THE NEW CRYPTO ZOOLOGY
BY CARLOS SILVEIRA

BY CARLOS SILVEIRA

Circulatory System:
Skeletal System: Gelatine
Integumentary System: Silicone / Alginate
Behavior and Communication: AI / Arduino








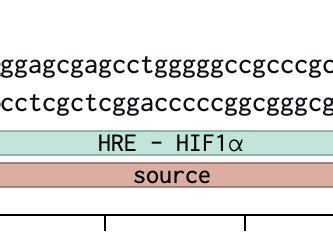
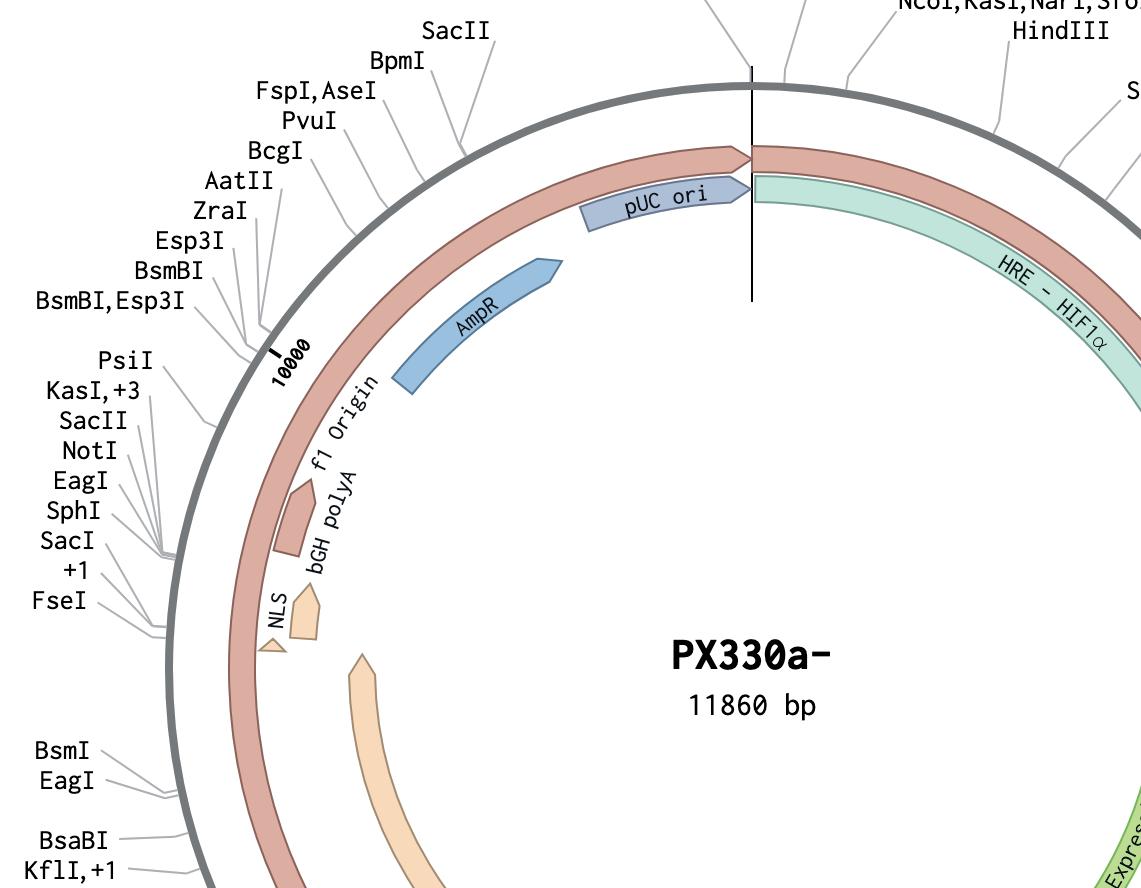

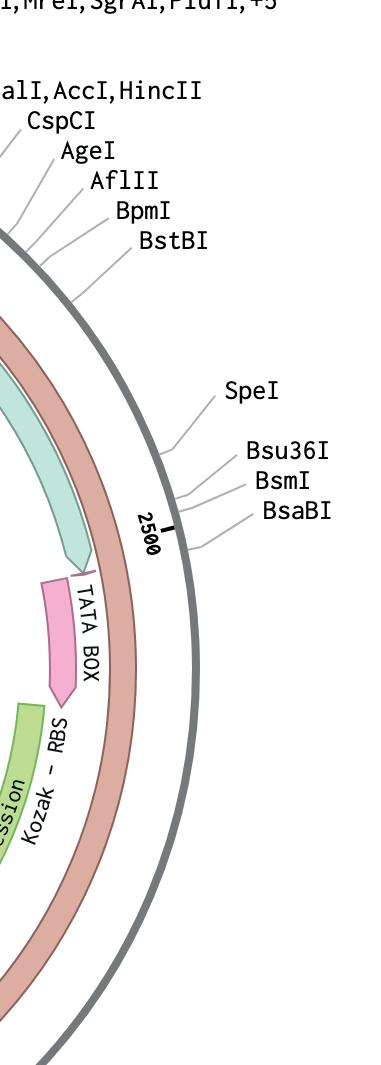

Plasmid









Besides the intervention of creating a prostheses for an injury on my muscles and other wearables without necessarily thinking about their connection between them and my body, this second intervention I aimed to create a bridge that could make the body access external objects as devices, as new muscles, organs and tissues within a post-humanist approach.
