CURSO 2022-2023
TÍTULO DEL PROYECTO: Aprendizaje federado en robots para detección temprana de enfermedades en cultivos en invernaderos.
Convocatoria
Prototipos orientados al mercado en TCUE
CURSO 2022-2023

Autor: Carlos Alberto Gordillo Gordillo
Tutor/a Académico:







Tutora: Vivian Félix López Batista
Cotutor: Paul David Rosero Montalvo (IT University of Copenhagen)
Esta
programa
Europeo
Desarrollo Regional (FEDER) y la Junta
León
actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un
operativo cofinanciado por el Fondo
de
de Castilla y
•
•
• Conclusiones
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
2022-2023 Índice
CURSO
Introducción
• Objetivos
• Movimiento del Robot
• Monitoreo de variables
Visión artificial
• Producto final
Aprendizaje federado en robots para detección temprana de enfermedades en cultivos en invernaderos.

Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
• En los últimos años, el uso de la tecnología en el campo agrícola ha experimentado avances significativos, y uno de los desarrollos más prometedores es la aplicación de robots con en la detección de enfermedades en cultivos en invernaderos
• El uso de robots en la detección de enfermedades representa un avance significativo en la agricultura de precisión. Mediante el monitoreo continuo y la deteccióntempranadeenfermedades.
• La empresa se enfoca en brindar servicios de consultoría, aprovechando la inteligencia colectiva de los robots para proporcionar información precisa y oportuna,mejorandoasílaproductividadysostenibilidaddelaindustriaagrícola.
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023 Introducción
• Analizar los modelos y arquitecturas de aprendizaje profundo destinados a procesamiento de imágenes que cuenten con soporte de cuantización para emplear un conocimiento externo y afinarlos a las condiciones específicas de un invernadero y que el robot pueda tomar decisiones localmente.
• Determinar los requisitos computacionales que el robot necesita para que permitan compilar algoritmos de aprendizaje, sus modelos desarrollados y la transferencia de modelos de datos para de esta manera garantizar la confidencialidad de la información.
• Determinar los requerimientos de cómputo del modelo de aprendizaje para integrarlo al sistema robótico sin afectar el resto de sus funciones como su planificación de rutas.
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023 Objetivos
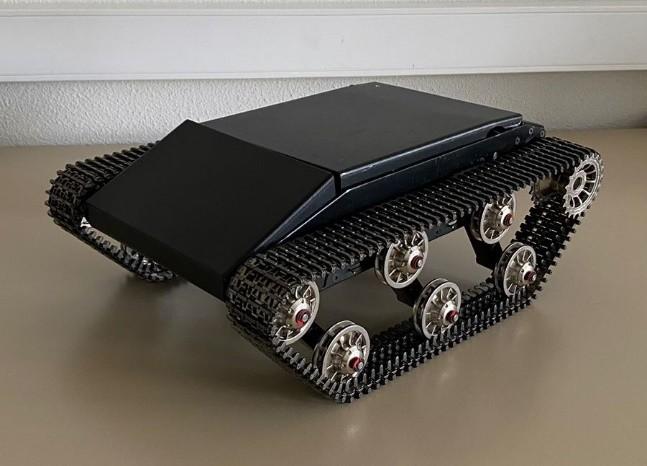
Movimiento del Robot

En cuanto al movimiento del vehículo, actualmente se implementa de forma manual mediante la inserción de rutas predefinidas en el sistema, se tiene previsto implementar un sistema de detección y generación automática de rutas.
