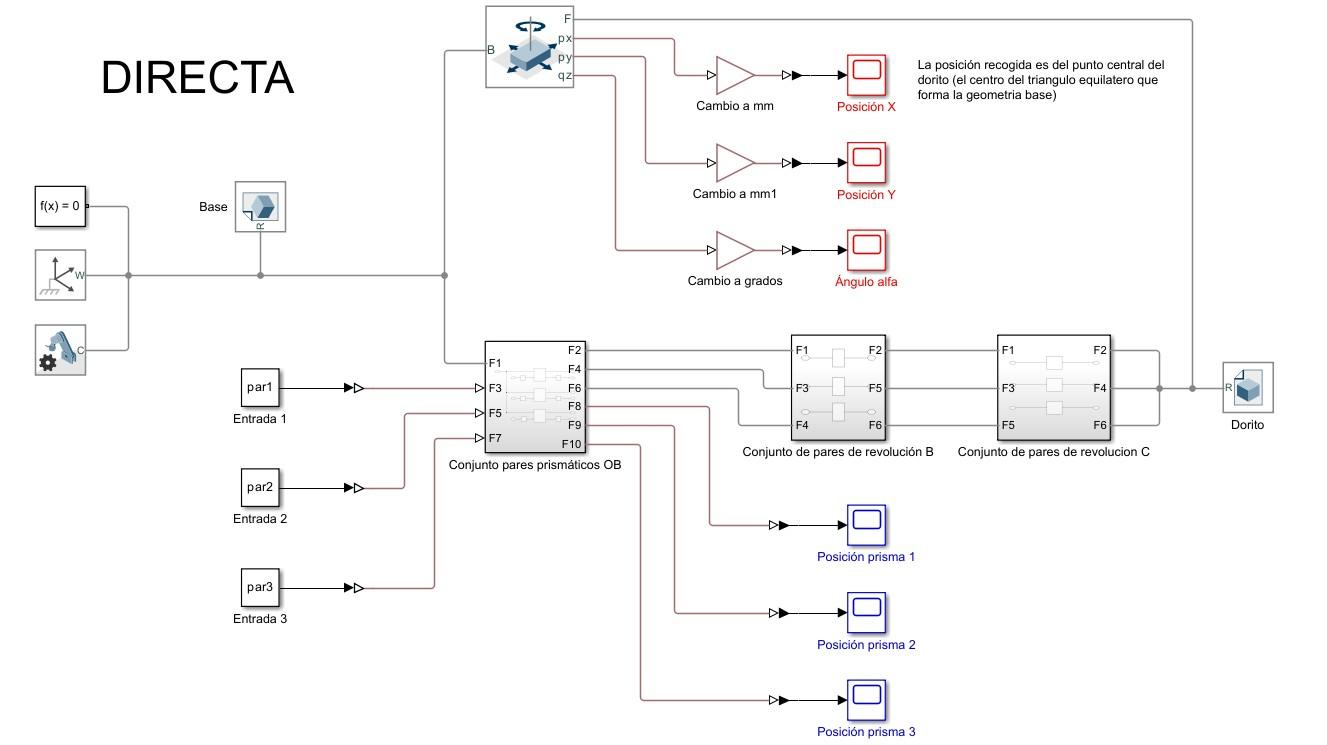
Cinemática de un robot paralelo: método numérico
Esquema en Simscape del modelo numérico directo
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
CURSO 2022-2023
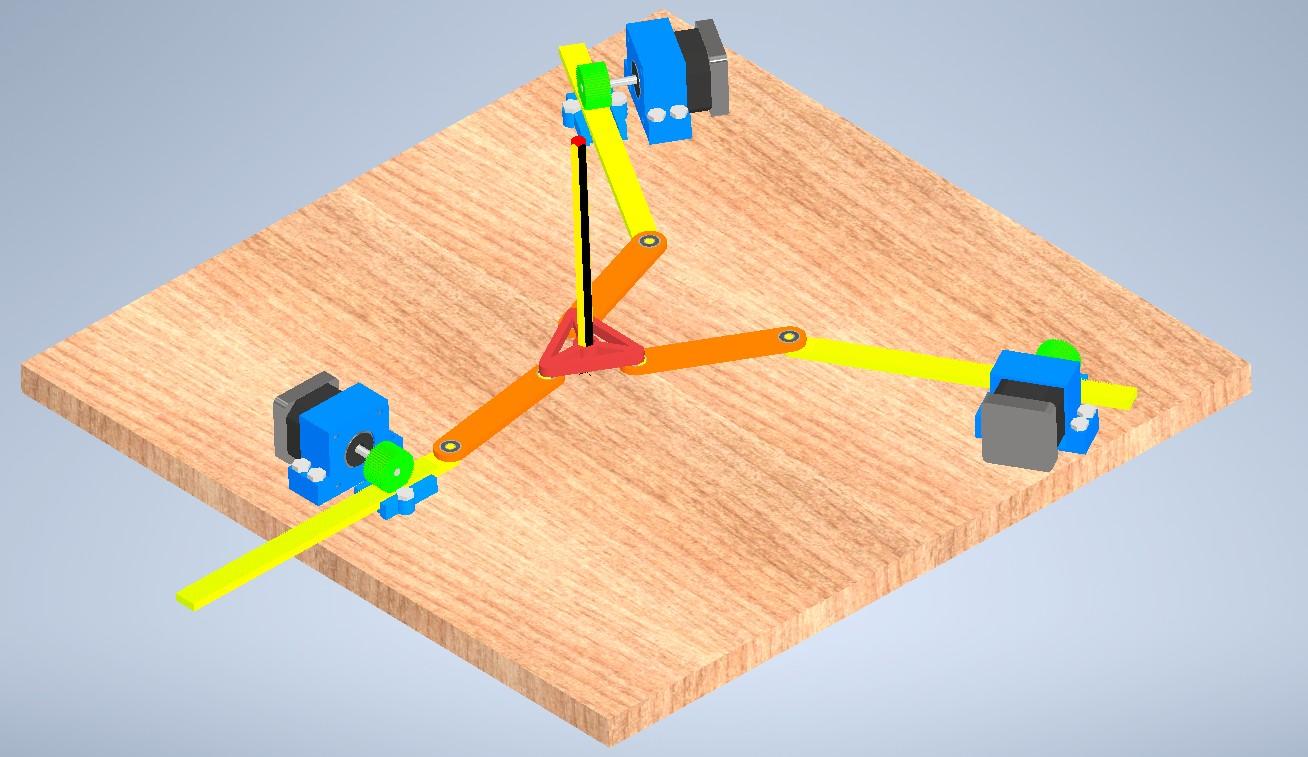
Diseño prototipo manipulador paralelo
Modelo del primer prototipo diseñado para el proyecto
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
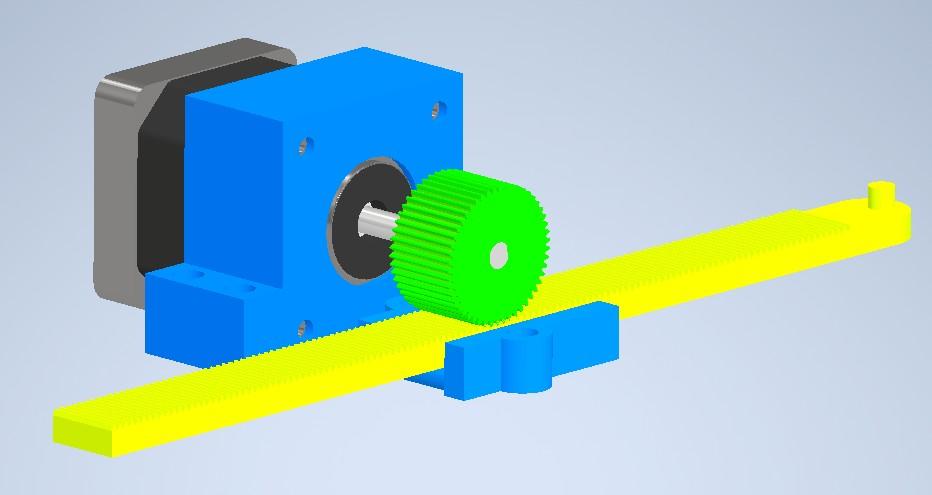
Diseño prototipo manipulador paralelo
Solución practica del par prismático
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
Diseño prototipo manipulador paralelo
Solución practica de la primera revolución
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
CURSO 2022-2023
Diseño prototipo manipulador paralelo
Solución práctica revolución 2 con ejemplo de posible herramienta (ploter)

Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
