 Drive Controlled Pump
Drive Controlled Pump
Installationshandbuch DCP3
Handbuch
Das Installationshandbuch enthält nur die wichtigsten Informationen.
Detaillierte Informationen entnehmen Sie bitte dem Benutzerhandbuch HA501718U002 auf der Website www.parker.com/ssd (Literatur/Installationsanleitungen).
ACHTUNG — VERANTWORTUNG DES ANWENDERS
VERSAGEN ODER UNSACHGEMÄßE AUSWAHL ODER UNSACHGEMÄßE VERWENDUNG DER HIERIN BESCHRIEBENEN PRODUKTE ODER ZUGEHÖRIGER TEILE KÖNNEN TOD, VERLETZUNGEN VON PERSONEN ODER SACHSCHÄDEN VERURSACHEN.
Dieses Dokument und andere Informationen der Parker-Hannifin Corporation, ihren Tochtergesellschaften und Vertragshändlern enthalten Produkt- oder Systemoptionen zur weiteren Untersuchung durch Anwender mit technischen Kenntnissen.
Der Anwender ist durch eigene Untersuchung und Prüfung allein dafür verantwortlich, die endgültige Auswahl des Systems und der Komponenten zu treffen und sich zu vergewissern, dass alle Leistungs-, Dauerfestigkeits-, Wartungs-, Sicherheits- und Warnanforderungen der Anwendung erfüllt werden. Der Anwender muss alle Aspekte der Anwendung genau untersuchen, geltenden Industrienormen folgen und die Informationen in Bezug auf das Produkt im aktuellen Produktkatalog sowie alle anderen Unterlagen, die von Parker oder seinen Tochtergesellschaften oder Vertragshändlern bereitgestellt werden, zu beachten. Soweit Parker oder seine Tochtergesellschaften oder Vertragshändler Komponenten oder Systemoptionen basierend auf technischen Daten oder Spezifikationen liefern, die vom Anwender beigestellt wurden, ist der Anwender dafür verantwortlich festzustellen, dass diese technischen Daten und Spezifikationen für alle Anwendungen und vernünftigerweise vorhersehbaren Verwendungszwecke der Komponenten oder Systeme geeignet sind und ausreichen.
Verkaufs-Angebot
Wenden Sie sich bitte wegen eines ausführlichen Verkaufs-Angebotes an Ihre Parker-Vertretung.
DCP Handbuch innen A4 DE NEU.indd 31.01.17 2
Drive Controlled Pump Parker Hannifin Corporation Hydraulics Group
Drive Controlled Pump
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 3 Handbuch Inhalt Seite Sicherheit 5 Einführung Erste Schritte • Installation • Programmierung (Parker Drive Quicktool) – PC-Programmier-Tool • Anforderungen an den PC • Programmierung Keypad 7 7 7 7 7 7 Nennleistungen 8 Aufbau 9 Einbau • Schaltschrankmontage 10 10 Montage • Montage des Antriebs • Belüftung • Montagehalterungen • Durchsteckmontage • Details zur Durchsteckmontage (alle Baugrößen) • Halterung für Steuer- und Netzkabel 10 10 10 11 12 13 14 Installation • Hinweise zur Verdrahtung • Spannungsversorgungsanschlüsse • Leistungsanschlüsse • Entfernen der Steuermodulabdeckung • Entfernen des Steuermoduls 15 15 15 15 16 16 Steuerungsanschlüsse • Eingänge – Analog (DCP3xxxA) • Eingänge – Feldbus (DCP3xxxC/D/E/P/N/T) • Steuer Wort (2021) • Ausgänge – Analog (DCP3xxxA) • Ausgänge – Feldbus (DCP3xxxC/D/E/P/N/T) 17 18 18 18 19 19 Optionskarten • Analog Eingänge • Pulse Encoder und Motorthermisor 20 21 21 Ethernet (Netzwerkanbindung) • Einführung • Anschluss an ein Netzwerk • Statusüberwachung • IP-Adresse einstellen • Manuelle Einstellung der IP-Adresse • Automatische Zuweisung einer IP-Adresse mit DHCP • Automatische Zuweisung einer IP-Adresse mit Auto-IP • Werkseinstellung (gemeinsame Verwendung von DHCP und Auto-IP) 23 23 23 23 23 24 24 24 24 Profibus Kommunikation mit Siemens S7 • Zyklische Kommunikation • Azyklische Kommunikation 25 25 25
Handbuch
Drive Controlled Pump
DCP Handbuch innen A4 DE NEU.indd 31.01.17 4
Parker Hannifin Corporation Hydraulics Group
Inhalt Seite STO Funktionsbeschreibung • Sicher abgeschaltetes Moment (STO) SIL3/PLe • Allgemeine Informationen • STO-Klemmenanschlüsse • Wahrheitstabelle • Applikationen ohne STO-Funktion • Anwendungen (Applikationen) • Beschreibung • Eigenschaften • Anforderungen • Volumenstromregelung (Q Control) • Druckregelung (p Control) • Volumenstromregelung mit überlagerter Druckregelung (p/Q Control) 28 28 28 29 29 30 30 30 30 30 31 31 31 Grafisches Keypad • Montage eines dezentralen GKP • Display • Tastenfunktionen • Anzeige der Softkey-Aktionen • Menüübersicht 32 32 33 33 34 35 Parker Drive Quicktool (PDQ) PC-Software • Installation • Starten • Antrieb konfigurieren 37 37 38 38 Parameterbeschreibung 44 Parameterliste 51 Störungen und Fehlerbehebung 54 Technische Daten • Umgebungsbedingungen • Erdungssicherheit • Elektrische Nennwerte (400-V-Ausführung) • Eingangssicherung • Interner Bremschopper • Analoge Ein-/Ausgänge • Digitale Eingänge • Digitale Ausgänge 59 59 59 60 60 64 65 65 66 Antrieb konfigurieren • Quick Setup • Setzen der Motordaten • Motortyp • Motortypenschild • Setzen Ein- und Ausgänge • Kommunikation 67 67 68 68 68 68 68 Antrieb in Betrieb nehmen • Signalcheck durchführen 69 69
Handbuch
Sicherheit
Sicherheitshinweise
Lesen Sie vor Installation und Betrieb des Geräts bitte diese wichtigen Sicherheitshinweise.
VORSICHT
Vorsichtshinweise in diesem Handbuch warnen vor Schäden am Gerät.
Anforderungen
Anwender-Zielgruppe
Dieses Handbuch richtet sich an alle Personen, die das beschriebene Gerät installieren, konfigurieren oder bedienen müssen oder damit verbundene Aufgaben zu erfüllen haben.
Das vorliegende Kapitel enthält Sicherheitshinweise und soll einen optimalen Betrieb des Geräts für den Anwender gewährleisten.
Tragen Sie in die nachstehende Tabelle alle relevanten Informationen zur Installation und Verwendung des Geräts ein, die Ihnen später als Referenz dienen können.
Modell-Nr.
(siehe Produktbeschriftung)
Geräteverwendung:
(siehe Zertifizierung)
Gefahren
Komponente
Hauptgerät
WARNING




Warnhinweise in diesem Handbuch weisen auf Verletzungsgefahr hin.
Anwendungsbereich
Das beschriebene Gerät wurde zur Drehzahlregelung für industrielle Wechselstrom-Induktionsmotoren und Permanentmagnet-Wechselstrom-Synchronmotoren entwickelt.
Personal
Installation, Betrieb und Wartung des Geräts dürfen ausschließlich von qualifiziertem Personal durchgeführt werden. Eine qualifizierte Person verfügt über die erforderlichen technischen Kenntnisse und ist mit allen geltenden Sicherheitsbestimmungen und relevanten Sicherheitsvorkehrungen, dem Installationsprozess, dem Betrieb und der Wartung des Geräts sowie mit allen damit verbundenen Gefahren vertraut.
Installationshinweise
Installationsort
(relevant für Sie)
Gerätemontage:
Schaltschrankmontage
Durchsteckmontage
GEFAHR! - Die Nichtbeachtung der folgenden Hinweise kann Körperverletzungen zur Folge haben.
1. Dieses Gerät kann durch den Kontakt mit frei rotierenden Geräteteilen und hoher Spannung lebensgefährlich sein.
2. Das Gerät muss aufgrund des hohen Erdfehlerstroms permanent geerdet und der Antriebsmotor mit einer geeigneten Schutzerde verbunden sein.
3. Prüfen Sie vor jedem Eingriff in das Gerät die ordnungsgemäße Isolierung aller Spannungsanschlüsse. Vergessen Sie nicht, dass der Antrieb über mehrere Spannungsanschlüsse verfügen kann.
4. An den Leistungsklemmen (Motorausgang, Spannungseingänge, DC-Bus und Bremse, sofern zutreffend) liegt auch bei Motorstillstand bzw. -halt ggf. noch Spannung an.
5. Verwenden Sie für Messungen ausschließlich ein Messgerät nach IEC 61010 (ab CAT III). Beginnen Sie immer mit dem höchsten Bereich. Messgeräte der Kategorien CAT I und CAT II dürfen für dieses Produkt nicht verwendet werden.


6. Warten Sie mindestens 5 Minuten, bis eine ausreichende Entladung der Motorkondensatoren auf ein sicheres Spannungsniveau (< 50 V) gewährleistet ist. Prüfen Sie mit dem angegebenen Messgerät, das Messungen bis zu 1.000 VDC/VAC eff unterstützen muss, ob zwischen allen Leistungsklemmen sowie zwischen Leistungsklemmen und Erdung weniger als 50 V anliegen.
7. Sofern nicht anders angegeben, darf dieses Gerät NICHT zerlegt werden. Bei einer Betriebsstörung ist der Antrieb zurückzusenden.
Drive Controlled Pump Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 5
Gefahr durch Stromschlag WARNUNG Heiße Oberflächen Vorsicht Siehe Dokumentation Erdleiter/Masse Schutzleiterklemme
GEFAHR
Handbuch
Die Nichtbeachtung der folgenden Hinweise kann Körperverletzungen oder Geräteschäden zur Folge haben.
Wenn EMV- und Sicherheitsanforderungen nicht vereinbar sind, erhält stets die Sicherheit des Personals Priorität.
Sicherheit
• Führen Sie niemals Hochspannungswiderstandsprüfungen an Leitungen durch, ohne den Antrieb zuvor von dem zu prüfenden Stromkreis zu trennen.
• Sehen Sie unter Gewährleistung einer ausreichenden Lüftung Schutzvorrichtungen und/oder zusätzliche Sicherheitssysteme vor, um Körperverletzungen und Geräteschäden zu vermeiden.
• Beim Austausch eines Antriebs in einer Anwendung und vor der erneuten Inbetriebnahme muss auf jeden Fall sichergestellt werden, dass alle benutzerdefinierten Betriebsparameter ordnungsgemäß installiert wurden.
• Alle Steuer- und Signalklemmen garantieren sicherheitskleinspannungen (SELV), d. h. sie sind durch eine doppelte Isolierung geschützt. Vergewissern Sie sich, dass die gesamte externe Verdrahtung für die höchste Systemspannung zugelassen ist.
• Für im Motor enthaltene Thermofühler muss mindestens eine Basisisolierung sichergestellt werden.
• Alle im Wechselrichter frei liegenden Metallteile sind durch eine Basisisolierung geschützt und mit der Schutzerde verbunden.
Aus- und Einbauen des Steuergeräts
• Der Einsatz von Fehlerstromschutzschaltern (RCD) in Verbindung mit diesem Gerät wird nicht empfohlen. Sind sie dennoch erforderlich, sollte nur ein RCD des Typs B eingesetzt werden.
EMV
• Im Wohnbereich kann dieses Gerät Funkstörungen verursachen. In diesem Fall sind zusätzliche Schutzmaßnahmen zu ergreifen.
• Dieses Gerät enthält Teile, die empfindlich auf elektrostatische Entladungen (ESD) reagieren. Es sind deshalb Vorkehrungen zu treffen, die bei der Handhabung, Installation und Wartung dieses Geräts die Bildung elektrostatischer Ladung begrenzen.
• Dieses Gerät gehört der Produktklasse „für eingeschränktem Vertrieb“ gemäß IEC 61800-3 an. Es ist als „professionelles Gerät“ nach EN 61000-3-2 ausgewiesen. Vor dem Anschluss an eine Niederspannungsversorgung ist die Genehmigung des Stromversorgers einzuholen.
Trennen Sie das Gerät vom Netz, ehe Sie das Steuergerät vom Leistungsteil abziehen oder in diesen einstecken.
VORSICHT!
Gefahr für die Anwendung
• Die in diesem Dokument beschriebenen technischen Daten, Prozesse und Schaltungen sind lediglich als globale Anleitung gedacht und erweisen sich u. U. als nicht geeignet für die spezifische Anwendung des Benutzers. Wir können keinesfalls die Eignung des in diesem Handbuch beschriebenen Geräts für bestimmte Anwendungen garantieren.
Risikobeurteilung
Im Fehlerzustand, bei Spannungsverlust oder unbeabsichtigten Betriebsbedingungen funktioniert der Antrieb unter Umständen nicht erwartungsgemäß. Insbesondere gilt:
• Die gespeicherte Energie wird nicht so schnell wie angegeben bis zu einem sicheren Niveau entladen und kann selbst dann noch vorhanden sein, wenn der Antrieb scheinbar vollständig ausgeschaltet ist.
• Die Drehrichtung des Motors lässt sich ggf. nicht regeln.
• Die Motordrehzahl kann ggf. nicht geregelt werden.
• Der Motor kann u. U. erregt werden.
Ein Antrieb ist eine Komponente innerhalb eines Antriebssystems, die den Betrieb bzw. die Wirkung des Systems im Fehlerzustand beeinflussen kann. Berücksichtigen Sie deshalb stets folgende Aspekte:

• Gespeicherte Energie
• Getrennte Spannungsanschlüsse
• Sequenzierungslogik
• Unbeabsichtigter Betrieb
Drive Controlled Pump Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 6
Handbuch
Einführung
Erste Schritte
Planen Sie die folgenden Aufgaben unter Verwendung des Handbuchs:
Installation
Machen Sie sich mit den Anforderungen vertraut:
• Zertifizierungsanforderungen, CE/UL/CUL-Konformität
• Konformität mit örtlichen Installationsanforderungen
• Anforderungen an Versorgung und Verkabelung
Programmierung (Parker Drive Quicktool) –PC-Programmier-Tool
Machen Sie sich mit der Anwendung vertraut:
• Installieren Sie das Parker Drive Tool Quick (PDQ) von der Website www.parker.com/ssd/pdq.
• Schließen Sie ihren PC über Ethernet an Antrieb an.
• Nehmen Sie Ihren Antrieb mit dem PDQ Assistenten in Betrieb.
Anforderungen an den PC
Mindestanforderung an das System :
• 1 GB RAM
• 1 GHz Pentium
• 1 GB freier Festplattenspeicher
• 1024x768 Bildschirmauflösung
• Betriebssysteme:
• Windows XP
• Windows Vista (32 Bit)
• Windows 7 (32 und 64 Bit)
• Windows 8 (32 und 64 Bit)
Drive Controlled Pump
DCP Handbuch innen A4 DE NEU.indd 31.01.17 7
Parker Hannifin Corporation Hydraulics Group
Handbuch
Drive Controlled Pump
DCP Handbuch innen A4 DE NEU.indd 31.01.17 8
Parker Hannifin Corporation Hydraulics Group
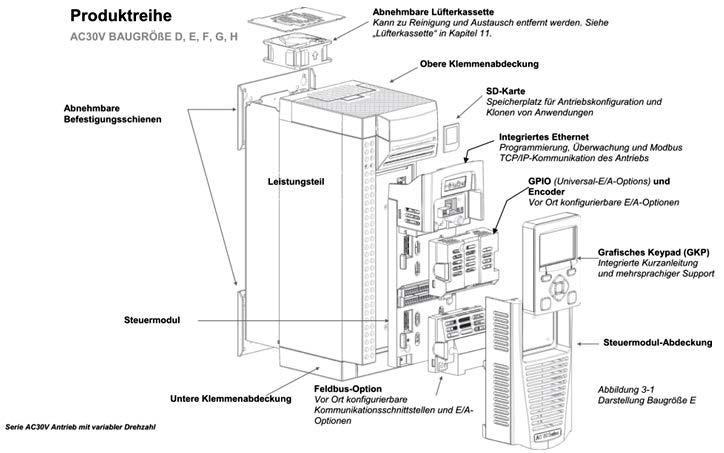
Nennleistungen Bestellschlüssel Normalbetrieb Überlastbetrieb Baugröße kW Ausgangsstrom Aeff kW Ausgangsstrom Aeff 400 VAC 400 VAC DCP3 3P5 1,1 3,5 0,75 2,5 D DCP3 4P5 1,5 4,5 1,1 3,5 D DCP3 5P5 2,2 5,5 1,5 4,5 D DCP3 7P5 3 7,5 2,2 5,5 D DCP3 010 4 10 3 7,5 D DCP3 012 5,5 12 4 10 D DCP3 016 7,5 16 5,5 12 E DCP3 023 11 23 7,5 16 E DCP3 032 15 32 11 23 F DCP3 038 18 38 15 32 F DCP3 045 22 45 18 38 G DCP3 060 30 60 22 45 G DCP3 073 37 73 30 60 G DCP3 087 45 87 37 73 H DCP3 105 55 105 45 87 H DCP3 145 75 145 55 105 H DCP3 180 90 180 75 145 J DCP3 205 110 205 90 180 J DCP3 260 132 260 110 205 J DCP3 380 200 380 160 315 K DCP3 440 250 440 200 380 K DCP3 315 160 315 132 260 K Aufbau
Handbuch
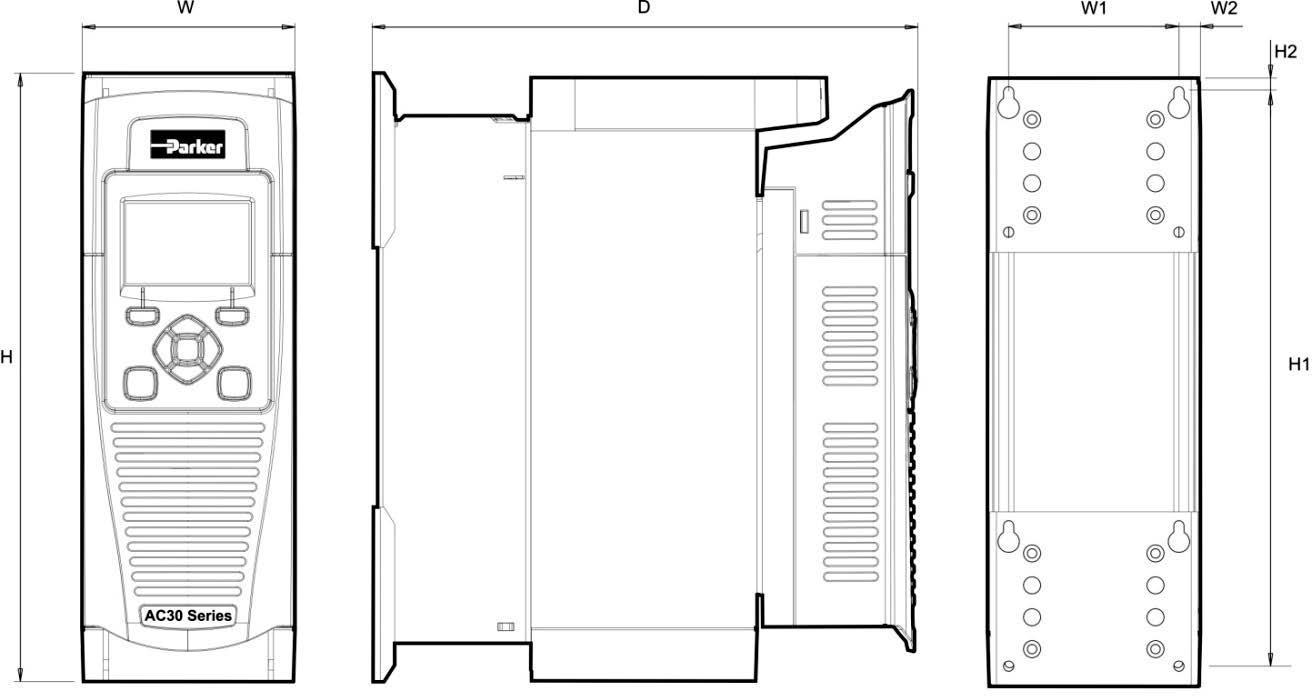
Einbau
Schaltschrankmontage
Mechanische Abmessungen für den AC30V Antrieb Darstellung von Baugröße D
Drive Controlled Pump
Serie AC30V Antrieb mit variabler Drehzahl
Alle Maße in mm
DCP Handbuch innen A4 DE NEU.indd 31.01.17 9
Parker Hannifin Corporation Hydraulics Group
Modelle Max. Gewicht H H1 H2 W W1 W2 D Befestigungen Baugröße D 4,5 kg 286 270 6,5 100 80 10 255 Schlitz 4,5 mm breit M4Schrauben verwenden Baugröße E 6,8 kg 333 320 6,5 125 100 12,5 255 Baugröße F 10,0 kg 383 370 6,5 150 125 12,5 255 Baugröße G 22,3 kg 480 465 7,25 220 190 13 287 Schlitz 5,5 mm breit M5Schrauben verwenden Baugröße H 42,8 kg 670 650 10 260 220 20 316 Schlitz 6,8 mm breit M6Schrauben verwenden Baugröße J 89,0 kg 800 780 10 330 285 23 374 Schlitz 9,0 mm breit M8Schrauben verwenden Baugröße K 125 kg 1310 1282 15 400 280 60 457 M10-Schrauben verwenden
Handbuch
Montage
Montage des Antriebs
Diese Geräte sind nicht geeignet für die Wandmontage. Sie müssen vertikal in einem zusätzlichen Gehäuse montiert werden.
Hinweis: Nur Baugröße H, J und K
Aufgrund des Gewichtes sollten Sie zum Einbau und Heben von Geräten dieser Baugröße auf mechanische Hilfsmittel zurückgreifen oder eine zweite Person hinzuziehen. Das Gerät wird vertikal auf einer ebenen Montageplatte montiert.
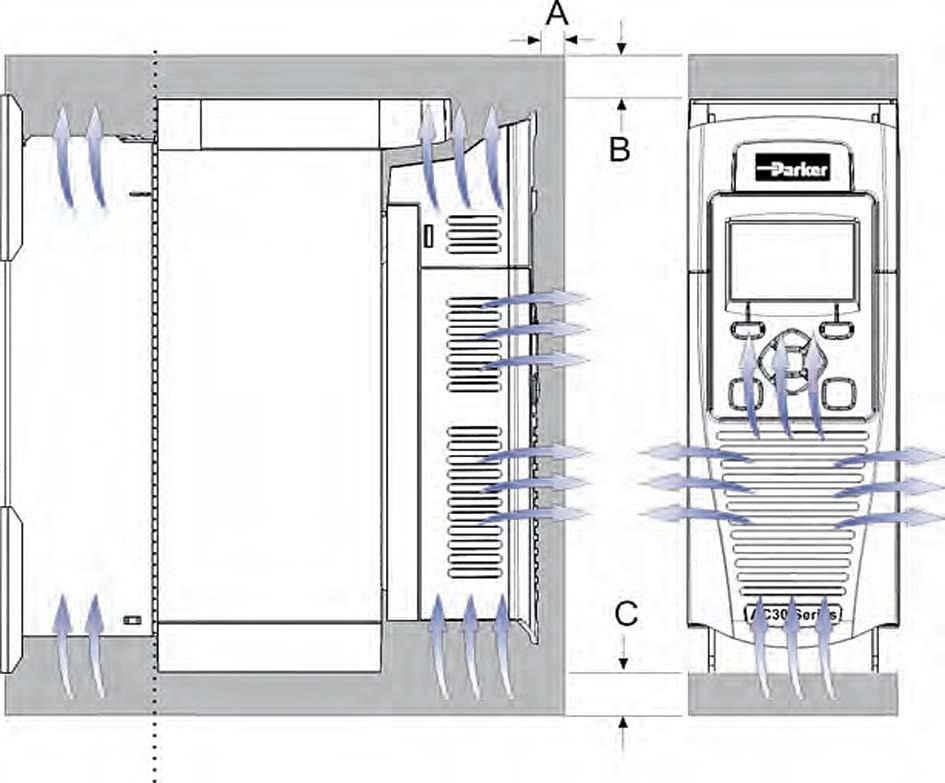
Belüftung
Der Antrieb strahlt beim Normalbetrieb Wärme ab und muss daher so angebracht werden, dass der Luftstrom durch die Belüftungsschlitze und den Kühlkörper nicht behindert wird. Halten Sie die in den folgenden Tabellen angegebenen Mindestabstände für die Belüftung ein, um zu gewährleisten, dass der Antrieb angemessen gekühlt wird und dass von anderen benachbarten Geräten abgestrahlte Wärme nicht auf das Gerät übertragen wird. Beachten Sie gegebenenfalls die vorgeschriebenen Abstände der anderen Geräte. Wenn zwei oder mehr AC30V Antriebe nebeneinander angebracht werden, sind die Abstände zu addieren. Die Montageoberfläche muss im Normalfall kalt sein.
Mindestbelüftungsabstand
Baugröße D, E, F, G H, J und K
Produkt/Anwendung bei Schaltschrankmontage
(Europa: IP2x, USA/Kanada: Open Type).
Der Antrieb muss in einem geeigneten Schaltschrank installiert werden.
Kühlkörper
Isolierte Fremdbelüftung Natürliche Belüftung (nicht für Baugröße D bis G)
Belüftungsabstand für Produkt/Anwendung bei Schaltschrankmontage, Darstellung Baugröße D.
Abstände für Produkt mit Schutzart IP20 (mm)
A B C
Baugröße D–H 10 75 75 Minimum (ohne Verkabelungsaufwand)
Baugröße J 10 100 100 Minimum (ohne Verkabelungsaufwand)
Baugröße K 10 200 200
Controlled Pump Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 10
Drive
Handbuch
Montagehalterungen Baugrößen D, E, F und G
Drive Controlled Pump
Die Halterungen können unter Verwendung der alternativen Löcher, die in Abständen von 15 mm angeordnet sind, nach oben/unten versetzt werden.
Details zur Schaltschrankmontage (alle Baugrößen)
Serie AC30V Antrieb mit variabler Drehzahl
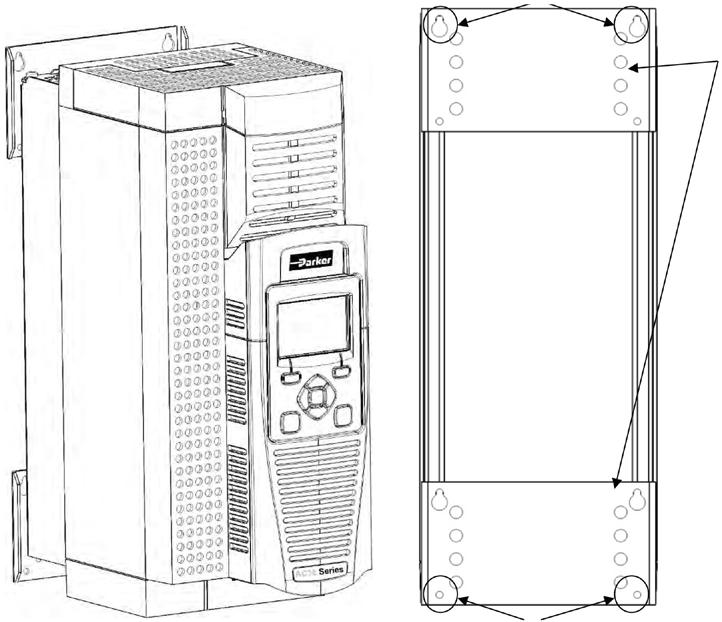
Rückansicht mit Befestigungslöchern zur Schaltschrankmontage
Befestigungsöffnungen
Anmerkung: Baugröße H, J und K haben eine durchgehende Montageplatte, die nicht verschiebbar ist.
DCP Handbuch innen A4 DE NEU.indd 31.01.17 11
Parker Hannifin Corporation Hydraulics Group
Handbuch
Durchsteckmontage
Drive Controlled Pump
Bei der Durchsteckmontage von Antrieben können kleinere Schaltschränke verwendet werden, weil ein Großteil der vom Antrieb erzeugten Wärme außerhalb des Schaltschranks abgeführt wird.
