1ª edição São Paulo/SP, 2023
Ensino Médio Livro do aluno
Conjunto de ROBÓTICA Educacional
Equipe editorial
Gerência e Coordenação editorial
Everton Ferreira de Oliveira
Edição
Hikaro Queiroz, João Guedes, Mikael Ribeiro, Everton Ferreira de Oliveira
Coordenação de Revisão
Everton Ferreira de Oliveira
Revisão e Qualidade
Everton Ferreira de Oliveira, Luciana Camargo de Moura Oliveira
Cotejo e Iconografia
Everton Ferreira de Oliveira, Mikael Ribeiro
Projeto gráfico, Diagramação e Capa João Guedes
Ilustrações
Engino Education, Robot Innovation
Coordenação de Processos
Everton Ferreira de Oliveira
Processos
Hikaro Queiroz, João Guedes, Mikael Ribeiro, Everton Ferreira de Oliveira
Autoria
Everton Ferreira de Oliveira
Reprodução proibida. Art. 184 do Código Penal e Lei 9.610 de 19 de fevereiro de 1998. Todos os direitos reservados - Copyright© Robot Innovation (Soluções Educacionais).
Dados Internacionais de Catalogação na Publicação (CIP) | (Câmara Brasileira do Livro, SP, Brasil)
Xxxxxxxx
Xxxxxxxxxxx
ISBN: xxxxxxxx
Xxxxxxxxx
Xxxxxxx Xxxxxx
Índices para catálogo sistemático:
XXXXXXXX
XXXXXXXXX
Apresentação
Neste livro abordaremos os seguintes modelos:
STEM & Robotics Produino Set (E40.1)



O conjunto educacional STEM & Robotics Produino foi especialmente projetado para crianças do ensino médio com mais de 12 anos, mas é ideal para alunos mais velhos de 12 a 16 anos ou mais e até mesmo escolas profissionais e engenheiros amadores.
Com atividades experimentais inovadoras, abrange os assuntos centrais de STEM e avança para programação avançada com codificação textual. Além de seu controlador principal, ele incorpora um processador Arduino adicional que permite projetos DIY "Do It Yourself" (Faça Você Mesmo) abertos. O conjunto vem em um conveniente recipiente de armazenamento de plástico que contém um grande número de peças estruturais e técnicas ENGINO® e dispositivos robóticos de alto nível, como o exclusivo controlador Produino. Possui 2 motores DC, um servo motor, um sensor de toque, 2 sensores IR (infravermelho), um sensor de cor, um sensor ultrassônico e um sensor giroscópio/acelerômetro. Além da tela programável, ele possui convenientemente uma grande placa de ensaio integrada para criar seus próprios circuitos. Permite a construção de mais de 30 modelos STEM e Robóticos.
Especificações:
» Banheira de plástico (43 x 31 x 15 cm) com divisórias internas;
» 406 peças plásticas, 1914 pontos de conexão;
» Compartimento de bateria para 6 pilhas AA;
» Controlador Produino com 7 portas de entrada-saída;
» Conectividade via USB e Bluetooth;
» Plataforma Arduino embarcada, Display 128x64;
» Opção de módulo de bateria recarregável;*
» Placa de ensaio integrada para aplicação de circuitos eletrônicos;
» 1 Servo motor com conector RJ;
» 1 sensor de toque e 1 sensor ultrassônico;
» 1 bússola/magnetômetro;
» 1 sensor de cor e 2 sensores IR;
» 2 motores CC.
* O módulo de bateria recarregável pode substituir as baterias 6xAA. Pode ser carregado através da porta USB do controlador e está incluído na versão E40.1B. Também é vendido separadamente como complemento com o código E42.
Código do produto: E40.1
GinoBot™ é o novo robô híbrido da ENGINO®! Ele foi desenvolvido como um robô pronto para programar, garantindo que habilidades de codificação possam ser ensinadas sem perder tempo construindo modelos. Apreciando, no entanto, a importância da construção de modelos, o corpo do GinoBot™ possui inúmeras geometrias de conexão ENGINO® integradas. Esta capacidade de expandir o robô de acordo com a idade, nível e conhecimento do aluno ajuda os professores a acompanhar atividades interdisciplinares STEM e a aplicar metodologias de aprendizagem baseadas em investigação. A Premium Edition vem com uma variedade de sensores e recursos e pode ser usada para uma ampla gama de atividades e desafios de codificação, escaláveis dependendo da idade do aluno.

Especificações:
» 2 x motores redutores CC incorporados;
» 5 x botões para programação manual;
» Bluetooth e Wi-Fi;
» Porta-lápis para desenhar formas durante o movimento;
» 3 x sensores de proximidade (dianteiro e traseiro para evitar obstáculos);
» 2 x sensores de cores inferiores para acompanhamento de linha e reconhecimento de cores;
» 4 x LEDs coloridos programáveis que também indicam operação;
» 2 conectores RJ para conectar motores adicionais e sensores mais avançados;
» Alto-falante com campainha;
» Cabine removível para inserir módulos adicionais;
» Interruptor liga/desliga;
» Conector micro USB com cabo USB;
» Placa adaptadora de PCB de plástico para Arduino, Micro:bit ou Raspberry Pi com peças de conexão;
» Bateria recarregável de lítio;
» 1 x sensor ultrassônico na frente;
» 1x motor de eixo duplo com cabo;


» 249 peças estruturais e mecânicas ENGINO®;
» Instruções digitais para 10 modelos.
GinoBot Premium Edition (E51.1)
Código do produto: E51.1
O conjunto STEM Mechanics Master é a combinação definitiva dos principais assuntos de Máquinas Simples e Física, incluindo Níveis, Polias, Engrenagens, Ligações, Leis de Newton, Conversão de Energia, Energia Solar e Estruturas. A geometria patenteada dos componentes ENGINO® permite conectividade a todas as direções do espaço 3D, permitindo aos usuários criar facilmente modelos técnicos. Este conjunto exclusivo aumenta a criatividade e a imaginação ao mesmo tempo que ensina uma variedade de princípios STEM. Um motor DC redutor com um grande painel solar está incluído para animar as construções ENGINO®, convertendo energia solar em eletricidade. O conjunto vem com uma biblioteca de engrenagens, polias e eixos de alta precisão para alterar velocidade, força e direção do movimento. Neste conjunto, além de projetos abertos, os alunos podem encontrar instruções digitais para 100 modelos de trabalho e incríveis engenhocas animadas como carros, guindastes, pontes!