This artifact isn’t necessarily a project with a functionality that affects someone or something directly, but it gives the possibility of influencing the body and the external environment by creating a new connection between them, something that could improve patients’ lives with new post-surgery and recovery solutions,
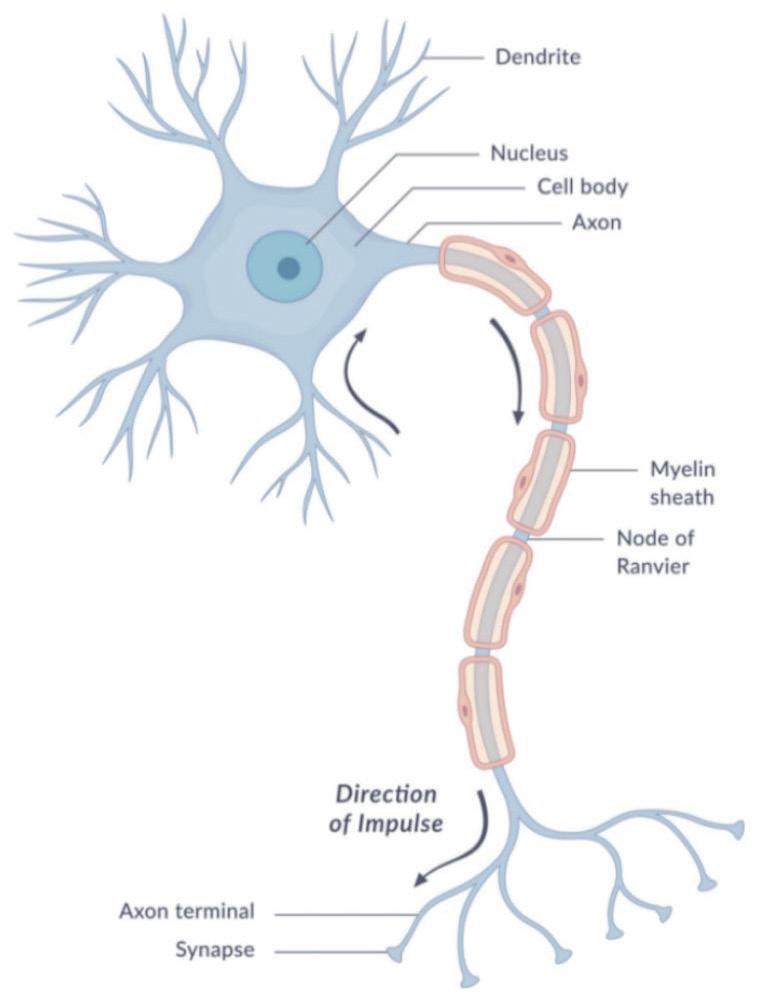
The dendrites serve as the distribution part of the neuron, resembling the roots of trees that spread in a fractal pattern, dividing each branch by half from the previous one. Their purpose is to connect one neuron to others and process signals received from associated axon terminals. Following this, the cell body is responsible for all metabolic processes, containing genetic information, maintaining neuron structure, and providing energy to drive the cell’s activity.
In sequence, the axons act as channels, conducting electric impulses away from the cell body and surrounded by a lipidrich layer called myelin, which insulates the cell and increases the speed of electric signals traveling through it. Finally, the axon terminal is a specialized region at the end of the cell body that connects, but doesn’t touch, the dendrites of other neurons or effector cells, such as muscles.
Within this logic, it’s perceivable that neurons don’t act as a structure of “comes and goes” but rather as a battery with two sides (positive and negative) with a specific
considering my deep interest in healthcare devices.
For creating a bridge that could reframe the body as a device, there wasn’t better inspiration than our neural system and how it distributes its branches inside of ourselves by using the venation/fractal pattern as a logic to create an efficient network.
Within this approach, the first step to understanding neurons was to comprehend its anatomy and how electric charges are being transmitted from one point to the other, which, according to the research explored in medical websites, seemed not so complex at first sight, considering the division of four main parts: Dendrites, Soma, Axon and Growth Cone.
structure to receive signals and another one dedicated to transmitting information along its body.
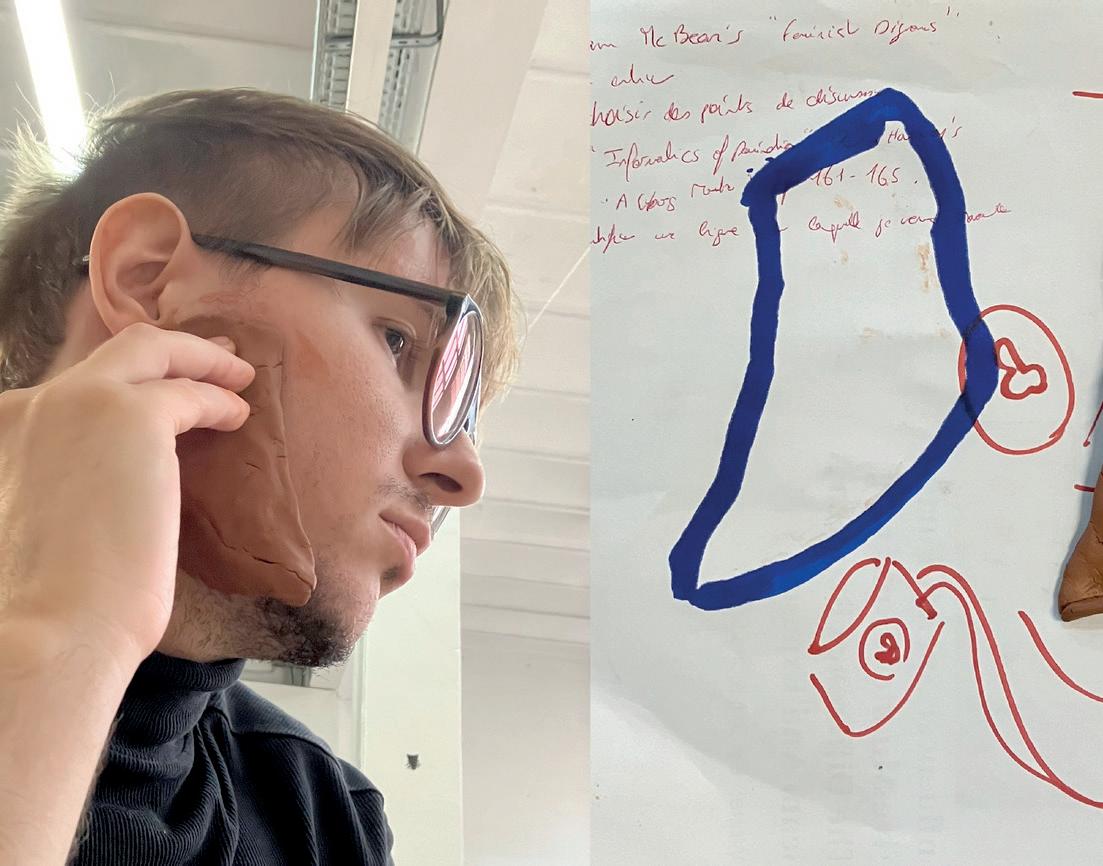
Considering the understanding of the neuron structure, it was important in sequence to understand how an external layer would behave above the body skin and how it could distributes itself, considering not only the logical aspect to the structure itself, but how I could integrate this intervention with my previous one, where I aimed to attached “external” muscules into my jaw, and how


I could extract electricity from the body to power the external nervous with my body itself. For this, I’ve made a simple prototype using folded paper stripes attached to my body and a mannequin to understand how this 2D surface shape could follow the fluid form of the body without any physical interferences as bendings and twistings.


