Cinesiologia Essencial
Um Guia Descomplicado para Fisioterapeutas e Educadores Físicos
Thiago Domingues Stocco

Um Guia Descomplicado para Fisioterapeutas e Educadores Físicos
Um Guia Descomplicado para Fisioterapeutas e Educadores
Professor Titular do Programa de Pós- Graduação, Mestrado em Bioengenharia da Universidade Brasil (UB)
Pesquisador Líder do BioRegenera.Lab– Grupo de Pesquisa em Bioengenharia aplicada à Reabilitação e Medicina Regenerativa
Professor Colaborador do Programa de Pós-Graduação, Mestrado/Doutorado em Clínica Médica da Universidade Estadual de Campinas (Unicamp)
Professor do Curso de Fisioterapia da Universidade Santo Amaro (Unisa)
Pós-Doutorado no Laboratório Interdisciplinar de Materiais Avançados da Universidade Federal do Piauí (UFPI)
Doutor em Clínica Médica pela Faculdade de Ciências Médicas da Universidade Estadual de Campinas (Unicamp) e pela
Harvard Medical School, EUA
Mestre em Engenharia Biomédica pelo Laboratório de Nanotecnologia
Biomédica da Universidade do Vale do Paraíba (Univap)
Especialista em Fisiologia do Exercício e Reabilitação Aplicada ao Espor te pela Universidade Federal de São Paulo (Unifesp)
Thieme
Rio de Janeiro• St ut tgar t• New York•Delhi
Dados Internacionais de Catalogação na Publicação (CIP) (eDOC BRASIL, Belo Horizonte/ MG)
S864c
Stocco, Thiago Domingues.
Cinesiologia Essencial: Um Guia Descomplicado para Fisioterapeutas e Educadores Físicos/Thiago Domingues Stocco. – Rio de Janeiro, RJ: Thieme Revinter, 2026.
18,5 x 27 cm
Inclui bibliografia.
ISBN978-65-5572-366-3 eISBN978-65-5572-367-0
1. Fisioterapia. 2. Ciências Básicas. 3. Ortopedia. I. Título.
CDD 612.76
Elaborado por Maurício Amormino Júnior – CRB6/2422
Contato com o autor: tdstocco@live.com
© 2026 Thieme. All rights reserved.
Thieme Revinter Publicações Ltda. Rua do Matoso, 170 Rio de Janeiro, RJ CEP 20270-135, Brasil http://www.thieme.com.br
Thieme USA http://www.thieme.com
Design de Capa: © Thieme Créditos Imagem da Capa: capa feita usando a imagem a seguir: Músculos humano © kjpargeter/freepik.com
Impresso no Brasil por Forma Certa Gráfica Digital Ltda.
5 4 3 2 1
ISBN 978-65-5572-366-3
Também disponível como eBook: eISBN 978-65-5572-367-0
Nota: O conhecimento médico está em constante evolução. À medida que a pesquisa e a experiência clínica ampliam o nosso saber, pode ser necessário alterar os métodos de tratamento e medicação. Os autores e editores deste material consultaram fontes tidas como confiáveis, a fim de fornecer informações completas e de acordo com os padrões aceitos no momento da publicação. No entanto, em vista da possibilidade de erro humano por parte dos autores, dos editores ou da casa editorial que traz à luz este trabalho, ou ainda de alterações no conhecimento médico, nem os autores, nem os editores, nem a casa editorial, nem qualquer outra parte que se tenha envolvido na elaboração deste material garantem que as informações aqui contidas sejam totalmente precisas ou completas; tampouco se responsabilizam por quaisquer erros ou omissões ou pelos resultados obtidos em consequência do uso de tais informações. É aconselhável que os leitores confirmem em outras fontes as informações aqui contidas. Sugere-se, por exemplo, que verifiquem a bula de cada medicamento que pretendam administrar, a fim de certificar-se de que as informações contidas nesta publicação são precisas e de que não houve mudanças na dose recomendada ou nas contraindicações. Esta recomendação é especialmente importante no caso de medicamentos novos ou pouco utilizados. Alguns dos nomes de produtos, patentes e design a que nos referimos neste livro são, na verdade, marcas registradas ou nomes protegidos pela legislação referente à propriedade intelectual, ainda que nem sempre o texto faça menção específica a esse fato. Portanto, a ocorrência de um nome sem a designação de sua propriedade não deve ser interpretada como uma indicação, por parte da editora, de que ele se encontra em domínio público.
Todos os direitos reservados. Nenhuma parte desta publicação poderá ser reproduzida ou transmitida por nenhum meio, impresso, eletrônico ou mecânico, incluindo fotocópia, gravação ou qualquer outro tipo de sistema de armazenamento e transmissão de informação, sem prévia autorização por escrito.
Cinesiologia Essencial nasce com um propósito claro: ser o guia prático, direto e cientificamente confiável que estudantes e profissionais de Fisioterapia, Educação Física e áreas afins realmente precisam para compreender o movimento humano. Em sala de aula, percebemos que o desafio não está apenas na complexidade do tema, mas também na forma como ele é tradicionalmente apresentado, por meio de obras densas, muitas vezes traduções que não dialogam com a realidade brasileira e que, em vez de facilitar, acabam afastando o aluno do aprendizado.
Este livro surge, portanto, de quase uma década de experiência docente, unindo teoria sólida a uma linguagem acessível. Nossa proposta é clara: oferecer um conteúdo que vá direto ao ponto, sem abrir mão da profundidade científica, com uma organização progressiva e lógica que acompanha o caminho natural de quem está começando a estudar cinesiologia e biomecânica do aparelho locomotor.
Cada capítulo é estruturado por articulações, o que permite uma construção gradual do conhecimento. As tabelas detalhadas, com ações musculares e amplitudes de movimento, funcionam como resu-
mos visuais para consulta rápida e revisão eficiente. Mais do que um livro de leitura linear, Cinesiologia Essencial foi pensado também como um material de apoio contínuo, pronto para ser acessado sempre que necessário, durante uma aula, um estágio ou no início da prática profissional.
