BUTLLETÍ
DE LA SOCIETAT CATALANA DE MATEMÀTIQUES
Institut d’Estudis Catalans
Volum 31 ● Número 2 ● Desembre 2016
©delsautorsdelsarticles
EditatperlaSocietatCatalanadeMatemàtiques filialdel’Institutd’EstudisCatalans CarrerdelCarme,47 08001Barcelona
Textrevisatlingüísticament perlaUnitatdeCorrecciódelServeiEditorialdel’IEC.
ImprèsaLimpergraf,SL
ISSN:0214-316-X DipòsitLegal:B19272-1987
Sónrigorosamentprohibides,sensel’autoritzacióescritadelstitularsdel copyright,lareproducciótotaloparciald’aquestaobraperqualsevolprocedimentisuport,incloent-hilareprografia ieltractamentinformàtic,ladistribuciód’exemplarsmitjançantllogueroprésteccomercial,la inclusiótotaloparcialenbasesdedadesilaconsultaatravésdexarxatelemàticaod’Internet. Lesinfraccionsd’aquestsdretsestansotmesesalessancionsestablertesperleslleis.
ButlletídelaSocietatCatalanadeMatemàtiques Vol.31,núm.2,2016
Índex
NatàliaCastellana Hihaviaunavegadaunpuntfix....................................................99
CarlosD’Andrea Idealsdecorbesmòbilsilasevainteraccióambeldissenyassistit perordinador......................................................................121
JoanGirbau Detecciód’onesgravitatòries......................................................143
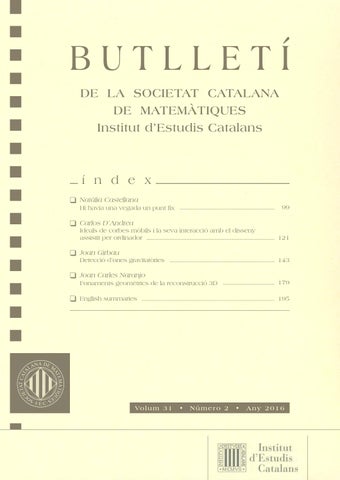
JoanCarlesNaranjo Fonamentsgeomètricsdelareconstrucció3D...................................179
Englishsummaries.....................................................................195
ButlletídelaSocietatCatalanadeMatemàtiques Vol.31,núm.2,2016.Pàg.99–120. DOI:10.2436/20.2002.01.68
Hihaviaunavegadaunpuntfix…
NatàliaCastellana
DedicatalaLaia,quem’ensenyacadadiaa (ad)mirarlescosesambsenzillesa.
Resum: Undelsresultatsclàssicsquetrobemenlamajoriadellibresdetopologia algebraicaéselteoremadelpuntfixdeBrouwer,queutilitzatècniquesd’espaisrecobridors,càlculdegrupfonamentaligrupsd’homologia.Enaquestarticlepresentaremuna demostracióbasadaenunlemadecombinatòriatopològica,ellemadeSperner,quefa accessiblelademostraciósenseelconeixementdelestècniquesabansmencionades.
Paraulesclau: topologiaalgebraica,combinatòria,puntfix.
ClassificacióMSC2010: 55M20,91A06.
1Introducció
Undelsresultatsclàssicsquetrobemenlamajoriadellibresonesfauna introduccióalatopologiaalgebraicaéselteoremadelpuntfixdeBrouwer(1912), queensdiuquetotaaplicaciócontínua f delaboladedimensió n, Bn,ensí mateixatéalmenysunpuntfix(ésadir,existeix x ∈ Bn talque f(x) = x). TeoremadelpuntfixdeBrouwer(1912). Sigui Bn unaboladedimensió n. Totaaplicaciócontínua f : Bn → Bn téalmenysunpunt x ∈ Bn talque f(x) = x.
Brouwer[2]demostraelresultatperaboles n-dimensionalsutilitzantla nociódegraud’unaaplicaciócontínua.Endimensió2,aquestresultatapareix enmoltsllibresdetextcomunaconseqüènciadelcàlculdelgrupfonamental delcercle S 1 idelfetqueaquestgrupnoéstrivial.Endimensionssuperiors s’usenaltreseinesdetopologiaalgebraicacomelsgrupsd’homologiasingular. Aquestresultatésequivalentalfetquelesesferesnosóncontràctils.
Aquestarticleesbasaenlalliçóinauguraldelcursacadèmic2015–2016delsgrausdematemàtiques,físicaimatemàtiques,estadísticaaplicadaiestadísticaaplicadaisociologiadelaUniversitat AutònomadeBarcelona,impartidaperl’autora.
Desd’unpuntdevistamésdistès,aquestésunresultatqueespotexplicar totprenentunatassadecafè.Silataulatéestovalles,penseuquecadapuntde lasuperfíciedelataulas’identificaambunpuntdelesestovallesquetéasobre. Totseguit,agafeulesestovalles,gireu-les,arrugueu-les…,idequalsevolmanera torneu-lesadeixarasobredelataula(sobretotaopartdelasuperfícieque ocupavenabans);aleshoreshihaalmenysunpuntdelesestovallesquetornaa estarenlaverticaldelaposicióqueocupavaabans.Isilataulanotéestovalles? Fixeu-vosenlatassadecafè.Demanerainformal,cadapartículadecafèocupa unaposicióal’interiordelatassa.Totseguitremeneuelcontingutdelamanera quevulgueu(enunsentit,enl’altre,fentvuits…)i,quanelcafètorniaquedar quiet,afirmemquealmenysunapartículaestàocupantlamateixaposicióque ocupavaabansderemenar.
Donantunaulladaalllibre IntroductiontoTopology [7],escritperSolomon Lefschetz,veiemenl’índexqueelteoremadelpuntfixdeBrouwerperalabola dedimensió n apareixdemostratmoltabansdelcapítolenquès’introdueixel grupfonamental.Totjusts’hanintroduïtelscomplexossimplicials.Sianema lapàgina117d’aquestllibre,hitrobemelteorema6.1,queesjustificadela manerasegüent:
(6.1) Theorem Everymappingoftheclosed n-cell(= n-disk)intoitselfhasa fixedpoint(Brouwer).
TheproofmerelyrequirestheSpernerlemmaintheform(5.5)andthe existenceofsubdivisionsofarbritarialysmallmesh.
Atenció,nomésenscalendosingredients:ellemadeSpernerielprocésde subdivisióbaricèntrica.Moltsseguramentjaconeixeuelprocésdesubdivisió baricèntrica;aixídoncs,començaremlanostraaventuraambellemadeSperner. Lesprimeresquatreseccionsestandedicadesaexplicarlademostració d’aquestlemai,també,algunadelesaplicacionsaproblemesderepartiment justdebéns.PeraladarrerasecciótornaremaagafarelllibredeLefschetzper lapàgina134,oncomençalasecciódedicadaaunaltredelsteoremesclàssics entopologiaalgebraica:elteoremadeBorsuk-Ulam.Compodemexplicaraquest resultatprenentelsolalaplatja?Agafemunapilotadeplatjainfladaiaparellem totselsseuspuntsantipodals.Ara,ladesinflemiladeformemdelamaneraque enssembli.Totseguitlaposematerradequalsevolmanera.Aleshoresafirmem quealmenyshihaunaparelladepuntsantipodalsenlamateixavertical.
TeoremadeBorsuk-Ulam. Sigui f : Sn → Rn unaaplicaciócontínua.Aleshoresexisteix x ∈ Sn talque f(x) = f( x)
ElprimerparàgrafdelaseccióIV.7de[7]diu:
Thematerialinthepresentsectionhasbeencommunicatedtotheauthorby A.W.Tucker.AcertainalgebraiclemmaresemblingSperner’slemmaisfirst establishedandvariousknowntheoremsarethendeducedfromthelemma.
Explicarembreumentcomespotescriureunahistòriaparal lelaapartirdel lemadeTuckerambunsactorsdiferents.
2EllemadeSperner
EllemadeSpernerésunlemadecombinatòriatopològicasobresubdivisionsde símplexs.Comencemexplicantquèdiuaquestlemaenelscasosdedimensió1 i2.
Sigui I l’interval [0, 1].Elsubdividimen n subintervalsambelspunts0 = x0 <x1 < ··· <xn < 1 = xn.Araetiquetemelsvèrtexs xi, i = 0,...,n, amb0o1ambl’únicacondicióqueelsextrems, {0, 1}∈ I,tinguinetiquetes diferents.Diremqueunsubintervalésdetipus (a,b) sielsseusextremsestan etiquetatsamb a enunvèrtexi b enl’altre.Aleshoreshihaunnombresenar desubintervalsdetipus (0, 1).Perquè?
1 0 0 1 0 0
Peracadasubintervalcomptemquantszerostéenelsseusextremsi femlasumasobretotselsintervals.Aquestasumatotalésigualalnombre desubintervalsdetipus (0, 1) mésduesvegadeslasumadesubintervalsde tipus (0, 0).Pertant,siprovemqueaquestnombreéssenarjahauremacabat. Arabé,fixeu-vosqueaquestnombreéstambéigualaldobledevèrtexsinteriors ambetiqueta0més1(elquecorresponal’extremambetiqueta0).Pertant, aquestasumaéssenarijahotenim.
Ara,vegemcomespodriageneralitzaraquestasituacióadimensió2.Sigui T untriangleambunasubdivisiódelseuinteriorenregionstambétriangulars (duesregionsteneninterseccióobébuida,obéenunaarestasenceraobéen unvèrtex).
Elsvèrtexsd’aquestasubdivisióestanetiquetatsambelementsdelconjunt {0, 1, 2},peròdemaneraquesesatisfanduescondicions.Laprimeraés queelsvèrtexsprincipalsdeltriangle T tenenetiquetesdiferents,ilasegona ésquel’etiquetacorresponentaunvèrtexsituatenunadelesarestesde T noméspottenirunadelesduesetiquetesqueapareixenenelsvèrtexssituats alavoradel’aresta.
AleshoresellemadeSpernerensdiràquealmenyshihauntriangledelasubdivisióquetéelsvèrtexsetiquetatsusanttotstreselementsdelconjunt {0, 1, 2} i,defet,n’hihaunnombresenar.
Espotprovarfàcilment.Presentaremduesdemostracions:unaenquènomés esmostral’existènciad’aqueststrianglesiunaaltrademésconstructiva.
Laprimerademostracióesbasaenunargumentcombinatoricomenelcas delsegmentquehemvistabans.Diremqueuntriangleésdetipus (a,b,c) si elsseusvèrtexstenenlestresetiquetes {a,b,c}.Consideremaralesquantitats següents:
1. Q éselnombredetrianglesdetipus (0, 0, 1) o (0, 1, 1).
2. R éselnombredetrianglesdetipus (0, 1, 2).
3. X éselnombred’arestesdetipus (0, 1) situadesalavorade T .
4. Y éselnombred’arestesdetipus (0, 1) interiorsa T .
Aleshorespodemcomptarelnombretotald’arestesdetipus (0, 1),uncop desmuntateltriangle,deduesmaneres:atravésdelesarestesoatravésdels triangles.Obtenimlaigualtatsegüent:
2Q + R = 2Y + X.
Noméshihaarestesexteriorstipus (0, 1) enundelscostatsdeltriangle T , aquellcostattalqueelsseusvèrtexstenenetiquetes0i1.Siensfixem,doncs, enaquestaaresta,tenimunsegmentsubdividitietiquetatdemaneraque elsextremstenenvalorsdiferents.Aquestéselcasendimensió1quetot justacabemdedemostrar.Observem,doncs,que X éssenar.Pertant,també 2Q + R ésunnúmerosenari,enparticular, R éssenar.Així,hihaunnombre senardetrianglestipus (0, 1, 2).Enconcret,almenysn’hihaun. Lasegonademostraciós’explicaambunahistòriaitéuncaràcterconstructiu. Imagineuqueeltriangleamblasubdivisióéslaplantad’unlaberintd’habitacionstriangularsdemaneraquenoméshihaportesalesparetstipus (0, 1). Jasabemquenoméshihaportesd’entradaenundelscostatsdeltriangle,ia
mésn’hihaunnombresenar.Dinsdellaberinthihatrestipusd’habitacions: senseportesencapdelessevesparets(mainohipodremaccedir),ambdues portesiambunasolaporta.Leshabitacionsambunasolaportasónelnostre objectiu:lesdeltipus (0, 1, 2).
Quèhemdeferperarribaraunahabitaciódetipus (0, 1, 2)?Entremal laberintperunaportaexterior(n’hihaunnombresenar)iensfiquemenla primerahabitació.Noméstenimduesopcions:jahemtrobatl’habitacióque buscàvemdetipus (0, 1, 2) perquènoméstéunaporta,obétéduesportes. Enelsegoncastravessemlaportaquenohemutilitzatientremenunanova habitació,iaquípodemrepetirl’argumentacióanterior.Comquehihaun nombrefinitd’habitacions,obéacabaremelcamíenunadetipus (0, 1, 2),o béaquestcamíensportaràcapal’exteriorunaltrecop.Sisortimal’exterior, segurquepodemtornaraentrarperunaportaquenohàgimutilitzatabans, jaque,comsabem,n’hihaunnombresenar.Aixíquetardod’horatrobarem unahabitaciódetipus (0, 1, 2).Fixeu-vosquehemdescritunalgorismeper trobaralmenysuntriangletipus (0, 1, 2).Podemafirmarquen’hihaunnombre senar?Delesquesónaccessiblesdesdel’exterior,síquepodemdirquen’hi haunnombresenar.Peròhipothaverhabitacionsdetipus (0, 1, 2) interiors alesqualsnoaccedimambaquestmètode.Bé,peròfixeu-vosquehand’anar aparelladesperquèsicomencéssimelrecorregutenunad’elles,alaforça hauríemd’acabarenunaaltradelmateixtipus.
Noteuqueenlesduesdemostracionshemprovatelsegüent:donatun polígonambunatriangulacióalaquals’hanassignatetiquetes {0, 1, 2} als vèrtexs,elnombredetrianglesdetipus (0, 1, 2) éscongruentambelnombre d’arestesdetipus (0, 1) (ambmultiplicitat)mòdul2.Lacondiciósobreles etiquetesalavoranomésensasseguraqueaquestsnombressónsenars.
Araquejatenimunamicad’intuïciósobreelqueseràellemadeSperner, introduiremelsconceptesnecessarisperenunciar-loengeneral.
Definició1. Donats n + 1puntsindependentsdemaneraafía Rm amb m ≥ n, {p0,...,pn},un n-símplex ∆ ésl’embolcallconvexd’aquestconjuntdepunts. Cadasubconjuntfinitde k + 1elementsde {p0,...,pn} determinaunsubsímplexdedimensió k ques’anomenauna k-carade ∆.
Enparticular,cada x ∈ ∆ espotexpressarcomunacombinaciólineal d’aquestspunts x = αipi,on αi = 1i αi ≥ 0peracada i.Elscoeficients αi sónlescoordenadesbaricèntriquescorresponentsalpunt x ∈ ∆, x = (α1,...,αn).
Unapropietatdelssímplexsquefaremservirmésendavantéselfetque sóntancatsiacotatsdins Rn peraalgun n,ipertantsóncompactes.
Definició2. Una triangulació d’un n-símplex ∆ ésunacol.lecciófinitade n-símplexstalsquelasevaunióés ∆,amblapropietatquesidosd’aquestssímplexs s’intersequen,aleshoreshofanenunacarasenceracomunaatotsdos.
Definimaraenquèconsisteixengeneraletiquetarunatriangulaciód’un símplex.
Definició3. Donatun n-símplex S ambunatriangulació,un etiquetatgede S ambetiquetes {0, 1,...,n} ésunaaplicació L delconjuntdevèrtexsalconjunt {0, 1,...,n}.Diremque L ésun etiquetatgepropi siescompleixenlesdues condicionssegüents:
1. Elsvèrtexs pi = (0,..., 1i+1) ,..., 0),pera i = 0,...,n,tenenetiquetes diferents, L(pi) ≠ L(pj ),peratot i ≠ j ∈{0, 1,...,n}.
2. Lesetiquetesutilitzadesenunacaradedimensió n 1determinada perunsubconjunt {pi1 ,...,pin } devèrtexscorresponenalconjunt {L(pi1 ),...,L(pin )}.
Diremqueun n-subsímplexdelatriangulacióésdistingitquanelsseus n + 1vèrtexsutilitzentoteslesetiquetes,ésadir,ésdetipus (0, 1,...,n)
LemadeSperner(1928)[14]. Donadaunatriangulacióambunetiquetatgepropid’un n-símplex,hihaunnombresenarde n-símplexsdistingitsalatriangulació.
Prova. Jahemdemostratelscasos n = 1i n = 2.Suposem,doncs,queel resultatéscertperasímplexsdedimensionsmenorsque n.Sigui K un n-símplex ambunatriangulacióiunetiquetatgepropi.Consideremlesquantitatssegüents:
1. Q éselnombrede n-símplexsdetipus (0, 1,...,n 1,i),on i = 0, 1,... , n 1.
2. R éselnombrede n-símplexsdetipus (0, 1,...,n),ésadir,distingits.
3. X éselnombrede (n 1)-símplexsdetipus (0, 1,...,n 1) alavora.
4. Y éselnombrede (n 1)-símplexsdetipus (0, 1,...,n 1) interiors.
Sesatisfàlaigualtat2Q + R = X + 2Y .EllemadeSpernerperadimensió n 1ensdiuque X éssenar:noteuqueels (n 1)-símplexsalavorade tipus (0, 1,...,n 1) nomésestrobenenunadelescaresdedimensió n 1, aquelladeterminadaperaquellsvèrtexsprincipals pi ambetiquetaalsubconjunt {0, 1,...,n 1}.Pertant,delaigualtatdeduïmque R hadesertambé senar.
Aixímateix,espotdemostrardemaneraconstructivaimitantl’argument donatperalcas n = 2.Ésadir,siimaginemquenoméspodemtravessarels (n 1)-símplexsdetipus (0, 1,...,n 1).Aleshoresdinslatriangulacióhi haurà n-símplexsambunasolaentrada,quesónelsdistingits;duesentrades,o cap.Elmateixraonamentquehemfetservirperalcasdedimensió2ensporta alamateixaconclusió. ✷
2.1Sabíeuque…
EmanuelSperner(1905–1980)vaserunmatemàticalemany.El1934foucatedràticaKönigsberg(actualKaliningrad),ciutatconegudaentreelsmatemàtics perquèéslaciutatonsesituaelproblemadelspontsquevaresoldreLeonhardEuler.TambévasermembrefundadordelcentrederecercaMathematischesForschungsinstitutOberwolfach(Alemanya).
EllemadeSpernerapareixperprimeravegadaal’article[14]enuncontext diferentdelteoremadelpuntfixdeBrouwer.Posteriormenta[6]esvaveure queellemapermetiadonarunademostraciód’aquestresultat.
3ElteoremadelpuntfixdeBrouwer
EnaquestasecciódemostraremelteoremadelpuntfixdeBrouwerapartirdel lemadeSpernerielprocésdesubdivisióbaricèntrica,talcomestrobaenel llibre[7].
Lapropietatdelpuntfixenunespaitopològicespreservaperhomeomorfismes;ésadir,sitotaaplicaciócontínuad’unespaitopològic X ensimateix téunpuntfixi Y éshomeomorfa X,ésfàcilcomprovarque Y télamateixa propietat.Així,alarestadelasecciódemostraremelteoremadelpuntfixde Brouwerveientqueel n-símplextélapropietatdelpuntfix.Seràsuficient,ja queéshomeomorfalaboladedimensió n
AbansdecomençarlademostraciódelteoremadelpuntfixdeBrouwer, repassemelcas n = 1ques’explicaenl’assignaturadecàlculdeprimer:tota aplicaciócontínua f del’interval I = [0, 1] ensimateixtéunpuntfix. x
Lademostracióesbasaaferparticionsfinesdel’interval0 = x0 <x1 < ··· <xn < 1 = xn.Suposemque f notécappuntfix.Etiquetemcadapunt xi delaparticiósegons f(xi)>xi o f(xi)<xi.Aleshores,elsextremstenen etiquetesdiferentsiellemadeSpernerpera n = 1ensdiuquehihasubinterval ambetiquetesdiferents.Elsextremsd’aquestssubintervalsperaunasuccessió departicionsdel’intervalcadacopmésfinesensdonaransuccessionsde puntsqueconvergeixenaunmateix x∗ ∈ I complintalavegada f(x∗) ≥ x∗ i f(x∗) ≤ x∗.Enaquestademostració,d’entradahihatreselementsclau:les particionsdel’intervalensubintervalsdelongitudtanpetitacomvulguem,el lemadeSpernerendimensió1ielfetque I éscompacte.
Comencemrecordantbreumentelprocésdelasubdivisióbaricèntrica,que seràl’einatècnicaprincipaldelademostració,juntamentambellemade Sperner.
Definició4. Donatun n-símplex S ambvèrtexs {p0,p1,...,pn},elbaricentre b ∈ S éselpuntdecoordenades b = 1 n+1 pi.
Ambelsbaricentresdetotselssubsímplexsde S tenimunprocedimentper aconstruirtriangulacionsd’unamaneraestàndardenunprocésqueespot repetir.Eldescriureminformalment.Comencemambels1-símplexsoarestes. Afegimelbaricentredecadascuniconsideremlesnovesarestesqueapareixen. Aramiremels2-símplexsotriangles,hiafegimelbaricentrecomunnouvèrtex itoteslesarestesquevanalsvèrtexsquejateníem;aixònonoméscreanoves arestessinótambéunatriangulaciódel2-subsímplex.Ianemiterantaquest procés,afegintelbaricentreicreanttotselssubsímplexsnecessarisqueel contenen.Unaimatgevalmésquemilparaules…
Observeuque,enlanovatriangulació,elmàximdelsdiàmetresdetots elssímplexshadisminuïtrespectealatriangulacióanterior.Aquestprocés desubdivisióbaricèntricaespotiterartantesvegadescomsiguinecessari,de maneraqueelsdiàmetresdelssímplexssiguintanpetitscomcalgui:donat > 0, existeix n ≥ 0talqueelmàximdelsdiamètresdelssímplexsdelatriangulació obtingudaiterant n vegades(omés)elprocésdesubdivisióbaricèntricaés menorque .
Jatenimelsingredientsnecessarisperdemostrarelteoremadelpuntfix deBrouwertalcomindicaLefschetzalseullibre[7]:subdivisióbaricèntrica,el lemadeSpernerielfetqueelssímplexssóncompactes.
ProvadelteoremadelpuntfixdeBrouwer. Sigui S un n-símplexambvèrtexs pi = (0,..., 1i+1) ,..., 0), i = 0,...,n encoordenadesbaricèntriques.Suposemque f : S → S ésunaaplicaciócontínuasensepuntsfixos,ésadir, f(x) ≠ x peratot x ∈ S.
Construïmunasuccessió {S1,S2,... }={Si}i∈N detriangulacionsde S,de maneraquecada Sj ésunatriangulaciódel’anterior Sj 1 italqueelmàximdels diàmetresencadascunatendeixazeroquan j esfagran.Aquestasuccessió existeixprenentiteracionsdelasubdivisióbaricèntrica.
Fixemunatriangulació Sj ietiquetemelsseusvèrtexsdelamanerasegüent. Donatunvèrtex x = (x0,...,xn) encoordenadesbaricèntriques,aleshores
L(x) = i si i ésl’índexméspetittalquelacoordenada i-èsimacompleix f(x)i <xi.Comque f(x)i = xi = 1i f(x) = x,aquestetiquetatgeestà bendefinit.Comprovemaraqueéspropi.
Escompleixlaprimeracondició,jaque L(pi) = i.Elspunts x ∈ S que estrobenalacaradedimensió n 1determinadaper {pi1 ,...,pin } tenenla característicaqueunadelescoordenades(ladelvèrtexquenoapareixalallista) sempreészero.Aleshores L(x) mainoprendràelvalorcorresponentenaquesta coordenada,ésadir, L(x) ∈{i1,...,in}.Pertant,ellemadeSpernerensdiu quehihaalmenysun n-símplexdistingita Sj ambvèrtexs {zj,0,...,zj,n},on L(zj,i) = i.
Hemconstruïtunasuccessiódesímplexs.Arafaremservirqueel n-símplex éscompacte:totasuccessiódepuntsa S téunasuccessióparcialconvergent. Prenemlasuccessióformadapelsvèrtexs {zj,0}:sabemquehihaunasuccessióparcialconvergentcapaunpunt z0.Lacontinuïtatde f ensassegura que f(z0)0 ≤ z0 0 .Descartemelstrianglesquenoformenpartd’aquestasuccessióparcialconvergentirepetimelmateixargumentamblasuccessióde vèrtexs {zj,1};iaixíobtenim z1,amb f(z1)1 ≤ z1 1 .Comqueelspuntssón vèrtexsdetrianglesambdiàmetrequetendeixazero,tenimtambéqueels límitscoincideixen, z1 = z0.Repetintaquestprocésfinsa {zj,n},obtenimun punt z∗ quecompleix f(z∗)i ≤ z∗ i peratot i = 0,...,n.Peròaixònomésés possiblesi f(z∗)i = z∗ i peratot i,arribantaixíaunacontradicció. ✷
ElteoremadelpuntfixdeBrouweracostumaapresentar-secomaconseqüènciadelfetquel’esfera Sn 1 noésunretractedelabola Bn.Peròsón enunciatsequivalents;pertant,apartirdellemadeSpernertambédemostrem aquestfet.
Proposició5. Sónequivalents:
1.Totaaplicaciócontínua f : Bn → Bn téunpuntfix.
2. Nohihacapaplicaciócontínua r : Bn → Sn 1 talque r(x) = x si x ∈ Sn 1 .
Prova. Suposemqueexistísunaaplicaciócontínua f : Bn → Bn sensepunts fixos.Aleshoresdefinim r : Bn → Sn 1 delamanerasegüent:donat x ∈ Bn , sigui r(x) ∈ Sn 1 elpuntdetalldelasemirectaqueuneix f(x) amb x.
f(x) x r(x)
Llavors r defineixunaretraccióde Bn en Sn 1:escompleixque r(x) = x si x ∈ Sn 1
Arasuposemqueexistís r : Bn → Sn 1 contínuatalque r(x) = x si x ∈ Sn 1.Aleshoresconsidereml’aplicació f : Bn → Bn definidaper f(x) =−r(x). D’aquestamanerahemconstruïtunaaplicaciócontínua f sensepuntsfixos.✷
Finalment,lasegonacondiciódelaproposició5éstambéequivalentalfet quel’esfera Sn 1 noéscontràctil.Unahomotopiaentrel’aplicacióconstant ilaidentitatdónallocaunaretracció r : Bn → Sn 1,observantque Bn és homeomorfaunconambbase Sn 1.Ialrevés,unaretracció r donarialloca unahomotopiadelaidentitatal’aplicacióconstant.
PersimplicitathemexposatelteoremadelpuntfixdeBrouwerpera n-símplexsoboles,peròésvàlidengeneralperasubespaiscompactesiconvexos K ⊂ Rn.VaserunanyméstarddelapublicaciódellemadeSperner, el1929,queKnaster-Kuratowski-Mazurkiewicz[6]elvanutilitzarperdemostrarunteoremasobrerecobrimentsdesímplexsdelqualesdedueixelteorema delpuntfixdeBrouwer.
Entrelesmoltesgeneralitzacionsd’aquestteorema,caldestacarelteorema deSchauder[12]:sigui K unsubespaicompacteiconvexd’unespaivectorial localmentconvex,aleshorestotaaplicaciócontínuade K ensimateixtéunpunt fix.UnaaltrageneralitzacióéselteoremadeKakutani[5]perafuncionsque prenenvalorsenconjuntsiqueésunapeçaimportantenelconegutteorema deNashsobrel’existènciad’equilibrisdeNashenteoriadejocs[11].Quètéa veureelteoremadelpuntfixdeBrouwerambeljocdel’Hex?Unalecturamolt recomanablesónlesnotes[10].
3.1Sabíeuque…
LuitzenEgbertusJanBrouwer(1881–1966)vaserunmatemàticifilòsofholandès.Apartdelteoremadelpuntfix,vaprovaraltresresultatsmoltimportants enelcampdelatopologiaalgebraica,comelteoremadelabolapeluda(1912). Lasevademostraciódelteoremadelpuntfixusatècniquesdelatopologia algebraicaqueassegurenl’existènciadelpuntfixdemaneranoconstructiva. Curiosament,alcapd’unsanysvafundarelcorrentdel’intuïcionisme,queno acceptavalesdemostracionsnoconstructives.
4Unamicadematemàticaaplicada
Enunprimercontacte,ellemadeSpernersemblaunfetsenzillsobrecerts tipusdegrafsambunetiquetatgeespecialalsvèrtexs,peròaquestasenzillesa contrastaambdiversesdelessevesaplicacionssorprenents.Enaquestasecció nomésendescriuremunparellvinculadesalproblemaconegutcomeldela reparticiójusta.Unareferènciaperaaquestaseccióésl’articledeF.E.Su[15].
Elsproblemesdereparticiójustasónaquellsqueestanrelacionatsambla maneradedividirunobjecteounrecursenpartsdiferentsd’acordambuna certanociódejustíciaiigualtat,ésadir,quetothomestàcontentambla particiófinalinoenvejaelquehanobtingutelsaltresparticipants.Enaquests problemesensinteressasaberprimersiunasolucióexisteixi,enaquestcas,com
trobar-la.Unaversión’éselproblemadelpastísquevaplantejarelmatemàtic polonèsHugoSteinhausel1948.Peròhaestatmésrecentmentqueideesde lacombinatòriatopològicahanproporcionatmètodesnousiconstructiusper obtenirsolucionsaaquesttipusdeproblemes.
4.1Elproblemadelrepartimentdelpastís
Suposemquetenimunpastísrectangularquecaltallarirepartirentreungrup de n convidatsaunafesta.Perrepartir-loenscaldràfer n 1tallsambel ganivetparal.lelsalcostatméspetitdelpastís.Peròcadaconvidatpottenir unaopiniódiferentsobrequindelstallsprefereix,perexemple,enfuncióde laganaquetinguiodelsingredientsoladecoraciódelpastís.Algunconvidat pottenirpocaganaperòpreferireltallquetémésxocolata,obéelquetéla cirereta…L’objectiuéstallarelpastísdemaneraquetotselsconvidatsestiguin contentsambeltallqueelshatocatinoprefereixineldecapaltreconvidat. Formalitzemelproblema.
Suposemqueelpastísespresentajarepartitalsconvidats.Diremqueuna personaprefereixundelstallsfixatssicreuquecapaltretalldelpastísés millorquel’escollit.Aquestaeleccióésindependentdelquepensinelsaltres convidats,isuposemquesempreescullalguntall.Amés,enaquestprocés demanaremquesesatisfacinlesduescondicionssegüents:
1. Elsconvidatstenengana:sempretriaranuntallabansquequedar-se senseres,ésadir,d’algunamaneratotselstallssónacceptablesperals convidatsquetenengana.
2. Siunapersonaprefereixuntallenunasuccessióconvergentdepossibles reparticions,aleshoresprefereixelmateixtallenlareparticiólímit.Diem queelconjuntdepreferèncieséstancat.
Suposaremqueelpastísrectangulartélongitud1.Aleshores,podemrepresentarunareparticiópossiblecomuna n-tupladenúmerosrealspositius (x1,...,xn) ∈ [0, 1]n talsque xi = 1,oncada xi éslalongituddeltallque estrobaala i-èsimaposició.
x1 x2 x3
Pertant,l’espaidetoteslespresentacionspossiblesdelpastístallatforma un (n 1)-símplexa Rn ambvèrtexs pi = (0,..., 1i) ,..., 0) ∈ Rn .