Mechanische Abmessungen für Durchsteckmontage des AC30V Antriebs- Baugröße D, E, F, G, H und J
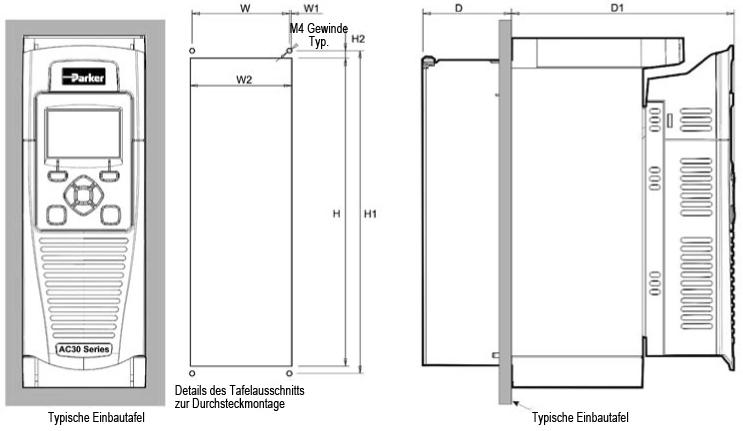
Alle Maße in mm
Hinweis: Durchsteckmontage ist für Baugröße K nicht möglich.
DCP Handbuch innen A4 DE NEU.indd 31.01.17 12
Parker Hannifin Corporation Hydraulics Group
Baugröße H H1 H2 W W1 W2 D D1 Befestigungen D 250 262 6 79 1,5 82 72 181 M4-Schrauben verwenden E 297 309 6 102 1 104 72 181 F 347 359 6 127 1 129 72 181 G 440 455,8 7,9 195 0,4 195,8 95 190 M5-Schrauben verwenden H 617 641 12 218 4,5 227 99 211 M6-Schrauben verwenden J 745 765 10 275 12,5 300 128 242,6
Handbuch
Details zur Durchsteckmontage (alle Baugrößen)
Um die Montage zu ermöglichen, zunächst den Antrieb unter Befolgung der Schritte 1 bis 4 zerlegen. Anschließend die Schritte 5 bis 7 zur Montage befolgen:
1. Die Montagehalterungen losschrauben und abnehmen.
2. Die Abdeckung des Steuerteils abnehmen.
3. Das Steuerteil ausbauen.
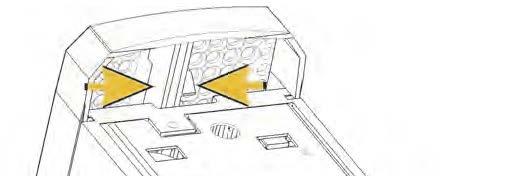
4. Anweisungen zum Ausbau der oberen und unteren Abdeckung.
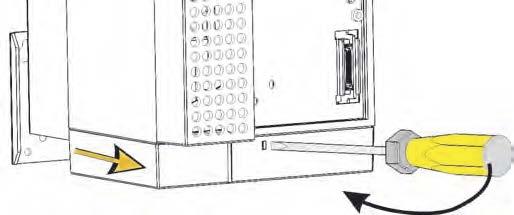
Nur Baugröße D
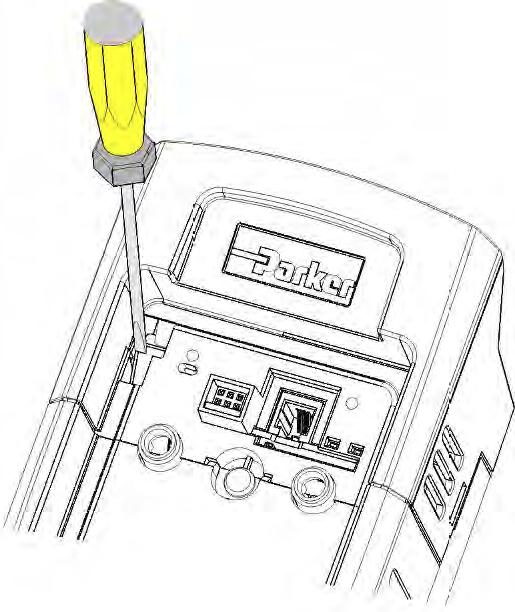
Obere Abdeckung: Die Halterung unter der oberen Abdeckung zusammendrücken und die Abdeckung abheben.
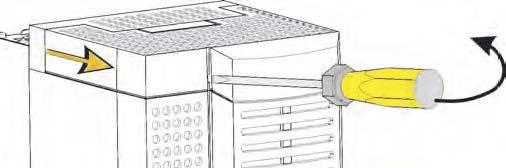
Untere Abdeckung: Einen Schraubendreher in den Schlitz einführen und leicht nach links drücken, um die Verriegelung zu lösen.
Baugrößen E, F, G, H und J
Obere Abdeckung:
Einen Schraubendreher in den Schlitz einführen und nach rechts bewegen, um die Verriegelung zu lösen. Anschließend die Abdeckung herunterschieben.
Untere Abdeckung:
Einen Schraubendreher in den Schlitz einführen und nach links bewegen, um die Verriegelung zu lösen. Anschließend die Abdeckung herunterschieben.
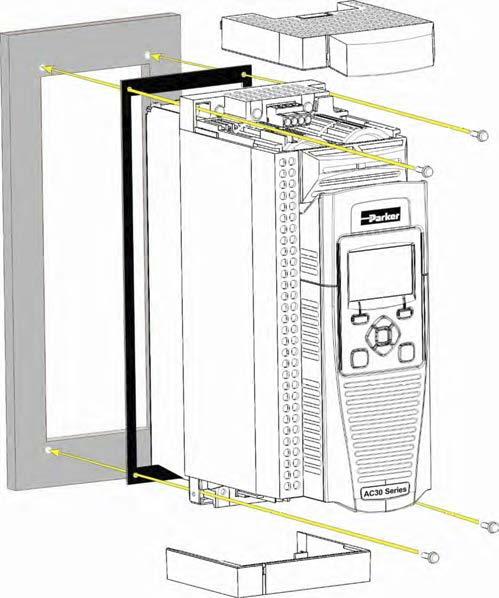
5. Eine Dichtung so um den Antrieb herum anbringen, dass der Freiraum zwischen Antrieb und Tafel luftdicht versiegelt ist. Dichtungen sind unter den folgenden Teilenummer n bei Parker erhältlich:

Baugröße D – LA502668
Baugröße E – LA502669
Baugröße F – LA502670
Baugröße G – LA502471
Baugröße H – LA502472
Baugröße J – LA502793
6. Wie gezeigt, sämtliche Schrauben an Ort und Stelle fest anziehen.
7. Jetzt können die Stromkabel angeschlossen werden.
Parker Hannifin Corporation
Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 13
Drive Controlled Pump
Hydraulics
Handbuch
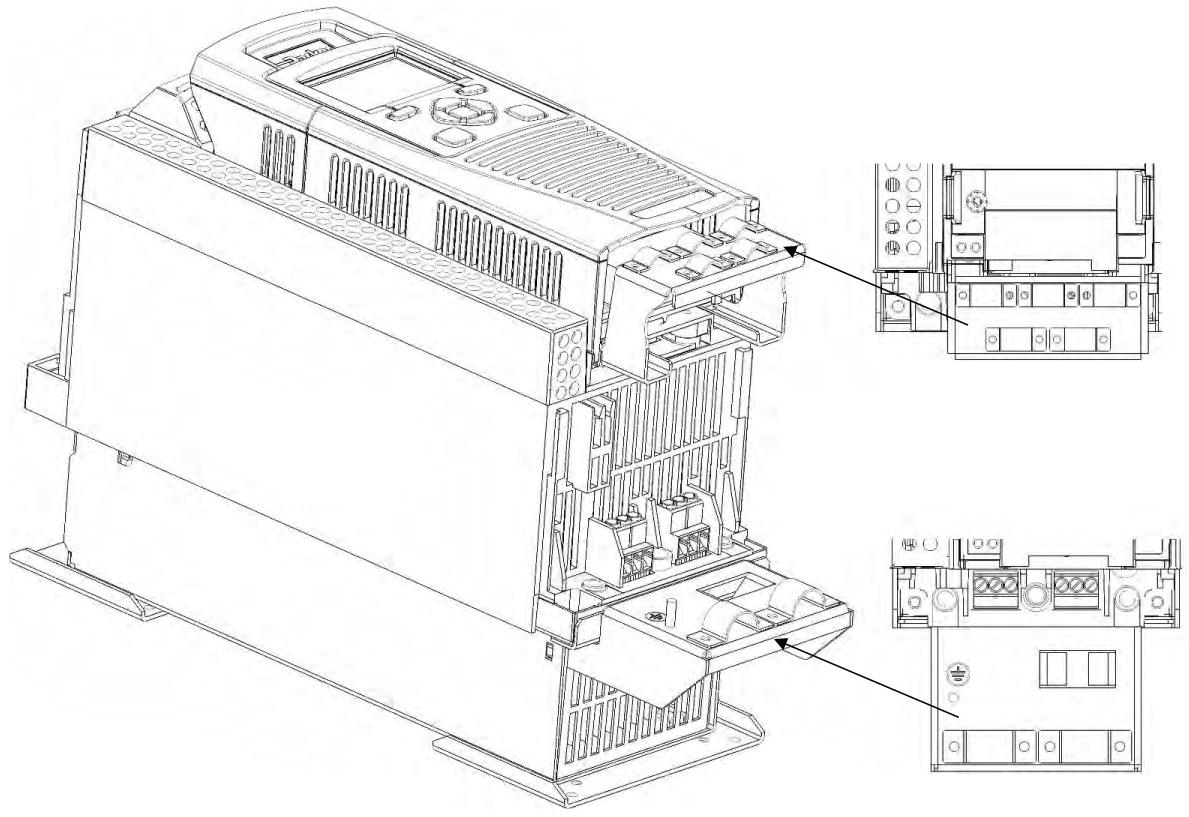
Ausschnappen lassen, um den Zugriff auf die Bremsklemmen zu ermöglichen.
Obere Klemmenabdeckung Oberteil Frontabdeckung
GKP
Drive Controlled Pump
Halterung für Steuer- und Netzkabel
Bei abgenommener unterer Haltung können Sie ggf. die Kabelhalterungen festschrauben.
Es werden Standard-Kabelhalterungen mit C2-Filterprodukten verwendet, die unter Angabe der folgenden Teilenummern von Parker bezogen werden können:
Baugröße D – LA501935U001
Baugröße E – LA501935U002
Baugröße F – LA501935U003
Baugröße G – LA501935U004
Baugröße H – LA501935U005
Baugröße J – LA501935U006
Klemmenabdeckung des Steuerteils (Unterteil Frontabdeckung)
Dichtung
Baugröße E illustriert
Untere Klemmenabdeckung
Kabelhalterung für Steuerkabel
Nicht im Standard-Lieferumfang bzw. Angebot enthalten
Kabelhalterung für Netzkabel
DCP Handbuch innen A4 DE NEU.indd 31.01.17 14
Parker Hannifin Corporation Hydraulics Group
Handbuch

Installation
Hinweise zur Verdrahtung
Wichtig: Die Steuertafel 0V muss zur Erfüllung der EMV- und Sicherheitsanforderungen außerhalb des Gerätes mit dem Schutzleiter verbunden werden. Sie können den Antrieb bei einer beliebigen gewählten Anwendung je nach Bedarf weiter im lokalen Modus betreiben.
Spannungsversorgungsanschlüsse
Schutzleiteranschlüsse (PE)
Das Gerät muss entsprechend EN 61800-5-1 dauerhaft geerdet werden – siehe unten. Schützen Sie die eingehende Spannungsversorgung unter Verwendung einer geeigneten Sicherung oder eines Trennschalters (Trennschaltertypen RCD, ELCB, GFCI werden nicht empfohlen).
Leistungsanschlüsse
Spannungsversorgungsanschlüsse
Führen Sie die Spannungsversorgungs- und Motorkabel durch die richtigen Kabeleingänge unter den Kabelschellen in den Antrieb ein und schließen Sie diese an die Leistungsklemmen an. Ziehen Sie alle Klemmen mit dem korrekten Anzugsmoment fest. Beachten Sie dabei die Tabelle der Anzugsmomente für die Anschlussklemmen.
Wichtig: Der Antrieb ist nur bei Ausstattung mit einem internen Filter für massebezogene Stromversorgungen (TN) geeignet. Externe Filter sind für TN und IT-Versorgungen (nicht massebezogen) verfügbar.
Für Installationen gemäß EN 61800-5-1 in Europa: • Für die permanente Erdung sind zwei eingehende Schutzleiter (Querschnitt < 10 mm²) oder ein einzelner Schutzleiter (Querschnitt > 10 mm²) erforderlich. Jeder Erdschutzleiter muss für den Fehlerstrom gemäß EN 60204 geeignet sein.
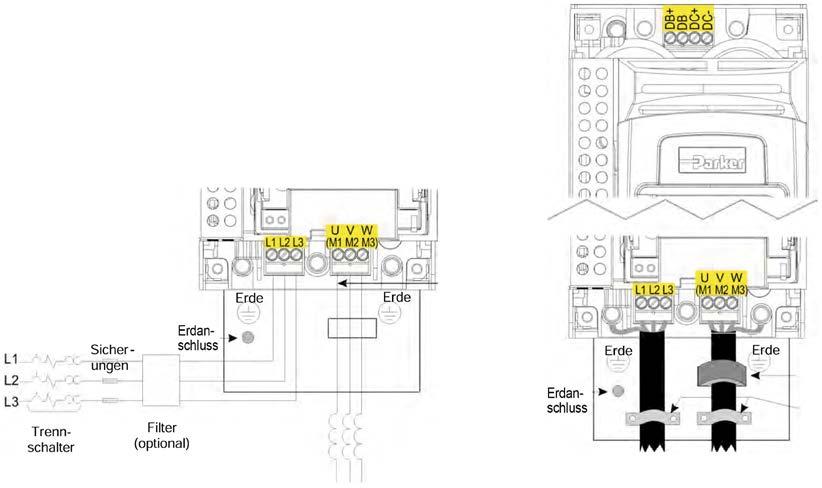
Ferritkern-Option zur Einhaltung des C2 EMV-Standards
Kabelschellen
Anschlussklemmen für Netzspannungseingang
AC-Motordrosseln
Nur bei langen Kabeln > 50 m
Motorklemmen
Parker
Corporation
DCP Handbuch innen A4 DE NEU.indd 31.01.17 15
Drive Controlled Pump
Hannifin
Hydraulics Group
Handbuch
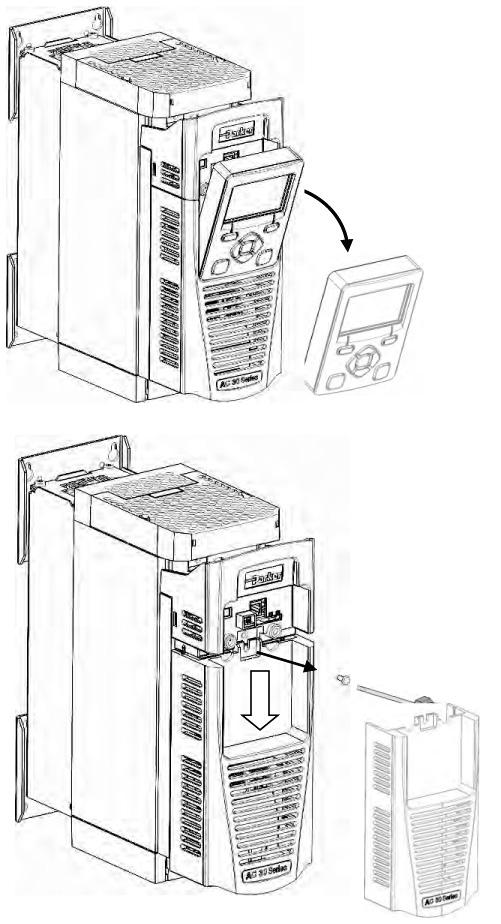
Entfernen der Steuermodulabdeckung
Um Zugang zum Steuerungskabel zu erhalten, entfernen Sie zunächst wie im Folgenden beschrieben die Steuermodulabdeckung:
1. Entfernen Sie zunächst das GKP, indem Sie es nach unten ziehen und abnehmen.
2. Lösen Sie die Schraube, schieben Sie die Steuermodulabdeckung etwas nach unten und nehmen Sie sie ab.
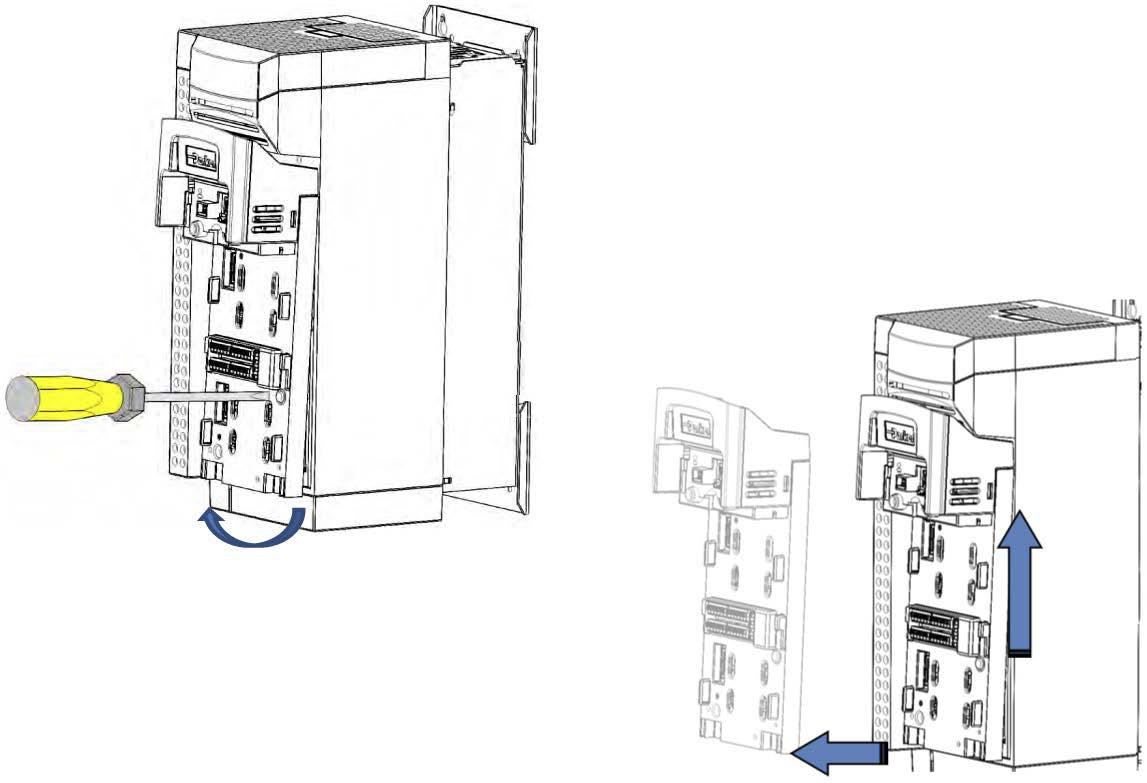
Entfernen des Steuermoduls
Trennen Sie das Gerät vom Netz, ehe Sie das Steuergerät vom Leistungsteil abziehen oder in diesen einstecken.
1. Lösen Sie die unverlierbare Schraube.
2. Heben Sie den unteren Rand der Baugruppe an.
3. Schieben Sie die Baugruppe so weit wie möglich nach oben, um sie von der Einheit zu trennen.
Drive Controlled Pump Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 16
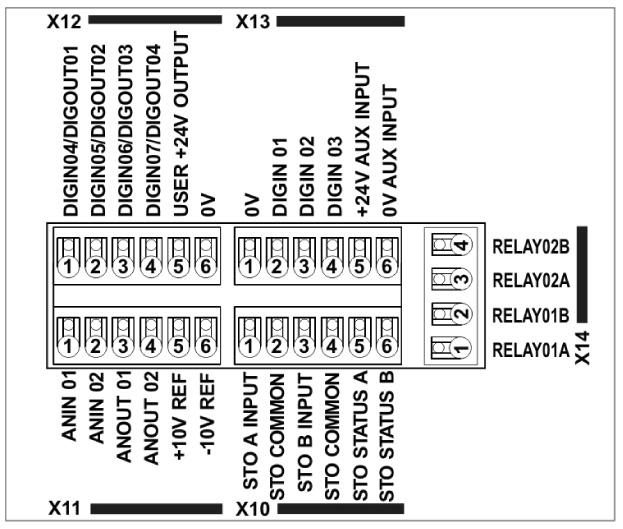
Steuerungsanschlüsse
Schaltplan der Steuerverdrahtung
Drive Controlled Pump
Terminal-Kabel Spezifikation
DCP Handbuch innen A4 DE NEU.indd 31.01.17 17
Klemmen-ID Funktion X10/01 STO A Eingang X10/02 STO Bezugsleiter X10/03 STO B Eingang X10/04 STO Bezugsleiter X10/05 STO Status A X10/06 STO Status B X11/01 ANIN 01 +10 V, 0-10 V, 0-20 mA, 4-20 mA) X11/02 ANIN 02 (+10 V, 0-10 V) X11/03 ANOUT 01 (+10 V, 0-10 V) X11/04 ANOUT 02 (0-10 V, 0-20 mA, 4-20 mA) X11/05 +10 V Referenz X11/06 -10 V Referenz X12/01 DIGIN 04 / DIGOUT 01 X12/02 DIGIN 05 / DIGOUT 012 X12/03 DIGIN 06 / DIGOUT 03 X12/04 DIGIN 07 / DIGOUT 04 X12/05 Benutzer +24 V Ausgang X12/06 0 V X13/01 (LH) 0 V X13/02 DIGIN 1 X13/03 DIGIN 2 X13/04 DIGIN 3 X13/05 +24V AUX Hilfseingang X13/06 0V AUX Hilfseingang X14/01 (BOT) Relais 01 (Kontakt A) X14/02 Relais 01 (Kontakt B) X14/03 Relais 02 (Kontakt A) X14/04 Relais 02 (Kontakt B)
Parker Hannifin Corporation Hydraulics Group
Handbuch
Starr minimal H05(07)V-U 0,2 mm2 Starr maximal H05(07)V-U 1,5 mm2. Flexible minimal H05(07)V-K 0,2 mm2 Flexible maximal H05(07)V-K 1,5 mm2 Aderendhülse DIN462228 Pt 1 minimal 0,25 mm 2 Aderendhülse DIN462228 Pt 1 maximal 1,5 mm 2 . Kunststoffkragen Aderendhülse DIN462228 Pt4 minimal 0,25 mm2 Kunststoffkragen Aderendhülse DIN462228 Pt4 maximal 0,75 mm2
Handbuch
Steuerungsanschlüsse
Eingänge – Analog (DCP3xxxA) Analog / Digitale Eingänge
Drive Controlled Pump
Eingänge – Feldbus (DCP3xxxC/D/E/P/N/T) Analog / Digitale
Steuer Wort (2021)
Auswahl über Hydraulik-Applikation (Control Type)
1) Nicht erforderlich (kann zur Anzeige verwendet werden)
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 18
Ausgewählte Hydraulikapplikation (Control Type) Terminal Q Control p Control p/Q Control LS Control Accumulator Control ANIN01 (X11/01) Istdruck* Istdruck Istdruck Istdruck p0 Istdruck p0 ANIN02 (X11/02) Sollvolumenstrom Solldruck Sollvolumenstrom Istdruck LS1 frei ANIN11 (X21/02) (optional) frei frei Solldruck Solldruck frei DIGIN01 (X13/02) Start mit steigender Flanke DIGIN02 (X13/03) Kein Stopp DIGIN03 (X13/04) Reset DIGIN04 (X12/01) Pumpe 1 An/Aus Einschaltsignal DIGIN05 (X12/02) Pumpe 2 An/Aus Abschaltsignal DIGIN06 (X12/03) Klemme verwendet als DIGOUT 03 DIGIN07 (X12/04) Klemme verwendet als DIGOUT 04
Eingänge
Ausgewählte Hydraulikapplikation (Control Type) Terminal Q Control p Control p/Q Control LS Control Accumulator Control ANIN01 (X11/01) Istdruck* Istdruck Istdruck Istdruck p0 Istdruck ANIN02 (X11/02) frei Istdruck LS1 frei ANIN11 (X21/02) (optional) frei DIGIN01 (X13/02) frei DIGIN02 (X13/03) frei DIGIN03 (X13/04) frei DIGIN04 (X12/01) frei Einschaltsignal DIGIN05 (X12/02) frei Abschaltsignal DIGIN06 (X12/03) Klemme verwendet
DIGOUT
DIGIN07
Klemme
als
03
(X12/04)
verwendet als DIGOUT 04
Bit Q Control p Control p/Q Control LS Control Accumulator Control 0 Start mit steigender Flanke 1 Kein Stopp 2 Reset 3 Pumpe 1 An/Aus Einschaltsignal 4 Pumpe 2 An/Aus Abschaltsignal 5..15 reserviert
Handbuch
Ausgänge – Analog (DCP3xxxA)
Analog / Digitale Ausgänge
Drive Controlled Pump
Auswahl über Hydraulik-Applikation (Control Type)
ANOUT 01 (X11/03) Istdrehzahl Motor
ANOUT 02 (X11/04) Ansteuersignal für Druckbegrenzungsventil
RELAY 01 (X14/01 & X14/02) Antrieb dreht
RELAY 02 (X14/03 & X14/04) Kein Fehler
DIGOUT 01 (X12/01)
Klemme verwendet als DIGIN 04
DIGOUT 02 (X12/02) Klemme verwendet als DIGIN 05
DIGOUT 03 (X12/03) Umlaufventil*
DIGOUT 04 (X12/04) Volumenstrom erreicht
DIGOUT 11 (X20/01) (optional)
Ausgänge – Feldbus (DCP3xxxC/D/E/P/N/T)
Status Wort (2022)
erreicht
erreicht
erreicht
erreicht
erreicht
1) Wenn interner Drehzahlsollwert < min. Drehzahl, dann DIGOUT 03 = TRUE, sonst FALSE. Kann zur Ansteuerung eines Umlaufventils verwendet werden (nicht enthalten)
Parker
DCP Handbuch innen A4 DE NEU.indd 31.01.17 19
Hannifin Corporation Hydraulics Group
Terminal Q Control p Control p/Q Control LS Control Accumulator Control
Druck
Volumenstrom
Druck
Druck
Druck
Auswahl über Hydraulik-Applikation Bit Q Control p Control p/Q Control LS Control Accumulator Control 0 Antrieb läuft 1 Kein Fehler 2 Umlaufventil 1) 3 Volumenstrom erreicht Druck erreicht Volumenstrom erreicht Druck erreicht reserviert 4 reserviert Druck erreicht reserviert 5..15 reserviert
Handbuch
Optionskarten
Drive Controlled Pump
Wir bieten eine Reihe von Optionskarten, die werksseitig in den AC30 V installiert sind.
Bestellschlüssel Beschreibung
7004-01-00
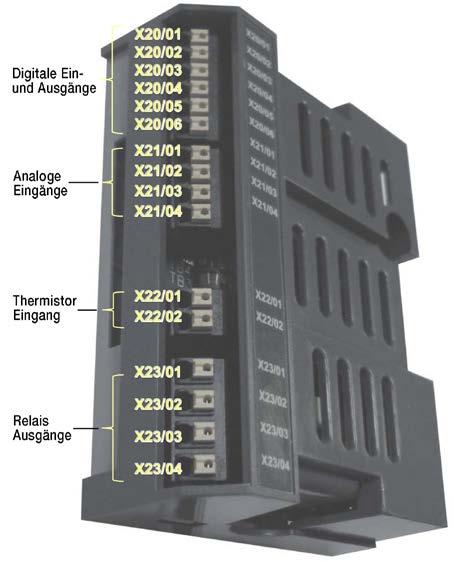
Universal-E/A-Option, auch als GPIO (General Purpose I/O) bezeichnet

Digitale Eingänge oder Ausgänge, Analoge Eingänge, Motorthermistor-Eingang, Spannungsfreie Relaisausgänge, Echtzeituhr (RTC)
Beschreibung:
Wird eine der Klemmen X20/01 bis X20/04, als Digitaler Ausgang konfiguriert, muss X20/05 mit 24 V versorgt werden und X20/06 mit der 0 V der gleichen Versorgung verbunden sein.
7004-02-00
Motorthermistor-Eingang
7004-03-00 Motorthermistor und Echtzeituhr
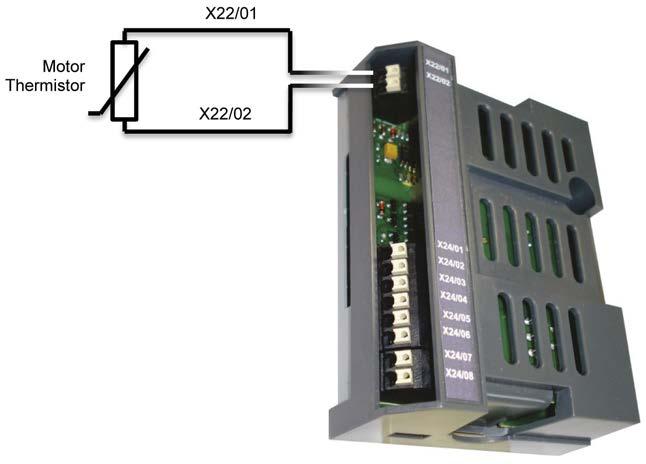
7004-04-00 Pulse Encoder und Motorthermistor
Universal-E/A-Option
Die digitalen Ein- und Ausgänge sind vollständig von der Elektrik des Umrichters getrennt. Daher ist es wichtig, das X20/06 mit 0 V der Versorgung verbunden ist.
