5 minute read
LAYER

from AEOLIAN - AADRL
by Salim Hilles

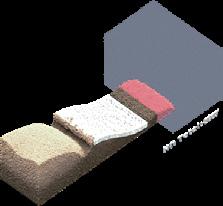
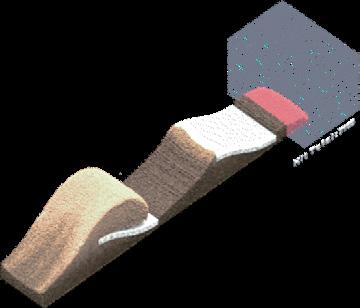
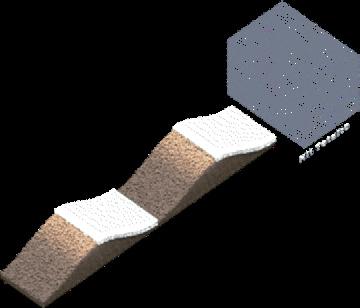
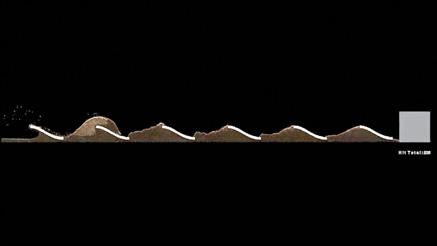
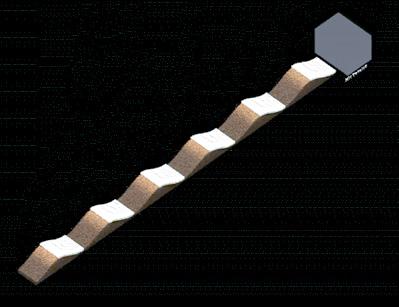
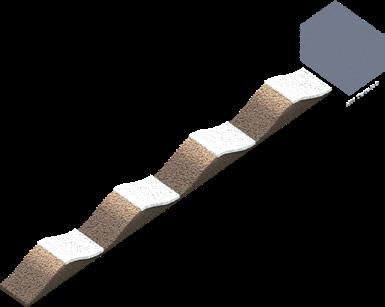
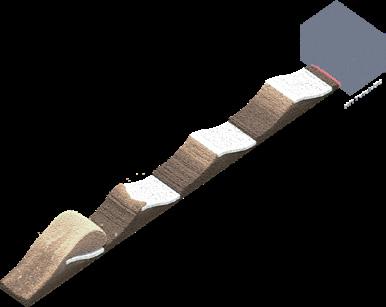
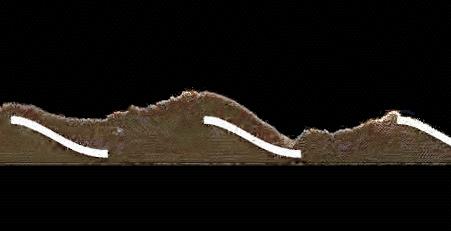
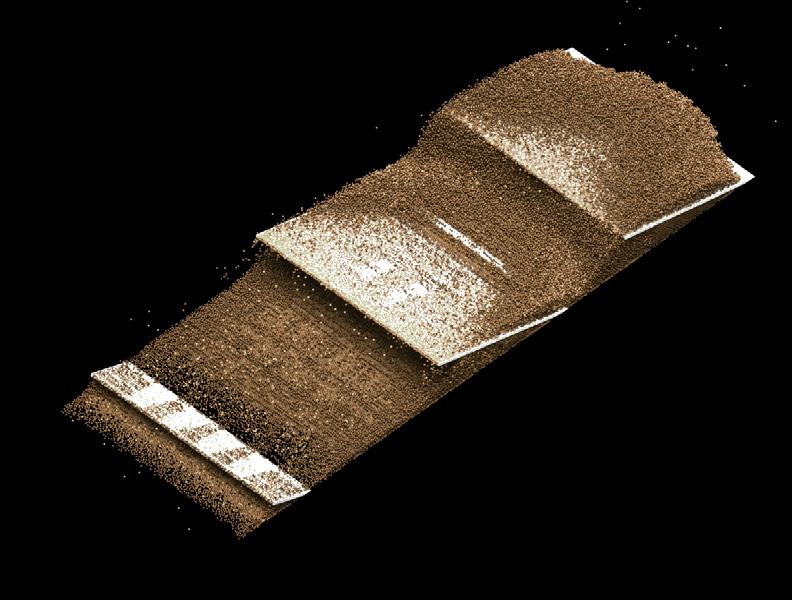
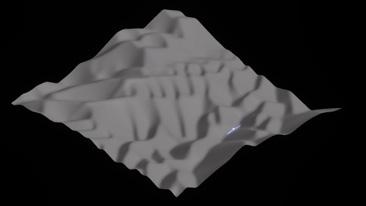
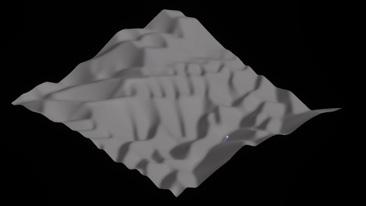
The addition of layers improves the structure’s effectiveness at redirecting sand particles, as demonstrated by our simulations. As the number of layers increases, the structure’s morphology blends with the desert, becoming partially buried yet still fully interactive with the terrain.
