



The magazine of choice for Ocean Robotics focused Professionals 36 ISSUE Q3 / 2023 Sarcos Guardian® Sea Class: Making Underwater Manipulation Look Easy 9. Sailboard or Submarine? It’s Both! 51. Greensea IQ Set to Transform the World of Ocean Robotics 19. Athena™: Unlocking Faster Response Time for Remote Underwater Work 29.


videoray.com | +1.610.458.3000 Mission Specialist underwater robotic systems are engineered to work hard. With powerful thrusters to handle currents up to four knots. A modular platform built to handle heavy payloads and a wide array of accessories. And durable construction that can take a beating and keep on working. That’s how we’re redefining “inspection class” to give you the performance you really need. The power you need to get tough jobs done ©Copyright 2023 VideoRay LLC. Photo credit: Rich Arietta




Connecting What’s Needed with What’s Next™ Connect with what’s next at oceaneering.com Copyright © 2023 Oceaneering International, Inc. All rights reserved. SUSTAINABLE SOLUTIONS We’re engineering solutions for the future of energy. Our autonomous and remote technologies help solve critical challenges in some of the toughest environments around the world. Visit us at Offshore Europe Stand 2J40
TABLE OF CONTENTS
06. Events Calendar & Welcome to Ocean Robotics Planet
09. Sarcos Guardian® Sea Class: Making Underwater Manipulation Look Easy
15. Film-Ocean Redefines Offshore Operations with Innovative Remote ROV Support Services

19. Greensea IQ Set to Transform the World of Ocean Robotics
25. How Blueye Develops ROV Technology: The Hardware, the Software, and the Core Values of User Friendliness

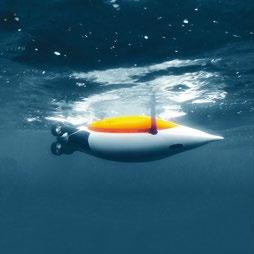
29. Athena™ Unlocking Faster Response Time, Every Time, for Remote Underwater Work
32. Poster: Schilling Robotics’ Athena™ Tooling Interchange System
35. A Next Generation Seabed Coring Solution

41. North Korea’s New Underwater Drone: Haeil
45. The U.S. Navy’s “Hybrid Fleet”: A Concept of Operations for Achieving a Navy Fleet of 500 Ships
51. Sailboard or Submarine? It’s Both!
55. Unveiling the Titanic’s Secrets: An AUV Mission to Explore the Depths
ISSN 2755-239X
EDITOR-IN-CHIEF
Richie Enzmann
COPY EDITOR
Will Grant
SALES DIRECTOR
Nick Search
DESIGN & LAYOUT
Milan Farkas
CONTRIBUTORS
Richie Enzmann, Al Rumson, Ben Kinnaman, David Blubaugh, David Lee, George Galdorisi, Hayley Yule, H I Sutton, Marc Deglinnocenti, Oda Ryggen
SPECIAL THANKS TO Audrey Leon, Bill Mallin, Chris Gibson, Christian Blinkenberg, Curtis Lee, Dawn D'Angelillo, Debbie MacKenzie, Francisco Bustamante, Gautier Dreyfus, James Colebourn, Jeroen Romijn, Jack Rowley, Jill Bell, John Benson, John Bloomfield, Jostein Jansen, Julian Lalanne, Julie McLaughlin, Karoll Audibert, Marion Seyve, Matt Bates, Matthieu Scheffers, Paul Fletcher, Rachel McAlpine, Rob Howard, Scott Archer, Silke Braham, Victor Sepulveda, Willard Balthazar
Adepth Minerals
Advanced Navigation
BEC Plastics
Blueprint Subsea
Blueye Robotics
DeepOcean
DeRegt Cables
Digital Edge Subsea
Engineered Fluids
EvoLogics
Exail
Film Ocean

Forssea Robotics
Greensea IQ
Kystdesign
Norwegian Offshore Rentals
Ocean Aero
Oceaneering
Oceanscan
QYSEA
QSTAR
RTSYS
Saab Seaeye
Sarcos Robotics
Silicon Sensing
TechnipFMC
Tritech
U.S. Navy
VideoRay
Zetechtics
WWW.OCEANROBOTICSPLANET.COM
15. 25. 35.
Front Cover Image: Courtesy of Sarcos Robotics Poster Image: Courtesy of TechnipFMC
EVENTS CALENDAR 2023
SEPTEMBER
SPE OFFSHORE EUROPE
Aberdeen, Scotland, UK (5–8 September 2023)
DSEI (DEFENCE AND SECURITY EQUIPMENT INTERNATIONAL)
London, UK (12–15 September 2023)
MTS/IEEE OCEANS GULF COAST
Biloxi, MS, USA (25–28 September 2023)
UNMANNED MARITIME SYSTEMS TECHNOLOGY USA
Arlington, VA, USA (27–28 September 2023)
My name is Richie Enzmann. Allow me to welcome you all to the latest issue of Ocean Robotics Planet!

WELCOME TO OCEAN ROBOTICS PLANET!

Dear Reader,
OCTOBER
FLOATING OFFSHORE WIND
Aberdeen, Scotland, UK (3–5 October 2023)
IEEE METROSEA
Malta (4–6 October 2023)
REUTERS EVENTS:
OFFSHORE & FLOATING WIND EUROPE 2023
London, UK (25–26 October 2023)
Our ocean robotics world was recently propelled into mainstream news coverage because of the OceanGate tragedy in June. Many people aired their opinions on what went wrong, but ocean exploration can be a risky endeavour even when the rules are followed. Our condolences go to the families and friends of the people involved in this tragedy.
NOVEMBER
MARINE AUTONOMY & TECHNOLOGY SHOWCASE (MATS)
Southampton, UK (7–9 November 2023)

HYDRO 2023
Genoa, Italy (7–9 November 2023)
OFFSHORE ENERGY
Amsterdam, The Netherlands (28–29 November 2023)
UNDERWATER INTERVENTION
New Orleans, LA, USA (29 Nov – 1 Dec 2023)
This event also made me realise how small and tight knit our industry is, as the rescue and then recovery response went on. We are all explorers with a love for the ocean and a sense of adventure, but the deep sea can be a hostile and treacherous place to that we must be aware of. In my opinion, this tragedy should in no way hinder our ongoing search of the abyss, as we need to know more about our oceans in this decade than ever before.
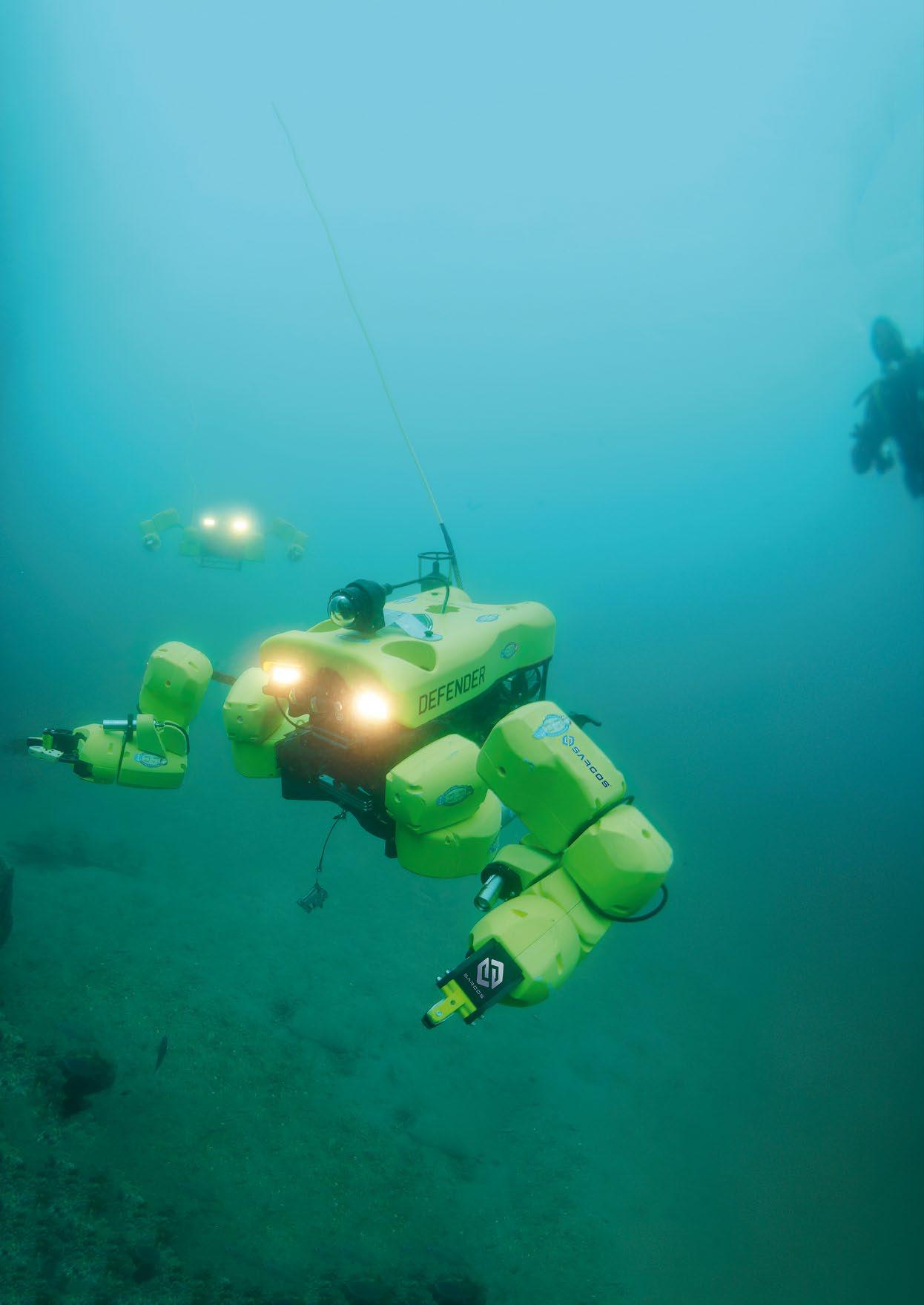
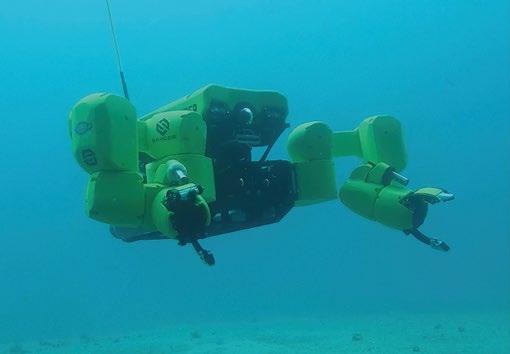
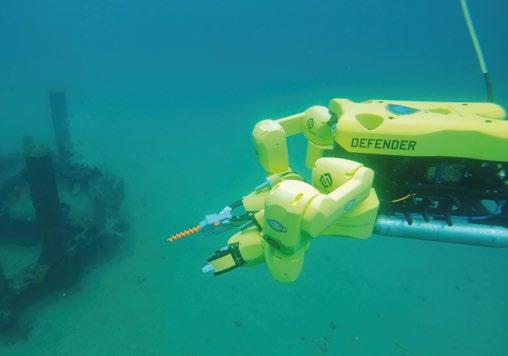
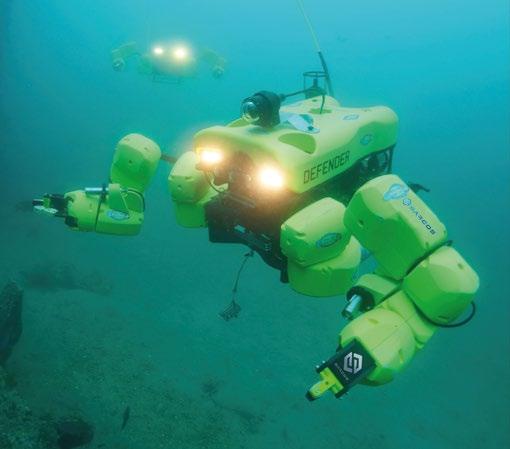
On the front cover of this issue, you can see a VideoRay Defender sporting an amazing looking pair of Sarcos Robotics arms. There is an equally spectacular looking Athena arm as the centrefold of this issue. This is not only a manipulator, but a position controlled hydraulic tooling interchange system that can be integrated into existing ROVs. We take a look at both these manipulators in much more detail.
JANUARY
MARITIME RECONNAISSANCE & SURVEILLANCE TECHNOLOGY
London, UK (29–31 January 2024)
FEBRUARY SUBSEA EXPO
MARCH
Aberdeen, UK (20–22 February 2024)
OCEANOLOGY INTERNATIONAL
London, UK (12–14 March 2024)
WINDEUROPE
Bilbao, Spain (20–22 March 2024)
APRIL SEA AIR SPACE
National Harbor, MD, USA (8–10 April 2024)
UNDERSEA DEFENCE TECHNOLOGY (UDT)
London, UK (9–11 April 2024)
MCEDD
Amsterdam, The Netherlands (9–11 April 2024)
MTS/IEEE OCEANS
Singapore (14–18 April 2024)
Subsea mining is starting to take momentum up on the Norwegian shelf, and DeepOcean has designed an intriguing seafloor robot called the FlexiCore. This is a tracked underwater crawler that can make sediment sampling and coring more efficient as a tool for subsea mining.
On the military side of things, George Galdorisi shares his thoughts on what the concept of operations (CONOPS) for the U.S. Navy’s new hybrid fleet of 500 ships should look like. Meanwhile, HI Sutton takes a peek at Kim Jong Un’s new superweapon, the Haeil underwater drone.
Finally, we sat down with Ben Kinnaman to talk about the reasons for consolidating his three companies into Greensea IQ, to find out where the journey will take him to. We will be visiting him and his team at the Defence and Security Exhibition (DSEI) in London where the official unveiling of the new company will take place. Feel free to join us for this event, where you can also grab a printed copy of our magazine.
Best regards,
Richie Enzmann
For more information about all events visit www.oceanroboticsplanet.com
SMART SUBSEA SOLUTIONS




Delivering data in most adverse conditions: underwater acoustic modems with advanced communication technology and networking





Accurate USBL and LBL positioning of underwater assets
Modem emulator and other cost-saving developer tools
Autonomous surface vehicle for bathymetry, monitoring, search & rescue, and AUV support





sales@evologics.com sales-us@evologics.com

EvoLogics.de
MULTIBEAM SONAR for the Sonobot 5 vehicle available now!
New

SARCOS GUARDIAN® SEA CLASS: MAKING UNDERWATER MANIPULATION LOOK EASY
The new Sarcos Guardian Sea Class robot has taken the subsea market by surprise. With an astonishing human-like manipulator design, the Guardian Sea Class is filling the gap between observation and light, work-class ROVs through enhanced performance of intervention tasks and further augmentation of observation-class ROV capabilities.

| 9
Richie Enzmann, Ocean Robotics Planet
Courtesy of Sarcos Robotics
Since the early 2000s Sarcos has provided a wide range of robotics solutions. Initially focusing on land-based machinery for the military, they were at one point the robotics division for Raytheon, where much of their work was focused on exoskeletons and prosthetic and robotic arms. Following the recent acquisition of RE2, Sarcos Robotics has become a 225-employee company, with offices in both Salt Lake City and Pittsburgh. The advent of the Guardian Sea Class arms was historically driven by RE2’s work with the Department of Defense, conducting explosive ordnance disposal on land. Then, five years ago, the company received a request from the Office of Naval Research (ONR) who wanted them to take that system and marinize it for autonomous neutralisation of underwater mines. The result of this marinization effort was the development of the Guardian Sea Class manipulator arm.
Now, Sarcos is on a mission to commercialize this technology and offer it to broader industries. This includes subsea oil and gas, renewables, ship husbandry, and other marine and diving-related industries where diver and ROV operations could be further augmented.
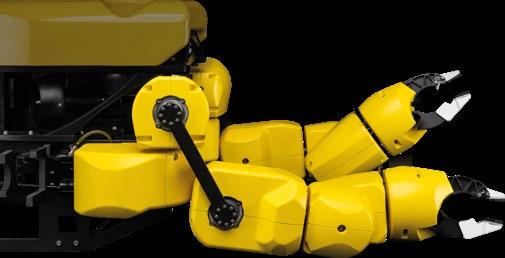




This manipulator system is enabling observation class ROVs to perform work that was only possible with light, work-class ROVs in the past. Furthermore, as standard practice, two pilots are required to operate light intervention systems with usually one pilot controlling the ROV sitting next to another that controls the manipulator, or a single user jumping between two systems. According to Sarcos, their alternative manipulator system uses a single-operator approach that is enabled by the arms being more capable with higher speed, greater precision, and better control.
10 | SARCOS GUARDIAN® SEA CLASS: MAKING UNDERWATER MANIPULATION LOOK EASY
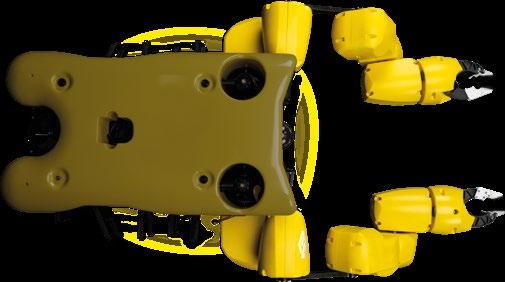
Courtesy of Sarcos Robotics
Courtesy of Sarcos Robotics
Courtesy of Sarcos Robotics
ROVs equipped with the Sarcos manipulator system are not intended to replace divers. Rather, the combination is designed to further enhance divers’ capabilities when working underwater and let them focus on tasks requiring human judgment and capability while allowing a robotic arm solution to complete dangerous tasks and help keep them out of harm’s way. Divers might be underwater for long durations, but the time they have to actually focus on their assignment is even more limited. The Guardian Sea Class also has the potential to increase their productivity when working in challenging underwater environments.


