
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 06 | Jun 2024 www.irjet.net p-ISSN:2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 06 | Jun 2024 www.irjet.net p-ISSN:2395-0072
Muhammed Mahshook Ali P1, Sooraj P2, Sam Babu3 , Shijina B4, Safna Sainudeen5
1-3BTECH UG Students, Department of Computer Science and Engineering, TOMS college of Engineering
4Head of the department, computer science and engineering, TOMS college of Engineering
5Assistant professor, computer science and engineering, TOMS college of Engineering3 APJ Abdul Kalam Technological University, Kerala, India
Abstract - In developing nations, effectively managing urban solid waste is a significant task that poses considerablehealthhazardsanddegradestheenvironment. Because of inadequate collection techniques, unsanitary workingconditionsforhumanlabor,andwaste, thecurrent system does not provide adequate coverage. The Neighborhood Navigator idea seems like a good way to address these issues. Fundamentally, Neighborhood Navigators transforms garbage management by utilizing both contemporary and basic technologies. Data-driven decision-making is made possible by an intelligent robot that continuously checks trash volume using a mix of sensorsandwastesystemswithvolumesensingcapabilities. This technology improves productivity insights for efficient resource allocation and process optimization, and it integrates seamlessly with both Android and iOS applications. robots that follow lines and use waste series growth methods. Outfitted with advanced sensing and navigational technologies, those Robots follow predefined paths,ensuringthattrashiscollectedproperlyandaddedto a main series point so that it can be disposed of with ease. This all-encompassing approach ensures efficient waste management in emerging nations, resulting in sustainable urbangrowth
Key Words: Urban solid waste management, Developing countries, Neighborhood Navigator, Intelligent robot, Sensor technology, Volume sensing
Controlling municipal solid trash is an urgent problem in many developing nations due to unhygienic conditions anddetrimentalenvironmentaleffects.Thepresentwaste management systems are often plagued by inadequate insurance and poor collecting techniques. Line-following robot integration with the Neighbourhood Navigator gadget has emerged as a viable way to address such difficulties. Outfitted with cutting-edge sensors and a Proportional-Integral-Derivative (PID) algorithm, those robots effectively augment the Neighbourhood Navigator systemandoptimizerubbishcollectingstrategies.
Autonomously navigating specific routes, line-following robots provide effective garbage management and
comprehensive neighborhood coverage. Their sophisticated sensors enable accurate garbage placement anddetection, ensuring that no area isoverlooked for the course of the series. These robots travel routes using the PIDsetofrulestoprovidetheoptimalmanage.
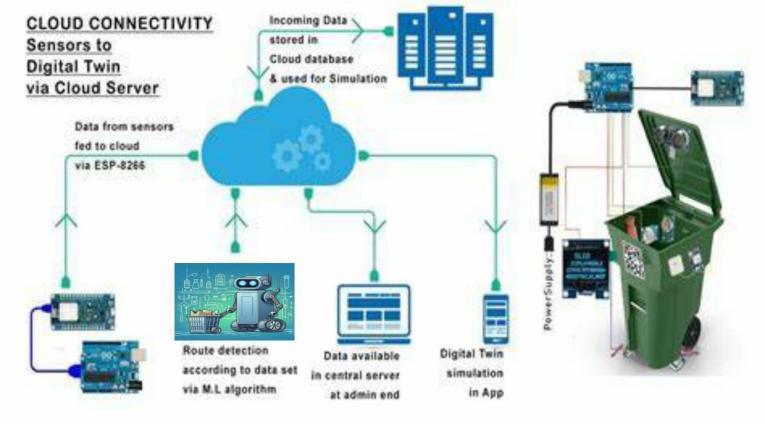
The monitoring program continuously monitors waste stages by using high-precision sensors installed in trash cansacrossthearea.Thesesensors,whichprovideprecise dataatthebins'filllevel,canbeinfraredorultrasonic.The sensors'collecteddata issentto the monitoringsoftware, which is then easily integrated into an Android platform foreasyaccessbyusers.Thetoolprovidesreal-timetrash degrees, series schedules, and operational insights to waste control agencies and citizens. Furthermore, the application offers real-time indications and notifications for strategically placed interventions, such as scheduling wastecollectionswhentrashcansarefilled.
