5 minute read
Methodology


w e u s e d d e ep l a p v 2 a s o u r m o d e l i t i s b u i l t u p o n t h e r e s n e t-1 0 1 b a c k b o n e i n i t i a l i z e d w i t h i m a g e n e t p r e-t r a i n e d w e i g h t s , c o n d u c t e d w i t h p y t o r c h , t h e d e e p L a b p i p e l i n e a s i t ' s a p p e a r i n f i g u r e 8-a.
D E E P L A P V 2
Advertisement
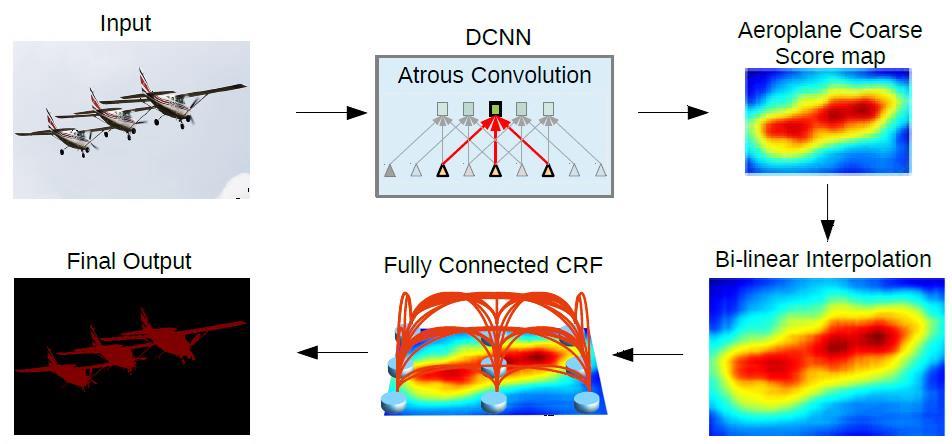
It uses ResNet-101: Atrous Convolution. Atrous Spatial Pyramid Pooling (ASPP) – [New in V2]. Fully Connected Conditional Random Field (CRF).
Fig8-a
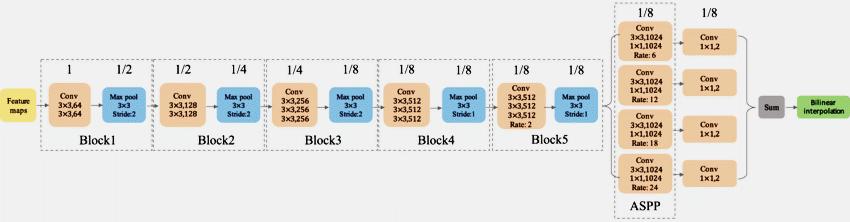
Fig8-b - explain the backbone of deep lab version-2 model.
01- Atrous Convolution:
It is also called “algorithme à trous” and “hole algorithm”. It is also called “dilated convolution”. It is commonly used in wavelet transform and right now it is applied in convolutions for deep learning.
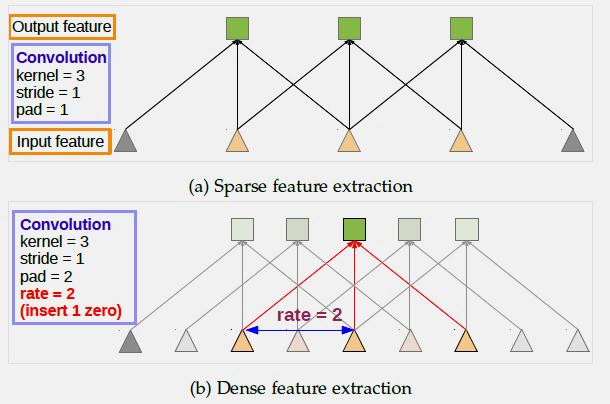
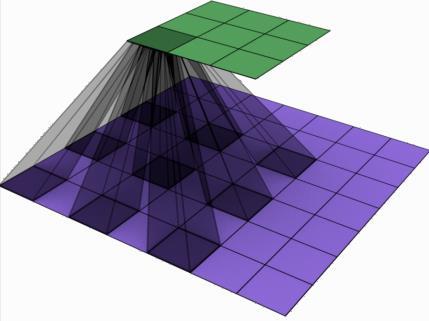
Fig9-a-1 Fig9-a-2
02- Atrous Spatial Pyramid Pooling (ASPP):
ASPP is an atrous version of SPP, in which the concept has been used in SPPNet. In ASPP, parallel atrous convolution with different rates are applied in the input feature map, and fuse together. As objects of the same class can have different scales in the image, ASPP helps to account for different object scales which can improve the accuracy.