Laideadel’estratègiaquepresentaremésoriginaldeF.W.Simmons(vegeu[15]).Treballaremambdosetiquetatgesdel (n 1)-símplexilesseves subdivisions:unrepresentaràelsconvidats,il’altre,leseleccionsquevanfent.
Sigui Sj latriangulaciódel n-símplexobtingudaiterant j-vegadeslasubdivisióbaricèntrica.Escriuremcoma {C1,...,Cn} lallistadeconvidatsalafesta. Peracada j ≥ 0,assignaremalatriangulaciócorresponentunetiquetatge LC ambvalorsa {C1,...,Cn} demaneraquetotselstrianglessiguindistingits.És possible?Vegemcomaconseguir-ho.Pera j = 0,noméscalassignarconvidats diferentsalsvèrtexs, LC (pi) = i.Enelpassegüentutilitzemelprocedimentque expliquemtotseguit,elquals’aniràiterantsuccessivament.Totselsvèrtexsque provenendelpasanteriors’assignenalmateixconvidat C1,elsvèrtexsquesón baricentresdesubsímplexs1-dimensionalss’assignena C2,elsvèrtexsque sónbaricentresdesubsímplexs2-dimensionalss’assignena C3,iaixísuccessivamentfinsaassignar Cn alsbaricentresdesubsímplexs (n 1)-dimensionalsde latriangulació.Ara,cadacopqueiteremlasubdivisióbaricèntricaperobtenir unatriangulació,recol loquemlesetiquetessegonselprocedimentanterior. Informalmentdiremquesi v ésunvèrtexde Sj , LC (v) éselpropietarid’aquest vèrtex.Observeuqueaquestetiquetatgenoéspropi,peròtotselsseussímplexs sóndistingits.
Donada,doncs,unatriangulació Sj ambetiquetatge LC ,construiremun nouetiquetatge LP delamanerasegüent.Sigui v = (x1,...,xn) unvèrtex de Sj quedescriuunareparticiódelpastísentalls,aleshorespreguntaremal propietari LC (v) delvèrtex v quindelstallsprefereix,iposarem LP (v) = i sihaescolliteltall i-èsim.Esllegeixdientque,amblaconfiguració v,el convidat LC (v) prefereixeltall LP (v). Veuremaraqueaquestetiquetatge LP síqueéspropi.Elsvèrtexsprincipals LP sóndelaforma pi = (0,..., 1i) ,..., 0) i,pertant,comqueelsconvidats tenengana,sempretindrem LP (pi) = i,jaqueescolliranl’únictallnobuit. Arabé,els (n 2)-subsímplexsescaracteritzenperquèhihaunacoordenada fixadaquesemprevalzero(aquellaquecorresponalvèrtexquenoapareixala llistadevèrtexs {pi1 ,...,pi(n 1) } quelageneren).I,pertant,capconvidatno escolliràaquelltall;així,si v ésunvèrtexenaquellsubsímplexescompliràque LP (v) ∈{i1,...,i(n 1)}.
Finalment,ellemadeSpernerafirmaquelatriangulació Sj ambetiquetatge LP téunnombresenarde (n 1)-símplexsdistingits.Quèensdiu?Doncs quehihaun (n 1)-símplexdelatriangulaciódemaneraqueelsseusvèrtexs
determinentallsdepastíspropersamblapropietatqueconvidatsdiferents tenenpreferènciesdiferents.Lacondiciódecontinuïtatensdiuquesiapliquem unprocésdepasallímitcomhemfetenlademostraciódelteoremadelpuntfix deBrouwer,obtindremquelessuccessionsd’aquestsvèrtexstenenunaparcial queconvergeixaunpuntdelsímplexamblapropietatquerepresentauna particiódelpastísenlaqualconvidatsdiferentstenenpreferènciesdiferents. Aixídoncs,hemdemostratelteoremasegüent.
Teorema6. Amblessuposicionsanteriors,existeixunamaneraderepartirel pastísdemaneraquecadapersonaprefereixuntalldiferent.
RecordeuqueellemadeSpernertéunademostracióconstructivaquedescriu unalgorismepertrobarsímplexsdistingits.Alapràctica,comtrobemaquesta reparticiójustadelpastís?Elprimerésacordarunnivelldetolerància > 0 entreelsconvidats,ésadir,quesiunconvidatprefereixuntalldepastís xi en unpuntdelsímplex x = (x1,...,xn),aleshorestambéprefereixeltall i-èsim enpuntsaunadistànciamenorque .Pertant,consideremdirectamentuna triangulació Sj ontotsels (n 1)-símplexstinguinundiàmetremenorque , trobemambunalgorismeun (n 1)-símplexdistingitiprenemelbaricentre d’aquest (n 1)-símplex.
4.2Elproblemadellloguerenunpisd’estudiants
Aquestproblematéelmateixesperitqueelrepartimentdelpastísperòamb matisosdiferents.Ungrupd’estudiantsvolllogarunpispercompartir.Han trobatunpisqueelsagradaatots.D’entradaelllogueresdivideixenparts igualsentreells,peròaracalrepartir-seleshabitacionsinototessóniguals. Unessónmésgrans,unesaltrestenenmésllum,n’hihaquedonenalcarreri sónméssorolloses…Ésjustquetotspaguinelmateixindependentmentde l’habitacióqueelstoqui?Potseralgúestariadisposatapagarmésacondició depoderescollirunacertahabitació,oalrevés,algúprefeririapagarmenysa canvidequedar-sealgunahabitacióqueelsseuscompanysnovolen.Elnostre objectiuaraéstrobarunareparticiójustad’habitacionsilloguerdemaneraque totsellsestiguinsatisfetsambl’habitacióquetenenielpreuqueenpaguen.
Demanerasemblantal’exempleanterior,enaquestprocéssuposaremque escompleixenlestrescondicionssegüents:
1. Enqualsevolreparticiódellloguersegonsleshabitacions,tothomtroba unaopcióacceptable.
2. Enqualsevolreparticiódellloguersegonsleshabitacions,unestudiant semprepreferiràunahabitaciódefrancaunaquenohosigui.
3. Siunestudiantprefereixunahabitació/preuenunasuccessióconvergentdepossiblesreparticions,aleshoresprefereixlamateixaopcióen lareparticiólímit.Diem,comabans,queelconjuntdepreferènciesés tancat.
Teorema7. Enlescondicionsanteriors,existeixunareparticiódelllogueren habitacionsdemaneraqueestudiantsdiferentsprefereixenhabitacionsdiferents.
Vegemcompodemdemostrar-ho.Suposemqueellloguerdelpisval1. Enumeremleshabitacionsd’1a n.Aleshoresunatupla x = (x1,...,xn) ∈ Rn , amb xi = 1,representaunareparticiódellloguerenhabitacionsdemanera que xi éselquecalpagarperobtenirl’habitació i.Així,el (n 1)-símplex estàndardrepresental’espaidetoteslesopcionspossiblesd’assignarpreusa leshabitacions.
L’estratègiasegueixlalíniadel’exempleanterior.Consideremtriangulacions obtingudesamblasubdivisióbaricèntricaambetiquetatge LC demaneraque totselstrianglessóndistingits.Lesetiquetessónelsestudiants: LC (v) = i voldràdirqueenelvèrtex v ésl’estudiant i quitriahabitació,iambaquestaeleccióobtenimunnouetiquetatge LE (v) = j.Esllegeixdientqueenla reparticiódellloguerquedefineix v,l’estudiant LC (v) esculll’habitació LE (v).
Vegemquinescondicionscompleixaquestetiquetatge.Enelsvèrtexsprincipals pi = (0,..., 1i) ,..., 0) hihaunmuntd’habitacionsgratisperescollir;així, noméspodemafirmar LE (pi) ≠ i.Amés,enels (n 2)-subsímplexsquees caracteritzenperquèhihaunacoordenadafixada k quesemprevalzero,les condicionsdel’elecciófanquepotser LE (v) = k.L’etiquetatge LE noéspropi.
Aquestasituaciós’arregladelamanerasegüent.Consideremun (n 1)-símplex T a Rn quecontinguiel (n 1)-símplexestàndardqueestemconsiderant. Elsvèrtexsprincipalsdel (n 1)-símplexestàndardsónbaricentresde T .Aleshores,siconsideremlestriangulacionsanteriors, Sj ,estancontingudesenles triangulacions T j obtingudesiterantelprocésdesubdivisióbaricèntricanomés a S.Esteneml’etiquetatgeposant LE (v) = i silacoordenada i-èsimade v és negativa.Espotinterpretarqueafegimlapossibilitatqueunllogaterrebidiners delsseuscompanysperquedar-sel’habitació i.
Arasíquetenimque LE ésunetiquetatgepropide T j iellemadeSperner ensdiuquehihaun (n 1)-símplexdistingit.Amés,aquests’hadetrobar a Sj perlamaneracomhemestès LE alsvèrtexsquenohipertanyen.Ésa dir,tenimun (n 1)-símplexdemaneraqueenlesopcionsqueofereixenels seusvèrtexs,diferentsestudiantsescullenhabitacionsdiferents.Araacabem l’argumentdelamateixamaneraqueenl’exempleanterior:obéfentunpasal límitobéintroduintelconceptedetolerànciaenl’elecció.
Fixeu-vosque,ambl’estratègiaperconvertir LE enunetiquetatgepropi,en realitathemdemostratunlemadeSpernerdualperaunaltretipusd’etiquetatgesdevèrtexsentriangulacionsd’unsímplex.
5Unahistòriasemblant:ellemadeTuckerielteorema deBorsuk-Ulam
Unaltreresultatclàssicqueapareixenelsllibresd’introduccióalatopologiaalgebraicaéselteoremadeBorsuk-Ulam(1933).Agafemelllibrede Lefschetz[7]queenshafetdescobrirellemadeSpernerimiremquèdiu d’aquestresultat.Anemalapàgina134,oncomençaunasecciótitulada«Some theoremsonthesphere».Idiu:
Thematerialinthepresentsectionhasbeencommunicatedtotheauthorby A.W.Tucker.AcertainalgebraiclemmaresemblingSperner’slemmaisfirst establishedandvariousknowntheoremsarethendeducedfromthelemma.
Und’aqueststeoremesquemencionaeltrobemalapàgina138:
(21.4) Theorem Thereisno(continous)mappingof Sn into Sn 1 whichmaps antipodalpointsof Sn intoantipodalpointsof Sn 1 withoutexception.
5.1EllemadeTucker
EllemadeTuckerésunaaltrageneralitzaciódelquepassaenellema deSpernerperalcas n = 1:sietiquetemelsvèrtexsd’unasubdivisiódel’intervalamb {+1, 1} demaneraqueelsextremstenensignecontrari,aleshoreshi haunnombresenardecanvisdesigne.
1 1 1 1 1 1
Enelcasdedimensió2,podemestendreaquestresultatestudianttriangulacionsdelabola B2 etiquetadesambelementsdelconjunt {+1, 1, +2, 2} italsquesónantipodalsalavora,ésadir,si v ésunvèrtexambetiqueta i, aleshores v tambéésunvèrtexambetiqueta i.D’aquestamanera,ellema deTuckerensdiràquehihaalmenysunaarestatalquelesetiquetesdelsseus extremssumenzero.Perquè?
Suposemquenohihacaparestatalqueelsseusvèrtexssuminzero.Com quealavoralesetiquetessónantipodals,alaforçahihad’haverunaarestade tipus (1, 2).Suposemqueaquestesarestessónparetsambportailesaltres noespodentravessar.Comencemacaminarentrantaldiscperunad’aquestes portesdelavora.Comquenohihaarestesdetipus (1, 1) i (2, 2),aleshores eltercervèrtexdeltriangleserà1o 2;pertant,tenimunaaltraportaper continuarelcamí.Repetintaquestargumentanemconstruintunrecorregut quenoméspotacabarsortintperunaaltraarestadetipus (1, 2) alavora diferent,jaquenoméshihaunnombrefinitdetriangles.Pertant,alavoradel dischihad’haverunnombreparelld’arestesdetipus (1, 2)
Fixemunvèrtexdelavora v ielseuantipodal v.Aquestaelecciódivideix elcercleendossemicercles, P i P .Aleshoreselnombred’arestestipus (1, 2) alavoratambéésigualalnombred’arestes (1, 2) méslesdeltipus ( 1, 2) al semicercle P .Recordeuqueaquestasumaésparell.Peròobserveuquenomés espodenproduircanvisdesigneprecisamentenaquestesarestes,jaquehem suposatquenon’hihadetipus ( 1, 1) o (2, 2).Peròperalcas n = 1,sabem quea P hihaunnombresenardecanvisdesigne!
Tuckervaferunademostracióanàlogaalaqueacabemdeveureperal quadrat.Elcasgeneralvaaparèixerperprimeravegadaenelllibre[7]de Lefschetz.Alareferència[3]s’hipottrobarunaprovaperadimensió3quefa servirargumentscombinatorisiunaindicaciódecoms’estendriaadimensions superiors.Aquestesdemostracionsnosónconstructivessinóquefanservir argumentsdecomptar.Unademostracióconstructivaestrobaa[4].Aquestaés laqueexplicarem.Esrestringeixauntipusespecialdetriangulacionsquesón suficientsperalnostreobjectiu,peròellemadeTuckeréscertsenseaquesta restricció.
Apartird’araconsideraremlabola Bn ={(x1,...,xn) ∈ Rn ||x1|+···+ |xn|≤ 1}.Lestriangulacions T de Bn queconsideraremserantotesunrefinamentdelatriangulacióinduïdapelshiperplansgeneratspelseixosde coordenades.Endirem triangulacionsespecials
Definició8. Unatriangulació T de Bn és antipodalmentsimètrica sipera totsímplex σ ⊂ ∂Bn = Sn 1 tenimque σ ésunsímplexdelatriangulació.
Sigui L : V(T) →{+1, 1,..., +n, n} unetiquetatgedelsvèrtexsde T ,direm que L és antipodalalafrontera siperatotvèrtex v ∈ Sn 1 escompleix L( v) =−L(v).
Donat σ unsímplexdelatriangulació,denotaremper L(σ) elconjunt {L(v) | v ∈ V(σ)} delesetiquetesdelsseusvèrtexs.Diremqueun1-símplex ambvèrtexs {v,w} és complementari si L(v) + L(w) = 0(ésadir, L(σ) = {+i, i} pera i = 1,...,n).
LemadeTucker. Sigui T unatriangulacióantipodalmentsimètricade Bn amb L : V(T) →{+1, 1,..., +n, n} antipodalalafrontera.Aleshoresexisteixuna arestao 1-símplexcomplementari.
Lademostracióesbasaenunaideasemblantaladescritaperallemade Sperner.Faremunrecorregutatravésdelatriangulacióperònoméstrepitjant símplexsespecials,quearadescriurem.
Elfetquenomésconsideremtriangulacionsespecials T dónasentitaconsiderarl’ortantonestrobaelsímplex.Donat σ unsímplexde T ,podemprendre unpuntinterior x ∈ σ iconsiderarelconjunt
Sig(σ) ={+i | xi > 0,i = 1,...,n}∪{−i | xi < 0,i = 1,...,n}.
Definició9. Unsímplex σ ∈ T és especial si Sig(σ) ⊂ L(σ).Diremquedos símplexs σ i τ especialssón adjacents siescompleixunadelesduescondicions:
1. σ ⊂ Sn 1 i σ =−τ
2. σ ⊂ τ iSig(τ) ⊂ L(σ).
Unsímplexésespecialsilesetiquetesdelsseusvèrtexsindiquenl’ortant onestroba.Dossímplexsespecialsnoantipodalssónadjacentssiunestà contingutal’altreilesetiquetesdelpetitcodifiquenl’ortantonestrobael símplexgran.
Passaremd’unsímplexespecialaunaltresisónadjacents.Sidossímplexs especials σ1 i σ2 nosónantipodals,tambépassaremd’unal’altre(endospassos) quanelsdossímplexssiguinadjacentsalasevainterseccióiaquestaintersecció siguiespecial.Totplegatescompleixsiinoméssi Sig(σi) ⊆ L(σ1 ∩ σ2) pera i = 1, 2,ésadir,silaintersecciójacontélesetiquetesnecessàriesperquètant aquestaintersecciócomelsdossímplexs σ1 i σ2 siguinespecialsitambéper seradjacenta σ1 i σ2.
Observeuquel’origendecoordenadeséssempreespecial,jaque Sig(0) =∅ Pertant,si L(0) = i,on i ∈{+1, 1,..., +n, n},un1-símplexquecontingui0 seràespecialiadjacenta0sil’altrevèrtexestrobaenelsemieixdeterminatper i.Iaquestaeleccióseràúnica,jaque T ésunatriangulacióespecialielsemieix escollitdepèndemaneraúnicade L(0).
Si σ ∈ T ésespeciali | Sig(σ)|= k,aleshoreselseuinteriorestàcontinguta l’embolcallconvexgeneratpelssemieixosdecoordenadescorresponentsi,per tant,dedimensiómenoroiguala k.D’altrabanda,comquehadecontenirles etiquetesqueindiquenl’ortantonestroba,hadetenircomamínim k vèrtexs; pertant,sabemqueésdedimensió k o k 1.
ProvadellemadeTucker. Suposemquenotenimarestescomplementàries enlanostratriangulació.Enssituemal’origenidescriuremunrecorreguta travésdesímplexsespecialsadjacents.L’origendelnostrerecorregutésl’origen decoordenades.L’origenésunvèrtexespecialilasevaetiqueta L(0) determina unúnicsemieixquecontéunaarestaespecialadjacentaell.
Suposemqueenstrobemenunsímplexespecial σ ,amb | Sig(σ)|= k i dimensió k 1.Si σ ⊂ Sn 1,aleshores σ éslacarad’exactamentunsímplex dedimensió k especialielseuantipodal σ ∈ T tambéésespecial.Si σ noes trobaalafrontera,dinsdelseuortantéslacaradedos k-símplexsespecials (jaque σ contélesetiquetesnecessàriesperdeterminarelssímplexsd’aquell ortant).
Siladimensióde σ és k,aleshoresté k + 1vèrtexs, k delsqualstenenles etiquetesdeterminadesperl’ortantonestroba σ .Aixòvoldirqueunadeles caresdedimensió k 1ésespecial.Elvèrtexquenopertanyaaquestacara, v ∈ σ ,potprendrealtresvalors.Si L(v) ésrepetit,ésadir, Sig(σ) = L(σ), aleshoresaixòdeterminaunaaltracaradiferentespecial.Icomquetédues etiquetesrepetides,nopotseradjacentaunsímplexespecialdedimensió k + 1. Sinoésrepetida,aleshores, L(σ) = Sig(σ) ∪{i}.Hemsuposatquenohiha arestescomplementàries,pertant, |i| ≠ |j| peratot j ∈ Sig(σ).Aleshores,les etiquetesde σ sónsuficientsperfer σ adjacentaexactamentunsímplexde dimensió k + 1enl’ortantcorresponent.
Enconclusió,sinoméspodemtrepitjarsímplexsespecialsenelnostre recorregutcomençantal’origen,obtenimquel’origenésdegrau1ambuna solaopciódesortidaitotselsaltressímplexsespecialsqueanemtrepitjantsón degrau2ambunasolapossiblesortidadiferentdel’entrada.Comquehiha unnombrefinitdesímplexs,arribemacontradiccióialaforçahand’haver-hi arestescomplementàries. ✷
Sabíeuque… AlbertW.Tucker(1905–1995)vaserunmatemàticcanadenc. ElseudirectordetesivaserLefschetz.Foueldirectordetesidedospremis Nobel:JohnNash(PremiNobeld’Economia1994)iLloydShapley(PremiNobel d’Economia2012).VaguanyarelPremiJohnvonNeumann,juntamentamb DavidGaleiHaroldKuhn,l’any1980.Esdeuaelllaformalitzaciódeldilema delpresoner.
5.2ElteoremadeBorsuk-Ulam
DelteoremadeBorsuk-Ulamilessevesaplicacions,se’npodriaescriureun llibresenceri,defet,algújahohafet.Unareferènciamoltrecomanableés elllibredeJiˇríMatoušek[9],ondescriuaplicacionsd’aquestresultataaltres àreesdelesmatemàtiques.
ElteoremadeBorsuk-Ulamtédiversesformulacionsequivalents.Al’article originaldeK.Borsuk[1]s’hidiuqueelseuobjectiuésdemostrarelstres enunciatssegüents.
Teorema10. Totaaplicaciócontínuaiantipodal f : Sn → Sn (i.e. f( x) = f(x))ésessencial,ésadir,noésnulhomotopa.
Teorema11(teoremadeBorsuk-Ulam). Sigui f : Sn → Rn unaaplicaciócontínua.Aleshoresexisteix x ∈ Sn talque f(x) = f( x).
Aquestaversiórepelnomde teoremadeBorsuk-Ulam,jaqueelmateix Borsukposaunanotaapeudepàginaenquèindicaqueaquestenunciat corresponaunaconjecturaproposadaperUlam.
Teorema12(teoremadeLyusternik-Schnirel’man). Consideremels n + 1 conjuntstancats {U1,...,Un+1} queformenunrecobrimentde Sn,aleshores n’hihaalmenysunquecontéunaparelladepuntsantipodals.
AquestaversióvaserprovadaprimerperLyusternik-Schnirel’man[8] l’any1947enunaversiócombinatòria:l’esfera Sn noespotdescompondreen n + 1subconjunts(tancats)dediàmetremenorque2.
Elsteoremes10,11i12sónenunciatsequivalents.Altresversionstambé equivalentssón:
1. Si f : Sn → Rn ésunaaplicaciócontínuatalque f( x) =−f(x),aleshores existeix x ∈ Sn talque f(x) = 0.
2.Nohihacapaplicaciócontínuaantipodal f : Sn → Sn 1 .
3. Nohicapaplicaciócontínua f : Bn → Sn 1 quesiguiantipodalrestringida a Sn ⊂ Bn . ProvadelteoremadeBorsuk-Ulam. Donada f : Sn → Rn,consideremuna novafunció g : Bn → Rn definidaper g(x) = f(x, 1 − x ) f( x, x − 1) Deladefinicióesveuque g( x) =−g(x) si x ∈ Sn 1 .
Laideaésconstruirunatriangulació T de Bn ambunetiquetatge L que compleixilescondicionsdellemadeTucker.
Sigui T unatriangulacióespecialde Bn.Donatunvèrtex v ∈ T definim L(v) = i (resp. L(v) =−i)si i éselprimeríndextalque |g(v)i|= max{|g(v)j |,j = 1,...,n} i g(v)i > 0(resp. g(v)i < 0).Comque g és antipodalalavora,escompleixenlescondicionsdellemadeTuckerper L : V(T) →{+1, 1,..., +n, n}.Pertant,hihaunaarestacomplementària.
Prenemunasuccessiódetriangulacions {T1,T2,... } de Bn talsqueelmàximdelsdiàmetresdelsseussímplexstendeixazero.Perexemple,iterantel procésdesubdivisióbaricèntrica.Aleshorestenimunasuccessiód’arestescomplementàries.Peraalgun i ∈{1,...,n},obtindremunasuccessiód’arestes complementàries σn detipus L(σ) ={i, i},ambvèrtexs {vn,wn},demanera
queladistànciaentreelsdosvèrtexstendeixazero.Comque Bn éscompacte, sabemquehihasuccessionsparcialsconvergentsde {vn} i {wn} iquetenenel mateixlímit x∗ ∈ Bn.D’unabanda, g(x∗)i ≥ 0i |g(v)i|≥|g(v)j | pera j ≠ i Però,d’altrabanda, g(x∗)i ≤ 0i |g(v)i|≥|g(v)j | pera j ≠ i.Aixídoncs,tenim x∗ ∈ Bn talque g(x∗) = 0.Aleshores, f(x∗ , 1− x∗ ) = f( x∗ , x∗ −1). ✷
Amés,elteoremadeBorsuk-UlamimplicaelteoremadelpuntfixdeBrouwer.
Proposició13. ElteoremadeBorsuk-Ulamimplicaelteoremadelpuntfixde Brouwer.
Prova. Sigui f : Bn → Bn unaaplicaciócontínuasensepuntsfixos,aleshoresla proposició5ensdiuquepodemconstruirunaaplicació r : Bn → Sn 1 talque r(x) = x si x ∈ Sn 1.Laprojeccióenles n primerescoordenades p : Sn → Bn ésunhomeomorfismequanlarestringimacadascundelshemisferis H+ = {(x1,...,xn) ∈ Sn | xn ≥ 0} i H ={(x1,...,xn) ∈ Sn | xn ≤ 0}.Aleshores definim g : Sn → Sn 1 posant g(x) = r(p(x)),si x ∈ H+,i g(x) =−r(p( x)), si x ∈ H .L’aplicació g éscontínua,jaquehoésalstancats H+ i H iles definicionsde g coincideixenalaintersecció Sn 1,d’aquestsdostancats.Per construcció,satisfà g( x) =−g(x). ✷
5.3Unamiquetamésdematemàticaaplicada
JahemvistcomellemadeSpernerencombinatòriatopològicapermetiatrobar solucionsdeproblemesderepartimentsjustos.Aralitocaeltornallemade Tucker.ElteoremadeBorsuk-Ulamjas’associademaneranaturalaproblemes derepartiment:perexemple,elteoremadel’entrepàdepernil.Moltesd’aquestes aplicacionsestrobena[9].Lesquedescriuremarabreumentsónparticionsde consensiespodentrobara[13].
5.3.1Mésproblemesdepastissos Suposemquetenimunpastís X que volemrepartirendos,demaneraqueunequipde n participantsconsiderique laparticióésequitativa.Pensemperexemplequeaquestpastísnoéshomogeni iingredientsdiferentsestrobenenproporcionsdiferentsalllargdelpastís.
Cadaparticipant pi téunafunciódemesura µi contínuasobreelssubconjuntsde X.L’objectiuéstrobarlamaneraderepartir X endosconjuntsdisjunts, X = X+ ∪ X ,demaneraquequalsevolparticipantelsvaloriigual.Ésadir, µi(X+) = µi(X ) peratot i = 1,...,n.
Sigui Sn ⊂ Rn+1 homeomorfaa {(x1,...,xn+1) ∈ Rn+1 ||x1|+···+|xn+1|= 1}.Cada (x1,...,xn+1) ∈ Sn determinaunaparticiódelpastíson |xi| ésla llargadadeltall i-èsim,ielsignedeterminasil’assignema X+ o X .Aleshores X+ (resp. X )éslauniódetoteslespecesambsignepositiu(resp.negatiu).
.38 X+ X X+ X
0.2 0.12 +0.3
Consideremlafunció f : Sn → Rn,amb f(x1,...,xn+1) = (µ1(X+),... , µn(X+)),queassignaacadaparticióelsdiferentsvalorsqueelsparticipants atorguema X+ obtingut.Aquestafuncióéscontínua,jaquehosónlesdiferents mesuresdecadaparticipant.Aleshores,elteorema11ensdiuqueexisteix x = (x1,...,xn+1) ∈ Sn talque f(x) = f( x).Peròobservemquepuntsantipodalscorresponenalamateixareparticióintercanviantelpaperde X+ i X Pertant,enaquestpunttotselsparticipantsvalorenigualelsdosconjunts X+ i X
Aquestargumentésexistencial.EllemadeTuckerensproporcionaun algorismeperaproximarlasolució.Fixemunnivelldetolerància > 0,de maneraquesiladiferènciadevaloracióentre X+ i X ésmenorque ,ja elsconsideraremvaloratsigual.Totseguit,consideremunatriangulació T de l’esfera Sn proufina,demaneraquesidosvèrtexsestanunitsperunaaresta, aleshoreslesvaloracionsde X+ enaquestsvèrtexsdifereixenenmenysde peratotselsparticipants.
Acadavèrtex v ∈ T liassignaremunaetiqueta L(v),queésunelementdel conjunt {+1, 1,..., +n, n}.Elnúmeroindicaquinparticipantcreuquela diferènciaentre X+ i X ésmésgran(i,encasd’haver-n’himésd’un,escolliríem eld’índexmenor),ielsigneindicaquinadelesduesporcionsvaloramés. Encasquelesprefereixidelamateixamanera,establimquetriemlaque començaal’esquerradelpastís.Vegemaraquecompleixlescondicionsdel lemadeTucker.Noteuque v intercanviaelspapersde X+ i X ,pertant, L( v) =−L(v).Aleshores,ellemadeTuckerensdiuquehihaunaaresta ambvèrtexs v1 i v2 talsque L(v1) =−L(v2).Peròtotselsparticipantsestaran d’acordqueaquestaésunaequidistribució,jaqueladiferènciadevaloracions ésmenorque peratotsells.
5.3.2Elproblemadeferequips Deixemelspastissosiexpliquemarael problemadeferdosequips.Suposemquetenim2n exploradorsagrupatsen parellessegons n especialitats:2botànics,2matemàtics…Tenenl’encàrrec d’explorarunterritorii,peraaixò,caldividir-losendosequipsicaldividir elterritoriendueszones,unapercadaequip.L’objectiuésfer-hodemanera quecadaespecialitatestiguirepresentadaacadaequipiquecadaexplorador estiguicontentambelterritoriquelihatocat.
Araelterritoriésl’objecte A quecaldividir.Cadaparellad’especialistes i valoraelterritoriambmesures αi i αi,respectivament,demaneraquela parellafaunavaloraciótotalqueéslasumadetotesdues µi = αi + αi.Araja estemenlescondicionsanteriorsisabemquehihaunareparticiódelterritori en A+ i A talque µi(A+) = µi(A+) peratot i = 1,...,n.Comhofemper assignarcadaespecialistaaunequip?Sitotsdosvalorenigual A+ i A ,femuna assignacióal’atzar.Siund’ellsprefereix A+,aleshoresl’altreprefereix A ,ja que µi(A+) = µi(A+),aixíqueassignemacadaespecialistalaporciódeterritori queprefereix.
Referències
[1] Borsuk,K. «DreiSätzeüberdie n-dimensionaleeuklidischeSphäre». Fund. Math.,20(1933),177–190.
[2] Brouwer,L.E.J. «ÜberAbbildungvonMannigfaltigkeiten». Math.Ann., 71(1912),97–115.
[3] Cohen,D.I.A. «Onthecombinatorialantipodal-pointlemmas». J.Combin. TheorySer.B,27(1)(1979),87–91.
[4] Freund,R.M.;Todd,M.J. «AconstructiveproofofTucker’scombinatorial lemma». J.Combin.TheorySer.A,30(3)(1981),321–325.
[5] Kakutani,S. «AgeneralizationofBrouwer’sfixedpointtheorem». Duke Math.J.,8(1941),457–459.
[6] Knaster,B.;Kuratowski,C.;Mazurkiewicz,S. «EinBeweisdesFixpunktsatzesfür n-dimensionaleSimplexe». Fund.Math,14(1)(1929),132–137.
[7] Lefschetz,S. IntroductiontoTopology.Princeton,NJ:PrincetonUniversity Press,1949.(PrincetonMathematicalSeries;11)
[8] Lyusternik,L.;Šnirel’man,L. «Topologicalmethodsinvariationalproblemsandtheirapplicationtothedifferentialgeometryofsurfaces». Uspehi Matem.Nauk(N.S.),2(1(17))(1947),166–217.[Enrus]
[9] Matoušek,J. UsingtheBorsuk-UlamTheorem.Lecturesontopological methodsincombinatoricsandgeometry.Berlín:Springer-Verlag,2003.(Universitext)[Escritencol laboracióambAndersBjörneriGünterM.Ziegler]
[10] Matoušek,J.;Ziegler,G.M.;Björner,A. «AroundBrouwer’sfixedpoint theorem(LectureNotes)».Preprint(2014).Disponiblea arXiv:1409.7890
[11] Nash,J.F.,Jr. «Equilibriumpointsin n-persongames». Proc.Nat.Acad. Sci.U.S.A.,36(1950),48–49.