Further characteristics and functionality of smart waste bins:
1.2.1
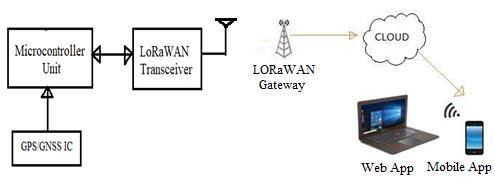
High precision sensors (ultrasonic or weight sensors) are installed in smart waste bins that enable monitoring of real-time status of waste levels. These sensors directly show the capacity of the packing containers and transmit data wirelessly to the core monitoring system, similar to, Wi-FiandLoRaWAN.
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 06 | Jun 2024 www.irjet.net p-ISSN:2395-0072
1.2.2 Determining the Position for Robotic Interaction:
Line follower robots, with these types of sensors, are easily detected by the function detection sensors embedded in an intelligent garbage receptacle. Upon an approaching of a bin by a robot for a garbage collection, position-detectingsensorsinthebingetactivatedtoopen up some channels where the robot and the bin could speak. This line-up eliminates interfence between the robotsandbinpreventingdelayinwasteseries.
1.3 Functions of the Android Application:
1.3.1 Real-time Data Indications:
TheAndroidappprovidesreal-timewastestageindicators in monitored boxes. Viewers can examine each bin's current fill level while making proactive waste managementdecisions.
1.3.2 Triggering Robot Actions:-
Thesoftwarecausestheassociatedline-followingrobotto collect waste when a bin reaches a predetermined fill level.This automation prevents overflow and guarantees timelywastecollection.
1.3.3 Android Application Operates
Intelligent garbage bins provide real-time data to the utility that shows their fill levels. The program sets off waste series actions for line-following robots based on pre-established thresholds. The application allows users toexaminetrashstages,seriesschedules,andoperational insights in real time. Users include residents and waste controlgovernmentofficials.
When bins reach capacity, customers receive real-time indicators and messages, enabling prompt interventions likewastepickupscheduling.
1.4 Precise Navigation with the PID Algorithm: 1.4.1 Details and Operation:
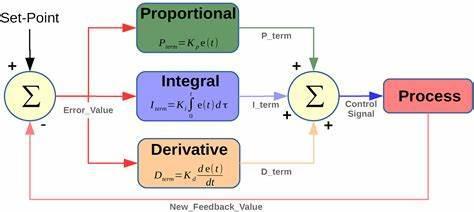
The PID (Proportional-Integral-Derivative) algorithm is usedtoensurethattheline-followingrobotsarecorrectly navigating along predetermined pathways. Three parts makeupthealgorithm:
Control by Proportion (P):
Determines the difference between the robot's preferred (middle-of-the-road)andcutting-edgeroles.Ascertainsthe necessary modification to bring the robot into line with thepredeterminedroute.
Total Control (I): Amasses inaccuracies over time and modifies the robot's motion to maintain exact alignment with the intended course, even in the face of persistent deviances.
Derivative Control (D):Preventstheroboticvehiclefrom going off course by figuring out how much to correct the errorandmodifyingthevehicle'spathaccordingly
1.4.2 How the Line-following Trash Collecting Robot's PID Algorithm Operates
Line Detection
The robotic sensors continually assess the distance between the line and the surrounding surface. The PID algorithmemploysastrategybasedonsensorinformation toaccuratelyidentifyandnavigatetheroad.
Correction and Error Calculation
Theproportionalproblemcomputestheerror,figuringout how much the robot needs to display in order to realign itselfwiththepredeterminedcourse.
Therobotcorrectsitsroutebasedontheseerrors,andthe integralproblemguaranteesuniquealignmenteveninthe presenceofconsistentdeviations.