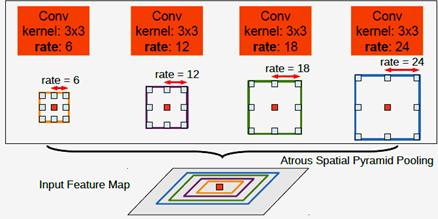
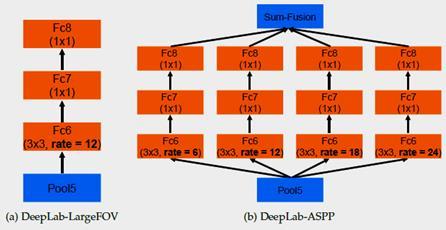
Fig9-b-1 Fig9-b-2
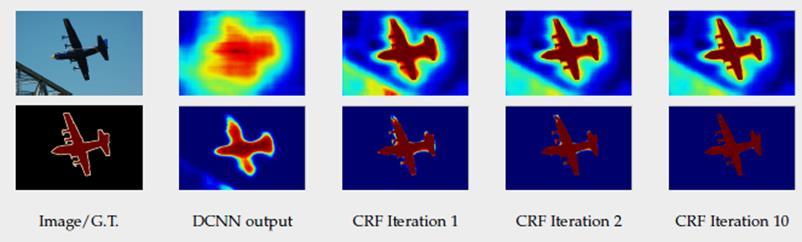
Fully Connected CRF is applied at the network output after bilinear interpolation. It is the weighted sum of two kernels: The first kernel depends on pixel value difference and pixel position difference, which is a Bilateral filter that has the property of preserving edges. The second kernel only depends on pixel position difference, which is a Gaussian filter.
Adversarial Adaptation to Multiple Targets
As we decided to work with two models Baseline and MTKT, Our first Model `Baseline` strategy is to merge all target datasets into a single one and then deal as a single target. See Figure 11-a.
BASELINE – AdvEnt: The Segmenter F is decoupled into a Feature Extractor [Ffeat] followed by a Pixel-wise Classifier [Fcls]. Handle ONLY one Source Domain and one Target Domain. In Multiple Target Domains, we merge all target datasets into a single one It utilizes an existing single-source single-target UDA framework.
In our second model `MTKT` is a multi-target knowledge transfer, which has a target-specific teacher for each specific target that learns a target-agnostic model thanks to a multiteacher/single-student distillation mechanism. See Figure 11-a.
Multi-Target Knowledge Transfer: Multiple Teachers – Single Student Approach Two types of classifier branches: Target-specific branches [Multiple Teachers]: each one handles one specific [sourcetarget] domain shift.