Beispiele:
Parker
DCP Handbuch innen A4 DE NEU.indd 31.01.17 20
Hannifin Corporation Hydraulics Group
Klemmen-ID Name Bereich Beschreibung X20/01 DIN11/ DOUT11 0 bis 24 VDC Digital Input / Output 11 Siehe Beschreibung X20/02 DIN12/ DOUT12 0 bis 24 VDC Digital Input / Output 11 Siehe Beschreibung X20/03 DIN13/ DOUT13 0 bis 24 VDC Digital Input / Output 11 Siehe Beschreibung X20/04 DIN14/ DOUT14 0 bis 24 VDC Digital Input / Output 11 Siehe Beschreibung X20/05 24 V DC Eingang 24 V ±10 % 24 V DC Eingang Erforderlich für die Digitalen Ausgänge Siehe Beschreibung X20/06 DIG 0 V 0 V 0 V Bezug für Digital In- und Outputs Siehe Beschreibung
Analog Eingänge
Handbuch Klemmen-ID
X21/01 An 0 V 0 V 0 V Bezug für Analogeingänge
X21/02 ANIN11 -10 V bis 10 V Analogeingang 11
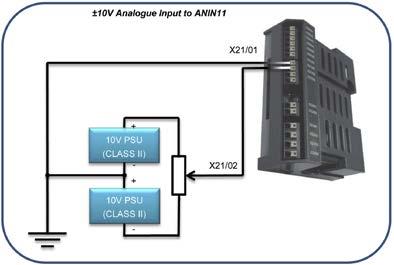
X21/03 ANIN12 -10 V bis 10 V Analogeingang 12
X21/04 ANIN13 -10 V bis 10 V Analogeingang 13
Beschreibung:
Die Analogeingänge sind getrennt. Das bedeutet das die 0 V Bezug an Klemme X21/01 nicht intern mit der 0 V des Umrichters verbunden ist.
X21/01 muss immer mit der Benutzer 0V (Referenz) verbunden werden, die mit dem System geerdet ist. Wird ein Analogeingang nicht verwendet, sollte der Eingang mit X21/01 verbunden werden, um ungültige Werte zu verhindern.
Beispiel:
Drive Controlled Pump
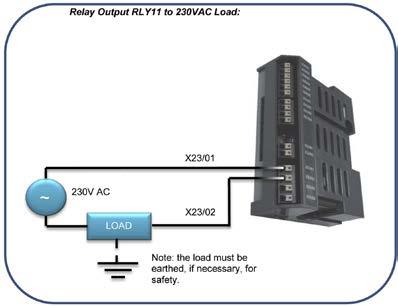
Spannungsfreie Relaisausgänge
Klemmen-ID
Beispiel:
Pulse Encoder und Motorthermistor
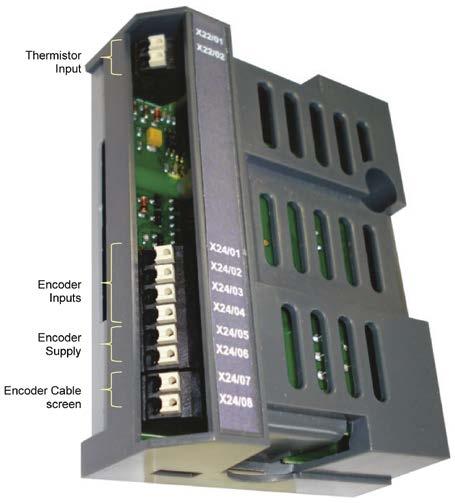
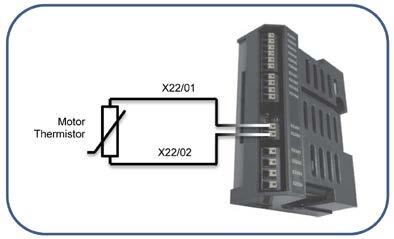
Motor Thermistor
Sie den Motorthermistor zwischen diesen beiden Anschlüssen an
Beispiel:
Motor Thermistor
diesen
DCP Handbuch innen A4 DE NEU.indd
21
Parker Hannifin Corporation Hydraulics Group
31.01.17
Name Bereich Beschreibung
Klemmen-ID Name Bereich Beschreibung X22/01 TH1 0 bis 4.5 kΩ Schließen
X22/02 TH2
Name Bereich Beschreibung X22/01 TH1 0
4,5 kΩ Schließen
Klemmen-ID
bis
Sie den Motorthermistor zwischen
beiden Anschlüssen an X22/02 TH2
Bereich Beschreibung X23/01 RLY11A 3 A @ 250 V AC 3 A @ 30 V DC Klemme A vom Relais 11 X23/02 RLY11B Klemme B vom Relais 11 X23/03 RLY12A Klemme A vom Relais 12 X23/04 RLY12B Klemme B vom Relais 12
Name
Handbuch
Beispiel:
Drive Controlled Pump
Pulse Encoder
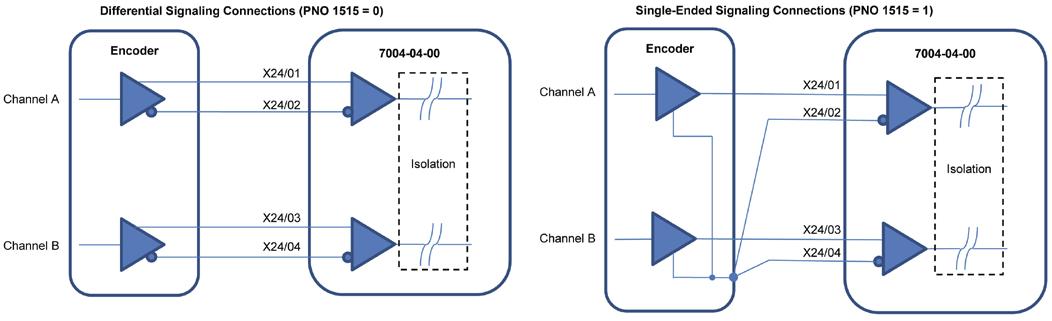
Klemmen-ID Name Bereich Beschreibung
X24/01 Kanal A
X24/02 Kanal /A
X24/03 Kanal B
X24/04 Kanal /B
±3 V bis ±24 V (differenzial) oder
0 V bis 24 V (Single-Ended)
X24/05 Versorgung positiv Wählbar
X24/06 Versorgung negativ
X24/07 Kabelschirm
X24/08 Kabelschirm
Beschreibung:
Encoder Eingang, für eine breite Palette an Gebern
5 V, 12 V, 15 V und 24 V Versorgung für Encoder über Software auswählbar
Die Versorgung für den Geber ist komplett von der internen Schaltung des Umrichters und den Encoder Signalen getrennt.
DCP Handbuch innen A4 DE NEU.indd 31.01.17 22
Parker Hannifin Corporation Hydraulics Group
Handbuch
Ethernet (Netzwerkanbindung)
Einführung
Die Kommunikation mit dem AC30V erfolgt über einen Ethernet-Port am Steuermodul. Dies ermöglicht den Zugriff auf folgende Komponenten:
• PDQ (Parker Drive Quicktool – das PC-Programmiertool; siehe Anhang D – Programmierung)
• Modbus TCP-Server (siehe Anhang A - Modbus TCP)
• HTTP-Server (siehe Abschnitt unten)
Drive Controlled Pump
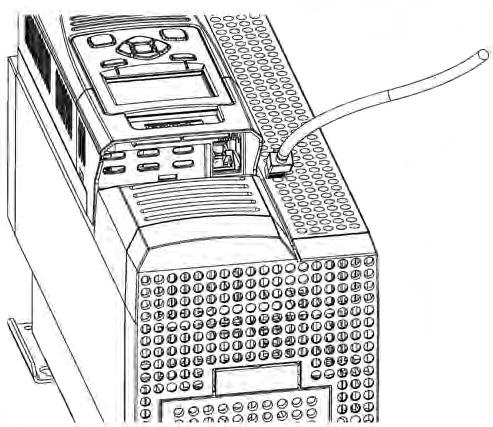
Anschluss an ein Netzwerk
Stecken Sie das Ethernet-Kabel wie unten dargestellt ein:
Nehmen Sie zum Trennen des Kabels zunächst das GKP ab und führen Sie anschließend einen Schraubendreher ein, um die Verriegelung am Ethernet-Clip zu lösen.
Bedeutung der Ethernet-LEDs:
Aktivität Link
Empfohlenes Kabel:
Wir empfehlen die Verwendung eines geschirmten Kabels vom Typ CAT5e oder CAT6.
Statusüberwachung
Die MAC-Adresse des Ethernet-Ports ist werksseitig eingestellt und mit folgendem Parameter lesbar:

0945 MAC-Adresse
Die aktuelle IP-Einstellungen des AC30V können mit Hilfe folgender Parameter überwacht werden:
0926 IP-Adresse
0927 Subnetzmaske
0928 Gateway Adresse
Der Ethernet-Status kann mit dem Parameter 0919 Ethernet Status und anhand des Ethernet-Symbols in der Statusleiste des GKP überwacht werden.
IP-Adresse einstellen
Für die Kommunikation über Ethernet muss eine IPAdresse eingestellt werden. Die IP-Adresse ist wie folgt einstellbar:
• manuell auf eine feste Adresse
• automatisch durch einen an das Netzwerk angeschlossenen DHCP-Server
• automatisch durch den AC30V auf eine Link-Local-Adresse unter Verwendung von Auto-IP (auch geläufig unter der Bezeichnung "Automatic Private IP Addressing")
Die Parameter 0929 DHCP und 0930 Auto-IP legen fest, wie die IP-Adresse eingestellt wird. Die Werkseinstellung für diese Parameter lautet WAHR (TRUE).
Der Parameter 0936 Einstellg. schützen, sofern auf WAHR (TRUE) gesetzt, verhindert, dass ein Konfigurationstool die IP-Einstellungen ändert.
DCP Handbuch innen A4 DE NEU.indd 31.01.17 23
Parker Hannifin Corporation Hydraulics Group
Handbuch
Manuelle Einstellung der IP-Adresse
Zur manuellen Einstellung der IP-Adresse müssen DHCP und Auto-IP deaktiviert sein. Die IP-Adresse, die Subnetzmaske und die Gateway Adresse werden durch die Werte in den Parametern 0933 User IP-Adresse, 0934 User Subnetzmaske und 0935 Gateway Adresse festgelegt.
Wenn das Netzwerk über kein Gateway zu einem anderen Netzwerk verfügt, kann die Gateway-Adresse auf 0.0.0.0 gesetzt werden.
Automatische Zuweisung einer IP-Adresse mit DHCP
Wenn das Netzwerk, mit dem der AC30V verbunden ist, über einen DHCP-Server (Dynamic Host Configuration Protocol) verfügt, kann die Zuweisung der IP-Adresse über diesen Server erfolgen. Die Funktion DHCP muss aktiviert werden. Der AC30V fordert daraufhin eine IP-Adresse, eine Subnetzmaske und eine Gateway-Adresse von DHCPServer an.
Hinweis: Der AC30V fordert die IP-Adresse jedes Mal an, wenn der Antrieb eingeschaltet oder das Ethernet-Kabel eingesteckt wird. Es besteht keine Garantie dafür, dass der DHCP-Server jedes Mal dieselbe IP-Adresse zuweist.
Automatische Zuweisung einer IP-Adresse mit Auto-IP
Der AC30V kann sich mit Auto-IP automatisch selbst eine Link-Local-Adresse zuweisen. Diese Art der Zuweisung erfolgt, wenn eine automatische Adresse erforderlich, aber kein DHCP-Server verfügbar ist, z. B. in einem kleinen lokalen Netzwerk oder bei direktem Anschluss des AC30V an einen PC (Punkt-zu-Punkt). Die Funktion Auto-IP muss aktiviert werden.
AC30V wählt willkürlich eine IP-Adresse aus dem Link-Local-Adressbereich 169.254.*.*. Vor der Zuweisung prüft der AC30V, dass kein anderes Ethernet-Gerät im Netzwerk diese Adresse verwendet. Der AC30V speichert diese IP-Adresse (im Parameter 0931 Letzte Auto IP Adr.) und versucht, diese bei der nächsten Aktivierung der Funktion Auto-IP zu verwenden. Die Gateway-Adresse ist auf 0.0.0.0 festgelegt.
Werkseinstellung (gemeinsame Verwendung von DHCP und Auto-IP)
Einstellung 0929 DHCP WAHR 0930 Auto IP WAHR
0932 DHCP To Auto IP
Der Timeout in Sekunden, nach dessen Ablauf DHCP aufgibt und eine IP-Adresse mit Auto-IP zugewiesen wird.
Wenn sowohl DHCP als auch Auto-IP aktiviert ist, erfolgt die Zuweisung der IP-Adresse je nach Netzwerk automatisch. Zunächst wird versucht, eine IP-Adresse von einem DHCP-Server (sofern angeschlossen) zu erhalten. Wenn nach Ablauf eines Timeouts kein DHCP-Server verfügbar ist, wird über Auto-IP eine Link-Local-Adresse zugewiesen. Hinweis: Wenn eine Adresszuweisung mit Auto-IP erfolgt und später eine DHCP-Adresse verfügbar wird, ergeht erst dann eine neue Anforderung an den DHCP-Server, wenn das Ethernet-Kabel aus- und eingesteckt oder die Spannungsversorgung des AC30V ausgeschaltet und wieder eingeschaltet wird.
Drive Controlled Pump Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 24
Parameter Einstellung 0929 DHCP FALSCH 0930 Auto IP FALSCH 0933 User IP-Adresse Bevorzugte IP-Adresse 0934 User Subnetzmaske Bevorzugte Subnetzmaske 0935 User Gateway Adresse Bevorzugte Gateway Adresse Parameter Einstellung 0929 DHCP WAHR 0930 Auto IP FALSCH Parameter Einstellung 0929 DHCP FALSCH 0930 Auto IP WAHR
Parameter
Handbuch
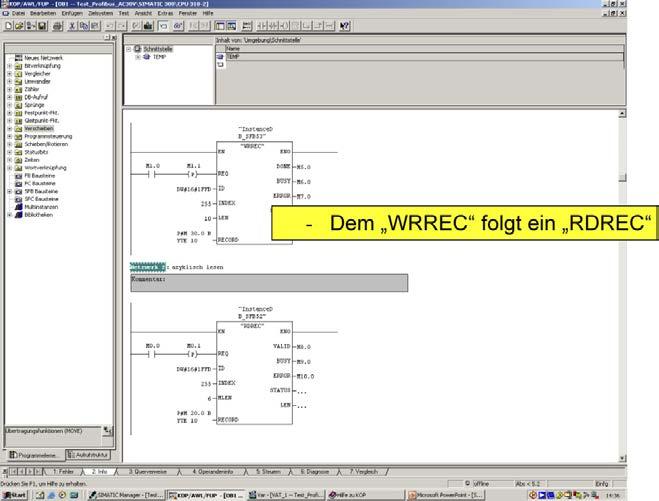
Profibus Kommunikation mit Siemens S7
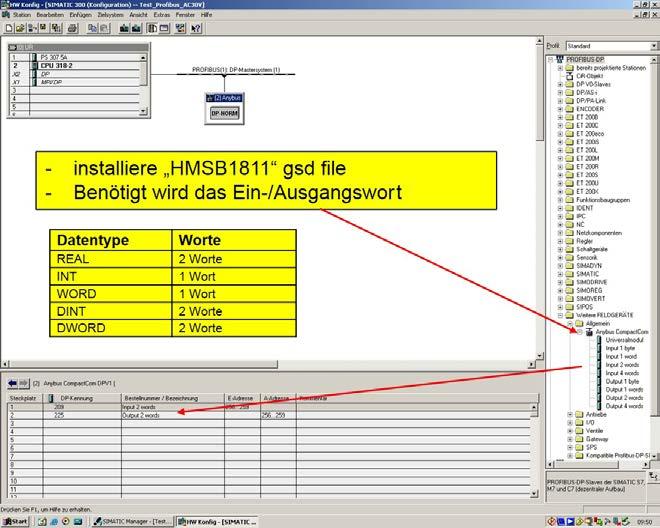
Zyklische Kommunikation
Azyklische Kommunikation
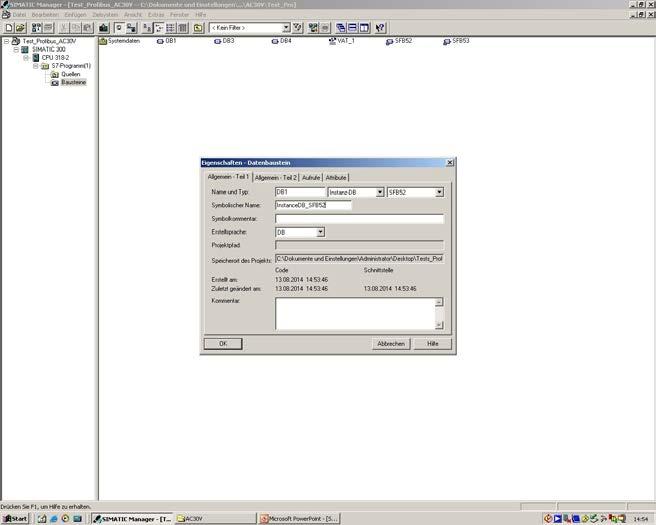
- Kopiere SFB52 zum Schreiben und SFB53 zum Lesen aus der internen Bibilothek
- Definiere DBs als Instanzen von SFB52 und SFB53
Corporation
DCP Handbuch innen A4 DE NEU.indd 31.01.17 25
Drive Controlled Pump Parker Hannifin
Hydraulics Group
Handbuch
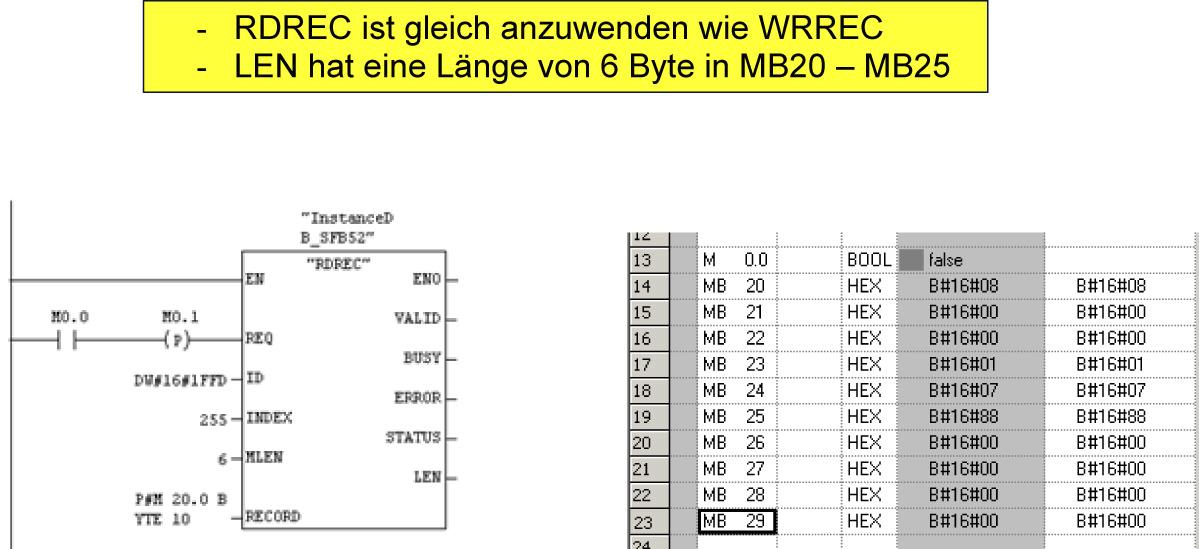
Azyklische Kommunikation
Drive Controlled Pump
– ID ist die Anybus Diagnose ID
Click auf DP-Mastersystem 1
– Lese Diagnose ID 2
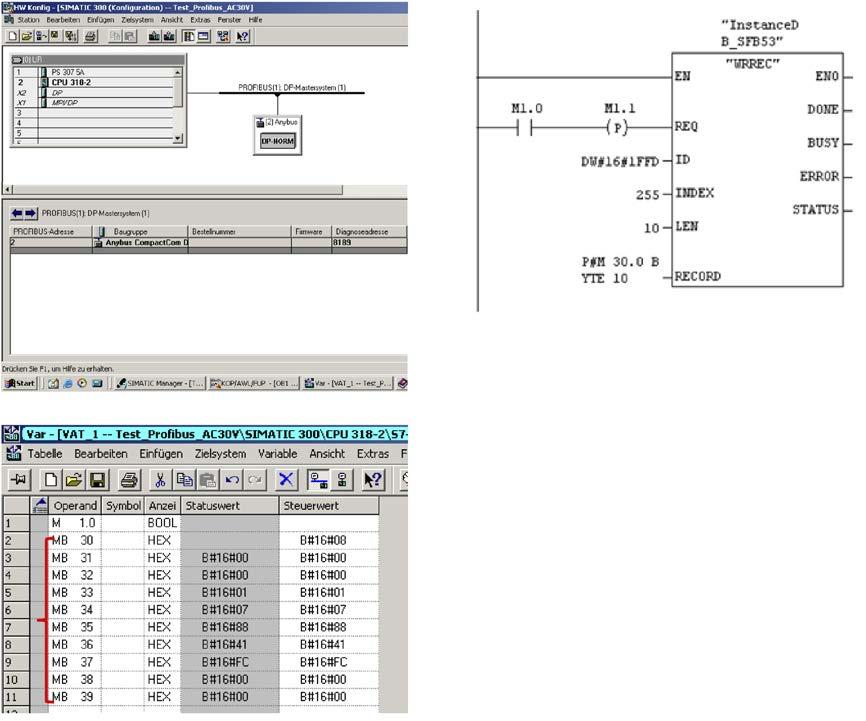
– INDEX ist immer 255
– LEN enthält die Größe von record 3
RECORD sollte wie gezeigt gesetzt werden
DCP Handbuch innen A4 DE NEU.indd 31.01.17 26
Parker Hannifin Corporation Hydraulics Group
–
–
1 2 3
Handbuch
Azyklische Kommunikation
Drive Controlled Pump
– Parameter Nummer wird auf MB34 und MB35 geschrieben 1
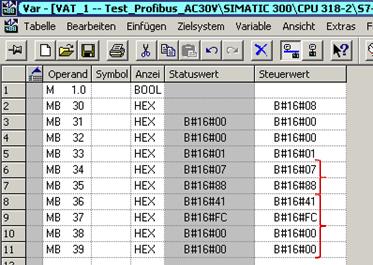
hier 1928 (INT) 788 (hex)
– Wert wird auf MB36 – MB39 geschrieben 2
– hier 31.5 (IEEE754) 41FC (hex)
DCP Handbuch innen A4 DE NEU.indd 31.01.17 27
Parker Hannifin Corporation Hydraulics Group
–
1 2
Handbuch
STO Funktionsbeschreibung
Sicher abgeschaltetes Moment (STO) SIL3/PLe Allgemeine Informationen
Die unsachgemäße Verwendung des Gerätes birgt potenzielle Gefahren. Deshalb darf das Gerät nur durch qualifiziertes Fachpersonal mit genauer Kenntnis der hier beschriebenen Anweisungen eingesetzt werden.
Dieses Kapitel beinhaltet allgemeine Informationen über die Funktion „Sicher abgeschaltetes Moment“ (Safe Torque Off, STO).
Mit dem AC30V lassen sich zwei Sicherheitsfunktionen realisieren: STO und „Sicherer Stopp 1“ (SS1). Zur Erfüllung aller Anforderungen an die Sicherheitsfunktionen STO und SS1 sollte ein externes Sicherheitsschaltgerät eingesetzt werden.
Das externe Sicherheitsschaltgerät veranlasst zur Implementierung der Funktionen „Sicherer Stopp 1“ (SS1) den geführten Stopp des Antriebs bis zum Stillstand mit anschließender Aktivierung der Funktion STO im AC30V. Siehe EN 61800-5-2:2007, Absatz 4.2.2.3 für die formellen Definitionen.
Der Anwender ist verpflichtet:
1. eine Risikoanalyse durchzuführen.
2. für jede Anwendung eine angemessene Lösung zu entwickeln, zu implementieren und zu bewerten, die alle relevanten Sicherheitsanforderungen erfüllt.
Die STO-Funktion ist eine elektronische Schutzfunktion für den Einsatz während des normalen Betriebs des Antriebs. Sie ist nicht für Service-Zwecke, z. B. Wartung, Reparatur, Austausch von Komponenten oder ähnliche Aktivitäten vorgesehen. Für diese Tätigkeiten sind normgerechte Vorrichtungen zur galvanischen Trennung und Verriegelungsverfahren erforderlich.
Die STO-Funktion des AC30V ist eine werkseitig installierte und getestete Funktion.
Die STO-Funktion verhindert, dass ein AC30V Antrieb Rotationskräfte an den angeschlossenen Elektromotor überträgt. Siehe EN 61800-5-2:2007, Absatz 4.2.2.2 für die formelle Definition.
Um einen hohen Grad an Sicherheit zu gewährleisten, sind zwei unabhängige STO-Steuerkanäle in der Hardware implementiert. Der STO-Schaltkreis im AC30V ist so aufgebaut, dass bei Auftreten eines Fehlers in einem Kanal der zweite Kanal sicherstellt, dass kein unbeabsichtigter Betrieb des Antriebs erfolgt. Ein einzelner Fehler führt somit nicht zum Versagen der STO-Funktion im AC30V. Treten mehrere Fehler auf, kann dies jedoch zum Versagen der Sicherheitsfunktion führen. Dies entspricht den festgelegten Sicherheitsstufen.
Die STO-Funktion übersteuert jegliche Versuche, den Antrieb zu starten. Wird die STO-Funktion von einem oder beiden STO-Steuerungseingängen angefordert, lässt sich der Antrieb nicht starten. Dies ist selbst dann gewährleistet, wenn z. B. ein interner Softwarefehler zu einem Startversuch des Motors führt.
Die STO-Funktion ist in der Hardware implementiert und übersteuert alle softwareseitigen Aktionen. Einzig der Status der STO-Funktion wird je nach Konfiguration des Antriebs über ein grafisches Keypad, eine serielle Kommunikationsverbindung oder eine Eingangsklemme an den Anwender gemeldet.
Der angegebene SIL/PL Sicherheitslevel dieses STO-Produkts lässt sich nur erreichen, wenn die beiden STO-Benutzereingänge unabhängig voneinander angesteuert werden. Die Ansteuerung durch eine gemeinsame Signalquelle führt zu einem Verlust der Sicherheitsfuntion, da in diesem Fall eine Erkennung einzelner Fehler nicht möglich ist.
Die Verwendung dieses Produkts mit gemeinsamer Signalquelle verletzt die STOProduktspezifikation und erfolgt auf eigenes Risiko des Anwenders.
Drive Controlled Pump Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 28
Handbuch
STO-Klemmenanschlüsse
Klemmennummer
Klemmenname
Drive Controlled Pump
0V oder nicht angeschlossen = Antrieb ist gesperrt, STO ist aktiv auf Kanal A. 24V = Antrieb ist einschaltbereit, sofern auch X10/03 = 24V. Dieser Eingang ist von allen anderen Klemmen des AC30V außer X10/02, X10/03 und X10/04 optisch isoliert.
X10/02 STO Common 3
X10/03 STO B Eingang
X10/04 STO Common 2
Bezugspotenzial für die Eingänge STO A und STO B. Intern verbunden mit X10/04. Diese Klemme oder X10/04 müssen an einem Punkt im System mit Erde verbunden sein.
0V oder nicht angeschlossen = Antrieb ist gesperrt, STO ist aktiv auf Kanal B. 24V = Antrieb ist einschaltbereit, sofern auch X10/01 = 24V. Dieser Eingang ist von allen anderen Klemmen des AC30V außer X10/01, X10/02 und X10/0 optisch isoliert.
Bezugspotenzial für die Eingänge STO A und STO B. Intern verbunden mit X10/02. Diese Klemme oder X10/02 müssen an einem Punkt im System mit Erde verbunden sein.