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 06 | Jun 2024 www.irjet.net p-ISSN:2395-0072
The PID algorithm incorporates obstacle avoidance techniques. - In the event that the robotics' sensors identifyanobstructioninitsroute,thesetofrules
2. Accurate Guidance through the Use of the PID Algorithm
The PID (Proportional-Integral-Derivative) algorithm is the foundation of achieving the physical follow of prespecified paths by the line-following robots. This algorithm incorporates three main components: This algorithmincorporatesthreemaincomponents:
Proportional Control (P) determines the amount of correctionneededtoensurethattherobotreturnsbackto therightpathviacalculationofthedeviationbetweenthe right path and the position of the robot. Integral Control (I) sums the error at each trial, thereby eliminating systematicbiassincearobotisexpectedtobeofftrackbut will persist in correcting the deviation from the desired path. Derivative Control (D) anticipates further mistakes depending on the existing rate of error increase so as not tojostlearoundthepathorgooveritasseeninthisvideo byaimingtomodulatetheroboticpathoftherover.
2. 2 How does the PID algorithm that propels the LineFollowing Trash Collecting Robot work?
Equipped with line detection sensors, the distance of the linetothesurroundingsurfaceisconstantlyevaluatedand gathered data are used to control the PID algorithm relatingtotherobot’strajectory.
This algorithm operates by Calculating and adjusting for deviations: The proportional component is calculated to give the error which in this case refers to how far off the robot is from the set path. The integral component then worksonthecorrectiveofmostminorpositionalmistakes which have been accumulated over time hence ensuring that the point of the robot is well aligned regardless of consistent mishits. This process is further facilitated by the derivative component that estimates further deviationsfromtheidealpathbasedonthecurrentrateof change of the error and thus makes the movement of the robotmoregradualandnotjerky.
Incorporating obstacle avoidance: Pulsewidth modulation is used in the PID algorithm to clear any obstacle, which makestheprocesscontinuous.Asaresult,whenanobject isperceivedbytherobot’ssensorstobeinthepathofthe robot, the algorithm is used to determine the extent of deviation from this path and at the same time, the robot would attempt to stay as close as possible to the predefined path when deviating. This capability of the vehicleisjustnecessarywithaviewtomovementinthose
areas where possibility of coming across some barriers is ratherhigh.
In the initial pilot phase, the focus is on testing and
refining the system in a controlled environment: In the initial pilot phase, the focus is on testing and refining the systeminacontrolledenvironment:
Selecting a small urban area: Stakeholders must implementtheminagood-sizedurbanarea,althoughthey will be tracking performance and correcting any difficulties that arise. Deploying a limited number of linefollowing robots and smart bins: The implementation phase should first begin with a pilot project in order to assess its operational effectiveness as well as encounter technological challenges that may occur. Training local workers and residents: Ensure integration of training programs that will enable stakeholders master how to effectivelyusethesystemandhowbesttogetthemostout of the system in terms of functionality and usability. Collecting data and feedback: Currently, the pilot phase is feasible and should be used to gain considerable perceptions of the overall performance and reactions of thelearners to thesystemandalteration needs. This data willbeparticularlyusefulduringthenextimplementation phases and in the process of implementing new system modifications.
Building upon successful outcomes from the pilot phase, the scale-up phase involves expanding the system's coverage and capabilities: Building upon successful outcomesfromthepilotphase,thescale-upphaseinvolves expandingthesystem'scoverageandcapabilities:
Gradual expansion to larger areas: Expand the system acrossthelocalizedareasofthelargercity,makingsureto bringintoaccountlessonsthatwerelearnedfromthepilot stage in order to make the expansion more effective. Increasing the number of robots and smart bins: Increase more the number of deployed hardware to match the expanded area of coverage and thus increase the number of wastes collected. Continuous monitoring and improvement: To achieve constant enhancing of the performance and utility of the system, perform updates andadjustmentsweekly,monthly,andasneededbasedon monitoring and review of the overall results as well as users’reactionsandperceptions.