PRESSURE RATING
Currently, the Guardian Sea Class arms are integrated into a VideoRay Defender ROV rated to 300m. However, the Guardian Sea Class arms were tested up to 1,000m in the ocean – the depth floor of the VideoRay system – but they've also been tested in a pressure chamber up to 2,000m. This means that there’s also the option of mounting them onto light workvehicles.
One advantage of using a pair of Sarcos robotic arms is the ability to station-keep even in turbulent waters without the use of high-end sensors. By gripping onto something with one arm, you can then readily use the other arm to perform a certain task. This enables you to carry out work on a ship even if it’s moving by latching on to it, and the ROV doesn’t have to hover around it at a different speed.
WORKING CONFIGURATION
But how does the arm work as a system? Unlike other manipulators, the Guardian Sea Class robotic system allows for the coordinated control of both arms and the vehicle through a single, motion-capture controller system; each arm is essentially a separate robot, with a single user performing coordinated motions while also controlling the vehicle. The arms are mounted onto a VideoRay Defender with a single tether going back to the surface. This allows coordinated control between the vehicle and the arms using a single user interface on the surface, called the imitative controller. Basically, this is a wearable harness that allows the operator to completely control the arms through imitative movement, making underwater tasks much easier compared to manipulation with joysticks.
This wearable harness has joint-by-joint control in each of the arms that allows exceptional precision while performing tasks. The hand controllers themselves can control the roll, pitch, yaw, forward, back, dive, tilt, and camera angle of the vehicles, delegating these movements to a separate part of the configuration. You also have gripper control, allowing for opening, closing, and infinite spinning of the grippers. Overall, it’s a very intuitive system to use and is intended to give a diver or experienced operator the ability to be there in a situation room context.

| 11
Courtesy of Sarcos Robotics
Courtesy of Sarcos Robotics Courtesy of Sarcos Robotics
The system also includes cameras on each of the arms, providing additional views in addition to the vehicle camera. The manipulator operator control station (OCS) provides the camera views and easily mounts to the Pelicase from VideoRay.

PORTABILITY IN MIND
The system is highly portable and can be packed into four or five large Pelicases depending on the mode of transport: one case for the left arm, one case for the right arm, one case for the vehicle with the skid, and one to two cases for everything else, including the imitative controller, the OCS, a spares kit, and a tether (at least a length of 100m). This flexible packing configuration allows the operator to transport the system as oversize luggage on an aircraft. Net benefit: If someone needs to get somewhere with an ROV very rapidly, this is a system that’s made to travel.
The design is two-person portable and very easy to deploy. A team of two can pick it up and carry it to an operating location fully assembled. They can push it off the side of a rigid inflatable boat (rib) and recover it without equipment or use any small davit to help the vehicle in and out of the water. Additionally, the arms are neutrally buoyant: something that differentiates them from their competitors.
The arms feature continuous roll joints in the wrists, allowing you to grab an object or tool and then turn endlessly. The arms are capable of teleoperation and semi-autonomous motion, but the semi-autonomous motion is exciting. If you are operating a robot underwater, the hardest thing to do is to get the right tool into your hand. For example, the user can push a button to indicate the need for a tool from slot 4, and then have a knife, scraper, or other object in the correct hand.
This functions like a tool changer system. Essentially you can have basic tools, and then, if you put a handle on them that is suitable for the gripper, then you can turn that system into a variety of tools that can be used underwater. If you have a regular scraper and then add a simple clamshell 3-D printable plastic piece onto it, it becomes a tool that can be gripped correctly, held securely, and stored in a tool slot. You can then reach back, grab it, and use it as required.
Sarcos has developed a series of tools thus far, such as knives, scrapers, a brush, etc. With this highly dexterous robotic arm solution, it easily picks up knives; untangles or cuts ropes; measures things; and many more complex actions.
HEAVY WEIGHT
Sarcos claim on their datasheets that one arm can lift 16.5 lbs (7.5kg) at full extension. However, in close working environments, the arms can lift significantly more. They have demonstrated it to be very capable and reliable in undersea field trials where they dive down to a kilometer while carrying payload and running through a range of intervention tasks.
One might wonder how difficult or easy it is to operate these sophisticated manipulators. Is a lot of training required? In the past, when I did ROV training, I found the manipulator control to be one of the most difficult tasks. Flying the vehicle was rather easy. However, grabbing onto something, correctly judging the distance with one arm while operating the ROV, and controlling it with a joystick: this all requires a lot of practice to do well.
Sarcos described the training process when a new group of users recently trialed these manipulators. The participants hadn’t seen the system before and, as part of the one-day course, Sarcos reps trained them to operate the vehicle and use the tools. Each of the eight users was given five minutes of training and 20 minutes of stick time. Following the training, every single one of them was able to dive down to a specific point, find an object, grasp it, and then change it to the other hand.
In our estimation, this new manipulator solution is very advantageous for mine countermeasures, and a range of other activities. It stands poised to open an even wider range of use cases and opportunities for smaller ROVs that are currently only used for observation purposes.
12 | SARCOS GUARDIAN® SEA CLASS: MAKING UNDERWATER MANIPULATION LOOK EASY
Courtesy of Sarcos Robotics
Courtesy of Sarcos Robotics






Cable solutions that challenge the status quo
Which design considerations are the most important for your project? And how does ROV Cable manufacturing work?
Discover all about ROV Cable manufacturing, requirements, the latest trends and make your subsea project a success!
To help you select the perfect ROV cable, please download our Ultimate Guide here or scan the herein QR code.

Connect with us : deregtcables.com / LinkedIn
SERVICES


| 15 FILM-OCEAN
of Film Ocean
REDEFINES OFFSHORE OPERATIONS WITH INNOVATIVE REMOTE ROV SUPPORT
Courtesy
Film-Ocean, a leading provider of advanced subsea ROV services, with its remote technology partner HonuWorx, has developed and implemented a remote ROV services package. Our common goal was to revolutionise the offshore energy sector through enhanced remote support services. This collaboration combines high-tech satellite communications and remote operations to ensure uninterrupted offshore operations and rapid response to issues.
Our remote ROV support services, available globally, can function independently of the existing offshore asset communications. Leveraging the HonuWorx cloud-edge platform, Film-Ocean offers clients a reliable remote operations support service independent of an asset's existing IT infrastructure. Film-Ocean’s remote ROV support service will maximise the efficiency of our project operations' efficiency by bringing a new level of communication to offshore projects.
Our new remote ROV support service enables clients to have access to the ROV operations in real-time, with engineers and technical experts at their fingertips. Engineers can dial in from their phones, and Project Managers can log in to check the status of operations, set up access controls for inspection software and video, and interface with the offshore team. Communication is quicker, and if required, can be watched live and speak directly with the offshore team.

Scott Jenney, CEO, Film-Ocean, reported: "We're bringing a level of versatility unseen before in the sector. We have deployed this service on a number of our legacy projects over the last 2 years on locations that previously, we did not even have had direct phone connection with the offshore team in the ROV Control Container. Our newly constructed headquarters in Ellon has been designed with significant levels of redundancy in terms of power and data connectivity to ensure that we can provide our clients an uninterrupted service; ultimately, if there's sufficient bandwidth, our services can be deployed from any location. The service is highly adaptable and requires no specialist hardware for our clients to interact with the operations offshore."
Offshore energy sector clients reap significant benefits from this approach. The need for bed space is drastically reduced as only the ROV offshore team requires accommodation. The rest of the support team can operate effectively from onshore, leading to increased efficiency and substantial cost savings.
The ability to access experienced technical experts who offer real-time video streaming of offshore operations is a game-changer for clients. Not only can they observe and offer solutions remotely, but video conferences also allow attendees to view offshore operations from the team's perspective.

16 | FILM-OCEAN REDEFINES OFFSHORE OPERATIONS WITH INNOVATIVE REMOTE ROV SUPPORT SERVICES
Courtesy of Film Ocean
Film-Ocean's remote support service can facilitate quicker response times and provide immediate access to expertise, reducing the likelihood of offshore teams deviating from tasks and ensuring that any issues are addressed efficiently.
Film-Ocean recently facilitated a UK North Sea project to showcase this service's effectiveness. When an emergency Medivac situation left the offshore team shortstaffed, the company quickly activated its remote support and continued the inspection scope while replacement personnel were mobilised. The project was completed without further interruptions.
"The remote ROV support services prove beneficial in overcoming challenges such as limited flight seat availability and Medi-vac situations. We can continue operations without physical presence, ensuring no job is hindered," states George Gair, Inspection Manager at Film-Ocean.
The remote operations support service strengthens the collaborative relationship between Film-Ocean and its clients. Clients can access ROV operations in real-time, with engineers and technical expertise just a mouse click away. Communication is quicker, resources are optimised, and clients can assign personnel to various tasks while reducing physical presence needs. By removing the inspector from the offshore environment, remote inspections can support
or manage the offshore operations from a dedicated onshore control room in any global location that has suitable onshore bandwidth, rather than having to place inspectors offshore.
"A project spanning 30 days and four blocks may not require the full team on the platform throughout the entire duration. The scalability of the HonuWorx cloud platform allows us to deploy highly experienced individuals as and when required," explains George Gair, Inspection Manager, Film-Ocean.
Other examples highlight the benefit of direct sharing of footage in conjunction with direct communications to the offshore team, meaning that the client’s asset integrity, maintenance and ops personnel can see issues encountered and request specific interventions and investigations in real time.
From a personnel development perspective, Film-Ocean aims to continuously enhance the skills of its offshore crew through remote services, highlighting more efficient and cost-effective methods of conducting ROV operations.
To discuss your remote operation requirements and for more information about Film-Ocean's new remote support services, don't hesitate to get in touch at www.film-ocean.com/contact
Micron Gemini Find what you are looking for Multibeam imaging sonar Depth & pressure readings Optional AHRS
THE DRONE REVOLUTION IN THE DEEP
Hydrus Micro-AUV
Hydrus is the drone revolution of the underwater world, with the most advanced navigation and communication systems of any subsea vehicle. It contains a DVL, USBL, INS, acoustic and optical modem, all tightly integrated. This enables highly reliable, fully autonomous underwater missions at your fingertips.


Hydrus produces stunning imagery, even in challenging low light and turbid conditions. It also provides obstacle detection and collision avoidance.
Its small size and weight mean it can be carried and launched by a single person, and can even travel with you on a plane.
Scan the QR code or visit www.advancednavigation.com
9 km Range 3 km Depth 4K @ 60 fps Camera Up to 3 hrs Endurance Hydrus
GREENSEA IQ SET TO TRANSFORM THE WORLD OF OCEAN ROBOTICS
GREENSEA

I founded Greensea in 2006 and we began commercializing in 2017. Over that period, we developed, established, and marketed a very comprehensive software framework for ocean robotics. In the last few years, Greensea has become exceptionally capable, featuring navigation, autonomy, and over-the-horizon supervision of ocean robots. We really responded to a vision of where the industry could go: doing more with ocean robotics, and expanding our reach as humans further into the world's oceans. This means our work can be persistent and forward reaching, while also being more efficient, safe, and productive.

I think this growth has really been propelled through the concept of autonomy, and in particular intervention autonomy: the technologies that allow robots to do meaningful work underwater with diminished input. We still require some level of supervision. However, I think in most use cases that our future has for ocean robotics, the economics are just not viable to do things in the same way as before. Sending ships full of crew offshore and running ROVs is just not viable. It’s expensive and it’s not scalable.

| 19
Ben Kinnaman, Founder & CEO, Greensea IQ
Courtesy of Greensea IQ
Courtesy of Greensea IQ
Ocean Robotics Planet caught up with Ben Kinnaman, Founder & CEO of Greensea IQ, following the merger of Greensea Systems, Bayonet Ocean Vehicles and Armach Robotics. Discover the reasons behind the merger, and how Greensea IQ will reshape ocean robotics.
Greensea began responding to this vision of where the industry could go about five years ago. In the process, we developed a highly comprehensive and capable autonomy, and over-the-horizon supervision technologies. We’ve been quite successful in fielding those in several different segments of the market.
ARMACH
We started Armach Robotics in 2021 to commercialize a technology that Greensea had developed based on our hull navigation technology. Greensea developed this very capable and accurate navigation technology for small robots specifically working attached onto the hull of a ship.
We founded Armach Robotics, because with that technology we had the potential to completely revolutionize ship husbandry. Focusing on a concept of proactive cleaning instead of cleaning ships when they got dirty, we had the ability to maintain the ships so they didn’t get dirty or biofoul.
This concept is certainly not novel; it’s about as “revolutionary” as brushing your teeth every night. However, the concept of maintaining a clean ship is completely prohibitive with conventional ship husbandry methods. Large robots or diver systems are just too expensive to do regularly. But with the navigation and autonomous technologies of Greensea, we have the potential to develop small and lightweight robots that could work almost continuously on a ship hull. Armach Robotics was started to commercialize that concept.
We originally went to market with a subscription-based model for ship owners; they could pay a flat monthly rate to keep their vessels clean. In return, our initial customers started seeing dramatic fuel savings of between 8-15%, and this led to incredible savings overall.
I think one of the more compelling values of this concept is carbon reduction. Keeping ships clean is perhaps one of the easiest ways to remove the most carbon from the Earth’s atmosphere. If we clean these ships, then we have the potential to put a dent in the carbon load in the atmosphere.
BAYONET
Then in 2022 came Bayonet Ocean Vehicles. We founded Bayonet to commercialize an autonomous seafloor crawling robot. These were the only viable amphibious seafloor robots in the industry that – when paired with Greensea’s autonomy and over-the-horizon communications – could open an entirely new realm of ocean exploration.

They also essentially open a new market, as we can work in the surf zone, the littorals, and the amphibious regions autonomously. This is compelling because it opens up a big defense mission set, while enabling us to monitor the world’s oceans, as we try to combat climate change and rising sea levels.
Furthermore, we can do this in the part of the ocean that affects us most: the point where it reaches the land. There are no other autonomous systems that can work effectively in that zone: very shallow water, surf zone, estuaries, etc. We founded Bayonet Ocean Vehicles in 2022 to commercialize these robots.


THE MERGER: GREENSEA IQ
Fast forward to late last year; like most CEOs I crawl into a dark little cave at the end of my fiscal year, and I check my scoreboard to see how we've performed. Like most years we’ve done quite well; we doubled both Armach and Bayonet, and Greensea grew by 50% or more. So objectively, it’s quite good. But I started looking into the next year and making plans for what we were going to do, and I asked myself some
20 | TITLE EXTENDING HUMAN REACH IN THE OCEANS: THE GREENSEA IQ APPROACH
Courtesy of Greensea IQ
Courtesy of Greensea IQ
questions. Am I doing the best I could? Are we meeting our full potential? Are we doing everything possible with the resources we have?
I came to a conclusion: we have this 17-year-old software company that is the world leader in software for ocean robotics; that has also opened up new capabilities in mine countermeasures and unexploded ordnance disposal. We have this other company that is opening up new capabilities with ship husbandry and autonomous robots. We have this third company that’s opening up new areas of the market with seafloor crawling robots. It just seemed to me that when we put all those things together we could be more than just a software company, a robot company, and a ship cleaning company. The concept of Greensea IQ is to create a higher impact organization. We’ve merged all three companies – Armach, Greensea, and Bayonet – into a singular entity with greater combined potential than the three individual organizations alone.