X10/05 STO Status A
Zusammen mit X10/06 bildet diese Klemme einen potenzialfreien Halbleiter-Relaisausgang. Dieser Ausgang ist AKTIV (äquivalent zu geschlossenen Relaiskontakten), wenn der STO-Kreis im sicheren Zustand ist, d. h. wenn der Antrieb den Motor kein Drehmoment produzieren lässt. Dieser Ausgang sollte jedoch hauptsächlich zu Anzeigezwecken verwendet werden. Im unwahrscheinlichen Fall eines Fehlers im STO-Kreis könnte ein fehlerhafter STO-Status angezeigt werden. Die Statusanzeige garantiert nicht, dass der Motor kein Drehmoment produziert. Das Halbleiterrelais wird von einer selbst rückstellenden Sicherung geschützt.
X10/06 STO Status B
Wahrheitstabelle
Übersicht STO Eingang A X10/01 STO Eingang B X10/03 Funktion des Antriebs STO Statusausgang X10/05, X10/06 STO Aktiv 0V 0V
EIN Erkennung einer unzulässigen EinkanalAnsteuerung 24V 0V
Der Antrieb kann nicht starten oder Energie zum Motor liefern. STO-Auslösung gemeldet. Ist einer dieser Zustände für mehr als 3,0 s aktiv (maximale Zeit zur Fehlererkennung), wird die STO-Funktion im Fehlerstatus verriegelt. Der Antrieb kann erst nach Behebung des Fehlers starten; alle Versorgungsspannungen werden aus- und wieder eingeschaltet (Leistung und, sofern angewendet, 24 VDC Hilfsspannung).
AUS 0V 24V
Der Antrieb ist einschaltbereit und über die Software steuerbar. Der Antrieb kann den Motor mit Energie versorgen. AUS Antrieb nicht unter Spannung Nicht relevant Nicht relevant Der Antrieb kann nicht starten oder Energie zum Motor liefern. AUS
STO Inaktiv 24V 24V
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 29
1) Nicht X10/02 und X10/4 gleichzeitig erden, da anderenfalls eine Erdschleife entstehen kann. Beschreibung
X10/01 STO A Eingang
Zusammen mit X10/05 bildet diese Klemme einen potenzialfreien Halbleiter-Relaisausgang. Siehe Beschreibung für X10/05.
Die STO-Klemmen sind an einem 6-fach-Klemmenblock X10 angebracht. Dieser ist am Gehäuse des AC30V Steuerteils montiert. Die Klemmenbezeichnungen lauten wie folgt:
Der Antrieb kann nicht starten oder Energie zum Motor liefern. STO-Auslösung gemeldet. Dies ist der „sichere“ Zustand des Produkts mit korrekter zweikanaliger Ansteuerung.
Dies ist eine Einkanal-Ansteuerung, die nicht für Anwendungen mit Sicherheitskategorie 3 / PLe / SIL3 verwendbar ist.
Handbuch
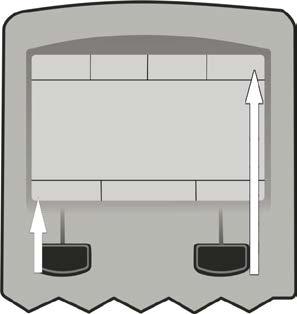
Applikationen ohne STO-Funktion
Drive Controlled Pump
Die STO-Eingänge X10/01 und X10/03 müssen mit 24 VDC verbunden sein. Der 0V Bezug ist die Klemme X10/02 oder X10/04.
Der STO-Statusausgang an X10/05 und X10/06 muss nicht angeschlossen werden.
Die gesamte dargestellte Verdrahtung muss sich im Schaltschrank befinden.
In diesem Beispiel sind die STO-Eingänge X10/01 und X10/03 deaktiviert (verbunden mit +24V). Die Steuerung des Antriebs erfolgt ohne interne Sicherheitsfunktion, ausschließlich über die Software. Der Antrieb wird über die eigenen Start- und Stopptasten angesteuert.
Es darf nur X10/02 oder X10/4 geerdet werden, d. h. es dürfen nicht beide geerdet werden, da ansonsten eine Erdschleife entstehen kann.
Anwendungen (Applikationen)
Beschreibung
Die Drive Controlled Pump unterstützt die folgenden 5 Betriebsarten:
• “Q” Control (Volumenstromregelung)
• “p” Control (Druckregelung)
• “p/Q” Control (Volumenstromregelung mit überlagerter Druckregelung)
• “LS” Control (Load sensing mit 2x LS-Druck-Eingängen)
• “ACCU” Control (Speicherladefunktion)
Eigenschaften
• Graphische Bedieneinheit für Hydraulikfunktionen
• Unterstützt Konstant- und Verstellpumpen
• Antriebsparameter für Parker-Pumpen (v, nmax, amax, …) können direkt über Bestellcode ausgewählt werden
• Integrierte Ansteuerung optionaler Umlaufventile (S/W) und Proportionaldruckventile
• Doppelpumpe: Logik für Ein- und Ausschalten von Hoch- und Niederdruckstufen
• Leckagekompensation für Parker DCP-Pumpen
• Elektrische Leistungsregelung
• Master-Slave Pumpenregelung mehrerer Drive Controlled Pump-Einheiten
Anforderungen
Um einen AC30V, wie in dieser Dokumentation beschrieben, als Bestandteil der Drive Controlled Pump nutzen zu können, muss die Applikations Software DCP3SW001001_REVx auf dem AC30V vorhanden sein und die Firmware des Geräts 1.10 oder neuer sein.
Parker Hannifin Corporation Hydraulics
DCP Handbuch innen A4 DE NEU.indd 31.01.17 30
Group
Volumenstromregelung (Q Control)
Drive Controlled Pump
Druckregelung (p Control)
Volumenstromregelung mit überlagerter Druckregelung (p/Q Control)
DCP Handbuch innen A4 DE NEU.indd 31.01.17 31 Handbuch Motor Control P1 P2 Sequencing Logic ANIN 02(X11/02) M P ANIN 01 (X11/01) Actual Motor Speed Actual pressure DIGIN01 (X13/02) DIGIN02 (X13/03) DIGIN03 (X13/04) DIGIN04 (X12/01) DIGIN05 (X12/02) RELAY 01 (X14/01 & X14/02) RELAY 02 (X14/03 & X14/04) DIGOUT 03 (X12/ 03) DIGOUT 04 (X12/ 04) Start No Stop Reset Pump1 On/Off Pump2 On/Off Drive running Not Tripped Bypass Valve Flow reached Pressure Setpoint ANOUT 02(X11/04)CMD pressure valve amax nmin/max Filter PWM P I Filter ANOUT01(X11/03) D
Parker Hannifin Corporation Hydraulics Group
Leakage Comp Motor Control P1 P2 Sequencing Logic ANIN02(X11/02) M P ANIN 01 (X11/01) Actual Motor Speed Actual pressure (optional ) PWM DIGIN01 (X13/02) DIGIN02 (X13/03) DIGIN03 (X13/04) DIGIN04 (X12/01) DIGIN05 (X12/02) RELAY 01 (X14/01 & X14/02) RELAY 02 (X14/03 & X14/04) DIGOUT 03 (X12/03) DIGOUT 04 (X12/04) Start No Stop Reset Pump1 On/Off Pump2 On/Off Drive running Not Tripped Bypass Valve Flow reached Flow Setpoint Filter amax nmin/max Filter ANOUT 01 (X11/03) Motor Control P1 P2 Sequencing Logic ANIN 11(X21/02) M P ANIN01 (X11/01) Actual Motor Speed Actual pressure DIGIN01 (X13/02) DIGIN02 (X13/03) DIGIN03 (X13/04) DIGIN04 (X12/01) DIGIN05 (X12/02) RELAY 01 (X14/01 & X14/02) RELAY 02 (X14/03 & X14/04) DIGOUT 03 (X12/03) DIGOUT 04 (X12/04) Start No Stop Reset Pump1 On/Off Pump2 On/Off Drive running Not Tripped Bypass Valve Flow reached Pressure SetpointCMD pressure valve Leakage Comp Flow Setpoint DIGOUT 11 (X20/01) Filter PWM amax nmin/max Filter P I ANOUT01(X11/03) ANOUT02(X11/04) D ANIN 02(X11/02) Filter Pressure reached
Handbuch
Elektronische Lastkompensation (eLCP)
Grafisches Keypad
Der AC30V ist mit einem grafischen Keypad ausgestattet, das kurz als GKP bezeichnet wird.
Das GKP ermöglicht die lokale Steuerung des Antriebs, die Überwachung und die vollständige Inbetriebnahme.
Das GKP sitzt in der Frontseite des Antriebs. Wird ein dezentraler Betrieb gewünscht, installieren Sie das GKP in bis zu drei Meter Entfernung. Verwenden Sie in diesem Fall den Montagebausatz mit Verbindungskabel.
Montage eines dezentralen GKP
Bei dezentraler Montage an einem Schaltschrank oder einer Tafel (Durchsteckmontage) muss das GKP an einer flachen Oberfläche angebracht werden. Maximale Kabellänge < 3 Meter.
Bei separater Bestellung umfasst das GKP-Kit das GKP und das Anschlusskabel – Teilnummer 7001-00-00.
Wenn das GKP mit dem Antrieb bestellt und geliefert wird, ist das Anschlusskabel nicht enthalten.
Details zum Tafelausschnitt:
GKP – Rückseite
Die gelb gepunktete Linie ist der Tafelausschnitt, an dem das Anschlusskabel angebracht wird.
Die Schraubenlöcher sind ebenfalls dargestellt.
Verwenden Sie M3x10 Blechschrauben
Anschlusskabel RS232/REM OPSTA mit 28A2025-OAO Steward-Stecker.
Alle Abmessungen sind in Millimeter angegeben.

Drive Controlled Pump Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 32
Motor Control P1 P2 Sequencing Logic Delta p Setpoint M I P ANIN01 (X11 01) Actual pressure p 0 DIGIN01 (X13 02) DIGIN02 (X13 03) DIGIN03 (X13 04) DIGIN04 (X12 01) DIGIN05 (X12 02) RELAY 01 (X14/01 & X14/02) RELAY 02 (X14/03 & X14/04) DIGOUT 03 (X12/03) DIGOUT 04 (X12/04) Start No Stop Reset Pump1 On Off Pump2 On Off Drive running Not Tripped Bypass Valve Flow reachedCMD pressure valve Flow Setpoint PWM amax nmin max Filter P I CmdLS Valve Filter CMD LS valve I P Actual pressure LS ANIN 02 (X11/02) FilterANOUT 02 (X11/04) ANOUT 01 (X11/03) D
Dichtung Rückseite des GKP
Handbuch
Display
• Die oberste Zeile im Display zeigt den Status des Antriebs an.

• Im mittleren Bereich werden die gewählten Parameter oder das Navigationsmenü angezeigt.
• Die unterste Zeile im Display zeigt die mit den Softkeys (frei belegbare Tasten) verknüpfte Aktion an.
• Die Aktionen der Softkeys sind kontextabhängig.
• Die zentralen Navigations- und Bearbeitungstasten werden als AUF, AB, LINKS, RECHTS und OK bezeichnet.
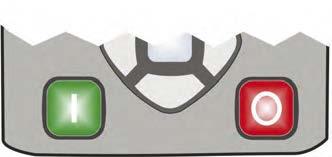
• Die Starttaste (grün) und die Stopptaste (rot) dienen zum Starten und Stoppen des Motors, wenn sich der Antrieb in der Betriebsart Lokale Steuerung befindet.
Tastenfunktionen
Taste Funktion Beschreibung
START Nur verfügbar, wenn die Betriebsart Lokale Steuerung für Start/Stopp aktiv ist. Steuerung Startet den Motor.
STOPP Steuerung stoppt den Motor, wenn die Betriebsbart Lokale Steuerung für Start/Stopp aktiv ist. Rücksetzen von Störungen führt bei Störungen einen Reset durch.
Softkey 1 Navigieren zeigt die vorherige Menüebene an. Bearbeiten Bricht die Bearbeitung ohne Änderung des Werts ab.
Softkey 2 Wechsel des Steuermodus






OK
Navigieren zeigt die nächste Menüebene bzw. den nächsten Parameter an. Wechselt bei Wahl eines Parameters in den Bearbeitungsmodus. Bearbeiten Übernimmt den Wert des angezeigten Parameters. Langes Drücken (> 1 s): zeigt Informationen über den gewählten Parameter an.
AUF Navigieren bearbeiten blättert durch die Liste der Parameter nach oben. Erhöht den Wert des angezeigten Parameters.
AB Navigieren bearbeiten blättert durch die Liste der Parameter nach unten. Verringert den Wert des angezeigten Parameters.
LINKS Navigieren bearbeiten zeigt die vorherige Menüebene an. Wählt die zu ändernde Ziffer.
RECHTS Navigieren an. Bearbeiten. Zeigt die nächste Menüebene bzw. den nächsten Parameter Wählt die zu ändernde Ziffer.
Parker Hannifin Corporation
Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 33
Drive Controlled Pump
Hydraulics
Softkey 1
Softkey 1
Handbuch
Drive Controlled Pump
Die einzelnen Zustände werden durch Symbole angezeigt:
Betrieb, Stopp und Laufrichtung
Lauf in positive Richtung
Lauf in negative Richtung
Gestoppt (Bereit für Lauf in positive Richtung)
Gestoppt (Bereit für Lauf in negative Richtung)
Störung
Antrieb hat ausgelöst (Symbol blinkt)
Warnung
Anzeige der Softkey-Aktionen
Die Verwendung der Softkeys 1 und 2 wird jeweils in der untersten Displayzeile über der betreffenden Taste durch ein Symbol angezeigt.
Softkey 1
Softkey 1 dient als Eingabe- oder Abbruchtaste.
Eingabe:
Abbruch:
Bei der Menünavigation führt diese Taste zur vorherigen Menüebene zurück. In diesem Fall hat sie die gegensätzliche Funktion der OK-Taste.
Bei der Bearbeitung eines Parameters bricht diese Taste den Vorgang ab und lässt den Parameterwert unverändert.
Umschaltung zwischen lokalem und dezentralem Modus
Ethernet
IP-Adresse fehlt (Symbol blinkt)











IP-Adresse konfiguriert
Steuerquelle
Start/Stopp-Steuerung über Keypad
Start/Stopp-Steuerung über Klemmen
Start/Stopp-Steuerung über Kommunikations-Master
Softkey 2
Softkey 2 dient zur Wahl des Modus für die Start/StoppSteuerung.
Parker
Corporation
DCP Handbuch innen A4 DE NEU.indd 31.01.17 34
Hannifin
Hydraulics Group
Linke Seite Rechte Seite Betrieb, Stopp und Laufrichtung Störung Ethernet Steuerquelle
Handbuch
LEDS
Das grafische Keypad verfügt über zwei LEDs, von denen eine die grüne Starttaste und die andere die rote Stopptaste beleuchtet. Jede LED kann unabhängig von der anderen erlöschen oder blinken.
Drive Controlled Pump
Starttasten-LED
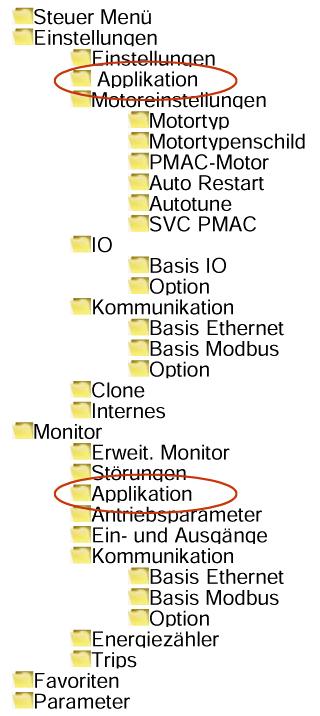
Menüübersicht
Das Menüsystem umfasst eine Reihe von Menüs und Untermenüs, die als Baumstruktur angeordnet sind. Die Navigation im Menüsystem erfolgt mit den Tasten AUF, AB, LINKS und RECHTS am grafischen Keypad (GKP). Ein-
Kurzübersicht der Menüs
Beide blinken Antrieb nicht BETRIEBSBEREIT
Grüne LED blinkt, dann die rote Antrieb im Status STÖRUNG
zelne Parameter können an mehreren Stellen im Menübaum vorkommen. Nicht erforderliche Parameter bzw. Menüs werden am GKP und auf der Webseite automatisch ausgeblendet.
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 35
Stopptasten-LED Beschreibung AUS Blinkt Anhalten AUS EIN Angehalten EIN AUS Betrieb Blinkt AUS AUTO RESTART Schwebende
Setup::Application Q Control p Control p/Q Control LS Control Accumulator Control Application Application Application Application Application App Selection App Selection App Selection App Selection App Selection Setup Pump Setup Pump Setup Pump Setup Pump Setup Pump Q Control p Control Q Control LS Control Accu Control Bypass valve Bypass valve p Control Bypass valve Bypass valve Analog Inputs Pressure valve Bypass valve Pressure valve Analog Inputs Component Prot. Analog Inputs Pressure valve Analog Inputs Component Prot. Component Prot. Analog Inputs Component Prot. Component Prot. Component Prot.
Monitor::Application Q Control p Control p/Q Control LS Control Accumulator Control Application Application Application Application Application Digital IOs Digtal IOs Digital IOs Digital IOs Digital IOs Fieldbus Fieldbus Fieldbus Fieldbus Fieldbus Testfunction Testfunction Testfunction Testfunction Testfunction Status Q Control Status p Control Status pQ Control Status LS Control Status Accu Control Controller Status Controller Status Controller Status Controller Status Speed Loop Ctrl Speed Loop Ctrl Speed Loop Ctrl Speed Loop Ctrl Speed Loop Ctrl HPU Messages HPU Messages HPU Messages HPU Messages HPU Messages
Handbuch
Controlled Pump
Die Drive Controlled Pump Applikationssoftware fügt dem grafischen Bedienteil Parameter und Menüs hinzu.
DCP Handbuch innen A4 DE NEU.indd 31.01.17 36
Drive
Parker Hannifin Corporation Hydraulics Group
Steuer Menü Q Control p Control p/Q Control L S Control Accumulator Control 1917 Flow Setpoint 1930 Pressure Setpoint 1917 Flow Setpoint 1960 Target Delta p 1932 Actual pressure 1919 Actual Flow 1932 Actual pressure 1919 Actual Flow 1961 Actual delta p LS 1949 Switch On pressure 1932 Actual pressure 1930 Pressure Setpoint 1932 Actual pressure 1950 Switch Off pressure 1932 Actual pressure 1962 Actual pressure LS Favoriten Q Control p Control p/Q Control L S Control Accumulator Control 1992 Faktor PID Pres sure Valve 1992 Faktor PID Pressure Valve 1992 Faktor PID Pressure Valve 1924 Leckage Comp. Flow 1924 Leckage Comp. Flow 1924 Leckage Comp. Flow 1924 Leckage Comp. Flow 1924 Leckage Comp. Flow Einstellungen::Applikation Menü Q Control p Control p/Q Control LS Control Accumulator Control App. Selection App. Selection App. Selection App. Selection App. Selection Setup pump Setup pump Setup pump Setup pump Setup pump Setup Q Control Setup p Control Setup Q Control Setup LS Control Setup Accu Control Bypass Valve Bypass Valve Setup p Control Bypass Valve Bypass Valve Analog Input Q Pressure Valve Bypass Valve Pressure Valve Analog Input Accu Component Protection Analog Input p Pressure Valve Analog Input LS Component Protection Component Protection Analog Input pQ Component Protection Component Protection Einstellungen::Quick Setup Menü Q Control p Control p/Q Control LS Control Accumulator Control 1900 Selected Application 1900 Selected Application 1900 Selected Application 1900 Selected Application 1900 Selected Application 1901 Pump Type 1901 Pump Type 1901 Pump Type 1901 Pump Type 1901 Pump Type 1904 Double Pump 1904 Double Pump 1904 Double Pump 1904 Double Pump 1904 Double Pump 1905 Displacement Pump1 1905 Displacement Pump1 1905 Displacement Pump1 1905 Displacement Pump1 1905 Displacement Pump1 1906 Displacement Pump2 1906 Displacement Pump2 1906 Displacement Pump2 1906 Displacement Pump2 1906 Displacement Pump2 1908 Pump speed min 1908 Pump speed min 1908 Pump speed min 1908 Pump speed min 1908 Pump speed min 1909 Pump speed max 1909 Pump speed max 1909 Pump speed max 1909 Pump speed max 1909 Pump speed max 1912 Max pressure pump1 1912 Max pressure pump1 1912 Max pressure pump1 1912 Max pressure pump1 1912 Max pressure pump1 1913 Max pressure pump2 1913 Max pressure pump2 1913 Max pressure pump2 1913 Max pressure pump2 1913 Max pressure pump2 1922 Qmax at 100% ANIN02 1922 Qmax at 100% ANIN02 1937 P max at 100% AIN02 1937 P max at 100% AIN02 1937 P max at 100% AIN02 1937 P max at 100% AIN02 1942 Upper Limit pressure 1942 Upper Limit pressure 1942 Upper Limit pressure 1942 Upper Limit pressure 1938 Max p Sensor p0 1938 Max p Sensor p0 1938 Max p Sensor p0 1938 Max p Sensor p0 1938 Max p Sensor p0 1935 Pressure Ramp up 1935 Pressure Ramp up 1935 Pressure Ramp up 1936 Pressure Ramp down 1936 Pressure Ramp down 1936 Pressure Ramp down 1990 Max p Pressure Valve 1960 Delta p Setpoint 1991 Feed Forward Pressure Valve 1963 Max p Sensor LS 1990 Max p Pressure Valve 1946 Pressure Mode 1991 Feed Forward Pressure Valve 1949 Switch On pressure 1990 Max p Pressure Valve 1950 Switch Off pressure 1991 Feed Forward Pressure Valve 1990 Max p Pressure Valve 1991 Feed Forward Pressure Valve
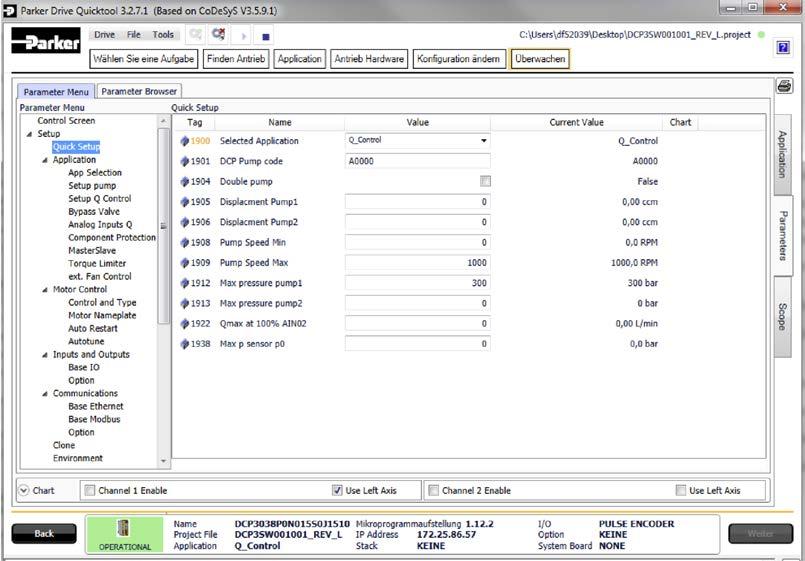
Parker Drive Quicktool (PDQ) PC-Software


So
Drive Controlled Pump
Befolgen Sie die Schritte des InstallShield-Assistenten.
DCP Handbuch innen A4 DE NEU.indd 31.01.17 37 Handbuch Monitor::Quick Monitor menu Q Control p Control p/Q Control LS Control Accumulator Control 1917 Flow Setpoint 1982 Flow Setpoint 1919 Actual flow 1919 Actual flow 1930 Pressure Setpoint 1930 Pressure Setpoint 1960 Delta p Setpoint 1961 Actual Delta p LS 1932 Actual pressure 1932 Actual pressure 1932 Actual pressure 1932 Actual pressure 1932 Actual pressure 1962 Actual pressure LS 1949 Switch On pressure 1950 Switch Off pressure 1971 Controller Output 1971 Controller Output 1971 Controller Output 1968 Pressure Controller Kp 1968 Pressure Controller Kp 1968 Pressure Controller Kp 1969 Pressure Controller Ki 1969 Pressure Controller Ki 1969 Pressure Controller Ki 1970 Pressure Controller Kd 1970 Pressure Controller Kd 1970 Pressure Controller Kd 1973 Inner window Ipart 1973 Inner window Ipart 1973 Inner window Ipart 1974 Outer window Ipart 1974 Outer window Ipart 1974 Outer window Ipart 1975 Pos. Limit Ki 1975 Pos. Limit Ki 1975 Pos. Limit Ki 1976 Neg. Limit Ki 1976 Neg. Limit Ki 1976 Neg. Limit Ki 2056 Rate Feedback 2056 Rate Feedback 2056 Rate Feedback
Parker Hannifin Corporation Hydraulics Group
Installation
starten Sie das Installationsprogramm. Laden Sie die neueste Version von unserer Website www.parker.com/ssd/pdq
Handbuch
Starten
Drive Controlled Pump
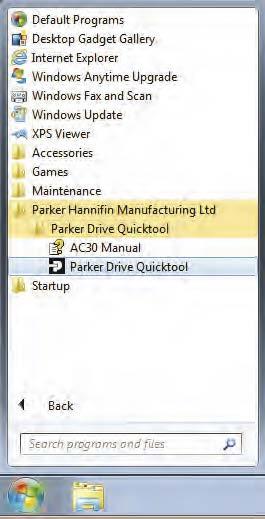
Wenn der InstallShield-Assistent abgearbeitet ist, rufen Sie das PDQ wie gezeigt über das Menü „Start“ oder vom Desktop auf, wie in Abbildung 9-2.
Voraussetzung: Ethernet Verbindung → PC Umrichter

Antrieb konfigurieren
DCP Handbuch innen A4 DE NEU.indd 31.01.17 38
Parker Hannifin Corporation Hydraulics Group
Abbildung 9-2 Desktop-Shortcut
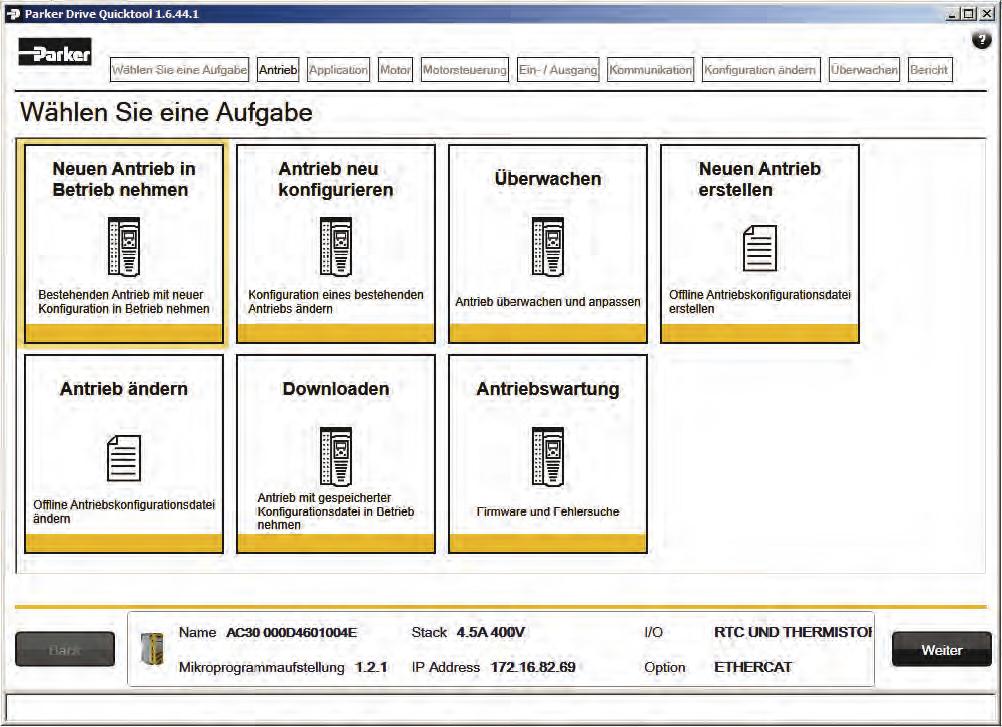
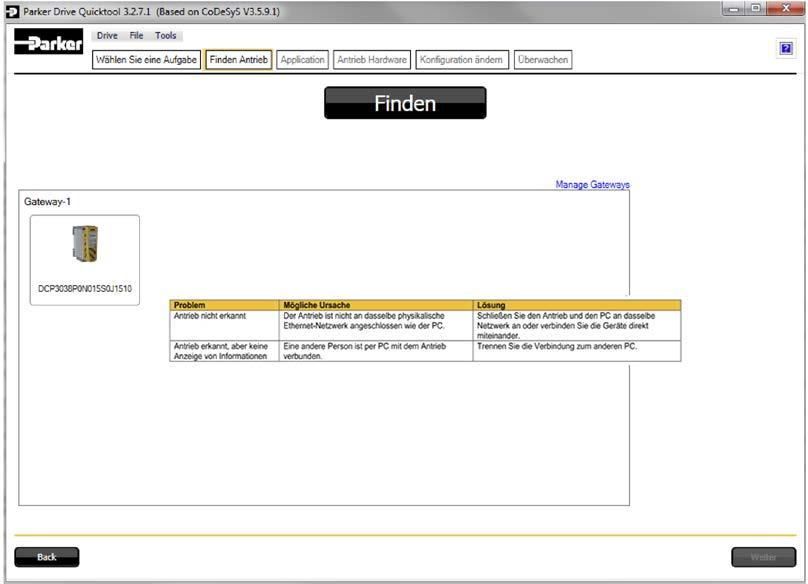
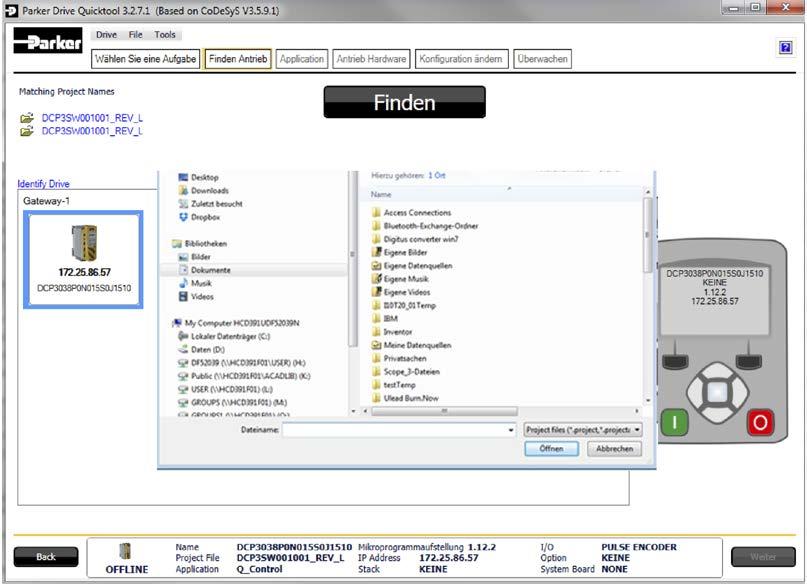
Der Assistent erkennt automatisch alle AC30V Antriebe, die über die Ethernet-Verbindungen am PC sichtbar sind. Der Vorgang dauert normalerweise 10 Sekunden. Die Benutzerschnittstelle ist derweil grau unterlegt und reagiert nicht. Sobald die Antriebserkennung abgeschlossen ist, suchen Sie Ihren Antrieb in der Liste und klicken Sie ihn an. Im Statusbereich am unteren Bildschirmrand werden Informationen über den gewählten Antrieb angezeigt. Vergewissern Sie sich, dass Sie den richtigen Antrieb gewählt haben, bevor Sie fortfahren.