In the final full-scale implementation phase, the goal is to achieve comprehensive waste management coverage
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 06 | Jun 2024 www.irjet.net p-ISSN:2395-0072
across the entire city: In the final full-scale implementation phase, the goal is to achieve comprehensive waste management coverage across the entirecity:
City-wide deployment: Extend it to other cities across the country to facilitate optimal waste management and to embrace solutions for urban solid waste issues. Establishing maintenance and support infrastructure: Design clear guidelines for maintenance and long-term support, so that the system will remain functional and could be used for many years. Regular technology and processupdates:Ensurethatyouupdateyourselfwiththe available technological trends and practices as well as higher standards in waste management to ensure the sophisticated systems are effective, sustainable, and can effectivelyfitintheever-changingworld.
Line-following robots offer numerous advantages for urban waste management systems: Line-following robots offer numerous advantages for urban waste management systems:
Enhanced Efficiency: These robots plan the best time and fuelefficientroutestopickingupwasteduringthedayand nightandtomovebetweendifferentareaswithinaregion especially after avoiding trafficked areas with narrow streets. Improved Sanitation and Health: Reducing direct physical contact with the waste, the robots mean a decrease in potential health risks to workers and individualswithinthecommunity.TimelyCollection:They help to dispose wastes with time to avoid over-filling of bins and therefore keep our neighborhoods’ environs cleanasthiswillhelpfightdiseasesaswellasenhancethe general hygiene. Environmental Sustainability: With the capability to carry much smaller loads, line-following robotsaremoreenvironmentallyfriendlythanmostwaste collection vehicles. Waste Reduction: By constantly running surveillance and analysis of the Waste Bin data, these robots ensure that proper waste management and reduction techniques are and are enforced meaning improved resource utilization. Community Engagement: Other functionalities like mobile apps allow organizations tobookwastecollectionservices,givefeedbackaswell as be encouraged on common recycling programs hence engagementoftheresidentsinefficientuseoftheservices.
5. Challenges and Considerations
Implementing line-following robots for waste management systems involves addressing various challenges and considerations: Implementing linefollowing robots for waste management systems involves addressingvariouschallengesandconsiderations:
InfrastructureDevelopment:Theuseofrobotictechnology for sorting, procurement, and smart bins as well as other supporting structures involves high initial costs for the process. Maintenance: Some of the maintenance activities include cleaning the robots and sensors; charging the batteries of the robots and sensors; cleaning and refilling the smart bins; identifying and replacing faulty parts; lubricating moving parts; performing software updates; recalibrating the robots and sensors; and monitoring the health of the robots and sensors. Technology Adoption: There is a need to offer training sessions, targeting both workersinthemunicipalestablishmentsandthepopulace to impart knowledge on the new technologies and interfaces. Digital Literacy: This involves developing the abilityof everystakeholder whowouldbeinvolvedinthe treemanagementsystemtopossesscertainlevelofdigital literacy in handling mobile applications and other technology elements in the system. Regulatory and Safety Issues: Challenges are still associated with airspace regulation, privacy, and safety regulation from local and national authorities on the use of robotic waste managementsystemsaswellasobservingthelawsonthe use of airspace. Data Management: Protecting the individualdatagainedthroughtheemploymentofsensors andsmartapplicationsaswellasensuringtheefficientuse of analytical data in decision-making an system enhancement. Scalability: Whenever a large scale implementationof thesystemisto be done, pilot projects areimportantsinceitallowstestingofthefunctionalityof thesysteminareasoffairlysmallextentbeforeimproving ittocater for larger regions.Adapting the technologies to beincorporatedintodifferenturbansettingaswellasthe demographiccharacteristicsoftheinhabitants.
6. Future Implementation: Bring in Drones to pick up waste and other garbage.
There is thus a promising vision of involving drones into urban waste management to improve the results and better control problem of reaching some spots in the densely populated cities. Closely related, drone surveys’ advantage is that they have capabilities that are different fromandcomplementarytoground-basedoperations,and dronescanquicklymoveabout.