Especificações:
» Banheira de plástico (43 x 31 x 15 cm);
» 283 peças plásticas;
» 1037 pontos de conexão;
» Instruções digitais para 96 modelos;

» Divisor interno;
» 1 motor CC;

» Sistema de engrenagens;
» Sistema de polias;
» 1 painel solar de 3 V com cabo.
STEM Mechanics Master Set (E97.1) E97.1
Compatível com: WINDOWS ANDROID iOS MacOS Linux
Conheça seu Livro �������������������������������������������� 7 Ícones ���������������������������������������������������������������������������������9 Conheça seu Livro �������������������������������������������� 7 Ícones ���������������������������������������������������������������������������������9 Conheça seu Livro �������������������������������������������� 7 Ícones ���������������������������������������������������������������������������������9 Conheça seu Livro �������������������������������������������� 7 Ícones ���������������������������������������������������������������������������������9 SUMÁRIO
8
Conheça seu livro
Sumário
Veja nesta página tudo que aprenderá ao longo do livro.
Tópicos
Ferramentas; Mat iais necessários Vamos aprender
Procedimento; Passo a passo; Siga as instruções
Exercícios; Avaliação; Vamos aprender Resumo; Leia...
Você sabia?; Dica; Curiosidades Pesquise; Procure
A Importância da Robótica
Olá caro aluno!
Vamos alar sobre um brinquedo incrível que vai desper ar o seu interesse pelo mundo da obótica e da ecnologia: o Engino STEM & Robotics! Além disso vamos explorar por que aprender obótica é ão impor ante para as nossas vidas O Engino STEM & Robotics não é apenas um simples br inquedo de montar é uma verdadeira janela para o mundo da ciência, ecnologia, engenharia e matemática, também conhecidas como disciplinas STEM. Ele permite que você crie suas próprias máquinas robôs e estruturas funcionais, tudo isso enquanto aprende de fo ma prática e divertida. A melhor parte é que você não precisa ser um especialista em robótica para começar O kit geralmente inclui peças áceis de montar motores sensores e instruções passo a passo para te guiar em sua jornada de criação Agora, por que aprender robótica é ão importante? Bem, a obótica está se tornando uma parte essencial do nosso mundo Aqui estão algumas razões pelas quais você deve considerar mergulhar nesse campo:

Criatividade In ação: Ao iar próprias máquinas obôs ocê está exe citando sua criatividade e habilidades de esolução de problemas Imagine desenvolver um obô que ajude a resolver desafios do cotidiano ou até mesmo contribuir para a indústria e pesquisa.
» Preparação para o Futuro: A tecnologia está avançando rapidamente, e muios empregos futuros provavelmente estarão relacionados à obótica e automação Aprender sobre isso agora pode te dar uma antagem competitiva mercado de trabalho
Unidade
Veja nesta página a unidade de aprendizagem e o modelo utilizado.
Unidade 1: Aulas de robótica (E51.1)
Conheça seu Livro 7 Ícones 9 Conheça seu Livro 7 Ícones 9 Conheça seu Livro 7 Ícones 9 Conheça seu Livro 7 Ícones 9
SUMÁRIO
A Importância da Robótica
Veja nesta página a importância da robótica na educação e em nossas vidas.
Ícones do seu livro
15
Conheça alguns dos ícones que podem aparecer em seu livro.
Lição 1: GinoBotTartaruga marinha Lição
Aplicativo GinoBot e GinoBot RC Caretta Caretta é uma tartaruga marinha. Caretta Caretta retorna a cada época de reprodução para a mesma praia de desova para colocar seus ovos. Nos últimos anos, as atividades antropogênicas levaram a uma redução drástica de suas populações e Caretta Caretta está ameaçada de extinção.
Vamos aprender: Como montar o GinoBot. » Como programar manualmente. » Como controlar seu GinoBot sem fio.
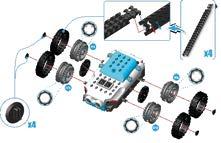
Materiais Necessár os: GinoBot. Dispositivo inteligente com GinoBot RC app instalado Mapa de praia e mar.
Veja qual lição, o que vai aprender e materiais necessários.
Procedimento:

1 Use cartão com as instruções do GinoBot para montar o GinoBot.




Procedimentos e Exercícios
18
2 Descubra o método de programação manual do GinoBot. Para gravar e executar um programa, siga as etapas do exercício 1 3 Use as instruções para montar a tartaruga marinha de papel para decorar o GinoBot. 4 Leia o exercício 2 e aprenda a criar um programa manual com o GinoBot ajude a tartaruga marinha a evitar os obstáculos chegar na praia. Imprima o mapa (ou faça o seu), adicione os obstáculos, grave a sequência e verifique se a sequência está correta. 5 O GinoBot pode se conectar sem fio com um dispositivo inteligente. Para ativar este recurso, verifique se há dispositivos Bluetooth através do aplicativo GinoBot RC e conecte seu dispositivo. Leia e responda ao exercício 3 GinoBot Modelo “tartaruga marinha” ug
Exercícios:
Exercício 1: Siga as etapas para programar GinoBot manualmente:

1. Pressione botão "Play" por 2 segundos para iniciar gravação do programa (as luzes do GinoBot ficarão vermelhas).
2. Pressione qualquer um dos botões de navegação para verificar se ele se move crie uma sequência de comandos.
3. Para interromper gravação do programa, pressione o botão "Play" uma vez (as luzes vermelhas do GinoBot se apagarão).
4. Pressione o botão "Play" novamente para executar o programa. Qual sequência de comandos seu GinoBot executou?
Você também pode tentar outras combinações.
Exercício 2: Pressione os botões corretos para criar o programa apropriado que pode ajudar tartaruga a seguir rota para a praia de desova. Calcule distância total que sua tartaruga percorreu para chegar praia (lembre-se que cada passo tem 10cm): Distância= _____________ cm Agora, encontre e programe uma rota mais curta para ajudar tartaruga a chegar mais rápido à praia de desova.
Meça a distância novamente.
Exercício 3: ire algum tempo e dirija o aplicativo GinoBot com GinoBot RC! Tente entender suas funções da melhor forma possível! Como ele se move para frente para trás? Como robô gira? Como você pode acender suas luzes? Tente dirigir GinoBot nas mesmas rotas do exercício 2 com o app GinoBot RC.
10
Acompanhe passo a passo do procedimento e resolva os execícios.
Tópicos
Ferramentas; Materiais necessários...
Vamos aprender
Procedimento; Passo a passo; Siga as instruções...
Exercícios; Avaliação; Vamos aprender...
Resumo; Leia...
Você sabia?; Dica; Curiosidades...
Pesquise; Procure...
A Importância da Robótica
Olá caro aluno!
Vamos falar sobre um brinquedo incrível que vai despertar o seu interesse pelo mundo da robótica e da tecnologia: o Engino STEM & Robotics! Além disso, vamos explorar por que aprender robótica é tão importante para as nossas vidas.
O Engino STEM & Robotics não é apenas um simples brinquedo de montar, é uma verdadeira janela para o mundo da ciência, tecnologia, engenharia e matemática, também conhecidas como disciplinas STEM. Ele permite que você crie suas próprias máquinas, robôs e estruturas funcionais, tudo isso enquanto aprende de forma prática e divertida. A melhor parte é que você não precisa ser um especialista em robótica para começar. O kit geralmente inclui peças fáceis de montar, motores, sensores e instruções passo a passo para te guiar em sua jornada de criação.
Agora, por que aprender robótica é tão importante? Bem, a robótica está se tornando uma parte essencial do nosso mundo. Aqui estão algumas razões pelas quais você deve considerar mergulhar nesse campo:
» Criatividade e Inovação: Ao criar suas próprias máquinas e robôs, você está exercitando sua criatividade e habilidades de resolução de problemas. Imagine desenvolver um robô que ajude a resolver desafios do cotidiano ou até mesmo contribuir para a indústria e pesquisa.
» Preparação para o Futuro: A tecnologia está avançando rapidamente, e muitos empregos futuros provavelmente estarão relacionados à robótica e automação. Aprender sobre isso agora pode te dar uma vantagem competitiva no mercado de trabalho.
» Pensamento Lógico: A robótica envolve lógica e programação. Ao entender como os robôs funcionam, você está aprimorando suas habilidades de pensamento lógico e algorítmico, que são úteis em várias áreas da vida.
» Colaboração Multidisciplinar: A robótica une várias disciplinas, como engenharia mecânica, eletrônica e programação. Isso significa que você terá a oportunidade de aprender um pouco de tudo, o que é uma habilidade valiosa.
» Solução de Problemas do Mundo Real: A robótica pode ser aplicada para resolver problemas do mundo real, desde questões ambientais até desafios da medicina. Imagine criar um robô que ajude a limpar os oceanos ou a auxiliar cirurgiões em procedimentos complexos.
Portanto, o Engino STEM & Robotics é uma porta de entrada para esse empolgante mundo da tecnologia e inovação. À medida que você cria, monta e experimenta, estará desenvolvendo habilidades cruciais para o futuro. Abrace a oportunidade de aprender robótica e veja como você pode fazer a diferença no mundo!
Divirta-se montando e explorando o universo da robótica!
14
Aulas de robótica (E51.1)


15 Unidade 1:
Lição 1: GinoBotTartaruga marinha
Aplicativo GinoBot e GinoBot RC
Caretta Caretta é uma tartaruga marinha. Caretta Caretta retorna a cada época de reprodução para a mesma praia de desova para colocar seus ovos. Nos últimos anos, as atividades antropogênicas levaram a uma redução drástica de suas populações e Caretta Caretta está ameaçada de extinção.
Vamos aprender:
» Como montar o GinoBot.
» Como programar manualmente.
» Como controlar seu GinoBot sem fio.
Materiais Necessários:

» GinoBot.
» Dispositivo inteligente com GinoBot RC app instalado.
» Mapa de praia e mar.
Procedimento:
1 Use o cartão com as instruções do GinoBot para montar o GinoBot.
Exercícios:
Exercício 1: Siga as etapas para programar o GinoBot manualmente:

1. Pressione o botão "Play" por 2 segundos para iniciar a gravação do programa (as luzes do GinoBot ficarão vermelhas).
2. Pressione qualquer um dos botões de navegação para verificar se ele se move e crie uma sequência de comandos.
3. Para interromper a gravação do programa, pressione o botão "Play" uma vez (as luzes vermelhas do GinoBot se apagarão).

2 Descubra o método de programação manual do GinoBot. Para gravar e executar um programa, siga as etapas do exercício 1
3 Use as instruções para montar a tartaruga marinha de papel para decorar o GinoBot.
4 Leia o exercício 2 e aprenda a criar um programa manual com o GinoBot e ajude a tartaruga marinha a evitar os obstáculos e chegar na praia. Imprima o mapa (ou faça o seu), adicione os obstáculos, grave a sequência e verifique se a sequência está correta.
5 O GinoBot pode se conectar sem fio com um dispositivo inteligente. Para ativar este recurso, verifique se há dispositivos Bluetooth através do aplicativo GinoBot RC e conecte seu dispositivo. Leia e responda ao exercício 3

4. Pressione o botão "Play" novamente para executar o programa.
Qual sequência de comandos seu GinoBot executou?
Você também pode tentar outras combinações.
Exercício 2: Pressione os botões corretos para criar o programa apropriado que pode ajudar a tartaruga a seguir a rota para a praia de desova.
Calcule a distância total que sua tartaruga percorreu para chegar à praia (lembre-se que cada passo tem 10cm): Distância= _____________ cm
Agora, encontre e programe uma rota mais curta para ajudar a tartaruga a chegar mais rápido à praia de desova. Meça a distância novamente.
Exercício 3: Tire algum tempo e dirija o aplicativo GinoBot com GinoBot RC! Tente entender suas funções da melhor forma possível! Como ele se move para frente e para trás? Como o robô gira? Como você pode acender suas luzes?
Tente dirigir o GinoBot nas mesmas rotas do exercício 2 com o app GinoBot RC.

18
Avançar/ Voltar Play Esquerda/ Direita
GinoBot Modelo “tartaruga marinha”
Lição 2: Carro automatizado
KEIROTM e Diagrama de Fluxo
Um elemento-chave de qualquer sistema robótico é o software de programação. KEIROTM é uma plataforma de programação baseada em blocos que permite diferentes métodos de programação. Você pode usá-lo para editar o programa e adicionar funcionalidades complexas com o uso do Diagrama de Fluxo.
Vamos aprender:
» Como executar um programa manual em um loop.
» Como programar com KEIROTM.
» O que é um fluxograma.
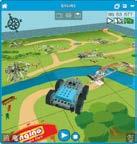
» O ambiente de simulação EnViRo.
Materiais Necessários:
» GinoBot
» PC ou dispositivo inteligente com KEIROTM software instalado
Procedimento:
1 Criar o programa manual do exercício 1 e responda às perguntas.
2 Conecte o GinoBot a um PC usando o cabo USB ou a um dispositivo inteligente via Bluetooth. Abra o software KEIROTM e clique no botão conectar USB ou Bluetooth. Na barra de menus do software, clique no botão "Receive program" para carregar a sequência gravada no PC ou tablet. Verifique o fluxograma que aparece no KEIROTM e complete os exercícios 2 e 3.