When I talk about having a greater impact, I mean tackling five key areas where we can enact the greatest change with the application of our technologies:
DEFENSE
The first is in our traditional defense markets. Greensea has had a mission to help governments and defense organizations to get the human out of the minefield. As we grapple with sea mines, mine countermeasures, and explosive ordnance in the world’s oceans, that dynamic hasn’t really changed since World War II; we still put divers in the water.
Of course we use advanced robots and autonomous systems to survey the ocean and see if there are mines. But that’s still followed by clearance divers being deployed to remove them. Greensea pioneered some autonomous technology for ROVs that allows us to skip this last step.
We also enabled a technology that has been crucial for assisting special operations combat swimmers. These are navigation kits to enable them to transit very accurately underwater, and return home safely. This is a really noble thing to pursue. Greensea IQ is going to focus on this, and apply our technology and robots to further that mission.
RENEWABLES
For the second area, we are going to focus on renewables as we look towards the ocean for safe and sustainable energy. We can’t really move until we figure out a new paradigm for maintenance and construction services, because the entire infrastructure we’ve relied upon for decades in offshore oil and gas isn’t going to work for renewables.
Just look at the economics: we can’t send offshore supply vessels out to the wind farms at a quarter of a million dollars a day and effectively service those installations. The way to make the economics work is through autonomy. If we can minimize the number of people on the wind farms with autonomous vessels and resident subsea vehicles, then the
| 21
Courtesy of Greensea IQ
Courtesy of Greensea IQ
metrics become viable, and we can really start realizing the potential for offshore renewables. Greensea IQ has all of the technology to make that a reality.
UNEXPLODED ORDNANCE
The third area to generate impact is in unexploded ordnance (UXO). When I first got into this industry 25 years ago this is what I was working on. I grew up at the outer banks of North Carolina where we have all of this war trash just sitting around. Our water ways, shallow waters, littorals, beaches: they’re all littered with the detritus of conflict. But it’s hard to clean it up because, again, the economics don’t work.
It’s also really unsafe, but again this is where autonomy becomes essential. We can survey and mitigate vast areas of the ocean in the surf zone and remediate UXO, especially with our Bayonet robots. With Greensea and the Bayonet robots earlier this year we successfully searched for, and located, some lost munitions in two foot overhead breaking surf off the coast of California. I don’t think there’s any other robot in the world that could have performed that mission. We surveyed a huge area of 30 square kilometers and located a lost munition. That provided invaluable data that we can then use on future missions. This third major business focus of Greensea IQ will be in the worldwide search and mitigation of UXO, which our fantastic robots will help enable.
SCIENCE
The fourth major area we will focus on is science. Greensea has been involved in the science community since day one. Since 2006 we’ve provided software to many different scientific organizations and deep ocean vehicles worldwide. By using OPENSEA (Greensea’s open architecture software platform), and extending it to the science community, we can create an open architecture platform for all scientific collaborations around the globe. They can use our platform as leverage, and realize a scale of economy and effectiveness that they just wouldn’t be able to on their own.


This will allow us to tear down some of the barriers between our organizations and share technologies. It will also give us the opportunity to take all of this autonomy and communications technology that we’ve developed for the defense industry, and move it over to the “good” side: allowing the science community to use that technology to further understand climate change and its impact on the ocean.
TRANSPORTATION
The final area that we want to focus on with our business is the transformation of the maritime transportation sector. Maybe that will be my opus. With any luck that’s what I will be remembered for.
There’s no single thing that we can do to impact the climate and the environment in a better way than simply keeping ships clean. As previously stated, maritime transportation accounts for 5% of the carbon load in the atmosphere. By
keeping ships clean we can realize 15-20% of fuel savings. So by the reduction of fossil fuels in maritime transportation, we can reduce carbon emissions by a dramatic amount.
Furthermore, it means that we can mitigate the transport of invasive species, minimize the use of toxins on ship hulls to control biofouling, minimize costs related to maintenance, and improve the efficiency of ships in the ocean. All of this is just by keeping ships clean. Just remarkable! So the fifth area that Greensea IQ will be committed to, is maritime transportation, and the control and management of biofouling using autonomous vehicles.
THE GRAND UNVEILING
My goal with Greensea IQ is to take these three very successful companies; a company that builds software, a company that builds robots, and a company that cleans ships, and create a single higher impact organization that will do a whole lot of good in the world.
We completed the corporate formation and merger of Greensea IQ with an announcement on September 1st. DSEI, the exhibition for defense and safety equipment, 12 – 15 September in London, will be the first exhibition that we will be attending as Greensea IQ, where we effectively draw back the curtains on our new company, and introduce it to the industry.

22 |
EXTENDING HUMAN REACH IN THE OCEANS: THE GREENSEA IQ APPROACH
Courtesy of Greensea IQ




Meet , the future unveiled
Introducing KD300E, our new electric thruster
Introducing ZEEROV (Zero Emission Electric Remotely Operated Vehicle) - the latest work-class ROV from Kystdesign. Designed to push the boundaries of subsea exploration, ZEEROV delivers a new level of performance, versatility, and sustainability. With its advanced electric propulsion system KD300E, ZEEROV is a zero-emission vehicle that offers a more environmentally friendly alternative to traditional ROV´s.

NEW!
kystdesign.no
made this!
HOW BLUEYE DEVELOPS ROV TECHNOLOGY THE HARDWARE, THE SOFTWARE, AND THE CORE VALUES OF USER FRIENDLINESS
By Oda Ryggen, CCO, Blueye Robotics
PROVIDING EASY ACCESS TO THE OCEAN – FOR EVERYONE
Blueye Robotics is a Norwegian underwater tech company established in 2015. Our roots are from the Norwegian University of Science and Technology (NTNU) and SINTEF Ocean. Today we are 18 full-time employees specializing in industrial design, electronics, software, robotics, business development, and marketing.
Initially developed for a consumer market, our founding principles have been applied to the commercial market, providing professionals with robust and user-friendly tools.
THE BASIC SYSTEM –HOW IT'S ALL CONNECTED
Before getting into the nitty-gritty of the Blueye design, it's necessary to get an overview of what the ROV system consists of and how it works.
The system is comprised of the ROV, a tether connected to the surface, and a control device running the Blueye App. The Blueye App provides a stable connection to the live camera feed the ROV controls, and sensor data collected during the dive.

| 25
Courtesy of Blueye Robotics
The Blueye system may seem like that of other underwater ROVs, with hardware and software working together, but there are crucial differences that we will explore now.
"FEET DOWN, HEAD UP AND EYES FORWARD" – EXPLAINING THE ROV DESIGN CHOICES

The three Blueye ROV models, Pioneer, Pro, and X3, all have the same form factor and are built on the same design principles. The Pioneer was the first model launched back in 2019, but years of R&D were completed before it was handed to our first clients.
The shape of the Blueye ROVs is a-typical for ROVs. Usually, ROV systems are box-shaped or more oval or round. The Blueye ROV resembles more of a large fish, and there are some major design choices behind that.

HYDRODYNAMIC AND SELF-STABILIZING
The camera of the Blueye ROV is located at the top, and the heavier parts, such as the aluminum battery tube, are located at the bottom. Our technology works like the human body –our heads are on top, our eyes are looking forward, and our feet are on the ground.
The ROV has four thrusters, two carefully placed in the center and the other two at the back, keeping a significant separation between the center of buoyancy (COB) and the center of gravity (COG). A decision to keep the cost down led us to stay with four thrusters, and being very exact on the placement of these, we ended up with a self-stabilizing ROV design without the need for "pitch and roll" functions.
"It's a lot easier for the operator to relate to the environment around the ROV when you know the camera and the ROV is always in an upright position." – Rune Hansen, Lead Mechanical Engineer at Blueye Robotics
Another small but significant detail about the design are the "fins" located on both sides of the ROV. Without these "fins", maneuvering the ROV upwards and downwards in the water column had the ROV "wobbling" from side to side. After several iterations to find the correct shape and angle, adding these "fins" to the ROV compensated for this unwanted effect, letting the ROV thrust up and down to the seafloor in a straight line.
Another detail to mention is the choice to have removable batteries for minimal downtime. It enables the use of a thin and flexible tether which minimizes the drag from the water while diving. The connector point for the tether inside the ROV is not a coincidence either, as it's carefully planned for and placed in the center, and not at the back of the ROV, also to reduce the drag while diving.
THE BLUEYE SMART CONNECTOR –CONVERTING ADVANCED SENSORS TO PLUG-AND-PLAY SYSTEMS
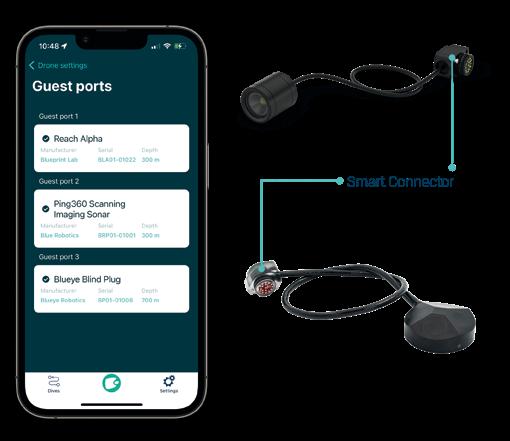
Integrating 3rd party technology and tools into our platform is enabled via a Blueye Smart Connector. There is no need to download drivers, update the ROV, or to send the ROV back to the factory to simply add an accessory. Just like your computer detects and operates USB connected devices, the Blueye ROV automatically knows what is connected because the Blueye Smart Connector houses a small circuit board, including metadata.
The metadata allows the Blueye ROV operating system (Blunux) to start the software modules needed to support a particular peripheral based on the connector information without any configuration required by the end user. On other systems, ROV operators would typically have to configure COM ports manually, set static IP addresses, and install system drivers to enable a new third-party peripheral.
26 | HOW BLUEYE DEVELOPS ROV TECHNOLOGY
"It's all about making advanced tech easy to use and removing the manual configurations that complicate the setup." Jonas Follesø, Chief Technology Officer at Blueye Robotics
Righting moment = BG* sin(θ) * Buoyancy force (Courtesy of Blueye Robotics) Courtesy of Blueye Robotics
THE GAMMA RAY "SNIFFER" AND OCULUS MULTIBEAM SONARS
We recently delivered a Blueye X3 model integrated with a Medusa Gamma Ray detector to the International Atomic Energy Agency (IAEA). The IAEA is tasked with measuring the levels of radioactivity spilled from the X-press Peal ship that took fire and sank in Indonesia in 2021.
Integrating the Medusa sensor into the Blueye X3 enables the IAEA team to read radiation levels directly in the Blueye App while diving. There is no need for external software as the readings are easily recorded with the Blueye App.
APP-SOFTWARE AND OFF-THE-SHELF, WELL-ESTABLISHED TECHNOLOGY
The Blueye App connects the ROV, Surface Unit, and Controller together so the operator can pilot the ROV. Inspired by aerial drones, it was clear from the start that the Blueye ROV should be operated in the same simple and proven manner.

"It's not just the flexibility of the app technology that led us down this path. It's equally important that the mental image the first-time-user develops in her mind is that this piece of equipment looks familiar and easy to handle." –
Jonas Follesø, Chief Technology Officer at Blueye Robotics
Another benefit of integrating apps is being part of a large ecosystem of apps. Integrating our apps with 3-party apps is easier, and the data flows much smoother. When COVID-19 closed down the world, we connected to Microsoft Teams in a few days – enabling remote inspections and digital demonstrations for clients.
THE XBOX CONTROLLER
Even though we do want users of the Blueye to recognize the tech instantly, we're typically also confronted with comments that the system looks like "a toy".
The Norwegian Coast Guard decided to equip their whole fleet of vessels with the Blueye X3 during the fall of 2022. Since receiving the ROVs, the Coast Guard has reported several successful search and recovery missions. The primary sensor for this delivery was the Oculus M750d multibeam sonar.

"These underwater ROVs can dive to greater depths than the Coast Guard's own divers and can reach longer distances faster. This expands the Coast Guard's operational radius and increases efficiency in the execution of the Coast Guard's many tasks." – Torill Herland, Commanding Captain and Communications Officer, Royal Norwegian Navy.
The standard controller offered with the system is an Xbox controller. We could have developed our own controller, but that would have made the system more expensive and less flexible for the user. If the controller gets broken, it's easy to buy a new one at the local electrical shop. The same applies to the devices running the Blueye App – you can choose your smart device of choice and upgrade whenever you want. Also, reflecting on the amount of R&D hours that have already been put into off-theshelf gaming controllers, we decided that it's not worth customizing something that is already very applicable to our system. If it's good enough for the millions of gamers out there already being very picky about their gear, it's good enough for Blueye.
| 27
Blueye X3 with rugged controller and Medusa Gamma Ray detector (Photo courtesy of Blueye Robotics)
The Norwegian Coast Guard on a mission at Svalbard. (Photo courtesy of Norwegian Coast Guard)
A multifunctional heat transfer and hydraulic fluid for marine electric vehicles, created by Engineered Fluids.

This revolutionary fluid meets the requirements needed in ROVs for pressure compensation, electrical insulation, thermal management, and hydraulic power transfer. Achieve higher operational performance while eliminating the health and environmental issues posed by traditional fluids used today.

Manufacturing custom-machined components for ROV and associated applications. Any quantity of components at a competitive cost.


VEHICLE FRAMES, COMPENSATORS, HOUSINGS, ACRYLIC COVERS, BUMPERS, UMBILICAL GUIDES AND MUCH MORE…




Our components can operate in extreme conditions and offer high levels of reliability. Fast efficient response to quotes, and a high level of customer service. Our level of expertise in this field is a benefit to our customer base.