Ao adotar uma linguagem clara e objetiva, buscamos criar uma obra que não exige do leitor conhecimentos prévios em biomecânica ou fisiologia do exercício. Isso possibilita que o foco das disciplinas esteja nos pontos mais relevantes, descomplicando o conteúdo e tornando o processo de ensino-aprendizagem mais dinâmico.
Seja na graduação, na pós-graduação ou na prática clínica, este livro quer estar ao seu lado como ferramenta de apoio essencial, refletindo a realidade do ensino brasileiro e contribuindo para uma formação mais sólida, moderna e conectada com as demandas da reabilitação e do movimento humano. Temos certeza de que Cinesiologia Essencial será mais do que um livro: será seu parceiro ao longo de toda a trajetória acadêmica e profissional.
Thiago Domingues Stocco
Um Guia Descomplicado para Fisioterapeutas e Educadores Físicos
A cinesiologia, termo derivado do grego kinesis (movimento) e logos (estudo), é o campo da ciência que se dedica ao estudo do movimento humano. Trata-se de uma disciplina que investiga, de maneira sistemática, como e por que o corpo humano se movimenta, integrando conhecimentos de anatomia, fisiologia, biomecânica e outras áreas correlatas.
O movimento é uma necessidade biológica intrínseca aos seres vivos. Com o advento da modernidade e o consequente aumento do sedentarismo, observou-se um crescimento preocupante de doenças associadas à inatividade física. Nesse contexto, as populações são confrontadas com duas opções: adotar hábitos que promovam a saúde física por meio do movimento ou enfrentar a escalada de enfermidades relacionadas com a ausência de atividade física. Isso justifica o crescente interesse científico multidisciplinar em compreender, preservar e otimizar o movimento humano.
A realização do movimento humano envolve uma interação mecânica altamente coordenada entre ossos, músculos, ligamentos e articulações do sistema musculoesquelético. Os músculos produzem forças de tração, aplicando movimentos articulares por meio de braços de alavanca para garantir tanto estabilidade quanto controle dinâmico preciso dos segmentos corporais.
Embora o corpo humano constitua um sistema biológico notoriamente complexo, ele está sujeito às mesmas leis fundamentais da física. Ainda que o reconhecimento da biomecânica como disciplina formal tenha ocorrido apenas no século XX, os princípios mecânicos aplicados aos sistemas biológicos já eram objeto de interesse de grandes estudiosos da Antiguidade e do Renascimento, como Aristóteles, Leonardo da Vinci, Galileo Galilei, Kepler, Descartes e Newton. Os avanços promovidos por esses cientistas permitiram o desenvolvimento da biomecânica como campo científico moderno.
A aplicação dos princípios biomecânicos ao sistema locomotor tornou possível a compreensão de-
talhada da função articular e suas disfunções, sendo hoje um conhecimento fundamental para profissionais como fisioterapeutas, educadores físicos, terapeutas ocupacionais e médicos. A biomecânica, em conjunto com a cinesiologia, integra conceitos da física com os conhecimentos biológicos para explicar e analisar a mecânica do corpo humano em movimento.
O objetivo deste capítulo introdutório é, portanto, apresentar os fundamentos biomecânicos e cinesiológicos que embasam o movimento humano. Ao final da leitura, você deverá ser capaz de compreender e interpretar os principais conceitos de cinemática e cinética, aplicando-os aos movimentos articulares do corpo humano.
A cinemática é o ramo da mecânica que se ocupa da descrição dos movimentos dos corpos no espaço, sem considerar as forças que os provocam. Para entender o movimento humano, é fundamental compreender que ele ocorre quando há deslocamento, isto é, quando a posição de um corpo ou segmento corporal muda ao longo do tempo em relação a um ponto de referência fixo. Em outras palavras, o movimento ocorre quando o corpo (ou uma parte dele) está se deslocando em relação a um ponto de referência.
Dois parâmetros essenciais na descrição do movimento que estão diretamente ligados à cinemática são a velocidade e a aceleração. A velocidade expressa a distância percorrida por um corpo em determinado intervalo de tempo (no caso do movimento humano, a distância percorrida pelo corpo todo ou segmento corporal), enquanto a aceleração representa a variação da velocidade ao longo do tempo.
Os movimentos corporais podem ser analisados como combinações de dois tipos básicos de deslocamento: translação e rotação. O Quadro 1-1 apresenta as principais características de cada um desses movimentos.
Quadro 1-1. Tipos de movimentos
Tipo de movimentoDefinição Imagem ilustrativa
Translação
Deslocamento linear
Rotação
Deslocamento angular
Ocorre quando todos os pontos de um corpo se movem paralelamente uns aos outros, seguindo trajetórias retilíneas e percorrendo distâncias iguais, como se fossem arrastados uniformemente no espaço
Ocorre quando um corpo gira ao redor de um eixo fixo ou móvel, traçando uma trajetória circular
Aqui, cabe um destaque importante: o movimento de translação puro raramente ocorre nas articulações humanas. Em vez disso, os movimentos articulares podem ser descritos mais adequadamente pelos movimentos de rotação ou deslocamento angular, nos quais os ossos giram em torno de um ponto central localizado próximo ou dentro da articulação. Um exemplo clássico é a flexão do cotovelo: ao aproximar a mão do ombro, o antebraço realiza uma rotação em torno do eixo da articulação do cotovelo.
Ainda que a translação pura seja rara no sistema musculoesquelético, excetuando-se, por exemplo, movimentos passivos, os deslocamentos articulares funcionais são, na maioria das vezes, combinações complexas de rotação e translação, com eixos que se deslocam dinamicamente durante o movimento.
Embora cada articulação tenha um repertório específico de movimentos, os principais padrões de movimento articular podem ser descritos de forma geral. O Quadro 1-2 apresenta as definições cinesiológicas básicas dos movimentos articulares mais comuns.