Drones bring several key advantages to waste collection: Dronesbringseveralkeyadvantagestowastecollection:
Accessibility: Drones are capable of providing aerial view of events, targets or operation scenes such that they can reach areas that may be inaccessible to ground vehicles due to a variety of reasons including but not limited to high buildings such congested city centers or areas with poor access road networks. It also guarantees that the
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 06 | Jun 2024 www.irjet.net p-ISSN:2395-0072
waste collection can penetrate and compensate the aspiredcoverageareainthecity.
Speed and Efficiency: The mobility acquired by drones flying at the area above the ground allows them to avoid most traffic jams, provided necessitating waste collection service More over quick service is much required in the emergency situations. These speediness will enhance the internalfunctioningoftheorganizationandthetimetaken todeliveritsserviceswillbeminimal.
Flexibility: Drone collection is more flexible than groundbased collection being able to be called upon in emergencies or at any time of the day to collect large amounts of waste. It helps them choose flexible routes depending on the real-time information that can be appliedtocollectionschedulesandresources.
Modern drone technology is equipped with advanced features tailored for efficient waste management: Modern drone technology is equipped with advanced features tailoredforefficientwastemanagement:
Payload Capacity: Drones are meant to be capable of handling relatively small to moderate sized waste bins thatcan be usedto pick up waste. Theyhave thecapacity to manage the usual flow of wastes in urban areas hence areuseful.
Navigation and Obstacle Avoidance: Real time GPS navigation helps in controlling the motion of the drones while given obstacle avoidance helps in making sure that drones get to avoid various obstacles when flying within urban areas. They are capable of, for instance, identifying and prevent hindrances, and fly along GP Maps to the targetsamplingpointswithandhighaccuracy.
Integration with Smart Bins: It can communicate with Smart bins which are the bins that possess sensors and evenhavecommunicatingplatforms.Theygetinformation about fill level of bins in real time, facilitating correct organization of collection routes or schedules. This integration optimises operations by enabling collectors to visit targeted areas frequently to avoid wasting time in otherplaces.
To successfully integrate drones into waste management systems, several critical steps must be taken: To successfully integrate drones into waste management systems,severalcriticalstepsmustbetaken:
Pilot Testing: Carry out feasibility and risk assessment by conductingsmallscaled,closelymonitoredandcontrolled trial flights for performance evaluation and trial implementation.
Regulatory Compliance: Secure the appropriate legal licences and permissions for flying drones in the city airspace.Theselawsprotectthepeopleandpropertieson the ground during operation as well as workings within legalprovisionsontheuseofdrones.
Training and Safety Protocols: Ensure that the holders of drone operator licenses and maintenance crews are adequately trained. Set up standard safety measures to avert operational challenges and to ensure protection of thepublicinthecourseoftheirundertaking.
DataIntegrationandManagement:Meshthedataobtained from the use of drones with the central management systems for rational waste disposal and management. Applyingdataanalyticssuchastheroutestakentocollect volumeandtheabilitytopredictthevolumesgeneratedto improvetheefficiencyofthesystem.
Integratingdronesintourbanwastemanagementsystems presents several challenges and considerations: Integratingdronesintourbanwastemanagementsystems presentsseveralchallengesandconsiderations:
Regulatory Hurdles: The airspace rules and applying for permission to fly drones in different locations can be daunting, and this will cost a lot of time. Another important aspect is the following legal requirements such Europe’sprivacylawsorenvironmentalprotectionlaws.
SafetyConcerns:Appropriatemeasuresneedtobeinplace to guarantee that drones can navigate through infrastructuralareaseffectively,especiallywithincomplex urban settings. Managing risks such as the risk to public from collisions with drone aircrafts, noise pollution, and invasion of privacy are critical factors that the public and regulatorybodiesconsiderforusageandapproval.
Weather Dependency: Volatile factors of the environment caninfluence drone operations notably by factors such as wind, rain, or fog. Snow and ice accumulation can make rehearingandcollectiontasksdifficulttoaccomplish;thus, the existence of contingency plans and fallback processes guarantees continued provision of waste collection services.