3 Agora vamos ver como podemos programar em um mundo digital 3D! Leia o exercício 4 e abra o EnViRo, que é um simulador que executa código em um ambiente virtual.
Saída
Sensores integrados
Controles
Operadores
Funções
Variáveis
Exercícios:
Exercício 1: Ligue o seu GinoBot e use a programação manual para gravá-lo movendo-se 40 cm para frente e 20 cm para a direita.

a) Você pode usar botões manuais para outros movimentos?
b) Quais recursos do GinoBot não podem ser programados com programação manual?
Exercício 2: Confira como o programa que você acabou de fazer, aparece agora em blocos. Os blocos são criados verticalmente no "Diagrama de Fluxo"
Escreva qual é a saída de cada bloco de código.
Você pode modificar seu código para que o GinoBot avance por 3 segundos?
Exercício 3: Você pode criar um programa para que o carro automatizado se mova como mostrado no caminho abaixo?
menu KEIROTM
Exercício 4: Abra a janela do EnViRo, selecione a trilha "Park" e execute o mesmo programa do exercício 4! Faça 3 alterações no seu código. Que mudanças você escolheu?
20
START 90º 90º FIM 180º Obstáculo
KEIRO
Lição 3: Torne-se um artista
EnViRo e sensor ultrassônico
Paul Klee é um artista famoso, que muitas vezes desenhava usando linhas e formas simples. Ele disse: "Um desenho é simplesmente uma linha que vai para uma caminhada". Você pode fazer seus próprios desenhos usando o GinoBot e formas?
Vamos aprender:
» Código usando blocos de controle.
» "Repeat times" e "wait until".
» Como usar o sensor ultra-sônico.
Materiais Necessários:
» GinoBot.
» PC ou dispositivo inteligente com KEIROTM/ EnViRo.
» Marcador para o suporte do GinoBot.
Procedimento:
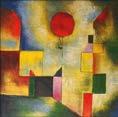
1 Estude o desenho de Paul Klee's "O Balão Vermelho" e responda à pergunta no exercício 1
2 Algumas formas são feitas por um padrão repetido, por exemplo, um quadrado repete o mesmo comprimento em todos os quatro lados. Loops repetidos são usados para executar uma série de comandos várias vezes. Isso torna a programação mais simples. Tudo o que você precisa fazer é identificar o padrão repetido em um código. Adicione um marcador no suporte de marcadores do GinoBot's e programe o GinoBot para desenhar formas nos exercícios 2, 3 e 4.
3 Use o EnViRO e programe o robô para que seu movimento forme as mesmas formas do exercício anterior e responda à pergunta no exercício 5
4 O sensor ultra-sônico mede a distância a um obstáculo usando ondas sonoras. Com o resultado, o sensor retorna a um número. Coloque a mão na frente do GinoBot como gatilho para começar a desenhar uma forma e fazer o exercício 6. Use o operador "comparação numérica" para comparar a distância pelo sensor com a distância que você deseja colocar sua mão.

Alternativa: Se você não tiver o sensor ultrassônico, use os sensores IR frontais.
5 Desafio Extra: É a sua vez de se tornar um artista! Crie sua própria pintura com formas como Paul Klee fez com GinoBot e um papel. Você deve criar um programa que desenha formas em uma linha. Você também pode tentar desenhar mais formas, como um círculo ou um hexágono. Adicionar cores. Experimente o seu desenho também com "Brush Map" no EnViRo.
Exercícios:
Exercício 1: Quantas formas diferentes você pode contar no desenho? Você consegue encontrá-los todos?
Exercício 2: Programe o GinoBot para que seu movimento forme um quadrado com 20 cm de lado. Use o botão "Repeat times" loop e os comandos apropriados para mover o GinoBot. Não se preocupe se a forma não for perfeita, ainda é arte!
Dica:
Para ajudá-lo a localizar o padrão, pense em como calculamos a circunferência de um quadrado.
Exercício 3: Você pode programar o GinoBot para desenhar um retângulo e um triângulo regular? O que você precisa mudar?
Dica:
Para o ângulo do triângulo use giro de 120º.
Exercício 4: Você pode calcular a circunferência das formas?
Quadrado= Retângulo= Triângulo=
Exercício 5: As formas que você desenhou com o GinoBot são completamente precisas? Vamos tentar usar o mesmo código em um ambiente virtual com a faixa "Brush Map" no EnViRo. Que diferenças você percebe entre o desenho físico e o virtual das formas?
Exercício 6: Use o ultrassom para programar seu GinoBot quando começar a desenhar.
» O GinoBot deve esperar até que o valor do ultrassom seja menor que 5cm (distância da sua mão)
» Em seguida, ele deve desenhar a forma que você escolher (e.g. square).
Alternativa:
» Aguarde até que o IR detecte sua mão, em seguida, comece a desenhar.
22
20cm 10cm 30cm
repeat times AFTER 4 < Value 2 Value 1 Ultrasonic Distance Seleione Comparação Defina valor de comparação Wait Until
< Value 2 Value 1 Ultrasonic Distance i Seleione Comparação Defina valor de comparação Wait Until Wait Until Front Left = true i
Unidade 2: Mestre mecânico (E97.1)








Lição 1: Alavancas e Ligações
Exercícios:
Exercício 1: Preencha as caixas usando as palavras: carga, esforço, fulcro (1 ponto).
Que classe é esse tipo de alavanca? Escreva alguns exemplos da vida cotidiana da mesma classe de alavanca (1 ponto)
Exercício 2: Junte as fotos com as frases corretas (1 ponto)
1 Alavanca de primeira classe
2 Alavanca de segunda classe
3 Alavanca de terceira classe
4
Exercício 3: Abaixo você pode ver vários dispositivos e ferramentas que usamos na vida diária. Estude as imagens cuidadosamente e escreva a classe de cada alavanca: primeira classe, segunda classe ou terceira classe. Em seguida, preencha os pequenos quadrados escrevendo E para esforço, C para carga e F para fulcro, nos pontos exatos onde são aplicados (3 pontos).


Exercício 4: Preencha as lacunas usando as palavras apropriadas da caixa (2 pontos)
carga, primeira classe, segunda classe, grande, fulcro, ganho, esforço, terceira classe, alavanca, perder.


Um ..................................... é uma haste rígida (ou barra) que gira em torno de um ponto fixo chamado .... ................................. e pode ser usado para mover objetos pesados facilmente.