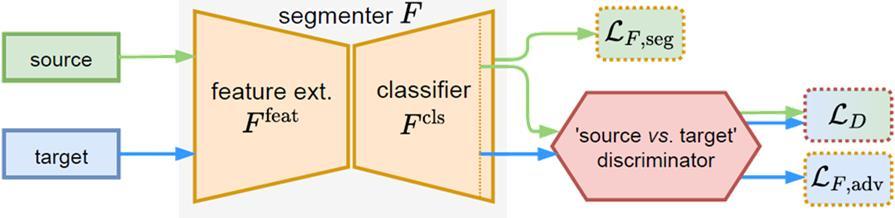
Fig11-a
Fig11-b
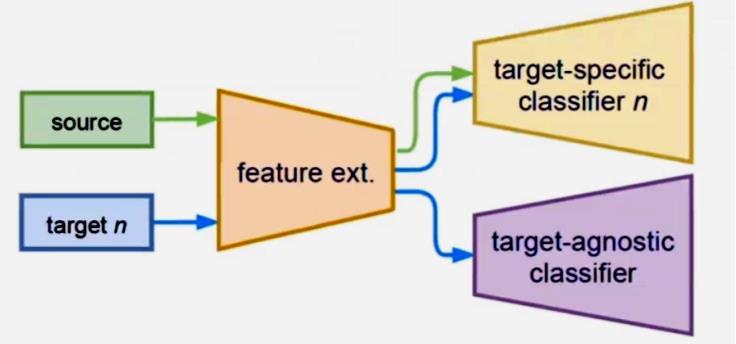
Target-agnostic branch [One Student]: fuses all the knowledge transferred from the target-specific branches
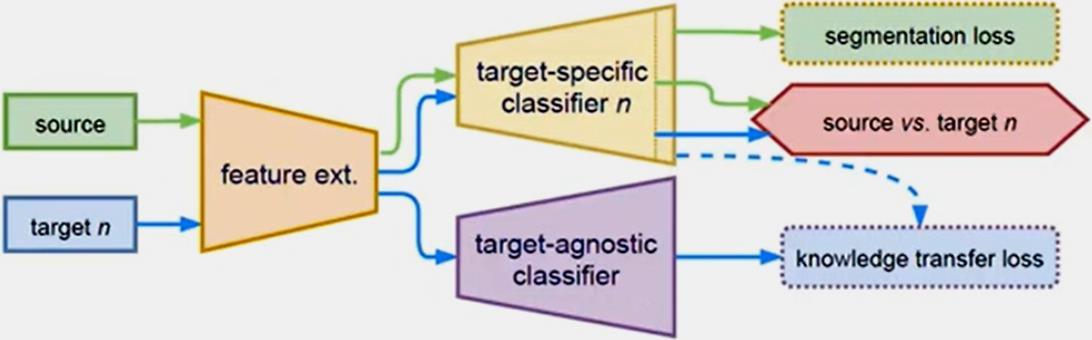
Fig11-b
LOSS FUNCTIONS
#1 Adversarial Discriminator Loss: The Discriminator [D] is a fully-convolutional binary classifier with parameters (φ). It classifies the Segmenter’s output (Qx) into either: class 1 (source) or 0 (target).
Targets [Cityscapes + Mapillary]
EQN-1
Fig12-a
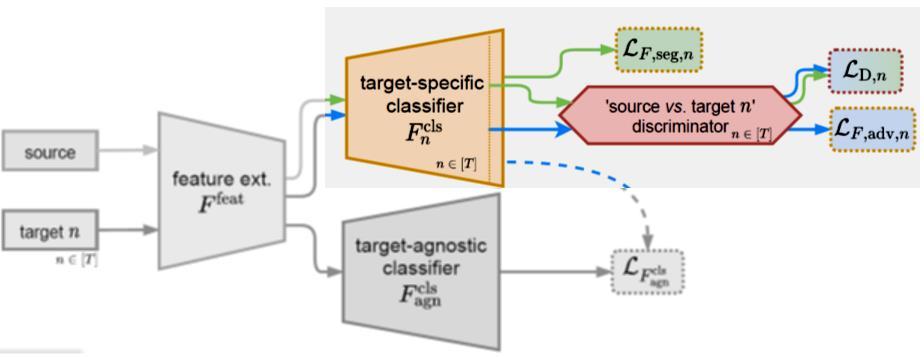
#2 Segmentor Loss:
The Segmenters [Fcls-n] is trained over its parameters (θ) NOT Only to minimize the supervised segmentation loss LF, seg on sourcedomain data. But also to fool the discriminator D via minimizing an adversarial loss LF, adv. The weight [λ_ adv] balancing the two terms. During training, one alternately minimizes the two losses LD and LF.