Alguns movimentos possuem nomenclatura específica em determinadas articulações, como flexão plantar do tornozelo ou retração na escápula. Esses casos serão discutidos de forma aprofundada nos capítulos específicos dedicados a cada região anatômica.
Ainda, os movimentos também podem ser classificados de acordo com a quantidade de articulações envolvidas (Quadro 1-3).
Quadro 1-2. Principais padrões de movimentos dos segmentos corporais
MovimentoCaracterística
Flexão Diminuição do ângulo entre dois segmentos corporais
(Movimento contrário ao movimento de extensão)
Exemplo

(Continua.)
Quadro 1-2. (Cont.) Principais padrões de movimentos dos segmentos corporais
MovimentoCaracterística
Extensão Aumento do ângulo entre dois segmentos corporais (Movimento contrário ao movimento de flexão)
Exemplo
Abdução Afastamento de um segmento em relação à linha média do corpo (Movimento contrário ao movimento de adução)
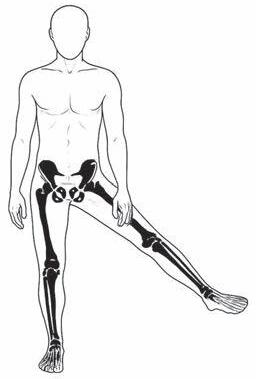
Adução Aproximação de um segmento em direção à linha média do corpo (Movimento contrário ao movimento de abdução)
(Continua.)
Quadro 1-2. (Cont.) Principais padrões de movimentos dos segmentos corporais
MovimentoCaracterística
Rotação interna (rotação medial)
Exemplo
Movimento de rotação no qual a face anterior de um segmento corporal gira em direção à linha média (Movimento contrário ao movimento de rotação externa)
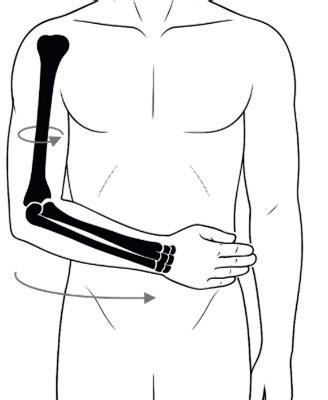
Rotação externa (rotação lateral)
Movimento de rotação no qual a face anterior de um segmento corporal gira para longe da linha média (Movimento contrário ao movimento de rotação interna)
Quadro 1-3. Classificação de movimentos de acordo com a quantidade de articulações envolvidas
ClassificaçãoArticulações envolvidasExemplo
Movimentos uniarticulares
Movimentos biarticulares
Movimentos multiarticulares
1
2
Mais de 2
Flexão de cotovelo durante um exercício para aumento de força do músculo bíceps braquial
Ao subir um degrau, onde há flexão do quadril e do joelho ao mesmo tempo, movimentando as duas articulações
Durante o agachamento, em que há interação entre quadril, joelho e tornozelo
Cadeia Cinemática Aberta e Cadeia
Cinemática Fechada
Outra forma importante de classificar os movimentos é conforme o comportamento da extremidade distal do membro (mãos ou pés). Se essa extremidade estiver fixa (ou apoiada) sobre uma superfície durante a execução do movimento, o padrão é denominado cadeia cinemática fechada. Por exemplo, durante um agachamento, os pés permanecem fixos ao solo enquanto os segmentos superiores se movimentam (Fig. 1-1).
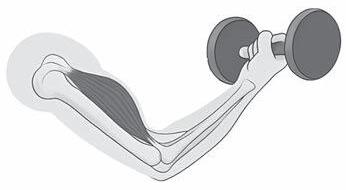
Por outro lado, quando a extremidade distal está livre para se mover no espaço, temos um movimento em cadeia cinemática aberta. Como exemplo, nós podemos citar os exercícios de membros superiores segurando halteres (Fig. 1-2).
A principal diferença entre essas duas formas está, portanto, na liberdade de movimento da ex-
tremidade distal e na forma de ativação muscular exigida. Ambos os padrões têm importância funcional, pois a maioria das atividades diárias e exercícios terapêuticos combinam componentes das duas cadeias.
É válido mencionar que, em algumas literaturas, os termos cadeia cinética aberta e cadeia cinética fechada são mais comumente utilizados como sinônimos para os conceitos descritos acima. A escolha do termo cadeia cinemática neste livro deve-se ao fato de estarmos focados na descrição do movimento em si, ou seja, como os diferentes segmentos do corpo se movem, suas direções e a geometria dessas interações. O mais importante, no entanto, é compreender a distinção funcional baseada na condição da extremidade distal (fixa ou livre) e como isso influencia o padrão de movimento.
Para descrever com precisão os movimentos do corpo humano, é essencial estabelecer um sistema de referência tridimensional. Assim como um GPS utiliza coordenadas espaciais para localizar um ponto, a biomecânica utiliza planos e eixos para identificar a direção e o sentido dos movimentos articulares. Esses elementos funcionam como um mapa corporal que orienta a análise dos deslocamentos dos segmentos do corpo.
O corpo humano pode ser dividido por três planos anatômicos principais, chamados de planos cardinais, todos perpendiculares entre si (Quadro 1-4).
Perpendiculares a esses planos estão os eixos de movimento, que representam as linhas ao redor das quais as rotações ocorrem (Quadro 1-5).
A Figura 1-3 ilustra os planos e eixos do corpo humano.
Uma analogia simples pode facilitar esse entendimento: imagine uma porta girando sobre suas dobradiças. O plano em que ela se move é determinado pelo ângulo de abertura, enquanto o eixo seria a linha imaginária em torno da qual a porta gira, a própria dobradiça. Da mesma forma, os segmentos corporais giram em torno de eixos e dentro de planos específicos.
O Quadro 1-6 resume os movimentos articulares mais comuns, os planos em que ocorrem e os respectivos eixos associados.