[12] Schauder,J. «DerFixpunktsatzinFunktionalräumen». StudiaMath.,2 (1930),171–180.
[13] Simmons,F.W.;Su,F.E. «Consensus-halvingviatheoremsofBorsuk-Ulam andTucker». Math.SocialSci.,45(1)(2003),15–25.
[14] Sperner,E. «NeuerBeweisfürdieInvarianzderDimensionszahlunddes Gebietes». Abh.Math.Sem.Univ.Hamburg,6(1)(1928),265–272.
[15] Su,F.E. «Rentalharmony:Sperner’slemmainfairdivision». Amer.Math. Monthly,106(10)(1999),930–942.
DepartamentdeMatemàtiques
UniversitatAutònomadeBarcelona
Bellaterra08193
natalia@mat.uab.cat
ButlletídelaSocietatCatalanadeMatemàtiques Vol.31,núm.2,2016.Pàg.121–141. DOI:10.2436/20.2002.01.69
Idealsdecorbesmòbilsilasevainteracció ambeldissenyassistitperordinador
CarlosD’Andrea
Resum: Presentemuncasd’interacciófructíferaentrel’àlgebracommutativaiel dissenyassistitperordinador.Elsproblemesenaquestaàreaaplicadaicadavegada mésimportantdelainformàticas’hantraslladatal’estudid’estructuresalgebraiques abstractes,ihanenriquitlamatemàticaambmúltiplesresultatsteòricsiproblemes obertsqueexpliquemenaquesttext.
Paraulesclau: parametritzacionsracionals,corbesplanes,àlgebresdeRees, µ-bases, generadorsminimals.
ClassificacióMSC2010: primària:14H50;secundària:13A30,68W30.
Introducció
Eneldissenygeomètricassistitperordinador,lescorbesilessuperfíciesdelpla idel’espaieuclidiàsónactorsessencials,iésperaixòquelasevarepresentació algebraicaigeomètricaésdemoltaimportància.
Allectorlideuenserfamiliarslesrepresentacions«paramètriques»i«implícites»d’unacorbaosuperfíciequevaaprendrealscursosdecàlculi/o geometriaelemental.Lesprimeressónd’interèsperproduirpuntsenuna determinadafigura,mentrequelesformesimplícitessónútilsperdecidiramb facilitatsiunpuntdeterminatpertanyalconjuntono.Perexemple,ésunfet clàssicjaconegutpelsanticsgrecsquelacircumferènciaambcentreal’origen de R2 iradiunitari(figura1)potparametritzar-seaixí:
(1) (enrealitat,laimatged’aquestaaplicaciócobreixtotalacircumferènciaexcepteelpunt ( 1, 0)),mentrequelasevarepresentacióimplícitaalplade coordenades (x,y) ésl’equacióconeguda x2 + y 2 1 = 0. (2)
CarlosD’Andrea
: Lacircumferènciaunitària.
Ambduesrepresentacionssónimportants,jaque—perexemple—percalcular interseccionsentrecorbesésconvenienttenir-neunaenformaparamètricai l’altrademaneraimplícita.
Almóncomputacional,lescorbess’handedefinirdemanera«finita»iprecisa, laqualcosaensportadirectamentalcordel’àlgebra,jaqueprecisamentels polinomisielsseusquocients(lesfuncionsracionals)sónexpressablesamb pocainformació(perexemple,elscoeficientsdelspolinomisimplicats)iprecisió suficient.Enrealitat,degutalacapacitatdeprecisióvisuald’ordinadorsd’avui endia,n’hihaprouambtreballarambfuncionspolinòmiques(oquocients d’aquestes)«atrossos»,degraumoltbaix(sovintlineals).Enaquestescritens limitarematreballarambfuncionsracionals,aixòés,queespuguinrepresentar comapolinomisoquocientsdepolinomisentotelpla.
Al’avantatgede«quedar-nos»almónpolinòmic,quefaqueambpocainformacióalgebraicapuguemcodificarelsnostresobjectesdemaneraprecisa,seli contraposaelfetquenototacorbaalgebraica(elconjuntdezerosd’unpolinomi enduesvariables)sigui«parametritzable».Perexemple,lacúbicadeFermat (vegeulafigura2),d’equaciótansimplecom x3+y 3 = 1,noadmetunaparametritzaciódeltipus (x(t),y(t)),amb x(t) i y(t) funcionsracionalsde t,coma (1).
Aquestasituacióéspròpiadelageometriaalgebraica,encontrastambel quepassaenlesgeometrieslineal,diferencialoanalítica,enlesqualsgairebé totobjectepotdefinir-sedemaneraparamètricaiimplícita,almenyslocalment.
Figura2: GràficdelacorbadeFermat x3 + y 3 = 1.
Figura1
Comquealmóndeldissenyassistitperordinadorlaquantitatdecorbesque esnecessitenpertenirunaprecisióraonableésmoltpoca(acostad’utilitzar altresmecanismesd’ajustquenodiscutiremaquí),diguemqueenslimitarem aconsiderarsolamentaquellescorbesquesón«parametritzables»,ésadir, aquellesquetenenunarepresentaciódelaforma (x(t),y(t)) amb x(t),y(t) ∈ K(t),elcosdefuncionsracionalsambcoeficientsen K iindeterminada t.Aquí, denotaremper K elcosbasequegeneralmentseràeldelsnúmerosreals(el cosperexcel lènciadeldissenyvisual),peròtambédesignaràdevegadesels númerosracionals Q,elsnúmeroscomplexos C,ofinsitotalguncosfinit.
Tenirfórmulesexplícitesisenzillesperpassard’unarepresentació(paramètricaoimplícita)al’altraésdemoltautilitatenaquestcamp,ilacercaiel dissenyd’aquestesformulacionsconstitueixenunaàreaactualderecerca.
Passarderepresentacióimplícitaaparamètricaésunproblemaforçadifícil, jaques’hadecomençarperdetectarsilacorbaenqüestióés«parametritzable» ono,idesprésaconseguirunaformaparamètricaquelarepresenti.Resultats efectiussobrecomesresolelproblemadelaparametritzaciópodentrobarsea[41, 42, 46],peròelsmètodesqueesproposenenaqueststreballssón moltcomplicatsiutilitzentècniquesdegeometriaalgebraicanoelementals,la complexitatdelesqualsencaranoestàbenentesa.
Encontrast,passardelaformaparamètricaaunaimplícitaésrelativament senzill,tantdesd’unpuntdevistateòriccomcomputacional.Enaquestcas, l’anomenat teoremad’eliminació [24, 23]ensdiuqueespodenmanipular algebraicamentlesequacionscomhemaprèsafer-hoencursoselementals d’àlgebra,eliminarlavariable t iquedar-nosambunaexpressióenlesvariables x i y queensdonaràl’equacióquebusquem.
Vegemcomfuncionaaquestteoremaambl’exempledelaparametrització donadaa(1).Delesidentitats
arribemalsistemapolinòmic (1 + t2)x (1 t
(3) id’aquestesduesequacionshemd’«eliminar»lavariable t perquedar-nosamb unaexpressióen x i y.
Sialgunadelesduesexpressionsqueapareixa (3) foslinealen t,espodria resoldreelsistemaexpressant t enfunciódel’altravariable(apartirdel’equació linealen t),ireemplaçantaquestaexpressiódesprésenl’altraequacióperarribar aunaexpressióquedepenguisolamentde x ide y.Peròl’exponentqueapareix encadapolinomide (3) ésquadràtic,laqualcosafaquehàgimd’utilitzar altresmètodesd’eliminació,iaquíésonapareixenescenala«resultantde
CarlosD’Andrea
Sylvester»quevaserintroduïdaperSylvesterel1853a[45],iqueensdiuque eldeterminantd’aquestamatriu
ésunaexpressióequivalentalaqueresultad’havereliminatlavariable t en (3). Ellectorpotcomprovarquecalculantexplícitamentaquestdeterminants’obté 4( 1 + x2 + y 2), unmúltipledelpolinomiquedefineixlacircumferènciaunitària(2).
Engeneral,donatsdospolinomis f(t) = a0 + a1t +···+ amtm i g(t) = b0 + b1t +···+ bntn degraus m i n,respectivament,laresultantdeSylvester d’aquestspolinomiséseldeterminantdelamatriuquadradade n + m filesi columnessegüent:
onlesprimeres n filescontenenelscoeficientsde f disposatsenlaformaque s’indicamésamunt,lesúltimes m filescontenenelscoeficientsde g,ienla restadelamatriuhihazeros.Ésmoltsenzilldeverificarqueenelcasde (3), amb
f(t) = ( 1 + x) + 0 t + (1 + x)t2 , g(t) = y 2t + yt2 , lamatriudeSylvesteresconverteixen(4).
LaresultantdeSylvesteréselqueesdenomina polinomid’eliminació enel sentitqueeldeterminantdelamatriu (5) pertanyal’idealgeneratper f iper g (ésadir,s’escriucom Af +Bg,amb A i B tambépolinomis),peròjanoinvolucra lavariable t.D’algunamanera,hemaconseguit«canviar»lesequacions f = 0i g = 0perunaaltraequacióquejanodepènde t,hemeliminatlavariable t. Aquesta«resolució»viaresultantsdelproblemadelaimplicitaciópotaplicarsedemanerageneral:donadaunaparametritzaciódelaforma K K2 t → xN (t) xD(t) , yN (t) yD(t) , (6)
on xN (t), xD(t), yN (t), yD(t) sónpolinomisenlavariable t nototsellsconstants,talsquemcd(xN (t),xD(t)) = mcd(yN (t),yD(t)) = 1,ielsímbol« » significaquelafuncióestàdefinidaa K llevatd’unconjuntfinitdepunts(els zerosdelsdenominadors),espotutilitzarlaresultantdeSylvesterpereliminar t enlesexpressions
f(t) = x xD(t) xN (t)
g(t) = y yD(t) yN (t), (7) iobtenir(unapotènciade)l’equacióimplícitadelacorbaques’obtécom l’adherènciadelaimatgedel’aplicació (6).Lademostraciód’aquestresultatpot trobar-seenelcapítold’eliminacióiextensióde[24].
Sielspolinomisquecodifiquenlaparametrització (6) tenengraumenoro iguala n,lamatriudeSylvesterquecalculalaresultanttindrà2n filesicolumnes. Sesapqueelpolinomien (x,y) queresultadecalculareldeterminanttambé téelseugraufitatper n,igenèricamentésunpolinomiirreductibledegrau n. Encaramés,silaparametritzacióés«genèricamentinjectiva»(ésadir,lafunció ésinjectivaa K llevatd’unnombrefinitdepunts),itégrauigualque n (el «graudelaparametrització»éselmàximdelsgrausdels4polinomisquela codifiquen),llavorsl’expressióresultantseràunpolinomiirreductibledegrau n Altrament,elpolinomiqueresultad’eliminar t usantlaresultantdeSylvester seràunapotènciad’unpolinomiirreductible.Aquestpolinomiirreductibleés elquedefineixlacorba.Ditenfórmules
Rest x · xD(t) xN (t),y · yD(t) yN (t) = E(x,y)d , (8)
on Rest (· , ·) designalaresultantdeSylvesterque«elimina»lavariable t, E(x,y) éselpolinomiirreductiblequedefineixlacorba,i d ≥ 1.Defet,l’exponent d ésl’anomenat índexdetraçat,queéslaquantitatdevegadesquela parametritzaciórecorrelacorba(enelcasd’aplicacionsgenèricamentinjectives esté d = 1).
Enconclusió,donadaunaparametritzaciódegrau n,hihaunamatriu quadradadedimensió2n talqueelseudeterminantensprodueixlaseva equacióimplícita.Podremtrobarmatriusméspetitesqueprodueixinelmateix efecte?Certament,hihamatriusméspetitespercalcularresultants,perexemple, les«matriusdeBézout»(cf.[1])queredueixenlesdimensionsalameitat,però lapreguntaéssiespodriencanviarelspolinomisqueapareixena (7) peruns demenorgrautalsquelasevaresultanttambéprodueixil’equacióimplícitade lacorba.
Aquesttemavaserelquevaatreurediversosinvestigadorsdeldisseny geomètricassistitperordinadoraprincipisdelsanysnoranta,iquevadonar origenaunainteracciómoltfructíferaentrel’àlgebracommutativa,lageometria algebraicaielmodelatgegeomètricquecontinuafinsavuidia.Vegemcomva començarlahistòria.
CarlosD’Andrea
1Rectesmòbilsi µ-bases
Les«rectesmòbils»vanserintroduïdesperThomasSederbergielsseuscollaboradorsalasèried’articles[40, 38, 39, 25].Elconceptede rectamòbil es basaenl’observaciósegüent:cadafiladelamatriudeSylvesterqueapareixa (4) codifical’equaciód’unarectaenelpla (x,y) ambvalors«mòbils»determinats pelparàmetre t.Perexemple,laprimerafilade(4)corresponalarectamòbil
(1 + t2) · x (1 t2) = 0, (9)
mentrequel’últimafilad’aquestamatriucodificalarecta
(t + t3) y 2t2 = 0 (10)
Peracadavalordelparàmetre t,s’obtél’equaciód’unarectaenelpla (x,y) quetallaràlacircumferènciaprecisamentenelpuntdelacorbacorresponent alvalorde t enlaparametrització (1).Aixòenspermetpensaraquestesrectes comafamíliesderectesque«segueixen»laparametritzaciójuntamentambel valordelparàmetre(vegeulafigura3).
Definició1. Una rectamòbil degrau δ quesegueixlaparametrització (6) és unpolinomi Lδ(t,x,y) = u(t)x + v(t)y + w(t) ∈ K[t,x,y],amb max{deg(u), deg(v), deg(w)}= δ, talque
Lδ t, xN (t) xD(t) , yN (t) yD(t) = 0. (11)
Noteuquetrivialmentelspolinomisqueapareixena (7) sónrectesmòbilsque segueixenlaparametrització.Amésamés,simultipliquemqualsevolrectamòbild’aquestesperunpolinomi z(t) qualsevol,elresultatseràunaaltrarecta mòbil(degraumajor)amblamateixapropietatdeseguirlaparametrització.
Elconjuntderectesmòbilsquesegueixenunaparametritzaciótéunaestructurade mòdul sobrel’anelldepolinomis K[t].Defet,éselmòduldesizígies (syzygies)orelacionsdelaterna xN (t) · yD(t),yN (t) · xD(t),xD(t) · yD(t) , (12) quesónlescoordenadeshomogèniesdelaparametrització(6).
Nodiremgaireresmésenaquestsentit,atèsqueladefinicióderectesmòbils norequereixcomprendreconceptescomsizígieso mòduls.Defet,calcular rectesmòbilsquesegueixenunaparametritzaciódonadaésmoltsenzilljaque, fixat δ,elscoeficientsdelspolinomis u(t), v(t) i w(t) sónlessolucionsdel sistemad’equacionslinealsdeterminatsperlaidentitat(11).
Ambaquestadefiniciógeomètricamentmoltelemental,elmètoded’«implicitacióviarectesmòbils»,talcomvaserformulata[40]diuessencialment: busqueuunconjuntderectesmòbilsdegraumenoroigualque δ,amb δ tan
petitcomsiguipossible,talqueaquestesrectessiguin«independents»enel sentitquelamatriudelsseuscoeficients(comapolinomien t)tinguirang màxim.Ambunamicadesort,trobareu δ + 1formes,amblaqualcosapodreu construirunamatriuquadradaquecontinguitotselscoeficients(comapolinomien t)d’aquestesrectes.Calculeueldeterminantdelamatriu,iobtindreu unmúltiplenotrivialdel’equacióimplícita.Siheu«triatbé»lesrectesmòbils independents,eldeterminantseràiguala E(x,y)d .
Aixòéselquepassaalamatriu (4):alessevesfileshihacodificades4rectes mòbilsdegrau3linealmentindependents,ieldeterminantd’aquestamatriu ensdónal’equacióimplícitadelacircumferènciaunitària.Espodràconstruir unamatriuderectesmòbilsdegraumenor?Larespostaésquesí,iunexercici moltsenzillperallectorésresoldrelesequacionsqueapareixena (11) ambla parametrització (1) i δ = 1,itrobarduesrectesmòbilslinealmentindependents comlessegüents:
L1(t,x,y) = y (x + 1)t, L∗ 1 (t,x,y) = ( 1 + x) + ty.
Ambelscoeficientsd’aquestesrectesconstruïmunamatriude2 × 2: y 1 x 1 + xy , (13) eldeterminantdelaqualés x2 + y 2 1,quedónallocal’equacióimplícitaque estàvembuscant.Noteuqueaquestamatriutélameitatdefilesque (4),amb laqualcosahemaconseguitd’algunamanera«simplificar»elproblemadela implicitació.
Figura3: Rectesmòbils L1 (al’esquerra)i L∗ 1 (aladreta).
Espotferaixòdemanerasistemàticaambunaparametritzaciógenèrica coma (6)?Quinéselvalorde δ méspetitpossible?Aquestapreguntavaser respostaperHilbertfamésdecentanys,iredescobertaperlacomunitatde modelatgegeomètrica[25].
CarlosD’Andrea
Teorema2. Donadaunaparametritzaciócoma (6) degrau n,existeixenun únic µ ∈ N, 1 ≤ µ ≤ n 2 ,iduesrectesmòbils Pµ (t,x,y), Qn µ (t,x,y) que segueixenlaparametrització,talquequalsevolaltrarectamòbilquesegueix (6) ésunacombinaciópolinòmicad’aquestesdues,ésadir,quetota Lδ(t,x,y) com enladefinició1espotexpressarenlaforma
Lδ(t,x,y) = p(t)Pµ (t,x,y) + q(t)Qn µ (t,x,y),
amb p(t),q(t) ∈ K[t] degrausfitatsper δ µ i δ n + µ,respectivament.
Elspolinomis Pµ (t,x,y) i Qn µ (t,x,y) podencalcular-seexplícitament sensenecessitatdeconèixer δ apriori,utilizantuna«resoluciólliure»del’ideal generatpels3polinomisqueapareixena (12),ihihaalgorismeseficientsper feraquestscàlculs;vegeu,perexemple,[9].
Noteuqueencaraqueelsalgorismesgeneralspercalcularresolucionslliures estanbasatsencàlculsamb«basesdeGröbner»queengeneraltenenuna complexitatdecàlculmoltalta,l’avantatgeenaquestasituacióésquel’idealque estemconsiderantésdeltipus«Hilbert-Burch».Aixòvoldirqueelscoeficients delspolinomis Pµ (t,x,y) i Qn µ (t,x,y) apareixenenlescolumnesdela matriude2 × 3delesprimeressizígiesdelaresolució.Amésamés,els menorsmaximals(ambsigne)d’aquestamatriuensdonenles«coordenades» delaparametrització.Enl’exempledelaparametrització (1),lamatriude Hilbert-Burchés
t 1 t 1 t 1 , icalculantelsmenorsmaximalsambsigned’aquestamatriu,obtenim (1 t2 , 2t, 1 + t2), unmúltiplenotrivialdelvector (12) quecodificalaparametrització (1).Adrecem ellectora[25]peramésdetallssobrelademostraciódelteorema2.
Definició3. Unparellderectesmòbils {Pµ (t,x,y), Qn µ (t,x,y)} comenel teorema2s’anomenenuna µ-base delaparametrització(6).
Noteuqueòbviamentdelteorema2nomésesdesprènlaunicitatdelvalor de µ inodela µ-base.Defet,si µ = n µ (laqualcosapassagenèricamentsi n és parell),llavorsqualsevolcombinació K-linealgenèricad’elementsd’una µ-base ésunaaltra µ-base.Si µ<n µ,llavorselparell {Pµ (t,x,y), Qn µ (t,x,y)} potreemplaçar-seper {Pµ (t,x,y), Qn µ (t,x,y) + r(t)Pµ (t,x,y)} amb r(t) degraufitatper n 2µ,iproduirunanova µ-base.
Laraóperlaqualésimportantcalcular µ-basesnoéssolamentperquèamb ellespodemgenerartoteslesrectesmòbilsquesegueixenunaparametrització (i,enparticular,trobar-ne δ + 1linealmentindependentsperomplirunamatriu derectesmòbilstalqueelseudeterminantensdónal’equacióimplícita),sinó queamésaméshihaunaconnexiómoltdirectaentre µ-bases,resultantsi l’equacióimplícitad’unaparametrització.Aquestresultatvaserdemostrat a[25,teorema1].
Teorema4. Amblanotacióanterioresté:
Rest Pµ (t,x,y), Qn µ (t,x,y) = E(x,y)d . (14)
Aquestteoremaensdónaunmètodepercalcularmatriusderectesmòbils. Enefecte,lamajoriadelesmatriusquecalculenresultantsdeSylvester(per exemple,lesqueesdescriuena[1])tenenenlasevacodificacióelscoeficients delesrectesmòbilsquesónpotènciesde t multiplicadespelselementsd’una µ-base.
Tambéensdiuqueladimensiódelamatriuderectesmòbilsseràde n × n, jaquecadacoeficientd’aquestamatriuéslinealrespectede (x,y),ielgrau de E(x,y) ésgenèricament n.Llavors,elvalorde δ esperatés δ = n 1,i precisamentlamatriudeSylvesterdelparell Pµ (t,x,y), Qn µ (t,x,y) ésuna d’aquestesmatrius.
Espotcalcularlaresultantentredospolinomis f(t) i g(t) ambmatrius méspetitesquelapresentadaa (5).Defet,espotreduirladimensiód’aquesta matriufinsagairebélameitatutilitzantunenginyósmètodedonatperBézout iqueconsisteixenelsegüent:donats f(t) i g(t) totsdosdegraufitatper n, fem
f(x)g(y) f(y)g(x) x y = n 1 i=0 n 1 j=0 aij xiy j .
Resultaquelaresultantentre f i g tambééseldeterminantdelamatriu (aij )0≤i,j≤n 1.Aquestamatriuesconeixcoma matriudeBézout. Hihaconnexionsinteressantsentretotesaquestesformulacions.Defet,si denotemper Sylvt (resp. Bezt )lamatriudeSylvester(resp.Bézout)percalcular laresultantdedospolinomisenlavariable t,a[7,proposició6.1]vamdemostrar ambLaurentBuséelsegüent:
Teorema5. Existeixunamatriuinvertible M ∈ Kn×n talque
Sylvt Pµ (t,x,y), Qn µ (t,x,y) = M · Bezt x·xD(t) xN (t),y ·yD(t) yN (t)
Aquestresultatmostraqueessencialmentles µ-basescontenenlamateixa informacióquelaparametrització (6),iquelasevautilitzaciópotsimplificar formulacionsjaconegudesperalesaltres.Tambéles µ-basescodifiquenbastant bépropietatsgeomètriquesdelaparametrització(vegeuperexemple[22, 10]).
2Còniquesmòbils,cúbiquesmòbils...
Qualsevoldelesmatriusqueapareixenal’enunciatdelteorema5tédimensió n, laqualcosaensdónaunacotainferiorperalmètoded’implicitacióperrectes mòbils.Espodràaconseguircalcularl’equacióimplícitaambmatriusmés petites?
CarlosD’Andrea
Unarespostaaaquestapreguntas’obtéambformulacionsméscompactes percalcularlaresultantcomeldeterminantd’unamatriuméspetita.Per exemple,podríemutilitzarlamatriudeBézoutdelteorema5
Bezt Pµ (t,x,y), Qn µ (t,x,y) , quetéunamidaméspetita(n µ filesicolumnes)quelamatriudeSylvester delspolinomis Pµ i Qn µ .Notemqueelscoeficientsd’aquestamatriumés compactajanocodificaranrectesmòbilscomenelcasdelamatriudeSylvester, jaqueseranquadràticsen x, y.
Detotamanera,acausadel’estructuraespecialdelamatriudeBézout(vegeu perexemple[39]),espodenllegirenlesfilesd’aquestamatriuelscoeficients d’unpolinomiquetambés’anul laquans’especialitzenlesvariables x, y enla parametrització φ.Aixòmotivaladefiniciósegüent.Homogeneïtzaremtotes lesvariablesperpodercontrolarmillorelsgrausielsinvariantsgeomètricsdel problema.Aixídoncs,lanostraparametrització φ és
φ : P1 → P2
(t0 : t1) → u0(t0,t1) : u1(t0,t1) : u2(t0,t1) , (15)
on P1 i P2 designenlarectaielplaprojectiusobre K,respectivament,i ui(t0,t1), 0 ≤ i ≤ 2sónpolinomishomogenisdelmateixgrausensefactorscomuns en K[t0,t1].
Definició6. Una corbamòbil debigrau (δ,ν) quesegueixlaparametrització φ donadaa (15) ésunpolinomihomogenien X0, X1, X2 degrau ν,itambé homogenien t0, t1 degrau δ,talque
L t0,t1,u0(t0,t1),u1(t0,t1),u2(t0,t1) = 0.
Sifem ν = 1,recuperaremladefinicióderectesmòbilsquevamdonar a (1).Si ν = 2,elpolinomiesdiuuna cònicamòbil quesegueix φ [49].Dela mateixamanera,denominarem cúbiquesmòbils lescorbesamb ν = 3,iaixí successivament.
UnasèriedeformulacionsrealitzadesenelsanysnorantaperSederbergi elsseuscol.laboradorsvanposarenevidènciaunfetinteressant:espotcalcular l’equacióimplícitadelacorbaimatgede φ definidaa (15),queanomenarem C, comeldeterminantd’unamatriudecoeficientsdecorbesmòbilsquesegueixen laparametrització.Aquestfetésfàcildecomprovar,elsorprenentésqueles singularitatsdelacorbaaparentmentajudenadeterminarquinaclassede corbesmòbilscaltriari,comméssingularsiguilacorba(ésadir,commés «complicades»siguinlessingularitats),méssimpleseràladescripciód’aquestes corbesmòbils.Perexemple,elresultatsegüentapareixa[38]:
Teorema7. L’equacióimplícitad’unacorbaracionaldegrau 4 parametritzada perpolinomis«sensepuntsdebase»( i.e. sensefactorsencomú)espotexpressar comeldeterminantd’unamatriude 2 × 2.Silacorbanotéunpunttriple,llavors cadaelementdeldeterminantésunacònicamòbil.Altrament,unafilaéslineali l’altraéscúbica.
Peril lustraraquestresultat,consideremelsexemplessegüents.
Exemple. Siguin
Aquestspolinomisdefineixenunaparametrització φ coma (15).Estudiantles singularitatsdelacorbadefinidapelspolinomisanteriorsesveufàcilmentque (1:0:0) ∈ P2 ésunpuntdemultiplicitat3(vegeulafigura4).Enaquestcas, tenim—enelllenguatgedeles µ-basesintroduïtabans—que µ = 1,iespot verificartambéfàcilmentque
1,1(t0,t1,X
ésunarectamòbilquesegueix φ.Ellectortambépotverificarfàcilmentquela cúbicamòbilsegüentdebigrau (1, 3) segueixlaparametrització:
L1,3(t0,t1,X0,X1,X2) = t0(X3 1 +
) + t1 X3 2 , ilamatriu2 × 2delteorema7espotconstruirambelscoeficientsdelesformes L1,1(t0,t1,X0,X1,X2) i L1,3(t0,t1,X0,X1,X2),expressadescomapolinomis en t0, t1: X2 X1
Eldeterminantd’aquestamatriuensdónal’equacióimplícita:
= 0.
Figura4: Gràficadelacorbaparametritzadaper(16).
Exemple. Reproduïmaquíl’exemple2.7queapareixa[18].Considerem
CarlosD’Andrea
Aquestaparametritzaciódónaunacorbadegrau4amb3nodes(vegeula figura5).Espotverificarfàcilmentquelesduescòniquesmòbilssegüentsde grau1segueixenlaparametrització:
Comenl’exempleanterior,lamatriu2 × 2delscoeficientsd’aquestescòniques mòbilsésunadelesmatriusdelteorema7i,calculantexplícitamentelseu determinant,obteniml’equacióimplícita:
Figura5: Gràficadelacorbaparametritzadaper(16).
3L’idealdecorbesmòbilsde φ
Araésunbonmomentperintroduiralguneseinesdel’àlgebraqueensajudaran acomprendrelesconstruccionsgeomètriquesquehempresentatabans.Per exemple,elconjuntdetoteslescorbesmòbilsquesegueixenunaparametritzaciódonadageneraunidealbihomogenia K[t0,t1,X0,X1,X2] queanomenarem idealdelescorbesmòbils d’aquestaparametrització.
Talcomhohemexplicatanteriorment,elmètodedecorbesmòbilsper calcularl’equacióimplícitad’unacorbadonadaperunaparametritzacióracional,coma (15),buscaproveir«receptes»dedeterminantsdematriusles entradesdelesqualssónelscoeficientsdecorbesmòbilsquesegueixenla parametritzacióiquetenengraubaixen t0, t1.Perferaixò,ésd’utilitattenir unadescripciócomenelteorema2d’unconjuntdecorbesmòbilsminimals, apartirdelesqualsespuguinexpressartotselsaltreselementsdel’idealde corbesmòbils.
Afortunadament,l’àlgebracommutativaproveeixdelllenguatgeileseines adequadesperresoldreaquestproblema.A[18],DavidCoxvademostrarque buscarunconjuntminimaldecorbesmòbilséselmateixquecalcularunconjunt minimaldegeneradorsdelnucli K delmorfismed’anellssegüent:
K[t0,t1,X0,X1,X2] → K[t0,t1,z] ti → ti i = 0, 1, Xj → uj (t0,t1)zj = 0, 1, 2 (18)
Enaquestadefinició, z ésunanovavariable.Elresultatsegüentapareixa[18, NiceFact2.4](vegeutambé[8]peralcasenelqual φ noés«genèricament» injectiva):
Teorema8. K ésl’idealdecorbesmòbilsde φ.
Analitzemunamicamésdepropl’aplicació (18).Designemamb I ⊂ K[t0,t1] l’idealgeneratper u0(t0,t1), u1(t0,t1), u2(t0,t1).Laimatgede (18) ésdefet isomorfaal’objectequeenàlgebracommutativas’anomena àlgebradeRees de I
Persermésprecisos,donatunanellcommutatiu R qualsevoliunideal I ⊂ R, l’àlgebradeReesde I esdefineixcoma
Rees(I) =⊕∞ n=0In · zn ⊂ R[z], amb z unanovavariable.Tornantalanostrasituacióconcretademés amunt,utilitzantelsteoremesd’isomorfiaestàndarddel’àlgebra,tenimque K[t0,t1,X0,X1,X2]/K ésisomorfal’àlgebradeReesdel’ideal I
Desd’unpuntdevistageomètric,l’àlgebradeReesd’unidealestàassociada, segonseldiccionari ideals ↔ varietatsalgebraiques,ambl’anomenat blow-up delavarietatdefinidaper I.Enelnostrecas,comqueelspolinomisnotenen factorscomuns,lavarietatdezerosdel’ideal I ésenrealitatla«varietatbuida» quenotégaireinterèsgeomètric,peròseriainteressantentendreaquesta àlgebraperacabarconfirmantmatemàticamentelqueesveuexperimentalment: enpresènciadesingularitatsmoltespecialsdelacorbaparametritzada,la descripcióde K sesimplifica.
Vegemambmésclaredataixòquehemditsensegaireprecisióambun exemple:elcas µ = 1vaserexhaustivamentestudiatperdiversosautors: [30, 20, 3, 13].Estéque µ = 1si,isolamentsi,laparametritzacióéspròpia (ésadir,l’antiimatgedelafibragenèricade (15) técardinal1)ihihaunpunt sobrelacorba C ambmultiplicitat n 1,queéslamàximamultiplicitatque unpuntpottenirsobreunacorbadegrau n.Siésaquestelcas,llavors K té exactament n + 1generadorsminimals,unaquantitatlinealenelgraudela corba.