O peso do objeto que queremos mover é chamado de ..................................... , enquanto a força que aplicamos para movê-lo é chamado ................................................... .
Com a ajuda de alavancas, podemos aplicar uma pequena quantidade de esforço, a fim de mover um ...... ............................... peso. Atenção embora! O que ..................................... em vigor nós ........................... .......... na distância.
Exercício 5: Estude a próxima imagem e expresse o significado da famosa frase de Arquimedes sobre alavancas: "Dê-me um lugar para ficar e eu moverei a Terra!" (2 pontos).
5
Exercício 6: Circule as dessa ligação (2 pontos)
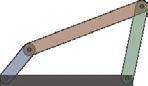
Exercício 7: Junte as fotos com as frases corretas (2 pontos)
1 Articulação de movimento paralelo
2 Articulação do pedal


3 Ligação de movimento reverso

4 Alternar vinculação
5 Ligação da manivela do sino
6
Exercício 8: Preencha as lacunas usando as palavras apropriadas da caixa. (2 pontos)
juntas, George, elos rígidos, móveis, corrente, mecanismo, fixo, entrada, saídas, polias.
Uma ligação é uma série de ........................................ conectado com ........................................ para fechar ou abrir um ........................................ (ou uma série deles). Uma ligação é chamada de ............................. ........... se tiver dois ou mais rígidos links que se movem em relação a um ........................................ elo rígido. Para que um mecanismo funcione, precisamos aplicar uma força ou colocar em movimento um determinado ponto, que é chamado de ........................................ , que causará outro ponto do mecanismo para mover ou produzir uma força, chamada ........................................ .
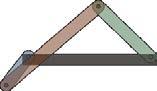
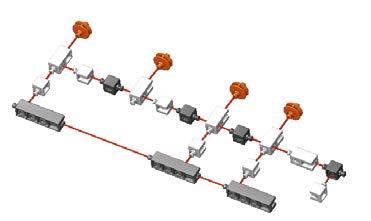
Exercício 9: No diagrama seguinte de um pantógrafo, se o lápis for colocado no ponto C e o rastreador no ponto D, quantas vezes maior será a imagem copiada que a original? (2 pontos)
Distâncias: AB=40cm AO=10cm
BC=40cm BR=10cm
Exercício 10: Se invertermos o rastreador e o lápis no diagrama acima (lápis no ponto D e rastreador no ponto C), quantas vezes menor será a imagem copiada do que a original? Mostre seus cálculos (2 pontos)
7
A B C D O R
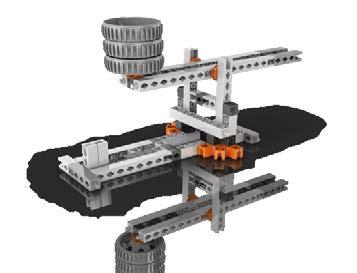
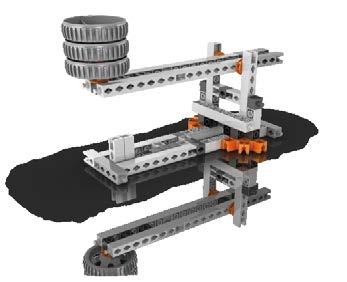
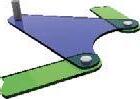
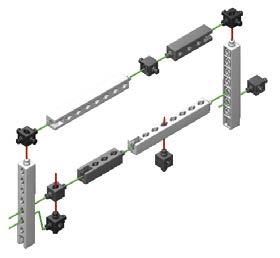
Lição 9: Cabine móvel
A primeira lei do movimento de Newton

O engenhoso matemático e psicanalista inglês Sir Isaac Newton (1642 -1727) foi o primeiro a compreender completamente um movimento na verdade, expressando suas três famosas leis de movimento. Por esta e outras descobertas é reconhecido como um dos cientistas mais influentes de todos os tempos.
Vamos aprender:
» Como uma força causa movimento.
» Qual é a primeira lei do movimento de Newton.
10076
Procedimento:
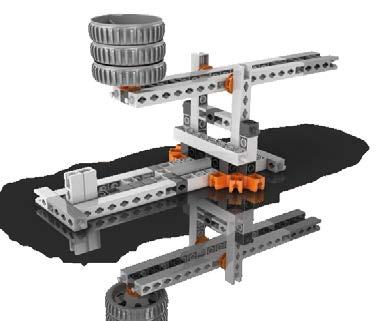
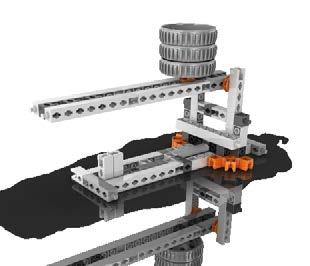
1 Construa o modelo de cabine móvel


2 Coloque o modelo em uma superfície plana. Obviamente que não se move sozinho. Explique o porquê no exercício 1
3 Coloque a cabine no meio e mova o seu veículo sem problemas, segurando-o pela borda maior. Observe como a cabine se move e responda o exercício 2.
4 Mantenha a cabine no meio e empurre o veículo bruscamente desta vez. Observe novamente como a cabine se move e responda o exercício 3
5 Para o teste final, você está imitando um acidente. Coloque a cabine na borda e empurre o veículo bruscamente da haste grande em uma parede ou qualquer outro obstáculo forte. Cuidado para não forçar demais e ter peças voando, pois há risco de lesão! Certifique-se de pegar as peças que caem. Escreva suas observações sobre o veículo e a cabine movida no exercício 4
6 Leia atentamente a primeira lei de movimento de Newton à direita e explique todas as suas entradas de acordo com ela sobre o movimento da cabine no exercício 5.
Exercícios:
Exercício 1: Explique por que o modelo fica parado na etapa 2 do experimento em referência à soma das forças aplicadas.
Exercício 2: Quando o modelo está se movendo suavemente na etapa 3, como a cabine se move? Desenhe a soma de forças na figura abaixo.
colocar cabine no meio F
veículo de movimentação de haste grande
Exercício 3: Quando o modelo é empurrado bruscamente na etapa 4, a cabine se move?
Exercício 4: O que acontece com o veículo quando você o empurra para a parede no passo 5? Como a cabine se move desta vez?
Exercício 5: Leia a primeira lei de movimento de Newton e comente sobre o movimento da cabine nas etapas 2, 3, 4 e 5.
A primeira lei de Newton: “Todo objeto permanece em repouso ou continua a se mover a uma velocidade, por uma força externa".
Empurre o modelo contra uma parede e observe o movimento da cabine.
2








