2 minute read
AGENT BEHAVIOUR

from AEOLIAN - AADRL
by Salim Hilles

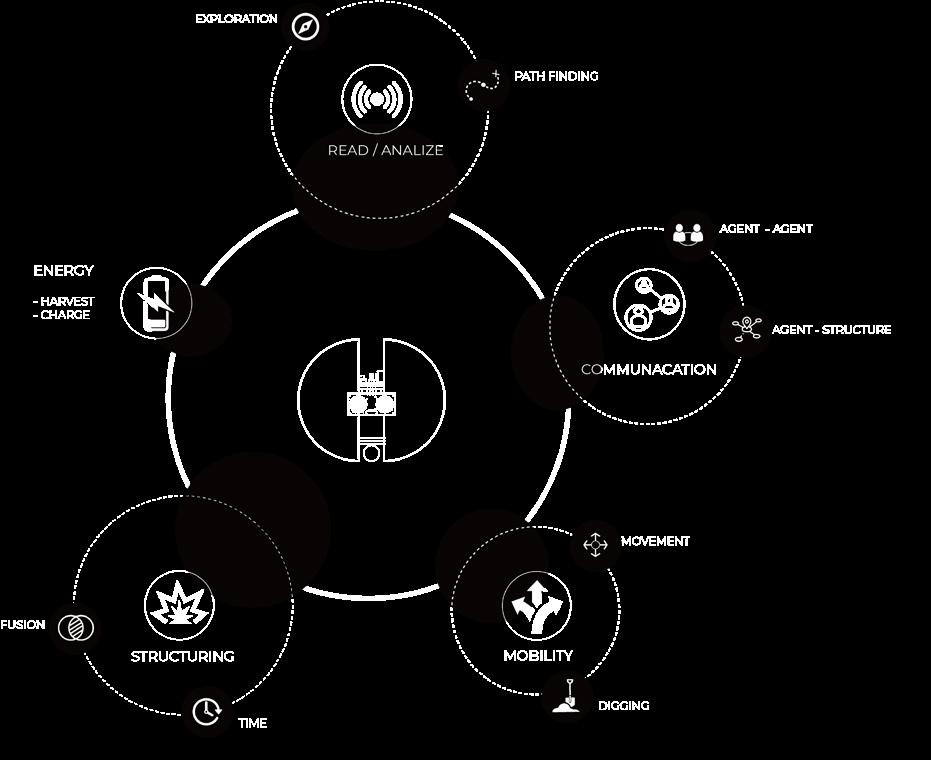
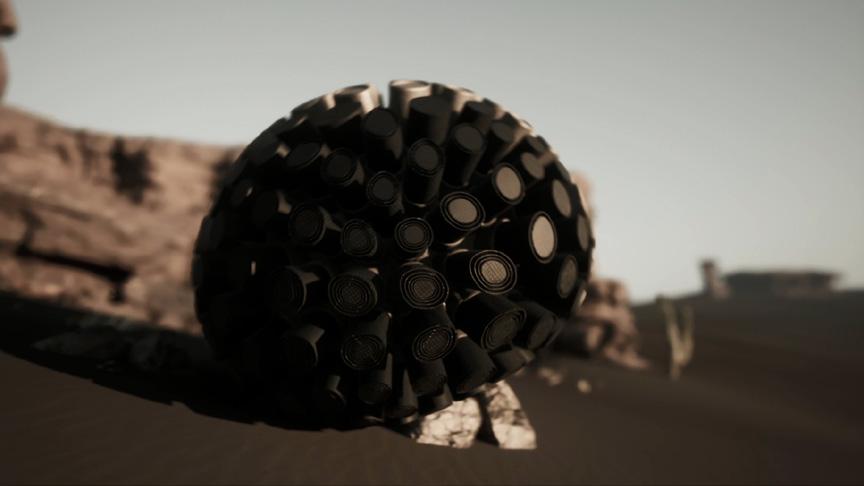
The goal of the agent is to fuse sand into glass, fabricating the structure in the desert. The agent itself employs a range of behaviours, it needs to analyse locally the landscape, communicate with other agents, move on top of sand, fuse the sand and harness energy.
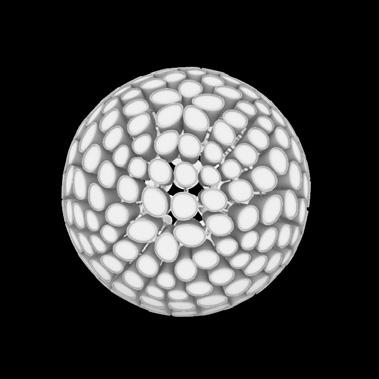
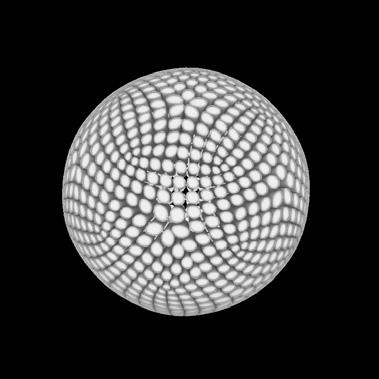
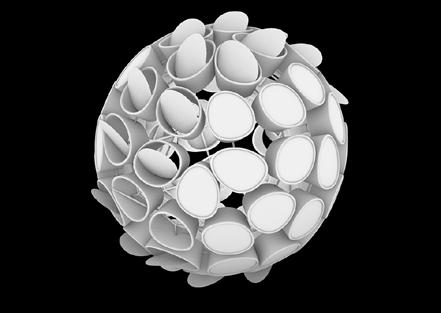
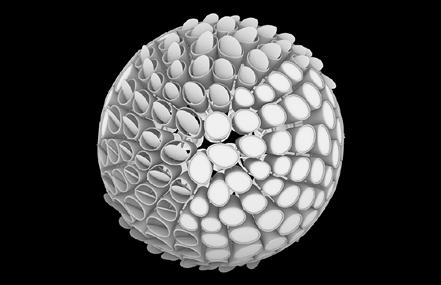
The agent has a primitive form of a sphere, which allows it to roll in all directions. It consists of nodes which make frequency for the movement. Different density of nodes are used for different environments.
Advertisement