Quadro 1-4. Planos do corpo humano
Plano Definição
Plano sagitalDivide o corpo em lados direito e esquerdo
É o plano no qual ocorrem movimentos como flexão e extensão
Plano frontal (ou coronal)
Plano transversal (ou horizontal)
Separa o corpo em partes anterior (frontal) e posterior (dorsal) Movimentos como abdução e adução ocorrem nesse plano
Corta o corpo em metades superior e inferior É o plano das rotações, como a rotação do tronco ou da cabeça
Quadro 1-5. Eixos do corpo humano
Eixo Definição
Eixo laterolateral (ou transversal)
Eixo anteroposterior (ou sagital)
Eixo longitudinal (ou vertical)
Atravessa o corpo de um lado ao outro e está relacionado com os movimentos no plano sagital
Cruza o corpo da frente para trás e se associa aos movimentos no plano frontal
Atravessa o corpo de cima para baixo e está vinculado aos movimentos no plano transversal
Quadro 1-6. Movimentos mais comuns com seus planos e eixos
Movimento
Plano Eixo
Flexão/extensão SagitalLaterolateral
Abdução/aduçãoFrontal Anteroposterior
Rotações (medial/lateral) TransversalLongitudinal
É importante destacar que, embora existam variações entre autores, a maioria das referências utiliza como base a posição anatômica de referência para descrever os movimentos. Nessa posição, o indivíduo está de pé, com os pés levemente afastados, braços estendidos ao lado do corpo e palmas das mãos voltadas para a frente. Essa padronização é essencial para garantir consistência na análise e na descrição dos movimentos.
Introdução à Artrocinemática
Enquanto a cinemática estuda o movimento dos segmentos corporais como um todo, a artrocinemática foca nos movimentos que ocorrem entre as superfícies articulares durante esse processo. Esses micromovimentos articulares são fundamentais para que os movimentos osteocinêmicos, como flexão, extensão, rotação e outros, ocorram de forma fluida e eficiente.
Na prática clínica e nos estudos de biomecânica, compreender a artrocinemática é essencial para interpretar o funcionamento normal e patológico das articulações. Os movimentos artrocinemáticos dependem diretamente da anatomia das superfícies articulares e, em geral, são classificados em três tipos principais: rolamento, deslizamento e rotação, conforme Quadro 1-7.
Esses três movimentos raramente ocorrem de forma isolada nas articulações humanas. Em geral, eles se combinam de forma coordenada, adaptando-se à morfologia das superfícies envolvidas, ao controle neuromuscular e à resistência imposta pelo tecido conjuntivo ao redor da articulação. Por exemplo, durante a flexão do joelho, há uma combinação complexa de rolamento posterior e deslizamento anterior da tíbia sobre o fêmur.
Cabe ressaltar que, embora o estudo da artrocinemática envolva movimentos sutis e muitas vezes invisíveis a olho nu, esses deslocamentos são indispensáveis para o bom funcionamento do sistema musculoesquelético. Sem essa congruência articular e sem o deslizamento apropriado, por exemplo, o movimento de rotação poderia gerar compressões anômalas, restrição de amplitude e, em longo prazo, desgaste articular.
Por fim, é importante destacar que analisar os movimentos artrocinemáticos articulação por articulação requer conhecimento técnico detalhado da anatomia e da morfologia articular de cada segmento do corpo. Essa complexidade está além do escopo deste capítulo introdutório, que visa oferecer uma visão geral dos princípios fundamentais da cinesiologia.
O conceito de graus de liberdade refere-se à quantidade de movimentos independentes que uma articulação pode realizar. Trata-se de uma medida que descreve quantos planos de movimento uma articulação é capaz de realizar de forma isolada. Cada plano de movimento está diretamente relacionado com um eixo específico, como vimos anteriormente, e, por isso, o grau de liberdade está diretamente vinculado à anatomia estrutural da articulação.
Para facilitar o entendimento, imagine que o corpo humano fosse um robô articulado. Cada articulação representaria uma junta com diferentes capacidades de se mover. Algumas juntas poderiam apenas dobrar e estender (movimento uniaxial), outras se moveriam também para os lados (biaxial), enquanto algumas permitiriam ainda rotações adi-
Quadro 1-7. Movimentos entre as faces articulares
MovimentoCaracterística
Rolamento (ou rolamento articular)
Ocorre quando múltiplos pontos de uma superfície articular entram em contato sequencial com múltiplos pontos de outra superfície
DeslizamentoOcorre quando um único ponto de uma superfície articular entra em contato com diferentes pontos da superfície oposta
Analogia
Pneu de carro rolando sobre o asfalto: à medida que o pneu gira, diferentes partes da sua superfície tocam diferentes partes da estrada
Rotação articularSe refere ao movimento em que um ponto de uma superfície articular gira sobre um único ponto da superfície oposta
Pneu do carro está freado, mas deslizando no asfalto sem girar (derrapando)
Imagem ilustrativa
Rolamento


Deslizamento




cionais (triaxial). Esse número de possibilidades de movimento em diferentes direções é o que chamamos de grau de liberdade. O Quadro 1-8 resume essas classificações.
É importante destacar que, na prática clínica, o grau de liberdade de uma articulação pode ser afetado por diversos fatores como lesões, retrações musculares, alterações posturais ou patologias articulares. Portanto, embora a estrutura anatômica determine o grau de liberdade potencial de uma articulação, seu comportamento funcional pode variar de acordo com as condições biomecânicas do indivíduo.
Até este momento, discutimos o movimento humano sob o ponto de vista da cinemática, ou seja, sem considerar as causas que o originam. A partir desta seção, introduziremos a cinética, ramo da mecânica responsável por estudar o movimento a partir das forças que o produzem, o que é essencial para compreender como o corpo humano se move. Embora a aplicação aprofundada da cinética envolva cálculos matemáticos mais complexos, o objetivo aqui é introduzir os conceitos fundamentais, de forma acessível, com ênfase na compreensão prática e funcional.