3 Créditos: Engino-Net Limited 2023 x 2 01 03 02




4
x 2 03 x 4 04 10
Créditos: Engino-Net Limited 2023
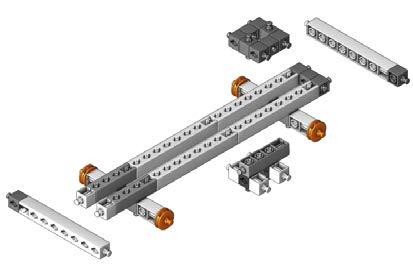
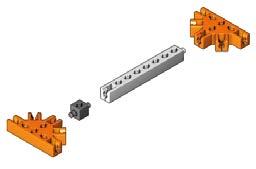
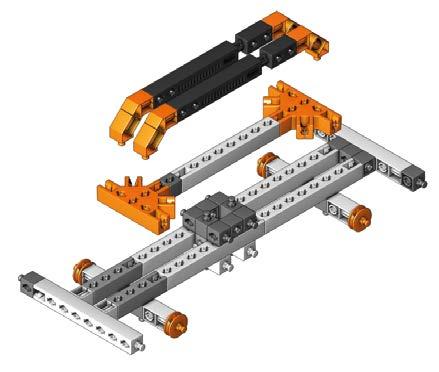
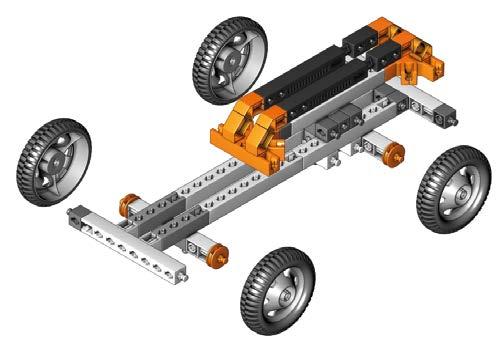
Unidade 3: Aulas de robótica (E40.1)


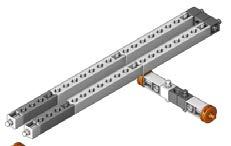
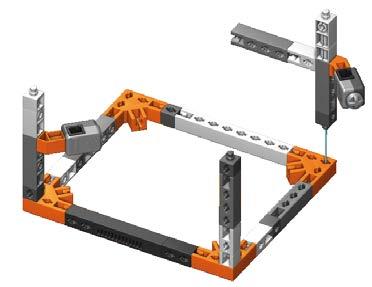
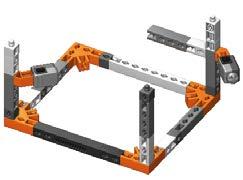
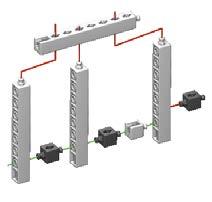
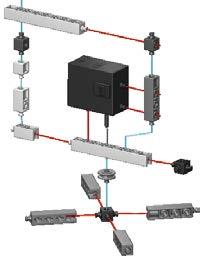
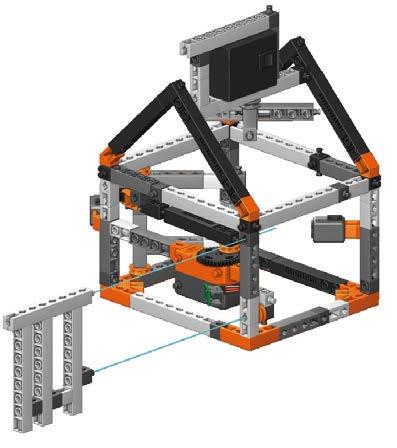
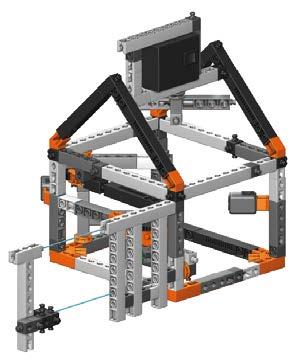
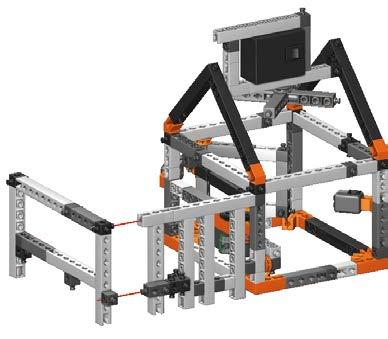
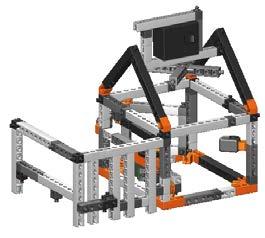
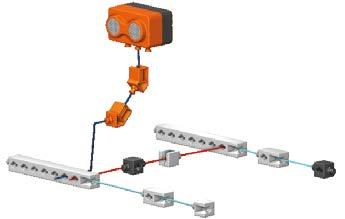
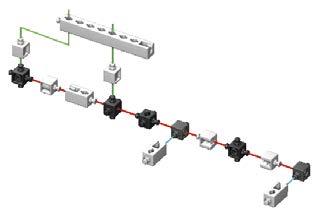
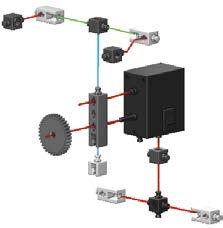
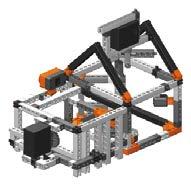
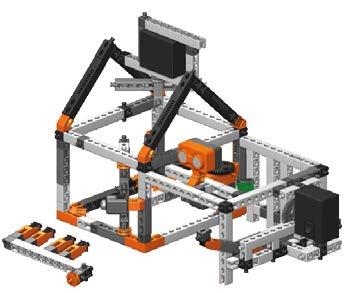
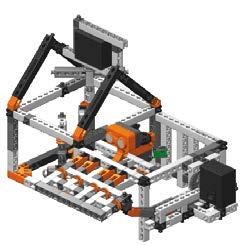
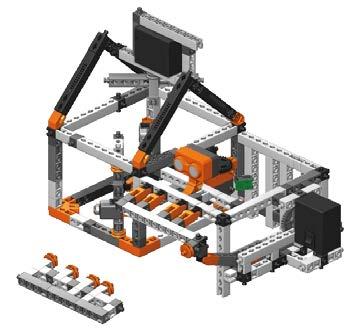
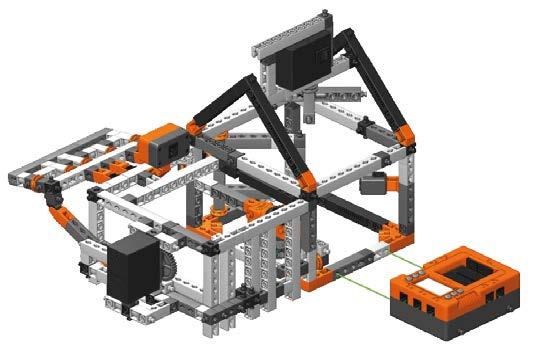
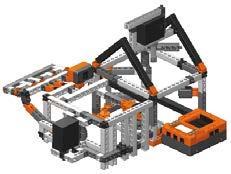
Lição 1: Casa Motorizada
Saídas - Motor CC, Servo Motor e campainha