www.becplastics.co.uk enquiries@becplastics.co.uk +44 1236 781255
THE PLASTICS EXPERTS IN PRECISION MACHINING Synthetic • Biodegradable • Safe • Effective SubmergeDeep™
Introducing SubmergeDeep™ www.engineeredfluids.com Engineered Fluids Inc., St. Petersburg, FL, USA
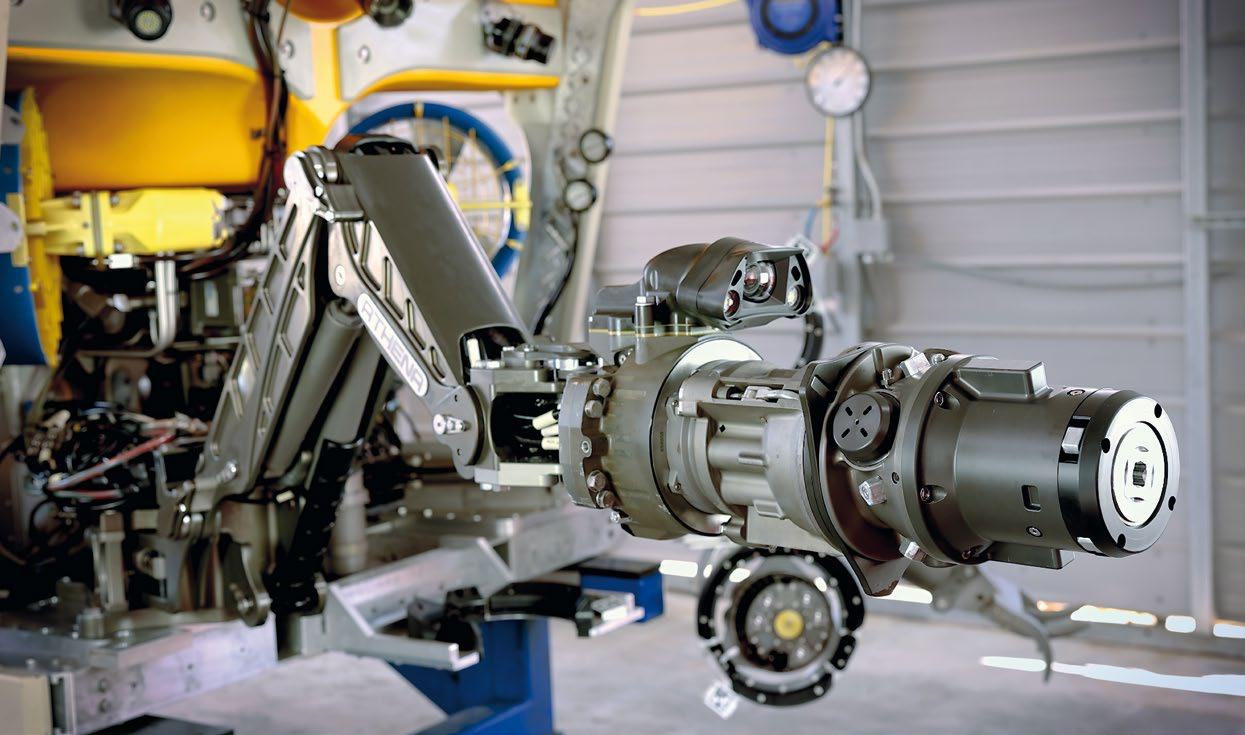
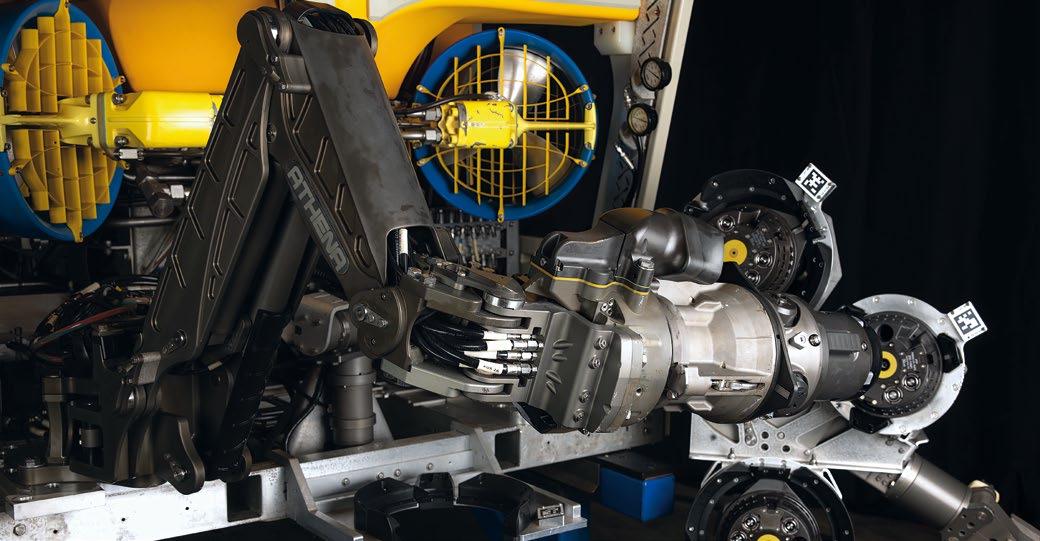
ATHENA™
UNLOCKING FASTER RESPONSE TIME, EVERY TIME, FOR REMOTE UNDERWATER WORK
As subsea exploration, construction, and intervention demand increases and complexity grows, it is critical that products and systems evolve to meet the remote underwater work needs of the industry. TechnipFMC, with the experience of its Schilling Robotics division, continues to help clients address the challenges through industryleading technologies and services, including the new Athena™ tooling interchange system.
| 29
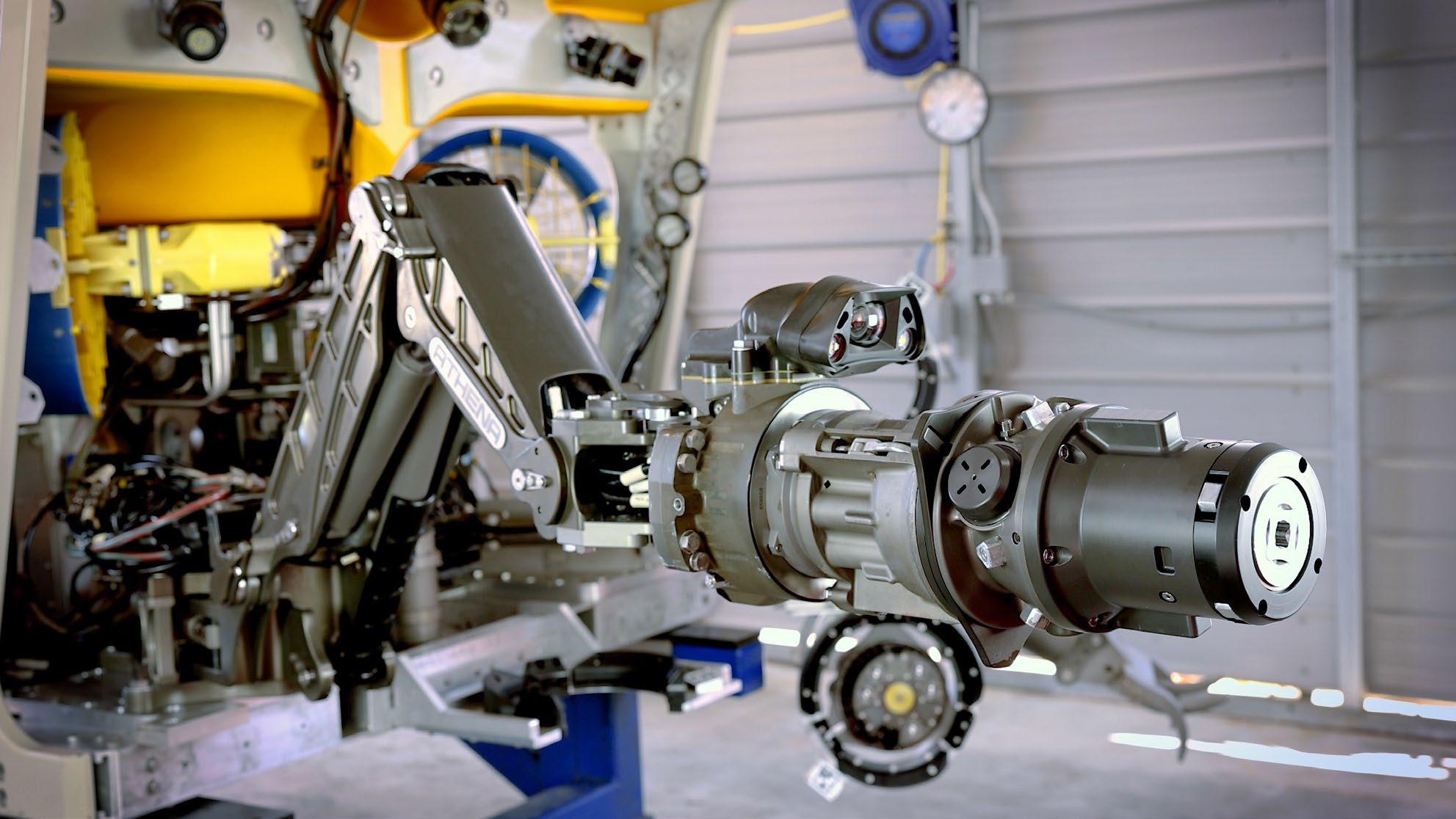
The Athena™ tool exchange interface wrist transfers power, communications, and control fluid to attached tools (Courtesy of TechnipFMC)
TechnipFMC's first subsea tool exchange solution, the GEMINI® ROV system, was developed because the Schilling Robotics team recognized the importance of a reliable system that could easily access tools for subsea intervention operations without returning to the surface. The adaptability of the system keeps projects online, reduces operational risk, and cuts downtime.
Athena™ is TechnipFMC’s latest evolution in subsea interchangeable tooling and controls, bringing this same adaptability to the current generation of ROVs. The Athena™ tooling interchange system is based on the field-proven TechnipFMC Atlas™ manipulator, providing consistent and reliable results during subsea operations. It can be installed as an upgrade to an existing Atlas™ manipulator or retrofitted to existing vehicles. It’s suited to work with today’s highest-performing vehicles under the most demanding conditions.
Schilling Robotics has continually enhanced and introduced new robotics technology to benefit its clients and the subsea industry for nearly 40 years. TechnipFMC’s Schilling Robotics
KEY ATHENA™ FEATURES AND REQUIREMENTS
ƀ Standard depth rating of 5,000 msw
ƀ Standard tooling interface for hydraulics, optical communications, and inductive power
ƀ 3,000–5,000 psi aux oil circuit
ƀ 3,000–5,000 psi aux water glycol circuit
ƀ High degree of field serviceability
ƀ Plug-and-play topside configuration
ƀ Semi-automated exchange controls
ƀ Specially designed tool holders with locking mechanisms
ƀ “No drop” tool locking mechanism
team understands the challenges faced by service providers, specifically with the inefficiency of interfacing and utilizing traditional tooling. Athena™ is the purpose-built technical solution that will improve productivity, reliability, and consistency in operations.
The tool exchange wrist transfers power, communications, and control fluids to attached tools, and is designed to reduce forces and binding during subsea tasks. With no need to return to deck to reconfigure tooling, operations are continuous – maximizing operational efficiency and productivity.
The tooling interface allows for zero-leak subsea tool exchange, ensures tools are appropriately positioned, and prevents them from being dropped. The tools are integrated onto the ROV porch tool holder, the adjacent manipulator, or the non-ROV skid – outperforming current solutions and allowing operators to work more efficiently subsea.

30 | ATHENA™, UNLOCKING FASTER RESPONSE TIME, EVERY TIME, FOR REMOTE UNDERWATER WORK
The Athena wrist engaging with the tool holder, stowing additional tooling options to perform a variety of subsea operations (Courtesy of TechnipFMC)
Athena uses force compliance and fiducial markers located on the tool holders to positively latch and lock onto the tool being selected (Courtesy of TechnipFMC)
Semi-automated tool exchanges are achieved with an integrated machine vision camera (MVC) and uniquely identified fiducial markers that enable the intelligent controls to track position and provide real-time guidance to the user.

Standard and large tool holders have been built to mount onto Atlas™ or Rigmaster manipulators. These conveniently store various tools needed for subsea tasks so they can be exchanged subsea. Each tool holder has three guides, ensuring the tooling exchange wrist is appropriately positioned to latch and lock onto the tool.
The topside equipment is integrated into the control van via ethernet connection, miniPC, and a decoder connected to HUD. Athena™ can be controlled through the topside controller or game controller, allowing the user to operate the system, wrist camera, and tooling. The optimized performance of Athena™ simplifies repetitive tasks, removing complexity and risk.
The topside controller features a pendant arm to control the position of the system and a touchscreen to control the system hydraulic isolation valve, camera lights, tool functions, and wrist latches. The touchscreen can also be used as the primary GUI.
The game controller has tactile buttons to control system functions. Assisted and semi-automated controls, in addition to the force compliance of the wrist, help operators perform tasks quickly and more consistently across all operation skill levels.
TechnipFMC’s Schilling Robotics has built a legacy of designing and delivering products to perform the subsea work that keeps the subsea industry productive, while delivering the expertise and scale to make way for new subsea

discoveries. Athena™ is the latest technology development that will enhance the performance of today’s operations, while supporting the future of remote and autonomous operations. Athena’s™ intelligent control system is the foundation for the future of subsea operations, enabling clients to work more efficiently and with less risk, whether traditionally or through remote and autonomous operations.
THE FOLLOWING OPTIONS AND ACCESSORIES ARE AVAILABLE FOR THE ATHENA™ SYSTEM:
ƀ Mounting plate with kit
ƀ Parallel jaw
ƀ 3 finger jaw
ƀ 4 finger jaw
ƀ Class 3-4 torque tool
ƀ Class 1-2 torque tool
ƀ Hot stab, seal test, 15K
ƀ High pressure water jet
ƀ Dual port hot stab
ƀ 2” Softline cutter
ƀ Universal tooling adaptor puck
ƀ Tool holders
ƀ Atlas™ upgrade kit
| 31
Athena can be installed as an upgrade to an existing Atlas™ manipulator, with the tools integrated on the adjacent manipulator (Courtesy of TechnipFMC)
A detailed view of the jaws tool, one of many tooling options available on the tool holder (Courtesy of TechnipFMC)
Please check out our website on: www.oceanroboticsplanet.com
Schilling Robotics’ dual-port hot stab, one of many subsea interchangeable tools available on Athena tooling interchange system. (Courtesy of TechnipFMC)



Specialised Personnel, Services, and More: What can the Oceanscan Group do for you? Orbis Centre, Wilde Street, Lowestoft NR32 1XH oceanscan.co.uk | personnel@oceanscan.co.uk | +44 (0)1502 509247 Unit 3, Axis Business Centre, Inverurie, Aberdeenshire, AB51 5TB hpruk.com | mail@hpruk.com | +44 (0)1224 838800 • Survey • ROV, trenching and plough • Inspection • Diving • Offshore management • Cable/flexi/rigid lay and SURF • Rigging and lifting • HSE Oceanscan personnel division provide competent and compliant personnel to the offshore energy sector on a global scale.
A NEXT GENERATION SEABED CORING SOLUTION
Al Rumson, Technology Manager - Ocean Solutions at DeepOcean
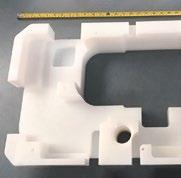
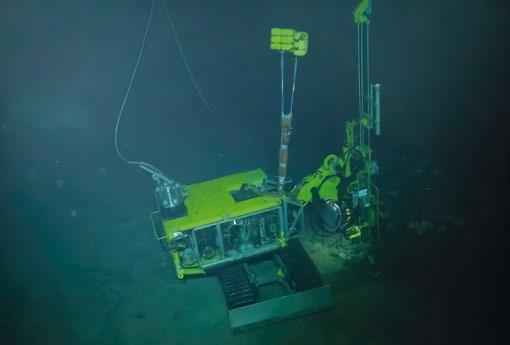
In addressing the subsea industry’s increasing requirements for geotechnical seabed sampling, a group of companies (DeepOcean, Seabed Solutions, and Adepth Minerals) are implementing a new coring methodology to significantly improve the efficacy of sampling and interpretation of subsurface seabed geology. This involves a marinised, off-the-shelf, and proven land-based coring system – referred to as ‘FlexiCore™’. This is mounted on to a subsea vehicle: the Seabed Excavator.
The FlexiCore technology will be able to obtain an increased number of high-quality cores in less time and with lower costs than conventional methods. The system has so far been used to retrieve seabed cores at water depths of over 1,000m. Our initial plans for commercial utilisation focus on seabed mining exploration campaigns and renewable energy developments.
SUBSEA GEOTECHNICAL SURVEY SOLUTIONS
Contemporary marine drilling operations fall into two major categories: ship-based and seafloor based. Ship-based drilling
operations involve high operational costs and significant vessel requirements, limiting the pool of available platforms and requiring resource-intensive operations. Seafloor-based core drilling systems can be subdivided into stand-alone robotic seafloor systems or ROV based systems. Options for the latter currently suffer from slow drilling rates and poor penetration. Robotic drills are fully automated but typically require a level seafloor, intricate robotic systems, and surface vessel repositioning between each drill site. This is the case even for closely spaced stations or re-attempts on site.

| 35
FlexiCore (Courtesy of Adepth Minerals)
Further challenges associated with these methods are that they cannot collect samples at sufficient depths (especially for seabed mining operations) and are not flexible enough to take samples from both unconsolidated loose sediments (typically using coring equipment based on weight/piston) and hard rocks or solid consolidated deposits (using rotary drilling equipment with core bits). They’re also unable to concurrently collect geophysical and drilling plume information.
Equipment that can drill to the desired depths and make the large numbers of boreholes required by clients are currently based on drilling vessels/platforms. These methods can prove too expensive for some applications, such as marine mineral exploration. Alternatively, seabed drilling towers provide all the drilling equipment to the seabed but are inflexible; they have less mobility; must be resting on a near-horizontal seabed to drill; and must be fully automated. This can result in frequent mechanical issues requiring the recovery of all equipment to the support vessel.
THE FLEXICORE SYSTEM
FlexiCore combines a marinised land-based coring system (in which certain equipment components have been replaced), mounted on an existing subsea crawling vehicle. The key subsea coring challenges which FlexiCore is designed to tackle are:

ƀ Coring in variable substrate, including sediment and rock
ƀ Core drilling in varied lithology
ƀ Operation in sloped terrain, and at various core drilling angles to the seafloor
ƀ Being deployable from an industry-standard offshore support (subsea) vessel or scientific research ship
ƀ Being capable of changing drilling bits at the seabed
ƀ Quick transition from one coring site to another, even in sloped terrain, without the need for system recovery
ƀ Recovery of more than 30m of core per day from multiple field sites
ƀ Recovery of over 50% of the core material (with the goal of over 95%)
ƀ Being able to drill to a depth of more than 200m below the seabed
ƀ Potential use in multi-day core drilling operations for site geophysical and environmental characterisation
ƀ Additionally, the FlexiCore support setup should allow concurrent collection of geophysical data and monitoring of any drilling plume
The FlexiCore system is designed to meet these operational criteria through the innovative application of established offshore and onshore technology. FlexiCore is mounted on the Seabed Excavator, which is based on a Perry Slingsby XLX ROV system that was built in 2009 and has been used for various special salvage projects worldwide. It has achieved a maximum dive depth of 3,200m, and holds a record for continuous working time up to seven days. FlexiCore is rated to 4,000m depth, and is deployable from any ROV-capable subsea vessel with sufficient crane capacity.
Moreover, the Seabed Excavator is proven to operate in up to 30° slope, in variable terrain, and is coupled with a bespoke marinised and modified Epiroc drilling system. This is capable of drilling at any angle to allow operation in challenging terrain and drilling angle environments.
The FlexiCore system can be operated in conjunction with a conventional work-class ROV, providing a theoretically limitless supply of coring components. This also enables retrieval of cored material to the support vessel for near real-time assessment and decision making.
The support ROV’s role facilitates the system’s operational responsiveness to variable lithology. It allows a wide range of in field-swappable drilling bits and core lifting systems to be rapidly exchanged on the seafloor. In line with this, several variations of drill bits are prepared in a subsea basket, allowing for quick swapping without the need to recover the FlexiCore system. Additionally, using an ROV to recover core samples to a vessel without interrupting drilling operations, enables continuous drilling, and variations to coring operation on-thefly as a result of ongoing assessment of the ore body collected.
One in-house innovation which enables the system to work more effectively in harsh offshore conditions, is the development of a high-power hot stab. This allows the FlexiCore umbilical to be disconnected or reconnected on the seabed and can increase the weather window for operation: up to 4.5m SWH. Use of the hot stab enables coring operations to be paused and resumed without recovery and re-deployment of the FlexiCore system.
36 | A NEXT GENERATION SEABED CORING SOLUTION
FlexiCore (Courtesy of DeepOcean)
This combination of adaptable drilling angle, field-swappable drill bits, and detailed drill control (i.e., real-time user-controlled drilling speed, bit pressure, and water pressure) is intended to enable exceptional core recovery in variable lithologies, from soft sediment to highly resilient jasper.


