Automatización de flotas desde la infraestructura.
Javier Araluce Ruiz

Javier Araluce Ruiz
Vehículos autónomos necesitan bastantes componentes





GNSS Cámaras LiDARs Radar

Ordenador con GPU



Caro Difícil de escalar Algunos problemas


El sistema está optimizado para zonas donde la infraestructura puede controlarse y adaptarse al entorno operativo.
Aplicaciones típicas:
• Cocheras: control de acceso y ubicación automática de unidades.
• Puertos y fábricas: gestión de vehículos logísticos y de carga.
• Aparcamientos: detección, guiado y supervisión de plazas.
Un enfoque práctico y eficiente que evita la instalación de sensores en cada vehículo.

Antes del cruce → la solución en el vehículo es más económica.
Después del cruce → la solución basada en infraestructura ofrece menor coste total siendo más escalable.
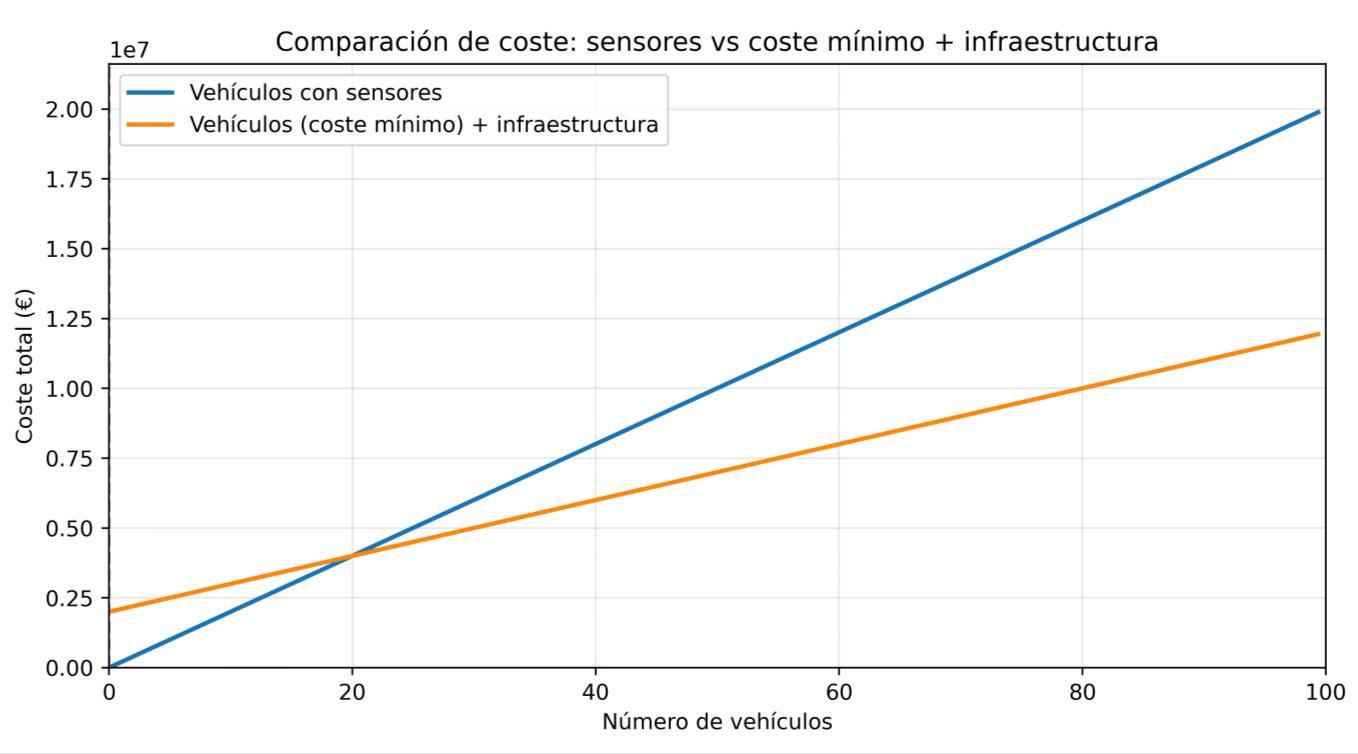
Punto de cruce
¿Por
creemos
2 3 4
Un vehículo inteligente/autónomo necesita una gran cantidad de sensores. Si además analizamos el caso en concreto de percepción, la necesidad de tener todo un vehículo sensorizado sin puntos ciegos es bastante costoso, especialmente en vehículos voluminosos como camiones


Al instalar los sensores en la infraestructura en lugar de en los vehículos, se reduce el mantenimiento, ya que están protegidos del desgaste y las condiciones adversas. Esto permite menores costos, fácil acceso para su servicio y mayor durabilidad del sistema.


Los conductores pueden mejorar su visión con espejos y cámaras, pero su campo de atención es limitado. En cambio, un sistema basado en infraestructura funciona como un “ojo que todo lo ve”, observando toda la escena a la vez y evitando la pérdida de información.
Eficiencia computacional
El procesamiento de la infraestructura se puede realizar en centros de datos con potencia suficiente y debidamente refrigerados que se encargan de procesar la información de todos los sensores. Ahorrando en cómputo y consumo energético en el vehículo.


