HISTORIA DE LA ROBOTICA N O V A E N T E R T A I N M E N T M I A H M O R G A N 1 0 ° B

Lahistoriadelarobótica esunaexploración fascinanteyevolutivadel serhumanoporimitar, crearydesarrollar máquinascapacesde realizartareasdemanera autónoma.Desdelos primerosintentosde seguridadhastalos complejosandroidesy sistemasinteligentesdela actualidad,larobóticaha dejadounaprofunda huellaennuestra sociedadycontinúa transformandoelmundo enelquevivimos.
Hoy en día, los robots desempeñan papeles importantes en diversas industrias, desde la fabricación y la logística hasta la atención médica y la exploración espacial. La historia de la robótica es un testimonio del ingenio y la curiosidad humana, así como de nuestra constante búsqueda por mejorar y superar nuestras propias. A medidaquelatecnologíacontinúaavanzando.
En estre trabajo se demostrara la importancia de la roboticaatravezdeeltiempo.
Introducción
Indice
¿Que es la robótica y cuáles son sus principales características?

5 Leyendas y 5 mitos relacionados a la robótica y su evolución hasta nuestros días.
Etapas de el desarrollo de la robótica:
- Etapa antigua de la robótica
- Etapa de Desarrollo Industrial
- La Robótica moderna hacia el Futurismo
Describe las Taxonomías de la robótica en:
- Cronológicas (Generaciones)
- Arquitectónicas (Tipos)
Conclusión
Webgrafía
Contraportada
Ciencia que aglutina varias ramas tecnológicas: la rama de la ingeniería mecánica, de la ingeniería electrónica y de las ciencias de la computación, ocupándose del diseño, construcción, operación, estructura, manufactura y aplicacióndelosrobots.
Energía:Elrobotdebeteneruncentrode energía, ya sea de carga o portátil, ya quesinunafuentedeenergíanopodrá realizarlastareasomovimientos.
Movimiento: Debe de contar con un sistema de movimiento, para que se pueda desplazar de ya sea de mediante coordenadas polares, cartesianasycilíndrica.
Información: Mediante los códigos de información o la programación que lleve. De esta forma es como este realizara sus actividades Puede ser tambiénmediantesensores.
Autonomía: La forma en la que el robot tienelacapacidadderealizarlatareao actividadsolicitadaporelhumano.
Para que el mecanismo del robot que se esta desarrollando o innovando tiene que cumplir con ciertas características. Algunas que ayudaran a su desarrollo y realización de actividades como físicas o virtuales que estepuedahacer.