Quadro 1-8. Classificação das articulações com base nos graus de liberdade
Grau de liberdade Nome técnico
Exemplo anatômico
1 UniaxialArticulações que realizam apenas flexão/extensão:
Ex.: articulação dos dedos da mão (interfalangeanas)
2 Biaxial Articulações que realizam flexão/extensão e abdução/ adução:
Ex.: articulação do punho
3 Triaxial Articulações que realizam flexão/extensão, abdução/ adução e rotação:
Ex.: articulação do ombro
Imagine empurrar uma porta. A porta só se move se você aplicar uma força suficiente para vencer a resistência da dobradiça e o atrito. Da mesma forma, o corpo humano só se movimenta quando uma força é aplicada, seja ela interna (como a contração muscular) ou externa (como o impacto de uma bola). A cinética busca entender essas forças e seus efeitos no corpo em repouso ou em movimento.
A força é uma interação física capaz de modificar o estado de repouso ou de movimento de um corpo, ou mesmo deformá-lo. Em termos biomecânicos, ela representa o esforço necessário para mover os segmentos corporais ou manter posturas. Um músculo que se contrai para levantar um braço está exercendo uma força que atua sobre os ossos e articulações daquele segmento.
Para entender como a força atua no corpo humano, precisamos considerar quatro elementos fundamentais:
1. Sentido da força: indica se a força aplicada tende a empurrar ou puxar o corpo. No corpo humano, os músculos esqueléticos sempre atuam puxando os ossos aos quais estão fixados, ou seja, eles tracionam – nunca empurram.
2. Direção da força: refere-se à linha de ação da força. Por exemplo, a contração do bíceps braquial gera uma força cuja direção está alinhada com a orientação das fibras musculares, indo do ombro ao antebraço. É essa direção que define o movimento resultante.
3. Intensidade da força: diz respeito à magnitude da força gerada. Quanto maior a intensidade da contração muscular, maior será a força aplicada sobre o osso. A intensidade da força é medida em unidades do sistema internacional, como Newtons (N), embora em ambientes clínicos e
de treinamento seja comum também o uso de quilograma-força (kgf). Por exemplo, um indivíduo pode gerar 50 N de força ao contrair o quadríceps para realizar a extensão do joelho contra uma resistência.
4. Ponto de aplicação da força: define o local exato onde a força é aplicada. No corpo humano, isso corresponde às inserções musculares nos ossos. O local onde o músculo se insere influencia diretamente no tipo e na eficácia do movimento gerado.
Um bom exemplo para visualizar esses elementos em ação é, novamente, a flexão do cotovelo: o bíceps braquial traciona o antebraço, puxando-o em direção ao ombro. O sentido é de tração; a direção é longitudinal, seguindo o eixo do braço (cotovelo); a intensidade depende da força da contração muscular; e o ponto de aplicação é a inserção do tendão do bíceps no rádio.
Esse entendimento é fundamental não apenas para descrever os movimentos, mas também para aplicar os princípios biomecânicos à avaliação funcional, ao treinamento físico e à reabilitação de disfunções musculoesqueléticas.
No estudo do movimento humano, é essencial compreender que todo o corpo está constantemente sob a influência da gravidade. Essa força, presente em todos os corpos com massa, não apenas afeta objetos inanimados, mas também desempenha um papel central em nossa locomoção, postura e equilíbrio. Assim, compreender como a gravidade atua sobre o corpo humano é fundamental para entender a biomecânica do movimento.
A gravidade, também conhecida como força gravitacional, é uma das quatro forças fundamentais da natureza e resulta da atração mútua entre corpos com massa. Embora qualquer corpo com massa exerça atração sobre outro, na prática, somente a força gravitacional exercida pela Terra sobre os corpos que estão em sua superfície tem impacto mensurável em nosso dia a dia.
No contexto do corpo humano, a gravidade atua puxando constantemente todos os segmentos corporais em direção ao centro da Terra. Essa força é sempre orientada verticalmente para baixo, com direção que aponta em linha reta para o centro do planeta. O ponto onde essa força é considerada aplicada no corpo humano é chamado de centro de gravidade. Embora sua localização exata possa variar de acordo com a postura, sexo, composição corporal e distribuição de massa, de modo geral, no ser humano em posição anatômica-padrão, o centro de gravidade localiza-se anteriormente à segunda vértebra sacral (S2).
É importante destacar que o conceito de centro de gravidade é muitas vezes confundido com o de centro de massa. Apesar de serem conceitualmente distintos, no corpo humano esses dois pontos geralmente coincidem no mesmo local.
Massa Versus Peso
É comum que os conceitos de massa e peso sejam confundidos, especialmente no cotidiano, em que ambos são usados como sinônimos. No entanto, do ponto de vista da física e da biomecânica, esses conceitos são distintos e fundamentais para a compreensão do movimento humano.
Massa é uma propriedade intrínseca de um corpo e está relacionada com a quantidade de matéria que ele possui. Ela é constante e não depende do ambiente onde o corpo está localizado. Por exemplo, uma pessoa terá a mesma massa estando na Terra, na Lua ou no espaço, independentemente da gravidade presente em cada ambiente. A unidade de medida da massa no sistema internacional (SI) é o quilograma (kg).
Já o peso é uma força, definida como o resultado da atração gravitacional que um corpo celeste (como a Terra) exerce sobre a massa de um objeto. Portanto, o peso depende tanto da massa do corpo quanto da intensidade da gravidade no local.