Motores e servomecanismos são as saídas mais comuns em um robô. Eles podem dar movimento ao próprio robô ou alterar a posição de suas partes móveis. Outro tipo comum de saída é a campainha que emite sinais sonoros. Aprenda a comandar saídas usando o diagrama de fluxo e desbloqueie as habilidades de programação!
Vamos aprender:
» Como o motor DC e um servo motor funcionam.
» Blocos de ação de saída e suas propriedades.
» Como programar usando o diagrama de fluxo.
Materiais Necessários:
» Engino® STEM & Robotics PRODUINO.
» PC ou dispositivo inteligente com software KEIROTM instalado.
30003
Procedimento:
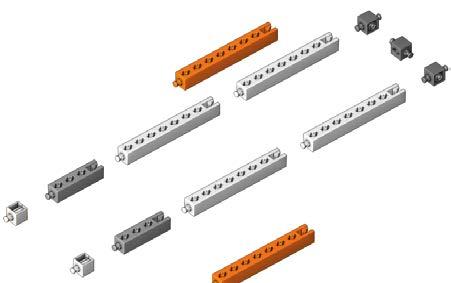
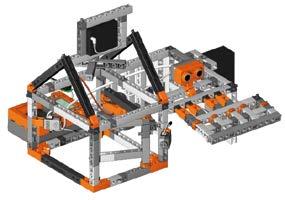
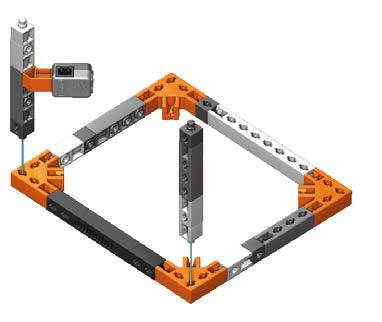
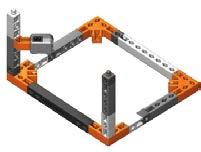
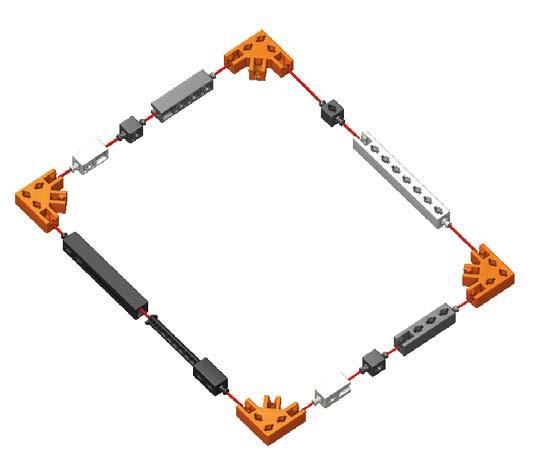
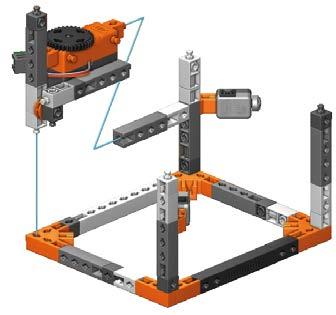
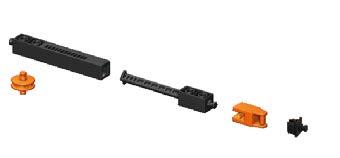
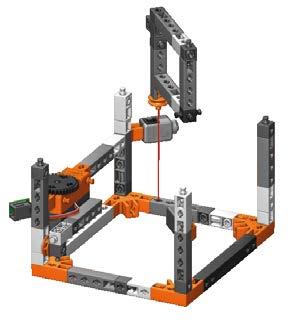
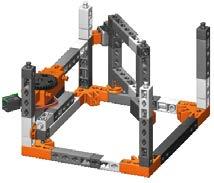
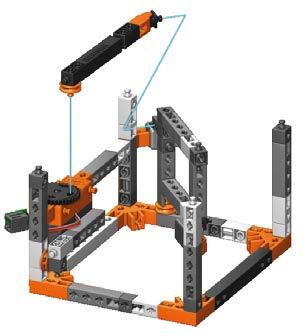
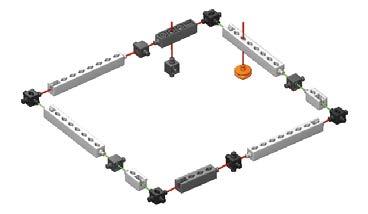
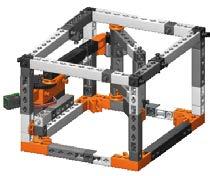
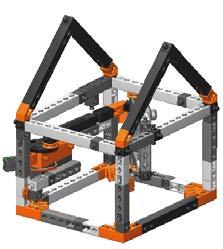
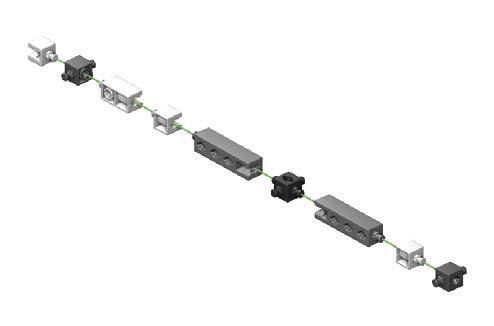
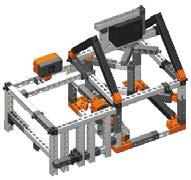
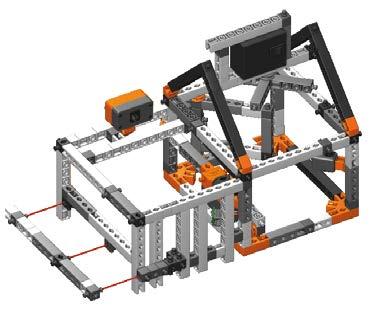
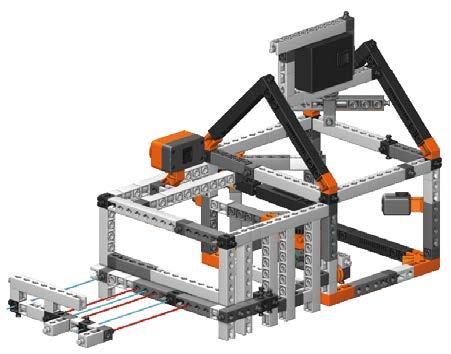
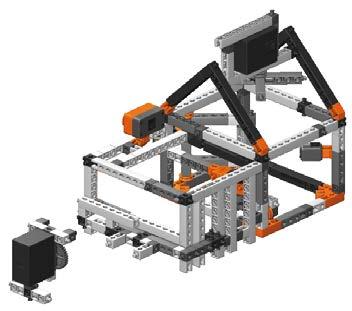
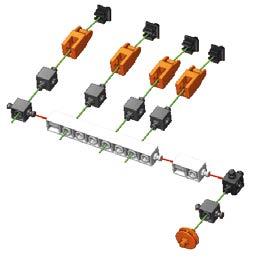
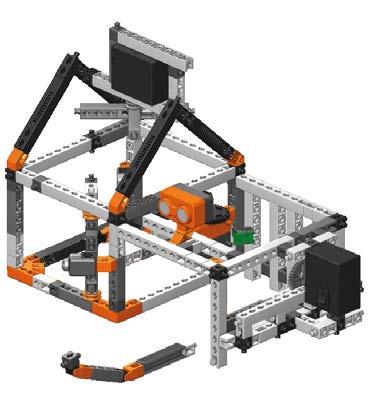
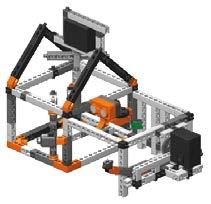
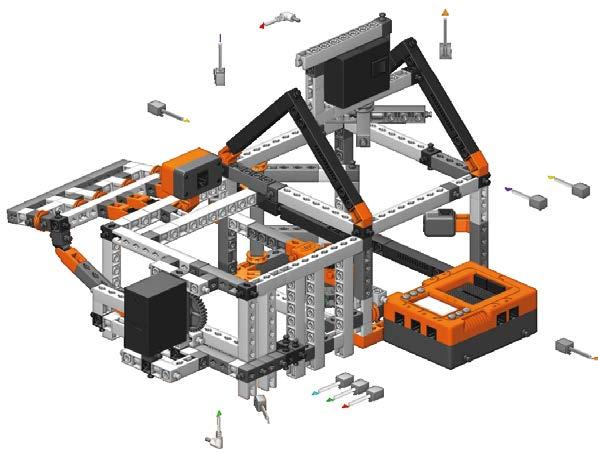
1 Encontre as etapas de construção na seção “Colocando em Prática” para construir o modelo de casa de alta tecnologia
2 Ligue o controlador Produino e conecte-o a um PC através do cabo USB. Abra o software KEIROTM e conecte os dois Dispositivos clicando no botão Apropriado. Seguir exercício 1 para configurar o simulador.