Pera µ = 2,LaurentBusévademostrara[3],utilitzanttècniquesdedualitat desenvolupadesperJouanoloua[34],que,peratotaparametritzaciód’una corbadegrau n queté µ = 2isolamentpuntsdoblescomasingularitats,el nucli K espotgeneraramb (n+1)(n 4) 2 + 5elementsinoambmenys.Enl’altra
CarlosD’Andrea
situació,enuntreballconjuntambTeresaCortadellas([15],vegeutambé[37]), hemdemostratquesihihaunpuntdemultiplicitatmajorque2(espot demostrarquesolamentpothaver-hiuntalpuntsingular),llavorselnombre degeneradorsde K esredueixa n+6 2 ,ésadir,queladescripciód’aquest idealésméssimpleenaquestcas.Enambduessituacions(noméspuntsdobles ounsolpuntdemultiplicitatmoltalta)s’hancalculatexplícitamentaquests generadors(vegeu[3,15,37]).
Amésamés,entotsdoscasos(µ = 1, 2),s’hanexplicitatconjuntsde generadorsminimalsde K enfunciódelaparametrització φ.Però,pera µ ≥ 3, sabemmoltpocsobrelasevaquantitatielsseusbigraus.Designemamb n0(φ) el nombrezerodeBetti de K (ésadir,elcardinaldequalsevolconjuntminimal degeneradorsd’aquestideal).A[26]vamproposarelproblemasegüent,del qualtenimencarapocsresultats:
Problema. Descriuretotselsvalorspossiblesde n0(φ) ielsparàmetresdels qualsdepènaquestafuncióperaunaparametritzaciópròpia φ coma(15).
Perevitarconfusions,recordemaquíque«propi»,enaquestcontext,significa que φ ésgenèricamentinjectiva.Comail lustraciód’aquestproblema,hem explicatmésamuntque,pera µ = 1, n0(φ) = n + 1,isi µ = 2,elvalorde n0(φ) depèndesihihaunpuntmoltsingularono.Enspreguntemsi n0(φ) és unafuncióquedepènúnicamentde n,de µ idel’estructuradepuntsmúltiples de C,osihihaencaraaltresparàmetresmésintrínsecsdelsqualsdepènaquest valor.
Unproblemamésambiciósquerefinal’anterioréselsegüent:designem amb B(φ) ⊂ N2 elconjunt(comptatsamb«multiplicitats»)delsbigrausd’un sistemaminimaldegeneradorsde K. Problema. Descriuretotselsvalorspossiblesde B(φ). Perexemple,si µ = 1,tenim(vegeu[13,teorema2.9]),
B(φ) ={(0,n),(1, 1),(1,n 1),(2,n 2),...,(n 1, 1)}
Tambéestéunadescripcióexplícitade B(φ) enelcas µ = 2(vegeu[3, 15, 37]).
Enaquestasituació,aquestconjuntdepènessencialmentdel’existènciad’una singularitatdemultiplicitatmajorque2.
Pera µ = 3,lasituacióésméscomplexa,commostral’exemplesegüent queapareixa[15]:consideremlesparametritzacions φ1 i φ2 talsquelesseves µ-basessón,respectivament,
P3,1(t0,t1,X0,X1,X2) =
Q7,1(t0,t1,X0,X1,X2) = (t
P3,2(t0,t1,X0,X1,X2) = (t3
Q7,2(t0,t1,X0,X1,X2) = (t
)X2,
Cadascunad’aquestesparametritzacionsdescriupròpiamentunacorbaenel pladegrau10quepassapelpunt (0:0:1) ambmultiplicitat7.Larestad’ells
sónobépuntsdoblesotriples.Calculantexplícitament,tenim:
B(φ1) ={(3, 1),(7, 1),(2, 3),(2, 3),(4, 2),(2, 4),(1, 6),(1, 6),(1, 6),(0, 10)},
B(φ2) ={(3, 1),(7, 1),(2, 3),(2, 3),(4, 2),(2, 4),(1, 5),(1, 6),(1, 6),(0, 10)}.
L’exempleposaenevidènciaqueengeneralelsparàmetresdelsqualsdepenen n0(φ) i B(φ) sóninvariantsmésfinsquesolamentelgraudelacorba, µ i lessingularitatsd’aquesta.Unaltreexemplecuriósquevaserestudiata[14] ésquanhihaungeneradorminimaldebigrau (1, 2) en K.Allíesmostra queenaquestasituació,si φ estàparametritzadaperpolinomisdegrau n,el conjunt B(φ) és«constant»iiguala
(0,n),(1, 2),(1,n 2),(2,n 4),..., n 1 2 , 1 , n+1 2 , 1 si n éssenar (0,n),(1, 2),(1,n 2),(2,n 4),..., n 2 , 1 , n 2 , 1 si n ésparell.
Tambéa[16]s’estudienambdetall n0(φ), B(φ) ialtresinvariantsmésprofunds deparametritzacionsdecorbes«monomials».Encadacass’obtenenresultats moltparticularsibastantdiferentsentresi.Seriainteressanttenirun«diccionari global»queenspermetientendrecomcanvienaquestesfuncions n0 i B,a mesuraqueelscoeficientsdelaparametrització φ vancanviant.
Perdefinirpròpiamentaquest«diccionari»,procedimcoma[25,secció3]: pera n ≥ 1,designemamb Vn ⊂ (K[t0,t1]n)3 elconjuntdetripletsdepolinomishomogenis u0(t0,t1),u1(t0,t1),u2(t0,t1) definintunaparametrització pròpiacoma (15).Notemqueespotconsiderar Vn comunobertenunavarietat algebraicaal’espaideparàmetresdelaparametrització φ.Encaramés, Vn podriaprendre’sessencialmentcomelquocientd’unobertdensa (K[t0,t1]n)3 vial’acciódeSL(2, K) sobreelsmonomis t0, t1.
Problema. Descriureelssubconjuntsde Vn on B(φ) ésconstant.
Notemquenaturalmentla µ-baseestàcontingudaa K i,amésamés,esté [8,proposició3.6]:
K= Pµ (t0,t1,X0,X1,X2), Qn µ (t0,t1,X0,X1,X2) : t0,t1 ∞ , osiguiqueelroldela µ-baseéscrucialperestudiar K ielsseusgeneradors. Defet,sesapquetotconjuntminimaldegeneradorsde K contéuna µ-base, aixíqueelsparells (1,µ), (1,n µ) sónsempreelementsde B(φ).Tambého és (0,n),queéselbigraudel’equacióimplícita.L’estudidelageometriade Vn comafunciódelparàmetre µ s’hafeta[25,secció3](vegeutambé[31, 21]).
Amésamés,unaanàlisimoltinteressantdela µ-based’unaparametrització, amb µ genèric(µ = n/2 )ipuntssingularsdemoltamultiplicitat,s’hafet a[22].Seriainteressanttenirresultatssimilarspera K
Enaquestcontext,unamanerapossibledemodelarunarespostaal’evidència experimentalproveïdaperSederbergielsseuscol.laboradorssobreelfetque
CarlosD’Andrea
comméssingularéslacorbaméssimpleésladescripcióde K éslasegüent: pera W ⊂ Vn designemamb W laclausurade W enlatopologiadeZariski d’aquestespai.
Conjectura. Si W1, W2 ⊂ Vn sóntalsque n0|Wi ésconstantpera i = 1, 2,i W1 ⊂ W2,llavors
Demostraraquestaconjecturaésequivalentaverificarquelafunció n0(φ) és semicontínuasuperiorment a Vn amblatopologiadeZariski.Comaconseqüènciad’aquestaafirmaciópodríemdemostrarelfetsegüent,queencaraés unproblemaobert:
Conjectura. Sigui Wµ ⊂ Vn l’obertdetoteslesparametritzacionspròpiesde corbesamb µ = n/2 italquetoteslessevessingularitatssónpuntsdobles. Llavors, n0(φ) ésconstanta Wµ ,iassoleixelseuvalormàximenaquesta varietat.
Noteuqueunrefinamentdelaprimeraconjecturaquehemfetabansamb B(W1) ⊂B(W2) nopotsercertengeneral,comhomostrenelsexemples calculatspera µ = 2a[3, 15, 37]:elsbigrausdelsgeneradorsminimalsde K enelcasmenysgenèricnoapareixenenelconjuntdebigrausdelcasgeneral.
4Solamentcorbesracionalsplanes?
Alllargd’aquesttexthemtreballatambparametritzacionsdecorbesracionals planes,peròeldissenyassistitperordinadortambémanipulacorbesisuperfíciesal’espaitridimensional,ilamajoriadelsconceptes,mètodesipropietatsque hemmostratfinsaraespodenestendreenduesdireccions.Laprimerad’elles consisteixaconsiderarparametritzacionsdesuperfíciesracionalsal’espai,és adir,aplicacionsdelaforma
φS : P2 P3 (t0 : t1 : t2) →
(t
,t1,t
) : u2(t0,t1,t2) : u3(t0,t1,t2) , (19) on ui(t0,t1,t2) ∈ K[t0,t1,t2], i = 0, 1, 2, 3,sónpolinomishomogenisdelmateix grauisensefactorscomuns.Òbviamentespodenestudiartambéaplicacions com (19) endimensionssuperiors,peròrestringiremlapresentacióaaquestcas. Elmotiupelqual φS noestànecessàriamentdefinidaentot P2 ésperquè,toti lescondicionsimposadesenelspolinomis ui(t0,t1,t2), i = 0, 1, 2, 3,l’aplicació potnoestardefinidaentotelplaprojectiu.Perexemple,si
u0(t0,t1,t2) = t1t2, u1(t0,t1,t2) = t0t2,
u2(t0,t1,t2) = t0t1,
u3(t0,t1,t2) = t0t1 + t1t2,
φS noestaràdefinidaenelconjunt {(1:0:0),(0:1:0),(0:0:1)},jaqueen aquestspuntss’anul.lentotselspolinomis ui(t0,t1,t2),0 ≤ i ≤ 3.
Peraaquestasituaciótambéhihamètodespercalcularl’equacióimplícita delaclausuradeZariskidelaimatgede φS ,anàlegsalspresentatsabansper acorbesenelpla.Perexemple,espotutilitzaruna resultantmultivariada ounaresultant esparsa (sparse enanglès)(talcomesdefineixena[23])per calcularaquestaequacióimplícita.Altreseinesdelateoriadel’eliminació, comels determinantsdecomplexos,tambépodenserutilitzadesperproduir matriustalsqueelseudeterminant(oquocientomàximcomúdivisord’alguns subdeterminants)dónaaquestpolinomi[8, 5].Enelsúltimsanyss’hanestudiat també matriusderepresentació [4, 2]d’aquestesparametritzacions,quesón matriusnonecessàriamentquadrades,d’entradespolinomials,ambrangmàxim, talsquequansónespecialitzadeslesvariablesenpuntsde P3,elrangd’aquesta matriudecreixsi,isolamentsi,elpuntestàenlasuperfície.
Elmètodedelesrectesicorbesmòbilspresentatabansperacorbesenel platéunageneralitzaciódenominada mètodedeplansisuperfíciesmòbils que segueixen φS ,itantlasevadescripciócoml’anàlisidelasevautilitatperala implicitaciósónbastantméscomplicades,jaquetantl’àlgebracomlageometria implicadesenaquestasituaciótenenmésdificultats(vegeu[38, 19, 17, 6, 35]).
Peril.lustrarund’aquestsproblemes,vegemundelsprimersobstaclesque ensapareixenenaquestesgeneralitzacions:encaraques’hademostrata[11] queexisteixunequivalentales µ-basesenaquestcontext,elseucàlculno semblatanfàcildedescriurecomhoeraenelcasdelescorbesenelpla. Partdelmotiud’aquestadificultatésqueelmòduldesizígiesorelacionsdels polinomis ui(t0,t1,t2), i = 0, 1, 2, 3,janoéslliurecomenelcasdelescorbes, aixíquenotésentitparlard’una base talcomlateníemenl’altrecas.
Totiaixò,sorprenentment,siesfa t0 = 1iesconsiderenaquestspolinomis coma«afins»en2variables,elmòduldesizígiessíqueéslliure,peròencarano éspossiblecontrolarelsgrausdelselementsd’una µ-base(se’npodenveureels detallsa[11,proposició2.1]).Algunesdescripcionsexplícitesd’aquestasituació s’hanfetperaparametritzacionsdebaixgrauoambunacertaestructura(vegeu, perexemple,[12, 47, 43, 44]),peròelpanoramageneralencaras’estàexplorant.
Unageneralitzaciódel’aplicació (18) associadaa (19) tambéésdirecta,i podríemconsiderarl’idealdedefiniciódel’àlgebradeReesassociadaa φS .Se sapmoltpocsobreelsgeneradorsminimalsdelnucli K enaquestcontext.A[13] vamestudiarelcasdeles superfíciesmonoides,quesónaquellessuperfícies racionalsquetenenunpuntamblamajormultiplicitatpossible(aquestasituació potserconsideradacomunageneralitzaciódelcas µ = 1peracorbesenel pla),iaquestsresultatsvansergeneralizatsaparametritzacionsdenominades deJonquières a[27].
Tambévamtreballara[13](vegeutambé[28])enelcasenelqualhihados plansmòbilslinealmentindependentsdegrau1quesegueixenlaparametrització,ambunesaltrescondicionsgeomètriques(unaaltrageneralitzaciópossible delcas µ = 1peralescorbes),peròladescripciógeneraldel’idealdedefinició del’àlgebradeReesperalcasdesuperfíciesésavuidiaunaàreafèrtilplena deproblemesobertsqueconvidenalasevarecerca.
CarlosD’Andrea
L’altradirecciópossibleenlageneralitzaciódeparametritzacionsdecorbes enelplaésconsiderarcorbesal’espai.Aixòvoldiraplicacionsdelaforma
φC : P1 → P3 (t
on ui(t0,t1) ∈ K[t0,t1], i = 0, 1, 2, 3,sónpolinomishomogenisdelmateixgrau en t0, t1,isensefactorsencomú.Enaquestcas,laimatgede φC ésunacorba a P3,is’hadereemplaçar«la»equacióimplícitad’abans(corbesenelpla)per «les»equacionsimplícites,jaquen’hihauràmésd’una(delamateixamanera quelesequacionsimplícitesdelarectaquepassaper (1:0:0:1) i (0:0:0:1) en P3 són X1 = 0i X2 = 0).
Talcomvaserexplicata[25],hihaunanàlegdelsteoremes2i8pera aquestasituació,aixíqueaquíhihaméseinesteòriquesicomputacionalsper estudiarinvariantsde φC .Perexemple,a[22],lessingularitatsd’unacorba espacialesvanestudiarcomafunciód’unacerta«formacanònica»dela µ-base. Altrescàlculsvanserrealitzatsa[36]perexplorargeneralitzacionsdelcas µ = 1 peracorbesespacialsiproduirgeneradorsde K enaquestcas.Peròaquests generadorsnosónminimals,iestanmoltllunydeser-ho.
Mésintentsderesoldreelproblemas’hanfeta[32, 29, 33]peraalgunsvalors específicsdegrausdelsgeneradorsdela µ-base,ienelstreballsrecents[31, 21] s’hafetunaprimeraestratificacióenfuncióde µ perestudiarcertsinvariants d’aquestesparametritzacionsenl’esperitdelsproblemesquehemproposat mésamunt.
Enconclusió,talcomseguramentellectorhapogutapreciarllegintaquest text,actualmenthihamoltaactivitatenrelacióambaquesttema,iencara moltespreguntesobertesiproblemesperresoldre.Esperemqueenunfuturno gairellunyàpuguementendredemaneramésglobaliprofundaaquesttema, isercapaçosd’aplicaraquestsresultatsaldissenyassistitperordinadoria altresàreesdelainformàtica.
Agraïments
AgraeixoaTeresaCortadellasBenítezpelscomentarisicorreccionsaunaprimeraversiód’aquesttext.Totselsgràficsenaquesttexthanestatrealitzatsper l’autorutilitzantelprograma Mathematica [48].Aquesttreballhaestatfinançat pelprojecteMTM2013-40775-PdelMinisterid’EconomiaiCompetitivitatde l’Estatespanyol.
Referències
[1] Apéry,F.;Jouanolou,J.-P. Élimination:lecasd’unevariable.París:Hermann,2006.(CollectionMéthodes)
[2] Botbol,N.;Dickenstein,A. «Implicitizationofrationalhypersurfaces vialinearsyzygies:apracticaloverview». J.SymbolicComput.,74(2016), 493–512.
[3] Busé,L. «Ontheequationsofthemovingcurveidealofarationalalgebraic planecurve». J.Algebra,321(8)(2009),2317–2344.
[4] Busé,L. «ImplicitmatrixrepresentationsofrationalBéziercurvesand surfaces». Comput.-AidedDes.,46(2014),14–24.
[5] Busé,L.;Chardin,M.;Jouanolou,J.-P. «Torsionofthesymmetricalgebra andimplicitization». Proc.Amer.Math.Soc.,137(6)(2009),1855–1865.
[6] Busé,L.;Cox,D.;D’Andrea,C. «Implicitizationofsurfacesin P3 inthe presenceofbasepoints». J.AlgebraAppl.,2(2)(2003),189–214.
[7] Busé,L.;D’Andrea,C. «Singularfactorsofrationalplanecurves». J.Algebra,357(2012),322–346.
[8] Busé,L.;Jouanolou,J.-P. «Ontheclosedimageofarationalmapandthe implicitizationproblem». J.Algebra,265(1)(2003),312–357.
[9] Capani,A.;DeDominicis,G.;Niesi,G.;Robbiano,L. «Computingminimal finitefreeresolutions». J.PureAppl.Algebra,117/118(1997),105–117.
[10] Casas-Alvero,E. «Syzygiesandprojectivegenerationofplanerational curves». J.Algebra,427(2015),183–214.
[11] Chen,F.;Cox,D.;Liu,Y. «The µ-basisandimplicitizationofarational parametricsurface». J.SymbolicComput.,39(6)(2005),689–706.
[12] Chen,F.;Shen,L.;Deng,J. «Implicitizationandparametrizationofquadraticandcubicsurfacesby µ-bases». Computing,79(2–4)(2007),131–142.
[13] CortadellasBenítez,T.;D’Andrea,C. «MinimalgeneratorsofthedefiningidealoftheReesalgebraassociatedtomonoidparameterizations». Comput.AidedGeom.Design,27(6)(2010),461–473.
[14] CortadellasBenítez,T.;D’Andrea,C. «Rationalplanecurvesparameterizablebyconics». J.Algebra,373(2013),453–480.
[15] CortadellasBenítez,T.;D’Andrea,C. «MinimalgeneratorsofthedefiningidealoftheReesalgebraassociatedwitharationalplaneparametrizationwith µ = 2». Canad.J.Math.,66(6)(2014),1225–1249.
[16] CortadellasBenítez,T.;D’Andrea,C. «TheReesalgebraofamonomial planeparametrization». J.SymbolicComput.,70(2015),71–105.
[17] Cox,D.A. «Equationsofparametriccurvesandsurfacesviasyzygies». A: Symboliccomputation:solvingequationsinalgebra,geometry,and engineering (SouthHadley,MA,2000).Providence,RI:Amer.Math.Soc., 2001,1–20.(Contemp.Math.;286)
[18] Cox,D.A. «ThemovingcurveidealandtheReesalgebra». Theoret.Comput. Sci.,392(1–3)(2008),23–36.
[19] Cox,D.;Goldman,R.;Zhang,M. «Onthevalidityofimplicitizationby movingquadricsofrationalsurfaceswithnobasepoints». J.Symbolic Comput.,29(3)(2000),419–440.
CarlosD’Andrea
[20] Cox,D.;Hoffman,J.W.;Wang,H. «SyzygiesandtheReesalgebra». J.Pure Appl.Algebra,212(7)(2008),1787–1796.
[21] Cox,D.A.;Iarrobino,A.A. «Strataofrationalspacecurves». Comput. AidedGeom.Design,32(2015),50–68.
[22] Cox,D.;Kustin,A.R.;Polini,C.;Ulrich,B. «Astudyofsingularitieson rationalcurvesviasyzygies». Mem.Amer.Math.Soc.,222(1045)(2013), 116p.
[23] Cox,D.A.;Little,J.;O’Shea,D. Usingalgebraicgeometry.2aed.Nova York:Springer,2005.(GraduateTextsinMathematics;185)
[24] Cox,D.;Little,J.;O’Shea,D. Ideals,varieties,andalgorithms.Anintroductiontocomputationalalgebraicgeometryandcommutativealgebra. 3aed.NovaYork:Springer,2007.(UndergraduateTextsinMathematics)
[25] Cox,D.A.;Sederberg,T.W.;Chen,F. «Themovinglineidealbasisofplanar rationalcurves». Comput.AidedGeom.Design,15(8)(1998),803–827.
[26] D’Andrea,C. «Movingcurveidealsofrationalplaneparametrizations».A: Computeralgebraandpolynomials.Cham:Springer,2015,30–49.(Lecture NotesinComput.Sci.;8942)
[27] Hassanzadeh,S.H.;Simis,A. «ImplicitizationofdeJonquièresparametrizations». J.Commut.Algebra,6(2)(2014),149–172.
[28] Hoffman,J.W.;Wang,H. «DefiningequationsoftheReesalgebraof certainparametricsurfaces». J.AlgebraAppl.,9(6)(2010),1033–1049.
[29] Hoffman,J.W.;Wang,H.;Jia,X.;Goldman,R. «Minimalgeneratorsfor theReesalgebraofrationalspacecurvesoftype (1, 1,d 2)». Eur.J.Pure Appl.Math.,3(4)(2010),602–632.
[30] Hong,J.;Simis,A.;Vasconcelos,W.V. «Onthehomologyoftwo-dimensionalelimination». J.SymbolicComput.,43(4)(2008),275–292.
[31] Iarrobino,A. «Strataofvectorspacesofformsin R = k[x,y],andof rationalcurvesin Pk». Bull.Braz.Math.Soc.(N.S.),45(4)(2014),711–725.
[32] Jia,X.;Goldman,R. «µ-basesandsingularitiesofrationalplanarcurves». Comput.AidedGeom.Design,26(9)(2009),970–988.
[33] Jia,X.;Wang,H.;Goldman,R. «Set-theoreticgeneratorsofrationalspace curves». J.SymbolicComput.,45(4)(2010),414–433.
[34] Jouanolou,J.P. «Formesd’inertieetrésultant:unformulaire». Adv.Math., 126(2)(1997),119–250.
[35] Khetan,A.;D’Andrea,C. «Implicitizationofrationalsurfacesusingtoric varieties». J.Algebra,303(2)(2006),543–565.
[36] Kustin,A.R.;Polini,C.;Ulrich,B. «Rationalnormalscrollsandthe definingequationsofReesalgebras». J.ReineAngew.Math.,650(2011), 23–65.
[37] Kustin,A.;Polini,C.;Ulrich,B. «Thebi-gradedstructureofsymmetric algebraswithapplicationstoReesrings». J.Algebra,469(2017),188–250.
[38] Sederberg,T.W.;Chen,F. «Implicitizationusingmovingcurvesand surfaces».A: Mair,S.G.;Cook,R. (ed.). SIGGRAPH’95Proceedingsofthe 22ndannualconferenceoncomputergraphicsandinteractivetechniques NovaYork:ACM,1995,301–308.
[39] Sederberg,T.;Goldman,R.;Du,H. «Implicitizingrationalcurvesbythe methodofmovingalgebraiccurves». J.SymbolicComput.,23(2–3)(1997), 153–175.
[40] Sederberg,T.W.;Saito,T.;Qi,D.X.;Klimaszewski,K.S. «Curveimplicitizationusingmovinglines». Comput.AidedGeom.Design,11(6)(1994), 687–706.
[41] Sendra,J.R.;Winkler,F. «Symbolicparametrizationofcurves». J.Symbolic Comput.,12(6)(1991),607–631.
[42] Sendra,J.R.;Winkler,F.;Pérez-Díaz,S. Rationalalgebraiccurves.A computeralgebraapproach.Berlín:Springer,2008.(AlgorithmsandComputationinMathematics;22)
[43] Shi,X.;Goldman,R. «Implicitizingrationalsurfacesofrevolutionusing µ-bases». Comput.AidedGeom.Design,29(6)(2012),348–362.
[44] Shi,X.;Wang,X.;Goldman,R. «Using µ-basestoimplicitizerational surfaceswithapairoforthogonaldirectrices». Comput.AidedGeom. Design,29(7)(2012),541–554.
[45] Sylvester,J.J. «Onatheoryofsyzygeticrelationsoftworationalintegral functions,comprisinganapplicationtothetheoryofSturm’sfunctionand thatofthegreatestalgebraicalcommonmeasure». PhilosophicalTransactionsoftheRoyalSocietyofLondon,partIII(1853),407–548.Tambépublicat a CollectedMathematicalPapersofJamesJosephSylvester.Vol.1.Chelsea PublishingCo.,1973,429–586.
[46] vanHoeij,M. «Rationalparametrizationsofalgebraiccurvesusinga canonicaldivisor». J.SymbolicComput.,23(2–3)(1997),209–227.
[47] Wang,X.;Chen,F. «Implicitization,parameterizationandsingularitycomputationofSteinersurfacesusingmovingsurfaces». J.SymbolicComput., 47(6)(2012),733–750.
[48] WolframResearch,Inc. Mathematica.Version8.0.Champaign,IL,2010.
[49] Zhang,M.;Chionh,E.-W.;Goldman,R.N. «Onarelationshipbetweenthe movinglineandmovingconiccoefficientmatrices». Comput.AidedGeom. Design,16(6)(1999),517–527.
DepartamentdeMatemàtiquesiInformàtica
UniversitatdeBarcelona GranVia585,08007Barcelona
cdandrea@ub.edu
http://atlas.mat.ub.es/personals/dandrea
ButlletídelaSocietatCatalanadeMatemàtiques Vol.31,núm.2,2016.Pàg.143–178. DOI:10.2436/20.2002.01.70
Detecciód’onesgravitatòries
JoanGirbau
ÉsperlaMentquesem’obraNatura Al’ullgolós;perellaemséimmortal Puixquel’ordén,iençàiallàdelmal, Eltempsésúipelmeuordredura.
J.V.Foix(1893–1987)
Resum: L’objectiud’aquestarticleéspresentarlateoriabàsicad’onesgravitatòries iexplicar,peraunlectormatemàticquetinguialgunsconeixementsderelativitat general,elsmètodesqueespodenusarperdetectar-les.Explicaremtambéelstrets fonamentalsdel’observaciódutaatermeel14desetembrede2015pelsdetectorsde LIGO.
Paraulesclau: gravitació,onesgravitacionals,GW150914.
ClassificacióMSC2010: 83C35.
Introducció
L’11defebrerde2016elwebdeLIGO(LaserInterferometerGravitational-waves Observatory)publicavalanotíciasegüent:«El14desetembrede2015ales5:51, horadel’Est(9:51detempsuniversalcoordinat),elsdosdetectorsbessonsde LIGOsituats,respectivament,aLivingston(Louisiana)iHanford(Washington) vanmesurarondulacionsenelteixitdel’espaitemps—onesgravitacionals— quearribavenalaTerraprocedentsd’uncataclismeenl’Universllunyà.Els dosdetectorsdeLIGOacabavend’entrarenfuncionamentperalesprimeres observacionsquanaquellsenyalforticlarvasercaptat».L’endemàd’aquesta notíciaelpresidentObamafelicitaval’equipdecientíficsdeLIGOambeltuit següent:«Einsteinteniaraó!Felicitatsa@NSFi@LIGOperladetecciód’ones gravitacionals,unavençgegantíenlanostracomprensiódel’Univers».
JoanGirbau
Lahistòriadelesonesgravitatòriescomençael1916,arafaunsegle.Aquell anyEinsteinvapublicarelsarticles[7]i[8],onintrodueixlarelativitatgeneral iestableixquelespertorbacionsgravitacionalsespropaguenperonesala velocitatdelallum.Malgratquemaifinsaranos’haviendetectatdirectament,sí quesen’haviademostratl’existènciapelsseusefectes.L’any1974,JosephTaylor iRussellHuslevanobservarduesestrellesdeneutronsquegiravenl’unaentorn del’altracadavegadamésdepressaseguintunmodeldepèrduad’energia peremissiód’onesgravitatòries.Lataxad’acceleraciócausadaperlasuposada emissiód’ones,d’acordamblarelativitatgeneral,coincidiaexactamentamb lesobservacions.Peraquestdescobriment,TayloriHuslevanrebreelNobelde Físical’any1993.
Desdeprincipidelsegleactualhanentratenfuncionamentdiversosobservatorisdedicatsaladetecciód’onesgravitatòriesperinterferometria.LIGO,als EstatsUnits,éselmésanticimésgran.Vaentrarenfuncionamentel2002,però haestatremodelatmoltrecentment(AdvancedLIGO).Tambéhihadetectorsa Itàlia(VIRGO),aAlemanya(GEO600)ialJapó(TAMA300).Icalremarcarque l’AgènciaEuropeadel’Espai,encol.laboracióamblaNASA,haposatenòrbita recentment(el2dedesembrede2015)undetectorespacialmoltambiciós anomenatLaserInterferometerSpaceAntenna(LISA).
Ambladetecciód’onesgravitacionalsrealitzadaperLIGOs’obreunanova eraenelnostreconeixementdel’Univers.Enefecte,lesonesgravitatòriesens podenaportarunainformacióquelesoneselectromagnètiquesnoenspoden donar.Perexemple,enl’explosiód’unasupernovalesoneselectromagnètiques sóndispersadesunavegadaiunaaltraperlamatèriaquerodejal’estrella;les onesgravitatòries,no.Delamateixamanera,nopodemesperarcapinformació delsprimersmomentsdel’Universatravésd’oneselectromagnètiques(la famosaradiaciócòsmicadefonsnomésensaportainformaciódel’anomenada èpocadelarecombinació,entre200000i300000anysdesprésdelBigBang), peròatravésdelesonesgravitacionals,sí.
L’objectiud’aquestarticleéspresentarlateoriabàsicad’onesgravitatòries iexplicarelsmètodesqueespodenusarperdetectar-les.Nocaldirquehi haunaamplíssimabibliografiadellibresirevistessobreeltema.Vegeu,per exemple[13, 14],apartdelsarticlesrecentssobreladeteccióconcretad’ones realitzadaperLIGOel14desetembrede2015[1, 2, 3, 4].Oferimaquíuna presentaciódetalladadelstretsbàsicsdelateoria(ambdemostracionsrigoroses delsfetsrellevants)peraunlectormatemàticquetinguialgunsconeixements derelativitatgeneral.
1Preliminarsmatemàtics
Enaquestasecciótractaremalgunstemesmatemàticsqueconvérecordarabans d’abordarlaqüestiócentrald’aquestarticle,queésl’existènciaielsmètodes dedetecciódelesonesgravitatòries.
1.1Onesperiòdiquesplanes
Sigui n unvectorunitaride R3 i a unnúmeroreal.Designaremper Pn,a elpla de R3 donatper Pn,a ={x ∈ R3 talsque x · n = a}.
Una onaperiòdicaiplana de R3 ésunafunció
A : R3 × R → R (x,t) → A(x,t)
quecompleixlespropietatssegüents:
1. Existeixunvectorunitari n (anomenat direcciódepropagació)talquesi x1, x2 ∈ Pn,a,llavors A(x1,t) = A(x2,t) peratot t.Ésadir,dospunts delmateixpla Pn,a tenensempreelmateixvalorde A.