To power up the the system at first sight, I imagine the idea of connecting the device through the levels of glicoses on my blood, however, to make this come true it would be necessary an almost parasitic system that would needed to be inserted in parts of my body to convert the electricity within my veins to an electrical current and sustain the exo-nervous-eskeleton.
As a consequence of this tricky condition, and within some research around body “power supplies”, the idea of converting heat on the body into electricity was chosen considering the easily achievable aim by using some actuators that could be attached to the device structure and my body without harm.


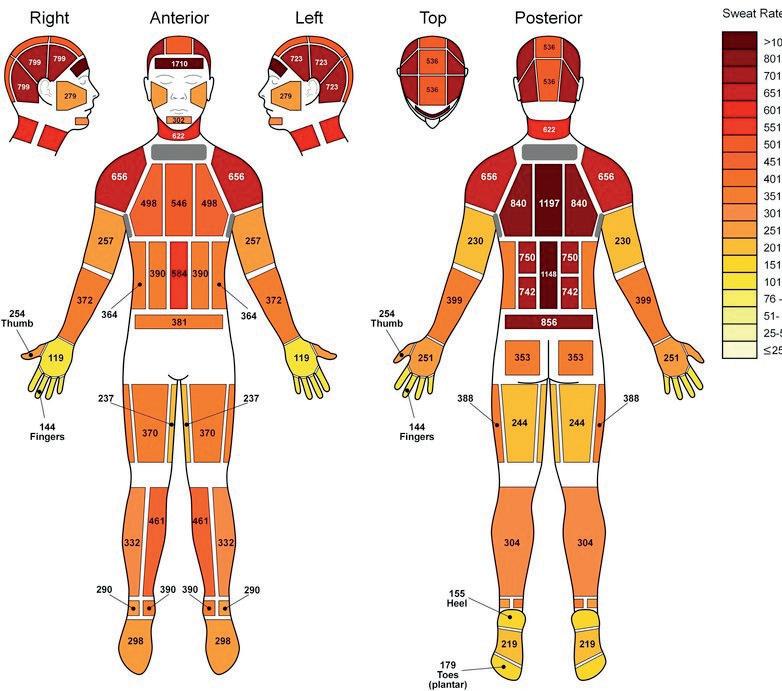
This way, it would be possible to understand where the “Cell’s body” as the neurons would be located to extract higher levels of thermal activity and then distribute them over the body to create an auto-sufficient device that could be powered by myself.
However, considering the low amount of time to deliver this intervention and achieve a certain level of the project, the next prototypes developed were focused on creating a specific pattern that would replicate the hierarchical connections between the “artificial neurons” and how they could follow the idealized patterns tested with paper folded stripes.
As a sequence, a modular structural system was developed to emulate not only the connections observed but also the different types of neurons identified in nature and how they are distributed, considering the morphology and different capabilities of spreading themselves through within a specific space as a 2D surface plan.
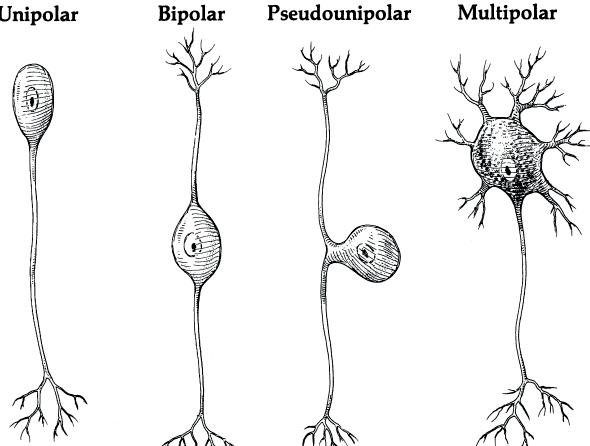
Between the morphological classification of the neurons, three specific morphologies


were chosen to distribute the electricity efficiently through the body with flexibility and modulartity: the anaxonic type, which would be used to spread the electricity from different angles; the multipolar that would create a bridge between different spots; and the pseunipolar that follow the same functionaly as the multipolar but consider the cell body as a generator of electricity, that could stimulate the production of electrical current and stabilize the distribution along the body.

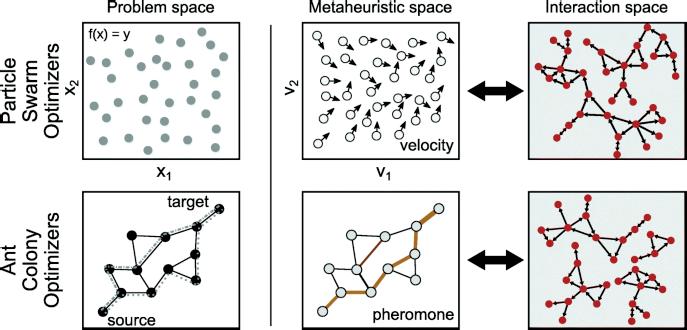
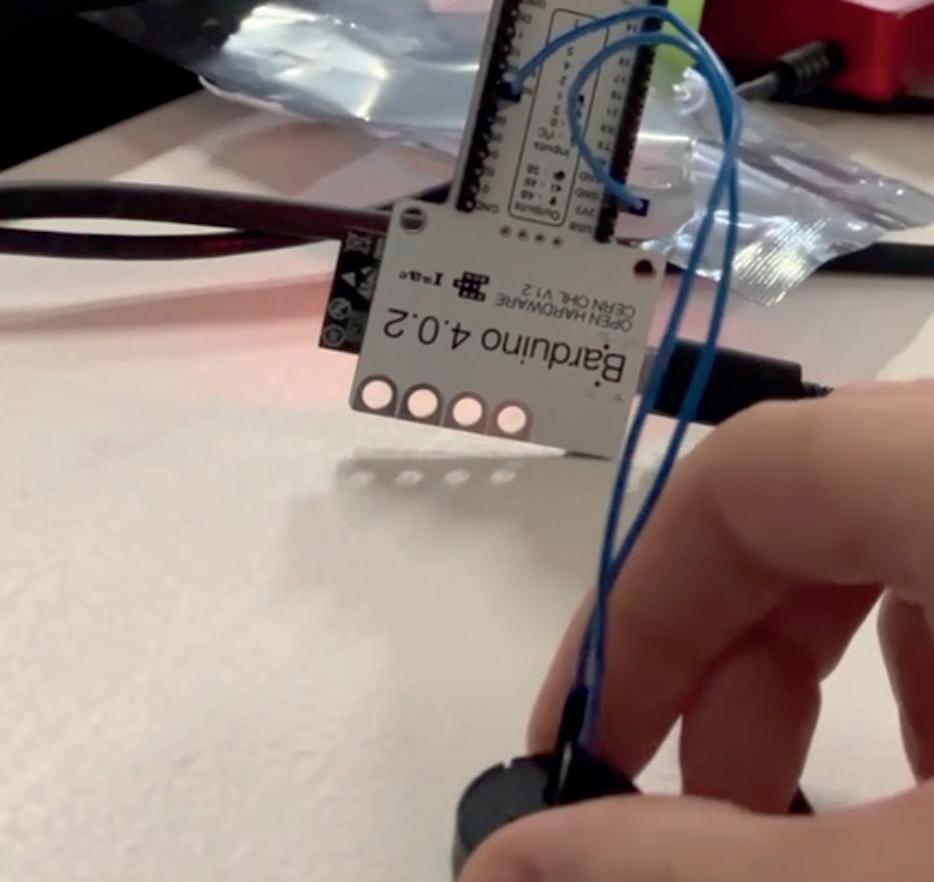
Micro Swarm is a project for the Micro Challenge Course in the Master in Design for Emergent Futures Year 1 for 2024-2025 to test ‘swarm intelligence’ using a series of Barduino (ESP32) devices. With input from a human user (vibration sensor), a note will be played on a single ‘Reference’ device. Using OpenAI, a harmonizing note will be determined and relayed to the ‘Cell’ devices via MQTT. The ‘Cell’ devices will then play the note to create ‘swarm music’.