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
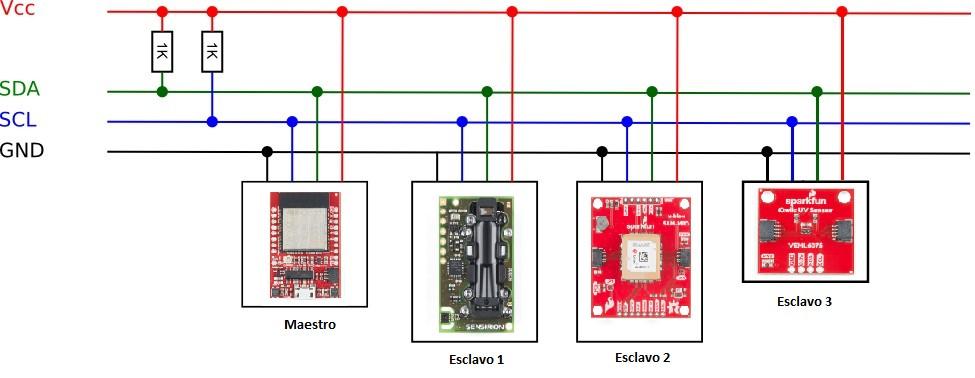
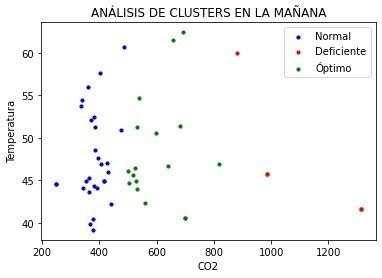
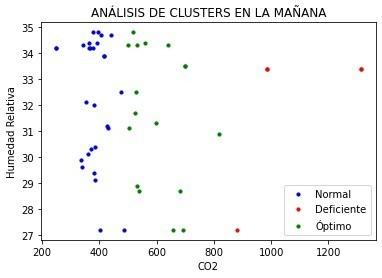
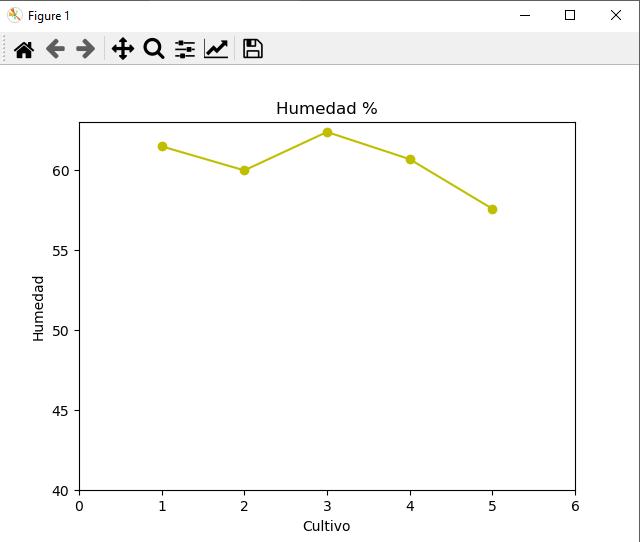
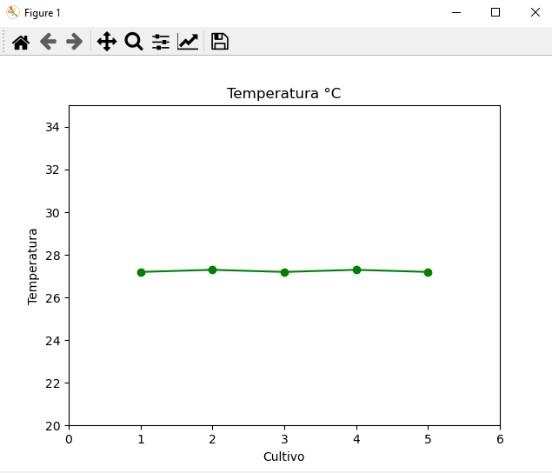
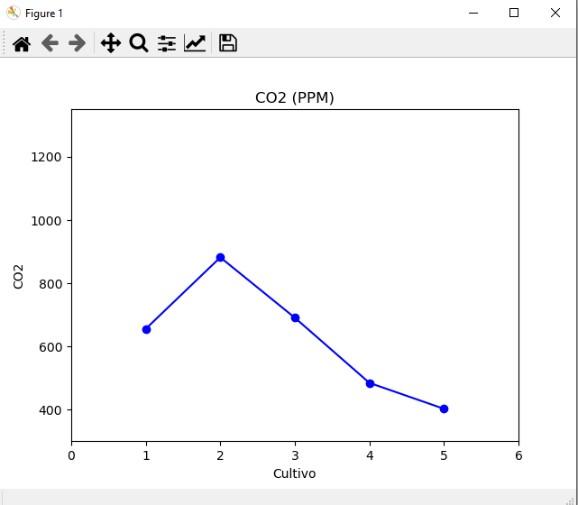
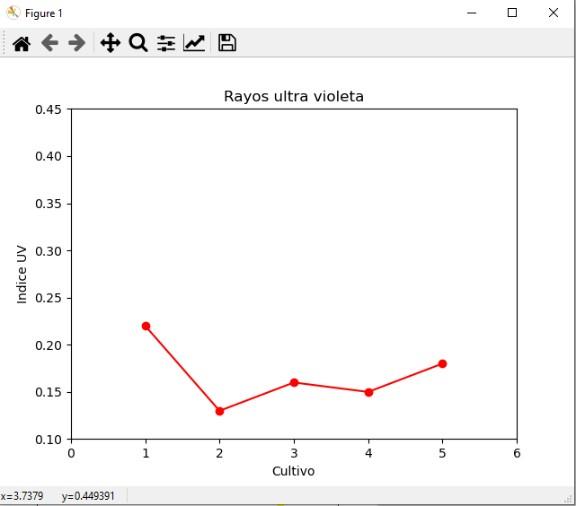
Monitoreo de variables
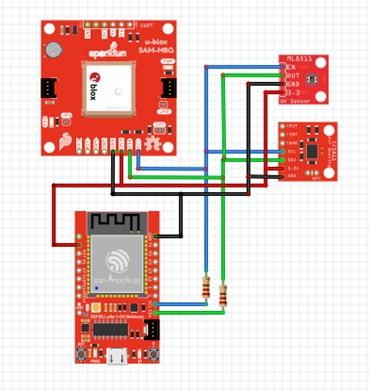
La adquisición de datos ambientales es fundamental para el monitoreo de los cultivos y se realiza a través de la utilización de sensores especializados. Estos sensores están diseñados para medir y registrar variables clave del entorno, como la temperatura, la humedad del suelo, la radiación solar y la calidad del aire.
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