2. Existeixunnúmeroreal v,anomenat velocitatdepropagació,talquesi posem v = vn escompleix A(x + vτ,t + τ) = A(x,t) peratots x, t, τ. Aixòesllegeixdientqueelvalordel’onaal’instant t enelpunt x ésel mateixqueelvalorenelpunt x + vτ al’instant t + τ.
3. A(0,t) ésunafuncióperiòdicade t.
Proposició1. Unaonaperiòdicaiplana, A : R3 ×R → R,sempreespotexpressar delaforma A(x,t) = f(ωt k · x),on f : R → R ésunafuncióperiòdicade període 2π , ω ésunnúmeroreali k éselvector (ω/v)n.Elvector k s’anomena vectord’ona i ω s’anomena freqüènciaangular.
Prova. Sigui A : R3 ×R → R unaonaperiòdicaiplanadevectordepropagació n ivelocitatdepropagació v.Sigui g(t) = A(0,t),queésunafuncióperiòdica.
Sigui T elseuperíode.Posem ω = 2π/T .Definim f(t) = g(t/ω).Llavors f(t) ésperiòdicadeperíode2π .
Fixat x ∈ R3,sigui u = x (x · n)n,demaneraque x s’expressacoma suma x = u + (x · n)n.Tindrem
A(x,t) = A(u + (x · n)n,t) = A u + vn x · n v ,t = A u,t x · n v .
Arabé,comque u estàsobreelplad’equació u · n = 0quecontél’origen, resulta
A(x,t) = A u,t x n v = A 0,t x n v = g t x n v = f ωt ω(x n) v
Siposem k = ωn/v,obtindrem A(x,t) = f(ωt k · x). ✷
Exemple. L’exempletípicd’onaperiòdicaiplanaésl’onadelaforma A(x,t) = A0 cos(ωt k·x +ϕ),on k ésuncertvectorde R3 i ω, ϕ i A0 sónnúmerosreals. Fentuncanvid’origendetemps,l’onaanteriors’expressacoma A0 cos(ωt k·x) (obécoma A0 sin(ωt k · x)).Percomoditat,estreballaambl’onacomplexa ϕ(x,t) = A0ei(ωt k x)
JoanGirbau
delaqual A0 cos(ωt k · x) éslapartreal.Tambéespottreballaramb
ψ(x,t) = A0ei(k x ωt) quetélamateixapartreal.
Calremarcarquelasumadeduesonesperiòdiquesiplanesnoésunaona periòdicaiplana.
1.2Algunsconceptesrelatiusalesvarietatspseudoriemannianes
Comencemrecordantqueunavarietatpseudoriemanniana (M,g) esdefineix demaneraanàlogaaunavarietatriemanniana,ambl’únicadiferènciaqueels productesescalars gx ,queenlesvarietatsriemannianess’exigeixquesiguin definitspositiusperacada x ∈ M,enlespseudoriemannianesnomésesdemana quesiguinnosingulars(aixòvoldirque gx (u,v) = 0peratot u implica v = 0).
Sibésuposaremconegudesdellectorlesnocionsbàsiquessobrevarietats pseudoriemannianes,explicitaremaraalgunespropietatsquenecessitaremi que,pelfetdenoformarpartdelsconeixementsconsideratsmésbàsics,poden serdesconegudesdellector.
1.2.1CampsdeJacobienvarietatspseudoriemannianes Sigui γ(t) una corbad’unavarietatpseudoriemanniana (M,g).Suposemque t variaenun intervaltancat I = [a,b].Una variaciódelacorba γ ésunaaplicaciócontínua
α : ( ε,ε) × I → M (s,t) → α(s,t), diferenciableencadapuntinteriorde ( ε,ε) × I,quecompleix α(0,t) = γ(t). Peracada (s0,t0) ∈ ( ε,ε) × I definimelsvectors ∂/∂s i ∂/∂t del’espai tangent Tα(s0,t0)(M) comelsvectorsrespectivamenttangentsalescorbes s → α(s,t0) i t → α(s0,t) (nomésserancampsdefinitssobrelaimatgede α).El camp ∂/∂s s’anomena camptransversdelavariació
Consideremaraunageodèsica γ(t) de (M,g) iunavariació α de γ que compleixilacondicióqueperacada s lacorba t → α(s,t) siguigeodèsica.
Unatalvariaciódiremqueésuna variacióde γ pergeodèsiques iprovarem quecompleixlapropietatsegüent:
Enefecte,comquelesderivadesparcialscommuten,esté [∂/∂t,∂/∂s] = 0, i,pertant,
Resulta,doncs,
Peròcomquetoteslescorbes t → α(s,t) sóngeodèsiques,esté ∇∂/∂t ∂/∂t = 0 ilaigualtatanterioresconverteixen(1).
Laigualtat (1) s’utilitzaperdefinirelconceptede campdeJacobi alllarg d’unageodèsica:
Definició2. Sigui γ unageodèsicade (M,g).Uncampvectorial ξ sobrela corbas’anomena campdeJacobi sicompleixl’equació
Elscàlculsanteriorsdemostrenelteoremasegüent:
Teorema3. Larestricciósobreunageodèsicadelcamptransversd’unavariació d’aquestageodèsicapergeodèsiquesésuncampdeJacobi.
Elrecíprocd’aquestteoremaéstambécert,dedemostraciórelativament senzilla,perònosaltresnoelnecessitarem.
1.2.2DerivadadeLie LaderivadadeLie LX K d’uncamptensorial K respecte auncampvectorial X esdefineixdelamanerasegüent:Sigui {ϕt } elgrup uniparamètriclocaldetransformacionsassociatalcampvectorial X LX K ésel camptensorialdelmateixtipusqueelcamp K queencadapunt x ∈ M val
(LX K)x = lim t→0 1 t ((dϕt ) 1(Kϕt (x)) Kx ).
Esdemostraquesi Y ésuncampvectorial, LX Y = [X,Y],iquesi f és unafunció, LX (f) = X(f).Tambéesdemostraque LX ésunaderivacióque commutaamblescontraccions,i,pertant,si α ésuncamptensorialdues vegadescovariant,homté:
(LX α)(Y,Z) = X(α(Y,Z)) α([X,Y],Z) α(Y,[X,Z]). (2)
MalgratqueelconceptedederivadadeLieésunconceptepropideles varietatsdiferenciables,sensecapestructuraaddicional,enelcasqueestiguem enunavarietatpseudoriemannianaaquestaexpressióespotescriured’una altramanera,talcomensasseguralaproposiciósegüent:
Proposició4. Si α ésuntensorduesvegadescovariantenunavarietatpseudoriemannniana,escompleix
(LX α)(Y,Z) = (∇X α)(Y,Z) + α(∇Y X,Z) + α(Y, ∇Z X).
Prova. Laderivadacovariantde α tél’expressiósegüent(similara(2)):
(∇X α)(Y,Z) = X(α(Y,Z)) α(∇X Y,Z) α(Y, ∇X Z).
JoanGirbau
Aïllantd’aquí X(α(Y,Z)) isubstituint ∇X Y per ∇Y X + [X,Y] i ∇X Z per
∇Z X + [Z,X],s’obté
X(α(Y,Z)) = (∇X α)(Y,Z)+α(∇Y X,Z)+α(Y, ∇Z X)+α([X,Y],Z)+α(Y,[X,Z]).
Substituintaixòa(2)resultal’expressiódesitjada. ✷
Corol.lari5. Enunavarietatpseudoriemanniana (M,g) homté
(LX g)(Y,Z) = g(∇Y X,Z) + g(Y, ∇Z X).
Prova. Bastaaplicarlaproposicióanterioraltensormètric g tenintencompte que ∇X g = 0peraqualsevolcampvectorial X. ✷
1.2.3Pertorbaciódelacurvaturaproduïdaperunapertorbaciódelamètrica Sigui (M,g) unavarietatpseudoriemannianadedimensió n.Sigui g unaaltramètricapseudoriemannianapròximaa g,delaforma g = g + h
L’objectiud’aquestaseccióésestablirunresultat(teorema6)queexpresside maneraaproximadaelstensorsdecurvaturaideRiccide g enfuncióde h i delstensorscorresponentsde g.
Designemper ∇ laconnexióassociadaa g iper ∇ laconnexióassociada a g .Posem
Q(X,Y) =∇X Y −∇X Y, on X i Y sóncampsvectorials.Si f ésunafunció,llavors
Q(X,fY) =∇X (fY)−∇X (fY) = X(f)Y +f ∇X Y X(f)Y f ∇X Y = fQ(X,Y).
Igualmentesprovaque Q(fX,Y) = fQ(X,Y) ique Q(X,Y) = Q(Y,X). Així,doncs, Q ésuncamptensorialduesvegadescovariantiunavegada contravariant,simètricenelsfactorscovariants.Designemper R (X,Y)Z el tensordecurvaturade g iper R(X,Y)Z elde g.Volemaraexpressarla diferènciaentreelsdostensorsdecurvatura(elde g ielde g)enfunciódel tensor Q.Tindrem:
R (X,Y)Z=∇X ∇Y Z −∇Y ∇X Z −∇[X,Y]Z = =∇X (∇Y Z +Q(Y,Z))−∇Y (∇X Z +Q(X,Z))−∇[X,Y]Z Q([X,Y],Z) = =∇X ∇Y Z + Q(X, ∇Y Z) +∇X Q(Y,Z) + Q(X,Q(Y,Z))
elmateix,permutant X i Y −∇[X,Y]Z Q([X,Y],Z) = = R(X,Y)Z + Q(X, ∇Y Z) +∇X Q(Y,Z) + Q(X,Q(Y,Z))
elmateix,permutant X i Y Q([X,Y],Z).
Recordemque ∇X Q s’expressadelaformasegüent: (∇X Q)(Y,Z) =∇X (Q(Y,Z)) Q(∇X Y,Z) Q(Y, ∇X Z).
Sial’expressióanteriorde R (X,Y)Z substituïmelterme ∇X Q(Y,Z) per (∇X Q)(Y,Z) + Q(∇X Y,Z) + Q(Y, ∇X Z),tindrem:
R (X,Y)Z = R(X,Y)Z + (∇X Q)(Y,Z) (∇Y Q)(X,Z)+ + Q(X,Q(Y,Z)) Q(Y,Q(X,Z)). (3)
Voldríemexpressararaaquestamateixafórmulaencomponents,peròabans hauríemdeprecisarlesnotacionsqueusaremrelativesalescomponentsd’un tensor.Enprimerllocconvindremqueíndexsrepetitsadaltiabaixindicaran sempreques’hadesumarrespecteaaquestsíndexs(malgratques’hagisuprimit elsumatori).D’altrabanda,si t ésuntensor r vegadescontravarianti s vegades covariant,queenunacartalocals’expressa
(recordemqueperlaconvencióanteriornoexplicitemelssumatoris),designaremper ∇iti1...ir j1...js lescomponentsdeladerivadacovariant ∇∂/∂xi t.Ésadir:
Hauremdeprecisartambélaconvencióquefemservirperescriurel’ordre delsíndexsdelescomponentsdeltensordecurvatura:
Ambaquestesconvencions,expressemaralafórmula(3)encomponents: R r ijk = R
Voldríemexpressareltensor Q enfunciódelamètricainicial g ide h (recordeuque g = g + h).Hemd’utilitzararalabenconegudafórmulade Riemannquedónaladerivadacovariantenfunciódelamètrica:
g(∇X Y,Z) = 1 2 {X(g(Y,Z)) + Y(g(Z,X)) Z(g(X,Y)) g(X,[Y,Z]) g(Y,[X,Z]) g(Z,[Y,X])}. (5)
Utilitzantaquestafórmulatindrem:
2g (Q(X,Y),Z) = 2g (∇X Y −∇X Y,Z) = = X(g (Y,Z)) + Y(g (Z,X)) Z(g (X,Y)) g (X,[Y,Z]) g (Y,[X,Z]) g (Z,[Y,X]) 2g (∇X Y,Z).
JoanGirbau
Substituintaquí g per g + h iutilitzantunaaltravegadalafórmulade Riemann(5),ensqueda:
2g (Q(X,Y),Z) = X(h(Y,Z)) + Y(h(Z,X)) Z(h(X,Y)) h(X,[Y,Z]) h(Y,[X,Z]) h(Z,[Y,X]) 2h(∇X Y,Z).
Substituïmaraelterme X(h(Y,Z)) d’aquestaexpressióper (∇X h)(Y,Z) + h(∇X Y,Z) + h(Y, ∇X Z),ielstermes Y(h(Z,X)) i Z(h(X,Y)) perexpressions similars.Ensqueda,finalment:
2g (Q(X,Y),Z) = (∇X h)(Y,Z) + (∇Y h)(Z,X) (∇Z h)(X,Y).
Aquestafórmulas’expressaencomponentsdelamanerasegüent:
Qi jk = 1 2 g il(∇j hkl +∇khlj
on (g il) indica,comsempre,lamatriuinversade (gil).
Pertenir Q enfuncióde g ide h talcomvolem,hauríemd’expressarenla fórmulaanteriorlamatriuinversa (g il) de (gil) enfunciódelamètricainicial g ide h.Noperseguimunafórmulaexacta,sinóqueensacontentaremambuna expressióaproximadatenintencomptequesuposemqueladiferència h entre g i g éspetitaitéderivadespetites(mésendavantjaprecisaremelsentit d’aquestesparaules).De g = g + h = g(1 + g 1h),on1indicalamatriu identitat,deduïm g −1 = (1 + g 1h) 1g 1.Designemper H lamatriu g 1h. Comque (1 + H) 1 = 1 H + H2 H3 +··· , negligintelstermesd’ordre > 1en h,tindrem g −1 = (1 + H) 1g 1 ≈ g 1 Hg 1 = g 1 g 1hg 1.Pertant:
D’araendavantutilitzaremlamètricainicial g peridentificarcadaespai tangentambelseudual.Aixòenspermetràidentificar,quanensconvingui, tensorscovariantsicontravariants(pujaremibaixaremíndexsutilitzantla mètricainicial g).Lafórmulaanteriors’escriullavors: g jk ≈ gjk hjk (8)
Substituintaquestaexpressióa (6) isuprimintelstermesd’ordre > 1en h, obtindrem: Qi jk ≈ 1 2 gil(∇j hkl +∇khlj −∇lhjk). (9)
Quansubstituïmaquestaexpressióa (4),elstermesenelsqualshihaun productededues Q resultarand’ordre > 1en h.Pertant,noméshauremde
calcularenfuncióde h elstermesquecontenenunaderivadacovariantde Q Operant,tenimfinalment:
D’aquestafórmulapodemobtenirlescomponentsdeltensordeRicciper contracciódelsíndexs r , j,jaque Rik = Rr irk.Operantensqueda
ontr h designalatraçade h,osigui, grlhrl. Podemresumirtotelquehemfetenelteoremasegüent:
Teorema6. Sigui (M,g) unavarietatpseudoriemanniana.Sigui h uncamp tensoriald’ordre 2,simètric,talque g = g + h continuïsentunamètrica pseudoriemanniana.AleshoreseltensordecurvaturaieltensordeRiccide g s’expressenenfunciódelstensorscorresponentsde g perlesfórmules (10) i (11), onelsímbol ≈ significaqueelsmembresquefigurenaladretaial’esquerradel símboldifereixenenunterme T(h) quedepènde h,talque limt→0 T(th)/t = 0 (ésadir,untermed’ordre > 1 en h).
2Rudimentsderelativitatgeneral
L’any1905,Einsteinvaintroduirlarelativitatespecial[5, 6].Peròelseuplantejamentdeixavalagravitacióforadelcampd’estudidelateoria.Defet,el mateixEinsteinvanecessitaronzeanyspertrobarlamanerad’incloure-hiels fenòmensgravitatoris,iaixòvadonarllocalarelativitatgeneral,presentada el1916[7].Perarribaraaquestafitavasernecessari,però,queHermann Minkowskidescobrísel1908[12]quelestransformacionsdeLorentzqueestan alabasedelarelativitatespecialsónisometriesde R4 respecteaunproducte escalarqueavuiesconeixambelseunom.Aquestfetpermetiainterpretartots elsfenòmensdelarelativitatespecialdesd’unpuntdevistageomètric,a R4 . Aprofitantaquestpuntdevista,Einstein,quejas’haviaadonatquelaforça gravitatòriaassociadaalamatèrianoésunconceptefísicintrínsec,sinóque ésfruitd’unaeleccióparticulardelssistemesdecoordenades,vasercapaçde formulardemaneraprecisalateoriaqueexplicaelcomportamentdelscamps gravitatoris.Vadescobrirqueuntalcampnofaaltracosaquedeformarla mètricadel’espaitemps,quedeixadeserladeMinkowskiipassaaseruna determinadamètricadeLorentz.L’equació(enderivadesparcials)querelaciona lamatèriaquecreaelcampgravitatoriambaquestamètricadeLorentzes coneixambelnomd’equaciód’Einsteindelagravitació (equacióquesubstitueix lafamosalleideNewtonenelmarcdelarelativitat).
JoanGirbau
Ellectorquedesitgiadquirirelsconeixementsbàsicsdelarelativitatgeneral téal’abastunainfinitatdellibresiarticles.Nosaltresrecomanem,perexemple, elssegüents:[10],[13]ielcapítol ii de[11].Malgratqueelllibre[11]queacabem decitarésmoltespecialitzat,elseucapítol ii ofereixunapresentacióforça intuïtivadelarelativitat,tantdel’especialcomdelageneral.
RecordemqueunavarietatdeLorentzésunavarietatpseudoriemanniana (V,g),on V ésunavarietatdiferenciablededimensió4i g ésuncamp tensorialdiferenciable,covariant,d’ordre2,simètric,queencadapunt x ∈ V dónallocaunproducteescalarde Tx (V) (quedepèndiferenciablementde x) nosingularid’índex1.Aixòvoldirqueencadapunt x ∈ V espottrobar unabasede Tx (V) enlaquallamatriudelproducteescalar gx siguilamatriu diagonaldiag[1, 1, 1, 1].
Encadapunt x ∈ V espodendefinirelsconceptesde vectortemporal, vector espacial i vectorlumínic delamanerasegüent:unvector v ∈ Tx (V) éstemporal si gx (v,v)< 0,ésespacialsi gx (v,v)> 0iéslumínicsi gx (v,v) = 0.
EnelcontextdelesvarietatsdeLorentz,quanusemlletresgreguesperdesignaríndexs,suposaremquevariend’1a4,iquanusemíndexsllatins,suposarem quevariend’1a3.Perexemple,unsistemadecoordenades (x1,x2,x3,x4) el podemescriure (xα).
Enelmarcdelarelativitatgeneral,lafísicadequalsevolsistemaqueactua sotal’acciód’uncampgravitatoriesrepresentasempreenunacertavarietat deLorentz (V,g),dotadad’unaorientaciótemporalid’uncamptensorial covariant T ,d’ordre2,simètric,quedescriulamatèriaresponsabledelcamp gravitatori.Aquesttensor T ,ques’anomena tensord’impulsió-energia,està relacionatamblamètricadeLorentz g perlesequacions(d’Einstein)següents:
on Ric(g) designaeltensordeRiccidelamètrica g, R(g) designalaseva curvaturaescalar, Λ ésunacertaconstantanomenada constantcosmològica, G éslaconstantdegravitaciódeNewtoni c éslavelocitatdelallum.
Laconstantcosmològica Λ téunvalormoltpetitquenoméséssignificatiu enproblemescosmològicsenquèintervenendistàncies(detempsod’espai) moltgrans.Malgratquelesonesgravitatòriesqueestudiarempodenprovenir d’estrellesmoltllunyanes,nosaltresensinteressaremnoméspelseucomportamentaraiaquí,ienaquestsentitpodemsuposarsensecaprecançaque Λ = 0.
Unaaltramanerad’escriurelaprimeraequacióde (12) enelnostrecasésla següent:
(g) = χ T 1 2 (trg T)g , (13)
on χ designalaconstant8πG/c4 i trg T designalatraçade T respectea lamètrica g.Enefecte,laprimeraequacióde (12),amb Λ = 0,s’escriuen coordenades:
Sigui (gαβ) lamatriuinversade (gαβ).Multiplicantlaigualtatanteriorper gαβ isumantrespectea α i β,s’obté
2R = χ tr T.
Pertant, R =−χ tr T .Substituintaquestvaloralaprimeraequacióde (12) (amb Λ = 0)s’obté(13).
3Observadorsencaigudalliure:conceptesbàsics
Consideremunobservadorencaigudalliuresotal’acciód’uncertcampgravitatori.Hemditquelafísicadelsfenòmensques’esdevenensotal’acciód’aquest campgravitatori,dintredelmarcdelarelativitatgeneral,ésdescritaperunacertavarietatdeLorentz (V,g) dotadad’unaorientaciótemporal.Lavidad’aquest observadorvindràrepresentadaperunacertacorba γ(t) de V devectortangent temporalqueapuntacapalfutur.Sesuposaqueelparàmetre t éseltemps propidel’observador.Aixòvoldirque g(˙ γ(t), ˙ γ(t)) =−c2 (otambé,quela normade γ és g(γ, γ) = ic).Elfetquel’observadorestiguiencaigudalliure estradueixenelfetquelacorba γ(t) ésgeodèsica.
Enqualsevolinstant t0 delseutempspropi,l’espaidetresdimensions del’observadorésl’espai Et0 ortogonalalvector γ(t0) dintredel’espaitangent Tγ(t0)(V).Comqueenprincipiaquestespaitangentnoestàinclòsenla varietat,l’«espai»del’observadorenqualsevolinstanttampocnohoestài,per tant,elsseuspuntsnosónesdevenimentsfísics.Aquestfetpotsorprendre unamica.Però,pensemquequanjoesticparlantambunamicsituata1metre meu,elquejoveigd’ells’haesdevingut3.3 × 10 9 segonsabans,ilesparaules quearajosentohansortitdelasevaboca0 003segonsabans.Comquejosóc incapaçdedetectaraquestsintervalstanpetitsdetemps,tinclasensacióque elmeuamicestàenelmeumateixespaiaramateix,encaraquelarealitatfísica delmeuamicconversantambmiésbendiferent,iseriaencaramésdiferent sielmeuamicestiguésa2metresdemi.Totaixòésperdirquel’espaide tresdimensionsonjoara(al’instant t = t0)situoelmeuamicésquelcom quenoexisteixfísicament,iqueéslògicqueelmodelitzemcomunsubespai del’espaitangentdel’espaitempsenelpunt γ(t0),unacosaquenoforma partdelavarietatonsituemelsesdevenimentsfísics.Sivolguésconsiderar queelmeuespaidetresdimensionsenuninstant t0 delmeutempspropi ésquelcomonespodensituarelsesdevenimentsfísicsquepassenenaquell instant,hauriad’identificard’algunamaneral’espai Et0 ambalgunasubvarietat detresdimensionsde V .O,simésno,uncertentorn Ut0 del’origende Et0 ambalgunasubvarietat St0 de V .Lamaneradeferaixòques’adiumésamb laintuïcióésatravésdel’aplicacióques’anomena exponencialgeodèsica,que nosaltresdesignaremper ϕt0 idelaqualrecordaremacontinuacióladefinició.
JoanGirbau
Donatunvector v ∈ Et0 ,sigui v elvectorunitari v/ v ,on v = gγ(t0)(v,v).Sigui s → zt0 (s, ˜ v) l’únicageodèsicatalque zt0 (0, ˜ v) = γ(t0) ique zt0 (0, v) = v,on zt0 indicaelvectortangentenaquellpunt.Comque elvector ˜ v ésunitari,lageodèsica s → zt0 (s, ˜ v) estaràparametritzadaperla longituddel’arcdecorbacomprèsentre zt0 (0, ˜ v) i zt0 (s, ˜ v) (aixòs’abreuja dientqueestàparametritzadaperl’arc).Sigui ϕt0 l’aplicacióde Et0 alavarietat V queacada v ∈ Et0 facorrespondreelpunt zt0 ( v , ˜ v).Comquela geodèsica s → zt0 (s, v) potnoestardefinidaperatot s,l’aplicació ϕt0 potno estardefinidasobretot Et0 ,peròsíquehoestaràenunacertabolaoberta Ut0 de Et0 decentrel’origeniradi δt0 .Posem St0 = ϕt0 (Ut0 ).Observeuquesiidentifiquemelspuntsde Ut0 ambelsde St0 atravésde ϕt0 ,lalongitudd’uncert radide Ut0 queuneixl’origenambuncert v seràigualaladistànciageodèsica a St0 entre ϕt0 (v) i γ(t0).
Siconsideremuntrosfinitdelavidadel’observadorcomprèsentredos instantsdetemps, a ≤ t ≤ b,espotdemostrarqueéspossibletrobarunsol δ demaneraque,peratot t ∈ [a,b], ϕt estiguidefinidasobrelabolaoberta Ut de Et deradi δ (osigui,unradicomúperatotesles ϕt ).
Estemaraencondicionsdedefinirunsistemadecoordenadesquedenominarem coordenadesadaptadesal’observador iquetradueixgeomètricament enelmarcdelavarietatdeLorentz (V,g) lasituaciósegüent:
Suposemquejovaigdintred’unanauespacialencaigudalliureal’interiordelaqualhihatreseixosperpendicularsdecoordenades,iquejoem troboal’origend’aquestseixos.Mitjançantaquestareferènciapucdescriure encadamomentlaposiciódequalsevolobjectedintredelanaupelsquatre números (x1,x2,x3,t),onelstresprimerssónlescoordenadesdel’objectea l’instant t delmeutempspropi.
Comestradueixaquestasituacióenelmarcgeomètricdelavarietat (V,g), tenintencomptequeelseixosnopodenestaralavarietatsinóalsespais tangentsenelsdiversospuntscorresponentsalsdiversosinstantsdelameva vida?
Lamevavidaésdescritaperunageodèsica γ(t) de V devectortangent temporalqueapuntacapalfutur,corbaquesuposoparametritzadapelmeu tempspropi.Elstreseixosqueviatgenambmidonaranllocatrescamps vectorials e1(t), e2(t), e3(t) sobrelacorba γ(t).Elfetqueelstreseixosestiguin quiets,sensegirardurantelviatge,esmodelitzaimposantquesónparal.lelsal llargdelacorba,ésadir, ∇γ ei = 0.Enrelacióambaixò,caltenirencompteque sifixemuninstant t0 ifixemtresvectors e1, e2, e3 de Et0 = ˙ γ(t0) ⊥ queformin unabaseortonormal,existeixenunsúnicscamps e1(t), e2(t), e3(t) sobrela corba,paral.lels,quepera t = t0 coincideixenambelsvectors e1, e2, e3 donats. Pelfetdeserparal lelspertanyerana Et iseranbaseortonormald’aquestespai peratot t.
Fixatsdosinstants a i b delmeutemps,amb a<b,sigui δ unnúmero positiutalque,peratot t ∈ [a,b], ϕt estiguidefinidasobrelabolaoberta Ut de Et deradi δ.Siguin a i b dosaltresnúmerostalsque a<a <b <b (puc
pensarque a éspropera a i b propera b).Sigui U labolaobertade R3 de radi δ icentrel’origen.Considereml’aplicació
R4
ψ : U × (a ,b ) → V (x1,x2,x3,t) → ϕt ( 3 i=1 xiei(t)), (14)
laqualdonaràllocaunacartalocal (ψ(U × (a ,b )),ψ 1)
Enelsistemadecoordenadescorresponentaaquestacarta,l’observador γ(t) técoordenades (0, 0, 0,t) peratot t;lessubvarietats St (quehemidentificatambl’«espai»del’observadoral’instant t)sónlesllesqueshoritzontals t = constant;lamatriude gγ(t) és diag[1, 1, 1, c2];lageodèsicaqueuneix qualsevolpunt p = (p1,p2,p3,t) ∈ St amb γ(t) = (0, 0, 0,t) estàdeterminada paramètricamentper s → ( sp1 p , sp2 p , sp3 p ,t),amb p = i(pi)2;i,finalment, ladistànciageodèsicaentre p ∈ St i γ(t) és p
4Acceleracióqueunobservadorencaigudalliureatribueix aunaltreobservadorencaigudalliure
Consideremaradosobservadors A i B pròximsl’undel’altreiencaiguda lliure.Siguin γA i γB lesduescorbesde V querepresentenlessevesvides. Alafigura1esdibuixenaquestescorbes,juntamentambelsespais(detres dimensions)delprimerobservador, St1 , St2 , St3 ,entresinstantsdelseutemps propi(consideratscomasubvarietatsde V pelprocedimentexplicatalasecció anterior).Observeuque St1 , St2 , St3 sónperpendicularsalacorba γA(t) del primerobservador,perònohosónalacorba γB (t) delsegon.Eneldibuix esposademanifestquel’observador A veuràque B vacanviantdeposició al’espai(al’espaidetresdimensionsde A)iliatribuiràunaacceleracióque ensproposemcalcularacontinuació.Remarquemabans,però,quecadaun d’aquestsdosobservadorsestàencaigudalliureicapd’ellsnonotaquesobre ellactuïcapforça.Tanmateix,veuremque A atribuiràa B unacertaacceleració.
Figura1
JoanGirbau
Fixemuninstantdetemps t = t0 del’observador A.Comquevolemestudiar laposiciórelativade B respectea A enelsinstantspropersa t0,persimplificarhofaremuncanvid’origeneneltempsdel’observador A demaneraque l’instantquehemfixatpassiaserl’origendetemps t = 0.Provaremellema següent:
Lema7. Existeixunnúmerorealpositiu ε talquesi B ésunobservadorencaiguda lliuretalquelageodèsica τ → γB (τ) talla S0 enunpuntadistànciageodèsica de γA(0) menorque ε,llavorsexisteixunavariació
α : ( ε,ε) × ( ε,ε) → V (s,τ) → α(s,τ),
quecompleix:
1) α(0,τ) = γA(τ).
2) Lescorbes τ → α(s,τ) sóngeodèsiquesdevectortangentdenorma ic en totpunt.
3)Perauncertvalor sB de s escompleix α(sB ,τ) = γB (τ).
4) s → α(s, 0) éslageodèsicade S0 quedónaladistànciamínimaa γA(0)
5) Elcamp ∂ ∂s delavariació α ésperpendiculara ∂ ∂τ sobrelacorba τ → α(0,τ) = γA(τ)
Aquestlemaensasseguraquetotobservador B encaigudalliurepròxim a A enuncertinstant t = 0deltempsde A formapartd’unafamília αs d’observadorsencaigudalliureparametritzadaperunparàmetre s ∈ ( ε,ε), delaqualformenpart A (pera s = 0)i B (pera s = sB ).