A fórmula que expressa essa relação é:
P = m ∙ g
Sendo:
P o peso (em Newtons) m a massa (em kg) g a gravidade (em m/s2)
Na superfície da Terra, a aceleração da gravidade (g) é, em média, 9,81 m/s², de modo que o peso de um corpo pode ser calculado multiplicando sua massa por esse valor. Assim, um objeto com massa de 10 kg terá peso aproximado de 98,1 N (Newtons). Em locais com gravidade diferente, como na Lua, o mesmo objeto terá massa constante, mas peso menor, pois a atração gravitacional é reduzida. Do ponto de vista biomecânico, essa distinção é importante porque o peso é a força que o sistema musculoesquelético precisa sustentar ou vencer durante diversas atividades, enquanto a massa representa uma propriedade que não varia. Por exemplo, durante a marcha ou em atividades como o salto, o peso corporal influencia diretamente as forças de impacto sobre as articulações e o esforço muscular requerido para o movimento.
Para facilitar a compreensão, imagine que a massa é o que o corpo é, enquanto o peso é o quanto a Terra o puxa para baixo. Portanto, ao analisar movimentos humanos e suas exigências mecânicas, é o peso que aparece como uma força atuante, e não apenas a massa.
Se a força gravitacional fosse a única atuando sobre nós, o corpo humano não conseguiria se sustentar contra a atração da Terra. No entanto, uma segunda força entra em ação: a força normal. Essa é uma força de reação que surge sempre que há contato entre duas superfícies, sendo exercida pela superfície de apoio sobre o corpo. Por definição, a força normal é sempre perpendicular ao plano de contato.
Por exemplo, ao permanecermos em pé sobre o solo, o peso do corpo empurra para baixo, enquanto o solo exerce uma força de reação igual e oposta, impedindo que afundemos. Essa interação está em total conformidade com a terceira lei de Newton, conhecida como a lei da ação e reação, segundo a qual, para toda força exercida, existe uma força de mesma intensidade, porém de sentido oposto.
Dessa forma, durante o repouso em pé, as forças que atuam verticalmente sobre o corpo humano estão em equilíbrio: a força peso (resultado da gravidade e da massa) é contrabalançada pela força normal. Esse equilíbrio entre as forças garante que o corpo permaneça em repouso ou em movimento retilíneo uniforme, conforme preconizado pela primeira lei de Newton, também chamada de lei da inércia.
Na prática clínica e no estudo do movimento, compreender como a gravidade atua e como a força normal responde a ela é essencial para avaliar padrões posturais, desequilíbrios musculares e desenvolver estratégias eficazes de reabilitação. Por exemplo, em exercícios terapêuticos, muitas vezes manipulamos a orientação do corpo em relação à gravidade para tornar o movimento mais fácil (auxiliado pela gravidade) ou mais difícil (resistindo à gravidade), com o objetivo de reabilitar funções articulares e musculares.
No corpo humano, frequentemente várias forças atuam ao mesmo tempo em diferentes direções. Para compreendermos o efeito combinado dessas forças, precisamos introduzir o conceito de força resultante.
A força resultante é definida como a força única equivalente à combinação de todas as forças atuantes sobre um corpo. Em outras palavras, é a soma vetorial das forças aplicadas. Esse conceito é essencial porque, embora muitas forças possam estar agindo simultaneamente sobre o corpo, é a força resultante que determina se haverá movimento, se ele será acelerado, desacelerado ou se o corpo permanecerá em repouso.
Um exemplo prático pode ajudar a esclarecer: imagine uma pessoa segurando um halter com o braço estendido. Se a força gerada pelos músculos do membro superior for maior que a força exercida
pelo peso do halter, o indivíduo conseguirá elevar o braço. Se for menor, o halter irá puxar o braço para baixo. Se as duas forças forem iguais e de sentidos opostos, o braço permanecerá imóvel, em equilíbrio. Esse equilíbrio ocorre quando a força resultante é nula, ou seja, quando todas as forças que atuam no corpo anulam-se mutuamente. Nesse caso, não há variação de velocidade e o corpo permanece em seu estado atual, seja de repouso ou de movimento constante.
Esse princípio é regido pela Primeira Lei de Newton, também conhecida como a lei da inércia, que afirma: Um corpo em repouso tende a permanecer em repouso, e um corpo em movimento tende a permanecer em movimento com velocidade constante em linha reta, a menos que uma força resultante atue sobre ele
Portanto, compreender a força resultante nos permite interpretar, por exemplo, porque um segmento corporal permanece parado mesmo quando há várias forças atuando sobre ele, ou por que ele entra em movimento quando uma dessas forças se sobressai. No contexto da biomecânica, isso é essencial para a análise do movimento humano, tanto em repouso quanto durante a execução de atividades funcionais.
Quando aplicamos uma força sobre um corpo e essa força tende a causar rotação ao redor de um ponto fixo, não é suficiente analisarmos apenas sua intensidade, direção e sentido. Nesses casos, é necessário compreendermos o conceito de torque, também conhecido como momento de força. O torque pode ser entendido como a medida da eficácia de uma força em gerar rotação em torno de um eixo. Em termos simples, ele representa a capacidade de uma força de fazer algo girar. Imagine, por exemplo, o uso de uma chave inglesa para afrouxar um parafuso. Se aplicarmos a força próxima ao parafuso, será mais difícil girá-lo; no entanto, se aplicarmos a mesma força na extremidade da chave (mais distante do ponto de rotação), será mais fácil girar o parafuso. Esse exemplo demonstra que, além da força, a distância entre o ponto de aplicação da força e o eixo de rotação também influencia a quantidade de torque gerado.
Agora, vamos traduzir essa ideia para a linguagem da física com uma equação simples. Não se preocupe, ela apenas organiza de forma clara a relação que acabamos de discutir com o exemplo da chave inglesa e nos ajudará a entender muitos movimentos do corpo humano:
τ = F ∙ d
F a força aplicada (em Newtons), d a distância perpendicular entre a linha de ação da força e o eixo de rotação.
No corpo humano, a maioria dos movimentos articulares ocorre por meio da rotação dos segmentos corporais em torno das articulações. Assim, compreender o torque é fundamental para entender como os músculos, ao se contraírem, geram movimento. Quando um músculo aplica força sobre o osso, ele cria torque ao redor da articulação, permitindo que o segmento corporal se mova. Quanto maior a distância entre a inserção muscular e a articulação (eixo), maior será o torque produzido, desde que a intensidade da força permaneça constante.