Hinweis: Der Name des gewählten Antriebs stimmt mit dem Namen auf dem GKP-Startbildschirm überein. Klicken Sie auf „Weiter“, um mit der Inbetriebnahme des Antriebs zu beginnen.
Parker
Corporation
DCP Handbuch innen A4 DE NEU.indd 31.01.17 39 Handbuch
Drive Controlled Pump
Hannifin
Hydraulics Group
Handbuch
Applikationsprogramm öffnen
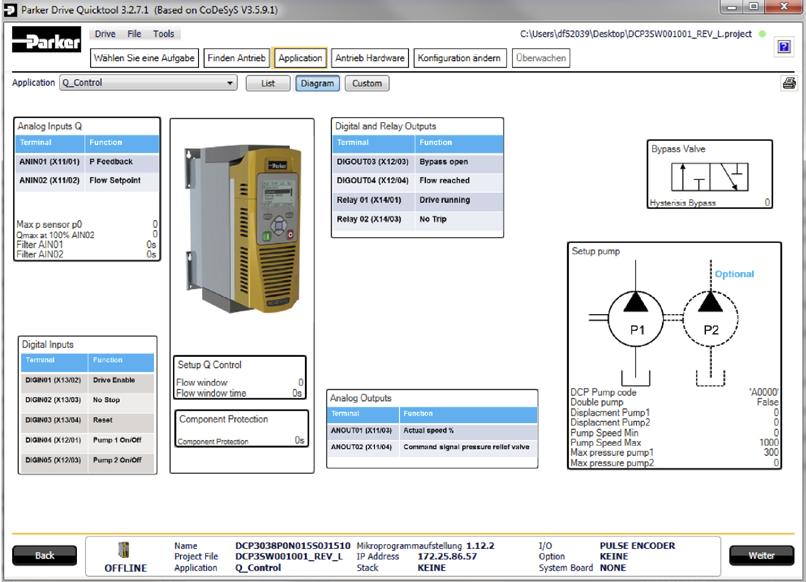
Applikation auswählen
 Drive Controlled Pump
Drive Controlled Pump
DCP Handbuch innen A4 DE NEU.indd 31.01.17 40
Parker Hannifin Corporation Hydraulics Group
Handbuch
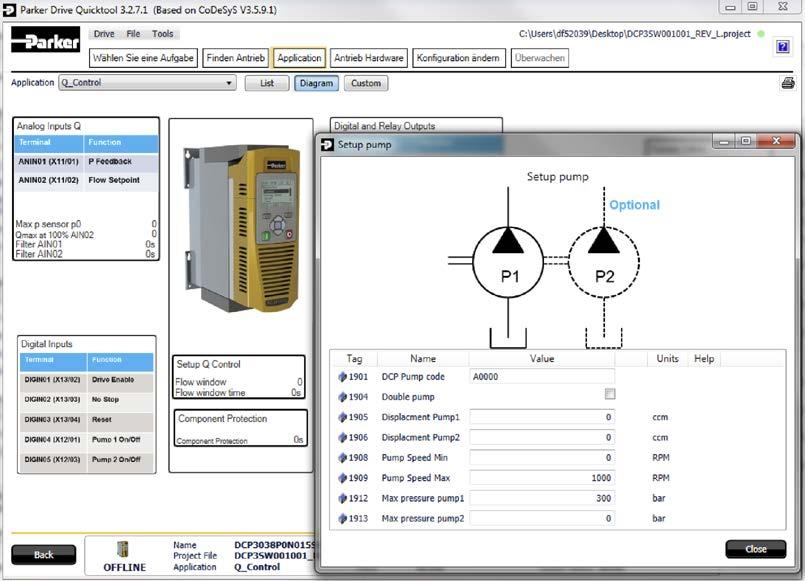
Applikationsparameter eingeben
Drive Controlled Pump
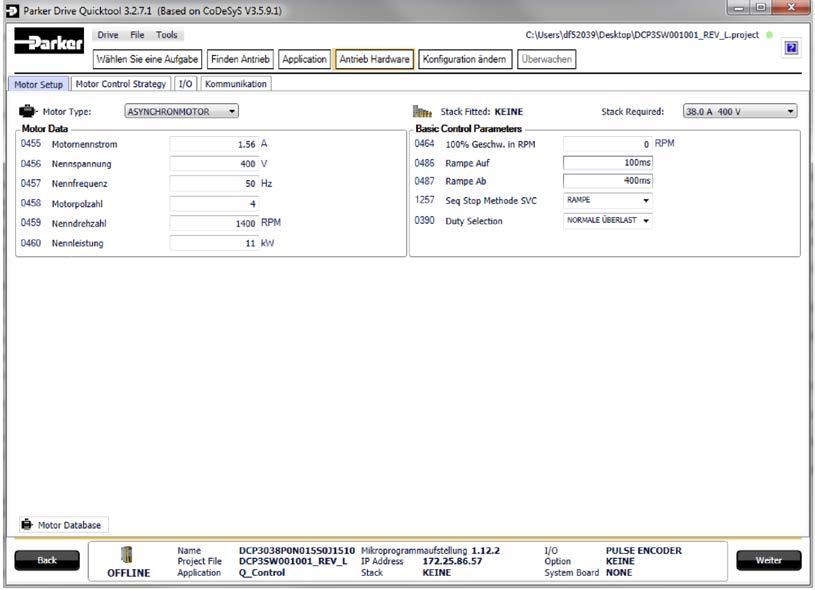
Motordaten, Regelverhalten, IOs und Kommunikation eingeben
Kundenspezifische Motordaten laut Motortypenschild, Regelverhalten, I/Os und Kommunikation eingeben.
DCP Handbuch innen A4 DE NEU.indd 31.01.17 41
Parker Hannifin Corporation Hydraulics Group
Durch Anklicken des entsprechenden Symbols können Applikationsparameter gesetzt werden.
Handbuch
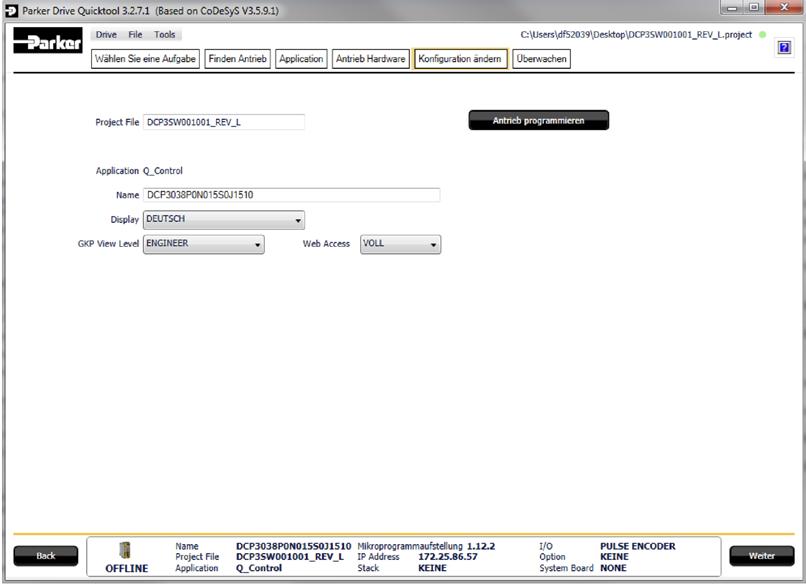
Antrieb programmieren
Drive Controlled Pump
In diesem Schritt werden Ihre Einstellungen in den Antrieb übernommen. Links kann dem Antrieb noch ein Name vergeben werden.
Antrieb optimieren
Unter Parameter können die entsprechenden Optimierungsparameter gesetzt werden.
Parker Hannifin Corporation Hydraulics
DCP Handbuch innen A4 DE NEU.indd 31.01.17 42
Group
Handbuch
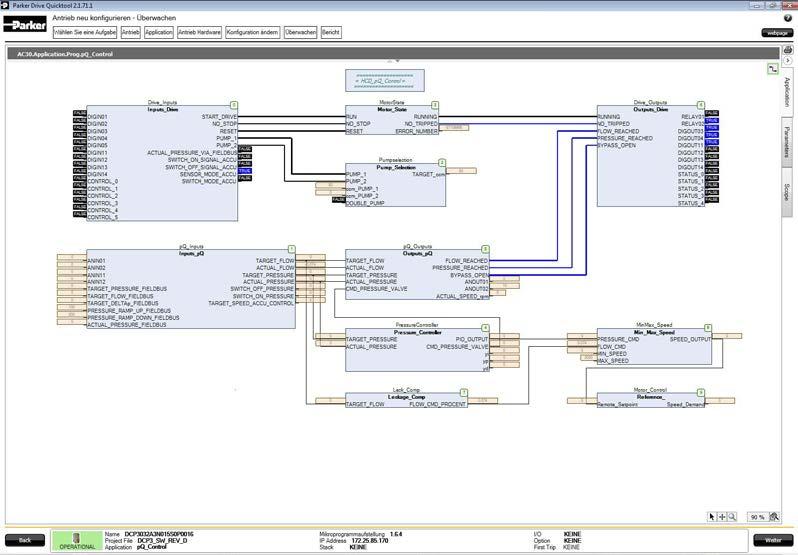
Antrieb optimieren
Drive Controlled Pump
Unter Applikation können Sie sich den Verlauf und Zustand der aktiven Applikation ansehen.
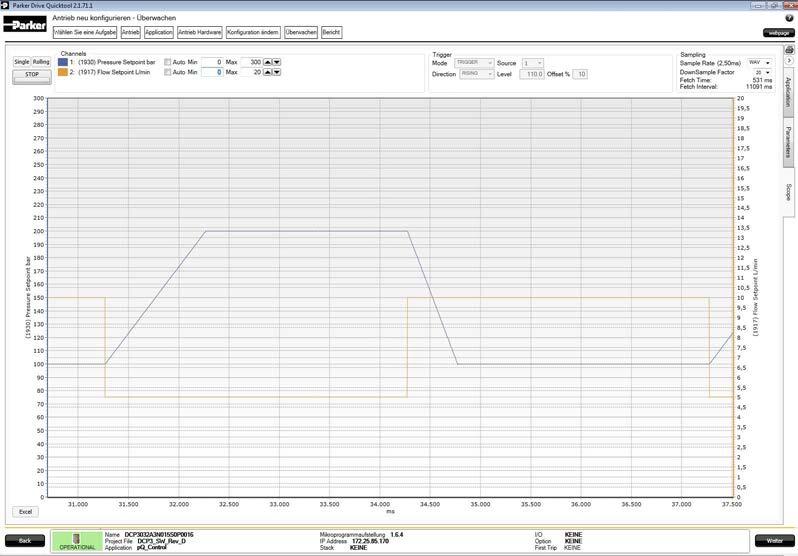
Antrieb optimieren
Unter Scope kann der Verlauf von Statuswerten angesehen und gespeichert werden. Ein Exportieren als Excel-Datei ist auch möglich.
Parker
DCP Handbuch innen A4 DE NEU.indd 31.01.17 43
Hannifin Corporation Hydraulics Group
Handbuch
Parameterbeschreibung
Betriebsart auswählen
Drive Controlled Pump
Über diesen Parameter wird die Betriebsart ausgewählt. In Abhängigkeit der Betriebsart ändert sich die Anschlussbelegung.
PNO
Parameter Descriptions
1900
Selected Application
Auswahlliste der verschiedenen Drive Controlled Pump Betriebsarten:
0: Q CONTROL
Volumenstromregelung
1: p CONTROL Druckregelung
2: p/Q CONTROL
3: LS CONTROL
4: ACCUMULATOR CONTROL
Beschreibung
Setup::Application::App Selection
Volumenstromregelung mit überlagerter Druckregelung
Load sensing
Speicherladefunktion mit Drucksensor oder Zweipunkt-Druckschalter
Die Betriebsart kann durch den Parameter „Selected Application“ nur ausgewählt werden, wenn der AC30V im Konfigurationsmodus ist. Die auf der grafischen Benutzeroberfläche (GKP) angezeigten Menüs und Parameter sind abhängig von der gewählten Betriebsart. Nicht benötigte Parameter werden nicht angezeigt.
Pumpeneinstellungen
Über diese Parameter werden die Pumpen konfiguriert.
Menüpunkt
Setup::Application::Setup pump
PNO 1901 1904 1905 1906
Parametername Pump type Double pump Displacement pump1 Displacement pump2
Parameterbeschreibung Pumpentype wird über die letzten 5 Stellen des DCP-Codes parametriert
Funktion Durch die Auswahl des entsprechenden Pumpentyps, werden alle relevanten Pumpenparameter wie Fördervolumen (Displacement), Min./Max.-Geschwindigkeit (Speed), Max.-Druck (pressure) und Doppelpumpe (Double pump) (Ja/Nein) automatisch gesetzt.
Einzel- oder Doppelpumpe Fördervolumen Pumpe 1 in cm³/U
Wird die Pumpe nicht über den DCP-Code konfiguriert, wird über diesen Parameter zwischen Einzelbzw. Doppelpumpe (Double pump) unterschieden. DCPCode muss auf Default gesetzt sein (DCPxxxxxxxxxxxA0000).
Fördervolumen Pumpe 2 in cm³/U
Wird die Pumpe nicht über den DCP-Code konfiguriert, wird über diesen Parameter das Fördervolumen (Displacement) der Pumpe 1 gesetzt. DCP-Code muss auf Default gesetzt sein (DCPxxxxxxxxxxxA0000).
Wird die Pumpe nicht über den DCP-Code konfiguriert, wird über diesen Parameter das Fördervolumen (Displacement) der Pumpe 2 gesetzt. DCP-Code muss auf Default gesetzt sein (DCPxxxxxxxxxxxA0000).
Funktion Wird die Pumpe nicht über den DCP-Code konfiguriert, wird über diesen Parameter die Min.-Drehzahl (Speed) des Antriebs gesetzt. Handelt es sich um eine Doppelpumpe, muss die höhere Min.Drehzahl der Pumpe verwendet werden. DCP-Code muss auf Default gesetzt sein (DCPxxxxxxxxxxxA0000).
Wird die Pumpe nicht über den DCP-Code konfiguriert, wird über diesen Parameter die Max.-Drehzahl (Speed) des Antriebs gesetzt. Handelt es sich um eine Doppelpumpe, muss die geringere Max.-Drehzahl der Pumpe verwendet werden. DCPCode muss auf Default gesetzt sein (DCPxxxxxxxxxxxA0000).
Wird die Pumpe nicht über den DCP-Code konfiguriert, wird über diesen Parameter der Max.-Druck (pressure) der Pumpe 1 gesetzt. Bei Doppelpumpe (Double pump) wird der max. Druck über die Pumpenauswahl gesetzt. DCP-Code muss auf Default gesetzt sein (DCPxxxxxxxxxxxA0000).
Wird die Pumpe nicht über den DCP-Code konfiguriert, wird über diesen Parameter der Max.-Druck (pressure) der Pumpe 2 gesetzt. Bei Doppelpumpe wird der Max.Druck über die Pumpenauswahl gesetzt. DCP-Code muss auf Default gesetzt sein (DCPxxxxxxxxxxxA0000).
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 44
Menüpunkt Setup::Application::Setup pump PNO 1908 1909 1912 1913 Parametername Pump speed min Pump speed max Max pressure pump 1 Max pressure pump 2 Parameterbeschreibung Min Drehzahl der Pumpen in rpm Max Drehzahl der Pumpen in rpm Max Druck der Pumpe 1 in bar Max Druck der Pumpe 2 in bar
Handbuch
Einstellungen Volumenstromsteuerung
Drive Controlled Pump
der Pumpe/Pumpen Sollvolumenstrom der Pumpe/Pumpen Istvolumenstrom der Pumpe/ Pumpen Sollvolumenstrom der Pumpe/Pumpen
Funktion Zeigt den aktuellen Sollvolumenstrom. Dieser ergibt sich aus dem Eingangssignal ANIN02 oder der entsprechenden Kommunikationsschnittstelle.
Zeigt den aktuellen Sollvolumenstrom der entsprechenden Kommunikationsschnittstelle.
Zeigt den aktuellen Istvolumenstrom. Der Istvolumenstrom wird aus der aktuellen Drehzahl berechnet.
Fensterbreite (+/-) für die Meldung “Volumenstrom erreicht“ (Flow reached).
Funktion Fensterzeit für die Meldung “Volumenstrom erreicht“ (Flow reached).
Einstellungen Druckregelung
Funktion Zeigt den aktuellen Solldruck. Dieser ergibt sich aus dem Eingangssignal ANIN02 (p,LS) oder ANIN11 (pQ), oder der entsprechenden Kommunikationsschnittstelle.
Beschreibt den Sollvolumenstrom bei 100 % Eingangssignal an Analogeingang 02 in l/min.
Wird auf TRUE gesetzt, wenn Volumenstromabweichung < Fenster Volumenstrom (Flow window) ist.
bei steigendem Systemdruck
Zeigt die Volumenstromerhöhung bei steigendem Systemdruck.
für die Meldung “Druck erreicht“ (Pressure reached).
Zeigt den aktuellen Solldruck der entsprechenden Kommunikationsschnittstelle.
Zeigt den aktuellen Istdruck p0 an ANIN01, bei angeschlossenem Sensor.
Fensterbreite (+/-) für die Meldung “Druck erreicht“ (Pressure reached).
Ab
Druckaufbau (Pressure ramp up) in bar/s.
Druckabbau (Pressure ramp down) in bar/s.
Beschreibt den Solldruck bei 100 % Eingangssignal an Analogeingang 02 (p,LS Control) 11 (pQ Control) in bar.
Menüpunkt Setup::Application:: Analog Inputs Monitor::Application:: Digital IOs Setup::Application:: Setup p,LS,Accu,pQ Control
PNO 1938 1939 1940 1942
Parametername Max p Sensor p0
Parameterbeschreibung
Pressure reached (p,LS Control)
Pressure reached (pQ Control) Upper Limit pressure
Eingangsskalierung Drucksensor Druck erreicht Druck erreicht Maximaldruck
Funktion Mit diesem Parameter wird der Max.-Druck des Drucksensor bei 100 % Eingangssignal in bar festgelegt.
Wird auf TRUE gesetzt, wenn Druckabweichung < Fenster Druck (Pressure window) ist.
Wird auf TRUE gesetzt, wenn Druckabweichung < Fenster Druck (Pressure window) ist.
Begrenzt den Maximaldruck des Antriebs. Ist Maximaldruck > max pressure pump1/2, wird Maximaldruck = max pressure pump1/2.
Parker Hannifin Corporation
Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 45
Hydraulics
Menüpunkt Monitor::Application:: Status Q,p/Q Control Monitor::Application:: Fieldbus Monitor::Application:: Status Q,p/Q Control Monitor::Application:: Status Q Control PNO 1917 1918 1919 1920 Parametername Flow Setpoint Flow Setpoint Fieldbus Actual Flow Flow window Parameterbeschreibung Sollvolumenstrom
Menüpunkt Monitor::Application:: Status Q Control Setup::Application:: Analog Inputs Monitor::Application:: Digital IOs Favoriten: PNO 1921 1922 1923 1924 Parametername Flow window time Qmax at 100% AIN02 Flow reached Leakage Comp. Flow Parameterbeschreibung Fensterzeit für Volumenstrom erreicht Sollwerteingangsskalierung “Volumenstrom
Volumenstromaufschaltung
erreicht“
Menüpunkt Monitor::Application:: Status p,LS,p/Q Control Monitor::Application:: Fieldbus Monitor::Application:: Status p,LS,Accu,Q,p/Q Control Setup::Application:: Setup p,LS,pQ Control PNO 1930 1931 1932 1933 Parametername Pressure Setpoint Pressure Setpoint Fieldbus Actual pressure p0 Pressure window Parameterbeschreibung Solldruck Solldruck Istdruck p0 Fenster für “Druck erreicht“
Menüpunkt Setup::Application:: Setup p,LS,pQ Control Setup::Application:: Analog Inputs PNO 1934 1935 1936 1937 Parametername Pressure window time Pressure ramp up Pressure ramp down Pmax at 100% AIN02/AIN11 Parameterbe-
Fensterzeit
Druckrampe
Druckrampe
Sollwerteingangsskalierung
Funktion
schreibung
für “Druck erreicht“
Auf
Druck
Fensterzeit
Handbuch
Einstellungen Speicherladebetrieb
Drive Controlled Pump
Parameterbeschreibung Modus für Speicherladebetrieb Betriebsart für Speicherladebetrieb Betriebsart für Speicherladebetrieb
Funktion Umschaltung zwischen Drucksensorbetrieb AIN01 oder Druckschalterbetrieb DIGIN04 (Einschaltsignal) und DIGIN05 (Abschaltsignal). Ist der Parameter auf TRUE, ist Druckschalterbetrieb aktiviert.
Parameter wird TRUE, wenn Drucksensorbetrieb gewählt ist (Pressure Switch Mode = FALSE).
Parameter wird TRUE, wenn Druckschalterbetrieb gewählt ist (Pressure Switch Mode = TRUE).
Einschaltdruck Speicherladebetrieb
Beim Erreichen dieses Druckes geht der Antrieb auf die vorgegebene Maximaldrehzahl.
Parameterbeschreibung
Speicherladebetrieb
Funktion Beim Erreichen dieses Druckes geht der Antrieb auf die vorgegebene Minimaldrehzahl bzw. schaltet ab.
Beim Überschreiten der Anzahl zur kurzer Ladevorgänge wird eine Warnung generiert.
Beim Überschreiten der Anzahl zur kurzer Ladevorgänge wird ein Fehler generiert.
Parametername
Parameterbeschreibung
Funktion Anzahl der Ladevorgänge mit Pausenzeiten kleiner als der in Parameter 1953 angegebene Zeit.
Hinweis: Parameter 1951–1955 ab: DCP3_SW_REV_J
Einstellungen Load-Sensing-Betrieb
Funktion Hier wird das Soll-Delta-p in bar eingetragen.
das aktuelle Delta-p (p0 – pLS) an.
Minimale Zeit zwischen 2 Speicherladezyklen.
den aktuellen
LS an AIN02 an. Mit
Parameter wird der Max.-Druck des Drucksensor an AIN02 bei 100 % Eingangssignal in bar festgelegt.
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 46
Menüpunkt Setup::Application:: Setup Accu Control Monitor::Application::Status Accu Control Setup::Application:: Setup Accu Control PNO 1946 1947 1948 1949 Parametername Pressure Switch Mode Sensor Mode On Switch Mode On Switch On pressure
Setup::Application::Setup Accu Control PNO 1950 1951 1952 1953 Parametername Switch Off pressure Count T short warning Count T short error Tmin OnOff Ctrl
Menüpunkt
Abschaltdruck
Menüpunkt Setup::Application::Setup Accu Control PNO 1954 1955
Actl
time
Reset Accu Error
count
short
Menüpunkt Setup::Application:: Setup LS Control Monitor::Application:: Status LS Control Setup::Application:: Setup Accu Control PNO 1960 1961 1962 1963 Parametername Delta p Setpoint Actual delta p LS Actual pressure LS Max p Sensor LS Parameterbeschreibung Soll Delta p Ist Delta p Istdruck Sensor LS Eingangsskalierung Drucksensor LS
Zeigt
Zeigt
Druck
diesem
Handbuch
Einstellungen Druckregler
Drive Controlled Pump
Solldruck-Istdruck bzw. Soll delta p-Ist delta p.
Begrenzt den Arbeitsbereich des Integrierers für den Druckregler bei zu geringen Regelabweichungen.
Begrenzt den Arbeitsbereich des Integrierers für den Druckregler bei zu großen Regelabweichungen.
Legt die obere Begrenzung des I-Anteils fest.
Menüpunkt Monitor::Application:: Status p, LS, pQ Control Monitor::Application:: Controller Status
PNO 1976 1977 1978 1982
Parametername Neg. Limit Ki Rate Feedback Pressure Controller Td Controller yp
Parameterbeschreibung Negative Grenze I-Anteil Geschwindigkeitsaufschaltung Zeitkonstante Differenzierer Stellsignal yp
Funktion Legt die untere Begrenzung des I-Anteils fest.
Faktor für die Istgeschwindigkeitsaufschaltung auf das Reglerausgangssignal. Min.Drehzahl der Pumpe wird kompensiert. Bessere Auswirkung des Reglerausgangssignals.
Menüpunkt Monitor::Application:: Controller Status Monitor::Application:: Controller Status
PNO 1983 1984
Parametername Controller yi Controller yd
Parameterbeschreibung Stellsignal yi Stellsignal yd
Funktion Zeigt den aktuellen Integriereranteil des Reglerausgangs.
Einstellungen Druckventil
Zeigt den aktuellen Differenziereranteil des Reglerausgangs.
Differenzierer Zeit in ms. Zeigt den aktuellen Proportionalanteil des Reglerausgangs.
Menüpunkt Setup::Application::Pressure Valve Favoriten: PNO 1990 1991 1992
Parametername Max p Pressure Valve Feed Forward pressure Valve Faktor PID pressure Valve
Parameterbeschreibung Maximal Druck Druckbegrenzungsventil Druckvorsteuerung Druckbegrenzungsventil Verstärkungsfaktor Regler Druckventil
Funktion Legt den Maximaldruck des Druckbegrenzungsventils bei 100 % Ansteuersignal fest.
Dieser Wert dient zur proportionalen Vorsteuerung des Druckventils. Bestimmt die Regelreserve des Druckventils. Öffnet das Druckventil bereits bevor der Antrieb die minimale Drehzahl erreicht hat, muss der Vorsteuerwert erhöht werden.
Verbessert die Auflösung der Reglerausgangsgröße für das Druckventil.
