

Physarum Rhapsody
Yijia Zhang
Hanjie Xie
1
00 PROJECT VISION
0.1 THE BRIEF AND THE SITE
0.2 RESEARCH DIRECTION
01.EXPERIMENT
1.1 AGENT BASED MODEL
1.2 SLIME MOLD ALGORITHM
1.3 EXPERIMENT 1 [2D PROCESS]
1.4 EXPERIMENT 2 [3D PROCESS]
1.5 GRASSHOPPER SCRIPT
02.FORM GENERATION AND STRUCTURE
2.1 FORM GENERATION AND SCRIPT TESTINGS
2.2 STRUCTURE PROTOTYPING
2.3 MATERIAL IDEAS
2.4 PROJECT PROCESS
03.SITE ANALYSIS AND SITE EXPERIMENT
3.1 CONTEXT
3.2 CYCLE TRACK NETWORK
3.3 SITE STUDY
3.4 SITE EXPERIMENT
04.PRECEDENT STUDY
05.PROPOSAL PROJECT
06. APPENDIX AND REFERENCE
2
CONTENT

3
Project Intention
Our project intends to create a new park connection that would allow people to walk and bike around the site more easily, bridging through wetlands, rivers, and high traffic.
Speculative Project Direction: Process-driven Design And The Formation Of Forms Exploration
The project speculates on the relationship between emergent processes of formation and architectural design intention, exploring the architecture that arises from this interaction. The project aims to capture architectural intents through the application of slime mold algorithms. It utilizes a series of urban planning decisions to establish a bottom-up approach, fostering self-organized design intentions. This approach represents a departure from the conventional explicit design of form, instead focusing on orchestrating intensive formation processes. By creating underlying geometric behaviors, the project enables the realization of these design intentions.
4
5
6
00. PROJECT VISION
7
Bicycle Trip Site Visit
In Sydney Olympics Park




8


In the first week, we visited Sydney Olympic Park. The first site visit gave me the impression that the park is very big and has many different and changing landscapes here. Although we visit according to an established route, it is still easy to get lost if not paying attention. Sydney Olympic Park consists of many different parts with different topography and typologies. Through the park, we can pass through the living quarters of Wentworth Point, hills dealing with pollution, rivers, and natural bird sanctuaries. We also pass through many natural areas that cannot be opened, and the connection between areas is scarce. Driving is the best way to visit the park. Walking and biking will require you to bypass some areas or get off your bicycle and walk over difficult landscapes. Still, driving could be more conducive to some of the park's animal reserves and recreational pedestrians. The ring walk in the park is impressive, a circular bridge is erected over the lake and connects the bird sanctuary to another area of the park. People can circle the bridge without getting off their bicycles, enjoy the scenery and reach the other side. Also, I remember that at the end of the trip, we had to ride our bikes on the sidewalk to dodge high-speed vehicles to return to our origin and cross the opposite side of the High Road.

9

Sydney Olympic Park is also the center connecting several residential areas, serving not only tourists but also local residents. If people can just walk through the park and reach the public transportation and restaurants they think of, this park can serve more people and act better as its bridging role.
10




11
For the vision of the project, we ask:
How to give more mobility onto the undeveloped natrual site?
How to reconnect the dispersive site condition, ie. the residential, public transportation area and the natrual site? What kind of urban planning strategy should we apply to the site, in order to build up effecient connections onto the site condition?
12
First and foremost, we need:
More walkable + "bikable" Linkage between the wetlands and rivers
Bridge through high volumn traffic
13

Brisbane is building up more bicycle tracks and bridges in the city along the river. The whole city circle is now fully accessible for bicycles and scooters. People are using the tracks to commute, exercise, and sightseeing. The tracks reconnect the city and people with activities, new views and redefine new public spaces for gathering.
14





The 32km-long track gives great experience and impression for visitors to experience and know about the city.
15


The highline project transform the original industrialized transportation facilities into a place suitable for citizens' leisure and entertainment.
The porject act as an elevated new link through spaces and a new park for gathering.
16


17
Highline, Manhattan
Goodline, Sydney


Borrowing the wisdom of nature, we decide to study slime mold networking behavior to reconnect spaces of the site. By using the output of experiments and algorithmic simulation, we will have a optimal and efficient network for the design of our project.
18

Tokyo Metro Experiments:
The University of Tokyo once conducted an experiment, they used Slime mold's favorite food, oatmeal, and arranged the oatmeal grains one by one according to the layout of Tokyo’s urban circle. Each grain represented a small city and placed a slime mold on the representative. At the Tokyo location, the slime mold expanded outwards from the beginning, trying to find all the oatmeal colleagues in the experimental dish to recover some useless tentacles, and finally built a nutrient transmission network. After years of diligence and trial and error, the Tokyo transportation system was built. The researchers took a closer look. There are differences. The design of slime mold is more reasonable and efficient.
19