Advertisement
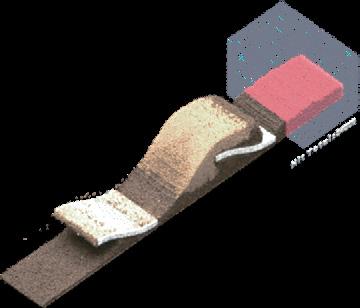
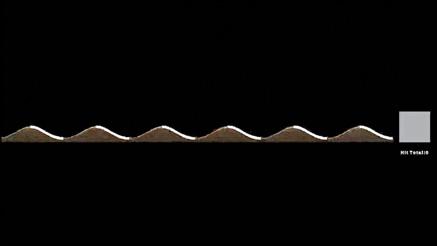


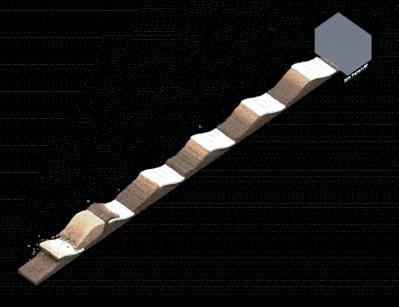
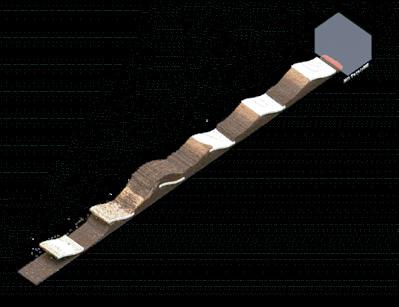
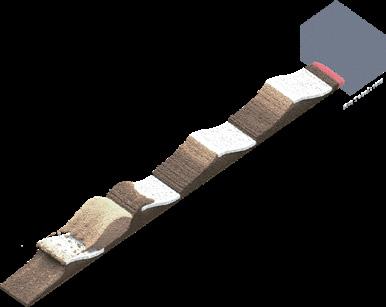

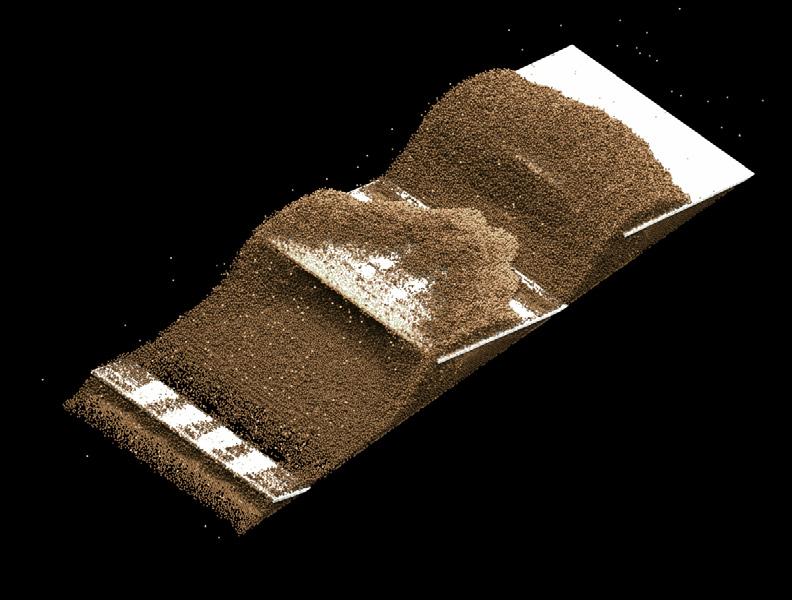
Sand Blowing Experiments
The aim of the experiment was to evaluate the effect of various angle configurations of the structure on dune on the diversion of sand particles using a sand physical model. Four different angle settings were tested in conjunction with three collection boxes and a pre-determined weight of sand. The results of this study will provide insights into the effectiveness of the structure in redirecting sand flow.