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 47
Menüpunkt Setup::Application::Status p,LS,pQ Control Monitor::Application:: Status p,LS,pQ Control PNO 1968 1969 1970 1971 Parametername Pressure Controller Kp Pressure Controller Ki Pressure Controller Kd Controller Output Parameterbeschreibung P-Anteil Druckregler I-Anteil Druckregler D-Anteil Druckregler Regler Ausgangssignal Druckregler Funktion P-Anteil des Druckreglers in %/bar. I-Verstärkung des Druckreglers in %/bar. D-Verstärkung des Druckreglers in %/bar. Reglerausgangssignal (yp+yi+yd) in %/bar. Menüpunkt Monitor::Application:: Controller Status Monitor::Application:: Status p, LS, pQ Control PNO 1972 1973 1974 1975 Parametername Tracking Error Inner window Ipart Outer window Ipart Pos. Limit Ki Parameterbeschreibung Regelfehler pSoll-pIst Inneres Fenster I-Anteil Äußeres Fenster I-Anteil Positive Grenze I-Anteil Funktion Zeigt den Regelfehler
Handbuch
Einstellungen Bypassventil
Drive Controlled Pump
Funktion Hysterese zum Schließen des Bypass Ventils nach dem Öffnen. Schließen = Min.-Drehzahl, öffnen = Min.-Drehzahl + Hysterese.
Einstellungen Analog-/Digitaleingänge
Parameter wird auf TRUE gesetzt, sobald DOUT03 für öffnen Bypass Ventil gesetzt ist.
Funktion Filter des Analogwertes AIN01 (Drucksensor p0).
Filter des Analogwertes AIN02 Soll Q (Q Control) bzw. Soll p (p Control).
Filter des Analogwertes AIN11 Soll p (pQ Control).
Parameter wird auf TRUE gesetzt, sobald der Antrieb über DIN01 bzw. Control.0 gestartet wurde.
Funktion
Parameter wird auf TRUE gesetzt, sobald der Antrieb über DIN02 bzw. Control.1 auf kein Stop gesetzt ist.
Einstellungen Relais-Ausgänge
Parameterbeschreibung
Parameter wird auf TRUE gesetzt, sobald Fehler quittiert über DIN03 bzw. Control.2 gesetzt ist.
Parameter wird auf TRUE gesetzt, wenn Pumpe 1 angewählt (Q,p,pQ,LS Control) oder der Einschaltdruck (Accu Control) gesetzt ist.
Parameter wird auf TRUE gesetzt, wenn Pumpe 2 angewählt (Q,p,pQ,LS Control) oder der Abschaltdruck (Accu Control) gesetzt ist.
No Drive Error Relay02
Antrieb läuft Relaisausgang01
Funktion Parameter wird auf TRUE gesetzt, sobald der Antrieb freigegeben ist und sich nicht im Fehlerzustand befindet.
Einstellungen Feldbus
Kein Fehler active Relaisausgang02
Parameter wird auf TRUE gesetzt, wenn der Antrieb sich aktuell nicht im Fehlerzustand befindet.
Menüpunkt Monitor::Application:: Fieldbus
PNO 2021 2022
Parametername Control Word Status Word
Parameterbeschreibung
Steuerwort Zustandswort
Funktion Zeigt das aktuelle Steuerwort. Zeigt das aktuelle Zustandswort.
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 48
Menüpunkt Monitor::Application::Digital IOs PNO 2004 2005 2006 2007 Parametername No Stop Reset Pump 1 or switch On Pump 2 or switch Off Parameterbeschreibung Kein Stop Fehler Quittieren Pumpe 1 oder Einschaltdruck Pumpe 2 oder Abschaltdruck
Menüpunkt Setup::Application::Bypass Valve PNO 1995 1996 Parametername Hysteresis Bypass Bypass open Parameterbeschreibung Hysterese für Bypassventil Bypass Ventil geöffnet
Menüpunkt Setup::Application::Analog Inputs Monitor::Application:: Digital IOs PNO 2000 2001 2002 2003 Parametername Filter Analog Input01 Filter Analog Input02 Filter Analog Input11 Start
schreibung Filter
Analogeingang
Filter für Analogeingang
Filter für Analogeingang 11 Start
Parameterbe-
für
01
02
Monitor::Application::Digital
PNO
Parametername
Menüpunkt
IOs
2010 2011
Drive Running Relay01
Handbuch
Einstellungen Testfunktion
Drive Controlled Pump
Funktion Ersetzt DIN01. Über diesen Parameter kann der Antrieb ohne DIN01 gestartet werden. Parameter dient nur zu Testzwecken.
Ersetzt DIN02. Über diesen Parameter kann kein Stop gesetzt werden. Parameter dient nur zu Testzwecken.
Ersetzt DIN03. Über diesen Parameter kann ein anstehender Fehler quittiert werden, falls quittierbar. Parameter dient nur zu Testzwecken.
Ersetzt DIN04. Über diesen Parameter kann Pumpe1 zubzw. abgeschaltet werden. Für diese Funktion muss eine Doppelpumpe konfiguriert sein. Parameter dient nur zu Testzwecken.
Funktion Ersetzt DIN05. Über diesen Parameter kann Pumpe2 zubzw. abgeschaltet werden. Für diese Funktion muss eine Doppelpumpe konfiguriert sein. Parameter dient nur zu Testzwecken.
Ersetzt DIN04 beim Speicherladebetrieb. Über diesen Parameter kann der Einschaltdruck simuliert werden. Für diese Funktion muss als Applikation Accu Control konfiguriert sein. Parameter dient nur zu Testzwecken.
Ersetzt DIN05 beim Speicherladebetrieb. Über diesen Parameter kann der Abschaltdruck simuliert werden. Für diese Funktion muss als Applikation Accu Control konfiguriert sein. Parameter dient nur zu Testzwecken.
Über diesen Parameter kann eine Testbewegung gestartet werden. Externe Sollwerte für Q und p werden überschrieben. Sollwerte werden über die Parameter 2041 bis 2045 eingetragen.
Funktion Druck 1 für Testbewegung in bar. Die Druckrampen in bar/s werden aus der Einstellung (Setup) Setup p Control übernommen.
Menüpunkt Monitor::Application:: Testfunction
PNO 2045
Parametername Time Testmovement
Parameterbeschreibung Zeit für Testbewegung
Funktion Zeit in s zwischen P1 und P2 bzw. Q1 und Q2
Einstellungen Komponentenschutz
Druck 2 für Testbewegung in bar. Die Druckrampen in bar/s werden aus der Einstellung (Setup) Setup p Control übernommen.
Volumenstrom 1 für Testbewegung in l/min. Der Anstieg ergibt sich aus den Rampen der Motoreinstellungen.
Volumenstrom 2 für Testbewegung in l/min. Der Anstieg ergibt sich aus den Rampen der Motoreinstellungen.
Menüpunkt Setup::Application:: Component Protection
PNO 2050
Parametername Component Protection
Parameterbeschreibung Komponentenschutz
Funktion Dient zum Schutz für Motor/Pumpe. Über diesen Parameter kann ein Überhitzen Motor/Pumpe bei min. Drehzahl ausgeschlossen werden. Steht der Antrieb über die in diesem Parameter eingestellte Zeit (s) auf min. Drehzahl, schaltet der Antrieb ab und muss über den Start neu gestartet werden.
Einstellungen Trip Status
Menüpunkt Monitor::Quick Monitor
PNO 2051
Parametername Trip Status
Parameterbeschreibung Fehleranzeige
Funktion Zeigt den aktuellen Fehlerzustand.
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 49
Menüpunkt Monitor::Application::Testfunction PNO 2034 2035 2036 2040 Parametername DIGIN05 Pump2 DIGIN04 Switch On DIGIN05 Switch Off Testmovement Parameterbeschreibung Anwählen Pumpe 2 Einschaltdruck Speicherladen Abschaltdruck Speicherladen Testbewegung
Menüpunkt Monitor::Application::Testfunction PNO 2030 2031 2032 2033 Parametername DIGIN01 Start DIGIN02 No Stop DIGIN03 Reset DIGIN04 Pump1 Parameterbeschreibung Starten Kein Stop Fehler Quitierung Anwählen Pumpe 1
Menüpunkt Monitor::Application::Testfunction PNO 2041 2042 2043 2044 Parametername P1 Testmovement P2 Testmovement Q1 Testmovement Q2 Testmovement
schreibung Druck 1 Testbewegung Druck 2 Testbewegung Volumenstrom 1 Testbewe-
Volumenstrom 2 Testbewe-
Parameterbe-
gung
gung
Handbuch
Einstellungen Hydraulic Power Units
Menüpunkt
No warning
Parameterbeschreibung Keine Warnung Verschmutzungsanzeige (Filter)
Funktion Wird TRUE, sobald Warnung Verschmutzungsanzeige besteht.
Drive Controlled Pump
Kein Fehler Verschmutzungsanzeige (Filter) Keine Warnung Oil Niveau Kein Fehler Oil Niveau
Wird TRUE, sobald Fehler Verschmutzungsanzeige besteht.
Menüpunkt Monitor::Application:: HPU Messages
PNO 2057 2058
Parametername HPU Temp. No warning HPU Temp. No error
Parameterbeschreibung Keine Warnung Oil Temperatur Kein Fehler Oil Temperatur
Funktion Wird TRUE, sobald Warnung Oil Temperatur besteht.
Wird TRUE, sobald Fehler Oil Temperatur besteht.
Wird TRUE, sobald Warnung Oil Niveau besteht. Wird TRUE, sobald Fehler Oil Niveau besteht.
Parker
Corporation
DCP Handbuch innen A4 DE NEU.indd 31.01.17 50
Hannifin
Hydraulics Group
PNO
2054 2055 2056
Monitor::Application:: HPU Messages
2053
Parametername HPU Cont.
HPU Cont. No error HPU Oil No warning HPU Oil. No error
Handbuch
Drive Controlled Pump
DCP Handbuch innen A4 DE NEU.indd 31.01.17 51
Parker Hannifin Corporation Hydraulics Group
Parameterliste PNO Name Path(s) Type Default Range Units WQ Selected App 1900 Selected Application Setup::Application::App Selection USINT (enum) 0 0: Q CONTROL CONFIG ALL 1: p CONTROL 2: p/Q Control 3: LS Control 4: ACCUMULATOR CONTROL 1901 Pump type Setup::Application::Setup pump::Pump type String DCP3xxxA0000 STOPPED ALL 1904 Double Pump Setup::Application::Setup pump::Double pump BOOL FALSE STOPPED ALL 1905 Displacement Pump1 Setup::Application::Setup pump::Displ. Pump1 REAL 0 0 to 1000 CCM STOPPED ALL 1906 Displacement Pump2 Setup::Application::Setup pump::Displ. Pump2 REAL 0 0 to 1000 CCM STOPPED ALL 1908 Pump Speed min RPM Setup::Application::Setup pump::Pump Speed Min REAL 0 0 to 3000 RPM ALWAYS ALL 1909 Pump Speed max RPM Setup::Application::Setup pump::Pump Speed Max REAL 1000 0 to 6000 RPM ALWAYS ALL 1912 Max pressure pump1 Setup::Application::Setup pump::Max pressure pump1 REAL 0 0 to 500 BAR ALWAYS ALL 1913 Max pressure pump2 Setup::Application::Setup pump::Max pressure pump2 REAL 0 0 to 500 BAR ALWAYS ALL 1917 Flow Setpoint Monitor::Application::Q Control REAL 0 0 to 1000 LPM NEVER Q , pQ Monitor::Application::p/Q Control 1918 Flow Setpoint Fieldbus Monitor:Application:Fieldbus REAL 0 0 to 1000 LPM ALWAYS Q , pQ 1919 Actual Flow Monitor::Application::Q Control REAL 0 0 to 1000 LPM NEVER Q , pQ Monitor::Application::p/Q Control 1920 Flow window Setup::Application::Q Control REAL 0 0 to 1000 LPM ALWAYS Q , pQ 1921 Flow window time Setup::Application::Q Control TIME 0 0 to 60 S ALWAYS Q , pQ 1922 Qmax at 100% AIN02 Setup::Application::Analog Input Q REAL 0 0 to 1000 LPM ALWAYS Q , pQ Setup::Application::Analog Input pQ 1923 Flow reached Monitor::Application::Digital IOs BOOL FALSE NEVER LS 1924 Leakage Comp. Flow Favourites REAL 0 0 to 100 LPM NEVER ALL 1930 Pressure Setpoint Monitor::Application::p Control REAL 0 0 to 500 BAR NEVER p, p/Q. LS Monitor::Application::p/Q Control Monitor::Application::LS Control 1931 Pressure Setpoint Fieldbus Monitor:Application:Fieldbus REAL 0 0 to 500 BAR ALWAYS p, p/Q. LS 1932 Actual pressure p0 Monitor::Application::Q Control REAL 0 0 to 500 BAR NEVER ALL Monitor::Application::p Control Monitor::Application::p/Q Control Monitor::Application::LS Control Monitor::Application::Accu Control 1933 Pressure window Setup::Application::p Control REAL 0 0 to 500 BAR ALWAYS p, p/Q. LS Setup::Application::p/Q Control Setup::Application::LS Control 1934 Pressure window time Setup::Application::p Control TIME 0 0 to 60 S ALWAYS p, p/Q. LS Setup::Application::p/Q Control Setup::Application::LS Control 1935 Pressure ramp up Setup::Application::p Control REAL 0 0 to 10000 BAR ALWAYS p, p/Q. LS Setup::Application::p/Q Control Setup::Application::LS Control 1936 Pressure ramp down Setup::Application::p Control REAL 0 0 to 10000 BAR ALWAYS p, p/Q. LS Setup::Application::p/Q Control Setup::Application::LS Control 1937 P amx at 100% Setup::Application::Analog Input p REAL 0 0 to 500 BAR ALWAYS p, p/Q. LS Setup::Application::Analog Input pQ Setup::Application::Analog Input LS
Handbuch
Drive Controlled Pump
DCP Handbuch innen A4 DE NEU.indd 31.01.17 52
Parker Hannifin Corporation Hydraulics Group
PNO Name Path(s) Type Default Range Units WQ Selected App 1938 Max p sensor p0 Setup::Application::Analog Input Q REAL 0 0 to 500 BAR ALWAYS ALL Setup::Application::Analog Input p Setup::Application::Analog Input pQ Setup::Application::Analog Input LS Setup::Application::Analog Input Accu 1939 Pressure reached p,LS Control WARNING BOOL FALSE NEVER p , LS Monitor::Application::Digital IOs 1940 Pressure reached pQ Monitor::Application::Digital IOs BOOL FALSE NEVER pQ 1941 Min outlet pressure REAL 0 0 to 100 BAR ALWAYS 1942 Upper Limit pressure Setup::Application::p Control REAL 0 0 to 500 BAR ALWAYS p, p/Q. LS Setup::Application::p/Q Control Setup::Application::LS Control 1946 Pressure Switch Mode Setup::Application::Accu Control BOOL FALSE ALWAYS Accu 1947 Sensor Mode On Monitor::Application::Status Accu Control BOOL FALSE NEVER Accu 1948 Switch Mode On Monitor::Application::Status Accu Control BOOL FALSE NEVER Accu 1949 Switch On pressure Setup::Application::Accu Control REAL 0 0 to 500 BAR ALWAYS Accu 1950 Switch Off pressure Setup::Application::Accu Control REAL 0 0 to 500 BAR ALWAYS Accu 1951 Count T short warning INT 0 ALWAYS 1952 Count T short error INT 0 ALWAYS 1953 T min OnOff control TIME 0 S ALWAYS 1954 Actual Count time short INT 0 ALWAYS 1955 Accu min pump speed INT 0 RPM ALWAYS 1960 Delta p Setpoint Setup::Application::LS Control REAL 0 0 to 500 BAR ALWAYS LS 1961 Actual delta p LS Monitor::Application::Status LS Control REAL 0 0 to 500 BAR NEVER LS 1962 Actual pressure LS Monitor::Application::Status LS Control REAL 0 0 to 500 BAR NEVER LS 1963 Max p Sensor LS Setup::Application::LS Control REAL 0 0 to 500 BAR ALWAYS LS 1968 Pressure Controller Kp REAL 0,001 0 to 100 %/BAR ALWAYS p, p/Q, LS Monitor::Application::p Control Monitor::Application::p/Q Control Monitor::Application::LS Control 1969 Pressure Controller Ki Monitor::Application::p Control REAL 0,001 0 to 100 %/BAR ALWAYS p, p/Q, LS Monitor::Application::p/Q Control Monitor::Application::LS Control 1970 Pressure Controller Kd Monitor::Application::p Control REAL 0 0 to 100 %/BAR ALWAYS p, p/Q, LS Monitor::Application::p/Q Control Monitor::Application::LS Control 1971 Controller Output Monitor::Application::p Control REAL 0 -100 to 100 % NEVER p, p/Q, LS Monitor::Application::p/Q Control Monitor::Application::LS Control 1972 Tracking Error Monitor::Application::p Control REAL 0 0 to 500 BAR NEVER p, p/Q, LS Monitor::Application::p/Q Control Monitor::Application::LS Control 1973 Inner window Ipart Monitor::Application::p Control REAL 0 0 to 500 BAR ALWAYS p, p/Q, LS Monitor::Application::p/Q Control Monitor::Application::LS Control 1974 Outer window Ipart Monitor::Application::p Control REAL 300 0 to 500 BAR ALWAYS p, p/Q, LS Monitor::Application::p/Q Control Monitor::Application::LS Control 1975 Pos. Limit Ki Monitor::Application::p Control REAL 100 0.000 to 10.000 s ALWAYS p, p/Q, LS Monitor::Application::p/Q Control Monitor::Application::LS Control 1976 Neg. Limit Ki Monitor::Application::p Control REAL -100 0 to 100 % ALWAYS p, p/Q, LS Monitor::Application::p/Q Control Monitor::Application::LS Control 1977 Rate Feedback Monitor::Application::p Control REAL 0 -10 to 10 % ALWAYS p, p/Q, LS Monitor::Application::p/Q Control Monitor::Application::LS Control
Handbuch
Drive Controlled Pump
DCP Handbuch innen A4 DE NEU.indd 31.01.17 53
Parker Hannifin Corporation Hydraulics Group
PNO Name Path(s) Type Default Range Units WQ Selected App 1982 Controller yp Monitor::Application::Controller Status REAL 0 -100 to 100 % NEVER p, p/Q, LS 1983 Controller yi Monitor::Application::Controller Status REAL 0 -100 to 100 % NEVER p, p/Q, LS 1984 Controller yd Monitor::Application::Controller Status REAL 0 -100 to 100 % NEVER p, p/Q, LS 1990 Max p pressure Valve Setup::Application::Pressure Valve REAL 0 0 - 500 bar ALWAYS p, p/Q, LS Setup::Application::Pressure Valve Setup::Application::Pressure Valve 1991 Feed Forward pressure Valve Setup::Application::Pressure Valve REAL 20 0 - 100 % ALWAYS p. p/Q, LS Setup::Application::Pressure Valve Setup::Application::Pressure Valve 1992 Faktor PID pressure Valve Monitor::Application::Digital IOs BOOL 0.2 0 - 1 % ALWAYS p. p/Q, LS 1995 Hysteris Bypass Setup::Application::Bypass Valve REAL 0 0 - 1000 RPM ALWAYS ALL Setup::Application::Bypass Valve Setup::Application::Bypass Valve Setup::Application::Bypass Valve Setup::Application::Bypass Valve 1996 Bypass open Monitor::Application::Digital IOs BOOL FALSE NEVER ALL Monitor::Application::Digital IOs Monitor::Application::Digital IOs Monitor::Application::Digital IOs Monitor::Application::Digital IOs 2000 Filter Analog Input01 Setup::Application::Analog Input Q TIME 0 0 to 60 S ALWAYS ALL Setup::Application::Analog Input p Setup::Application::Analog Input pQ Setup::Application::Analog Input LS Setup::Application::Analog Input Accu 2001 Filter Analog Input02 Setup::Application::Analog Input Q TIME 0 0 to 60 S ALWAYS p. p/Q, LS Setup::Application::Analog Input p Setup::Application::Analog Input pQ Setup::Application::Analog Input LS 2002 Filter Analog Input11 Setup::Application::Analog Input pQ TIME 0 0 to 60 S ALWAYS p/Q 2003 Start Monitor::Application::Digital IOs BOOL FALSE NEVER ALL 2004 No Stop Monitor::Application::Digital IOs BOOL FALSE NEVER ALL 2005 Reset Monitor::Application::Digital IOs BOOL FALSE NEVER ALL 2006 Pump 1 or Switch On Monitor::Application::Digital IOs BOOL FALSE NEVER ALL 2007 Pump 2 or switch Off Monitor::Application::Digital IOs BOOL FALSE NEVER ALL 2010 Drive Running Relay01 Monitor::Application::Digital IOs BOOL FALSE NEVER ALL 2011 No Drive Error Relay02 Monitor::Application::Digital IOs BOOL FALSE NEVER ALL 2015 Speed loop Pgain Monitor::Application::Speed Loop Ctrl REAL 20 0 to 100 % ALWAYS p. p/Q, LS 2016 Speed loop I time Monitor::Application::Speed Loop Ctrl TIME 0.1 0 to 10 S ALWAYS p. p/Q, LS 2017 I - Defeat Monitor::Application::Speed Loop Ctrl BOOL FALSE ALWAYS p. p/Q, LS 2018 I – Preset Monitor::Application::Speed Loop Ctrl REAL 0 0 -100 % ALWAYS p. p/Q, LS 2019 Dmd Filter TC Monitor::Application::Speed Loop Ctrl TIME 0 0 - 10 S ALWAYS p. p/Q, LS 2020 Fbk Filter TC Monitor::Application::Speed Loop Ctrl TIME 0 0 - 10 S ALWAYS p. p/Q, LS 2021 Control Word Monitor:Application:Fieldbus WORD 0 ALWAYS ALL 2022 Status Word Monitor:Application:Fieldbus WORD 0 NEVER ALL 2030 DIGIN01 Start Monitor::Application::Testfunction BOOL FALSE ALWAYS ALL 2031 DIGIN02 No Stop Monitor::Application::Testfunction BOOL FALSE ALWAYS ALL 2032 DIGIN03 Reset Monitor::Application::Testfunction BOOL FALSE ALWAYS ALL 2033 DIGIN04 Pump 1 Monitor::Application::Testfunction BOOL FALSE ALWAYS ALL 2034 DIGIN05 Pump 2 Monitor::Application::Testfunction BOOL FALSE ALWAYS ALL 2035 DIGIN04 Switch On Monitor::Application::Testfunction BOOL FALSE ALWAYS ALL 2036 DIGIN05 Switch Off Monitor::Application::Testfunction BOOL FALSE ALWAYS ALL 2040 Testmovement Monitor::Application::Testfunction BOOL FALSE ALWAYS ALL 2041 P1 Testmovement Monitor::Application::Testfunction REAL 0 0 - 400 BAR ALWAYS ALL 2042 P2 Testmovement Monitor::Application::Testfunction REAL 0 0 - 400 BAR ALWAYS ALL 2043 Q1 Testmovement Monitor::Application::Testfunction REAL 0 0 - 1000 LPM ALWAYS ALL 2044 Q2 Testmovement Monitor::Application::Testfunction REAL 0 0 - 1000 LPM ALWAYS ALL
Handbuch
Störungen und Fehlerbehebung
Was passiert bei einer Störung?
Bei einer Störung wird der Leistungsteil des Motors sofort deaktiviert, wodurch der Motor und die Last bis zum Stillstand auslaufen. Die Störung bleibt bestehen, bis ein Reset durchgeführt wird. Dadurch bleibt der Antrieb auch bei vorübergehenden Störfällen deaktiviert, selbst wenn die eigentliche Ursache der Störung nicht mehr vorhanden ist.
Anzeigen am Keypad
Bei einer Störung wird der ausgelöste Alarm am Display des GKP angezeigt.
Rücksetzen einer Störung
Alle Störungen bzw. Alarme müssen zurückgesetzt werden, ehe der Antrieb wieder gestartet werden kann. Eine Störung bzw. ein Alarm kann nur zurückgesetzt werden, wenn die Bedingung nicht mehr aktiv ist. Das bedeutet: Bei Abschaltung auf Grund einer Übertemperatur des Kühlkörpers lässt sich der Reset erst durchführen, wenn die Temperatur unter den Alarmgrenzwert gefallen ist.
Sie können eine Störung wie folgt zurücksetzen:
1. Drücken Sie (STOPP), um einen Reset durchzuführen und den Alarm am Display zu löschen.

2. Im dezentralen Klemmen-Sequenzierungsmodus erzeugen Sie einen Übergang des Bits RESET TRIP (Bit 7) in Parameter „Appl. Steuerwort“ von 0 auf 1.
3. Im dezentralen Kommunikations-Sequenzierungsmodus erzeugen Sie einen Übergang des Bits RESET TRIP (Bit 7) in Parameter „Komm. Steuerwort“ von 0 auf 1.
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 54
Drive Controlled Pump
PNO Name Path(s) Type Default Range Units WQ Selected App 2045 Time Testmovement Monitor::Application::Testfunction TIME 0 0 - 300 S ALWAYS ALL 2050 Component Protection Setup::Application::Component Protection TIME 0 0 - 600 S ALWAYS ALL 2051 Trip Status WARNING DWORD FALSE NEVER ALL 2053 HPU Cont. no warning WARNING BOOL FALSE NEVER ACCU 2054 HPU Cont.no error WARNING BOOL FALSE NEVER ACCU 2055 HPU Oil no warning WARNING BOOL FALSE NEVER ACCU 2056 HPU Oil no error WARNING BOOL FALSE NEVER ACCU 2057 HPU Temp. no warning WARNING BOOL FALSE NEVER ACCU 2058 HPU Temp. no error WARNING BOOL FALSE NEVER ACCU
Handbuch
ID Meldung
1 ÜBERSPANNUNG
2 UNTERSPANNUNG
Drive Controlled Pump
Möglicher Grund für den Alarm
Die interne DC-Zwischenkreisspannung des Antriebs ist zu hoch:
· Die Versorgungsspannung ist zu hoch. Es wurde versucht, eine große Masse zu schnell zu bremsen; Zeit für RAMPE AB ist zu kurz. Unterbrechung im Schaltkreis des Bremswiderstands.
DC LINK-Spannung zu niedrig:
· Versorgungsspannung ist zu niedrig/nicht vorhanden.
Der vom Antrieb abgegebene Motorstrom ist zu hoch:
· Es wurde versucht, eine große Masse zu schnell zu beschleunigen; Zeit für RAMPE AUF ist zu kurz.
3 ÜBERSTROM
· Es wurde versucht, eine große Masse zu schnell zu bremsen; Zeit für RAMPE AB ist zu kurz. Motor wurde stoßbelastet.
· Kurzschluss zwischen Motorphasen. Kurzschluss zwischen Motorphase und Erdleiter.
· Motorausgangskabel zu lang oder zu viele Motoren parallel zum Antrieb geschaltet. Wert für BOOST FEST zu hoch eingestellt.
Selbstschutz des Leistungsteils
4 Leistungsteil FEHLER
5 Leistungsteil ÜBERSTROM
6 STROMBEGRENZUNG
7 MOTOR BLOCKIERT
8 INVERS ZEIT
9 MOTOR I2T
10 ÜBERSTROM niedr. DREHZ
11 KÜHLKÖRPERÜBERTEMP
Das Leistungsteil hat einen momentanen Überstrom erkannt. Siehe ÜBERSTROM in dieser Tabelle.
Momentane Überspannung. Siehe ÜBERSPANNUNG in dieser Tabelle.
Der Motorstrom hat die Kapazitäten des Leistungsteils überschritten. Der Leistungsteil hat einen momentanen Überstrom erkannt. Siehe ÜBERSTROM in dieser Tabelle.
Nur V/Hz-Modus: Übersteigt der Strom für die Dauer von 1 Sekunde 200 % des Nennstroms des Leistungsteils, wird eine Störung ausgelöst. Ursache dafür sind Stoßbelastungen.
Der Motor ist blockiert (keine Drehung). Antrieb > 200 Sekunden im Bereich des Stromgrenzwerts:
· Zu hohe Motorlast.
Wert für BOOST FEST zu hoch eingestellt.
Die Störung wurde durch einen längeren Überlastzustand ausgelöst, dessen Dauer den Wert für INVERS ZEIT überschritten hat:
· Beseitigen Sie die Ursache der Überlast.
Nur für PMAC-Motor: Die Störung wurde durch einen längeren Überlastzustand ausgelöst.. Die Motorlast hat einen Wert von 105 % erreicht.
Der an den Motor abgegebene Strom (> 100 %) ist bei einer Ausgangsfrequenz von Null zu hoch: Wert für BOOST FEST zu hoch eingestellt.
Kühlkörpertemperatur des Antriebs zu hoch. Die Umgebungslufttemperatur ist zu hoch.
· Schlechte Belüftung oder zu geringer Abstand zwischen Antrieben. Prüfen Sie, ob sich der Kühlkörperlüfter dreht.
