1 minute read
Problem Statement


There are three problems we had to solve in our project, including the generalization of the Model, and the data set labeling:
0 1-M A N U A L L A B E L I N G OF L A R G E D A T A S E T S :
Advertisement
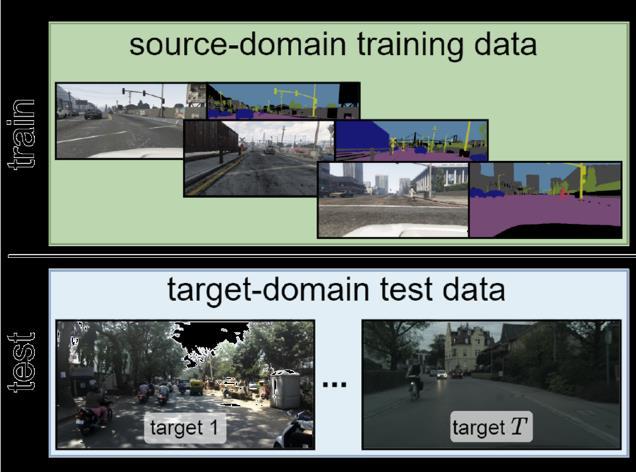
The supervised approach requires a lot of annotated data. The pixel-level labeling of large datasets [such as Cityscapes] is extremely costly due to the amount of human effort required [Manual Labeling]. Like in Figure 3.a.
02-D E A L I N G W I T H D I F F E R EN T C O N T E X T S I N S E L F-D R I V I N G C A R S:
In the context of self-driving cars, the perception system is often put to test in various scenarios including different cities, weathers, or lighting conditions. There is a distribution shift under different contexts, as we see in Figure3.b, the source is from one Domain and multi target. So this will be a problem if the model is ungeneralizable.
0 3-L I T E R A T U R E D E A L S W I T H M U L T I P L E C O N T E X T S A S A S I N G L E-T A R G E T :
Most previous works address the single-target setting whose goal is to adapt from source to a particular target domain of interest. To deal with multiple test distributions, one can adopt single-target techniques by either:
Training multiple models for all target domains and adaptively activating one at test time This Strategy raises storage issues for embedded platforms. Merging all target data and treating them as being drawn from a single target distribution. This Strategy overlooks distribution shifts across different target domains.
Fig3.a