Agent
MOTION FLEXIBILITY
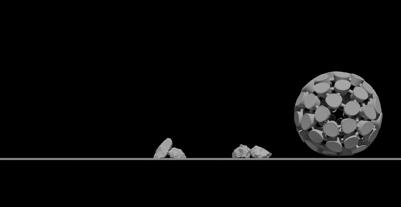
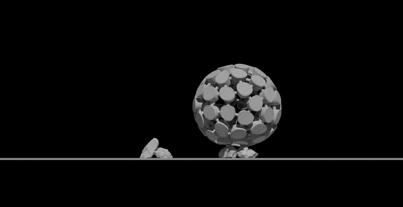
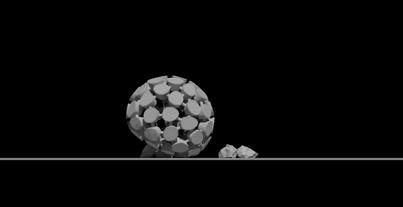
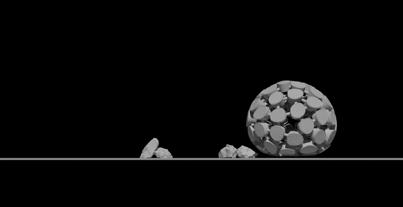
The agent consists of multiple nodes connected together with a spring system, which allows it to be flexible and deform according to obstacles.



Agent
MOTION FLEXIBILITY

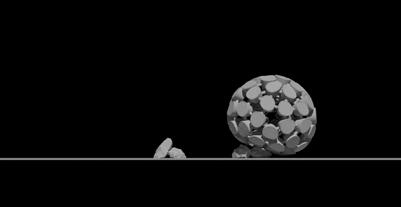
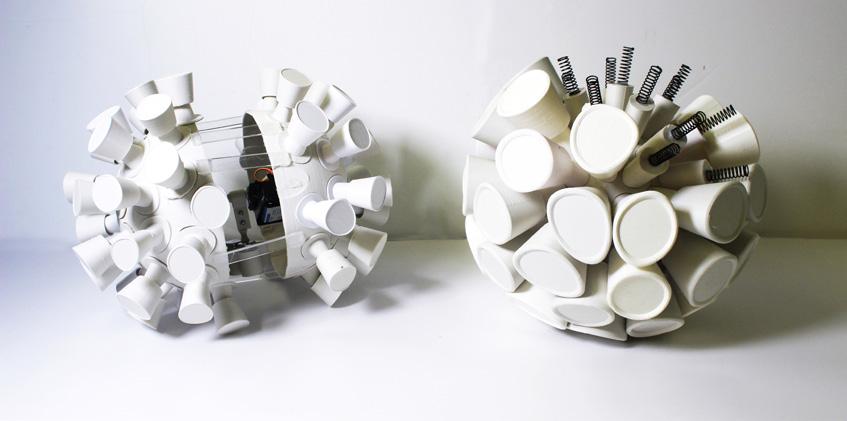
Prototype Spring System


The physical model was designed to simulate the movement of the agents by adjusting the weight hanging from the centre. As the weight rotates around the centre the centre of mass changes, causing the entire sphere to roll. To further emulate the soft-body behaviour of the agents, bouncing components with spring attachments were added to the sphere.