Maze Experiment:
Scientists have also let slime molds walk a maze, and the same slime molds still find the most efficient path. Their strategy is actually very simple, that is, to list all the routes together, and then delete the less efficient or unreasonable parts. Using this humble slime mold method, the algorithm will be used to build our project.
20
21






fabrication
22
Material and
precedent Neri Oxman - 3d print chitosan, shrimp shell, plant derivative


Material and fabrication precedent
23
Roland Snooks - Printed sacrificial formwork and carbon infusion
Frei Otto


REFERENCE: PARAMETRIC URBAN MODELS, JOÃO V. LOPES, ALEXANDRA C. PAIO, JOSÉ P. SOUSA, 2014
The Minimal Path system is a 2015 Pritzker Architecture Prize winner, architect, and structural engineer Frei Otto who just passed away in the early 1990s, proposed a simulation system to optimize path length. Frei Otto is very good at using the properties of various materials to study some natural structures and conduct artificial simulations. He believes that matter has the power of selforganizing, which can help people get relatively optimized solutions. For example, in the experiment of Occupation with simultaneous distancing and attracting forces, he used the joint adsorption force of polystyrene chips and the repulsion between the magnetic needles to form a steady state in water to simulate the formation of matter under the action of attraction and repulsion. The initially messy distribution of polystyrene chips is finally uniformly adsorbed on the nearest magnetic needle. The magnetic needles maintain a certain distance due to mutual repulsion, forming an approximate hexagonal grid.
24
Zaha Hadid


REFERENCE: ZAHA HADID ARCHITECTS, 2006

In 2006, Zaha used Maya's hair dynamics simulation to create a shortest-path network and apply it to the Kartal-Pendik master plan in Istanbul. The new city-within-a-city will include a central business district, high-end residential development, cultural facilities including a concert hall, museum, theatre, and a new marina and resort hotel. Similar to the slime mold algorithm, the wool-thread algorithm finds the total value of the shortest path connecting cities. Wet wools are adsorbed to each other due to the tension of water, forming a transition from multiple paths to one path. This experiment aims to reduce the total length of the direct path for each destination point while keeping the winding factor in a relatively low range. The wool and slime mold algorithms are simulated with a perfect mathematical idea. Because of different influencing factors, different results will be obtained in the end, but the common goal of these results is to optimize the total length of the path.
25

EXPERIMENT

01.EXPERIMENT EXPERIMENT
1.1 Agent Based Model
Dark Matter

Human Nerve Cells

City Network




Slime mold serves as an exemplary agent-based model, defined as a computational tool for simulating the behaviors and interactions of autonomous agents, whether individual or in groups, in order to gain insights into system behavior. Our existence is governed by cosmic laws, characterized by shared principles of growth. For instance, diverse creatures exhibit similar metabolic rates and body mass ratios. Remarkably, various phenomena exhibit analogous connectivity patterns to slime mold, spanning micro and macro scales, including urban growth, brain nerve development, dark matter, trees, leaves, and internet networks. Thus, our objective was to devise a structure capable of simulating a network with similar characteristics to this universe, enabling organic growth and self-regulation.