Visión artificial
La detección de enfermedades en las hojas de los cultivos es fundamental para tomar medidas preventivas y correctivas a tiempo, evitando así la propagación y el deterioro de las plantas. Mediante el uso de algoritmos y técnicas de visión artificial, se busca desarrollar un sistema capaz de identificar y clasificar automáticamente los signos de enfermedad en las imágenes capturadas por la cámara.

Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
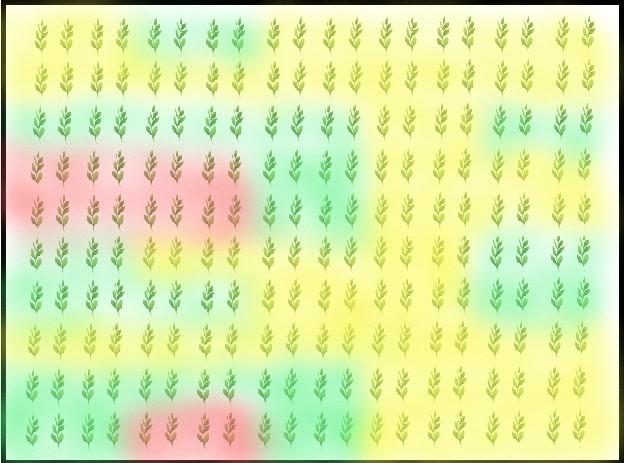
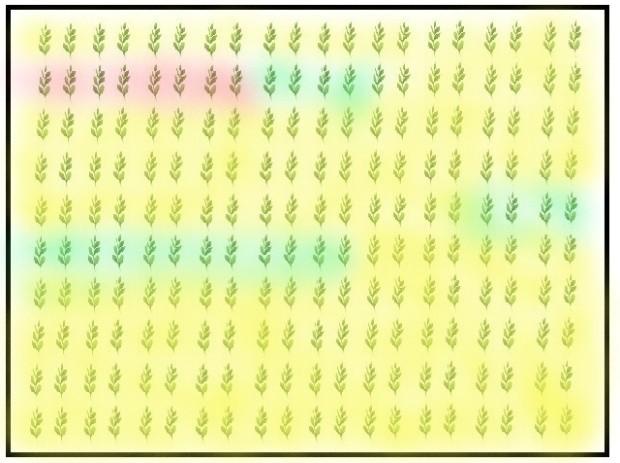
Producto final
Se cuenta con 2 productos finales, el primero es el encargado de monitorear las variables ambientales del invernadero y enviar un mapa del cultivo donde se encuentran los posibles fallos.