2 Target-specific classifiers + 2 Discriminators.
EQN-2

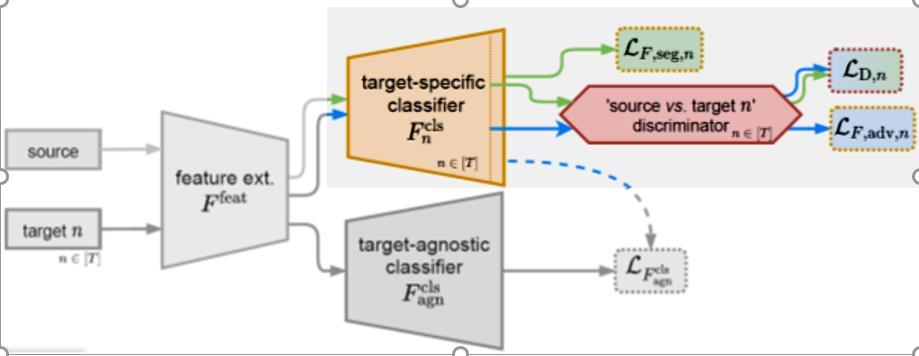
Fig13
#3 Knowledge Transfer Loss:
The Agnostic classifier [Fcls-agn] is trained over its parameters to minimize over the segmenter’s parameters (including feature extractors). The [Student] fuses all the knowledge transferred from the T-targetspecific classifiers [Teachers] via minimizing the Kullback-Leibler divergence between teachers’ and student’s predictions on target domains.

EQN3-a
EQN3-b
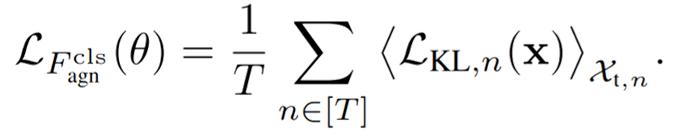
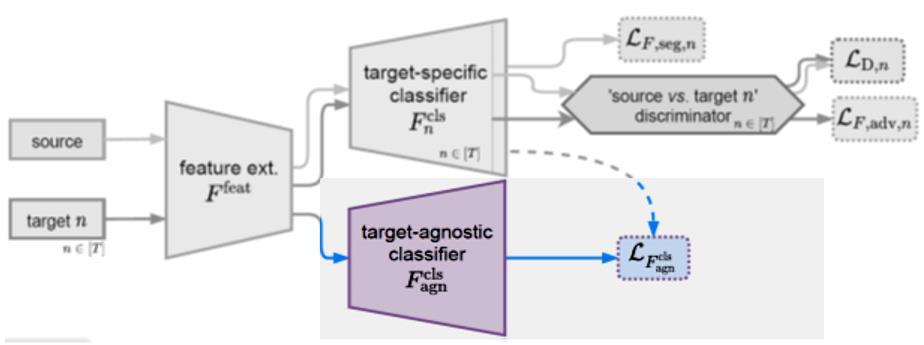
Fig14
Implementation Details
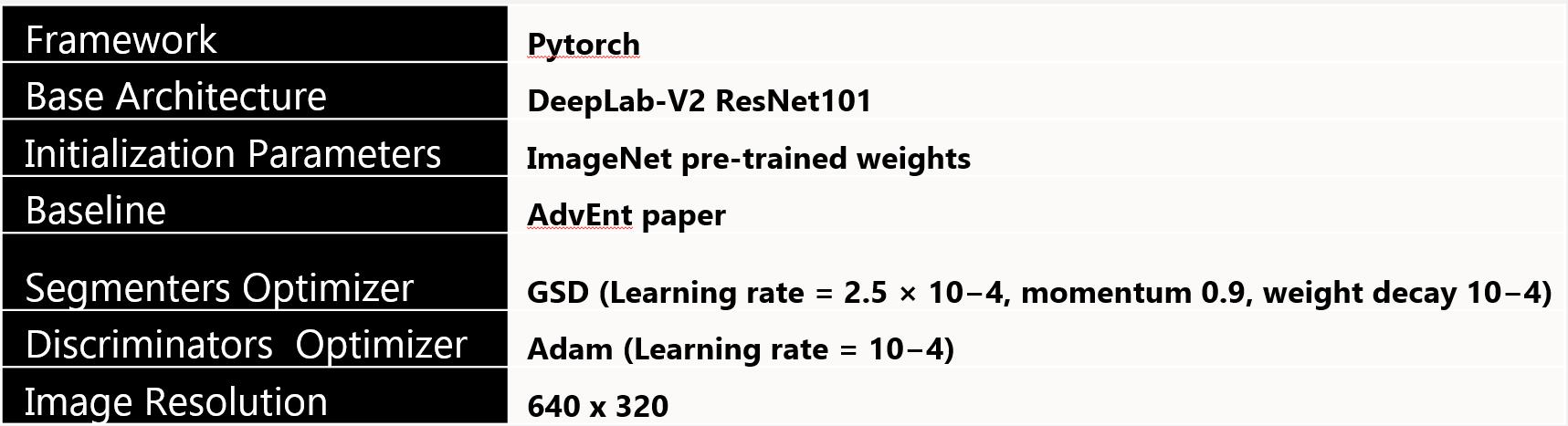
We preferred using Pytorch as our Framework, as we mentioned before we used the pretrained Deep Lab Model version-2,
The below Table shows the implementation details that we used in our experiment:
The important point here is that, the target-specific branches, which is the teacher as the figure 13 explains. We try to learn the feature with 20000 iteration
In MTKT, we “warm-up” the Target-specific branches for 20,000 iterations before training the Target-agnostic branch.