Gemelo digital para la navegación autónoma en túneles desde infraestructura


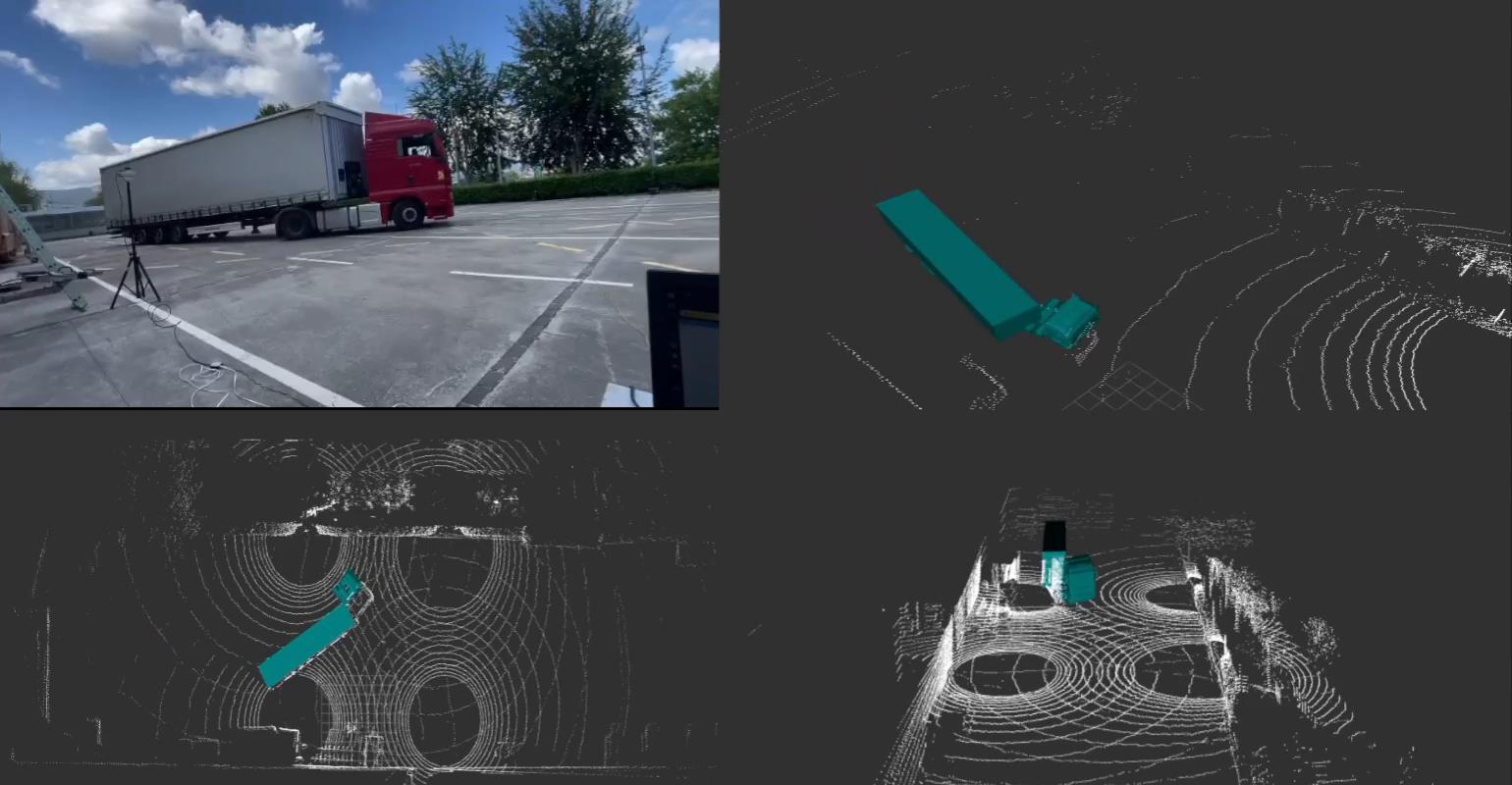
Monitorización de la maniobra de docking de un vehículo pesado para ayudar al conductor

Sistema cooperativo de asistencia al conductor para navegación en la terminal de un puerto
Maniobra más resiliente y añadir la funcionalidad de aparcado desde infraestructura


Controlar un shuttle desde la infraestructura en una maniobra degradada por la perdida del sistema de posicionamiento embarcado
Los vehículos articulados presentan la complejidad de funcionar como dos partes rígidas que van unidas. La estimación de su posición es fundamental para poder realizar maniobras de docking donde la estimación del ángulo entre la cabeza tractora y el remolque es un parámetro de suma importancia.
La información de la posición de ambas partes puede ser transmitida tanto al conductor para realizar maniobras asistidas como a un sistema automatizado que realice la maniobra de manera segura.
Los puertos presentan escenarios complejos debido a su variabilidad.
Por ello el despliegue de soluciones cooperativas que permitan la actualización y monitorización de estos entornos es vital para poder garantizar soluciones automatizas resilientes.

La automatización desde la infraestructura permite hacer maniobras sin la necesidad de sensorizar los vehículos.
La infraestructura posiciona al vehículo en el entorno y le comunica las maniobras que tiene que realizar, ahorrando en sensores, sistemas de procesamiento…
Evita fuentes de errores externas (GNSS) ya que todo el procesamiento se realiza en local, pero la infraestructura al estar posicionada permite realizar maniobras globales.