MARINISATION AND INITIAL WET TESTING
Prior to deploying FlexiCore from a vessel offshore, system development, construction, and initial testing were completed. Initial trials involved an on-land test and an in-water (pier-side) test. The system was tested twice from a quay side. The second test involved a complete

Ridge Comparison 2, 3, 4.5m HS PERCENT AVAILABILITY January February March April May June July 10 YEAR MONTHLY AVERAGE Excavator Hot Stab Window Excavator Umbilical Window Excavator Launch Window August September October November December 100% 80% 60% 40% 20% 0% MR1 2m MR2 2m MR1 3m MR2 3m MR1 4.5m MR2 4.5m | 37
Mohns
FlexiCore pictured with DeepOcean's support ROV, during trials at the Mohns Ridge (Courtesy of DeepOcean)
Example Image of seabed cores the system will be used to collect. (Courtesy of Adepth Minerals)
FlexiCore, with hot stab umbilical connection visible (far left) (Courtesy of DeepOcean)
Example of weather working window limits, with and without the hot stab (Courtesy of Adepth Minerals)
Typical Drill Core Store Basket (Courtesy of Adepth Minerals)
system integration, in which an operational test including ROV deployment occurred. Successful completion of these trials indicated the system was fully qualified for its subsequent first operational deep-water deployment at the Mohns Ridge, a remote and challenging field environment.
As part of the initial trials, the FlexiCore system was extensively tested in progressively more complex testing scenarios. This culminated in a dry run field test with full mobilisation in a pier-side trial, including full operation of the integrated drilling system. This stepwise approach to system testing aims to minimise the risk of system failure by stressing all points of failure in a controlled environment. It has also provided opportunities to train both vehicle and ship operators in equipment operation prior to working in a remote field site.

During the in-water trials, a combined length of approximately 12m of seabed cores were recovered, with a recovery rate of up to 80%. The trials involved testing the operation of all system functionality, and full integration with an ROV in relation to logistics and handling of rods and cores between FlexiCore and the storage basket. The wet test was performed at 25m water depth, where the system drilled/ cored in various types of bedrock.
Throughout these trials several clients visited the test site and were able to monitor the wet tests and coring operations in real-time from the quayside. The trials also provided an opportunity to verify capabilities for changing drill bits subsea. The ability to drill, then stop and recover the drill bit to the ROV/basket, then swap for a new drill bit, before continuing to drill in same hole was successfully demonstrated.
OFFSHORE FIELD TRIALS

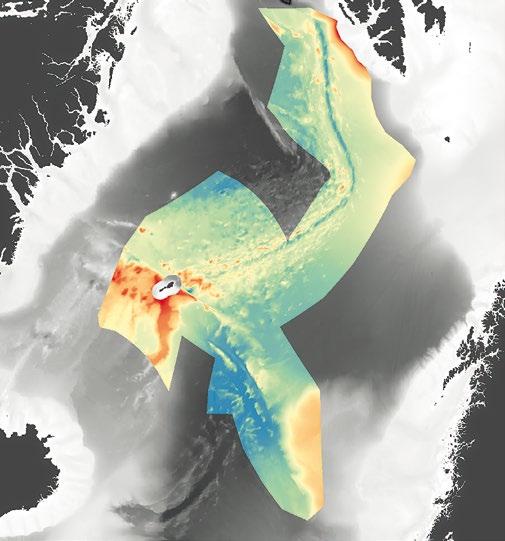
For its first deep water, offshore field trial, FlexiCore was tested within a research campaign led by the University of Bergen (UiB) Centre for Deep Sea Research, at the Mohns Ridge, in May 2023. This campaign, aboard DeepOcean’s vessel Dina Star aimed to map and further develop knowledge about the geology in the extended Mohns Ridge region of the Norwegian Continental Shelf (NCS). During this field deployment, the FlexiCore system was challenged to work in multiple lithologies with sites chosen by UiB.
At Mohns Ridge the FlexiCore system was tested in extreme conditions (in terms of depth, temperature, remoteness).
38 | A NEXT GENERATION SEABED CORING SOLUTION
FlexiCore system during wet test, deployed from a quay side (Courtesy of Seabed Solutions)
FlexiCore system during wet test, deployed from a quay side (Courtesy of Seabed Solutions)
Mohns Ridge Area coloured bathymetry), seen here positioned between landmasses of Norway Greenland and Iceland (Courtesy of Adepth Minerals)
Priceless experience was gained during the expedition, and this is now being used to improve the system’s capabilities. Resolving the system’s performance along the Mohns Ridge was a significant challenge; all previous drilling operations there have encountered substantial difficulties and achieved at best 20% core recovery of 20m or less of core.
The four main challenges posed during these field tests were the remoteness of the location, geologic complexity of the operation sites, integration of multiple data sources, and the variable down-bore lithology. Despite this FlexiCore achieved high recovery rates on sites where water depths exceeded 1,000m. Throughout the trials completed so far (during the research expedition and quay side testing), FlexiCore has been able to achieve drilling rates of 20m core per 24 hours. During drilling operations on the Mohns Ridge, we were also able to complete simultaneous operations (SIMOPS), enabling comprehensive environmental baseline data and seismic data to be acquired.
COMMERCIALISATION
Following the first operational deployment of FlexiCore, we are now preparing the system for deployment within commercial projects. We plan to utilise FlexiCore to enable

rapid classification and quantification of seabed geology, both for sustainable marine mineral exploration, and for sub-seabed investigations required for the installation of marine renewable energy systems.
The potential market for this system is wide. Core drilling, data acquisition, and detailed mapping are all considered important for offshore wind infrastructure, bridge foundations, evaluation of the ground over underwater tunnels, and general seabed related research. Therefore, FlexiCore is ideally suited to work scopes relating to inter-alia geotechnical assignments, site surveys, and anchoring of wind turbines or other installations.
The demand for a next generation seabed coring solution such as FlexiCore is well established; research institutions and industrial actors in Norway and elsewhere are demanding improved subsurface understanding, beyond what is possible using currently available technologies. In addressing this requirement, the consortium rolling out FlexiCore are looking to incorporate the system within a diversified exploration toolbox, SIMOPS solution, providing a suite of multigeophysics and environmental data collection tools.

World leading electric underwater robotics Saab Seaeye saabseaeye.com
EMPOWERING
FlexiCore utilised as part of an Exploration Toolbox (Courtesy of Adepth Minerals)


NORTH KOREA'S NEW UNDERWATER DRONE HAEIL
Kim Jong Un likes to unveil new 'superweapons' at its nighttime military parades. For several years this has been dominated by ever more fearsome ballistic missiles, including the submarine launched Pukguksong family. This year it was the turn of the drones. As well as copies of the American MQ-9 Reaper, there was an attention-grabbing underwater drone.

Underwater drones are only slowly starting to stir the public's emotions. What this one has going for it in that regard is that it is a) massive and b) possibly nuclear armed.
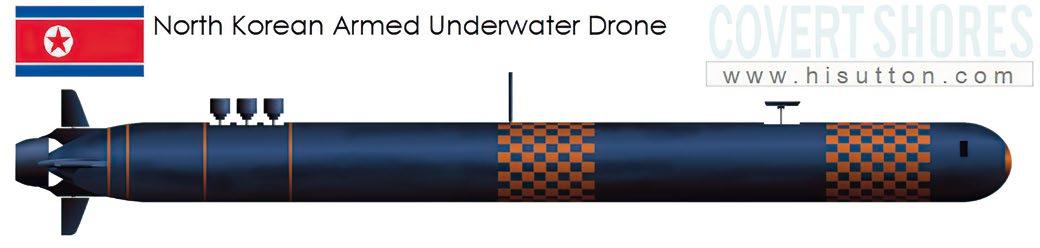
The drone is likely part of the 'Haeil' family although its designation is not reported. Four of the new drone-torpedoes were displayed.
The new 'Haeil' drone torpedo’s Specifications (provisional) are the following: Length: 16 meters, Diameter: 1.5-1.6 meters, Warhead: Conventional or nuclear, Propulsion: Diesel-electric (to be confirmed), Range: 1,000km (540 nautical miles) < reported in April 2023 for Haeil, Speed: 4.6 knots < reported in April 2023 for Haeil (likely much faster at terminal phase), and Depth: 80-100 meters < reported in April 2023 for Haeil.
The weapon (and I believe it is effectively a mega torpedo) is remarkably similar to Russia's Poseidon (KANYON). That Intercontinental Nuclear-Powered Nuclear-Armed Autonomous Torpedo is one of President Putin's super weapons. This new drone-torpedo is likely intended to be Kim Jong Un's close equivalent, at least in propaganda terms. And it is not far off.
The new drone-torpedo is larger and different from the 'Haeil-2' revealed in April this year. Possibly it is the improved production version. It is possible that performance details attributed to the Haeil-2 in April are actually for this larger weapon. For example, the range of 1,000km is much more credible for the larger vehicle.
| 41
H I Sutton, OSINT Analyst, Covert Shores
My initial estimate, based on the weapons' size relative to the truck and roadwheels, is that it is approximately 16 meters (52 feet) long. It is around 1.5-1.6 meters (4.9-5.2 feet) in diameter. This places it in the same ballpark as the Poseidon but still significantly shorter and likely slightly smaller in diameter.

Where the North Korean system will diverge from the Russian one is in propulsion. The Poseidon is nuclear powered, giving it incredible range. The North Korean one is electric, possibly with diesel engines (there appear to be three air filters over the propulsion space, possibly for snorkeling.
The new underwater vehicle is possibly the same one, or closely related, to an unidentified 'midget submarine' observed in Sinpo in 2020. The length matches although there were hints at a sail in the satellite images. If so, this suggests that the project has been underway for several years…


ABOUT H I SUTTON

H I Sutton writes about the secretive and under-reported submarines, seeking out unusual and interesting vessels and technologies involved in fighting beneath the waves. Submarines, capabilities, naval special forces underwater vehicles and the changing world of underwater warfare and seabed warfare. To do this he combines the latest Open-Source Intelligence (OSINT) with the traditional art and science of defense analysis. He occasionally writes non-fiction books on these topics and draws analysis-based illustrations to bring the subject to life. In addition, H I Sutton is a naval history buff and data geek. His personal website about these topics is Covert Shores.
WWW.HISUTTON.COM
42 | NORTH KOREA'S NEW UNDERWATER DRONE: HAEIL








“These underwater ROVs can dive to greater depths than the Coast Guard’s own divers and can reach longer distances faster. This expands the Coast Guard’s operational radius and increases efficiency in the execution of the Coast Guard’s many tasks.”
www.blueyerobotics.com
TRANSFORM YOUR CAPABILITY
REAL-TIME IMAGING IN ALL CONDITIONS

Oculus Multibeam Imaging Sonars


High resolution imaging in turbid water for improved situational awareness and target identification. Available in 375kHz to 3.0MHz. Depth rated to 500m, 1000m, or 4000m.
www.blueprintsubsea.com enquiries@blueprintsubsea.com

 — Torill Herland, Commanding captain and Communications Officer, Royal Norwegian Navy
— Torill Herland, Commanding captain and Communications Officer, Royal Norwegian Navy
THE U.S. NAVY’S “HYBRID FLEET” A CONCEPT OF OPERATIONS FOR ACHIEVING A NAVY FLEET OF 500 SHIPS
George Galdorisi, Director of Strategic Assessments and Technical Futures at
PERSPECTIVE
The Navy stands at the precipice of a monumental technological advancement. In an address at the 2022 “West” conference, the Chief of Naval Operations, Admiral Michael Gilday, revealed the Navy’s goal to reach 500 ships by adding approximately 150 large unmanned maritime vehicles to the Navy’s inventory. This plan added additional granularity to the Navy’s UNMANNED Campaign Framework and was eventually dubbed “The Hybrid Fleet.”
More recently, other speeches and interviews alluding to the number of unmanned surface vehicles the Navy intends to field culminated in the issuance of the Chief of Naval Operations NAVPLAN 2022, and Force Design 2045, both of which call for 350 manned ships and 150 large unmanned maritime vehicles. These documents provide the clearest indication yet of the Navy’s plans for a future fleet populated by large numbers of unmanned surface vehicles (USVs).
U.S.
Command and Control Center of Excellence
However, the U.S. Congress has been increasingly reluctant to authorize the Navy’s planned investment of billions of dollars on USVs until the Service can come up with a concept of operations (CONOPS) for using them. Fairly, Congress has a point. The Navy has announced plans to procure large numbers of unmanned systems—especially large and medium unmanned surface vehicles—but a CONOPS, one in even the most basic form, has not yet emerged.
While the Navy appears to be committed to buying large numbers of unmanned surface vehicles, it must come up with a convincing concept of operations for how they will be used during a conflict against a determined adversary. Unless or until the Navy can evolve such a CONOPS, it is unlikely that a 500-ship fleet populated by 150 unmanned surface vehicles will ever reach fruition.
| 45
the
Navy’s
The T38 Devil Ray (Courtesy of Jack Rowley)
U.S. NAVY “RAMP UPS” ITS COMMITMENT TO UNMANNED MARITIME VEHICLES

During the height of what has become known as the Reagan Defense Buildup in the mid-1980s, the U.S. Navy evolved a strategy to build a “600-ship Navy.” That effort resulted in a total number of Navy ships that reached 594 in 1987. That number has declined steadily during the past three-andone-half decades, and today the Navy has less than half the number of active, commissioned ships than it had then.
It is beyond the scope of this article to attempt to detail the reasons for this precipitous decline. Many—especially the U.S. Congress—have encouraged the Navy to increase
the number of ships it fields. Add to this such factors as the increasing cost to build ships, and especially the cost to man these vessels (Seventy percent of the total ownership costs of surface ships is the cost of personnel to operate these vessels over their lifecycle), and the fact that the Navy is literally wearing these ships out more rapidly than anticipated in order to meet the increasing demands of U.S. Combatant Commanders, and it is easy to see why the Navy has difficulty growing the number of manned surface vessels.
The rapid growth of the technologies that make unmanned surface vehicles increasingly capable and affordable has provided the Navy with a potential way to put more hulls in the water. To support these goals regarding large numbers of unmanned maritime platforms populating the U.S. Navy established an Unmanned Task Force to provide stewardship for Navy-wide efforts to accelerate efforts regarding unmanned systems. Task Force leader, Michael Stewart, described the focus of this effort: “With operational needs in mind, the task force uses a venture capital-like method to identify investments that could pay off: the process scans technology across the military and commercial markets; identifies which could be applied to warfighter challenges; hunts for potential barriers to implementation; picks technologies for further experimentation; and, in the end, selects a handful of items to receive small investments.”
From all indications, it seems that for the U.S. Navy, the intent is to go all-in on unmanned maritime vehicles and field a hybrid force of manned and unmanned systems. Importantly, the intent is to have these unmanned systems work in conjunction with manned platforms and achieve the goal of manned-unmanned teaming.