The proposed system is composed of a single “Mother” or “Reference” device that reads input from a sensor and sends out a signal to the “Child” or “Cell” nodes to make certain
noises in response to the stimuli.
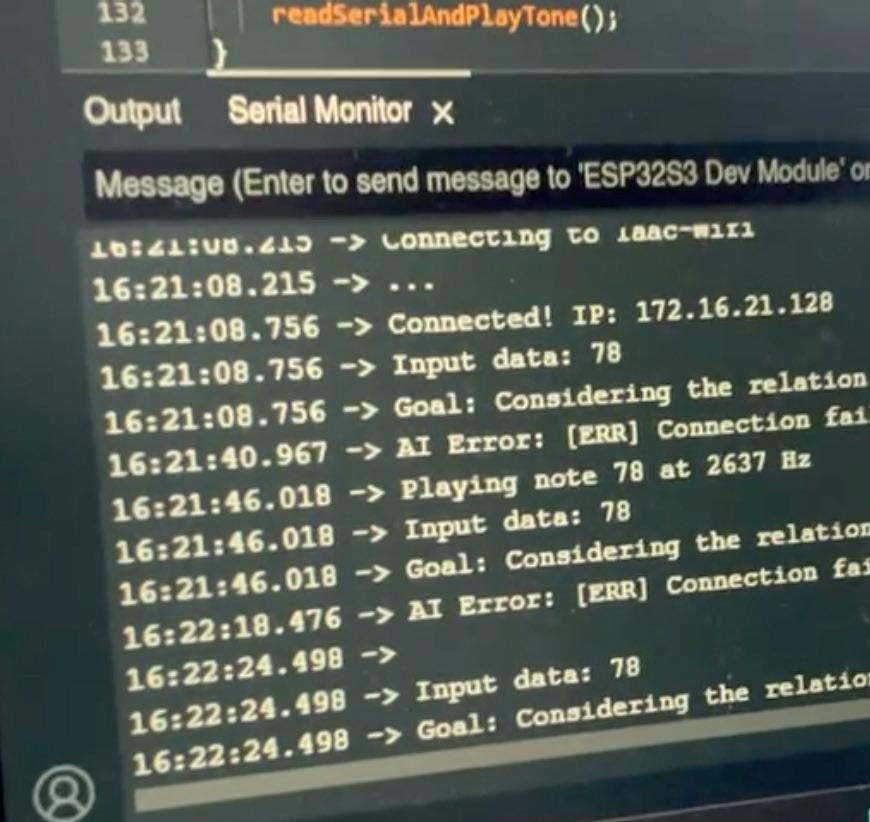
The Reference node will process the input from a sensor to determine the frequency of a note to play on the onboard piezo buzzer while simultaneously sending a query to a ChatGPT prompt through the OpenAI API to determine harmonizing frequencies for the desired note. The information of the harmonizing note is then conveyed to the Cell nodes using Message Queues Telemetry Transport (MQTT) publish-subscribe protocol on a local WiFi network through an existing MQTT broker server. When the Cells receive the frequency, they will activate the onboard buzzers to play the sound, creating the harmonious din of cicadas.



























When a predator makes a vibration close to the Mother node, the node will send out a “danger” signal so that the Children nodes are alerted. A predator’s approach is detected through a piezo vibration sensor on the Reference device. When the sensed vibration is within an acceptable range, to cut out noise from the sensor, the value is mapped to correspond to one of the indexes of 88 notes which is passed to the OpenAI prompt. The prompt requests that 3 harmonizing notes be determined from the given note and return them as an array.
The Reference node will then relay a different frequency to each of the Cells so they can respond in an individualist manner to make sure all of the children heard the call. This is done by publishing the desired frequency to a different ‘topic’ to which the Cells can each subscribe to receive only the frequency meant for their buzzer.
The code for the cells is much simpler. Each Cell subscribes to a topic and then when a new message comes in from the Reference, plug that value into the buzzer frequency and play the note.
The carapace, with an insect look, besides being designed to be adaptableemitted in its internal parts when assembling the electronic components to improve time, for mother and son, was intentionally designed to reverberate the acoustic from one chamber to the other and amplify the sound emitted by the buzzer inside of the artificial insect.
