
“Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León”


TITULO DEL PROYECTO: Actuador Open Source Integrado Basado en BLDC para Control Inteligente en Compliant Robotics y Vehículos Eléctricos


Autor/a: Federico López
Tutor/aAcadémico/a: Andrés Sanz

Colaboradores: Armando Gonzalez
1. Descripción General del Proyecto


OpenBLDC es una plataforma electrónica que permite a cualquier aficionado Maker controlar de forma sencilla la posición, velocidad y torque de un actuador eléctrico tipo BLDC. Este tipo de plataformas son cada vez más necesarias debido a la complejidad intrínseca de control de este tipo de motores, junto con la creciente demanda desuusograciasalasprestacionesquepresentanestos dispositivos.Losnuevosavancesenrobóticarequierendel uso de estos motores por lo que se estima que en los próximos años la demanda de sistemas de control para estosseacadavezsuperior.


2. Objetivos

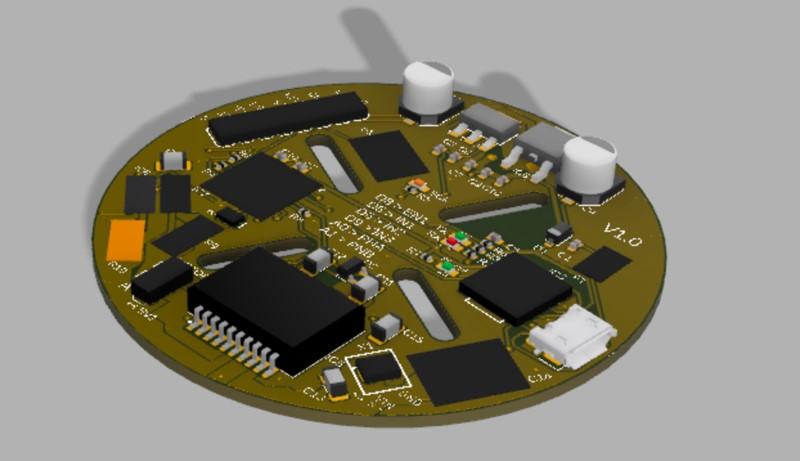
El objetivo principal del proyecto es el desarrollo del sistema electrónico que se compone de una unidad microcontrolador, un sensor de posición magnético de efecto Hall, un inversor trifásico y un puerto de comunicaciones. Una vez prototipado este dispositivo, la meta se encontrará en integrar el mismo dentro de un sistemamotor-controlador-reductorquecontengatodoslos elementos necesarios para su utilización en un robot colaborativoreal.

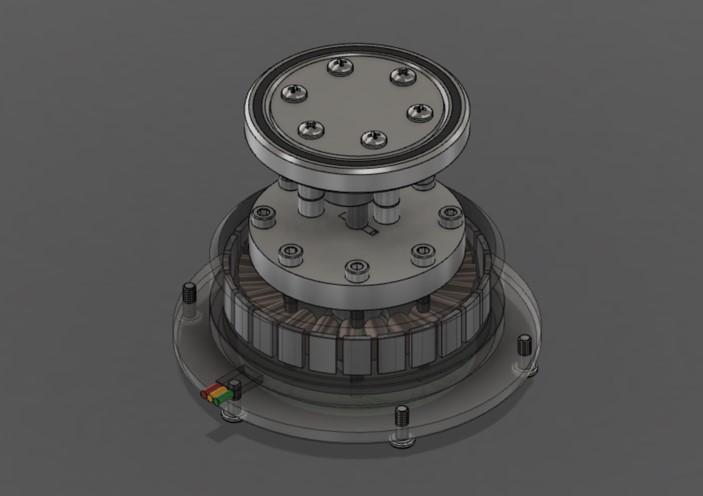
3. Resultados obtenidos (aplicabilidad)

Finalmente, la aplicación de este dispositivo se llevará a cabo sobre el brazo robótico de la figura con el fin de controlar la posición, velocidad y par de cada una de las articulaciones que componen el manipulador robótico.

 CURSO 2022-2023
CURSO 2022-2023