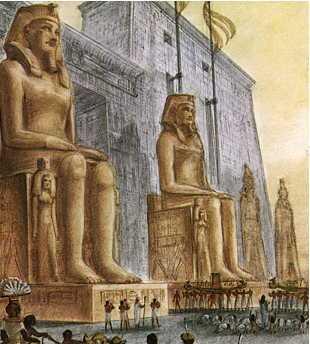
Existen registros de algunas máquinas que eran utilizadas con fines religiosos, tales como las enormes estatuas de dioses y reyes que disparaban fuego por los ojos. También se sabe que había estatuas con brazos móviles, que eran operadas por sacerdotes, e incluso algunas que emitían sonidos cuando eran tocadas por los rayos del sol. Estos dispositivos se empleaban para infundir temor en los fieles y reforzar la creencia en las deidades. Aunque las aplicaciones de estas máquinas eran principalmente religiosas, resultan impresionantes si se considera que se utilizaron en una época en la que la tecnología era muy limitada.
Los antiguos griegos llevaron la robótica a un nivel mucho más allá de su uso en rituales religiosos. Las máquinas que crearon se basaban en la energía hidráulica, lo que les permitió fabricar una amplia variedad de autómatas. Entre sus creaciones destacan estatuas con brazos móviles, aves que imitaban el vuelo, estatuas que servían vino y puertas automáticas. Herón de Alejandría, basándose en los principios de Arquímedes, escribió un libro que describía los mecanismos utilizados en estas invenciones Los antiguos egipcios realizaron avances significativos en modelos matemáticos y construyeron automatismos muy complejos, como el reloj de agua. Aunque no se sabe con certeza si fue en Babilonia o en China, se tiene constancia de la existencia del ábaco ya en el período comprendido entre el 1000 y 500 a C Durante el año 770 d.C., Yang Wu-Lien creó un autómata en forma de mono que extendía sus manos y clamaba por limosna. Este autómata también tenía la habilidad de guardar el dinero recolectado en una bolsa y detenerse automáticamente cuando alcanzaba cierto peso determinado.
En la Edad Media, hubo dos personajes relevantes en el campo de la invención. Alberto Magno (1206-1280) creó un autómata de hierro que le servía como mayordomo, el cual podía caminar, abrir puertas y comunicarse con los invitados, además de una cabeza parlante que podía predecir el futuro. Por otro lado, Al-Jazari, uno de los ingenieros más importantes de la historia, inventó un reloj con forma de elefante.
En la época medieval, surgieron varios autómatas que han quedado en la historia. Uno de los más famosos fue el hombre de hierro construido por Alberto Magno (1204-1282), que era capaz de caminar, abrir puertas y comunicarse con los invitados. También fue destacable la cabeza parlante creada por Roger Bacon (1214-1294). Además, Leonardo da Vinci (1452-1519) construyó un León Mecánico para el rey Luis XII de Francia, que abría su pecho con la garra y mostraba el escudo de armas real.
Podemos situar el inicio de esta época en la industria textil del siglo XVIII, cuando Joseph Jacquard creó en 1801 una máquina textil programable a través de tarjetas perforadas. Después, la Revolución Industrial impulsó el progreso de estas máquinas mecánicas
En la Europa de los siglos XVII y XVIII, además de los autómatas religiosos, se construyeron muñecos mecánicos muy ingeniosos que presentaban algunas características de los robots. Jacques de Vaucanson, a mediados del siglo XVIII, construyó varios músicos de tamaño humano. En 1805, Henri Maillardet creó una muñeca mecánica que podía dibujar. Este dispositivo utilizaba una serie de levas como " programa " para llevar a cabo el proceso de escritura y dibujo.
En 1938, la compañía Devilviss desarrolló el primer brazo articulado o manipulador para la pintura con aerosol, creado por H. Roselund y W. Pollard. Al año siguiente, se presentaron varios avances en robótica que captaron la atención del público. Westinghouse presentó el robot humanoide Elektro y un perro mecánico llamado Sparko
El término robot fue introducido en 1920 en una obra teatral llamada "R.U.R." o "Robots Universales de Rossum" escrita por el autor checo Karel Capek La trama de la obra era básica: el hombre crea un robot y luego el robot mata al hombre. Es importante señalar que, en aquel entonces, la inteligencia artificial estaba avanzando en paralelo con la robótica, pero no se vislumbraba aún un uso tan extenso y combinado de ambas tecnologías como el que se ve en la actualidad.
Antes de 1970, la mayoría de los robots utilizaban actuadores hidráulicos como fuente de energía. Sin embargo, en ese mismo año, el SRI desarrolló un brazo mecánico con 6 grados de libertad accionado por motores eléctricos. También en 1970, la Universidad de Stanford presentó el Stanford Cart, un robot que podía seguir visualmente líneas en el suelo de forma autónoma y que también tenía la opción de ser controlado remotamente mediante radio.
En los años previos a la década de 1990, se evidencia que los seres humanos continúan progresando en la creación de robots, pero ahora con el fin de imitar a la propia especie, dado que las máquinas destinadas a fines industriales ya están consolidadas. Es en este punto donde se da inicio a la era de la robótica moderna, encaminada hacia una visión futurista

A pesar de que se siguen desarrollando robots para usos industriales, en la actualidad se está avanzando en la combinación de la robótica con la inteligencia artificial para imitar al ser humano. En este sentido, la ingeniería mecatrónica y la carrera de robótica han cobrado gran relevancia a nivel mundial, lo que ha permitido un avance significativo en esta área. Es importante destacar que los robots modernos son cada vez más autónomos y están diseñados para realizar tareas más complejas y variadas. Además, la robótica está siendo aplicada en diversos campos, como la medicina, la exploración espacial y la educación.