12 INTERNE OVERTEMP · Prozessortemperatur oder Umgebungstemperatur in der Endstufe zu hoch Die Umgebungstemperatur des Antriebs ist zu hoch.
Motortemperatur zu hoch (E/A-Optionskarte erforderlich). Überlast.
13 MOTORÜBERTEMPERATUR
· Motornennspannung nicht korrekt. Wert für BOOST FEST zu hoch eingestellt.
· Zu langer Betrieb des Motors bei niedriger Drehzahl ohne Fremdkühlung. Trennung der Motorthermistor-Verbindung.
14 EXTERNE STÖRUNG Externer Störungseingang (Anwendung) weist High-Pegel auf: Beschreibung der Anwendung finden, um die Quelle des Signals zu identifizieren
15 BREMSCH. KURZSCHLUSS Externer dynamischer Bremswiderstand überlastet: An dem externen Bremswiderstand liegt ein Kurzschluss vor.
· Verdrahtungsfehler
16 BREMSWIDERSTAND Externer dynamischer Bremswiderstand überlastet:
· Es wurde versucht, eine große Masse zu schnell oder zu oft zu bremsen.
17 BREMSCHOPPER Interner Bremschopper wurde überlastet:
18
· Es wurde versucht, eine große Masse zu schnell oder zu oft zu bremsen.
LOKALE STEUERUNG Keypad wurde während der Betriebsart Lokale Steuerung vom Gerät getrennt:
· Versehentliches Herausziehen des GKP.
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 55
Handbuch
ID Meldung
Drive Controlled Pump
Möglicher Grund für den Alarm
19 KOMM-PAUSE Kommunikationsoption ausgefallen:
· Ausfall der Kommunikationsoption erkannt. Siehe Handbuch der Kommunikationsoption.
20 NETZSCHÜTZ
DC-Zwischenkreis hat nicht innerhalb der Zeit für Motorschütz-Feedback den Grenzwert für Störung wegen Unterspannung erreicht. Keine Verbindung zum Netzschütz.
· Fehlende 3-phasige Netzversorgung.
21 PHASENAUSFALL Noch nicht implementiert (für höhere Baugröße vorbehalten)
22 VDC WELLIGKEIT
Welligkeit der Zwischenkreisspannung zu hoch: Auf fehlende Eingangsphase prüfen.
· Wiederholte Aktion Start/Stopp oder Vorwärts/Rückwärts.
23 BASIS MODBUS AUSFALL Unterbrechung der Modbus Basiskommunikation:
· Unterbrechung der Modbus Basiskommunikation erkannt. Siehe Anhang A „Modbus TCP“.
24 24V ÜBERLAST 24V-Referenzspannung überlastetf
25 PMAC n-FEHLER
· Ausgangsüberlast infolge zu hoher Stromabgabe von der 24V-Klemme.
Nur für PMAC-Motor: Bei Verwendung der Start-Funktion in der Betriebsart PMAC hat die Istdrehzahl nach 5 Sekunden nicht den Drehzahlsollwert für den Wechsel von Open-Loop- auf Closed-Loop-Regelung bzw. umgekehrt erreicht.
26 ÜBERDREHZAHL Überdrehzahl:
27 STO AKTIV
· >150 % Basisdrehzahl in der Betriebsart Sensorlose Vektorregelung
Si,versuchen den Motor mit Safe Torque Off aktiv zu starten Überprüfen Sie die STO Verdrahtung . Es kann notwendig sein, den Antrieb aus und wieder ein zu schalten,
28 FEEDBACK FEHLT Die konfigurierte Encoderrückführung ist nicht vorhanden oder defekt
29 LÜFTER FEHLER
Ein interner Gerätelüfter ist ausgefallen. Die Leistungsfähigkeit des Gerätes ist eingeschränkt, die Lebensdauer der Leistungselektronik wird möglicherweise dadurch reduziert. Ein Austausch des Gerätelüfters ist notwendig. Bitte senden Sie den Leistungsteil zur Instandsetzung an eine qualifizierte Parker Hannifin Reparatur Niederlassung.
30 CURRENT SENSOR Aktuelle Feedback Phase fehlt Prüfen Sie Motorphase connections
31 VERLUSTLEISTUNG STOPP Ein Stromausfall Ride Through-Sequenz aufgetreten ist und entweder 1650 Pwrl Time Limit überschritten ist oder die Motordrehzahl eine Drehzahl Null während der Sequenz erreicht ist.
Hexadezimale Darstellung von Störungen für den Parameter Trip Status (2051) unter Monitor::Quick Monitor
Jede Störung weist eine eindeutige achtstellige Nummer im Hexadezimal-Format auf, wie in der Tabelle unten aufgelistet. Diese Nummer wird auch als „Störungs-
maske“ bezeichnet. Die Störungsmasken werden in den Parametern für „Enable“, „Active“ und „Warnings“ im Störungsmodul verwendet.
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 56
ID Meldung Maske Benutzerseitig deaktivierbar 1 ÜBERSPANNUNG 00000001 2 UNTERSPANNUNG 00000002 3 ÜBERSTROM 00000004 4 Leistungsteil FEHLER 00000008 5 Leistungsteil ÜBERSTROM 00000010 6 STROMBEGRENZUNG 00000020 ü 7 MOTOR BLOCKIERT 00000040 ü 8 INVERS ZEIT 00000080 ü 9 MOTOR I2T 00000100 ü 10 ÜBERSTROM niedr. DREHZ 00000200 ü 11 KÜHLKÖRPERÜBERTEMP 00000400 12 UMGEBUNGSÜBERTEM 00000800 ü 13 MOTORÜBERTEMPERATUR 00001000 ü 14 EXTERNE STÖRUNG 00002000 ü ID Meldung Maske Benutzerseitig deaktivierbar 15 BREMSCH. KURZSCHLUSS 00004000 ü 16 BREMSWIDERSTAND 00008000 ü 17 BREMSCHOPPER 00010000 ü 18 LOKALE STEUERUNG 00020000 ü 19 KOMM-PAUSE 00040000 ü 20 NETZSCHÜTZ 00080000 ü 21 PHASENAUSFALL 00100000 ü 22 VDC WELLIGKEIT 00200000 ü 23 BASIS MODBUS AUSFALL 00400000 ü 24 24V ÜBERLAST 00800000 ü 25 PMAC n-FEHLER 01000000 ü 26 ÜBERDREHZAHL 02000000 ü 27 STO aktiv 04000000
Handbuch
Laufzeit-Warnungen
Eine Laufzeit-Warnung weist auf einen permanenten Hardware-Fehler hin. Die Anzeige einer Laufzeit-Warnung sieht wie folgt aus:
Drive Controlled Pump
CODE ist eine Nummer zwischen 0 und 65000. Die nachstehende Tabelle liefert zusätzliche Informationen zur Unterstützung der Mitarbeiter im technischen Support von Parker Hannifin.
CODE FEHLER Mögliche Fehlerursache
1 bis 255 Ausnahmefehler
12 Speicherzugriff
1001 bis 1003 Prozessorüberlast
1006 Speicherüberlauf
· VCM nicht am Leistungsteil befestigt. Option nicht korrekt an der VCM-Steuerkarte angebracht. Fehlerhafter Erdungspotenzialausgleich. Fehler bei der Firmware-Aktualisierung.
· Versuch dengeschützten Speicherbereich zu beschreiben. Höchstwahrscheinlich wird dies durch einen Konfigurationsfehler verursacht. Drücken Sie mehrmals auf OK, bis der Antrieb neu initialisiert, dann ersetzen Sie die Konfiguration mit PDQ.
· Schaltfrequenz verringern (Parameter::Motoreinstellungen::PWM-Modulation::Taktfrequenz). Fehlermeldung aufzeichnen und mit dem technischen Support Kontakt aufnehmen.
· Komplexität der Anwendung verringern.
· Anzahl der Parameter verringern, auf die über das integrierte Modbus TCP-Protokoll zugegriffen wird.
Anzahl der Parameter verringern, auf die über die Feldbus-Kommunikationsoption zugegriffen wird.
1007 Nicht initialisierter Zeiger Fehlermeldung aufzeichnen und mit dem technischen Support Kontakt aufnehmen.
· Fehlermeldung aufzeichnen und mit dem technischen Support Kontakt aufnehmen. 1101 bis 1111
1200 bis 1299 Fehler der Kommunikationsoption Sicherstellen, dass die Kommunikationsoption korrekt installiert ist. Firmware im AC30V aktualisieren.
1300 Ethernet-Fehler
· Kommunikationsoption austauschen.
· Fehlermeldung aufzeichnen und mit dem technischen Support Kontakt aufnehmen.
1301 Fehler Modbus-Server Fehlermeldung aufzeichnen und mit dem technischen Support Kontakt aufnehmen.
1302 Fehler HTTP-Server Fehlermeldung aufzeichnen und mit dem technischen Support Kontakt aufnehmen.
1303 Fehler DCT-Server Fehlermeldung aufzeichnen und mit dem technischen Support Kontakt aufnehmen.
1401 Test Steuermodul · Fehler beim Selbsttest des Steuermoduls 1402
1403 Test Leistungsteil · VCM nicht am Leistungsteil befestigt.
1404 Fehler beim Selbsttest des Leistungsteils
1501 Identität E/A-Option Sicherstellen, dass die E/A-Option korrekt installiert ist.
1502 Prozessor E/A-Option Firmware im AC30V aktualisieren.
1503 Unbekannte E/A-Option · E/A-Option austauschen.
1502 Prozessor E/A-Option
· Sicherstellen, dass die E/A-Option korrekt installiert ist.
· Firmware im AC30V aktualisieren. E/A-Option austauschen.
1503 Unbekannte E/A-Option Sicherstellen, dass die E/A-Option korrekt installiert ist. Firmware im AC30V aktualisieren.
1504 IO Option watchdog
1601 Interner Fehler des Leistungsteils
· E/A-Option austauschen.
· Die IO Option kommuniziert nicht mehr
· Leistungsteil an das Parker Hannifin Reparaturzentrum einsenden.
DCP Handbuch innen A4 DE NEU.indd 31.01.17 57
Parker Hannifin Corporation Hydraulics Group
RUNTIME ERROR CODE 00000000
1010
Initialisierungsfehler
Handbuch
Fehlerbehebung
Drive Controlled Pump
Problem Mögliche Ursache Abhilfemaßnahme
Antrieb lässt sich nicht einschalten. Sicherung durchgebrannt. Verkabelungsfehler oder falsche Anschlüsse.
Sicherung brennt immer wieder durch. Verkabelungsfehler oder falsche Anschlüsse. Fehler im Antrieb.
Versorgungswerte prüfen, korrekte Sicherung einsetzen. Bestellschlüssel mit Modellnummer abgleichen. Alle Verbindungen auf Korrektheit und festen Sitz prüfen. Kabeldurchgang prüfen.
Auf Probleme prüfen und diese beheben, dann korrekte Sicherung einsetzen. Mit Parker Kontakt aufnehmen.
Gerät schaltet nicht ein Fehlerhafte oder keine Spannungsversorgung. Spannungsversorgungswerte prüfen.
Motor startet nicht Motor blockiert.
Motor startet und bleibt stehen. Motor blockiert. Referenzpotentiometer-Schaltkreis unterbrochen.
Diagnose LEDs
Neben dem SD Karteneinschub befinden sich zwei Diagnose LEDs. Die Health LED (Störungsfrei) befindet sich dabei auf der linken Seite SD Karteeinschubs unterhalb des GKP (Grafischen Bedienfeldes). Die Zustände ent-
Antrieb stoppen und Blockierung beheben. STO-Schaltkreis (Safe Torque Off) aktiv. STO-Verbindungen prüfen. Dann den Antrieb ausschalten und wieder einschalten, um etwaige gehaltene STO-Fehler zu löschen.
Antrieb stoppen und Blockierung beheben. Anschlussklemme prüfen.
nehmen Sie bitte der folgenden Tabelle. Z.B. blinkt beim Schreiben der Firmware die HEALTH LED im Takt von 1s und die RUN LED im Takt von 2s.
GESTOPPT
BETRIEB
STOPP, (NORMAL)
SCHNELLSTOPP
FEHLER
INSTALLATION
KONFIGURATION MMODUS
KONFIGURATION FEHLER
FIRMWARE UPDATE – Idle
FIRMWARE UPDATE – Löschen der Firmware
FIRMWARE UPDATE – Schreiben der Firmware
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 58
HEALTH LED RUN LED
Handbuch
Technische Daten
Umgebungsbedingungen
Betriebstemperatur
Drive Controlled Pump
Die Betriebstemperatur ist definiert als die Lufttemperatur in der unmittelbaren Umgebung des Antriebs, wenn das Gerät und andere angrenzende Ausrüstung unter den ungünstigsten Bedingungen betrieben werden.
NORMALBETRIEB 0 °C bis 40 °C, Leistungsreduzierung bis maximal 50 °C
ÜBERLASTBETRIEB 0 °C bis 45°C, Leistungsreduzierung bis maximal 50 °C Bei Überschreitung der maximalen Nennumgebungstemperatur wird die Ausgangsleistung linear um 2 % pro Grad Celsius Überschreitung gemindert (Derating).
Lagertemperatur -25 °C bis +55 °C
Transporttemperatur -25 °C bis +70 °C
IP20 - übrige Oberflächen (Europa)
UL (c-UL) Open Type (Nordamerika/Kanada)
Gehäuseschutzart
Schaltschrankmontage IP20
UL (c-UL) Open Type (Nordamerika/Kanada)
Durchsteckmontage IP20
UL (c-UL) Open Type (Nordamerika/Kanada)
Einsatzhöhe 1000 m ü. NN Leistungsreduzierung um 1 % pro 100 m bis max. 2000 m Feuchtigkeit Max. 85 % relative Luftfeuchtigkeit bei 40 °C, nicht kondensierend
Atmosphäre Nicht entflammbar, nicht korrosiv und staubfrei
Klimatische Bedingungen Klasse 3k3 nach EN 60721-3-3
Für das Standardgerät (beinhaltet unsere optimale Schutzbeschichtung) bedeutet Konformität mit EN 60721-3-3:
a) Klassen 3C3 und 3C4 für Schwefelwasserstoffgas (H2S) in einer Konzentration von 25 ppm über 1200 Stunden
Chemisch aktive Substanzen
b) Klassen 3C1 (ländliche Gegenden) und 3C2 (Stadt) für alle neun in Tabelle 4 der EN 60271-3-3 genannten Substanzen
Die Klassen 3C1 und 3C2 gelten sowohl für Lagerung als auch für Transport.
Hinweis: Das Gerät wurde erfolgreich einem Dauertest über 1200 Stunden mit einer Schwefelwasserstoff-Umgebung 25 ppm unterzogen und für die gesamte Testdauer als fehlerfrei validiert.
Test nach EN 60068-2-6 (Fc)
10 Hz <= f <= 57 Hz sinusförmig 0,075 mm Amplitude
Vibration
Sicherheit
57 Hz<=f<=150 Hz sinusförmig 1 g
10 Zyklen pro Achse auf jeder von drei zueinander senkrechten Achsen
Überspannungskategorie III (Numerale, die die Bemessungsstoßspannung definiert) Verschmutzungsgrad Verschmutzungsgrad II (nicht leitende Verschmutzung, ausgenommen vorübergehende Kondensation) für die Steuerelektronik Verschmutzungsgrad III (Nennwert für verschmutzte Luft) bei Durchsteckmontage
Überspannungskategorie
Nordamerika/Kanada Entspricht den Anforderungen der UL508C als Open Type Antrieb.
Angaben zur Erdung/Sicherheit
Erdung
Alle Einheiten müssen permanent geerdet werden.
· Verwenden Sie einen Schutzleiter aus Kupfer mit mindestens 10 mm² Querschnitt oder bringen Sie parallel zum Schutzleiter einen zweiten Leiter zu einer separaten Erdungsklemme an.
· Der Leiter selbst muss die geltenden lokalen Anforderungen an einen Schutzleiter erfüllen. Angaben zur Eingangsspannungsversorgung Antriebe ohne Filter eignen sich für massebezogene (TN) und nicht massebezogene (IT) Spannungsversorgungen.
(TN) und (IT) Antriebe mit internem Filter sind nur für massebezogene Stromversorgungen (TN) geeignet. Externe Filter sind für TN und IT-Versorgungen (nicht massebezogen) verfügbar.
Zu erwartender Kurzschlussstrom (PSCC) Siehe entsprechende Tabelle mit elektrischen Nennwerten.
Erdschlussstrom >10 mA (alle Modelle)
Corporation
DCP Handbuch innen A4 DE NEU.indd 31.01.17 59
Parker Hannifin
Hydraulics Group
Handbuch
Interne Kühllüfter
Drive Controlled Pump
x 27 cfm (45 m³/h)
x 33 cfm (56 m³/h)
BAUGRÖSSE F
BAUGRÖSSE G
BAUGRÖSSE H
Baugröße J
Baugröße K
55 – 75kW
Modelle
x 27 cfm (45 m³/h)
x 53 cfm (89 m³/h)
x 27 cfm (45 m³/h)
x 53 cfm (89 m³/h)
x 27 cfm (45 m³/h)
x 80 cfm (133 m³/h)
x 518 cfm (880 m³/h)
Die Kühlung durch Fremdbelüftung des Antriebs erfolgt durch einen oder in bestimmten Fällen durch zwei Lüfter. Spannungsversorgung = 380-480V ±10 %, 50/60 Hz ±5% Motorleistung, Ausgangsstrom und Eingangsstrom dürfen im Dauerbetrieb nicht überschritten werden. Minimale Wartezeit bei zyklischem Ein- Ausschalten= 10 min
Elektrische Nennwerte (400-V-Ausführung), Baugröße D
Bestellschlüssel Motorleistung Ausgangsstrom (A) Eingangsstrom (A) Geschätzter Wirkungsgrad Schaltfrequenz (kHz) nominal / Maximum
Ausgangsstrom Derating %/kHz (über nominale Schaltfrequenz angewandt)
BAUGRÖSSE D: Eingangsströme für kW-Nennwerte gelten für AC-Eingang mit 400 V, 50 Hz. HP-Werte für AC-Eingang mit 460 V, 60 Hz. Maximaler Kurzschlussstrom der Einspeisung: 5 kA. Normalbetrieb (Ausgangsüberlast-Motorleistung 110 % für 60 s)
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 60
Produkt Lüfternennwerte
Alle
1
BAUGRÖSSE D
Modelle
Alle
1
BAUGRÖSSE E
Modelle
Alle
2
Modelle
Alle
2
Modelle
2
45kW
2
Alle
2
3
1
Alle Modelle
DCP33P5 1,1 kW 3,5 4 95% 4 / 16 2,40% 1,5 PS 3 3,5 DCP34P5 1,5 kW 4,5 5,3 96% 4 / 16 3,70% 2 PS 3,4 4,5 DCP35P5 2,2 kW 5,5 7,6 97% 4 / 16 4,50% 3 PS 4,8 6,4 DCP37P5 3 kW 7,5 6,5 97% 4 / 16 4,00% DCP3010 4 kW 10 8 97% 4 / 16 3,90% 5 PS 7,6 6,6 DCP3012 5,5 kW 12 10,6 97% 4 / 16 3,50% 7,5 PS 11 9,4 Überlastbetrieb (Ausgangsüberlast-Motorleistung 150 % für 60 s, 180 % für 0,3 s Kurzfrist-Nennwert) DCP33P5 0,75 kW 2,5 2,9 95% 4 / 16 1,00% 1 PS 2,1 2,4 DCP34P5 1,1 kW 3,5 4 95% 4 / 16 3,10% 1,5 PS 3 3,5 DCP35P5 1,5 kW 4,5 5,3 96% 4 / 16 4,30% 2 PS 3,4 4,5 DCP37P5 2,2 kW 5,5 5,2 97% 4 / 16 3,80% 3 PS 4,8 4,6 DCP3010 3 kW 7,5 6,5 97% 4 / 16 3,80% DCP3012 4 kW 10 8 97% 4 / 16 3,30% 5 PS 7,6 6,6
Handbuch
Drive Controlled Pump
Elektrische Nennwerte (400-V-Ausführung), Baugröße E, F
Spannungsversorgung = 380-480V ±10 %, 50/60 Hz ±5%
Motorleistung, Ausgangsstrom und Eingangsstrom dürfen im Dauerbetrieb nicht überschritten werden. Minimale Wartezeit bei zyklischem Ein- Ausschalten= 10 min
Bestellschlüssel Motorleistung Ausgangsstrom (A) Eingangsstrom (A)
BAUGRÖSSE E: Eingangsströme für kW-Nennwerte gelten für AC-Eingang mit 400 V, 50 Hz und PS-Werte für AC-Eingang mit 460 V, 60 Hz. Zu erwartender Kurzschlussstrom: 5 kA.
für kW-Nennwerte gelten für AC-Eingang mit 400 V, 50 Hz und PS-Werte für AC-Eingang mit 460 V, 60 Hz. Zu erwartender Kurzschlussstrom: 5 kA.
(Ausgangsüberlast-Motorleistung 110 % für 60 s)
Überlastbetrieb (Ausgangsüberlast-Motorleistung 150 % für 60 s, 180 % für 0,3 s Kurzfrist-Nennwert)
Elektrische Nennwerte (400-V-Ausführung), Baugröße G
Spannungsversorgung = 380-480V ±10 %, 50/60 Hz ±5% Motorleistung, Ausgangsstrom und Eingangsstrom dürfen im Dauerbetrieb nicht überschritten werden.
Wartezeit bei zyklischem Ein- Ausschalten= 10 min Bestellschlüssel Motorleistung Ausgangsstrom (A) Eingangsstrom (A) Geschätzter Wirkungsgrad
BAUGRÖSSE G: Eingangsströme für kW-Nennwerte gelten für AC-Eingang mit 400 V, 50 Hz. HP-Werte für AC-Eingang mit 460 V, 60 Hz. Maximaler Kurzschlussstrom der Einspeisung: 5 kA. Normalbetrieb (Ausgangsüberlast-Motorleistung 110 % für 60 s)
DCP Handbuch innen A4 DE NEU.indd 31.01.17 61
Parker Hannifin Corporation Hydraulics Group
Geschätzter Wirkungsgrad Schaltfrequenz (kHz) nominal / Maximum Ausgangsstrom Derating %/kHz
Normalbetrieb
s) DCP3016 7,5 kW 16 14,5 97% 4 / 16 5,50% 10 PS 14 12,1 DCP3023 11 kW 23 20,4 97% 4 / 16 5,10% 15 PS 21 18 Überlastbetrieb
s Kurzfrist-Nennwert) DCP3016 5,5 kW 12 10,7 97% 4 / 16 4,90% 7,5 PS 11 9,5 DCP3023 7,5 kW 16 14,5 97% 4 / 16 4,90% 10 PS 14 12,7 BAUGRÖSSE F: Eingangsströme
Normalbetrieb
DCP3032 15 kW 32 28,5 97% 4 / 12 6,30% 20 PS 27 24,5 DCP3038 18,5 kW 38 33,5 97% 4 / 12 6,70% 25 PS 36 30,2
(Ausgangsüberlast-Motorleistung 110 % für 60
(Ausgangsüberlast-Motorleistung 150 % für 30 s, 180 % für 0,3
DCP3032 11 kW 23 21,7 97% 4 / 12 6,00% 15 PS 21 19,1 DCP3038 15 kW 32 28,5 97% 4 / 12 6,10% 20 PS 27 24,5
Schaltfrequenz
nominal /
Ausgangsstrom Derating %/kHz
Minimale
(kHz)
Maximum
DCP3045 22kW 45 40 98% 3 / 12 5,70% 30Hp 40 35.7 DCP3060 30kW 60 54.7 98% 3 / 12 5,90% 40Hp 52 48 DCP3073 37kW 73 66.2 98% 3 / 12 5,60% 50Hp 65 58.5 Überlastbetrieb
%
DCP3045 18kW 38 34.3 98% 3 / 12 5,30% 25Hp 36 30-May DCP3060 22kW 45 41.8 98% 3 / 12 5,70% 30Hp 40 37.5 DCP3073 30kW 60 54.7 98% 3 / 12 5,20% 40Hp 52 48
(Ausgangsüberlast-Motorleistung 150
für 60 s, 180 % für 0,3 s Kurzfrist-Nennwert)
Handbuch
Drive Controlled Pump
Elektrische Nennwerte (400-V-Ausführung), Baugröße H
Spannungsversorgung = 380-480V ±10 %, 50/60 Hz ±5%
Motorleistung, Ausgangsstrom und Eingangsstrom dürfen im Dauerbetrieb nicht überschritten werden. Minimale Wartezeit bei zyklischem Ein- Ausschalten= 10 min
Bestellschlüssel Motorleistung Ausgangsstrom (A) Eingangsstrom (A) Geschätzter Wirkungsgrad
BAUGRÖSSE H: Eingangsströme für kW-Nennwerte gelten für AC-Eingang mit 400 V, 50 Hz. HP-Werte für AC-Eingang mit 460 V, 60 Hz. Maximaler Kurzschlussstrom der Einspeisung: 5 kA.
Elektrische Nennwerte (400-V-Ausführung), Baugröße J
Spannungsversorgung = 380-480V ±10 %, 50/60 Hz ±5% Motorleistung, Ausgangsstrom und Eingangsstrom dürfen im Dauerbetrieb nicht überschritten werden.
Minimale Wartezeit bei zyklischem Ein- Ausschalten= 10 min
Bestellschlüssel Motorleistung Ausgangsstrom (A) Eingangsstrom (A) Geschätzter Wirkungsgrad Schaltfrequenz (kHz) nominal / Maximum Ausgangsstrom Derating %/kHz
Baugröße J: Eingangsströme für kW-Nennwerte gelten für AC-Eingang mit 400 V, 50 Hz. und für PS-Werte für AC-Eingang mit 460 V, 60 Hz. Zu erwartender Kurzschlussstrom: 10 kA.
Normalbetrieb (Ausgangsüberlast-Motorleistung 110 % für 60 s)
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 62
Schaltfrequenz
nominal / Maximum Ausgangsstrom Derating %/kHz
(kHz)
Normalbetrieb
s) DCP3087 45kW 87 78.8 98% 3 / 08 8.5% 60Hp 77 69 DCP3105 55kW 105 95.8 98% 3 / 08 7.8% 75Hp 96 84.5 DCP3145 75kW 145 130 98% 3 / 08 9.1% 100Hp 124 113.5 Überlastbetrieb (Ausgangsüberlast-Motorleistung
% für
Kurzfrist-Nennwert) DCP3087 37kW 73 66 98% 3 / 08 7.7% 50Hp 65 58.5 DCP3105 45kW 87 79.5 98% 3 / 08 6.9% 60Hp 77 70 DCP3145 55kW 105 97.4 98% 3 / 08 8.6% 75Hp 96 87
(Ausgangsüberlast-Motorleistung 110 % für 60
150
60 s, 180 % für 0,3 s
DCP3180 90kW 180 160 98 % 2,5 / 08 8,1 % 125Hp 156 147 DCP3205 110kW 205 198 98 % 2,5 / 08 8,4 % 150Hp 180 175 DCP3260 132kW 260 236 98 % 2,5 / 08 8,7 % 200Hp 240 231 Überlastbetrieb
150 % für 60 s, 180 %
DCP3180 75kW 145 137 98 % 2,5 / 08 7,5 % 100Hp 124 119 DCP3205 90kW 180 164 98 % 2,5 / 08 8,6 % 125Hp 156 148 DCP3260 110kW 205 199 98 % 2,5 / 08 8,0 % 150Hp 180 177
(Ausgangsüberlast-Motorleistung
für 0,3 s Kurzfrist-Nennwert)
Handbuch
Drive Controlled Pump
Elektrische Nennwerte (400-V-Ausführung), Baugröße K
Spannungsversorgung = 380-480V ±10 %, 50/60 Hz ±5% Motorleistung, Ausgangsstrom und Eingangsstrom dürfen im Dauerbetrieb nicht überschritten werden. Minimale Wartezeit bei zyklischem Ein- Ausschalten= 10 min
Bestellschlüssel Motorleistung Ausgangsstrom (A)
Baugröße K: Eingangsströme für kW-Nennwerte gelten für AC-Eingang mit 400 V, 50 Hz. und für PS-Werte für AC-Eingang mit 460 V, 60 Hz. Zu erwartender Kurzschlussstrom: 18 kA.