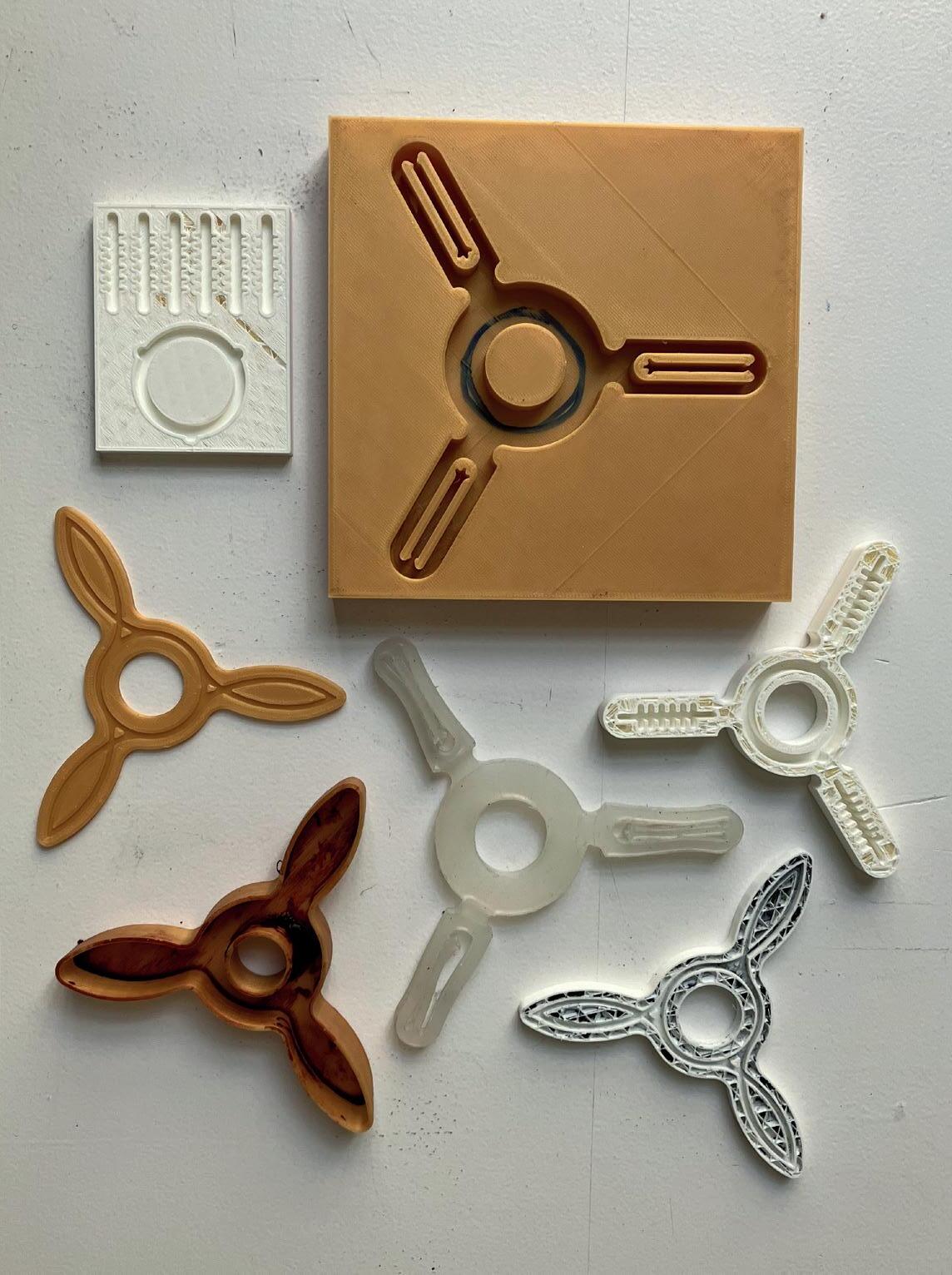
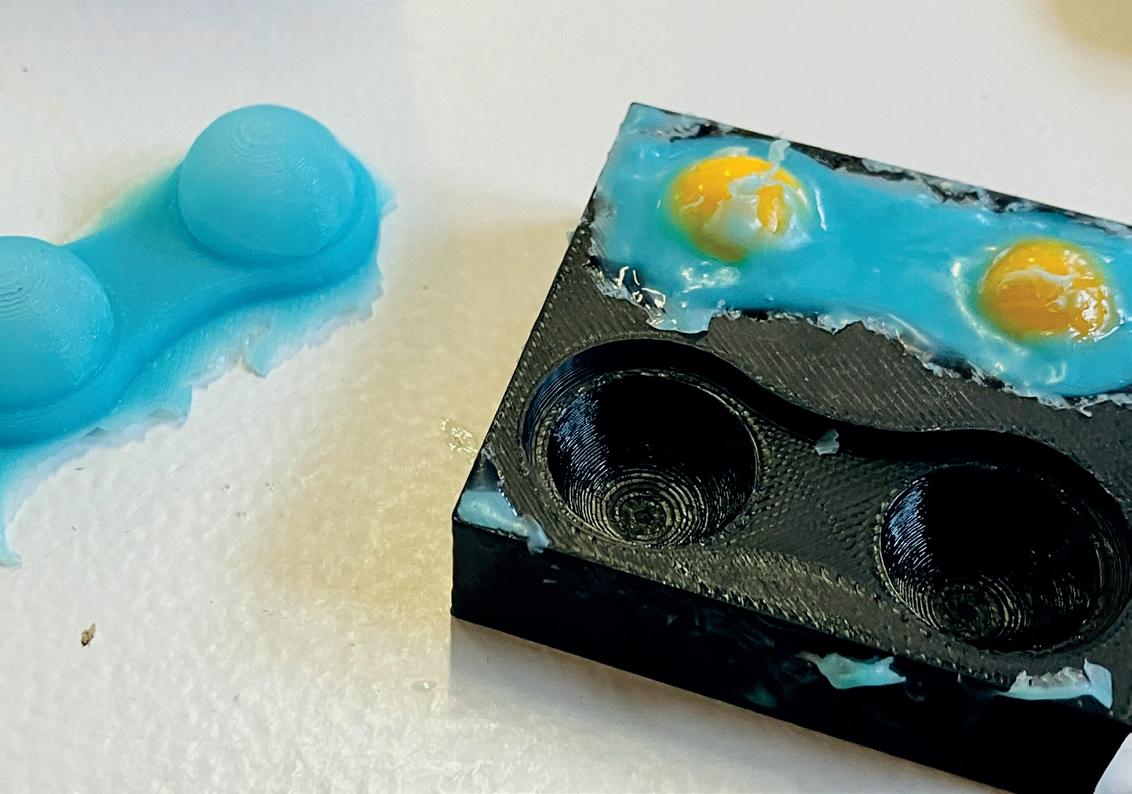
The structure of the artifact components is divided into two specific parts, a flexible silicone base with four legs that can be attached to different places vertically and horizontally with suction cups on each leg, and an external structure that covers the Barduino board, battery, and piezo sensor, 3D printed in PLA to protect the components
from the external interference and maximize the sound by using oval shapes and seven holes on top to let the airflow from the chamber to the outside.