Iteration 1-1
Time: 2mins
Layers: 1
InitialDune: 2000g
WindType: FixedPoint
SandCollecting: 38% / 29%/ 33%
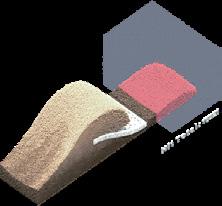
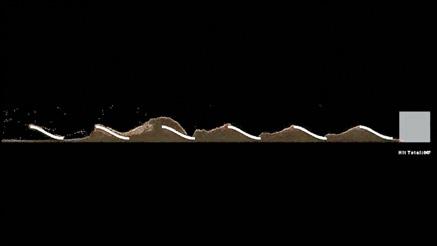
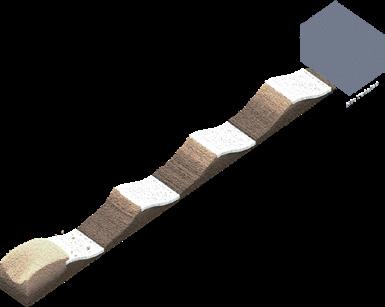
Sand Blowing Experiments
The experimental results indicate that when the structure is oriented towards the front of the dune, the majority of sand particles will pass over the structure. However, when the structure is placed at the rear of the dune, it is more effective in redirecting sand flow. Furthermore, when the structure is angled diagonally towards the dune, a higher percentage of sand particles will be directed towards the corner.
Iteration 2-1
Time: 2mins
Layers: 1
InitialDune: 2000g
WindType: Sliding
SandCollecting: 36% / 34%/ 30%
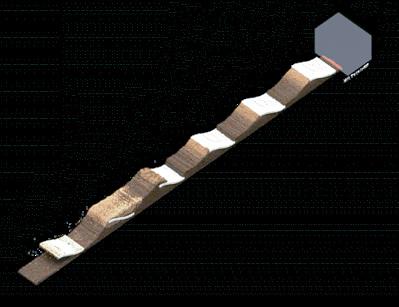
Iteration 1-2
Time: 2mins
Layers: 1
InitialDune: 2000g
WindType: FixedPoint
SandCollecting: 38% / 29%/ 33%
Iteration 1-3
Time: 2mins
Layers: 1
InitialDune: 2000g
WindType: FixedPoint
SandCollecting: 44% / 29%/ 27%
Iteration 1-4
Time: 2mins
Layers: 1
InitialDune: 2000g
WindType: FixedPoint
SandCollecting: 31% / 30%/ 39%
Iteration 2-2
Time: 2mins
Layers: 1
InitialDune: 2000g
WindType: Sliding
SandCollecting: 38% / 30%/ 32%
Iteration 2-3
Time: 2mins
Layers: 1
InitialDune: 2000g
WindType: Sliding
SandCollecting: 42% / 30%/ 28%
Iteration 2-4
Time: 2mins
Layers: 1
InitialDune: 2000g
WindType: Sliding
SandCollecting: 38% / 31%/ 31%
Sand Blowing Experiments

Iteration 3-1
Time: 4mins
Layers: 2
InitialDune: 4000g
WindType: Sliding
SandCollecting: 37% / 32%/ 31%
Iteration 3-2
Time: 4mins
Layers: 2
InitialDune: 4000g
WindType: Sliding
SandCollecting: 38% / 32%/ 30%
Iteration 3-3
Time: 4mins
Layers: 2
InitialDune: 4000g
WindType: Sliding
SandCollecting: 40% / 32%/ 28%
Iteration 3-4
Time: 4mins
Layers: 2
InitialDune: 4000g
WindType: Sliding
SandCollecting: 38% / 33%/ 29%
Collective
AGENT BASED SYSTEM
Collective Behaviour
AGENT-BASED SYSTEM
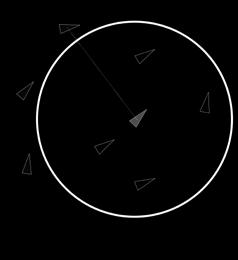
Flocking
SELF-ORGANIZATION BEHAVIOURS
Agents utilize the boids algorithm to create a self-organizing, self-regulating, and emergent system. This allows the derivation of the structure to become a product of a bottomup generative approach.