DCP Handbuch innen A4 DE NEU.indd 31.01.17 63
Parker Hannifin Corporation Hydraulics Group
Eingangssicherung Eingangssicherung-Nennstrom (A) Europa 400V Ausführung Bestellschlüssel Normalbetrieb Überlastbetrieb Baugröße DCP33P5 6A 6A D DCP34P5 8A 6A D DCP35P5 10A 8A D DCP37P5 10A 8A D DCP3010 12A 10A D DCP3012 16A 10A D DCP3016 20A 16A E DCP3023 25A 20A E DCP3032 32A 25A F DCP3038 40A 32A F DCP3045 63A 50A G DCP3060 80A 70A G DCP3073 100A 90A G DCP3087 125A 125A H DCP3105 150A 150A H DCP3145 200A 200A H DCP3180 250A 250A J DCP3205 315A 315A J DCP3260 400A 400A J DCP3315 400A 400A K DCP3380 500A 500A K DCP3440 630A 630A K
Eingangsstrom (A) Geschätzter Wirkungsgrad Schaltfrequenz (kHz) nominal / Maximum Ausgangsstrom Derating %/kHz
Normalbetrieb
DCP315 160kW 315 276 98 % 2 / 08 8,5 % 250Hp 302 279 DCP380 200kW 380 343 98 % 2 / 08 7,7 % 300Hp 361 333 DCP440 250kW 440 428 98 % 2 / 08 8,3 % 350Hp 414 389 Überlastbetrieb (Ausgangsüberlast-Motorleistung 150 % für 60 s, 180 % für 0,3 s Kurzfrist-Nennwert) DCP315 132kW 260 229 98 % 2 / 08 7,7 % 200Hp 240 225 DCP380 160kW 315 276 98 % 2 / 08 6,9 % 250Hp 302 279 DCP440 200kW 380 344 98 % 2 / 08 7,5 % 300Hp 361 334
(Ausgangsüberlast-Motorleistung 110 % für 60 s)
Handbuch
Interner
Drive Controlled Pump
Interner dynamischer
Interner dynamischer Bremschopper, Baugröße F
s max., 30 % Auslastung
Interner dynamischer Bremschopper, Baugröße G
Parker Hannifin Corporation Hydraulics Group DCP Handbuch innen A4 DE NEU.indd 31.01.17 64
dynamischer Bremschopper, Baugröße D
Interner
Bremschopper Bestellschlüssel Motorleistung (kW/PS) BremschopperSpitzenstrom (A) Spitzenbremsverlustleistung (kW/ PS) BremschopperDauerstrom (A) Dauerbremsverlustleistung (kW/ PS) Minimaler Bremswiderstandswert (W) 20 s max., 30 % Auslastung 400-V-Ausführung: 380-480 V ±10 %, 50/60 Hz +5 % Zwischenkreisspannung: 765 V DCP33P5 1,1 / 1,5 1,5A 1,1 / 1,5 1 0,75 / 1 520 DCP34P5 1,5 / 2 2,2A 1,7 / 2,3 1,4 1,1 / 1,5 355 DCP35P5 2,2 / 3 2,9A 2,3 / 3 2 1,5 / 2 260 DCP37P5 3 / 4 4,3A 3,3 / 4,5 2,9 2,2 / 3 177 DCP3010 4 / 5 5,9A 4,5 / 5,5 3,9 3 / 4 130 DCP3012 5,5 / 7,5 7,8A 6 / 7,5 5,2 4 / 5 98
Bremschopper, Baugröße
Bestellschlüssel Motorleistung (kW/PS) BremschopperSpitzenstrom (A) Spitzenbremsverlustleistung (kW/ PS) BremschopperDauerstrom (A) Dauerbremsverlustleistung (kW/ PS) Minimaler Bremswiderstandswert (W) 20 s max., 30 % Auslastung 400-V-Ausführung: 380-480 V ±10 %, 50/60 Hz +5 % Zwischenkreisspannung: 765 V DCP3016 7,5 / 10 10,8A 8,25 / 11,25 7,2 5,5 / 7,5 71 DCP3023 11 / 15 14,7A 11,25 / 15 9,8 7,5 / 10 52
E
Bestellschlüssel Motorleistung (kW/PS) Bremschopper-
Spitzenbremsver-
Dauerbremsverlustleistung (kW/ PS) Minimaler Bremswider-
(W) 20
400-V-Ausführung: 380-480 V ±10 %, 50/60 Hz +5 % Zwischenkreisspannung: 765 V DCP3032 15 / 20 21,5A 16,5 / 22,5 14,4 11 / 15 35 DCP3038 18 / 25 29,4A 22,5 / 30 19,6 15 / 20 26 Bestellschlüssel Motorleistung (kW/PS) BremschopperSpitzenstrom (A) Spitzenbremsverlustleistung (kW/ PS) BremschopperDauerstrom (A) Dauerbremsverlustleistung (kW/ PS) Minimaler Bremswiderstandswert (W) 20 s max., 30 % Auslastung 400-V-Ausführung: 380-480 V ±10 %, 50/60 Hz +5 % Zwischenkreisspannung: 765 V DCP3045 22 / 30 36A 27 / 37,5 24 18 / 25 21 DCP3060 30 / 40 43A 33 / 45 29 22 / 30 17,7 DCP3073 37 / 50 59A 45 / 60 39 30 / 40 13
dynamischer Bremschopper, Baugröße H
dynamischer Bremschopper, Baugröße J Bestellschlüssel Motorleistung (kW/PS) BremschopperSpitzenstrom (A) Spitzenbremsverlustleistung (kW/ PS) BremschopperDauerstrom (A) Dauerbremsverlustleistung (kW/ PS) Minimaler Bremswiderstandswert (W) 20 s max., 30 % Auslastung DCP3087 45 / 60 73 5,5 / 75 49 37 10,5 DCP3105 55 / 75 88 67,5 / 90 59 45 8,7 DCP3145 75 / 100 108 82,5 / 112,5 72 55 7 Bestellschlüssel Motorleistung (kW/PS) BremschopperSpitzenstrom (A) Spitzenbremsverlustleistung (kW/ PS) BremschopperDauerstrom (A) Dauerbremsverlustleistung (kW/ PS) Minimaler Bremswiderstandswert (W) 20 s max., 30 % Auslastung DCP3180 90 / 125 147 112,5 / 150 98 75 / 100 5,2 DCP3205 110 / 150 176 135 / 187,5 118 90 / 125 4,3 DCP3260 132 / 200 216 165 / 225 144 110 / 150 3,55
Spitzenstrom (A)
lustleistung (kW/ PS) BremschopperDauerstrom (A)
standswert
Interner
Interner
Handbuch
Interner dynamischer Bremschopper, Baugröße K
Drive Controlled Pump
Analoge Ein-/Ausgänge
AIN1 (X11/01), AIN2 (X11/02), AOUT1 (X11/03), AOUT2 (X11/04) gemäß EN 61131-2
des Bereichs durch Parameter 0001 von:
bis 10
-10 V bis +10 V, 0 bis 20 mA, 4 bis 20 mA
durch Parameter 0004 von: 0 bis 10 V, -10 V bis +10 V 0 bis 10 V, 0 bis 20 mA, 4 bis 20 mA
des Bereichs durch Parameter 0002 von:
Absoluter maximaler Eingangsstrom 25 mA im Strommodus (nur AIN1)
Absolute maximale Eingangsspannung ±24 VDC im Spannungsmodus
Impedanz Eingangsimpedanz:
Spannungsbereich = 22 kW
Strombereich = 120 R
Maximaler Nennausgangsstrom 10 mA im Spannungsmodus, mit Kurzschlussschutz
Lastimpedanz:
Spannungsbereich ≥ 1 kΩ
Strombereich ≤ 600 Ω
Auflösung 12 Bits (1 in 4096) über den gesamten Bereich 11 Bits (1 in 2048)
Genauigkeit Besser als ±1 %
Abtast-/Aktualisierungsrate 1 ms
Referenzausgänge
+10VREF (X11/05), -10VREF (X11/06)
Ausgangsspannung +10 V und -10 V
Genauigkeit Besser als ±0,5 %
Ausgangsstrom <10 mA
Überlast-/Kurzschlussschutz Unbestimmt
Digitale Eingänge
DIN1 (X13/02) – DIN3 (X13/04), DIO1 (X12/01) – DIO4 (X12/04)
gemäß EN 61131-2
Nennspannung 24 V
Betriebsbereich
Besser als ±1 %
1 ms
DIN1, DIN2, DIN3, DIO1, DIO2, DIO2, DIO4: 24 V 0-5 VDC = AUS, 15-24 VDC = EIN 15 V (absolute maximale Eingangsspannung ±30 VDC) 5 V 0 V
Eingangsgrenzwert typ. 10 V
Eingangsimpedanz 3,3 kW
Eingangsstrom 7,3 mA ± 10 % bei 24 V
Abtastrate 1 ms
Parker
DCP Handbuch innen A4 DE NEU.indd 31.01.17 65
Hannifin Corporation Hydraulics Group
Bestellschlüssel Motorleistung (kW/PS) Bremschopper-
Spitzenbremsver-
BremschopperDauerstrom (A) Dauerbremsverlustleistung (kW/ PS) Minimaler Bremswiderstandswert (W) 20 s max., 30 % Auslastung DCP3315 160 / 250 173A 132 / 200 173A 132 / 200 4,4 DCP3380 200 / 300 209A 160 / 250 209A 160 / 250 3,6 DCP3440 250 / 350 262A 200 / 300 262A 200 / 300 2,9 Eingänge Ausgänge Bereich AIN1: AOUT1: Wahl
Wahl
Parameter
0
0 bis 10 V,
V AIN2: AOUT2: Wahl
Wahl
Spitzenstrom (A)
lustleistung (kW/ PS)
des Bereichs durch
0003 von:
V,
-10 V bis +10
des Bereichs
ON undefined
OFF
state
Handbuch
Digitale Ausgänge
DIO1 (X12/01) – DIO4 (X12/04) gemäß EN 61131-2
Nennausgangsspannung am offenen Schaltkreis 24 V (Minimum 21 V)
Nennausgangsstrom
Drive Controlled Pump
140 mA: Der maximal verfügbare Gesamtstrom beträgt 140 mA, entweder einzeln oder als Summe der digitalen Ausgänge und der benutzerseitigen +24-V-Versorgung.
Überlast-/Kurzschlussschutz Unbestimmt
Benutzerseitige 24/V-Versorgung (X13/05)
Nennausgangsspannung am offenen Schaltkreis 24 V (Minimum 21 V)
Nennausgangsstrom
140 mA: Der maximal verfügbare Gesamtstrom beträgt 140 mA, entweder einzeln oder als Summe der digitalen Ausgänge und der benutzerseitigen +24-V-Versorgung. Überlast-/Kurzschlussschutz unbestimmt
Relais
RL1 (X14/01) – X14/02), RL2 (X14/03) – X14/04)
Diese Relaiskontakte sind spannungsfrei
Max. Spannung
250 VAC oder 30 VDC
Der Schutz vor induktiven oder kapazitiven Lasten muss durch externe Maßnahmen erfolgen.
Max. Strom 3 A ohmsche Last
Parker
Corporation
DCP Handbuch innen A4 DE NEU.indd 31.01.17 66
Hannifin
Hydraulics Group
Handbuch
Antrieb konfigurieren
Quick Setup
Unter Menü “Einstellungen“ → “Quick Setup“ kann eine Basis Konfiguration durchgeführt werden.
Schritt 1: Select Application
Q_Control
p_Control
LS_Control
Accumulator_Control
pQ_Control
Schritt 2: DCP Pump code
DCP Pumpentyp eingeben (siehe Bestellschlüssel DCP)
DCP3xxxxxxxxxxxL2414
Nach der Eingabe des richtigen DCP Pumpentyp werden alle relevanten Pumpenparameter wie Double pump, Displacement, Pump Speed
Min, Pump Speed Max, Max pressure pump automatisch gesetzt.
Feste Parameter:
Double pump
Displacement Pump
Max pressure pump
Einstellbare Parameter:
Pump Speed Min (Einstellbereich Pump Speed
Min → Pump Speed Max)
Pump Speed Max (Einstellbereich Pump Speed
Max → Pump Speed Min)
Wird als DCP Pumpentyp DCP3xxxxxxxxxxx00000 eingegeben, können alle Pumpenparameter frei und von selbst gesetzt werden. Hierbei entfällt der Schutz der Pumpe, da zulässiger Drehzahl- und Druckbereich verlassen werden kann.
Schritt 3 → 9 Beispiel einer pQ Application
Schritt 3:
Qmax at 100 % AIN02:
Maximaler Volumenstrom bei 100% Eingangssignal an Analogeingang 02.
Qmax= Displacement ccm*100 % Speed rpm 1000
Wird der Q Sollwert über einen Feldbus gesendet, wird dieser Parameter nicht benötigt.
Schritt 5:
Upper Limit pressure:
Begrenzt den Maximaldruck des Antriebs.Ist Maximaldruck > max pressure pump1/2, wird Maximaldruck = max pressure pump1/2.
Schritt 4:
Pmax at 100% AIN02/11
Maximaler Druck bei 100 % Eingangssignal an Analogeingang 02 (Application p/LS Control), oder Analogeingang 11 (Application pQ Control).
Wird der p Sollwert über einen Feldbus gesendet, wird dieser Parameter nicht benötigt.
Schritt 6:
Max p sensor p0:
Mit diesem Parameter wird der Max.-Druck des Drucksensor bei 100 % Eingangssignal in bar festgelegt.
Schritt 7:
Pressure ramp up:
Druckaufbau (Pressure ramp up) in bar/s.
Pressure ramp down:
Druckabbau (Pressure ramp up) in bar/s.
Wird die Druckrampe über einen Feldbus gesendet, wird dieser Parameter nicht benötigt.
Schritt 8:
Max p pressure valve:
Legt den Maximaldruck des Druckbegrenzungsventil, bei 100 % Ansteuersignal am PCD Modul fest.
Parameter wird nur bei angeschlossenem Druckbegrenzungsventil an Analogausgang 02 benötigt.
Schritt 9:
Feed Forward p Valve:
Dieser Wert dient zur proportionalen Vorsteuerung des Druckventils. Bestimmt die Regelreserve des Druckventils. Öffnet das Druckventil bereits, bevor der Antrieb die minimale Drehzahl erreicht hat, muss der Vorsteuerwert erhöht werden. (Standardwert 10 %, sollte beibehalten werden)
Detailliertere Einstellungen können unter Einstellungen → Applikation vorgenommen werden. Bypass Valve (Hysteresis Bypass)
Volumenstromfensterbreite und Zeit, für Volumenstrom erreicht.
Druckfensterbreite und Zeit für Druck erreicht.
Filter Analogeingänge
DCP Handbuch innen A4 DE NEU.indd 31.01.17 67
Drive Controlled Pump Parker Hannifin Corporation Hydraulics Group
Handbuch
Setzen der Motordaten
Wird eine Drive Controlled Pump als komplette Motor- Pumpeneinheit geliefert, sind die entsprechenden Motordaten bereits gesetzt und sollten nicht verändert werden.
Motortyp
Motortyp:
Asynchronmotor (Standard)
PMAC Motor (bei Auswahl eines Synchronmotors muss anschließend ein Autotune durchgeführt werden)
Steuerungsstrategie: U/F Steuerung
Vektorsteuerung (Standard, bei Auswahl Vektorsteuerung muss anschließend ein Autotune durchgeführt werden)
100% Geschwindigkeit in rpm:
Legt die Maximale Geschwindigkeit des Antriebes fest. Die Max.-Geschwindigkeit ist abhängig vom konfiguriertem Pumpentyp. Pump Speed Max kann nicht überschritten werden.
Rampe Auf/Ab:
Ist die Zeit, die der Antrieb von 0 % auf 100 % und 100 % auf 0 % benötigt. Zeit sollte nicht zu kurz gewählt werden, da Zwischenkreis des Umrichters überlastet wird. Fehler wird ausgelöst.
Drive Controlled Pump
Motortypenschild
Motordaten laut Motortypenschild eintragen
Nennfrequenz
Motorstrom
Motorpolzahl
Nennspannung
Nenndrehzahl
Setzen Ein- und Ausgänge
Hier wird festgelegt, ob es sich bei den Ein- bzw. Ausgangssignalen um ein Spannungs- oder Stromsignal handelt. Unter Base IO findet man die Standard Ein- und Ausgänge und unter Option findet man die Erweiterungsausgänge und -eingänge (Zusatzkarte erforderlich und wird nur für pQ Applikation über Analogeingänge benötigt)
Kommunikation
Unter Kommunikation → Option werden die Schnittstelle und die dazugehörigen Einstellungen festgelegt.
Beispiel: Profibus
Komm. Option: PROFIBUS DPV1
Profibus Addresse: 1 (richtet sich nach der Adressvergabe von der SPS)
Komm. Fehler Ein: TRUE
Mapping lesen: (kann bis auf das Controlword frei gesetzt werden)
0: 2021 (Controlword)
1: 1918 (Flow Setpoint Fieldbus)
2: 1931 (Pressure Setpoint Fielbus)
Mapping schreiben: (kann bis auf das Statusword frei gesetzt werden)
0: 2022 (Statusword)
1: 1932 (Actual pressure)
2: 1919 (Actual flow)
3: 0393 (Actual speed)
Parker Hannifin Corporation Hydraulics
DCP Handbuch innen A4 DE NEU.indd 31.01.17 68
Group
Handbuch
Antrieb in Betrieb nehmen
Signalcheck durchführen
Drive Controlled Pump
Control Screen:
Prüfen der Soll- und Istwerte für Druck und Volumenstrom
Inputs and Outputs:
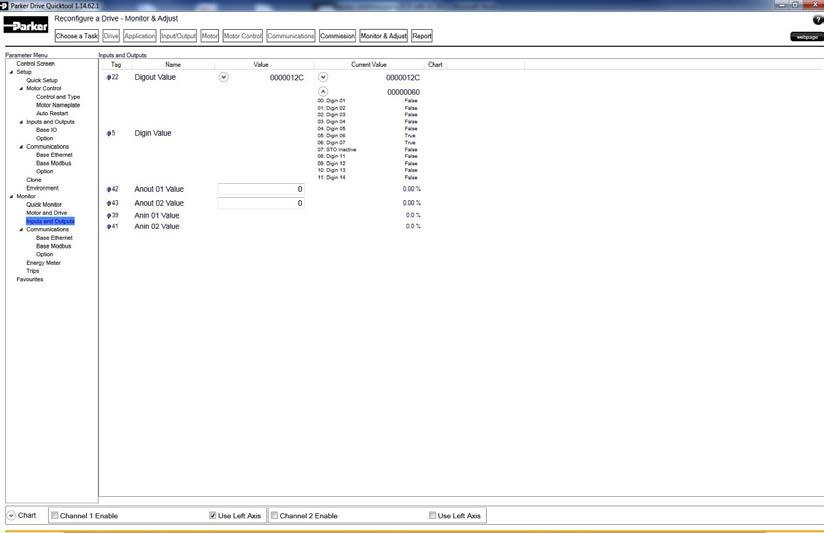
Prüfen der digitalen und analogen Ein-/Ausgänge
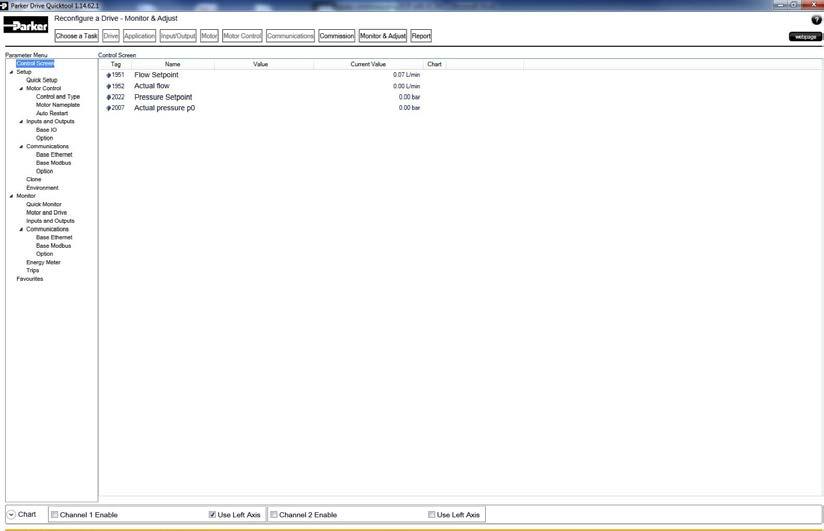
DCP Handbuch innen A4 DE NEU.indd 31.01.17 69
Parker Hannifin Corporation Hydraulics Group
Handbuch
Zum Optimieren des Antriebes bitte den Quick Monitor verwenden
Parameterwerte ändern
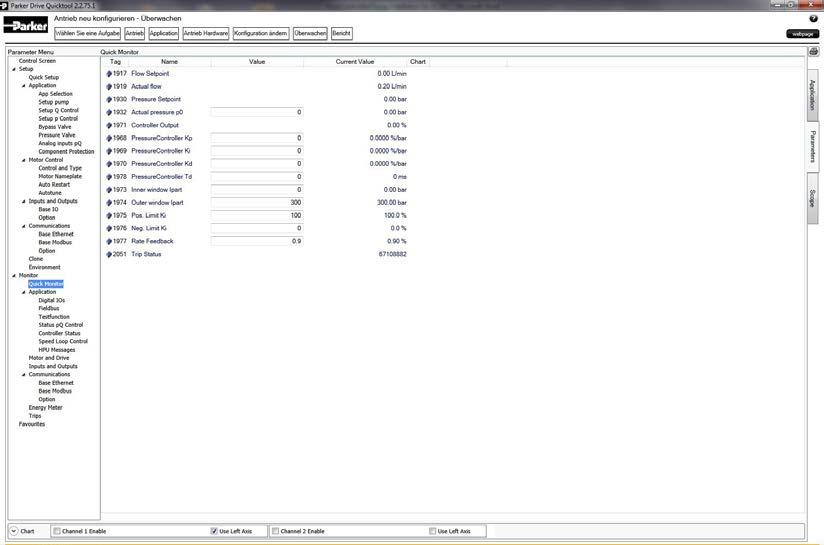
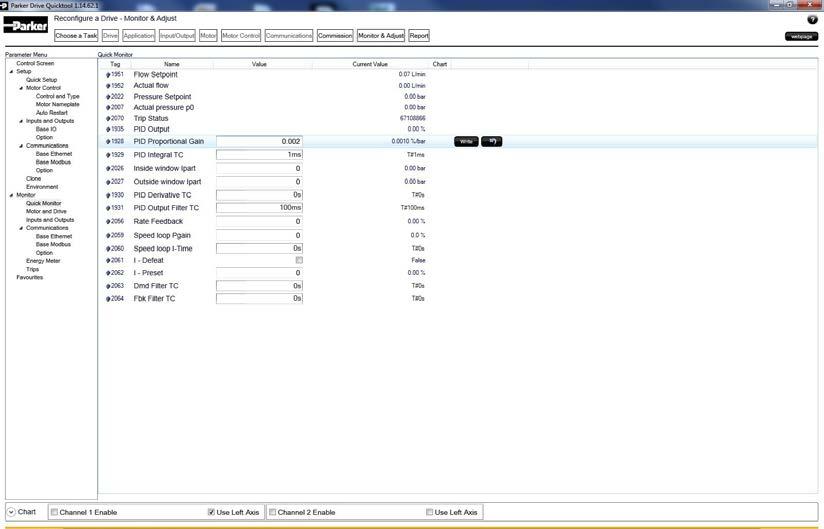
DCP Handbuch innen A4 DE NEU.indd 31.01.17 70
Drive Controlled Pump Parker Hannifin Corporation Hydraulics Group
Parker weltweit
Europa, Naher Osten, Afrika
AE – Vereinigte Arabische Emirate, Dubai
Tel: +971 4 8127100 parker.me@parker.com
AT – Österreich, Wiener Neustadt
Tel: +43 (0)2622 23501-0 parker.austria@parker.com
AT – Osteuropa, Wiener Neustadt
Tel: +43 (0)2622 23501 900 parker.easteurope@parker.com
AZ – Aserbaidschan, Baku
Tel: +994 50 22 33 458 parker.azerbaijan@parker.com
BE/LU – Belgien, Nivelles
Tel: +32 (0)67 280 900 parker.belgium@parker.com
BG – Bulgarien, Sofia
Tel: +359 2 980 1344 parker.bulgaria@parker.com
BY – Weißrussland, Minsk
Tel: +48 (0)22 573 24 00 parker.poland@parker.com
CH – Schweiz, Etoy, Tel: +41 (0)21 821 87 00 parker.switzerland@parker.com
CZ – Tschechische Republik, Klecany
Tel: +420 284 083 111 parker.czechrepublic@parker.com
DE – Deutschland, Kaarst
Tel: +49 (0)2131 4016 0 parker.germany@parker.com
DK – Dänemark, Ballerup
Tel: +45 43 56 04 00 parker.denmark@parker.com
ES – Spanien, Madrid
Tel: +34 902 330 001 parker.spain@parker.com
FI – Finnland, Vantaa
Tel: +358 (0)20 753 2500 parker.finland@parker.com
FR – Frankreich, Contamine s/ Arve
Tel: +33 (0)4 50 25 80 25 parker.france@parker.com
GR – Griechenland, Athen
Tel: +30 210 933 6450 parker.greece@parker.com
HU – Ungarn, Budaoers
Tel: +36 23 885 470 parker.hungary@parker.com
IE – Irland, Dublin
Tel: +353 (0)1 466 6370 parker.ireland@parker.com
IT – Italien, Corsico (MI)
Tel: +39 02 45 19 21 parker.italy@parker.com
KZ – Kasachstan, Almaty
Tel: +7 7273 561 000 parker.easteurope@parker.com
NL – Niederlande, Oldenzaal
Tel: +31 (0)541 585 000 parker.nl@parker.com
NO – Norwegen, Asker
Tel: +47 66 75 34 00 parker.norway@parker.com
PL – Polen, Warschau
Tel: +48 (0)22 573 24 00 parker.poland@parker.com
PT – Portugal
Tel: +351 22 999 7360 parker.portugal@parker.com
RO – Rumänien, Bukarest
Tel: +40 21 252 1382 parker.romania@parker.com
RU – Russland, Moskau
Tel: +7 495 645-2156 parker.russia@parker.com
SE – Schweden, Spånga
Tel: +46 (0)8 59 79 50 00 parker.sweden@parker.com
SK – Slowakei, Banská Bystrica
Tel: +421 484 162 252 parker.slovakia@parker.com
SL – Slowenien, Novo Mesto
Tel: +386 7 337 6650 parker.slovenia@parker.com
TR – Türkei, Istanbul
Tel: +90 216 4997081 parker.turkey@parker.com
UA – Ukraine, Kiew
Tel: +48 (0)22 573 24 00 parker.poland@parker.com
UK – Großbritannien, Warwick
Tel: +44 (0)1926 317 878 parker.uk@parker.com
Europäisches Produktinformationszentrum
Kostenlose Rufnummer: 00 800 27 27 5374 (von AT, BE, CH, CZ, DE, DK, EE, ES, FI, FR, IE, IL, IS, IT, LU, MT, NL, NO, PL, PT, RU, SE, SK, UK, ZA)
Parker Hannifin GmbH
Pat-Parker-Platz 1
41564 Kaarst
Tel.: +49 (0)2131 4016 0
Fax: +49 (0)2131 4016 9199
parker.germany@parker.com
www.parker.com
ZA – Republik Südafrika, Kempton Park
Tel: +27 (0)11 961 0700 parker.southafrica@parker.com
Nordamerika
CA – Kanada, Milton, Ontario
Tel: +1 905 693 3000
US – USA, Cleveland (Industrieanwendungen)
Tel: +1 216 896 3000
US – USA, Elk Grove Village (Mobilanwendungen)
Tel: +1 847 258 6200
Asien-Pazifik
AU – Australien, Castle Hill
Tel: +61 (0)2-9634 7777
CN – China, Schanghai
Tel: +86 21 2899 5000
HK – Hong Kong
Tel: +852 2428 8008
ID – Indonesien, Tangerang
Tel: +62 21 7588 1906
IN – Indien, Mumbai
Tel: +91 22 6513 7081-85
JP – Japan, Fujisawa
Tel: +81 (0)4 6635 3050
KR – Korea, Seoul
Tel: +82 2 559 0400
MY – Malaysia, Shah Alam
Tel: +60 3 7849 0800
NZ – Neuseeland, Mt Wellington
Tel: +64 9 574 1744
SG – Singapur
Tel: +65 6887 6300
TH – Thailand, Bangkok
Tel: +662 186 7000
TW – Taiwan, New Taipei City
Tel: +886 2 2298 8987
VN – Vietnam, Ho-Chi-Minh-Stadt
Tel: +84 8 3999 1600
Südamerika
AR – Argentinien, Buenos Aires
Tel: +54 3327 44 4129
BR – Brasilien, Cachoeirinha RS
Tel: +55 51 3470 9144
CL – Chile, Santiago
Tel: +56 2 623 1216
MX – Mexiko, Toluca
Tel: +52 72 2275 4200
Ihr Parker-Handelspartner
Katalog HY11-5715/DE, 01/2017
© 2017 Parker Hannifin Corporation. Alle Rechte vorbehalten.