Deixaremlaprovadellemaperalfinald’aquestaseccióiara,utilitzant-lo, calculareml’acceleracióque A atribuiràa B al’instant t = 0delseutemps. Laposicióque A atribuiràa B al’instant t seràelpunt pt intersecciódela geodèsica τ → α(sB ,τ) amb St .Sigui ξt ∈ γA(t) ⊥ ⊂ TγA(t)(V) elvectortal que ϕt (ξt ) = pt .Elvectorposicióque A atribuiràa B al’instant t serà ξt .Per tant,l’acceleracióque A atribuiràa B al’instant t = 0serà ∇γA(0)∇γA(t)ξt
Enelsistemadecoordenades(14)adaptatal’observador A,tindrem
αλ(s,τ) ≈ αλ(0,τ) + ∂αλ(0,τ) ∂s s,λ = 1,..., 4, onelsímbol ≈ indicaigualtatllevatdetermesd’ordre > 1en s.Comqueel vector ∂ ∂s s=0 ésperpendiculara ˙ γA(τ) peraqualsevol τ,laquartacoordenada de ∂αλ(0,τ) ∂s serànul.la.Comque,d’altrabanda, α(0,τ) = γA(τ),tindrem
α(s,τ) ≈ ∂α1(0,τ) ∂s s, ∂α2(0,τ) ∂s s, ∂α3(0,τ) ∂s s,τ . (15)
Elpunt pt intersecciódelageodèsica τ → α(sB ,τ) amb St és pt ≈
∂α1(0,t) ∂s s, ∂α2(0,t) ∂s s, ∂α3(0,t) ∂s s,t
(aclarimaquíquehemdesignatper τ eltempspropidelsobservadors τ → α(s,τ) peratot s,iper t eltempsdel’observador A.Ésadir,que τ = t quan s = 0).Elvector ξt serà,doncs,aproximadamentiguala sB ∂ ∂s (0,t).Comquela
variació α éspergeodèsiques,elvector ∂ ∂s (0,t) ésuncampdeJacobisobrela geodèsica γA,ipelteorema3
∇γA(0)∇γA(t)ξt ≈ R(˙ γA(0),ξ0)˙ γA(0).
Resumimacontinuacióenelteoremasegüentlesconclusionsaquèhem arribat:
Teorema8. Sigui A unobservadorencaigudalliureisigui γA(t) lageodèsica querepresentalasevavida.Sigui B unaltreobservadorencaigudalliureque durantuncertperíodedetempsestàsuficientmentapropde A perquèaquest lipuguimesurarlasevaposició.Sigui ξt elvectorposicióque A atribueixa B (vectorquedepènde t).L’acceleracióque A atribuiràa B és R(γA,ξ)γA,on R indicaaquíeltensordecurvaturade (V,g)
Donemacontinuaciólaprovadellema.
Provadellema7. Consideremunacartalocaladaptadaal’observador A donadaperuna ψ delaforma (14) talque0 ∈ (a ,b ).Suposemquelacorba γB (τ) interceptalasubvarietat S0 d’equació t = 0enuncertpunt p.Fem uncanvid’origeneneltempspropi τ de B demaneraqueelpunt p corresponguia τ = 0.Enlescoordenadesdelacartalocalquehempres,la geodèsica a(s) de S0 queuneix p amb γA(0) serà a(s) = ( sp1 p , sp2 p , sp3 p , 0),amb p = i(pi)2.Elsespaistangents Ta(s)(V) enelsdiversospunts a(s) de lageodèsica a(s) estantotscontingutsenunavarietatcomuna,queéselfibrattangent T(V).Sigui s → b(s) ∈ T(V) unacorbadiferenciablede T(V) que compleixi:1) b(s) ∈ Ta(s)(V) peratot s;2) b(0) = ˙ γA(0);3) b( p ) = ˙ γB (0); 4)totsels b(s) sóntemporalsitenennorma ic,ésadir, ga(s)(b(s),b(s)) =−c2 Comqueels b(s) sóntemporalsipera s = 0elvector b(0) = γA(0) apuntacap alfutur,apuntarancapalfuturperatot s.Sigui τ → γs (τ) l’únicageodèsicatal que γs (0) = a(s) i γs (0) = b(s).Cadageodèsica τ → γs (τ) enprincipinomés estaràdefinidaenuncertinterval εs <τ<εs quedepènde s,peròelteorema d’existència,unicitatidependènciadiferenciabledelescondicionsinicialsde l’equaciódelesgeodèsiquesensasseguraqueexisteixun ε talque τ → γs (τ) estàdefinitperatot (s,τ) ∈ ( ε,ε) × ( ε,ε).Definimllavorslavariació α posant α(s,τ) = γs (τ).
Aquestavariació α,perconstrucció,ésunavariaciópergeodèsiquesde γA tal quepera s =|p| s’obté γB .Designemper sB aquestvalorde s (ésadir, sB =|p|). Elcamptransvers ∂ ∂s d’aquestavariacióésperpendicularperconstruccióa ∂ ∂τ per a s = 0i τ = 0.Provemqueaixòimplicaque ∂ ∂s ésperpendiculara ∂ ∂τ pera s = 0,
JoanGirbau
qualsevolquesigui τ.Enefecte,comque g( ∂ ∂τ , ∂ ∂τ ) = c2,lasevaderivada respectea s ésnul la.Pertant,
=
Osiguique ∇ ∂ ∂s ∂ ∂τ éssempreperpendiculara ∂ ∂τ . D’altrabanda,
Però ∇ ∂ ∂τ
∂s =∇ ∂ ∂s ∂ ∂τ perquèlesderivadesparcialscommuten,pertant,elprimer termedelsegonmembredelaigualtatanteriorésnulielsegonterme,també, perquè τ → α(s,τ) sóngeodèsiquesperatot s.Pertant,elproducteescalar de ∂ ∂s i ∂ ∂τ nodepènde τ.Comquepera s = 0i τ = 0s’anul.la,tambés’anul.larà pera s = 0iqualsevol τ ✷
5Equaciód’Einsteinperapetitespertorbacionsdelamètrica deMinkowski
Sortosamentnosaltresvivimenunaregióonelscampsgravitatorissónmolt petitsdesdelpuntdevistarelativista.Sinohihaguessincampsgravitatoris, lafísicaseriadescritaperlarelativitatespecial,quedesdelpuntdevista geomètricesmodelaal’espaideMinkowski (R4,η),on η designalamètricaque enlabasecanònicade R4 tépermatriulamatriudiagonal η = diag[1, 1, 1, c2] Estudiaremelcasd’uncampgravitatoricreatperunamatèriaambtensor d’impulsió-energia T petitiderivadesde T petites,isuposaremquelamètrica deLorentz g a R4 associadaalcampgravitatoriésunapertorbaciópetitadela mètricadeMinkowski.Ésadir, g = η + h,amb h petitiderivadesde h petites. L’equaciód’Einstein(13)s’escriurà:
Ric(g ) = χ T 1 2 (trg T)g .
Comque g = η + h,itenintencomptelafórmula (8) queensdónade maneraaproximadalamatriu (g αβ),tindrem (trg T)g = (g αβTαβ)g ≈ ≈ ((ηαβ hαβ)Tαβ)(η + h) ≈ (ηαβTαβ)η = (trη T)η, onhemsuprimit(perpetits)elstermesqueportenproductesde h i T oproducte dedues h.
Pertant,l’equaciód’Einsteins’escriudemaneraaproximada:
Ric(η + h) ≈ χ T 1 2 (trη T)η . (16)
Sigui D(h) el2-tensorcovarianta R4 donatper
D(h)αβ = 1 2
on ∇ indicaladerivadacovariantassociadaalamètricainicial(queenaquest casésladeMinkowski).
Envirtutdelafórmula(11)esté
Ric(η + h) ≈ Ric(η) + D(h).
ComqueeltensordeRiccide η ésnul,l’equació (16) s’escriudemanera aproximada
Aquestaequació,totiseraproximada,encaraésmassacomplicada.Pertal desimplificar-la,encomptesdeconsiderartoteslesmètriquesdeLorentzdela forma g = η + h amb h petit,enslimitaremnomésaaquellesmètriques g = η + h talsque h (amésdeserpetit)compleixlacondiciósuplementària
tr h, (18)
on d indicaladiferencialexterior.Aquestacondiciós’escriuencomponents:
Tenintencomptequelesderivadescovariantsassociadesalamètricade Minkowskisónlesderivadesordinàriesique ∇α commutaamb ∇β,esveu trivialmentqueperales h quecompleixenlacondició(18)homté
onl’operador ✷ ésl’operadorded’Alembertqueactuasobrelesfuncions f de R4 així:
Pertant,perales h quecompleixen(18),l’equació(17)s’escriu:
, (19) on S designaeltensor T (1/2)(trη T)η queapareixalsegonmembrede (17) Observeuqueenlesregionsde R4 oneltensor T s’anul.la(onnohihamatèria), també S s’anul laienaquestesregionsl’equaciód’Einsteins’escriudemanera aproximada: ✷hαβ = 0, queésl’equaciód’onaperacadaunadeles10components hαβ de h
JoanGirbau
Resumint:l’equaciód’Einsteinaproximadacorresponentaunamètrica g = η + h iauntensord’impulsió-energia T (amb T i h petits)és (17).Arabé,pera lesmètriques g queprovenend’un h quecompleix (18),l’equaciód’Einstein aproximadaespotescriuredelaformaméssenzilla (19).Cal,doncs,preguntarnosperlasignificaciófísicadelacondició (18).Perferaixòcalestudiarl’acció delsdifeomorfismespròximsalaidentitatsobrel’equació(17).
6Acciódedifeomorfismespròximsalaidentitat sobrelesmètriques
Lapràcticatotalitatdelsllibresclàssicsderelativitat,enarribaraaquestpunt, fanunscàlculssenzillsencoordenadesperexplicarquelacondició (18) és irrellevantdesdelpuntdevistafísic,càlculsqueamaguenunamicaqueaquest fetinvolucradifeomorfismesdelavarietatpròximsalaidentitatiderivadesde Lierespectealscampsqueparametritzenaquestsdifeomorfismes.Perposar demanifesttotaixòdemaneraclaraconvéconsiderarunmarcunamicamés generalqueeldel’apartatanterior.Situem-nosenelcontextd’unavarietatde Lorentz (V,g) peralaqualexisteixunamètricadeRiemann γ talquelavarietat deRiemann (V,γ) éscompleta.Enaquestasituació,podemparametritzarels difeomorfismesde V pròximsalaidentitatpelscampsvectorials ξ pròximsa zeroatravésdel’exponencialgeodèsicade γ,talcomexplicaremacontinuació. Donatuncampvectorial ξ,designemper fξ eldifeomorfisme
fξ : V → V x → z(x, 1,ξ),
on t → z(x,t,ξ) indical’únicageodèsicadelavarietatdeRiemann (V,γ) talque z(x, 0,ξ) = x i z(x, 0,ξ) = ξ.Sigui g = g + h unamètricadeLorentzpròxima a g.Posemper g ◦ fξ = (f 1 ξ )∗g .Designemper ∇ laderivadacovariant associadaalamètrica g iper ∇ laderivadacovariantassociadaa g.Sila mètrica g ésdelaforma g = g + h amb h petit,lamètrica g ◦ fξ quan ξ és petittambéseràpròximaa g i,pertant,seràdelaforma g ◦ fξ = g + hξ amb hξ petit.Laproposiciósegüentdescriularelacióentre hξ i h: Proposició9. Escompleix
hξ ≈ h Lξ g, ienqualsevolcartalocalaixòespotescriure
(hξ )αβ ≈ hαβ −∇αξβ −∇βξα
Prova. AplicantlafórmuladeTayloralacorba t → z(x,t,ξ),obtenim:
zα(x, 1,ξ) = zα(x, 0,ξ) + zα(x, 0,ξ)(1 0) +···
Aixòdóna f α ξ (x) = xα + ξα(x) + T α(ξ), (20)
on T(ξ) indicauntermed’ordre > 1en ξ. L’expressió(20)enspermetcalculareljacobià
Eljacobiàdeldifeomorfismeinversserà
Comque ((f 1 ξ )∗(g ))x
tenintencomptel’expressió (21) deljacobiàdeldifeomorfismeinvers,tindrem (g ◦ fξ )αβ(x) = gαβ(f 1 ξ (x))
on ∂α designa,comsempre, ∂/∂xα Arabé,perlafórmuladeTaylorresulta
Aixòs’escriucom
(x) ξ(g
) +··· , on ξ(gαβ) indicaelcamp ξ actuant(comaderivació)sobrelafunció gαβ. Substituintaquestaexpressióa(22)s’obté (g ◦ f
Arabé,elstermes (∂
podenescriurecom
JoanGirbau
Substituintaixòa (23) itenintencomptel’expressió (2) deladerivadadeLie, obtenim
Utilitzantlanotaciódelasubsecció1.2.3,tindrem
Arabé,elstermes Qαβξβ contenenproductesde h ide ξ (ambdóspetits).
Seran,pertant,negligiblesi(24)s’escriurà
Aixòprovalaproposició. ✷
7Elecciód’unareferènciaconvenientperal’equació degravitació
Tornem-nosasituarenelmarcdelasecció5.Estàvema R4 amblamètrica η de Minkowski.L’equaciód’Einsteinaproximadacorresponentaunamètrica g = η + h iauntensord’impulsió-energia T (amb T i h petits)era (17).Pera lesmètriques g queproveniend’un h quecomplia (18),l’equaciód’Einstein aproximadaespodiaescriuredelaformaméssenzilla (19).Enaquestasituació establiremelteoremasegüent:
Teorema10. Si h éssolucióde
llavors h éssoluciódel’equaciód’Einsteinaproximada (17).D’altrabanda,si h éssoluciódel’equaciód’Einsteinaproximada (17),llavorsespottrobarun difeomorfisme fξ pròximalaidentitat(difeomorfismeassociatauncamp ξ)tal quesiposem (f 1 ξ )∗(η + h) = η + hξ ,aleshores hξ siguisolucióde (25).
Ditdemaneramenysprecisa:lesequacionsaproximades (25) sónequivalents al’equacióaproximadad’Einstein (17).
Delfetd’escollirundifeomorfismeadequatperquèescompleixilasegona equacióaproximadade (25) elsfísicsendiuenescolliruna gauge.Nosaltres traduiremelmotanglès gauge (empratarreu)per referència.
Prova. Laprimeraimplicaciójal’hemdemostratalasecció5.Perdemostrar lasegonavegemenprimerllocquel’equació (17) ésinvariantperl’accióde difeomorfismesinfinitesimals.Ésadir,quans’aplicaundifeomorfismeinfinitesimalaaquellaequaciós’obté exactament lamateixaequació.Comencempel primermembrede (17).Vegem,amblanotaciódel’apartatanterior,quesi ξ és uncampvectorialesté D(h)=D(hξ ).Enefecte,deladefinicióde D(h) homté
Substituintaquí hξ perl’expressió (h
α donadaper laproposició9,s’obtéperuncàlculsenzillque D(hξ )=D(h).
Naturalment,sielprimermembrede (17) ésinvariantperl’acciód’un difeomorfismeinfinitesimal,elsegonmembre,també.Detotesmaneresaixòes potveuredirectamentdelamaneraqueexplicaremtotseguit.
Recordemquehavíemdesignatper S = T (1/2)(trη T)η.Elsmateixos càlculsquehemfetperestablirlafórmula(24)ensportarienal’expressió (S ◦ fξ ) = S Lξ S +···
Envirtutde(2),tindrem
Encadaund’aqueststermes,hiintervenenproductesde ξ ide S,ambdós petits.Pertant, Lξ S ≈ 0i (S ◦ fξ ) ≈ S.
Elsegonpasquefaremésveureque,donadaunamètrica g = η + h pròxima a η,podemtrobaruncampvectorial ξ peralquallamètrica g ◦ fξ = η + hξ compleixilacondició(18),ques’escriu
Comque (hξ )
,elprimermembrede(26)esdevé
Peraltrabanda,tr hξ = tr h 2div ξ.Pertant(26)s’escriu,finalment
Això,pera h donat,ésunaequacióen ξ quetéinfinitessolucionsdepenent delescondicionsinicialsques’imposina ξ.Qualsevold’aquestessolucionsens dónaundifeomorfismeinfinitesimalcomelquebusquem.
Prenguemara h quesiguisoluciódel’equaciód’Einsteinaproximada (17).Pel procedimentqueacabemd’indicartrobemuncamp ξ talqueel hξ corresponent compleixilasegonaequacióaproximadade (25).Comquel’equació (17) és invariantperl’acciódedifeomorfismesinfinitesimalsi h erasolucióde (17), hξ tambéhoserà.Pertant, hξ seràsoluciódelaprimeraequacióde(25). ✷
JoanGirbau
Mésendavantnecessitaremellematècnicsegüentrelacionatambl’afirmació delasegonapartdelteoremaanterior.
Lema11. Si h éssoluciódel’equaciód’Einsteinaproximada (17),si ξ ésuncamp vectorialtalque hξ éssolucióde (25) isi ζ ésqualsevolcampquecompleix ✷ζα = 0,llavorselcamp ξ = ξ + ζ éstalque hξ tambééssolucióde (25)
Prova. Alademostraciódelasegonapartdelteorema10havíemprescoma camp ξ qualsevolcampquefossolucióde (27).Naturalment,si ξ éssolució de(27)i ζ compleix ✷ζα = 0,elcamp ξ = ξ + ζ tambééssolucióde(27). ✷
Einsteinvadonarsolucionsexplícitesdelesequacions (25) enelsarticles[8] i[9].Perveurecomespodenresoldre,diguemqueésbenconegutqueen mecànicaclàssicaelpotencialgravitatori(a R3)produïtperunamatèriaamb densitat ρ(x) vedonatper
V(x) =−G R3 ρ(y) |x y| dy, iqueaixòcorresponalasoluciódel’equaciódePoisson
∆V = 4πGρ
ques’anul.laal’infinit.
Demaneraanàloga,espotdemostrarquea R4 lasolucióde
✷V = 4πGρ queperacada t s’anul.laal’infinitde R3 ×{t} éselpotencial
V(x,t) =−G R3
ρ(y,t ± 1 c |x y|) |x y| dy.
Pertant,les hαβ solucionsde(25)quebusquemsón hαβ(x,t) = χ 2π R3 Sαβ(y,t 1 c |x y|) |x y| dy. (28)
Arabé,calpreguntar-nossiaquestes hαβ compleixentambélasegona equacióde (25).Veuremquesí.Enefecte,sabemqueeltensor T d’impulsióenergiatédivergèncianul.la.Aixòportacomaconseqüènciaqueeltensor S = T (1/2)(trη T)η compleixlacondició
∇ρ Sρα = 1 2 ∇α tr S.
Utilitzantaquestacondicióespotveurequelessolucions hαβ donades per(28)compleixenautomàticamentlasegonaequacióde(25).
8Quèentenemper onagravitatòria
Jahemditalcomençamentdelasecció5quesortosamentnosaltresvivim enunaregióonelscampsgravitatorissónmoltpetitsdesdelpuntdevista relativistaiquelafísicadelnostreentornésmodeladaperpertorbacions petitesdelamètricadeMinkowski η + h;isielnostreentornéselbuit,ara iaquíeltensor h,llevatd’uncertdifeomorfismede R4,compliràl’equació d’ona ✷hαβ = 0.Estaríem,doncs,temptatsdedirqueunaonagravitatòriaés unapertorbaciópetitadelamètricadeMinkowski η demaneraqueespot trobaruncertdifeomorfismede R4 talqueaquestapertorbaciós’expressa com η + h,ambeltensor h quecompleixl’equaciód’ona ✷hαβ = 0.Arabé,si lescomponents hαβ nodepenguessindeltemps,lapertorbaciócorresponentde lamètricadeMinkowskipodriaconsiderar-seunaonagravitatòria?Evidentment queno,perquèlaideaintuïtivaquetenimd’onaestàassociadaaalgunacosa quevariaambeltemps.
Siles hαβ nodepenendeltemps,l’equaciód’ona ✷hαβ = 0esdevél’equació deLaplace
perquè ∂2hαβ/∂t2 = 0.Aquestéselcasdelcampgravitatoriproduïtperqualsevolestrellaesfèrica(enparticular,pelSol),campestàticquenodónalloca caponagravitacional.Vegemambdetallcomsónles hαβ enaquestasituació. Ésbenconegutquelamètricade R4 associadaalcampgravitatorid’una estrellaesfèricaésladeSchwarzchild, g =
1 1 k r
amb k = 2Gm/c2,on m éslamassadel’estrellai G éslaconstantdegravitació deNewton(r , ϕ i θ sóncoordenadesesfèriquesde R3,amb ϕ designant lacolatitudi θ lalongitud).Quan m = 0,l’expressióanteriorcoincideixambla mètricadeMinkowski.Sigui h = g η.Lesúniquescomponentsnonul.lesde h sónlessegüents: hrr = k k r i htt = c2k r .Sienscenyimalateorialinealitzadai nopasaladelessolucionsexactes,tenim hrr = k k r = k/r k/r 1 =− k r 1 1 k/r ≈− k r 1 + k r ≈− k r ,htt = c2k r .
Espotveurequel’operadorded’Alembert ✷ enlescoordenades (r,ϕ,θ,t) s’expressa
Lesnostres hαβ nonul.lesnomésdepenende r isón,llevatd’unaconstant multiplicativa,elpotencialclàssic1/r .Compleixen ✷hαβ = ∆hαβ = 0.
JoanGirbau
9Onesgravitacionalsmonocromàtiques,planes
Lesonesqueensarribenprocedentsd’algunaestrellallunyanapodemconsiderarquesónonesplanes.Pertant,tenintpresentl’exempledelasubsecció1.1, estudiaremonesdelaforma
on Aαβ sónconstantsrealsqueformenunamatriusimètricai Re() designala partrealdelquehihaentreparèntesis.D’araendavant,percomoditat,ometrem l’escripturade Re() ilasobreentendrem.Lesones h delaforma (29) nosón pastoteslesquecompleixenl’equaciód’Einsteinaproximada(enelbuit),però síquequalsevolsoluciónoestàticad’aquestaequaciópotserexpressadaper superposiciódeFourierd’onesdelaforma(29).
Enl’expressió (29) s’utilitzenlescoordenades (x1,x2,x3,t) del’espaide Minkowski,enlesqualslamètricas’expressacom diag[1, 1, 1, c2].Posem x4 = ct iusemlescoordenades (x1,x2,x3,x4) enlesqualslamètricatél’expressió diag[1, 1, 1, 1].Comque t = x4/c,siposem k4 =−ω/c,l’ona (29) s’expressaràper hαβ = Aαβ ekν xν , (30) onhemomèsRe() perquèhosobreentenem.
Nocaldirqueal’espaideMinkowskiidentifiquem1-formesivectorsa travésdelamètricaique k pensadacom1-formatécomponents (kν ) amb k4 =−ω/c,mentrequelamateixa k pensadacomavectortécomponents (kν ) amb k4 = ω/c.
Ésimmediatveurequelacondicióqueles hαβ de (30) compleixin ✷hαβ = 0 equivalalfetque k compleixi kλ λ = 0(osigui, η(k,k) = 0,pensant k coma vector).Tambéésimmediatveurequelacondició div h = 1 2 d tr h equivalal fetquelamatriu A = (Aαβ) compleixi Aµβkµ = 1 2 (tr A)kβ.Pertant,s’hauràde complir
kλkλ
(31)
Analitzemlaprimerad’aquestesduescondicions.Recordemquealasubsecció1.1definíemelvectord’onacomelvector k de R3 donatper k = (ω/v)n,on n eraelvectorunitarienladirecciódepropagaciódel’ona.D’aquíesdesprèn quelanormade k compleix |k|= ω/v.Enaquestaseccióhemafegit,però,una quartacomponenta k il’hemconsideratcomunvectordel’espaideMinkowski. Recordemque k4 = ω/c i k4 =−ω/c.Així,doncs,tindrem kλkλ = kiki + k4k4 (l’índex i variad’1a3).Pertant, kλkλ = (ω/v)2 (ω/c)2.Veiem,doncs,quela condició kλkλ = 0equivaladirquelavelocitatdepropagació v del’onasigui igualaladelallum c
10Polaritzacionsdelesonesgravitatòriesplanes
Delesduescondicionsde (31),laprimeraescompleixsemprequelavelocitat depropagaciódel’ona (30) siguiladelallum.Lasegonaigualtatde (31) ens
dónaquatrecondicions(unaperacada β)querelacionenelselementsdela matriu A.Comquelamatriu A éssimètrica,enelcasgenèrictindrà10elements diferents.Siaquests10elementsestanrelacionatsper4equacions(segona condicióde (31)),enquedaran6d’independents.Ésadir,enelcasgenèric,la matriu A tindrà6elementsindependentsielsaltresserandeterminatsper (31). Veuremacontinuació,però,quepodemtrobarundifeomorfismeinfinitesimal ζ convenientde R4 talquela hζ corresponentsiguidelaforma
ζ )αβ = Bαβekν xν (32)
demaneraquelamatriu B compleixilesmateixescondicionsquecomplia A, peròtinguinomés2elementsindependentsencomptesde6.Ambaquest propòsitconsideremuncampvectorial ζ de R4 delaforma
), (33)
ambels P α númeroscomplexosadeterminar.Comsempre,d’araendavant ometrem Re() enelscàlculs.Envirtutdelaproposició9,la hζ relativaa aquestcamp ζ estaràrelacionadaambla h queteníempermitjàde
(hζ )αβ = hαβ −∇αζβ −∇βζα
Substituintaquíles (hζ )αβ,les hαβ iles ζα pelsseusvalorsdonatsa (32), (30) i(33)ioperant,s’obté:
αβ = Aαβ ikαPβ ikβPα. (34)
Aquestafórmularelacionalesmatrius A = (Aαβ) i B = (Bαβ),iapartird’ellaes veufàcilmentquesilamatriu A complia (31),lamatriu B compleixautomàticamentlesmateixesrelacions,ésadir, Bµβkµ = 1 2 (tr B)kβ,independentmentdels valorsqueprenguinles Pα queencaranohemfixat.
Fixatunvectortemporal u del’espaideMinkowski,podemescollirelsvalors delesquatre Pα demaneraqueescompleixinlesquatrerelacions Bαβuβ = 0. Aixòesfaimposant
(Aαβ ikαPβ ikβPα)uβ = 0.
Esdeterminenlesquatre Pα enfunciódeles Aαβ apartirdelesquatreequacions anteriors.Enresum,lamatriu B quefinalmentobtindremcompliràd’unabanda lesquatrerelacions Bµβkµ = 1 2 (tr B)kβ ilesquatrerelacions Bαβuβ = 0.Com quelanormadelvectortemporal u escollitnoinflueixenlacondició Bαβuβ = 0 quehemimposat,suposaremque u ténorma ic.Si,perfixarlesidees,escollim unabasedel’espaideMinkowskiquetingui u comaquartelement, u = (0, 0, 0, 1),lacondició Bαβuβ = 0s’escriu Bα4 = 0.
Enresum,lamatriu B quefinalmentobtinguemapartirde (34) complirà d’unabandalesquatrerelacions Bµβkµ = 1 2 (tr B)kβ idel’altra,lesquatre relacions Bα4 = 0quehemimposat.Entotal,8relacionspera10deles componentsde B.Pertant,nomésn’hihaurà2d’independents.
JoanGirbau
Amés,aquestamatriu B tindràtraçanul la.Enefecte,fent β = 4ales relacions Bµβkµ = 1 2 (tr B)kβ,comqueels Bµ4 sónnuls,ensqueda (tr B)k4 = 0 i,comque k4 ≠ 0,latraçade B s’had’anul.lar.
Suposemqueprenemelstreseixosde R3 demaneraquel’onagravitatòria (32) queensarribasegueixladirecciódel’eixdeles z negatives(ensarriben dedaltdelcel!).Aleshoreselvectord’onade R3 serà k = (0, 0, ω/c) ilescomponents kα delvectord’onadel’espaideMinkowskiseran (0, 0, ω/c,ω/c).
Així,larelació Bµ1kµ = 0ensdóna B31 = 0,larelació Bµ2kµ = 0ensdóna B32 = 0 ilarelació Bµ3kµ = 0ensdóna B33 = 0.Comquelatraçahadesernul.la,la matriu B adoptalaformasegüent:
(35)
Consideremlesduesmatriussegüents:
Òbviament,lamatriu B s’expressacomacombinaciólineald’aquestesdues. Pertant,totaonagravitatòriaplanadelaforma (32) queensarribaanosaltres enladirecciódeles z negativeséscombinaciólinealde h+ = A+ cos(ω( z c + t)) ide h× = A× cos(ω( z c + t)),ques’anomenen onesgravitatòriespolaritzades. Comquel’origendetempsésarbitrari,canviant t per t + t0 a ω( z c + t) ens quedadelaforma ω( z c + t) + ζ,on ζ indicalafase.Pertant,l’expressiómés generalseria h+ = A+ cos(ω( z c + t) + ζ) , h× = A× cos(ω( z c + t) + ζ). Observeuque,comquelatercerafiladelesmatriusanteriorsésnul.la,les onesnotenencomponenten z isón,pertant,transversesaladireccióde propagació.Aclarimqueelssímbols + i × de h+ i h× notenencaprelacióamb capsumaniproducte,sinóqueindiquen«encreu»i«enaspa»,denominació quequedaràjustificadamésendavant.La gauge determinadademaneraque l’onaqueensarribaenladirecciódel’eixdeles z tinguilaforma (35) repel nomanglèsde TransverseTracelessLorentzgauge,abreujadament, TT-gauge,i nosaltresendirem referènciaTT.
11Efectesd’unaonagravitatòriasobrepartículeslliures
Suposemunapartículaenunaregiólliuredecampsgravitatoris.Lasevavida seràdescritaperunarectadel’espaideMinkowskidevectordirectortemporal u.Quanarribaunaonaenladirecciódel’eixdeles z,onaformadaper lasuperposiciód’onesmonocromàtiquesdelaforma (29),elegimlareferènciaTTdemaneraqueelvector u queensserviaperfixarlesquatre Pα sigui
elvector u delavidad’aquestapartícula,ielegimllavorslabasedel’espai deMinkowskidemaneraque u siguielquartelementdelabase.Lavidade lespartículeslliuresseràdescritapergeodèsiques γ(τ) lescomponentsdeles qualscompliranlesequacionsdelesgeodèsiques
VeuremaraqueenlareferènciaTTelssímbolsdeChristoffel Γ λ 44 sónnuls. Enefecte,
Però,envirtutdelaforma (35) delesamplitudsdeles hαβ,totesles hα4 són nul les.Aleshores,de(37)sesegueixque Γ λ 44 = 0.
Lavidadelapartículaqueconsiderem,abansquel’onahiarribés,erarepresentadaperunarectavertical γ(τ) = (x0,y0,z0,τ) del’espaideMinkowski, amb x0, y0, z0 constants.Quanarribal’ona,lamètricadel’espaicanviaipassa aser η + h.PeròcomqueelssímbolsdeChristoffel Γ λ 44 delanovamètrica s’anul len,lamateixacorba γ(τ) = (x0,y0,z0,τ) compleixlesequacions (36) i ésunageodèsicadelanovamètrica.Pertant,segueixencaigudalliureinonota capacceleració.Aixònoésgensestranyjaquequalsevolpartículaencaiguda lliuresegueixencaigudalliurequancanviaelcampgravitatori.Elqueaquí potsorprendreéselfetqueladescripcióencoordenadesdelavida γ(τ) dela partículasiguiexactamentlamateixa.
Comquelamètricahacanviatenarribarl’ona,l’únicamaneraquetéun observadorintel ligentqueviatgiamblapartículad’adonar-sedelapresència del’onaésmesurantlaposiciódepartículespròximes.L’observadoratribuirà alespartículespròximesunaacceleraciódonadapelteorema8delasecció4.
Segonsaquestteorema,l’acceleracióquel’observadoratribuiràaunapartícula pròximadevectorposició ξ serà R(γ,ξ)γ.Designemper ai lestrescomponents d’aquestvectoracceleració.Tindrem ai = ξj
Peraplicaraquestafórmulaenscalcalcularlescomponentsdeltensorde curvaturadelamètrica η + h enlareferènciaTT.Lafórmula (10) aplicadaala mètrica η + h ensdóna
4hλµ ). (39)
Lescomponentsdederivadescovariantsqueapareixenenaquestafórmula (perexemple, ∇4h4λ)s’expressencomaderivadesordinàries(∂4h4λ)méstermes onapareixenproductesdesímbolsdeChristoffelper hλµ .Comqueelssímbols deChristoffels’expressenenfunciódeles hλµ ,aqueststermescontindran
JoanGirbau
dues hλµ ienelcontextdel’aproximaciólinealquefemsónnegligibles.Per tant,lesderivadescovariantsqueapareixena (39) podemconsiderarquesón derivadesordinàries.D’altrabanda,enlareferènciaTTtotesles h4λ sónnul.les.