The proposal looks at a high population of agents that can be deployed on-site and whose agency whose agency will be to replicate the physical experimentations of fusing sand and changing it’s material properties to that of glass. Several behaviours were explored to solve for various optimization challenges in the system.
Separation
Parameters include separation radius and separation force, the radius dictates an area for which this function will take action whilst the force applies a level of strength to how far must agents separate from one another if within the radius.
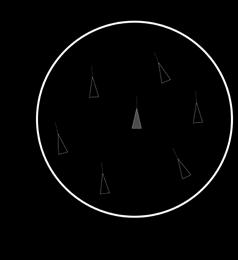
Flocking
The self organization of agents flocking generates a collective motion rather than an individualistic motion. Allowing for a bottom-up emergent behaviour in the agent based system.
Stigmergy - Path Following
Certain aspects of stigmergic were taken to create a mechanism of co-ordination through the environment. This is enabled using the pheromone function, which gives agents the ability to read the generated structure. This is utilized for stray agent to find their way back by following the structure.
Path Finding - Shortest Path
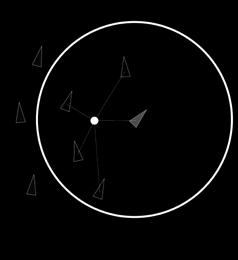
The pathfinding algorithm was used to allow the agents to navigate through the dunes using the shortest of all possible paths to reduced the amount of energy used in traveling.
Alignment
The alignment function controls the steering behaviour of the overall herds or flocks and the neighbours. Parameters include alignment radius the radius dictates an area for which agents will be visible to one another to form an aligned group.
Cohesion
The cohesion function controls how agents come together to form a single flock or herd. Parameters include cohesion radius and cohesion force. The radius dictates an area for which this function will take action whilst the force applies a level of strength to how fast should agents steer and move towards each other.