Looking ahead, the future of drone integration in waste management holds promising opportunities for further advancement: Looking ahead, the future of drone integration in waste management holds promising opportunitiesforfurtheradvancement:
AdvancedAutomation:Itisalsopossibletoupgradedrone autonomyanddecision-makingprocessesusingAIandML algorithms.Itwillalsoleadtothepossibilitywheredrones
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 06 | Jun 2024 www.irjet.net p-ISSN:2395-0072
willbeabletofulfilhigherleveltasksmoreindependently, with abilities such as; dynamic path planning and proactivemaintenance.
Expanded Capabilities: Future development will enable the specialized use of drones by increasing their carrying capacities for more massive volumes of waste, as well as coping with a wider range of application issues. Better battery utilization, the charging times, and the reliability of the batteries will also enhance the drone efficiency in thecitylandscape.
GlobalImplementation:Thetransitionofbestpracticesfor initiatingtheuseofdronesfrompilotcitiestoothercities across the globe will therefore always present some considerable challenges in terms of regulatory environments,infrastructureandtechnologiesofhandling waste. Multifaceted partnerships between municipalities, technologists in the tech industry, and legislative authorities will define the global acceptance of drones for the sustainable management of waste in smart urban environments.
7. CONCLUSIONS
Ultimately, Advanced Generation Information's usage of the Community Navigator device in conjunction with NeighborhoodNavigatorandline-followingrobotsoffersa revolutionary solution to the problems associated with intricate urban waste management in international space expansion.Thisintegratedmethodoffersaframework for approaching sustainable urban development by utilizing the benefits of a well-developed selection process. Monitoring waste volume in real time and seamlessly integrating with mobile systems offer insightful information to enhance overall operational effectiveness for the effective distribution of helpful resources. In additiontorobotics,autonomouswirelesscommunication guarantees an appropriate waste chain, lowers environmental contamination, and facilitates simple compliance with waste management. Monitoring waste volume in real time and seamlessly integrating with mobile systems offer insightful information to enhance overall operational effectiveness for the effective distributionofhelpful resources.Movingbeyondrobotics, autonomous wirelessguarantees an appropriate waste chain, lowers pollution to the environment, and makes waste management simple to follow By utilizing Neighborhood Navigators and line-following robots, businesses may reduce health risks, improve the environment and quality of life, and reduce waste completely.Astimegoeson,learningandeffortwillbeput to use, and this could help achieve global sustainability goals.
The task has been successfully completed, and I am very appreciative to God Almighty for his grace and blessings, withoutwhichthisstudywouldnothavebeenpossible.
[1] S. D. Sonali, S. Pushpa, Y. Piyush, K. S. Krishna, "Household Management System Using IoT and Machine Learning," in Proceedings of International Conference on Computational Intelligence and Data Science(ICCIDS2019),2020.
[2] H.C.S.Zainal,A.A.H.Mohamad,A.C.A.Syahrul,A.S. Mohd, "Smart Waste Collection Monitoring and Alert SystemviaIoT,"in ProceedingsofIEEE9thSymposium on Computer Applications & Industrial Electronics (ISCAIE),2019.
[3] Pembuangan Sampah Negara Meningkat 100.75 Peratus. [Online]. Available: https://www.bharian.com.my/berita/nasional/202 0/01/643354/
[4] S.V.Kumar,T.S.Kumaran,A.K.Kumar,M.Mathapati, "Smart garbage monitoring and clearance system using Internet of things," in 2017 IEEE International ConferenceonSmartTechnologiesandManagementof Computing, Communication, Controls, Energy and Materials(ICSTM),2017.
[5] P. Kumaresan, G. Priya, B. R. Kavitha, G. Ramya, M. LawanyaShri,"CaseStudy:ALineFollowingRobotfor Hospital Management," International Journal of Pure and Applied Ma· · T. A. Tariq, I. Muhammad, S. A. Abdullah, G. Adam, "IoT-Based Smart Waste Bin Monitoring and Municipal Solid Waste Management System for Smart Cities," Computer Engineering and ComputerScience,2019.