Stable

Robot Prototype Physical Model
The robot employs arduino platform and servo to turn weight to force the whole object to roll.

Agent Behaviour
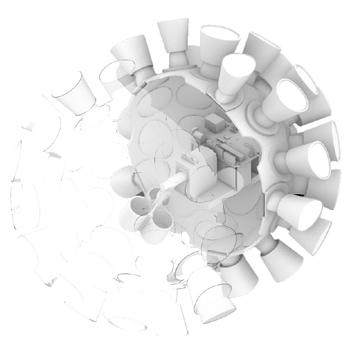
The robot agent is a spherical device with a radius of 50cm. It can open to reveal its protective core, which houses the batteries, motors, and welding equipment. The robot also has sand collecting boxes that direct sand to the welding nozzle. Additionally, it has unfolding solar panels on top, and tubes on the sides that can expand, increasing the surface area for capturing photons. During the welding process, the nozzle moves along the x-axis, leaving a trace with a width of up to 60cm. Once the welding is completed, the robot can close itself and roll to the next welding location.
SAND COLLECTION BOX BATTERIES
SENSORS
PROTECTION CORE
WELDING STATION
WELDING NOZZLE
Agent Energy
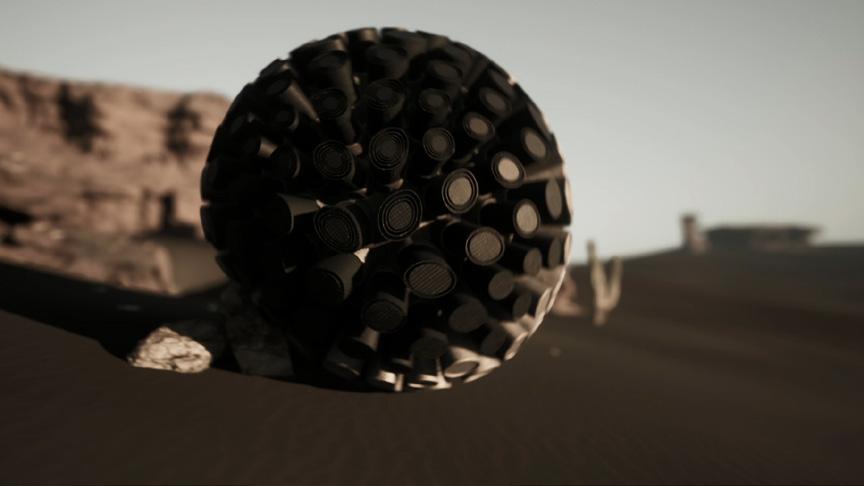
Desert’s environment provides constant access to solar energy, therefore the agent is autonomous harnessing it. The nodes on sides of the agent can expand, unfolding the tubes as a telescope, drastically increasing the surface area. The scale of the robot is generated based on the energy required to be harnessed. Together with unfolding solar panels, extending solar energy capturing tubes on sides reach area of 6.2m2. Which is enough for almost a non-stop welding process. The geometry of them is developed according to the ability of robot to have them employed while its moving. During the night or the sandstorm it can hide them back for protection
UNFOLDING SOLAR PANELS AREA = 0.42 M2
PNEUMATIC SOLAR PANELS AREA = 5.6 M2
OVERALL SOLAR PANELS AREA = 6.2 M2
The robot has the ability to unfold nodes’ outer flat surface for digging function. Nodes located along the movement direction which touch the ground are turning their caps by 30 degrees to catch sand.
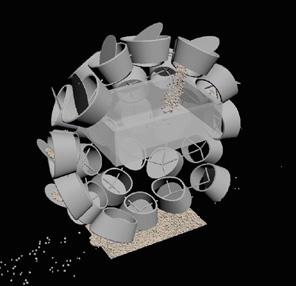
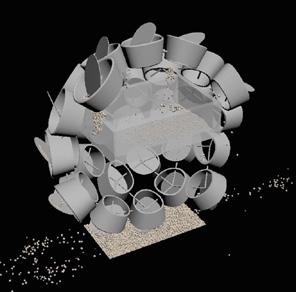
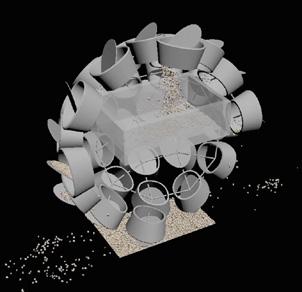


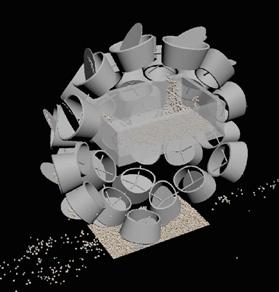
While rolling the agent catches sand with open blades and lifts it up. Located in the upper part, sand fall down by be gravity force. Purified sand is collected in containers to be used later.