Por exemplo, ao realizar uma flexão de cotovelo segurando um peso, o bíceps braquial aplica uma força no antebraço. A articulação do cotovelo atua como eixo, e a distância entre o ponto de inserção do músculo e o cotovelo determina o braço de alavanca para a geração de torque. Caso essa distância seja reduzida, o músculo precisará aplicar uma força ainda maior para produzir o mesmo movimento. Dessa forma, o torque é essencial para a análise dos movimentos humanos, especialmente porque o sistema musculoesquelético está constantemente gerando torques para vencer resistências, equilibrar forças e controlar os segmentos corporais durante a atividade funcional.
A contração muscular é o mecanismo pelo qual o músculo gera força. Essa força pode ou não produzir movimento, dependendo da interação entre a força exercida pelo músculo e a resistência imposta ao movimento. Do ponto de vista biomecânico, as contrações musculares podem ser classificadas em três tipos principais: concêntrica, excêntrica e isométrica, conforme apresentados no Quadro 1-9.
Esse entendimento é essencial na cinesiologia e na reabilitação, pois diferentes tarefas funcionais e estratégias terapêuticas envolvem distintos tipos de contração muscular.
O conceito de alavanca pode ser definido como um sistema mecânico simples, formado por uma barra rígida que gira ao redor de um ponto fixo, denominado eixo (ou fulcro). A aplicação de uma força nessa barra resulta em torque, que por sua vez, promove a movimentação da alavanca. Esse sistema tem como principal função amplificar forças e otimizar o esforço necessário para movimentar cargas.
Sendo:
τ o torque (medido em Newton-metro, Nm),
No corpo humano, o sistema musculoesquelético representa um sofisticado conjunto de alavancas biológicas. Os ossos atuam como as barras rígidas, as articulações funcionam como os eixos de rotação e os músculos fornecem a força necessária
Quadro 1-9. Tipos de contração muscular e sua relação com o movimento
Tipo de contraçãoDefinição Movimento articularIlustração
ConcêntricaO músculo gera força enquanto encurta, superando a resistência
Excêntrica O músculo gera força enquanto alonga, resistindo a uma força externa maior
Sim
Sentido do movimento ar ticular
Sim
Isométrica O músculo gera força sem alterar seu comprimento, mantendo a posição estática Não
para mover os segmentos corporais. A força muscular aplicada sobre o osso é comumente chamada de força motriz ou força interna, enquanto a carga a ser vencida (como o peso do próprio segmento corporal ou uma carga externa) é chamada de resistência ou força externa.
No contexto da biomecânica, essas forças também podem ser denominadas de forma equivalente na literatura, conforme demonstrado a seguir:
Força motriz = força muscular = força interna = força potente.
Resistência = força externa = força resistente.
Ainda, é importante introduzirmos alguns conceitos relativos à ação muscular, fundamentais para a compreensão da biomecânica do movimento (Quadro 1-10).
Quadro 1-10. Classificação das ações musculares
ClassificaçãoDefinição
Músculo agonista
Músculo antagonista
Músculo sinergista
É o principal responsável pela execução de um movimento específico
Realiza a ação contrária ao músculo agonista
Auxilia no movimento, estabilizando ou complementando a ação do agonista, mas sem ser o principal executor
Sentido do movimento ar ticular

Sem movimento ar ticular

Com base na posição relativa entre o eixo (fulcro), a força muscular e a resistência, as alavancas do corpo humano podem ser classificadas em três tipos distintos, conforme apresentado no Quadro 1-11.
A Figura 1-4 ilustra visualmente essas três classes de alavancas, associando os exemplos cotidianos aos exemplos do corpo humano.
Por fim, é fundamental compreender que, para uma alavanca gerar movimento, a força muscular aplicada deve ser maior que a resistência. Aplicando esse princípio ao corpo humano, se a força gerada pelo músculo não for suficiente para vencer a resistência, não haverá movimento, ou o movimento ocorrerá na direção da resistência. Esse conceito reforça a importância da força resultante, já discutida anteriormente, para a produção de movimento articular.
Exemplo
Durante a abdução do quadril, o glúteo médio é um agonista fundamental, contraindo-se para afastar o fêmur da linha média do corpo
Durante a abdução do quadril (realizada pelo glúteo médio), os músculos adutores da coxa (como os adutores longo, curto e magno) são os antagonistas. Eles realizam a adução do quadril e devem relaxar para permitir a abdução
Durante a abdução do quadril, o músculo tensor da fáscia lata atua como sinergista. Ele auxilia o glúteo médio na abdução, especialmente nos graus iniciais do movimento, e também contribui para a estabilização da pelve
Quadro 1-11. Tipos de alavancas no corpo humano
Tipo de alavancaSinônimoCaracterística
Alavanca de 1ªclasse Alavanca interfixa
Alavanca de 2ªclasse Alavanca inter-resistente
Alavanca de 3ªclasse Alavanca interpotente
O eixo está entre a força muscular e a resistência, ou seja, o ponto fixo de rotação está posicionado no meio
A resistência está entre o eixo (ponto fixo) e a força muscular
A força muscular está entre o eixo (ponto fixo) e a resistência
Exemplo cotidianoExemplo no corpo humano
Tesoura, gangorraExtensão da coluna cervical
Carriola
Pinça
Flexão plantar do tornozelo com o pé apoiado no chão
Flexão do cotovelo: bíceps gerando torque no antebraço
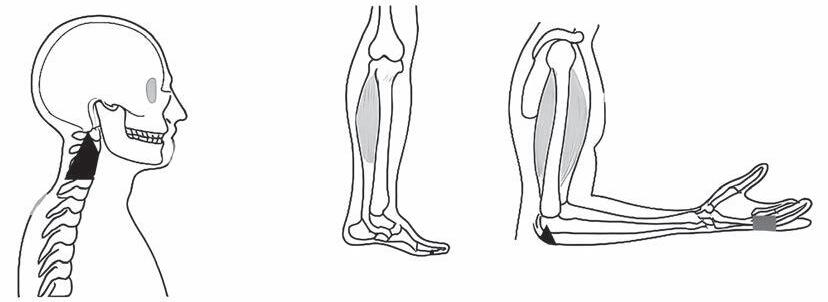

Fig. 1-4. Alavancas (triângulo com a letra E: representa o eixo ou ponto fixo; seta com a letra F: indica a força aplicada ou força potente; seta com a letra R: simboliza a resistência ou força resistente).