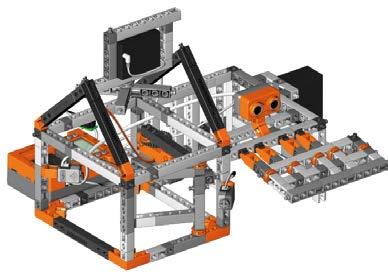
3 A porta da garagem está aberta e espera por um carro para ser estacionado dentro! Leia o exercício 2 para aprender como operar a porta da garagem. Então, envie o programa para o controlador e teste a precisão do programa usando o menu da tela LCD.
4 Clique no ícone apropriado na barra de menu para salvar o programa no PC.
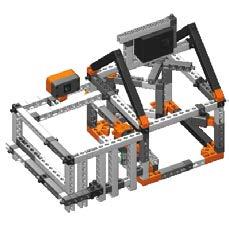
5 O servo motor funciona de forma diferente em comparação com o motor DC. Ele gira em graus, completando um semicírculo de 180º. Faça o programa do exercício 3 e descubra como abre e fecha a porta de casa com um servo motor.
6 Até agora você usou a maior parte dos blocos de saída. Leia o exercício 4 para ter uma visão geral das propriedades disponíveis que podem afetar o funcionamento de uma saída.
Exercícios:
Exercício 1: Expanda o painel do simulador e atribua as portas aos periféricos conectados, conforme aparecem em seu modelo. Arraste e solte os blocos de ícones apropriados nas portas.
Exercício 2: Arraste e solte os blocos logo abaixo do bloco “Iniciar” no diagrama de fluxo, e obtenha a seguinte programação:
» porta da garagem fecha;
» em seguida, o buzzer emite um sinal sonoro C5 por 1 segundo;
» a porta se abre novamente;
» e, por fim, a campainha emite um som.
Dica:
Examine as propriedades dos blocos de ação e ajuste eles para conseguir isso. Além disso, experimente o tempo de duração e/ ou velocidade do motor para obter um ajuste fino da porta.
Exercício 3: Arraste e solte os blocos de ação necessários no diagrama de fluxo para criar a seguinte sequência de comandos:
» porta fecha-se e ouve-se um sinal sonoro durante 0,5 segundos;
» então, a porta se abre amplamente;
» a porta permanece aberta por 3 segundos;
» e finalmente a porta se fecha.
Dica:
O servo motor tem um limite superior finito na velocidade de rotação para rotação, visando assegurar sua precisão e segurança. Assim, encurtar a duração além desse limite pode não levar ao resultado desejado.
Exercício 4: Coloque um visto () nas células da tabela para indicar quais variáveis estão disponíveis para cada uma das seguintes saídas.
4
Propriedades Saídas porta status direção velocidade ângulo nota musical frequência atraso duração sequência 180o
Casa de alta tecnologia Engino®


5 Créditos: Engino-Net Limited 2023 01 10
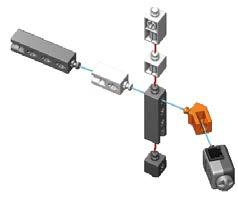
IR SENSOR

6
Limited 2023 01 02 01 03 01 SENSOR TOUCH
Créditos: Engino-Net


7 Créditos: Engino-Net Limited 2023 03 04 11



8 Créditos: Engino-Net Limited 2023 01 07 05 06 x 2 13 13



9 Créditos: Engino-Net Limited 2023 07


10 01 10

11 Créditos: Engino-Net Limited 2023 SENSOR ULTRASSÔNICO 11

12
Créditos: Engino-Net Limited 2023
Médio


13 Créditos: Engino-Net Limited 2023 01 17
14
2023 01 19 17
Créditos: Engino-Net Limited
15
Engino-Net Limited 2023
Créditos:
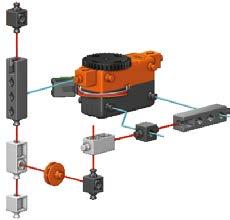
A
B
ULTRASSÔNICO 4
SENSOR TOUCH 3 A MOTOR
SENSOR TOUCH 3
ULTRASSÔNICO 4
C
MOTOR MOTOR B
MOTOR SERVO C MOTOR SERVO
MOTOR SENSOR IR 1
19
SENSOR IR 1