The warm-up step avoids the distillation of noisy target predictions in the early phase, which helps stabilize Target-agnostic training.
We introduce two adversarial frameworks: (i) multi-discriminator, which explicitly aligns each target domain to its counterparts, and (ii) multi-target knowledge transfer, which learns a target-agnostic model thanks to a multi-teacher/single-student distillation mechanism. The evaluation is done on four newly-proposed multi-target benchmarks for UDA in semantic segmentation. In all tested scenarios, our approaches consistently outperform baselines, setting competitive standards for the novel task.
Evaluation Metrics - Intersection over Union [ IoU ]
As shown in figure 16-a-2, the IoU is the intersection of predicted and Ground Truth over the union between them.

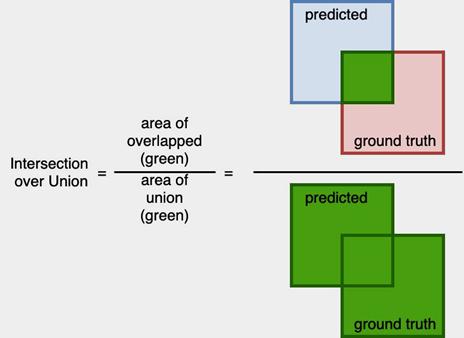
Fig16-a-1 Fig16-a-2
Mapillary
BASELINE
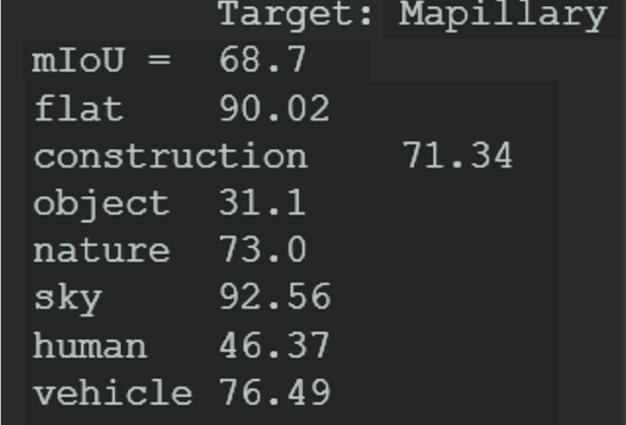
Fig16-b
MTKT
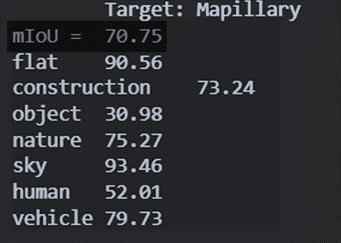
Fig16-d
IoU Score
Cityscapes
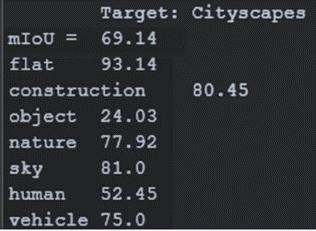
Fig16-c
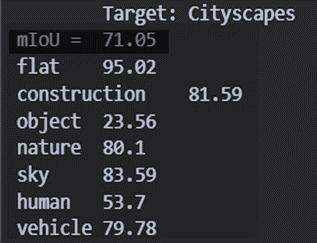
Fig16-e
Features that we care more about