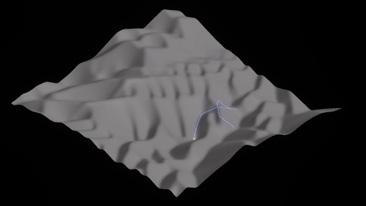
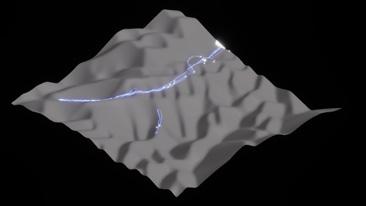
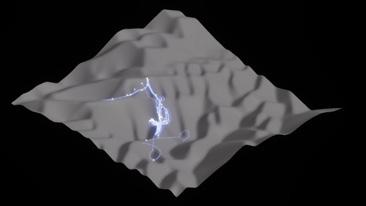
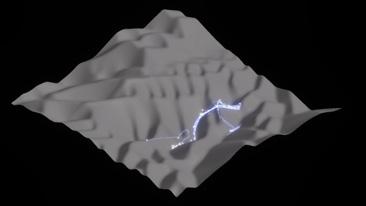
Pathfollowing Pheromone Trails
The stigmergy behaviour aspects were employed on the next simulations. Agents will release pheromone trails along the path as traces in the landscape. These trails are for communication of the agents. Pheromone trails will attract other agents to track the path and continue in the direction as a group to fuse the material. The pheromone trails will vanish after time, defining the path that has already finished construction. This simulation is divided into two sections, low population and high population, to identify the shape, density, and speed of construction. High
PATHFINDING & SHORTEST PATH
DERIVING A NETWORK OF OPTIMAL PATHS & MOBILITY
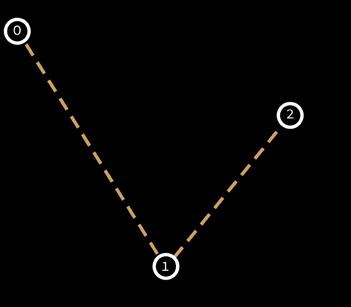
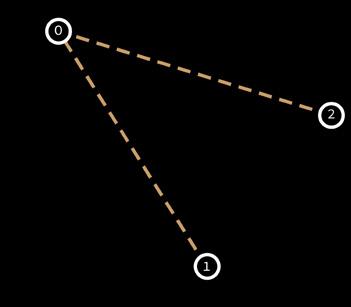
To generate an optimal network of paths for the robotic agents to move and fuse sand to glass in a process of constructing a barrier-like structure, a shortest path algorithm was developed due to its generative approach to build a network of possible pathways towards certain points in a terrain, calculating all possible path iterations until it problem solves the shortest possible path. To solve for the shortest path, the team devised a lexicographic order algorithm to pass through each point in the system. Lexicographic order is a mathematical generalization used for sorting items in a way that uses an algorithm based on alphabetical order. For example, a lexicographic order with 3 points would be the following :
Therefore, to further optimize the computation, the team shifted from a lexicographical order towards a genetic algorithm or G.A. This process is inspired by the process of natural selection from evolutionary algorithms. How it works, is that the system randomly populates with possible connections between points. Each connection is then given a fitness score. The system with the highest fitness score continues on the evolution tree whilst those with lesser scores die out of the system. The shorter the path, the higher the fitness score.
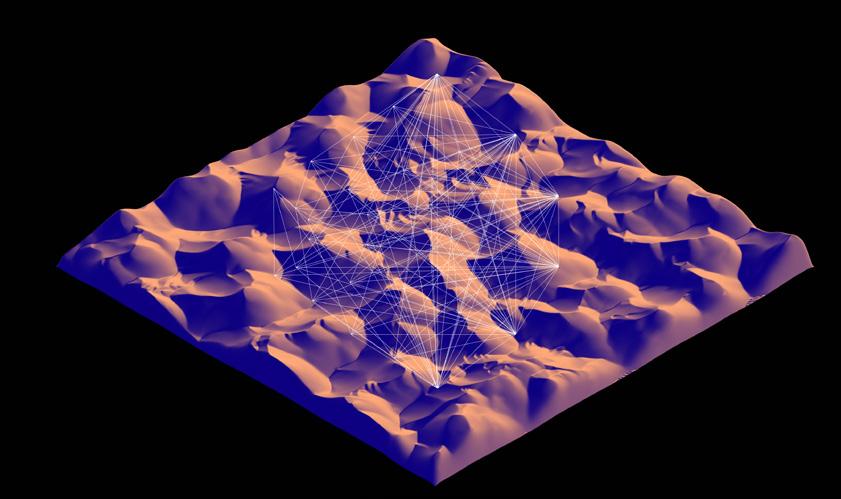
STEP 1
Each frame, a random order would be generate to connect all the points. In the example below, 2 frames are generated in 0.001 seconds of computation. As there are 3! = 6, possible permutations. Therefore must be 6 frames overall to calculate all possibilities.
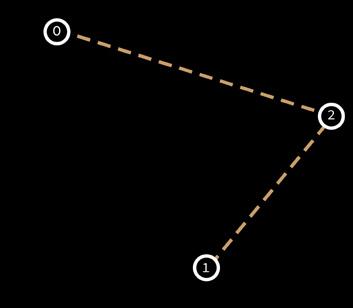
STEP 2
However, this methodology proved to be too slow to calculate when there are 10 points or higher. This is due to the fact that each the number of permutations needed to be calculated is equals to the number of points factorial, therefore the higher the number of points, the longer the computation requirements. Especially since the computer program runs at around 50-100 per second. A number too small when it comes to 10 points or higher. The diagram on the right illustrates the number of permutations per number of points.