No campo da biomecânica, o conceito de polia refere-se a qualquer estrutura que modifica a direção da força gerada por um músculo, podendo também atuar para otimizar o braço de alavanca, aumentando a eficiência da ação muscular. Embora, em mecânica clássica, as polias sejam tradicionalmente compostas por uma roda com sulco por onde passa uma corda, no corpo humano essa função é desempenhada por estruturas anatômicas que redirecionam a linha de tração dos músculos. É importante lembrar que, ao contrário das alavancas, as polias não existem de forma abundante no corpo humano. No entanto, são frequentemente utilizadas em dispositivos mecânicos externos, como equipamentos de musculação e sistemas de tração ortopédica, os quais se valem das propriedades mecânicas das polias para reduzir o esforço necessário e alterar a direção das forças aplicadas.
Na anatomia humana, exemplos clássicos incluem a patela, que redireciona a força do músculo quadríceps e amplia o braço de alavanca para extensão do joelho (Fig. 1-5), e as bainhas fibrosas dos dedos, que funcionam como guias para os tendões flexores, mantendo-os próximos ao esqueleto durante o movimento. Essas estruturas, apesar de não serem polias no sentido mecânico tradicional, agem funcionalmente como tal.
O Quadro 1-12 apresenta os principais tipos de polia, suas definições, funções biomecânicas e exemplos correspondentes no contexto anatômico e clínico.
Ao longo deste capítulo, exploramos os principais fundamentos biomecânicos e cinesiológicos que explicam como o corpo humano se movimenta. Entendemos os conceitos de cinemática e cinética, discutimos como forças e torques influenciam os movimentos articulares, analisamos o papel das alavancas e polias, e classificamos os tipos de contração muscular. Esses conhecimentos constituem
Quadro 1-12. Tipos de polias no contexto biomecânico
Tipo de poliaDefinição
Fixa Polia que redireciona a força sem alterar sua magnitude, estando ancorada a uma estrutura estável
Móvel Polia que se desloca junto com a carga, diminuindo a força necessária para sua movimentação
Polia
Fêmur
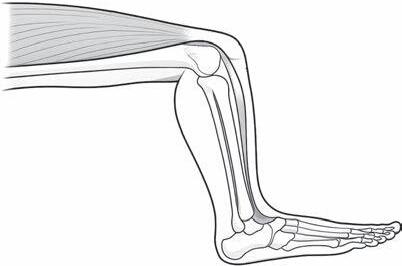
Patela Tendão (ligamento patelar)
Quadríceps
Fig. 1-5. Desenho esquemático da patela, utilizada como polia natural durante os movimentos do joelho.
a base para a compreensão mais aprofundada da cinesiologia aplicada às diferentes regiões do corpo.
No entanto, o verdadeiro desafio, e também a parte mais instigante, começa agora. A partir dos próximos capítulos, você será convidado a aplicar esses princípios teóricos ao estudo dos principais complexos articulares do corpo humano. Iremos explorar como cada articulação se comporta, quais são seus estabilizadores, os músculos que atuam em seus movimentos e as particularidades funcionais de cada segmento corporal. A compreensão dos fundamentos apresentados até aqui permitirá interpretar, de maneira mais crítica e integrada, as demandas biomecânicas envolvidas nos movimentos reais observados em prática clínica, esportiva ou cotidiana.
Portanto, siga adiante. O próximo capítulo levará você ao estudo do ombro, uma das articulações mais móveis e complexas do corpo humano. Mantenha os conceitos aprendidos em mente e prepare-se para conectá-los à prática profissional de forma cada vez mais concreta e funcional. Afinal, o corpo humano é, antes de tudo, um sistema dinâmico, e o conhecimento do movimento é o primeiro passo para intervir com precisão.
Função biomecânica
Altera a direção da força muscular, permitindo maior eficiência do movimento, especialmente ao aumentar o braço de alavanca
Reduz a magnitude da força exigida, mas exige maior deslocamento; utilizada principalmente em sistemas externos ao corpo
Exemplo anatômico ou clínico
Patela: redireciona o vetor de tração do quadríceps femoral na extensão do joelho
Sistemas de tração ortopédica e equipamentos de musculação com cabos e pesos

Um guia prático, objetivo e cientificamente confiável sobre o movimento humano para estudantes e profissionais de Fisioterapia, Educação Física, Ciências do Esporte e outras áreas da saúde.
Cinesiologia Essencial é um convite para entender o movimento humano de forma clara, objetiva e aplicada. Pensado para estudantes e profissionais de Fisioterapia, Educação Física, Ciências do Esporte e outras áreas da saúde, este livro reúne os conceitos fundamentais da cinesiologia e da biomecânica, explicados de forma acessível e conectados à prática clínica e esportiva.
A obra aborda desde os princípios básicos do movimento até a análise detalhada dos principais complexos articulares, organizando o conteúdo por articulação e facilitando a consulta rápida. Os quadros práticos, as definições visuais e a linguagem direta tornam este livro uma ferramenta indispensável para quem busca aprender, revisar ou aplicar os conhecimentos de cinesiologia no dia a dia acadêmico e profissional.
Trata-se de um recurso para quem está iniciando os estudos, para quem deseja reforçar o aprendizado e para quem precisa de um material confiável e didático sempre ao alcance.
ISBN 978-65-5572-366-3
www.Thieme.com.br