En el año 2000, Honda presentó el ASIMO (Advanced Step in Innovative Mobility), un robot androide de 120 cm de altura y 43 kg de peso, que ya se encuentra disponible en el mercado (Fig. 4)27. En la actualidad, también se han creado otros robots destinados a realizar tareas de limpieza doméstica, como los plafones móviles de iRobot, que se conocen como Scooba y Roomba28, de los cuales ya se han vendido millones de unidades en Estados Unidos.
Para profundizar en esta etapa, es necesario mencionar uno de los robots más avanzados hasta la fecha, Sophia, un robot humanoide creado por la empresa Hanson Robotics con sede en Hong Kong. Sophia ha sido diseñada para adaptarse y aprender el comportamiento humano, siendo el primer robot en obtener la ciudadanía de un país. Su software permite una interacción visual con humanos y el entorno, y ha sido entrevistada públicamente por varios periodistas, manteniendo una comunicación tan natural como la de cualquier ser humano con otro.
Primera Generación: Se han diseñado robots manipuladores con el fin de eliminar el esfuerzo requerido para levantar objetos, y estos tienen aplicaciones en diversos campos. Consisten en una columnaqueestáfijaalsueloyquetieneunbrazoen voladizoqueincluyeunapinzaparasujetarobjetos,y estánequipadosconaccionamientoneumático.
Segunda Generación: Los robots de aprendizaje son aquellos que utilizan su cuerpo para adquirir habilidades cognitivas. Este proceso, denominado cognición incorporada, requiere avanzados sistemas de comunicación bidireccional entre los sensores de bajo nivel, como manos u ojos, y su procesador de alto nivel. Estos robots están equipados con sensores y hardware físico para realizar tareas humanas. Al observar la realización de una tarea humana, tratan de imitarla con movimientos similares a los del ser humano.

Tercera Generación: Los robots de control sensorizado son una clase de robots que se caracterizan por utilizar sensores para obtener información sobre su entorno y así modificar su estrategia de control. Estos robots también utilizan computadoras para ejecutar órdenes de programas que permiten al manipulador realizar los movimientos necesarios. Gracias a la información obtenida por los sensores, estos robots pueden tener un conocimiento más profundo del ambiente en el que se desenvuelven, lo que les permite adaptar su comportamiento de manera inteligente. Con esta generación de robots, surgieron los lenguajes de programación que permiten escribir los programas decontrolparaestosdispositivos.
Poliarticulados: Dentro de esta categoría se pueden hallar robots de variadas formas y disposiciones, pero su rasgo distintivo es que son esencialmente estáticos.
Móviles: Estos robots son altamente móviles y utilizan carros o plataformas para moverse, equipados con sistemas de locomoción que les permiten rodar y desplazarse con facilidad.
Androides: Estos robots tienen como objetivo imitar la apariencia y movimientos del ser humano, tanto en su totalidad como en parte. A día de hoy, los androides son dispositivos poco desarrollados y carecen de utilidad práctica.
Zoomórficos: Los robots zoomórficos se distinguen por su capacidad para moverse de manera similar a los animales. Esta categoría de robots se enfoca en imitar el comportamiento locomotor de diferentes especies animales, lo que les permite adaptarse mejor a su entorno y realizar tareas específicas de manera más eficiente. Aunque esta categoría podría incluir también a los androides, que imitan la forma humana, su principal enfoque se centra en la imitación de los movimientos de los animales.
Híbridos: Esta categoría de robots se refiere a aquellos que son difíciles de clasificar debido a que su estructura combina elementos de las categorías previamente mencionadas, ya sea mediante la combinación o yuxtaposición de características. Por ejemplo, un dispositivo con segmentos articulados y ruedas puede ser considerado tanto un robot móvil como uno zoomórfico.
1. 2. 3. 4. 5.Lahistoriadelarobóticaesunviajeapasionanteque hallevadoalahumanidadaexplorarelmundode lasmáquinasautónomas.Desdelosprimeros autómatasdelaantigüedadhastalossofisticados robotsysistemasinteligentesdelaactualidad,la robóticahaevolucionadorecientementeyhadejado unamarcaprofundaennuestrasociedad.
Alolargodelosaños,hemospresenciadoavances significativosenelcampodelarobótica,impulsados porloslogrosenlainteligenciaartificial,el aprendizajeautomático,lapercepciónyla
movilidad.Estosavanceshanllevadoalacreación derobotscadavezmásinteligentes,versátilesy capacesderealizartareascomplejasendiversos entornos.
https://www.espaciohonduras.net/robotica-ymecatronica/historia-de-la-robotica
https://www.bbva.ch/noticia/aplicaciones-yavances-de-la-robotica-actual/