A CONCEPT OF OPERATIONS FOR GETTING UNMANNED SURFACE VESSELS TO THE FIGHT

The concept of operations proposed is to marry various size unmanned surface, subsurface and aerial unmanned vehicles to perform missions that the U.S. Navy has—and will continue to have—as the Navy-After-Next evolves. The Navy can use the evolving large unmanned surface vehicle as a “truck” to move smaller USVs, UUVs and UAVs into the battle space in the increasingly contested littoral environment.
46 | THE U.S. NAVY’S “HYBRID FLEET”
The T38 Devil Ray (Courtesy of Jack Rowley)
The T12 MANTAS viewed from the T38 Devil Ray (Courtesy of Jack Rowley)
The T38 Devil Ray and T12 MANTAS on a Joint Mission (Courtesy of Jack Rowley)
While there is a plethora of important Navy missions this integrated combination of unmanned platforms can accomplish, this article will focus on two: intelligence surveillance and reconnaissance (ISR) and mine countermeasures (MCM). There are many large, medium, small and ultra-small unmanned systems that can be adopted for these missions. The technical challenge remains that they must be designed to ensure that the “multiple sized” UxSs associated with these missions can be adapted to work together in a common mission goal.
Rather than speaking in hypotheticals as to how unmanned vehicles might be employed for these two missions, this article will offer concrete examples, using commercialoff-the shelf (COTS) unmanned systems that have been employed in recent Navy and Marine Corps events. In each case, these systems not only demonstrated mission accomplishment, but also the hull, mechanical and electrical (HME) attributes and maturity that Congress is demanding.
While there are a wide range of medium unmanned surface vehicles (MUSVs) that can potentially meet the U.S. Navy’s needs, there are three that are furthest along in the development cycle. These MUSVs cover a range of sizes, hull types and capabilities. They are:
ƀ The Vigor Industrial Sea Hunter is the largest of the three. The Sea Hunter is a 132-foot-long trimaran (a central hull with two outriggers).
ƀ The Textron monohull Common Unmanned Surface Vessel (CUSV) features a modular, open architecture design.



ƀ The Maritime Tactical Systems Inc. (MARTAC), catamaran hull, unmanned surface vehicles (USV) includes the MANTAS T12 and the Devil Ray T24 and T38 craft. All three USVs feature a modular and open architecture design.
All of these MUSVs are viable candidates to be part of an integrated unmanned solution CONOPS. I will use the MANTAS and Devil Ray craft for a number of reasons. First, they come in different sizes with the same HME attributes. Second, the Sea Hunter is simply too large to fit into the LUSVs the Navy is currently considering. Third, the CUSV is the MUSV of choice for the Littoral Combat Ship
If the U.S. Navy wants to keep its multi-billion-dollar capital ships out of harm’s way, it will need to surge unmanned maritime vehicles into the contested battlespace while its manned ships stay out of range of adversary A2/AD systems. Small and medium USVs, UAVs and UUVs need a “truck” to deliver them to an area near the battlespace. The Navy envisions LUSVs as being 200 feet to 300 feet in length and having full load displacements of 1,000 tons to 2,000 tons.
Depending on the size that is ultimately procured, the LUSV can carry a number of T38 Devil Ray unmanned surface
| 47
(LCS) Mine-Countermeasures Mission Package, and all CUSVs scheduled to be procured are committed to this program.
The T38 Devil Ray (Courtesy of Jack Rowley)
The T38 Devil Ray with the T12 MANTAS onboard (Courtesy of Jack Rowley)
The T38 Devil Ray with the T12 MANTAS onboard (Courtesy of Jack Rowley)
vehicles and deliver them, largely covertly, to a point near the intended area of operations. The T38 can then be sent independently to perform the ISR mission, or alternatively, can launch one or more T12 MANTAS USVs to perform the ISR mission. Building on work conducted by the Navy laboratory community and sponsored by the Office of Naval Research, the T38 or T12 will have the ability to launch unmanned aerial vehicles to conduct overhead ISR.
For the MCM mission, the LUSV can deliver several T38s equipped with mine-hunting and mine-clearing systems (all of which are COTS platforms tested extensively in Navy exercises). These vessels can then undertake the “dull, dirty and dangerous” work previously conducted by Sailors who had to operate in the minefield. Given the large mine inventory of peer and near-peer adversaries, this methodology may well be the only way to clear mines safely.
OPERATIONAL SCENARIO FOR AN INTEGRATED UNMANNED SOLUTION MISSION:
This scenario and CONOPS is built around an Expeditionary Strike Group (ESG) that is underway in the Western Pacific. The ESG is on routine patrol five hundred nautical miles from the nearest landfall. An incident occurs in their operating area and the strike group is requested to (1) obtain reconnaissance of a near-shore littoral area, and (2) determine if the entrance to a specific bay has been mined to prevent ingress. The littoral coastline covers two hundred nautical miles. This area must be reconnoitered within twenty-four hours without the use of air assets.
Command staff decides to dispatch the three LUSVs for the mission. Two LUSVs are each configured with four T38-ISR craft and the third LUSV is configured with four T38-MCM vessels. The single supervisory control station for the three LUSVs is manned in the mother-ship.
The three LUSV depart the strike group steaming together in a preset autonomous pattern for two hundred and fifty nautical miles to a waypoint that is central to the two hundred nautical mile ISR scan area, two hundred and fifty nautical miles from the shore. At this waypoint, the LUSV will stop and dispatch the smaller T38 craft and then wait at this location for their return. Steaming at a cruise speed of twenty-five knots, the waypoint is reached in about ten hours.
ƀ Two T38-ISR craft to be launched from each of the two LUSVs carrying the ISR craft. The autonomous mission previously downloaded specifies a waypoint location along the coast for each of the four craft. These waypoints are fifty nautical miles apart from each other, indicating that each of the four T38 craft will have an ISR mission of fifty nautical miles to cover.
ƀ Two T38-MCM craft to be launched from the third LUSV. The autonomous mission previously downloaded has them transit independently along different routes to two independent waypoints just offshore of the suspected mine presence area where they will commence mine-like object detection operations.
ƀ In this manner, each of the six craft will be transiting independently and autonomously to their next waypoint which will be the mission execution start point.
ƀ Transit from the LUSV launch point, depending on route, will be about two hundred and fifty to three hundred nautical miles to their near-shore waypoints. Transit will be at seventy to eighty knots to their mission start waypoint near the coast. Transit time is between four and five hours.
ƀ The plan is for each of the T38-ISR craft to complete their ISR scan in four to five hours each and for the two T38-MCM craft to jointly scan the bottom and the water column for the presence of mine-like objects in four to five hours at a scan speed of six to eight knots.
The MANTAS and Devil Ray craft transit to the objective area and conduct their ISR and MCM missions. The timeline for entire mission is as follows:
ƀ LUSV detach strike group to T38 launch point and launch six T38: – 10-12 hours
ƀ T38 transit from launch point to mission ISR/MCM start waypoints: – 4-5 hours
ƀ ISR Mission and MCM mission time from start to complete: – 4-5 hours
ƀ T38 transit from mission completion point back to LUSV for recovery: – 4-5 hours
ƀ LUSV recover T38s and return to strike group formation – 10-12 hours
Even with the ESG five hundred nautical miles from shore, the strike group commander has the results of the ISR and MCM scan of the shoreline littoral area within approximately twenty-four hours after the departure of the LUSVs from the strike group.
THE FUTURE OF UNMANNED SURFACE VEHICLES
This is not a platform-specific solution, but rather a concept. When Navy operators see a capability with different size unmanned COTS platforms in the water successfully performing the missions presented in this article, they will likely press industry to produce even more-capable platforms to perform these tasks.
While evolutionary in nature, this disruptive capability delivered using emerging technologies can provide the U.S. Navy with nearterm solutions to vexing operational challenges, while demonstrating to a skeptical Congress that the Navy does have a conceptof-operations for the unmanned systems it wants to procure.
Captain George Galdorisi (USN – retired) is a career naval aviator whose 30 years of active duty service included four command tours and five years as a carrier strike group chief of staff. He is the author of 15 books, including four New York Times best-sellers.
48 | THE U.S. NAVY’S
“HYBRID FLEET”
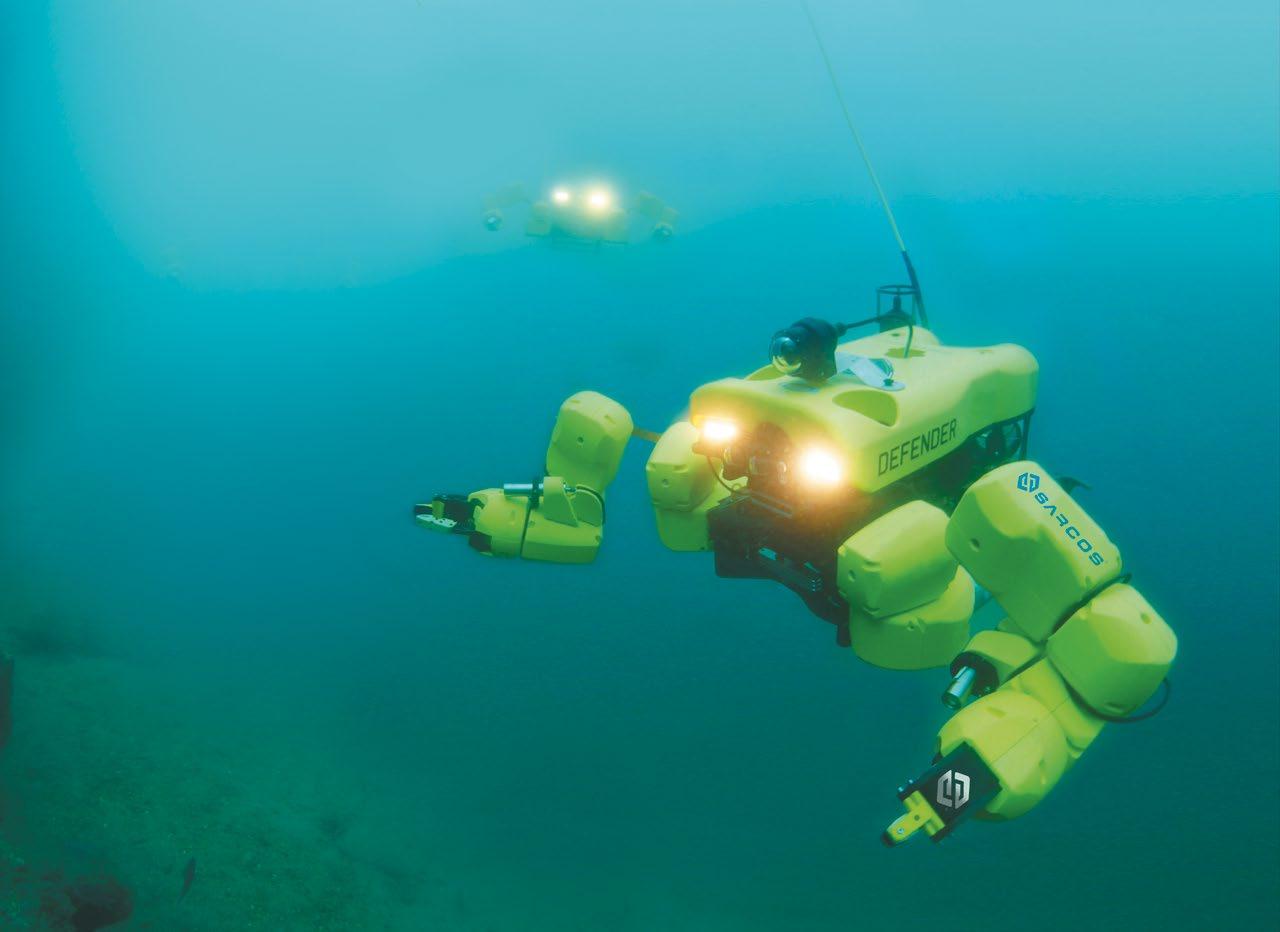

ROBOTICS


SAILBOARD or SUBMARINE? IT’S BOTH!
By Capt. Marc Deglinnocenti, U.S. Merchant Marine (ret.), oldarmada@gmail.com
When is a sailboard a submarine? It’s both when the ingenious minds at Gulfport, Mississippi, USA’s Ocean Aero design it to be. This autonomous vehicle named the Triton looks more like a sailboard minus the surfer than a submarine. Don’t let that fool you though. It can quickly transform itself into an Autonomous Underwater Vehicle (AUV).
don’t have to use them if you can just sail into a far-off operations area using its tall-ridged sail. This sail can be raised and lowered for various modes of operation too. It also uses the free energy of the sun to charge its batteries through its numerous carefully molded solar panels. Additional solar panels will soon be added to its ridged sail area for even more battery charging capability and therefore a greater range.
So, why not just design and build an AUV like so many other torpedo shaped powered AUVs and gliders if you want a diving AUV? Although some non-propelled gliders have impressive ranges, they’re still limited by their battery power levels.
On the other hand, an Uncrewed Surface Vehicle (USV) with a sail and solar panels has an extremely long range that might even become unlimited depending upon some favorable wind and weather conditions. Sure, it’s equipped with an electric motor and battery like so many other USVs, but you
That so called “unlimited” surface endurance is currently limited to just over 3 months due to a few maintenance and operational concerns however. Battery power, of course, is needed for its advanced communications and navigation systems and many other electrical functions, but Ocean Aero is working diligently to increase that 3-month endurance too. That 3-month surface endurance is enhanced by its 5-knot surface speed depending upon the sea state and other factors. That can possibly equate to a one way 10,800 nautical mile journey. The Trident’s capabilities and specifications are already quite impressive, but its greatest trick is yet to come. This autonomous sailboard can morph into an AUV and dive!
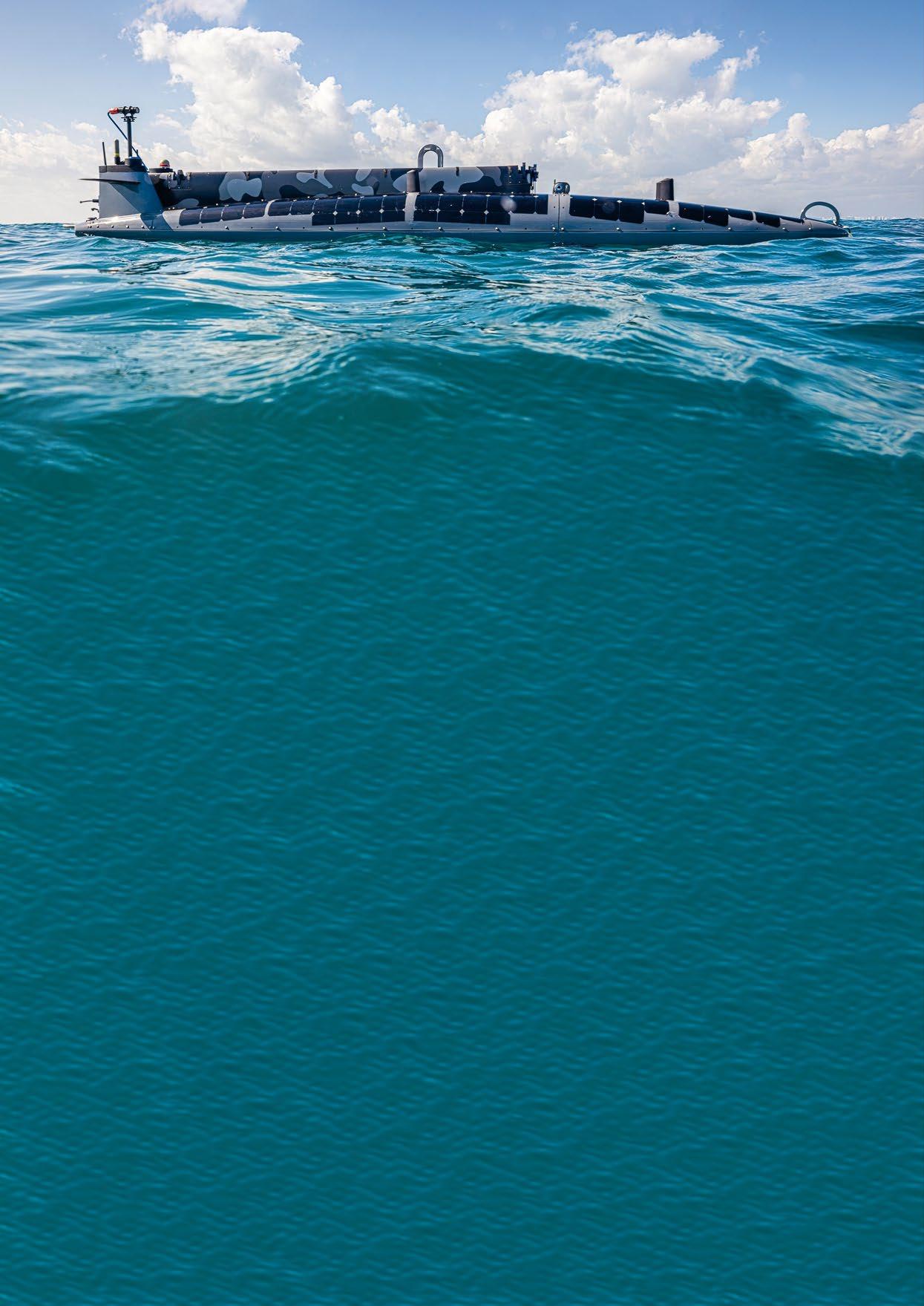
| 51
With its sail down and ready to dive, the gen III Triton AUV will soon become a 100-metre-deep diving UAV. (Photo courtesy of Ocean Aero)
Yes, the sail lowers itself; the ballast tank floods, and the now fully charged batteries can power its electric thruster for a maximum 100 metre (328 ft.) deep dive. The gen III Triton has now earned the new designation of AUSV (Autonomous Underwater Surface Vehicle). It can dive under the water at a speed of 2 knots. This means that it can now perform a myriad of tasks far beyond the average USV or AUV such as marine research, military and security operations, and even marine energy related work all with the advantages of almost unlimited endurance. If you reduce that 2-knot dive speed down to the minimum speed needed to keep it submerged, it can then stay underwater for over 5 days. Think of the civilian and military opportunities that it can bring to the table. The military is very much interested in those opportunities too.
Can an enemy submarine detect an Ocean Aero Trident sailing into its area of operation? There’s no propeller sounds whilst it’s sailing, and it’s not very noisy even when its small thruster is operating. It has a very low radar cross section too, especially with the sail down. Ocean Aero even boasts of a short ¼ mile (.40 km) radar detection range. It has a small visual silhouette with a gray camouflage paint scheme making it very difficult to see. The Trident can detect the enemy though depending upon how it’s equipped. Highdefinition cameras, infrared cameras, and sonars are just a few of its own means of detection. Can it detect enemy submarines once the gen III Trident AUSV has submerged? Yes, it can indeed. It can then surface and relay that information to headquarters via satellite communications, and that’s not all. It can also communicate that information to surface warships and other military assets the same way.

