
“Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León”


TITULO DEL PROYECTO:



MEJORADELAEXPERIENCIAYDE
LA PERCEPCIÓN DESENSACIONES REALESEN ELENTRENAMIENTO/ ADQUISICIÓNDEDESTREZASDECONDUCCIÓNENSIMULADORES
Autor/a: Carlos Izquierdo Martín
Tutor/a Académico/a: Miguel Ángel Lorenzo Fernández y Roberto
José García Martín
Colaboradores: CarlosArias Rodríguez y Alberto Fiz del Teso
1. Descripción General del Proyecto
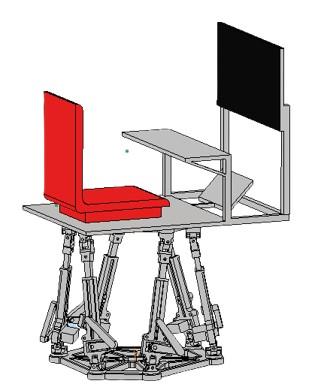
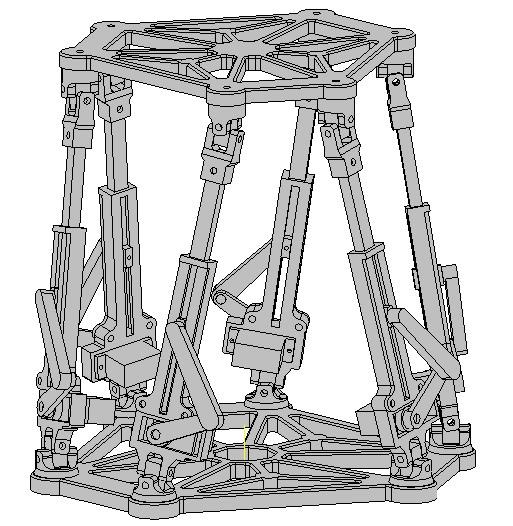
Este proyecto trata del análisis y aplicación de un robot a la generación de movimiento en los simuladores de conducción. Se ha elegido la Plataforma Stewart-Gough, unrobotindustrialdetipoparaleloaplicadoprincipalmente en simuladores de vuelo, rehabilitación de tobillos y máquinas herramientas. Además, se pretende construir el prototipo del robot a través de la impresión aditiva implementando un enlace de control entre el entorno virtualyelrealatravésdeunaplacadeArduino.

2. Objetivos
Losobjetivosparcialesson:

Análisisdeposición,cinemáticoydinámico.
Programación de los análisis en Wolfram Mathematica.
Diseño, construcción y simulación de un modelo virtualdelaplataformaenAutodeskInventor.
Adaptacióndelmodelovirtualalprototipo.
Fabricacióndelprototipo.
3. Resultados obtenidos (aplicabilidad)
Una vez llevado a cabo todo el estudio se realizaron algunas modificaciones respecto al modelo virtual, principalmente debidas a lautilización de pasadores Lego en las revoluciones del mecanismo biela-manivela y a la creación de una unión esférica a partir de una bola comercial. Las conexiones entre los servomotores y la placa de Arduino se han llevado a cabo a través de una protoboard.
 CURSO 2022-2023
CURSO 2022-2023