Pertant,ensqueda
Tenintencompteque ξ éselvectorposiciódelapartícularespecteal’observador iquel’acceleraciódelapartícularespecteal’observadorés d2ξ dt2 ,lafórmula (38) ensquedarà(recordemqueelsíndexsgrecsvariend’1a4ielsllatinsd’1a3):
Totique ξ variaambeltemps,podemsubstituirambtotatranquil.litatel vector ξ queapareixalsegonmembredel’equacióanteriorpelvalor ξ0 que prenal’instant t = 0perquètotselsvalorsde ξ sónmoltpropersa ξ0.Ens queda,doncs,
(40)
Aplicaremaraaquestafórmulaperveurecomsónlesacceleracionsdeles partículessegonslaposicióqueocupenrespecteal’observador.Recordem queenlareferènciaTTqueusemsesuposaquel’onaavançaenladirecció deles z negatives(vededalt).Suposemquel’observadorestrobaal’origeni queobservaunapartículainicialmentsituadaalpunt ξ0 = (ε cos θ,ε sin θ, 0). Persimplificar-ho,suposemquel’onaquepassa(monocromàtica)tépolarització + (qualsevolonaéssumad’unaonaambpolarització + iunaaltra ambpolarització ×).Sigui H l’amplitudd’aquestaona.Comhemvistala secció10,lescomponents hαβ nonul.lesd’aquestaona(enelpla z = 0)són h11 = H cos(ωt +ζ), h22 =−H cos(ωt +ζ).Prengueml’origendetempsdemaneraquelafase ζ del’onasigui π/2,amblaqualcosa h11 = H sin ωt =−h22. Tindrem ∂2h11 ∂t2 =−Hω2 sin ωt i ∂2h22 ∂t2 = Hω2 sin ωt.D’acordamb (40),elvector acceleracióserà a = εω2H sin ωt 2 (cos θ, sin θ, 0).
Elsvalorsd’aquestaacceleraciócorresponentsa θ = 0i θ = π (duespartícules inicialmentenposicionsoposadessobrel’eixdeles x)són
a[0] = εω2H sin ωt 2 (1, 0, 0),a[π] = εω2H sin ωt 2 ( 1, 0, 0).
Constatemquesobreellesactuenforcesoposades.Ielsvalorscorresponentsa θ = π/2i θ =−π/2(partículesinicialmentenposicionsoposadessobrel’eix deles y)són
a[π/2] = εω2H sin ωt 2 (0, 1, 0),a[ π/2] = εω2H sin ωt 2 (0, 1, 0).
Sobreellestambéactuenforcesoposades,peròambsentitdiferentdelesde l’eixdeles x (vegeulafigura2).
Siencomptesdetreballarambunaonadepolarització + hohaguéssimfet ambunadepolarització × hauríemarribataconclusionssimilarssobreles partículessituadesenposicionsoposadessobrelesrectes y = x i y =−x.
Finsarahemcalculatl’acceleracióquel’observadormesuraràd’unapartícula situadainicialmentenlaposició ξ0 = (ε cos θ,ε sin θ, 0).Preocupem-nosara, nodel’acceleració,sinódelaposicióquel’observadormesuraràalllargdel temps.Laintegralgeneralde(40)és ξ1 =− εH 2 cos θ sin ωt + k1t + C 1 , ξ2 = εH
amb k1 , k2 , C 1 , C 2 constantsd’integració.Lesconstants k1 i k2 haurandesernullesperexclouremovimentsuniformesdelapartícularespectedel’observador, ilesconstants C 1 , C 2 s’hand’escollirdemaneraque,pera t = 0,laposicióde lapartículasigui ξ0.Ensqueda,finalment,
0 (41)
Comhemfetabansambl’acceleració,explicitemaquestvectorposició ξ per aduespartículessituadesinicialmentsobrel’eixdeles x enposicionsoposades (corresponentsa θ = 0i θ = π )iperapartículesenposicionsoposadessobre l’eixdeles y (corresponentsa θ = π/2i θ =−π/2).Tindrem:
ξ[0] = ε εH 2 sin ωt, 0, 0 ,ξ[π] = ε + εH 2 sin ωt, 0, 0 ,
ξ[π/2] = 0,ε + εH 2 sin ωt, 0 ,ξ[ π/2] = 0, ε εH 2 sin ωt, 0 . (42)
Compassavaamblesacceleracions,veiemaquítambéquelesvibracions delesduespartículessobrel’eixdeles x idelesduessobrel’eixdeles y són oposades.Quanlesprimeress’allunyen,lessegoness’apropeniviceversa.Com
Figura2
JoanGirbau
hemditabans,també,siencomptesdetreballarambunaonadepolarització + hohaguéssimfetambunadepolarització × hauríemarribataconclusions similarssobrelespartículessituadesenposicionsoposadessobrelesrectes y = x i y =−x.
12Aparellsperdetectaronesgravitacionals
Sibéalllargdelscentanysd’històriadelarelativitatgenerals’hanideatdiversos aparellsperdetectaronesgravitatòries,elsques’hanimposatúltimamentsón elsbasatsenlamesuraperinterferometriadelscanvisoscil.latorisproduïts enladistànciaentrepartículessituadesendireccionsperpendiculars,donats per(42).
Abansdedescriureelseufuncionamentrecordemquevivimenunaregió onelscampsgravitatorispròximsnoprodueixenonesgravitacionals.Enefecte, hemditalasecció8queelscampsgravitatorisestàtics(quenodepenendel temps)noprodueixenones.Pertant,elcampdelaTerra(elméspròxim), considerataïlladament,noprodueixones.ElcampglobaldelSistemaSolar síqueprodueixonesenvirtutdelmovimentdelsplanetes,peròsónd’una intensitatmoltpetitaid’unafreqüènciatambémoltpetita.Quanmésendavant comenteml’onacaptadapelsdetectorsdeLIGOel14desetembrede2015, analitzaremunsenyaldemigsegondedurada.Comquelavariaciódela posiciódelsdiferentsplanetesdelSistemaSolarenmigsegonéspràcticament negligible,lesonesgravitacionalsproduïdesperaquestavariaciótambéhosón.
Ditaixò,passemadescriureelfuncionamentdelsdetectorsd’onesbasats enlainterferometria.L’esquemad’aquestsdetectorsestàil.lustratenlafigura3. Suposemqueensarribaunaonadepolarització +.Suposemqueeldetectorestà orientatdemaneraqueelseixos x, y del’esquemadelafigura3corresponguin alseixos x, y delareferènciaTTadaptadaal’ona(segonsaquestareferència l’onaespropagaenladirecciódel’eixdeles z).Fementraral’aparellper A unraiglàserdellummonocromàticadelongitudd’ona λ (enprincipiaquesta longitudd’ona λ potserarbitràriainotéresaveureambl’onagravitatòria).
Aquestraigincideixenunprismaqueactuacomaseparadordelraig.Una meitatdelraigésreflectidapelprisma(queactuacomamirall)ienviadaal mirall M1 il’altrameitatdelraigtravessaelprismaivacapalmirall M2.Cada undelsdosraigsquehansortitdelprismaseparadorésreflectitpelmirall corresponent(per M1 oper M2)itornaalprismaseparador.Allàelsdosraigs sónenviatsaunfotodetector B
Abansdepassarl’ona,ladistànciaentreelprismaseparador(quesuposarem situatal’origendecoordenadesdelareferènciaTTquehempres)icadaundels miralls M1 i M2 és L (lamateixadistància).Peròaquestesdistànciesoscil lenquan passal’ona,isegons (42),quanl’unacreixen ∆L l’altradecreixenlamateixa quantitat,demaneraquequanelsdosraigsquehanseguitcaminsdiferents tornenaretrobar-seenelprismaseparador,arribenambfasesdiferentsiaixò éselquedetectaelfotodetector B
Enladeducciódelesfórmules (41) i (42) hemsuposatquetantl’observador comlapartículadelaqualaquestmesuralaposicióestanen caigudalliure Pertant,eneldissenydel’aparellanterior,tantelprismaseparadorcomels miralls M1 i M2 hauriend’estarencaigudalliure.Comqueaixòésimpossiblede realitzarenunaparellterrestre,pensemperunmomentquèpassariasielprisma separadorielsmiralls M1 i M2 estiguessinpenjatsd’unfil(encomptesd’estar encaigudalliure).Recordemquehemsuposat,demoment,queelseixos x, y del’esquemadelafigura3corresponenalseixos x, y delareferènciaTT adaptadaal’ona,laqualespropagaenladirecciódel’eixdeles z.Pertant,les variacionsenladistànciaentreelseparadorielsmirallsnomésesprodueixen enelpladeles x, y,inoenladireccióverticaldel’eixdeles z.Aixídoncs,siels mirallsielseparadorestiguessinpenjatsd’unfil(encomptesd’estarencaiguda lliure),comqueelfilnomésanul.laelmovimentd’aquestsmirallsenladirecció del’eixdeles z,ladistànciaentreellsenpassarl’onaserialamateixaquesi estiguessinencaigudalliure.Naturalment,aixòqueelsmirallsielseparador estiguin«penjatsd’unfil»ésunamanerasimplificadadedir convenientment lliures,senseestarsubjectesaterradeformasòlida.
Totaixòquehemditfareferènciaaunasituacióenquèl’onatépolarització + ique,amés,l’aparellésorientatdetalmaneraqueelseixos x, y d’aquest coincideixinambelseixos x, y delareferènciaTTdel’ona(laqualviatjaen ladirecciódel’eixdeles z).Peròl’aparellésunaconstrucciómoltsofisticada ambelsdosbraçosqueuneixenelseparadorcentralambelsmiralls M1 i M2 d’unalongitudmoltgran(enelLIGOsónde4km)inopodempasorientar l’aparellperadaptar-loacadaonaparticularqueenspuguiarribar.Enaquestescircumstàncies,mesuraràalgunacosaundetectorcomelqueacabemde descriure?
Perveure-ho,continuemsuposantdemomentquel’onaviatjaenladirecció del’eixdeles z,peròsuposemqueelsbraçosdel’aparellalfinaldelsquals estrobenelsmiralls M1 i M2 formenunangle θ ambelseixos x i y dela referènciaTTdel’ona,talcomindicalafigura4.Lafórmula (41) ensdonarà laposiciódelmirall M2 alllargdeltemps(lafórmulas’had’aplicaramb ε = L,
Figura3
JoanGirbau
distànciaabansdelpasdel’onaentre M2 ielprismaseparador).Així,doncs,la posicióde M2 enelpladeles x iles y serà:
M2 = L cos θ 1 H 2 sin ωt , sin θ 1 + H 2 sin ωt M1 y M2
x
Ladistànciade M2 alprismaseparadorsituatal’origenéslanormadel vectoranterior,ésadir,
L 1 H cos2θ sin ωt + H2 2 sin2 ωt.
Tenintencompteque √1 + x = 1 + x 2 +··· ,aquestadistànciaqueda(tenint encompteque H ésmoltpetitiespodennegligirelstermesen H2):
L 1 H cos2θ 2 sin ωt
Pertant,l’incrementdelongitudd’aquestbraç, ∆L (diferènciaentrel’expressióanteriori L),serà L(H/2) cos 2θ sin ωt.Sifemelmateixcàlculperal braçquecontéelmirall M1,obtindremquel’increment ∆L d’aquestbraçés L(H/2) cos2θ sin ωt
Fixem-nosquequanl’angle θ ésde45graus,elsincrementsdelsdosbraços sónnulsil’aparellnodetectares.Totaixò,suposantquelapolaritzaciódel’ona és +.Jahemditquelesonesambpolarització × escomportenanàlogament peròambungirde45graus.Pertant,quanl’angleentreelbraçdel’aparellque conté M2 il’eixdeles x delareferènciaTTdel’onaésde45graus,l’aparell nodetectalesonesambpolarització +,peròsíquedetecta(iambamplitud màxima!)lesdepolarització ×.Comquenormalmentlesonesquearribentenen componentsenlesduespolaritzacions,l’aparellsempreéscapaçdedetectar l’ona.
Figura4
Totsaquestscàlculsiraonamentselshemfet,però,suposantquel’onaens arribaverticalment,enladirecciódel’eixdeles z.Sinoésaixí,lesamplituds quedaranafectadespelcosinusdel’angleentreladirecciódepropagacióila vertical.Pertant,comméss’apartiladirecciódel’onadelaverticalmésfeble seràelsenyalcaptat.
13L’esdevenimentastronòmicGW150914
Jahemditalaintroduccióqueel14desetembrede2015,ales9:50:45de tempsuniversal,elsdosdetectorsbessonsdeLIGOvancaptarunsenyald’unes duesdècimesdesegondedurada,quedesprésd’unaanàlisiacuradas’ha atribuïtalesonesgravitatòriesproduïdesperlafusiódedosforatsnegres situatsauns410Mpcdedistància,ésadir,auns1340milionsd’anysllum. AquellesdevenimentastronòmicharebutelnomcientíficdeGW150914i novaseranunciatpúblicamentfinsal14defebrerde2016,dataenquèva aparèixerpublicatalarevista PhysicalReviewLetters unarticle[3],signatper 1023investigadorsdeLIGOideVIRGO,queoferiainformaciócientíficadela descoberta.Paral.lelamentaltresarticlesvanserpenjatsaInternet,entreels quals[1]i[2].Tambéhemditalaintroduccióqueactualmenthihaalmón diversosdetectorsd’onesgravitatòries,elsméssensiblesdelsqualssónelsdos bessonsdeLIGO,unaLivingston(Louisiana)il’altreaHanford(Washington), iVIRGO,aItàlia,peròjustamenteldiadeladetecciódelsenyalGW150914 l’aparelldeVIRGOestavaforadeserveipertreballsdeposadaaldia,demanera quenomésvapodersercaptatpelsdetectorsdeLIGO.
Elsenyalenqüestióestàrepresentatenlesgràfiquesdelafigura5.Les unitatsmarcadesal’eixd’abscissescorresponena0 30,0 35,0 40i0 45segons,
Figura5
ilesunitatsmarcadesal’eixd’ordenadescorresponenal’amplituddel’ona; d’ellesenparlaremdesprésmésextensament.Lesduesgràfiquesdedalt(dela figura5)sónpròpiamentelssenyalscaptatspelsdosobservatoris,mentreque lesduesgràfiquesdebaixcorresponenasimulacionsteòriques.
Enaquestarticlehemexplicatbastantdetalladamentlanaturalesadelesones gravitatòriesqueensarribenanosaltres(quevivimenunaregiódel’Univers lliuredecampsgravitacionalsintensos),perònohemtractatenabsolutla maneracomlesonessónproduïdesenregionsllunyanes.Iaixòésfonamental persaberquintipusdesenyalsesperemdetectar.Untipusd’onamoltestudiat desdelpuntdevistateòricéselproduïtperparellsd’estrellesquegiren l’unaentorndel’altraagransvelocitats.Aquestssistemespodenromandre estacionarisduranttempsipodenacabarambuncol.lapseifusiódelesdues estrelles.Lesduesestrellesqueorbitenl’unaentorndel’altrapodenserforats negresquanlesdensitatsdemassasónmoltgrans.Justamentenlesdues gràfiquesdebaixdelafigura5esmostrenlessimulacionsteòriquesquemés s’adiuenamblesgràfiquesrealsobservades,iaquestessimulacionscorresponen alafusiódedosforatsnegres.Lafreqüènciadelsenyalésjustamentlaque indicalamassadelesestrellesqueesfusionenil’amplituddelsenyalésla queenspermetestimarladistàncianostraalesestrelles.
Observeuqueenelsarticlescientíficssobreaquestesdeveniments’ofereixen dadesbastantprecisessobrelamassaestimadadelsdosforatsnegresque col lideixenisobrelasevadistànciaanosaltres,peròesparlademaneramolt imprecisadelasevalocalització.Noespotconcretardecapmaneraaquina galàxiacorresponen.Aixòésdegutalfetqueelsdetectorsnopodenprecisar ladirecciódelsraigsquereben.Hemvistalasecció12quel’amplituddel senyalésafectadapelcosinusdel’angleentreladirecciódepropagaciódel’ona ilavertical.SiunaonaésdetectadaendiversosllocsdelaTerra,coneixent elstempsd’arribadadelsenyalalsdiferentsindretsilesamplitudsd’aquests senyalsespodriadeterminarladirecciódepropagació.Peròcomquel’onadela qualparlemnomésvaserdetectadaperdosobservatorisseparatsper3030km, aixòésmoltdifícil.L’únicadadacertasobreaixòésqueelsenyalvaarribara Livingston10mil.lisegonsabansqueaHanford.Totiladificultatd’establirla direcciódel’onaenaquestescondicions,elscientíficsdeLIGOsituenlaseva fontenunazonaconcretad’uns600grausquadratsdel’hemisferisudceleste. Hemdeixatperalfinaleltemadelesunitatsdel’eixd’ordenadesdeles gràfiquesdelafigura5,perquèéselqueméspotdonarideadel’enorme dificultattecnològicadeladetecciód’aquestesones.Aquestesunitatsmesuren elquocient ∆L/L entrelavariaciódelongituddelsbraçosdel’interferòmetre enpassarl’onailalongitudinicial.Estracta,doncs,d’unamagnitudsense dimensió(longituddividitperlongitud).Enlesgràfiquesdelafigura5,les unitatsdel’eixd’ordenadesvanafectadesdelfactor10 21.Comentemaixòuna mica:
Launitatastronòmica(au)ésladistànciamitjanadelaTerraalSolival aproximadament1.49598 × 1014 mil.límetres.OsiguiqueapreciarunmillímetreenladistànciadelaTerraalSolseriadel’ordrede10 14.Inosaltres
estemparlantde10 21.Aixòrepresentaapreciarunmil límetreenunadistància 6600000vegadesmésgranqueladistànciadelaTerraalSol!Valadir,però,que l’aparellnocalquemesurilalongitud L delsbraçosambtantíssimaprecisió(cosa absolutamentimpossible),sinóqueelquehadedetectarsónlesvariacions ∆L d’aquestalongitud.
Referències
[1] Abbot,B.P.[etal.] (LIGOScientificCollaborationandVIRGOCollaboration).«Observinggravitational-wavetransientGW150914withminimal assumptions». https://dcc.ligo.org/public/0122/P1500229/031/GW150 914 burst.pdf
[2] Abbot,B.P.[etal.] (LIGOScientificCollaborationandVIRGOCollaboration). «PropertiesofthebinaryblackholemergerGW150914». Phys.Rev.Lett., 116,241102(2016). https://dcc.ligo.org/public/0122/P1500218/014/ PhysRevLett.116.241102.pdf.
[3] Abbot,B.P.[etal.] (LIGOScientificCollaborationandVIRGOCollaboration). «Observationofgravitationalwavesfrombinaryblackholemerger». Phys. Rev.Lett.,116,061102(2016). https://dcc.ligo.org/public/0122/P150 914/014/LIGO-P150914 Detection of GW150914.pdf.
[4] Berti,E. «Viewpoint:Thefirstsoundsofmergingblackholes». Physics,9, 17(February11,2016). https://physics.aps.org/articles/v9/17.
[5] Einstein,A. «ZurElektrodynamikbewegterKörper». Ann.derPhys.(4),17 (1905),891–921.
[6] Einstein,A. «IstdieTrägheiteinesKörpersvonseinemEnergiegehalt abhänging?» Ann.derPhys.(4),18(1905),639–641.
[7] Einstein,A. «DieGrundlagederallgemeinenRelativitätstheorie». Ann.der Phys.(4),49(1916),769–822.
[8] Einstein,A. «NäherungsweiseIntegrationderFeldgleichungenderGravitation». Berl.Ber.,1916(1916),688–696.
[9] Einstein,A. «ÜberGravitationswellen». Berl.Ber.,1918(1918),154–167.
[10] Girbau,J. «Relatividad:uncursoacelerado». Gac.R.Soc.Mat.Esp.,2(2) (1999),237–262.
[11] Girbau,J.;Bruna,L. StabilitybylinearizationofEinstein’sfieldequation. Basilea:BirkhäuserVerlag,2010.(ProgressinMathematicalPhysics;58)
[12] Minkowski,H. «RaumundZeit». PhysikalischeZeitschrift,10(1909), 104–111.[Conferènciadonadaalavuitantenareuniódecientíficsnaturals imetgesalemanys,aColònia,el21desetembrede1908]
[13] Schutz,B.F. Afirstcourseingeneralrelativity.2aed.Cambridge:CambridgeUniversityPress,2009.
[14] Stephani,H. Generalrelativity.Anintroductiontothetheoryofthegravitationalfield.Cambridge;NovaYork:CambridgeUniversityPress,1982.
178 JoanGirbau
DepartamentdeMatemàtiques
UniversitatAutònomadeBarcelona Institutd’EstudisCatalans girbau@mat.uab.cat
ButlletídelaSocietatCatalanadeMatemàtiques Vol.31,núm.2,2016.Pàg.179–193. DOI:10.2436/20.2002.01.71
Fonamentsgeomètricsdelareconstrucció3D
JoanCarlesNaranjo
Resum: Enaquestarticlefemunaintroduccióalsprincipisgeomètricsqueintervenen enlareconstrucció3Dd’unaescenaapartirdeduesimatgesdigitalsseves.Començarem explicantlamodelitzaciódelacàmeraielseucalibratge.Acontinuaciótractaremla geometriaepipolar,ésadir,l’estudidelaposiciórelativaentrelesduescàmeresdes delesqualsfemlesfotografiesdel’escena.Aquestainformacióescodificaenlamatriu fonamental,enelcasnocalibrat,ienlamatriuessencial,enelcascalibrat.Finalment descriuremcomesrealitzalareconstruccióefectivaapartirdelamatriuessencial.
Paraulesclau: càmeraestenopeica,calibratge,matriufonamental,matriuessencial.
ClassificacióMSC2010: 68T45.
1Introducció
Desdefatempsensestemacostumantqueelsordinadorsllegeixinpernosaltres. Ésbenhabitualentrarenunpàrquingiqueunacàmeraconnectadaaun ordinadorienfocadaalamatrículadelcotxe«reconegui»lesxifresilletresque lacomponen.Tambésabemquemoltesanàlisisclíniquesestanautomatitzades demaneraqueelcomptatgededeterminatstipusdecèl lulesnorequereixla intervenciódel’ullhumà.Inoenssorprenemquanensdiuenques’hapogut situarunrobotpetitsobrelasuperfíciedeMartqueesmouautònomament, decidintperellmateixquinarutahadeseguiriquinsobstacleshad’evitar;en definitiva,ésunrobotque«hiveu».
Lallistad’exemplesésinterminableicadavegadasónméspresentsenla vidaquotidiana.Labrancadelesciènciesdelacomputacióquesen’ocuparep elnomde visióperordinador (computervision)isesolconsiderarunapartde l’àmbitdelaintel.ligènciaartificial.
JoanCarlesNaranjo

Delquevolemparlaraquíésdelesmatemàtiquesques’utilitzenenalguns d’aquestsprocessos.Comqueeltemaésamplíssiminoméstenimlapretensió d’oferir-neunapinzellada,faremduesreduccionsdràstiques.Laprimeraésque tansolsparlaremdelqueesconeixcoma reconstrucció3D,que,comfàcilment espotimaginar,consisteixaextreureinformaciódeduesomésfotografies digitalsd’unmateixentornpertaldepoderdeduirlaposicióenl’espaidetants puntscomsiguipossibledel’entornoriginal.Lasegonarestricció,explicitada eneltítol,consistiràacentrar-nosenelsaspectesgeomètricsdelprocés.
2Unaexperiènciadocent
Abansdecomençarambelcontingutmatemàticvoldriaferalgunscomentaris. Nosócenabsolutunexpertenvisióperordinador,sinóquelamevarelacióamb aquestaàreaesredueixaparticiparenladocènciad’unaassignaturaanomenada geometriadelavisióperordinador enlaqualfèiemunaintroduccióaltema posantl’èmfasienlareconstrucció3D.Elqueexplicaréenlesseccionsposteriors ésunresumentodivulgatiudelamevapartdel’assignatura:lageomètrica.Res nohauriatingutsentitsinohaguésanatacompanyatdelesaltresduesparts: unaintroduccióalprocessamentd’imatges,acàrrecdeJoséIgnacioBurgos, iunespràctiquesd’ordinadorenllenguatgeCideadesiimplementadesper FerranEspunyamblacol laboraciódelmateixJoséIgnacioBurgos.Totsdos varenaprofundirmoltmésquejoenaquestaàreafinsalpuntqueJoséIgnacio BurgosvaacabardirigintlatesidoctoraldeFerranEspunyenaquesttema. L’argumentprincipald’aquestatesi[1],defensadael2009,éselcalibratgede lescàmeres,unaspectedelqualparlaremdeseguida.
Elnostreinterèsperlavisióperordinadorneixd’unseminariconjuntamb investigadorsdel’IRI(InstitutdeRobòticaiInformàticaIndustrial),dependent delCSIC,enelqualvamfixarcomaobjectiuexplorarelllibredeHartleyZisserman[3].Vamdescobriraixíunàmbitderecercamoltaplicatambun componentgeomètricimportant,especialmentprojectiu,excel.lentmentexplicatenl’esmentatllibreiqueensvaatreureimmediatament.L’aplicabilitati transversalitatdeltemaensvafercreurequepodriadonarpeuaunaassignaturaoptativa(posteriormenttambédemàster)atractivaiútilperalsestudiants delaFacultatdeMatemàtiquesdelaUniversitatdeBarcelona,comaixívaser. Diversosalumnesquelavancursarvancontinuarelsseusestudisdevisió perordinadorenaltrescentresdelnostreentornodel’estrangerihanacabat lligantlasevavidaprofessionaliacadèmicaaaquestaàrea.
3Unaaproximaciódebutxacaal’espaiprojectiu
Comveuremenlaproperasecció,lamodelitzaciódelescàmeresfotogràfiques sesimplificaquanesconsideraenelcontextprojectiu.Donem-neunaidea intuïtivaabansd’entrarendefinicions:l’espaiprojectiuassociata Rn consisteix aafegirpuntsnousquecorresponenales«direccionsdefuga»delnostre espaiafí.Enpoquesparaules,ésunobjectegeomètriconconviuenelspunts ielsvectorslliurescomaelementsdelmateixconjunt.Lamaneramésfàcil d’introduir-loésutilitzantlesanomenades coordenadeshomogènies.Posem-nos enelcastridimensional(n = 3)perfacilitarlanotació.Unpuntdelnostreespai projectiu P3 estàdeterminatper quatre constantsrealsordenadesqueposem delaforma (x : y : z : t) iqueestansubjectesaduesnormes:nototeselles sónnul.lessimultàniament,iduesquàdruples (x : y : z : t) i (x : y : z : t ) sónconsideradesiguals(oquerepresentenelmateixpuntde P3)siexisteix unaconstantdeproporcionalitat λ demaneraque x = λx, y = λy, z = λz i t = λt.Així,siladarreracoordenada t ésnonul.lapodemdividirperella iobtenirunelementdelaforma (a : b : c :1),enquèlestresprimeres coordenadesestannormalitzades.Identificant (a,b,c) ambunpuntde R3 , tenimlaigualtatdeconjunts:
P3 = R3 ∪{(x : y : z : t) | t = 0}.
Aquestadarreraigualtatposademanifestlaideaexpressadainicialment:l’espai projectiu P3 ésunaunió(disjunta)delspuntsdel’espaiafíordinari R3 amb unplad’equació t = 0queparametritza,mòdulmultiplicacióperescalar,els vectorsdel’espai.Així,larectaafí (a,b,c) + (u1,u2,u3) s’identificaambla rectade P3 quepassapelspuntsdecoordenadeshomogènies (a : b : c :1) i (u1 : u2 : u3 :0).Enparticular,duesrectesparal.lelesde R3 passenaserdues rectessecantsielpuntd’interseccióestrobaalpladel’infinit.
JoanCarlesNaranjo
4Geometriad’unavista:càmeresimatrius
Demaneramoltsimplificadaespodriadirqueunacàmerafotogràficaconsisteix enunaparellqueenactivar-loelsraigsdellumhipenetrendinsperunforat minúsculiimpactenenunpla.Demaneraidealpodempensar,doncs,queuna càmeraéselparellformatperunpunt C peronpassalallumqueesrepde l’escena,queanomenem centre,iperunpla R anomenat retinal.Aquestmodel s’anomena modelestenopeic (pinholemodel)ode càmeraobscura
Suposaremqueelplaestàrecobertpersensorsdigitalsquetenenlacapacitat decaptarelcolordelraigdellumquehihaimpactatguardant-loenlamemòria demaneracodificada,perexempleambuncodiRGBformatpertresnombres, cadascunde0a255,queensindiquenlaintensitatd’il luminacióvermella(R), verda(G)iblava(B)quecalposarperobtenirelcolorcorresponent.Avuidia totsestemfamiliaritzatsambelterme megapíxel utilitzatenrelacióambuna càmerafotogràfica.Aquesttermeveadirquantssensorstindremenelpla retinali,pertant,quinaqualitattindràlanostracàmera(senseentrarenaltres aspectestantomésimportants,comaral’òptica):comméspíxelsméssensors i,pertant,mésinformaciórecollidapercentímetrequadrat.
Permodelitzargeomètricamentunacàmera,laveiemcomunaaplicació
R3 \{C} →R enquès’enviaunpunt M del’espai(unamicapomposamentsesoldirqueés unpunt delmón)alpuntdelplaretinal m obtingutintersecantlarecta MC amb R
Posemcoordenadesdemaneraquel’origen (0, 0, 0) siguielpunt C iqueel plaretinal R siguielpla z = f ,on f ésladistànciaentreelcentreielplaretinal, queéselques’anomena distànciafocal.Anomenem puntprincipal laprojecció ortogonaldelcentresobreelplaretinal;éselpuntdecoordenades (0, 0,f). Uncàlculsenzillensdiuquesi M = (x,y,z),aleshores m = (fx/z,fy/z,f) Trobemaquíunadelesmotivacionsperpassar-nosalcàlculambcoordenades homogènieso,ditd’unaaltramanera,per«projectivitzar»elproblema:evitar quocients,convertirlatransformacióenlineali,pertant,poderrepresentar matricialmentelnostremodel.Consideremlacàmeracoml’aplicació:
queenvia M = (x : y : z : t) a m = (fx : fy : z).Tenimaixíunatransformació governadaperlamatriu
Enrealitat,lescosesnosóntansenzilles.Quanmovemlacàmera,les coordenades«món»vanvariantsegonsunarotacióiunatranslació.D’altra banda,lescoordenadesescollidesdinselplaretinalnosónnaturals;sónmolt simplesdesd’unpuntdevistamatemàtic,peròpocajustadesalamaneracom realmentespodenportaratermeelscàlculs.Lainformacióqueensdónauna fotografiaésunacol.lecciódecodisdecolorscadascundelqualscorresponaun píxel.Pertant,semblamésapropiatusaraquestaxarxadiscretadepetitíssims quadradetsqueconstitueixenlaimatge.Perfer-hoagafemcomaorigende coordenadesl’extremsuperioresquerredelanostragraelladesensors,icoma eixos,lesdireccionsquemarquenelsmateixospíxels.Lesunitatslesdonen leslongitudshoritzontaliverticaldelpíxel.Aquestsistemadecoordenades
Punt
P3 \{C} → R
JoanCarlesNaranjo
noésnecessàriamentortogonal,jaque,permoltperfectaquesiguilanostra càmera,l’angle θ entreelseixospotserlleugeramentdiferentde90graus,de lamateixamaneraqueelspíxelspodennoserquadratsperfectesi,pertant, lesunitatshoritzontalsiverticalsnohandesernecessàriamentiguals.