Thanks to the Lockheed Martin Ventures investment in Ocean Aero which began in 2017, the Trident can also communicate directly with the aircraft that might have subsequently been launched toward that submarine’s reported position. Now the Trident is relaying the submarine’s latest movements to aircraft overhead in real time. That’s extremely valuable information for either tracking a submarine’s movements or attacking it outright.


Chris Moran is the executive director of Lockheed Martin Ventures, and he has been quoted as saying, "Ocean Aero represents the next generation of environmentally powered, autonomous ocean systems. Our investment will allow us to better respond to customers’ maritime needs with technology solutions for a diverse set of missions." That’s a great testament to the military applications of Trident, but there are civilian uses also of value for the Trident. Another value of such an invention is usually overlooked- foul weather.
Often USVs and AUVs as well as commercial and recreational vessels take the weather for granted much to their own folly in many cases. The sea state or the size and frequency of the waves can also have a detrimental effect on small craft at sea. Sure, the weather can be predicted to a certain degree, but forecasts are still only predictions of the future weather.
52 | SAILBOARD OR SUBMARINE? IT’S BOTH!
Anastasia Flaherty shows off Ocean Aero’s Triton at Oceanology International America 2023 in San Diego, USA. (Photo courtesy of Capt. Marc Deglinnocenti)
Gen III Trident submerged. (Photo courtesy of Ocean Aero)
Sudden unpredictable microclimates can form at sea in the form of severe squalls. This AUSV can meet those challenges head on or head under by simply diving down beneath the stormy weather and rough waves for up to five days. It can then resurface, recharge, and resume its mission. Aborting a mission due to foul weather or even having your autonomous vehicle destroyed by a storm means a mission failure and a loss of valuable equipment and data. The Trident has the potential to turn a probable mission failure into a certain mission success. So, the Trident can handle all the dangers the vast deep oceans might throw at it while retaining its ability for shallow water operations as well. That deep water and shallow water versatility isn’t an accident either.

Rent from our inventory of almost 1000 products
Two locations for greatest accessibility

Norway and the UK
Ocean Aero’s versatility and capability is getting a lot of help from Teledyne Technologies, namely Teledyne Marine’s vast array of sophisticated marine instrument hardware and software technologies. You see, Ocean Aero first got its start in San Diego, California in 2013. Shortly thereafter Teledyne Technologies of San Diego started investing in Ocean Aero in 2014. This partnership, along with the Lockheed Martin Ventures partnership has lasted up to the present day. This strong triad, along with some other partners, has made Trident what it is today- a smart and versatile tool that is uniquely one of a kind in today’s marketplace of marine autonomous vehicles. This vehicle is truly worth owning for the one who wants it all in an AUV and an USV combined, or should we just say, “AUSV”?!
Equipment you can count on.
you can trust.
People
www.offshorerental.no BUYER’S GUIDE
Gen III Trident by Ocean Aero is both a sailing USV and a deep diving submarine. (Photo courtesy of Capt. Edward Lundquist, U.S. Navy, ret.)
This gen III Trident is being launched by the U.S. military. It is equipped with additional solar cells on its ridged sail as well as some other specialized gear. (Photo courtesy of Capt. Edward Lundquist, U.S. Navy, ret.)
Rotary Docking interfaces conforming to BS EN ISO 13628-8:2006 ROV interfaces on subsea production systems.
The ETT operates through a dedicated web browser interface, which enables seamless integration with both electric ROV’s &

The Jupiter Electric Torque Tool (ETT) is designed for Class 1-4 conventional ROV’s via an Intelligent Power Pod (IPP). The standard

communication interface is Ethernet 10/100 Base-T.
Specification


Max Working Torque: 30Nm to 2,711Nm
• Max Working Speed: 6RPM (fully variable)
• Torque Control Accuracy: ±2% of Torque Demand (271Nm to 2,711Nm) ±10Nm (30Nm to 270Nm)
• Size: 580 x 227 x 215mm
• Lightweight
Depth Rating: 3,000 msw (options to 6,000 msw)
•
• Power: 115VAC @ 800W (other options available)
• Communication:
Ethernet: 10/100 Base-T Serial: RS232 / RS485
For further information, contact sales@zetechtics.com
www.zetechtics.com

Tel: +44 1653 602020
UNVEILING THE TITANIC'S SECRETS AN AUV MISSION TO EXPLORE THE DEPTHS
 By David Blubaugh and Evaluated by Walter Van Der Heiden and Dr. Michael Findler
By David Blubaugh and Evaluated by Walter Van Der Heiden and Dr. Michael Findler
In the depths of the Atlantic Ocean lies the enduring mystery of the RMS Titanic, a symbol of human innovation and tragedy. Now, a groundbreaking AUV is set to embark on a daring mission, unveiling the untold stories of history's most iconic shipwreck. Join us on this captivating journey as we explore the key components and advanced technology behind the vessel that will navigate the treacherous waters and bring to light new insights into the Titanic's final resting place.
UNLEASHING THE AUTONOMOUS PIONEER: WHY A COMPLETELY AUTONOMOUS VESSEL REIGNS SUPREME IN TITANIC EXPLORATION
In the quest to unveil the Titanic's mysteries, the choice of technology is crucial. Meet the contenders: the AUV and the tethered ROV. While both have merits, the AUV stands tall as the unrivaled champion in exploring the Titanic's innards.
Unlike the tethered ROV, the AUV operates independently, roaming freely and nimbly through tight spaces and once inaccessible and unexplored areas inside Titanic’s remains. Unfettered by cables, it honors the spirit of adventure. Empowered by advanced algorithms, the AUV acts as an independent cognitive super explorer, making intelligent decisions in situ.
| 55
View of the bow of the RMS Titanic photographed in June 2004 by the ROV Hercules during an expedition returning to the shipwreck of the Titanic. (Courtesy of NOAA/IFE/URI)
ROS-2: THE OPERATING SYSTEM THAT POWERS THE EXPLORATION SYMPHONY
At the heart of the AUV's intelligence lies the Robot Operating System 2 (ROS-2), a powerful and flexible framework that orchestrates the vehicle's actions. Developed as an opensource platform, ROS-2 is a continuation of the original ROS, which has revolutionized the field of robotics with its modular and collaborative approach.
ROS-2's modularity allows seamless integration of various software components, sensors, and algorithms, creating a holistic view of the underwater environment. The AUV is equipped with an array of sensors, including high-definition cameras, sonar, lidar, and pressure sensors, providing realtime perceptions of the deep-sea landscape. The data from these sensors are processed and fused within the ROS-2 framework, generating a comprehensive and real-time internal view of the Titanic wreckage site.
ROS-2's flexibility facilitates the integration of intelligent algorithms that empower the AUV to make informed and autonomous decisions. From basic control algorithms for navigation and propulsion to advanced machine learning and cognitive deep learning algorithms for perception and decision-making, ROS-2 can accommodate a wide range of intelligent functionalities.
ROS-2's robustness and reliability also ensure that the AUV's operations can be efficiently managed and monitored remotely by operators on the surface. The framework's communication infrastructure allows for real-time data exchange, enabling operators to assess the AUV's status, review sensor data, and make decisions without direct physical intervention.
A crucial aspect of ROS-2's success lies in its vibrant and collaborative community of researchers, developers, and robotics enthusiasts. This community-driven approach fosters continuous improvement and innovation in the framework, ensuring that the AUV can leverage cuttingedge developments in robotics and artificial intelligence.
COMPUTING POWER: RASPBERRY PI 4 AND THE NVIDIA JETSON
To serve as the Full Authority Digital Electronic Computer (FADEC) for the AUV, two promising options are being considered and evaluated: the Raspberry Pi 4 and the
Nvidia Jetson computer module. Both platforms boast impressive processing capabilities, enabling real-time data analysis, decision-making, and navigation. The Raspberry Pi 4 is a widely acclaimed single-board computer known for its versatility and energy efficiency. Despite its compact size, it packs considerable computational power, making it an attractive option for resource-constrained devices like the AUV. The Nvidia Jetson computer module family is designed for edge computing applications that require high-performance graphics processing and AI capabilities. Equipped with powerful Nvidia GPUs, the Jetson modules enable accelerated computing for machine learning and deep learning tasks.
COGNITIVE DEEP LEARNING CONTROLLER: GUIDING THE AUV'S EXPLORATION
At the heart of the AUV's intelligence is the cognitive deep learning controller, a sophisticated system that guides the vehicle's exploration through a combination of past experiences and real-time data. This cognitive controller operates in tandem with ROS-2, providing a higher-level decisionmaking process that enables the AUV to adapt to the dynamic and unpredictable underwater environment.
The cognitive controller is trained using advanced machine learning algorithms on vast datasets containing sensor readings, navigation trajectories, and responses to different environmental conditions. By learning from this historical data, the controller gains insights into effective exploration strategies, obstacle avoidance, and artifact identification.
SPHERICAL SHAPE CONSTRUCTION: DESIGNING FOR STRUCTURAL INTEGRITY AND OMNIDIRECTIONAL MOVEMENT
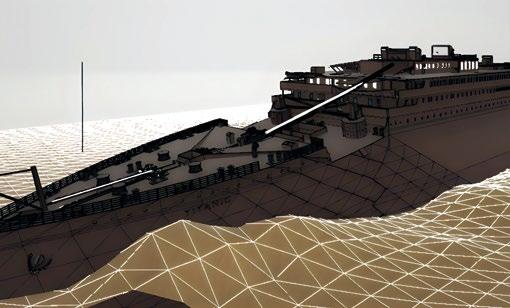
The AUV's spherical shape offers structural advantages, ensuring robustness, buoyancy, stability, and maneuverability. The innovative design of the AUV's spherical hull enhances its ability to withstand harsh underwater conditions, including the immense pressure and unpredictable currents of the deep sea. The AUV's eight thrusters grant precise control and movement, enabling exploration of tight spaces and reaching areas previously unseen since the sinking. This exceptional maneuverability allows the AUV to navigate and travel deep through the intricate interiors of the Titanic wreckage, capturing high-resolution images and collecting critical data from hard-toreach locations. The following figures (Figures 2a-2d) are related to the preliminary 3D CAD design of this novel AUV development.
THE QUEST FOR COMPACT AND UNTETHERED AUVS
We must consider that Titanic’s current state of deteriorated corridors and rooms, eroded by time and the ocean, poses a unique challenge for AUVs. Navigating these confined spaces demands a solution: compact Autonomous Underwater Vehicles (micro-AUVs) with a diameter not exceeding 20 inches (50.8 centimeters).
56 | UNVEILING THE TITANIC'S SECRETS: AN AUV MISSION TO EXPLORE THE DEPTHS
A CAD model of the front bow section of the RMS Titanic. This will simulate, train, validate, and verify the AUV’s Cognitive Deep Learning controller to explore the inner structures of the RMS Titanic. (Courtesy of David Blubaugh)
The Titanic's passageways, now narrow and collapsed, thwart larger autonomous vehicles. The 20-inch limit compels engineers to reimagine AUV design. Miniaturized sensors, thrusters, navigation systems, and small CPUs (Raspberry Pi) become vital in negotiating Titanic’s treacherous corridors. This size constraint fuels innovation in power management, communication, and data processing, all housed within the AUV's limited shell.
EXPLORING TITANIC'S DEPTHS WITH MICRO AUVS AND ADVANCED COMMUNICATIONS
Discovering the enigmas within the RMS Titanic's interior takes a leap into the future with micro-autonomous underwater vehicles (AUVs) and cutting-edge communication. These miniature explorers navigate the ship's intricate passages, capturing unprecedented images and artifacts. Fueling this endeavor is underwater wireless optical communication (UWOC), revolutionizing how AUVs transmit real-time data from Titanic's depths. Micro-LEDs enable high-speed data transfer, empowering human controllers aboard research vessels to monitor operations instantaneously. Overcoming challenges of deep-sea navigation and communication, this synergy of micro AUVs and UWOC redefines underwater exploration. Titanic's submerged stories, once confined to history, come alive as technology dives into uncharted waters, merging the past and future in a remarkable odyssey.
MISSION PLANNING FOR EXPLORING THE TITANIC SHIPWRECK
Planning an AUV mission to explore the internal structures and layout of the RMS Titanic shipwreck would require meticulous preparation and coordination. Here's a short step-bystep outline of how such a mission might be planned:
The mission planning team would conduct extensive research on historical records, previous exploration findings, and data from previous expeditions to the Titanic wreckage site. They would then analyze the available data to identify potential areas of interest, predicted dangers, and target locations for exploration.
Based on the research, the team would then select the appropriate sensors and algorithms to be integrated into the AUV. High-definition cameras, sonar, lidar, and pressure sensors would be crucial for generating a comprehensive real-time view of the wreckage site. The cognitive deep learning controller would facilitate intelligent decision-making during the mission.
Next, the team would define specific objectives for the mission, such as mapping the internal layout of the ship, identifying historically significant artifacts, and documenting the condition of the wreck. The AUV's parameters, including depth limits, exploration range, and areas of focus, would be set based on the mission objectives and constraints of the AUV's capabilities.

Before the actual mission, the AUV and its systems would undergo rigorous testing to ensure optimal performance and reliability. When everything else is ready, the AUV would be deployed to the Titanic wreckage site, either from a surface vessel or an underwater station, depending on the weather or ocean currents.
The AUV's remote operation and monitoring capabilities would allow human operators on the surface to monitor its progress, review sensor data, and make real-time decisions based on the information received. The AUV would navigate through the internal wreckage site using its eight orthogonally placed thrusters and spherical shape construction, enabling precise control and movement in any direction. It would explore tight spaces and reach areas previously unseen since the sinking.