To produce, the carapace used a a Bamboo 3D printer for the shell, a Creality Ender to print the mold for the silicone bottom layer, and Blender and Adobe Illustrator to define the shapes and forms. It’s important to enhance the several changes made during the project that transformed the original shape to a new version considering the possibilities of batteries to be used on the Barduino and they would be distributed inside of the carapace without interfering with each other, which consequently gave a more anatomical shape specifically designed to the board and components for this Micro Challenge.

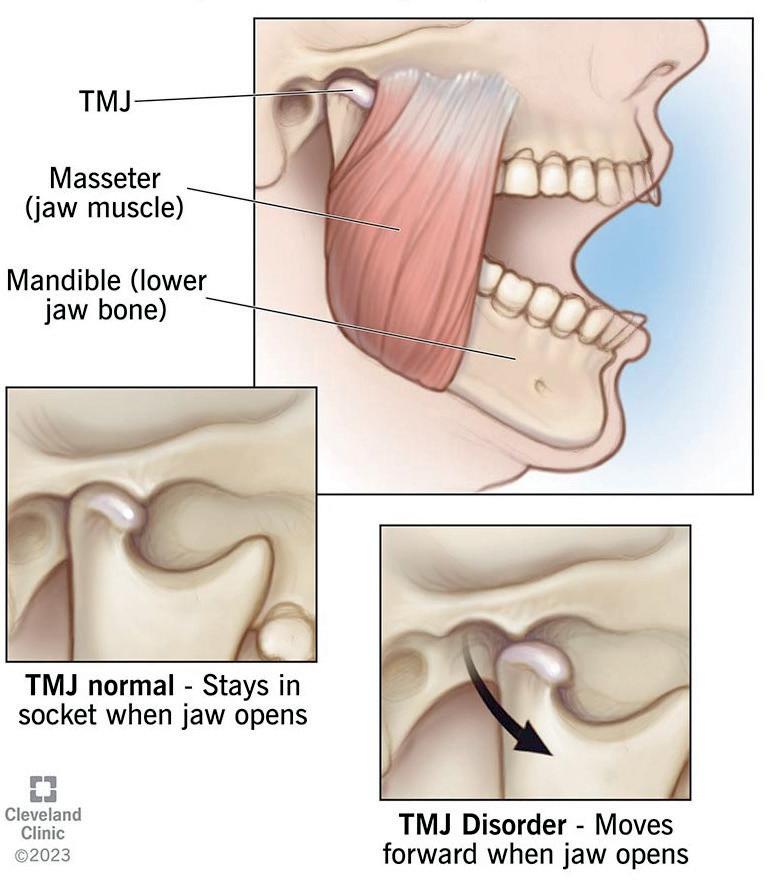
One of the possible ways to alleviate muscle pain over the centuries has been the technique to massage specific locations to relieve the inflamed pain stress, something that could potentially help me to be more aware of my body conditions, a functionality that could be implemented in my “living prosthesis” to understand the relation between the care of the patient by taking care of the object.
In addition, considering my experience over the years with my condition I know how to map which specific points would be more important for me to increase the efficiency of my prosthesis, which obviously would be located next to my TMJ, and so the subsequent muscles below the face structure that surround line the cheeks.
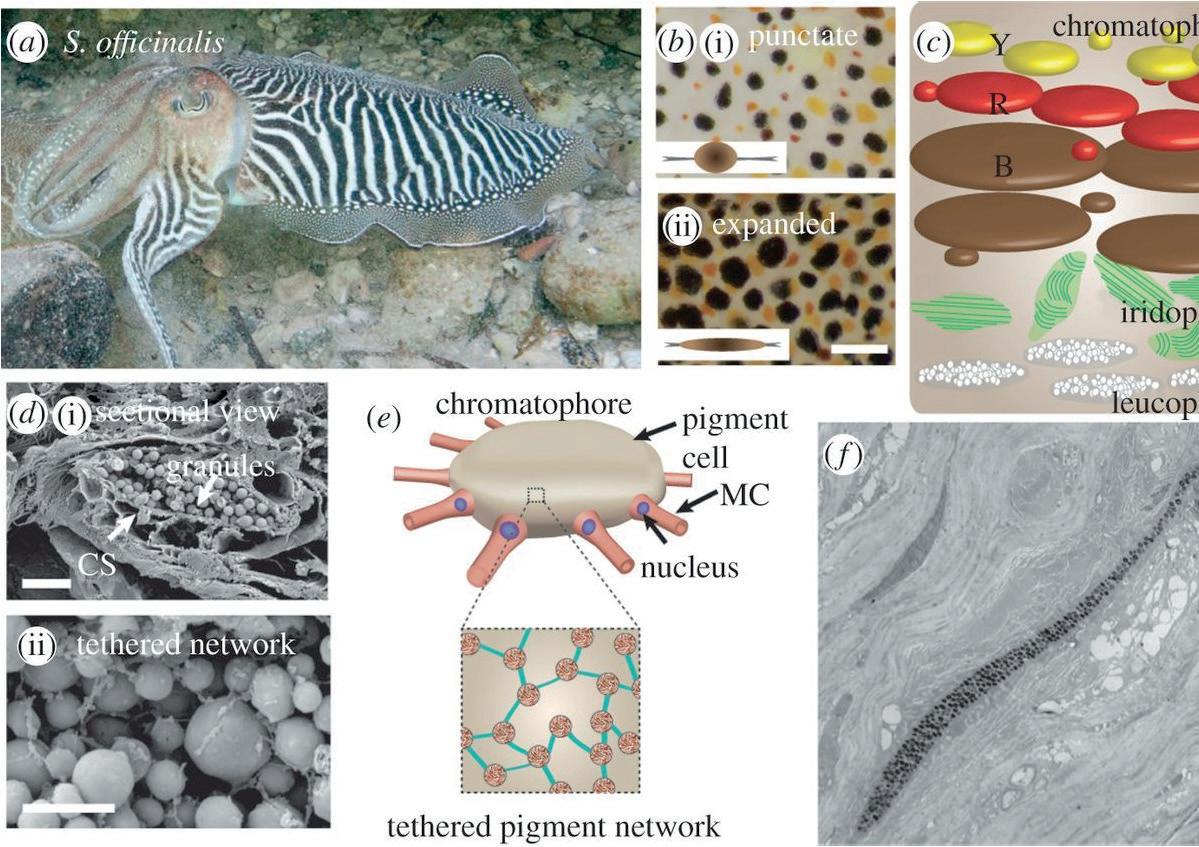
The pattern was idealized and inspired by the movement of chromatophores, a specific muscle located on squids that creates the reactions in the skin to change color physically, the idea which surrounds those tiny actuators in the body relates to the physical pressure obtained by the radial muscle fibers which compress and expand the color inside the muscle to create an illusion that the animal is changing color.