Calculate the fitness score by equalizing it with the distance travelled and then normalize it to create a score between zero and one.
STEP 3
Create a genetic pool where the best few permutations engage into what is called Crossover in evolutionary algorithms. The items, chosen to be part of a genetic pool are based on the fitness score, the higher the fitness score, the more likely they will be chosen to engage in a crossover. When two items crossover, 50% of both DNA in a pool or extracted and placed into a new item which is called a child. For optimization purposes, it is important to make sure that the DNA extracted from one item is different from the other.
Collective Behaviour
Constructing A High Population Cybernetic System
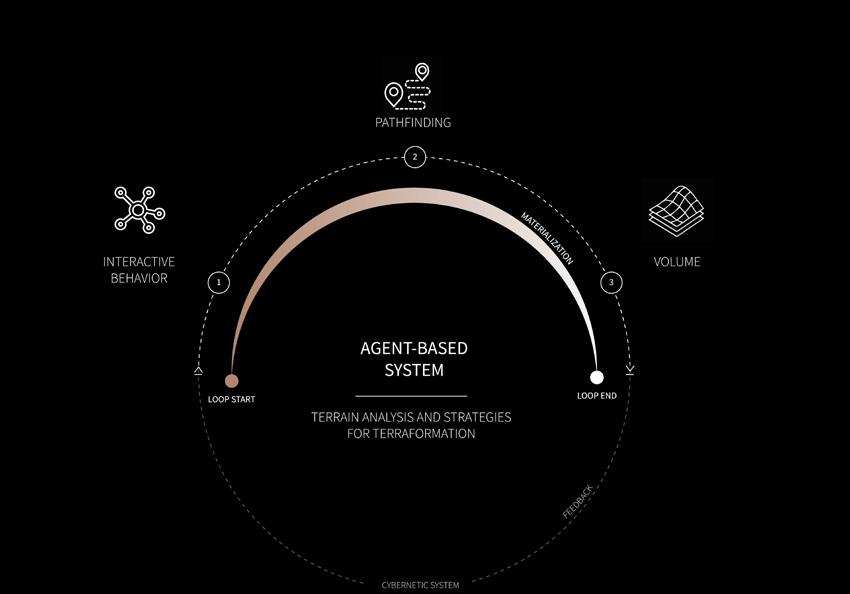
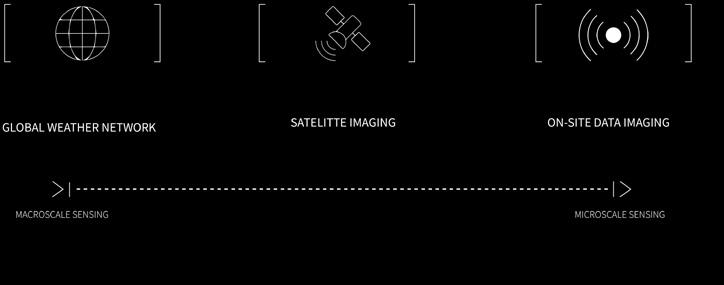
The collective behaviour of these agents is defined by its mediums of communications with the landscape from a more global overview and understanding, towards a local bottom-up intelligence. A cybernetic system is generated as the process relies on an continuous dialogue between machine and the dynamic landscape, creating a nonlinear feedback loop between both entities. The following diagram represents the behaviours of these agents in relation and in dialogue with the desert terrain.
Each level of data sensing would be captured from different scales of observation. For macroscale sensing, global weather networking stations are utilized to generate data on natural phenomena such as temperature, lighting, and wind ...etc. To create strategies based on the dynamism of the terrain and its time-based states, satellite imaging becomes an essential tool to develop this understanding. Finally, on a more microscale sensing, the agents include data imaging components allowing them to read the conditions of their neighbouring agent and the fused glass.