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
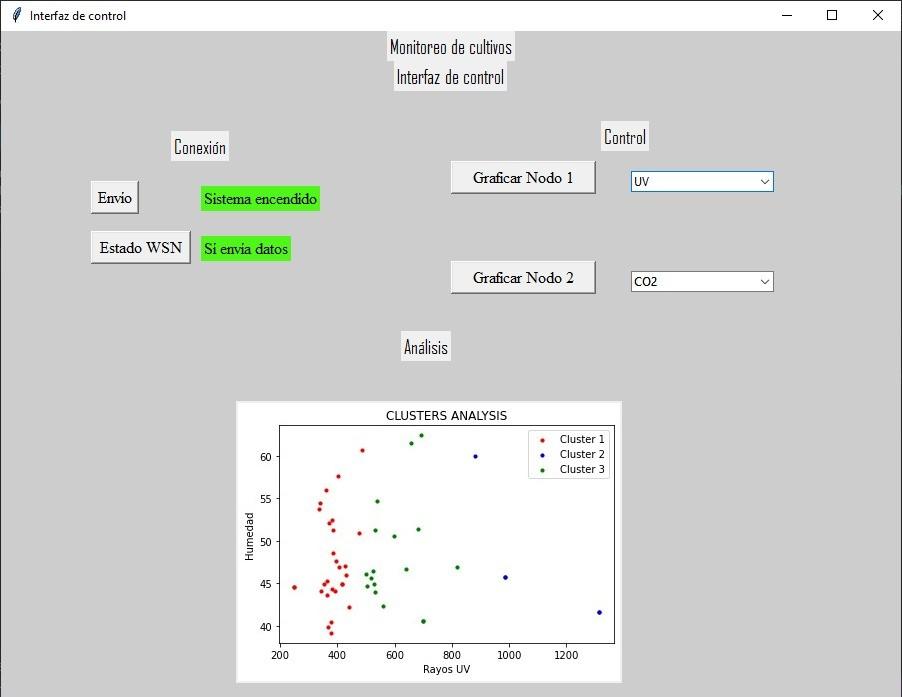
Se muestra la interfaz de control del robot y las capturas brindadas.
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
2022-2023
CURSO
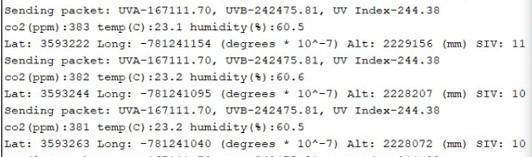
Información mostrada en pantalla
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
CURSO 2022-2023
Producto final
El segundo es el servicio premium, el cual consiste además de monitorear las variables ambientales, el análisis de las hojas para detectar enfermedades.

Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
Conclusiones
El aprendizaje federado en robots para la detección temprana de enfermedades en cultivos en invernaderos ofrece una solución prometedora para mejorar la eficiencia y precisión de la detección de enfermedades en los cultivos. Al permitir que los robots recopilen datos y realicen tareas de aprendizaje de forma distribuida, se pueden aprovechar los conocimientos colectivos sin comprometer la privacidad y seguridad de los datos.
Los robots pueden recopilar datos en tiempo real, como imágenes y mediciones de las plantas, y compartir estos datos con otros robots para realizar un análisis conjunto y mejorar la precisión del diagnóstico de enfermedades.
Al distribuir la tarea de entrenamiento entre los robots, es posible actualizar los modelos con nuevos datos sin necesidad de transferir grandes volúmenes de información a una ubicación central, lo que reduce la carga de la red y acelera el proceso de actualización.
Al detectar las enfermedades en etapas tempranas, se pueden tomar medidas preventivas y reducir el uso de productos químicos, lo que beneficia tanto al medio ambiente como a la productividad de los cultivos. Además, el aprendizaje federado permite utilizar recursos robóticos existentes de manera más eficiente, evitando la necesidad de adquirir equipos especializados costosos.
Esta actuación se encuadra en el Plan TCUE 2021-2023, y ha sido seleccionada en el marco de un programa operativo cofinanciado por el Fondo Europeo de Desarrollo Regional (FEDER) y la Junta de Castilla y León
CURSO 2022-2023