As a sequence, an old pattern developed by myself in another project that mimics this functionality was used in this intervention considering the time to accomplish the aims
and ask the right questions about using something I diagnosed.
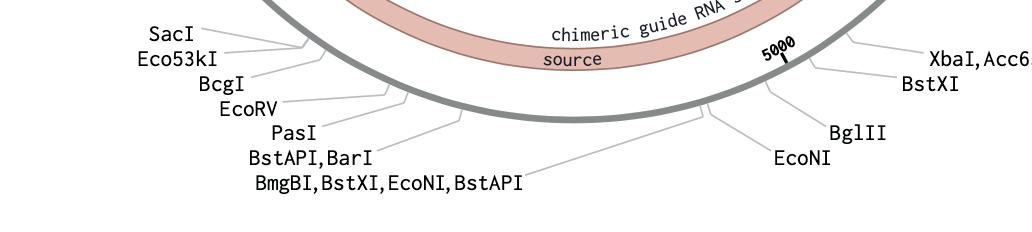
The pattern developed mimics the structure by creating distributed channels. The liquid or air passes through a distributed network until it arrives at certain specific points to inflate and create pressure against the region where most of the pain is localized. In the architecture of the shape, the stars are considered distribution channels, and the triangular ones, with more elasticity due to their geometry, have a dor at their center to inflate and create a ball of air or water to create pressure.
Differently from our medical devices and gadgets most of the time are developed to be indestructible and last as long as possible considering the patient’s health, this biocrafted tissue needs water to stay hydrated to stay in its original form, something that could be observed when observing it in the last three weeks, where in almost five hours that tissue started to get dried while reducing its size.
This gave me the insight to use silicone to test once again the pattern, however considering the toxicity of the material, my next steps are based on making the walls and connections between the tissue thicker, which can retain more water and give more stability to the prosthesis along the day, something that was tested with a simple alginate that looked like an organ with thick barriers.




The idea of this project relates to the concept of creating my own Genetically Modified Organisms (GMO) to produce/grow tissues with new functionalities that could improve Soft Robotics autonomy considering its capabilities through the environment without physical inputs. Most Soft Robotics rely on
activating physical reactions to improve movement, however, with Synthetic Biology it would be plausible to create a tissue containing biochemical sensors that could initiate the engine to stimulate physical reactions to its movements, in different contexts/environments.
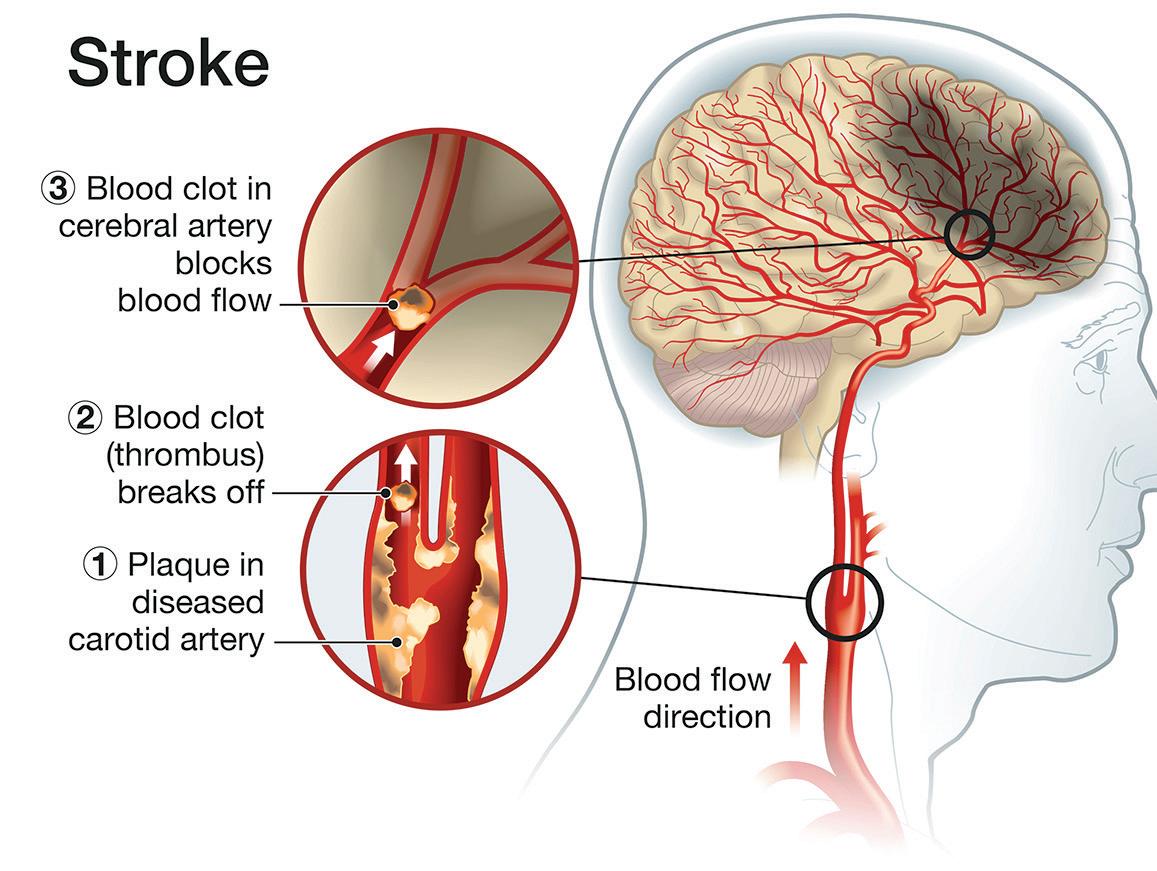
The aimed system for the project is based on a simple biochemical sensor that could react to certain chemicals produced by the body before having a complete stroke cycle, the idea envisions a prevention mechanism that could be grown within human tissues, easily accepted by the body, that could open intravascular ramifications in the brain and avoid the process that harms and causes numerous damages to the organ and consequently mental processes and sense perception.