The cognitive deep learning controller, equipped with advanced machine learning algorithms, would analyze sensor data to identify historically significant artifacts: parts of the ship's structure; personal belongings of passengers; or other items of historical importance. Throughout the mission, the AUV would document its findings with highresolution images and data. After the mission, the collected data would be further analyzed and interpreted by experts to gain deeper insights into the Titanic's internal layout and historical significance.

ENHANCING SAFETY THROUGH AUVS AFTER THE TITAN SUBMERSIBLE DISASTER
In the aftermath of the OceanGate Titan submersible disaster, AUVs have been highlighted as a safer alternative for human explorers in deep-sea missions. AUVs eliminate the need for direct human presence in treacherous underwater environments. With their advanced sensor systems and algorithmic intelligence, they can navigate hazardous conditions and respond dynamically to changing circumstances that will occur inside the Titanic’s remains. These capabilities ensure that AUVs adapt to avoid potential dangers more efficiently than tethered ROVs being controlled by manned submersibles operating on the exterior of the Titanic’s shipwreck. By deploying AUVs for future missions, we can enhance safety while still uncovering the mysteries of the deep ocean with this cutting-edge technology.
Maintenance Access Hatch Proximity Sensor Camera in the center Lidar/Proximity Sensor | 57
The exploration of the internal structures and layout of the Titanic shipwreck holds the potential for extraordinary discoveries. For example, the AUV could come across passengers’ items, such as jewelry, clothing, letters, or luggage, providing a poignant connection to the individuals who were onboard during the ship's journey.


Exploring the internal spaces, the AUV might also capture images of the ship's luxurious interiors. This includes the grand staircase remains, staterooms, and dining areas, offering glimpses of the opulence and design of the early 20th-century ocean liners. Discoveries in the engine room could shed light on the engineering marvels of the Titanic, showcasing the massive engines and machinery that powered the ship.
Furthermore, the AUV could uncover previously unseen structural details of the ship's wreckage, helping researchers understand the sequence of events leading to the ship's breakup and sinking. There are also stories of valuable items, including precious gems and artwork, that were rumored to be on board the Titanic. The AUV might well stumble upon long-lost treasures submerged for over a century. Examples of lost treasures discovered by this AUV could include the following (Figures 3a-3c):
Figure 3a: La Circassienne au Bain, also known as Une Baigneuse, was a large Neoclassical oil painting from 1814 by Merry-Joseph Blondel depicting a life-sized young naked

AUTHOR: DAVID ALLEN BLUBAUGH
Meet David Allen Blubaugh, a visionary electrical engineer on a mission to uncover the mysteries of the deep sea. Holding a Bachelor's and Master's degree in Electrical Engineering from Wright State University, Blubaugh's insatiable curiosity drives him to explore uncharted waters both in academia and the ocean's abyss.
Blubaugh's passion finds its pinnacle in micro autonomous underwater vehicles (AUVs), where he leads a groundbreaking effort to unveil the RMS Titanic's hidden interior. Using cutting-edge technology and engineering expertise, he aims to bring history to light.
A true advocate for progress, Blubaugh is
Circassian woman bathing in an idealized setting from classical antiquity. Figure 3b: Pocket watch retrieved from an unknown victim of the disaster. It had stopped at 02:28, a few minutes before the Titanic finally sank into the North Atlantic Ocean. Figure 3c: A collection of gold rings, sapphire rings, and diamond rings of many different eloquent designs that were retrieved from the Titanic shipwreck site.
OUR EXCITEMENT OF THE AUV EXPLORATION OF TITANIC:
Setting out on our exploration of the unexplored and deep interior of the Titanic using AUVs fills us with a sense of excitement and anticipation. The Titanic, a symbol of human innovation and tragedy, holds untold stories and historical secrets within its chambers. With advanced sensor technologies, cognitive capabilities, and precise maneuverability, these AUVs will embark on a daring journey, bringing the Titanic's enigmatic past to light.
The AUV embarks on its mission to explore the Titanic's final resting place, honoring the memory of those who perished and deepening our understanding of history. With cutting-edge technology and human ambition, this extraordinary mission illuminates the lost world of the Titanic, rewriting its narrative with each artifact it uncovers. We feel wonder and admiration for these intrepid explorers bridging the gap between past and present. The Titanic's secrets emerge from the depths. Join the thrilling odyssey of exploration, embracing the unknown and celebrating human ingenuity, as we uncover the untold and forgotten stories of the Titanic.
championing Kickstarter and Patreon campaigns to unite enthusiasts, scientists, and history buffs in advancing micro AUVs. Through these platforms, he seeks to expand the boundaries of ocean exploration. For those inspired to join his mission, David Blubaugh can be contacted at davidblubaugh2000@yahoo.com or reached via text at 1-937-304-7952.
Blubaugh's reach extends beyond the sea. He is the author of the acclaimed book "Intelligent Autonomous Drones by Cognitive Deep Learning," delving into the integration of robotic rovers in Egypt's catacombs, weaving technological advancement with historical significance.

58 | UNVEILING THE TITANIC'S SECRETS: AN AUV MISSION TO EXPLORE THE DEPTHS
(Courtesy of Wikipedia)
(Courtesy of Wikipedia/Digiblue)
(Courtesy of Wikipedia)




The OCEANS 2023 Gulf Coast conference is for global maritime professionals to learn, innovate and lead in the protection and utilization of the world’s largest natural resource – our OCEANS. Visit us at gulfcoast23.oceansconference.org September 25-28 Biloxi, MS 100+ Exhibitors 2,000 Attendees 500 Technical Papers Unlimited Opportunities






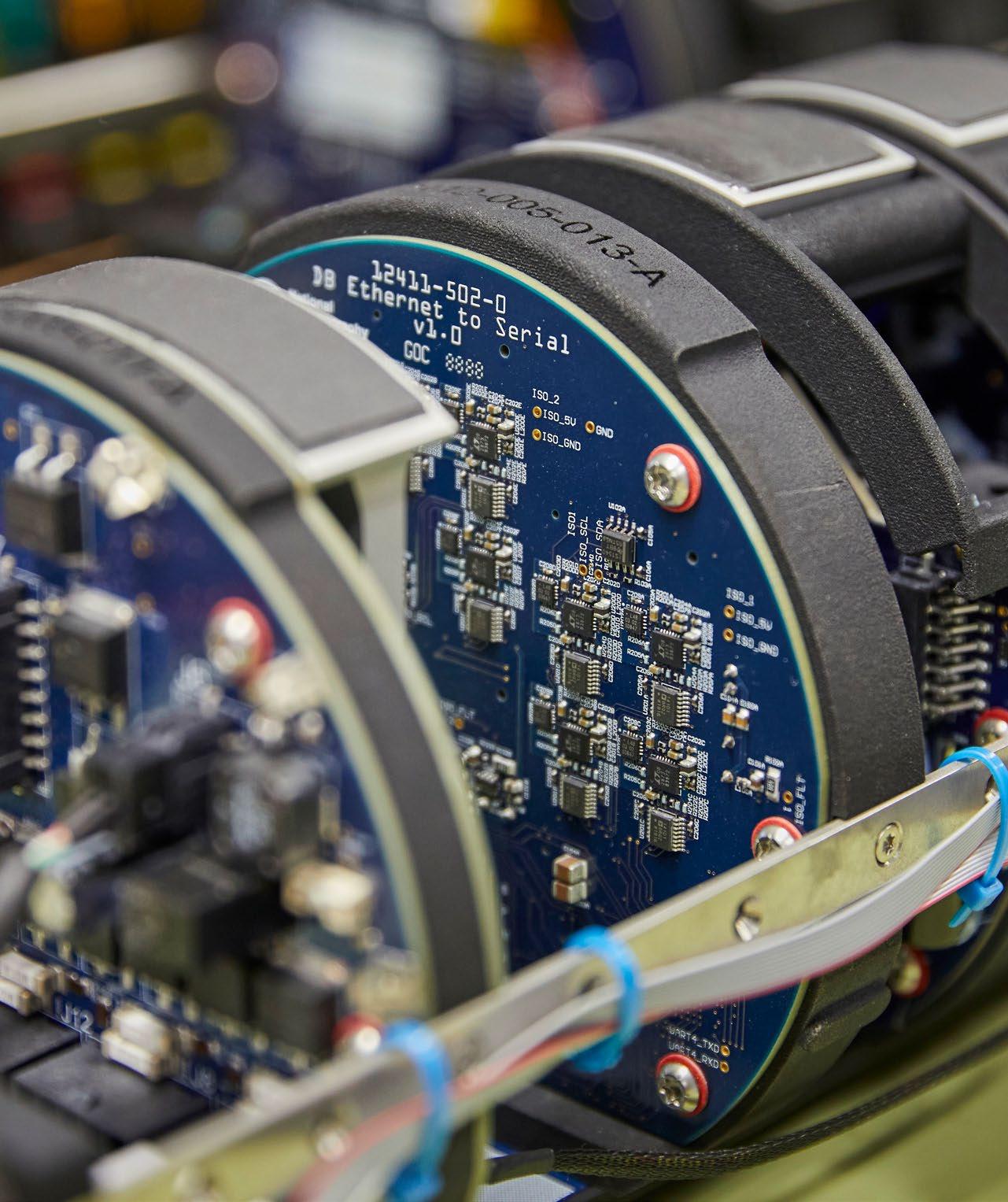
FLOATING OFFSHORE WIND 2023 #FloatingWind23 4 & 5 OCT | ABERDEEN EVENT PARTNERS REGISTER NOW
NOC-EVENTS.CO.UK/MATS-2023 07–09 NOVEMBER SOUTHAMPTON MATS is a key event in the marine technology calendar, attracting delegates from around the world, hosted at the National Oceanography Centre’s dockside location in Southampton. Join us for a packed three days of insightful presentations and networking opportunities, focusing on new developments and innovations.
National Oceanography Centre

















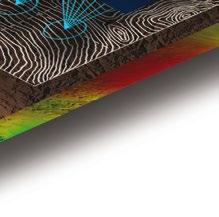























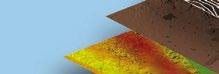





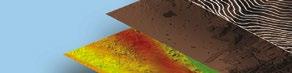





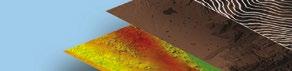






























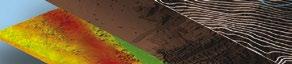








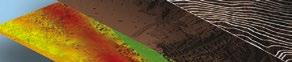

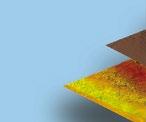


















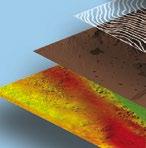
























































































































































































































SAE Media Group Proudly Presents the 2nd Annual
Unmanned Maritime Systems Technology USA


Optimizing US Naval Capabilities with Next-Generation Unmanned Maritime Systems
The Hilton Arlington, VA
SEPT 2023 27-28
SPONSORS
US SPEAKERS INCLUDE:
Captain Colin Corridan, Commodore Task Force 59, Commander, Unmanned & A.I. Integration, US Navy
Dr Craig Sawyer, Doctor of Engineering, DoN Unmanned Task Force Chief Strategy & Analysis Officer, OPNAV N9I S&T Advisor, NATO Maritime Unmanned Systems Initiative Steering Board Chairman, US Navy
Captain Jason Weed, Commanding Officer, Unmanned Undersea Vehicles Squadron ONE UUVRON-1, US Navy
Captain Cameron Chen, Branch Head, Navy Expeditionary Combat Branch (N957), Expeditionary Warfare Division (N95), US Navy

Captain Chad F. Hennings, Commanding Officer, Naval Undersea Warfare Center, Division Newport, US Navy
Captain Erik Thomas, MQ-4C Triton Deputy Program Manager, Program Management Office PMA-262, US Navy
Captain Ryan Ventresca, Commodore Mine Countermeasures Group Three, US Navy
Captain Thomas Remmers, Unmanned Sytems Cross-Functional Work Group Lead, Assistant Commander for Capabilities (CG-7 UxS), US Coast Guard
Mr Robert Iannuzzi, Director of Unmanned and Autonomous Systems Development and Integration, Naval Surface Warfare Center Carderock Division
Dr Christopher Ekstrom, Deputy Oceanographer and Navigator of the Navy, Technical Director OPNAV N2N6EB, Chief of Naval Operations, US Navy
Mr Richard Ast, Director, Unmanned Systems Technology UxST, Office of the Under Secretary of Defense for Research and Engineering (OUSD R&E)
Mr Mike Tall, Senior Scientific Technical Manager, Integrated Autonomous C4ISR, Naval Information Warfare Center (NIWC) Pacific
Mr Samuel Bendett, Analyst, Russia Studies Program, Center for Naval Analysis
Mr Kevin Pollpeter, Senior Research Scientist, China and Indo-Pacific Security Affairs Division, Center for Naval Analysis
Mr Philip L. Hoffman, Uncrewed Maritime Systems Research & Development Coordinator, National Oceanic & Atmospheric Administration (NOAA)
INTERNATIONAL MILITARY SPEAKERS INCLUDE:
Rear Admiral James Parkin, Director Develop, Royal Navy
Commander Marty Van Duin, Section Head Future Operations, NATO Allied Maritime Command (MARCOM)
Commander Pieter Blank, Innovator Program Manager, Royal Netherlands Navy
Mr Ferdinand Peters, Naval Systems Architect, Ministry of Defence, the Netherlands
SPECIAL RATES AVAILABLE FOR INTERNATIONAL MILITARY AND GOVERNMENT REPRESENTATIVES & FREE TO ATTEND FOR ALL SERVING US MILITARY & DOD PERSONNEL (EXCLUDING CONTRACTORS) SMi Group Ltd trading as SAE Media Group SAE Media Group Defence @SAEMGDefence #UMSTUSA
www.umst-usa.com/oceanroboticsplanet
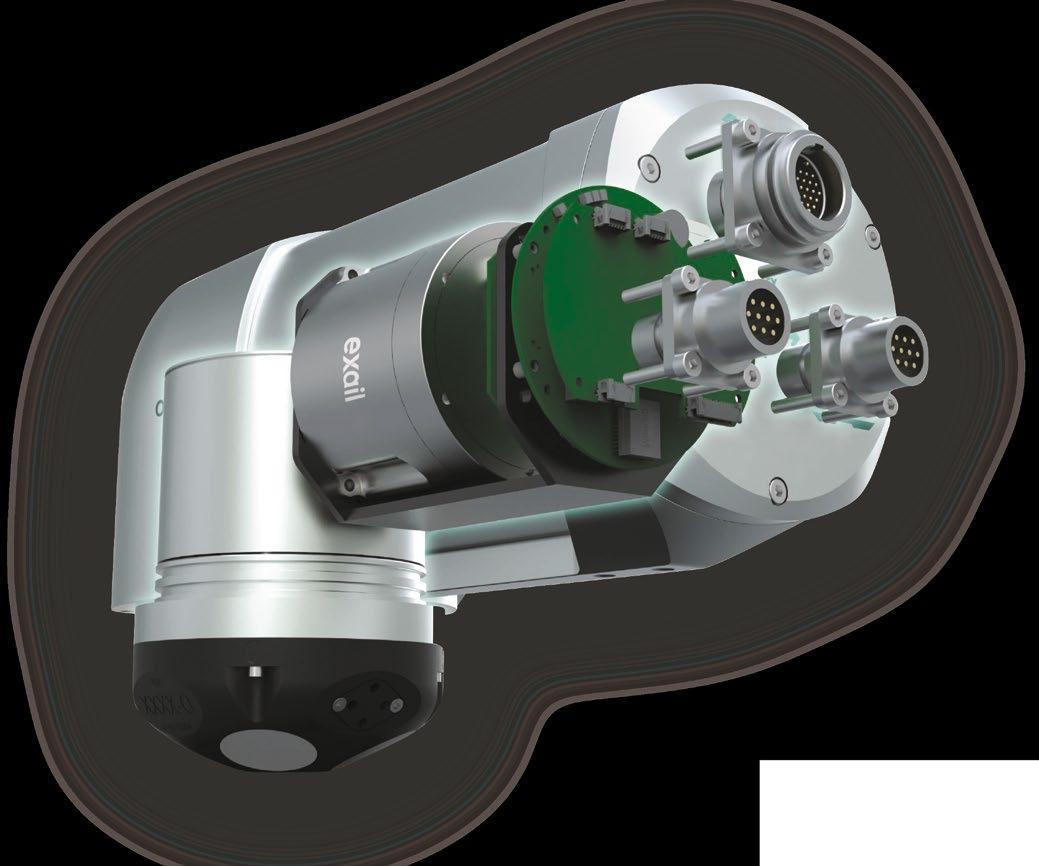
formerly ECA Group & iXblue