[6] A. H. Ismail, A. A. Zaman, and K. Terashima, "Fuzzy logicapproachforline following mobile robot using an array of digital sensors," InternationalJournal of Application or Innovation in Engineering & Management,pp.108-115,2016.
[7] A. A. Neloy, A. Arman, M. S. Islam, T. Motahar, "Automated Mobile Robot with RFID Scanner and SelfObstacleAvoidingSystem," InternationalJournal ofPureandAppliedMathematics,vol.118,no.18,pp. 3139-3150,2018.
[8] J.M.U.Aguila,H.S.Dimayuga,K.O.F. WasteBinwith IntegratedVolumeandWeightSensor,"in 2019IEEE 11th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 06 | Jun 2024 www.irjet.net p-ISSN:2395-0072
Management (HNICEM), Laoag, Philippines, 2019, pp.1-5.
[9] J.Ren,K.A.McIsaac,andR.V.Patel,"Afastalgorithm for moving obstacle avoidance for vision- based mobile robots," in Control Applications, 2005, CCA 2005, Proceedings of 2005 IEEE Conference on, Toronto,Ont.,Canada,2005.
[10] X. Yang, M. Moallem, and R. V. Patel, "A SensorBased Navigation Algorithm for a Mobile Robot Using Fuzzy Logic," International Journal of Robotics and Automation, vol. 21, no. 2, pp. 129140,2006.
[11] M.-S.ChangandJ.-H.Chou,"ANovelMachineVisionBased Mobile Robot Navigation System in an Unknown Environment," International Journal of RoboticsandAutomation, vol.25, no. 4, pp. 344-351, April2010.
[12] S. Kumar Das and M. K. Pasan, "Design and Methodology of Automated Guided Vehicle-A Review," Journal of Mechanical and Civil Engineering (IOSR-JMCE), e-ISSN: 2278-1684, p-ISSN: 2320–334X.
[13] V. Hymavathi, G. Vijay Kumar, "Design and implementation of double line follower robot," International Journal of Engineering Science and Technology,vol.3,2011,pp.4953-4957.
[14] S. M. Sahil, W. Sagar, W. Preeti, J. Richard, "IoT Enabled Dustbins," in Proceedings of International ConferenceonBigData,IoTandDataScience(BID), VishwakarmaInstituteofTechnology,2017.
[15] ParkashandV.Prabu,"IOTbasedwastemanagement for smart city," International Journal Research ComputerandCommunicationEngineering,vol.4,no. 2,2016.
[16] A. Omran, A. Mahmood, and H. A. Aziz, "Current practice of solid waste management in Malaysia and its disposal," Environmental Engineering Management Journal, vol. 6, no. 4, pp. 295–300, 2007.
[17] R.IssacandM.Akshai,"SVASTHA:Aneffectivesolid waste management system for Thiruvalla Municipality in Android OS," in 2013 IEEE Global Humanitarian Technology Conference: South Asia Satellite (GHTC-SAS), Trivandrum, 2013, pp. 254259.
[18] F. Folianto, Y. S. Low, W. L. Yeow, "Smartbin: Smart Waste Management System," in 2015 IEEE 10th International Conference on Intelligent Sensors,
Sensor Networks and Information Processing (ISSNIP),2015.
[19] G. Eason, B. Noble, I. N. Sneddon, "On certain integrals of Lipschitz-Hankel type involving products of Bessel functions," Philosophical TransactionsoftheRoyalSocietyofLondon.SeriesA, Mathematical and Physical Sciences, vol. A247, pp. 529–551,April1955.



MuhammedMahshookAliP Student
TOMS college of Engineering
APJ Abdul Kalam Technological University
SamBabu Student
TOMS college of Engineering
APJ Abdul Kalam Technological University
SoorajP Student
TOMS college of Engineering
APJ Abdul Kalam Technological University
© 2024, IRJET | Impact Factor value: 8.226 | ISO 9001:2008
|