To create the device is important to understand which kinds of chemicals can be measured
during an ischemic stroke, where a blood cot enters inside one ramification and interrupts the passage of air in certain parts causing damage and the death of a specific area unidentified before several consequences appear externally.
As a consequence, besides the physical reactions of the brain tissue, the lower levels of oxygen (Hypoxia) can indicate a disruption in the balance of Ions to a chemical reaction that a biosensor could measure to induce a reaction into the tissue where it will be applied to open the intravascular structures.
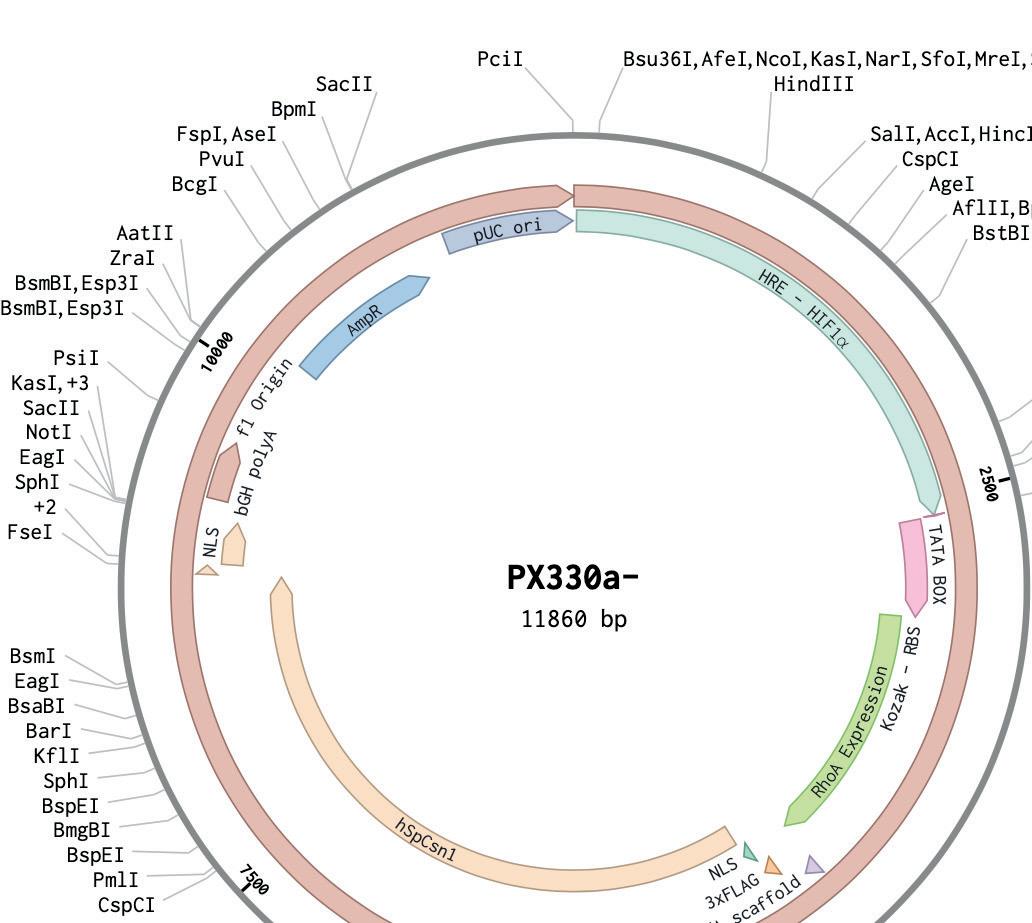
To make the project a reality, it would be important to use different technologies to synthesize the genetically modified DNA and then insert the plasmid into a Stem cell chassis that can be easily accepted by the human body with any possible risks and negative reactions. The first step would be to synthesize the DNA sequence with specific suppliers that could deliver the entire plasmid sequence already built, such as Twist Bioscience, and then initiate some PCR procedures that could replicate the sequence into more numerous quantities to start implementing the sequences into Stem Cells.
However, due to Nuria’s feedback and the possibility of working with muscle cells and not exactly the plasmid layout designed before, it would be easier to use CRISPRCas9 to genetically modify the muscle cell sequence and reprogram them by inserting the Hipoxia sensor HRE-H1f1 Alfa. However considering this possibility and the idea of replicating them, it still would be necessary the use PCR process to replicate the modified sequences and them grow in the lab. In addition, another possibility that would make this assembly easier is the Gibsom Assembly process, which can unite different fragments of DNA sequence into one isothermic reaction.
At last, the host of the designed sequence will be grown and not necessarily inserted, with both alternatives already assembled, the next important part of the process is related to the physiological form of the nano soft robot that will be inserted inside of the brain and how it will be shaped to react chemically to the levels of oxygen in on specific part of the brain and unfold itself to open space in case of ischemic strokes situations. As a consequence of the research, and confirming the morphology of our vein structure in an ocular tube shape, its would be important to consider the shape of robot before and after the reactions.
For this, it was created a Y-shaped robot with legs that unfold from the middle, which stays firstly as a circle and then opens by spreading two levels of extension, one rigid structure at the beginning and a second one with thinner legs and grips that would be attached to the
walls of veins to avoid movement considering the pressure of blood circulation it’s needed to pass through. The Y-shaped was chosen with the idea to extend as much as possible the veins and not use a lot of space to let the blood passage flow, a decision that explains the circle in the middle of the robot.
To provide movement from inside to outside, the intersection between the legs is concave in a 3D perspective, this would allow a more direct motion reaction from the robots and avoid different folding shapes during the stroke process. In addition, one thing that could facilitate the process would be the use of 4D printing techniques with bioprinters, by mixing the DNA sequences into hydrogels, but only placing the GMOs in the contortion parts, so the other parts could be grown with a more rigid structure to sustain the Y-Shaped robot inside of the brain.
To make the project a reality, it would be important to use different technologies to synthesize the genetically modified DNA and then insert the plasmid into a Stem cell chassis that can be easily accepted by the human body with any possible risks and negative reactions.
The first step would be to synthesize the DNA sequence with specific suppliers that could deliver the entire plasmid sequence already built, such as Twist Bioscience, and then initiate some PCR procedures that could replicate the sequence into more numerous quantities to start implementing the sequences into Stem Cells.