Laconveniènciad’usaraquestsistemadecoordenadesésfàcild’explicar: suposemquehemfetduesfotografiesambunacàmeradigitald’unatorredes deduesposicionsdiferents.Perferunareconstrucció3Denelnostreordinador apartirdelesduesimatges,elprimerquenecessitaremésreconèixerencada imatgepunts«queescorresponen»,osiguiqueprovenendelmateixpuntdela realitat.Enparticular,necessitaremreferir-nosapuntsconcretsdecadaimatge d’unamaneramanejableiquinaaltramaneramillorhihaquefer-hodient, perexemple:elpuntmésaltdelatorrehasortitrepresentatenlaprimera fotografiaenelpuntqueestà3240píxelscapaladretai5329capavall?
Aquestcanvidecoordenadescomportal’entradaenescenad’unadeles matriusquetenenunpaperméscentralentotelproblema:la matriude calibratge.Consisteixenlamatriuquetransformalescoordenadesquehavíem presinicialmentenelpla z = f enlescoordenadespíxelquehemconsiderat després. e1 v1 v2 e2 θ
Eneldibuixsuperior,elsvectors v1 i v2 sóndeterminatsperlaformadel píxel,mentrequeelsvectors e1 i e2 corresponenalabaseortogonalqueestem utilitzantal’espai.Anomenem kh i kv elquociententrelaunitatdemesuraque utilitzem(centímetres,mil.límetres…)ilagrandàriahoritzontal,respectivament vertical,d’unpíxel.Ditd’unaaltramanera, kh i kv ensdiuenquantspíxels cabenenunaunitat.L’angle θ mesuraquantdistaelpíxeldeserrectangular (habitualmentésgairebéde90graus).Obtenimfàcilmentlesfórmules:
e1 = kh · v1, cos(θ) · e1 + sin(θ) · e2 = kv · v2.
Finalment,si (u0,v0) sónlescoordenades(píxel)delpuntprincipal,trobem delesigualtatsanteriorsquelamatriudelcanvidereferènciaomatriude calibratgeéscomsegueix:
Dedicaremlaproperaseccióaposarenrelleul’interèsilesformesde càlculdelamatriudecalibratge.Ara,percloureaquestadiscussiósobrela modelitzaciódelacàmeraestenopeica(pinholecamera),notemquelamatriu associadaalacàmera,amblamàximageneralitatpossible,lapodemescriure delaforma:
on R éslamatriudequatrefilesiquatrecolumnescorresponentaunarotació R seguidad’unvector(columna)detranslació t:
5Compodemsabercomésperdinslacàmera:uncop demartell?
Aturem-nosunmomentenlainformacióqueproporcionalamatriudecalibratge queensacabad’aparèixer:elscincparamètres kh, kv , θ, u0, v0 ensdiuencom éslacàmeraperdintre.Fixem-nosquebàsicamentensindiquenladisposició ilaformadelssensorsi,també,laposiciórelativadelcentreidelplaretinal. Peraixòse’lsanomena paràmetresinterns.Caldriaafegir-hiladistànciafocal f , peròladeixaremdebandaatèsquefaremlanostrareconstrucció3Dsense atendreelfactord’escala.Esbrinartotsaquestsvalorséselqueesconeixper calibrarlacàmera.Percomoditat,suposaremque f éslanostraunitatde mesura,demaneraque A ésdelaforma:
Arapodemsimplificarperobtenirlamatriudetresfilesiquatrecolumnes
· R = (R | t).
Aixídoncs,lamatriudelacàmeraespotescriuredelaforma: K (R | t).
JoanCarlesNaranjo
Peròtornantalproblemaquehemplantejat:compodemcalibrarlanostra càmera?Òbviament,elrecursdedesmuntar-lademaneramésomenysviolenta (ambuntornavísouncopdemartell)éspocviable.Lasolucióques’aplicaés forçaimaginativa.Totilasevacomplexitatquanesposaalapràctica,se’npot explicarlaideaessencialenpoquesparaules.Comencempertriarobjectesdels qualstinguemunainformaciómètricamoltprecisa(endiem patrons)ienfem fotografiesamblanostracàmera.Elspatronspossiblespodenserdemolts tipusis’hadetenirpresentqueseleccionar-neunsoaltrespotincidirenla precisiódelsnostresresultats.Perfixaridees,pensemenundebensimplei moltutilitzat:untaulerd’escacsambcasellesblanquesinegres.
Ésunafiguraplana,laqualcosaintrodueixunlligamenlescoordenades espacialsdelspunts,contémoltsparellsderectesformantanglerecteitémolt contrastentreelsdoscostatsdecadarecta.Aquestadarrerapropietattéun pesimportantenlapartdelahistòriaquedeliberadamentestemamagantsota lacatifa:el processamentdelaimatge,delqualparlaremunamicamésavall. Suposemdemomentque,uncopfeteslesfotografiesdelspatrons,podem reconèixerencadaimatgequinescoordenadespíxeltenenelsvèrtexsdeltauler. Apartird’aquí,elmètodeésrelativamentsimpletotiqueproufeixuccom pernodescriure’lambdetall:diguem,simplement,queésfàcilsaberquines propietatsmètriquesdeltaulerd’escacsfísicsónheretadesperlasevaimatge fotogràficaique,enimposar-les,trobemlesequacionsquepermetencalcular-ne elsparàmetresinternsi,pertant,calibrarlacàmera.
Aquestaideatannaïfestàenvoltadadedificultatsquerequereixenl’úsde tècniquesmoltvariades.Percomençar,siintentemobrirambuneditorunafotografiaenformatJPG,tindremdificultatsserioses,jaqueésunformatcomprimit ques’utilitzaperdisminuirsensiblementlagrandàriadelfitxerique,pertant, perdinformació.Nopodemaquíestendre’nsenaquesttema,peròvallapena esmentarqueaquestacompressiós’aconsegueixamblaintervenciódecisivade latransformadadeFourierenlasevaversiódiscreta.Uncopdescomprimida,
tindremunfitxerdetextpledexifresagrupadesde9en9.Cadascund’aquests blocsconstadetresentersquevarienentre0i255.Perexemple,sielfitxer començaper
000000000
voldràdirqueelpíxeldelacantonadasuperioresquerraésnegre,isicomença per 255255255, elpíxelseràblanc.Lateoriadelprocessamentd’imatgesensensenyaaextreure informacióapartird’unfitxercomaquest.Unatècnicabàsicamoltútilper altipusdefotografiaquetenim(nohooblidem:untaulerd’escacsenblanc inegre)consisteixarestaracadacodidecolorelcodidelpíxelprecedent. D’aquestamanera,mirantelscodisnonuls,detectaremaproximadamentles líniesqueenvoltenlescaselles.Ésunprimerpasquedónaresultatsmolt minsosiques’hadecompletarambmoltesaltrestècniquesméselaborades perdetectarformes,aïllar-les,segmentar-les…Ellectorcurióspotdescobrirles basesd’aquestavastaàreadelacomputaciódonantuncopd’ull,perexemple, alllibredeGonzalez-Woods[2].
Completadaambèxitl’anàlisidelafotografia,disposaremdelainformació aproximadaquebusquem.Saltaalavistaqueelserrorssónconsubstancials alprocés,enprimerlloc,perlanaturalesadiscretadelesdadesinicials.Així doncs,elcàlculdelsnostresparàmetresintrínsecsestaràcontaminatd’aquestes imprecisions.Perminimitzarl’error,realitzaremmésfotografiesdelpatróde maneraqueelnostresistemad’equacionsseràsobredeterminat.Finalment caldràusarmètodesd’àlgebralinealnumèrica,majoritàriamentbasatsenla descomposicióSVDdelesmatrius,pertrobarunasolucióòptima.Noensendinsemencapd’aquestspassosquehemdescritdemaneratansuperficial perquèelnostreobjectiuésfocalitzar-nosenlapartgeomètricadelareconstrucció3D,peròesperemhaverfetintuirlavarietatdetècniquesmatemàtiques idecomputacióqueintervenenenlasoluciód’aquestproblema.
6Duesvistes
Comveuremdeseguida,lareconstrucció3Desbasaendospilars:conèixer lescàmeresperdinsisaberlaposiciórelativadelescàmeresenelmoment enquèesfanlesduesfotografies.Pertractaraquestasegonaqüestió,ens trobemenunadisjuntivasemblantaladelcalibratge:usemlacintamètrica, eltransportadord’angles,unmesuradorlàseroqualsevoleinafísicaméso menysmoderna?;o,percontra,usemlesfotografiesfetesperlamateixacàmera perextreurelainformaciónecessàriaperdeterminarlasituaciódelesnostres càmeres?Ésclarqueensdecantaremperlasegonapossibilitat,peròésuncamí quenoestàlliured’algunesdificultats.Observemprimerqueelquepretenem calcularésdenouunainformaciómatricial.Enefecte,siposemcomaorigen decoordenadeslaprimeracàmera,osigui,sisuposemquelaprimeracàmera télamatriu:
JoanCarlesNaranjo
(I3 éslamatriuidentitat3per3),aleshoreslasegonaserà
M2 = K2 · (R | t),
ilaparella R,t ésexactamentlainformacióbuscada:comcalrotaritraslladar laprimeracàmerapersuperposar-laalasegona.
Elnostreobjectiuenaquestaseccióésdescriureunpasintermedienla recercade R i t,quequedaperamésendavant.Perfer-hoincorporemuna novadefinicióqueresultamoltintuïtiva:diremquedospunts m1 i m2,un decadaplaretinal,són corresponents sitotsdosprovenendelmateixpunt delmón.Perexemple,sifemduesfotografiesd’uncampanarin’assenyalem acadafotografiaelpuntmésalt,estemseleccionantunaparelladepunts corresponents.Enaquestexempleutilitzemlanostracapacitatperreconèixer objectesvisualmentiésjustaixòelquevolemevitar.Unamicadegeometria enspotajudaradonarestructuraalspuntscorresponents.Comencemper observarque,donatunpunt m1 enelprimerplaretinal,hihamoltspunts potencialmentcorresponentsambellenelsegonpla.Enefecte,unim m1 amb elcentredelacàmeraisuposem,demaneraideal,quelarectaaixídeterminada espotpintard’alguncolor,comsifosunraiglàser.
Lafotografiaamblasegonacàmeradelarectaacoloridadibuixaenel segonplaretinalunarecta l(m1).Tenimaixíunaaplicacióqueassociaalestres coordenades(projectives)delpunt m1 elstrescoeficientsdelarecta l(m1) ique, persort,éslineal.Aixídoncs,tenimunamatriudetresfilesitrescolumnes F , anomenada matriufonamental,quedeterminaaquestaaplicació.Calremarcar duespropietatsimportantsperentendreicalcular F (e1 i e2 són,coms’indica eneldibuix,elstallsdelarecta C1C2 ambelsdosplans):
a) Lamatriutérang2:comespotobservarenlafigurasuperiortoteslesrectes l(m1) passenpelpunt e2 (anomenat epipol);pertant,nopodemesperar exhaustivitat.Delamateixamanera,noésinjectivajaquetotselspunts delarectaquepassaper e1 i m1 tenenlamateixarecta l(m1) associada.
b) Nocostagaireadonar-sequeunaparelladepunts (m1,m2) sóncorresponentssi,inoméssi,tenimlarelació mT 2 Fm1 = 0.
Veuremquelamatriufonamentaléslapeçaquepermettrobarlesmatrius R i t,ésadir,laposiciórelativaentrelescàmeres.És,doncs,importantaprendrea calcular-la.Lespropietatsanteriorsdonenunaideadecomesfa:suposemque tenimunacol.lecciódepuntscorresponentsproporcionadaperalgunatècnica deprocessamentd’imatges.Imposantlapropietatb)tindremunsistemad’equacionsquepermetràcalcularelscoeficientsde F .Unalgorismemoltconegut éseldels setpunts:s’imposaquesetparellesdepuntssiguincorresponents. Comquelanostramatriuestàdeterminadallevatdemúltiple,arribemauna famíliadesolucionspossiblesquedepenend’unparàmetre.Demanantqueel determinantsiguizeroobtenimunpolinomidetercergrauque,habitualment, noméstéunasolucióreali,pertant,determina F .Calremarcarqueuncop trobadalamatriufonamentaltenimunaeinaaddicionalperalcàlculdeparelles corresponents:d’unabandalapropietatb)ensdónaunarestriccióquepermet descartarcorrespondènciesfalses,idel’altra,espotusar F per rectificar les fotografiesdemaneraqueleslíniesepipolars l(m1) siguintoteshoritzontals, laqualcosasimplificalalocalitzaciódeparellesdepuntscorresponents.
Finalment,abansdeclourelasecció,unesmentdeladificultatdetrobar puntscorresponents.Hihamoltsmètodesi,sovint,lestècniquesméseficients sóncombinacionsdemoltsd’ells.Unaideamoltsimpleperòquedónauna primeraaproximacióalproblemaéslasegüent:consideremfinestrespetitesde píxelsdinsdecadafotografia;perexemple,quadratsde5per5píxels.Cada quadratespotveurecomunamatriuenlaquallesentradessónelscodisRGB delspíxels.Prenentalgunanociódedistànciaentrematrius,podemprovar d’identificarquadratsmoltpropersd’unaialtrafotografia.Siladistànciaés realmentmoltpetita,aixòensindicaquepossiblementelscentresdelsquadrats escorresponen.
7Reconstrucció3D
Enaquestaseccióexplicaremcomesportaatermelareconstrucciópartintde leseinesintroduïdesenlesdarreresseccions:suposemquehemsabutcalibrar lescàmeresi,pertant,queconeixemlesmatrius K1 i K2,quehemcalculattambé delamatriufonamental F i,finalment,quedisposemd’unabonacol.leccióde parellesdepuntscorresponents P ={(m1,i,m2,i)}.Abansdedirquèpodem ferambtotaaquestainformació,uncomentarisobreelconjunt P :lafacilitat perobtenirunacol lecció P ambmoltspuntsidemolta«qualitat»dependràdel tipusd’entornqueintentemreconstruir.Òbviament,duesfotografiesdelmateix celblauensdonaranpoquesoportunitatspertrobarparellessignificatives,i lareconstrucciónotindràcapsentit.Delamateixamanera,potpassarque unpuntdelmónsurtienunadelesfotografiesinoenl’altrai,pertant,no originaràunaparelladepuntscorresponents.Saltaalavistaqueelnostre objectiuseràméscomplicatenfotografiesfetesalanaturaquelesqueesfan enl’entornurbàoenunespaitancatonabundenleslíniesrectes,elscanvis moltcontrastatsdecolorsielsvolumsmésgeomètrics(devegadesesdiuque ésun entornestructurat ).
JoanCarlesNaranjo
Tornantalnostrediscursinicial,jahemcomentatquepodemsuposarque lesmatriusquemodelitzenlesnostrescàmeressóndelaforma:
M1 = K1 · (I3 | 0) i M2 = K2 · (R | t).
Sirealmentconeixemlesduescàmeres,osigui,siobtenim K1, K2, R i t,podemesperarqueelspuntsdelmón P delsqualsprovenenlesnostres parellesespuguincalcular.Enefecte,conèixerlesmatriusdecalibratgeequival asaberonestàposatelcentredecadacàmeraenrelacióambelsplansretinals corresponents.Amésamés, R i t ensdonenlaposiciórelativaentrelesdues càmeres;pertant,podempassarunraigdellumpelcentredelaprimeracàmera iunpunt m1,i iunaltreraigdellumpelcentredelasegonacàmeraiper m2,i,i obtenimduesrectesqueestallaranenelpuntqueestembuscant.Bé,enrealitat elmésprobable,acausadelserrorsacumulats,ésquenoestallinsinóque passinmoltaprop,demaneraquecaldriatrobarelspuntsdecadaraigque minimitzenladistànciaiprendreelpuntmitjà.
Enrealitatelqueacabemdedirpreténdonarlaideadeperquèlainformació K1, K2, R, t éslanecessàriaperalareconstrucció3D;però,pelquefaalcàlcul, elplantejamentéslleugeramentdiferent:elpunt Xi delmónquecorresponal parell (m1,i,m2,i) éslasolucióde
M1 Xi = m1,i,
M2 Xi = m2,i (lescoordenadesde Xi s’hand’escriure«normalitzades»,osigui, Xi = (xi,yi,zi, 1)).Utilitzanttècniquesd’àlgebralinealnumèricaobtenim,sempreaproximadament,lescoordenadesdelpuntbuscat.
Comaresumd’aquestasecció,podemdirqueelproblemadelareconstrucció quedareduïtalcàlculdelesmatrius R i t apartirdelesdades K1, K2 i F .Aquest éselcontingutdelaproperasecció.
8Lamatriuessencialilasevadescomposició
Enarribaraaquestpunthemconvertitelproblemadelareconstrucció3Denun problemapuramentmatricial:gràciesaunacombinaciódemètodesmoltvariats hemaconseguitdisposardelesmatrius K1, K2, F (aquestadarreradeterminada llevatdemultiplicarperunaconstant)iunacol.lecciódeparellesdepunts corresponents.Segonselquehemexplicatenladarrerasecció,peracabar nomésensquedacalcularlamatriuderotació R ielvectordetranslació t.El resultatcrucialenaquestapartdelateoriaéslarelaciósegüent(entrematrius detresfilesitrescolumnesderang2):
KT 2 FK1 = [t]x · R, on [t]x ésunamatriuantisimètricaconstruïdaapartirdelvectordetranslació t = (t1,t2,t3) delaformasegüent:
Aquestarelacióposademanifestdemaneraexplícitaelquejahavíem avançat:lamatriufonamentalcodificalaposiciórelativaentrelescàmeres.Val adirquelamatriu E := KT 2 FK1 queapareixalarelaciórepalaliteraturaelnom de matriuessencial.Observemqueéscalculableapartirdelesnostresdadesi queelquevolemésdescompondre E enelproducte [t]x · R.Justifiquemara queaixòespotferdemaneraúnica,llevatdesigne.Osigui,enrealitathiha quatredescomposicionspossiblesdelesqualsnomésunaéslaqueensconvé. Noésgairedifícileliminar aposteriori aquestaindeterminació:siagafemun signeinapropiatpera R opera t,honotemenelfetqueelconjuntdepunts P queusemperalareconstrucció3Dquedasituat«almateixcostat»queelcentre d’algunadelescàmeresenrelacióambelplaretinal.
Recuperacióde t
Atèsquelamatriu E estàdeterminadallevatdelamultiplicacióperunaconstant, comencempernormalitzar-lad’algunamanera.Imposemquelanormade lamatriusigui1, E = 1.Usemcomanormal’euclidianade R9 després d’identificarlamatriuambunpuntd’aquestespai.Ésadir,estemimposant quelasumadelsquadratsdelesentradesdelamatriusigui1.Així E quedarà fixadallevatdesigne.Aquestanormadematriusqueestemconsiderantté propietatsforçaagradables.Perexemple,ésfàcilcomprovarquelanormaal quadratd’unamatriu A éslatraça(sumadelselementsdeladiagonal)dela matriu A · AT .Enparticular,sisuposem E jadescomposta, E = [t]x · R,tenim:
JoanCarlesNaranjo
Pertant,fixarlanormadelamatriuessencialequivalafixarlanormadelvector detranslació t 2 = 1 2 .Perunaltrecostatobservemque:
ET = RT · [t]T x =−RT · [t]x
Atèsquelamatriu [t]x ténucli t i R tédeterminantnonul,elnuclide ET ilacondiciósobrelanormaensproporcionen,llevatdemúltiple,elvectorde translació t.
Unicitatllevatdesignedeladescomposició Uncopelvectordetranslació t ésconegut,lamatriu R quedadeterminadaper lesequacions:
E = [t]x · R,
R · RT = I3
Notemquenopodem«aïllar» R enfuncióde E i [t]x perquèlasegonamatriu noésinvertible.Aquestsistematéunaúnicasolució(deixantdebandaelsigne). Lademostracióesbasaenunbonicargumentgeomètricquevolemcompartir ambellectorquehaaconseguitarribarfinsaquí.Suposemquetenim:
E = [t]x R = [t]x R , on R ésunaaltrarotació.Aleshores,multiplicantperladretaamblamatriu transposadade R tenim
[t]x R R T = [t]x .
Transposanttotalaigualtat,ensquedaquelarotació R0 = R · RT satisfà:
R0 · [t]x = [t]x Hihaunacaracterísticadelesmatrius [t]x enlaqualnoheminciditfinsarai queésmoltfàcildecomprovarusantlasevadefinició:peraqualsevolvectorde l’espai u,laimatge [t]x (u) éssimplementelproductevectorial t ∧ u.Pertant, laimatgedel’aplicacióambmatriu [t]x éselsubespaivectorialdedimensió2 formatpelsvectorsortogonalsa t.Laigualtatobtingudamésamuntensdiu que R0 deixainvariants(sónvectorspropisdevalorpropi1)totselsvectors ortogonalsa t.Atèsqueunarotaciódel’espaiquenosiguilaidentitatnomés deixainvariantselsvectorsd’unsubespaidedimensió1(elseueix),tenimque R0 = I3 i,pertant, R = R .
9Resumiconclusió
Sifemunallistaordenadadelsprocessosquehanintervingutenelmètode explicatperalareconstrucció3D,trobem:
a)Enprimerlloc,calibremlescàmeresusantfotografiesdepatrons.
b) Acontinuació,localitzemambtècniquesdeprocessamentd’imatgesalgunesparellesdepuntscorresponents.
c) Aquestesparellesdepuntsenspermetencalcularlamatriufonamental mitjançant,perexemple,elmètodedelssetpunts.
d) Usantlainformacióproporcionadaperlamatriufonamental,rectifiquem lesfotografiesicalculemmésparellesdepuntscorresponents.
e) Calculemlamatriuessencialilasevadescomposicióenrotacióitranslació.
f) Calculemelspuntsdelmónquecorresponenalesparellesdepunts corresponents.
Aquestallistadeprocedimentsquebarregengeometrialinealiprojectiva, àlgebralinealnumèrica,mètodesd’optimització,processamentd’imatgesi programació,entred’altres,dónaunaideadelavarietatitransversalitatala qualfèiemreferènciaal’inicid’aquestesnotes.
Nota. Lesfiguresdelespàgines183,188i190hanestatrealitzadesambel programaGeogebra.
Agraïments
VullagrairafectuosamentaAnnaPuigiaFerranEspunylalecturad’unaversió prèviad’aquestesnotes.Lessevesaportacionshanmilloratnotablementel resultatfinal.
Referències
[1] Espuny,F. Self-CalibrationofProjectiveandGenericCentralCameras.Tesi doctoral.UniversitatdeBarcelona,2009.
[2] Gonzalez,R.C.;Woods,R.E. DigitalImageProcessing.3aed.UpperSaddle River,NJ:PrenticeHall,2008.
[3] Hartley,R.;Zisserman,A. MultipleViewGeometryinComputerVision. 2aed.Cambridge:CambridgeUniversityPress,2004.
DepartamentdeMatemàtiquesiInformàtica FacultatdeMatemàtiquesiInformàtica UniversitatdeBarcelona jcnaranjo@ub.edu
ButlletídelaSocietatCatalanadeMatemàtiques Vol.31,núm.2,2016.Pàg.195–196
Englishsummaries
NatàliaCastellana
Onceuponatimetherewasafixedpoint…
OneoftheclassicalresultswecanfindintheliteratureonAlgebraicTopology isBrouwer’sFixedPointTheorem,provedusingcoveringspacestechniques, fundamentalgroupcalculationandhomologygroups.Inthispaperwepresent aproofbasedonalemmafromtopologicalcombinatorics,Sperner’sLemma, whichavoidsthetechniquesmentionedabove.
Keywords: algebraictopology,combinatorics,fixedpoint.
MSC2010SubjectClassification: 55M20,91A06.
CarlosD’Andrea
Movingcurvesidealsandtheirinteractionwithcomputer-aidedgeometricdesign
WepresentacaseoffruitfulinteractionbetweenCommutativeAlgebraand Computer-AidedGeometricDesign.Somechallengesinthisappliedandincreasinglyimportantareaofinformaticshavebeenshiftedtoabstractalgebraic structures,andhaveenrichedMathematicswithseveraltheoreticalresultsand openproblemswhichweexplaininthistext.
Keywords: rationalparameterizations,planecurves,ReesAlgebras, µ-bases, minimalgenerators.
MSC2010SubjectClassification: Primary:14H50;Secondary:13A30,68W30.
JoanGirbau
Detectionofgravitationalwaves
Theaimofthispaperistopresentthebasictheoryofgravitationalwavesfor mathematicianswithknowledgeofgeneralrelativityandexplainthemethods thatcanbeusedtodetectthem.Wewillalsoexplainthemaincharacteristicsof theastronomicalobservationmadeonSeptember14,2015byLIGO’sdetectors.
Keywords: gravitation,gravitationalwaves,GW150914.
MSC2010SubjectClassification: 83C35.
JoanCarlesNaranjo
Geometryin3Dreconstruction
Thegoalofthispaperistodescribethegeometricfundamentalsofthe3Dreconstructionofasceneusingtwoimagesobtainedfromtwodigitaldevices. Wewillstartbyexplainingthecameramodelanditscalibration.Thenwewill focusontheepipolargeometrywhichanalyzestherelativepositionbetween thetwocameras.Thisinformationiscodifiedbythefundamentalmatrixinthe non-calibratedcase,andbytheessentialmatrixinthecalibratedcase.Finally, wewilldescribehowtoeffectivelyreconstructthescenefromtheessential matrix.
Keywords: pinholecamera,calibration,fundamentalmatrix,essentialmatrix.
MSC2010SubjectClassification: 68T45.
Instruccionsperalsautors
Elsarticlessotmesosapublicaciós’hand’enviaralseditorsoaqualsevol membredelcomitèeditorial,percorreuelectrònic,preferentmentenformat PDF.Elsoriginalshandecontenirlaversióanglesadeltítol,unresumbreuen catalàienanglès,paraulesclauencatalàienanglèsielscodisdelaclassificació permatèriesMSC2010.
Lesversionsdefinitivesdelsarticlesacceptatss’handepresentarencodiTEX, preferentmentenl’estilLATEXpropidel Butlletí.Aquestestilespotobtenira lespàgineswebdelaSocietatCatalanadeMatemàtiques(SCM).Femnotarque enaquestapublicaciós’utilitzapreferentmentelpuntperaseparardecimals, enllocdelacomarecomanadaperl’IEC,perpoderfacilitarlacomprensióde lesexpressionsmatemàtiques.Pertald’accelerarelprocésdeproducció,es pregaalsautorsquesegueixinlesindicacionscontingudeseneldocument d’exemple.
Laversióenpaperdel Butlletí s’imprimeixenblancinegre.Quanun articlecontinguifiguresencoloriesconsidericonvenient,l’autorproporcionarà unaversiódelsgràficssubstituintelcolorpertonsdegrisosilíniesdegruix variable.Aixímateixmodificaràelscomentarisquefacinreferènciaalcolorde lesfigures.Enqualsevolcasel Butlletí publicaràl’originalencolorenelseu formatelectrònic.
Elsautorsdelsarticlespublicatsal Butlletí enreteneneldretdecòpia (copyright)iautoritzenl’IECadifondre’ls,tantatravésdelapublicacióimpresa commitjançantelsportalsdigitalspropisod’altresambquès’estableixinels convenisoportunsaaquestefecte.Ésresponsabilitatdelsautorsassegurar queesdisposadelsdretsdereproducciódelsgràficsidelesfiguresquehi apareguin.CadaautorrebràunacòpiaenPDFd’altaqualitatdelaversiódigital delseuarticleiunexemplarimprèsdelnúmerodel Butlletí enelquales publiqui.
Lacorrespondènciaadministrativarelacionadaambel Butlletí s’had’adreçaralaSCM.
JuliàCufí(editorencap)
Comitèeditorial
DepartamentdeMatemàtiques UniversitatAutònomadeBarcelona jcufi@mat.uab.cat
BartomeuColl
Dep.deMatemàtiquesiInformàtica UniversitatdelesIllesBalears tomeu.coll@uib.cat
NúriaFagella
Dep.deMatemàticaAplicadaiAnàlisi UniversitatdeBarcelona fagella@maia.ub.es
JosepMariaFont
Dep.deProbabilitats,LògicaiEstadística UniversitatdeBarcelona jmfont@ub.edu
ArmengolGasull
DepartamentdeMatemàtiques UniversitatAutònomadeBarcelona gasull@mat.uab.cat
GáborLugosi
ICREAiDepartamentd’Economia UniversitatPompeuFabra gabor.lugosi@upf.edu
RosaCamps(editoraadjunta) DepartamentdeMatemàtiques UniversitatAutònomadeBarcelona rcamps@mat.uab.cat
JorgeMateu
DepartamentdeMatemàtiques UniversitatJaumeI mateu@mat.uji.es
MarcNoy
DepartamentdeMatemàticaAplicadaII UniversitatPolitècnicadeCatalunya marc.noy@upc.edu
FrancescPlanas
DepartamentdeMatemàticaAplicadaI UniversitatPolitècnicadeCatalunya francesc.planas@upc.edu
AgustíReventós DepartamentdeMatemàtiques UniversitatAutònomadeBarcelona agusti@mat.uab.cat
MartaSanz-Solé
Dep.deProbabilitats,LògicaiEstadística UniversitatdeBarcelona marta.sanz@ub.edu

SocietatCatalanadeMatemàtiques
La SocietatCatalanadeMatemàtiques(SCM) ésunasocietatfilialdel’Institutd’EstudisCatalans,quecontinualesactivitatsdelaSecciódeMatemàtiques delaSocietatCatalanadeCiències,quefoufundadaperl’Institutl’any1931. Lesfinalitatsdela SCM són:elconreudelesciènciesmatemàtiques,l’extensió delseuconeixementenlasocietatcatalana,elfomentdelseuensenyament idelasevainvestigacióteòricaiaplicada,aixícomlapublicaciódetotamena detreballsques’adeqüinaaquestsobjectius.La SCM desenvolupalesseves activitatsenlesterresdellenguaiculturacatalanes.Elcatalàés,doncs,la llenguapròpiadela SCM ilaqueésusadanormalmententotselsseusactesi publicacions.
La SCM editalespublicacionsperiòdiques SCM/Notícies i Butlletídela SocietatCatalanadeMatemàtiques.Elssocisdela SCM reben,gratuïtament, aquestesduespublicacions.
La SCM téconvenisdereciprocitatambdiversessocietatsmatemàtiques d’arreudelmón,mitjançantelsqualselssocisdela SCM obtenenunareduccióenlaquotadesocid’aquestessocietats.Aixímateix,elssocisdela SCM podenfer-sesocisdelaSocietatMatemàticaEuropeapagantunaquota complementària.
LaJuntaDirectivadela SCM estàconstituïdaperlespersonessegüents:
President:XavierJarqueiRibera
Vicepresident:EnricVenturaiCapell
Adjuntadelavicepresidència:IolandaGuevaraiCasanova
Secretari:AlbertRuiziCirera
Tresorera:NatàliaCastellanaiVila
Vocals:NúriaFagellaiRabionet,JosepGranéiManlleu,Agustí ReventósiTarrida,CarlesRomeroiChesa,OriolSerraiAlbó,Esther Silberstein,ManelUdinaiAbelló
Delegatdel’IEC:JoanGirbauiBadó
L’adreçadela SCM éscarrerdelCarme,47,08001Barcelona.Telèfon: 933248583.Fax:932701180.Correuelectrònic: scm@iec.cat.Adreçaweb: http://scm.iec.cat.