28 EXPERIMENT
Internet Connection
Slime Mold
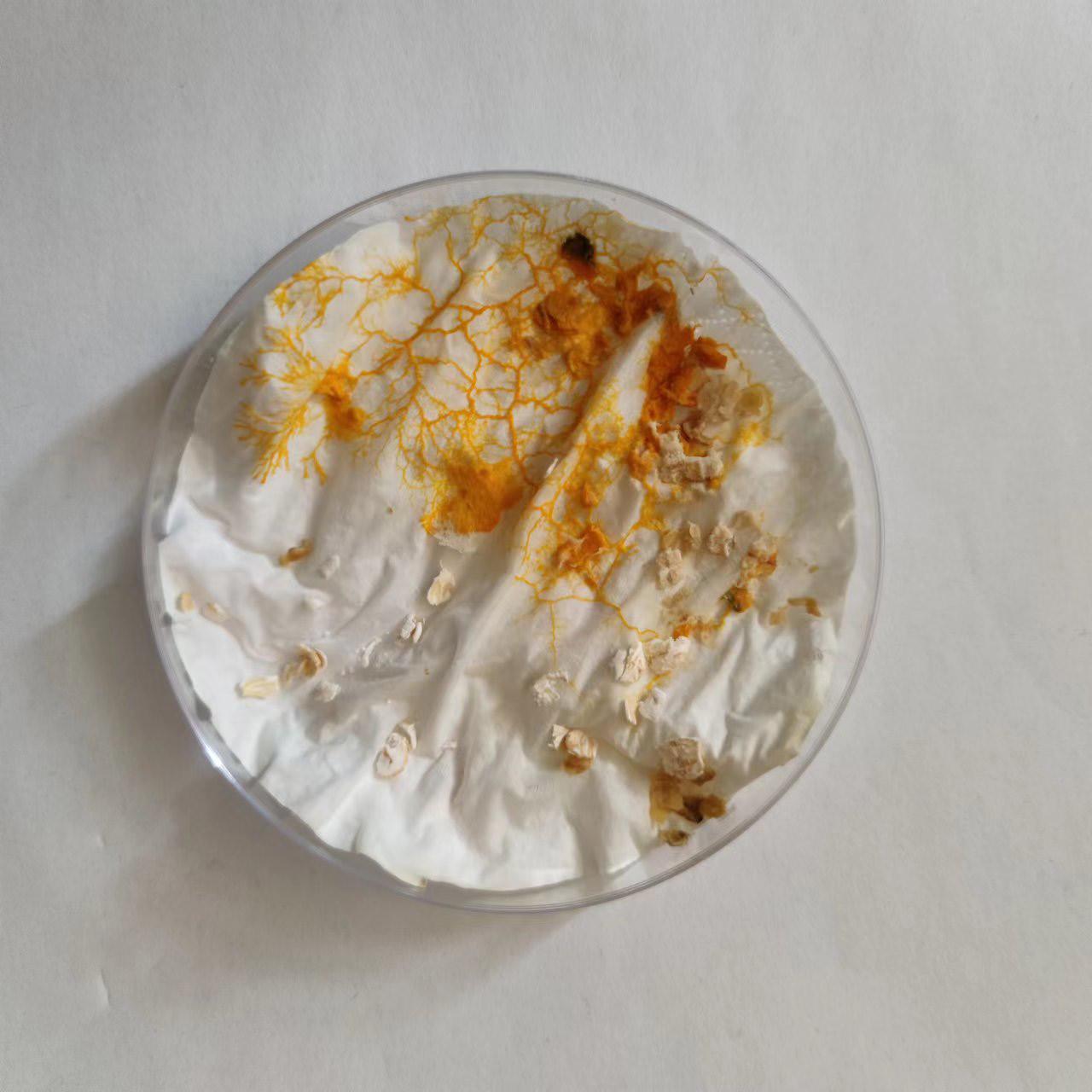
1.2 Slime Mold





The most basic elements for the growth of Slime mold are food, water, sunlight, air, light, and space. Slime molds are a group of mold-like creatures that emit tentacles in search of food, automatically forming the most energy-efficient path. The principle is that if a tentacle cannot find food after long-distance travel (negative feedback), it will automatically die to save energy. Slime mold calculates the optimal path through trial and error. Using slime mold to simulate a rail network yields the most efficient network.
To comprehensively analyze the growth pattern, we employed image analysis software to quantify the number of branches and intersections in the network. Our findings demonstrated a notable level of self-organization within the slime mold, as the network efficiently optimized the distribution of resources throughout the vessel. Furthermore, we made an intriguing observation: the slime mold displayed a preference for specific regions on the surface of the oats and agar. It exhibited greater growth in areas with higher nutrient concentration, indicating its ability to sense and respond to chemical signals in its environment, effectively adapting its growth patterns accordingly.
29
Seed
Food
EXPERIMENT
Slime mold avoiding mould
Slime mold behavior - short cut tracing and covering
Slime mold connects the closest food then grow bigger to reach further food
1.3 Experiment 1 [2d Process]
01.Slime Mold Growing Process
Nutrient sites
Nutrient sites, biased forageing domain

Mono Angent
We studied the process of slime mold growth, how they refine the pathway, and the angle of the tentacles. They will have different tentacle orientations, when these tentacles find food, they start to grow.
Foraging logic: nosie and force vection summation ( One Agent)

Multi Angents
Biased noisy foraging over time (Many Agents)

Angent Trail
Biased mesh from forager cells to refine net work

30
EXPERIMENT
1.3 Experiment 1 [2d Process]
02.Network Analysis
During the growth process, the node of the seed where the slime mold grows has always been the point with the most connection path possibilities (Highest Degree Node). In this experiment, we took a closer look at their connection order. One-line contact usually starts with the seed. Then, close food spots make connections between each other. Finally, far-apart food spots are connected to each other.
Generate Mycelium With Random Points

Seed Point
Food Point

Proximity Coefficient

31 EXPERIMENT P=1 P=2 P=3 P=4
1.3 Experiment 1 [2d Process]
03.Single Type Experiment
Even the slime mold grows naturally it also takes a different form each time
Repeat = Numbers of Repeat Experiment
repeat=1
repeat=2
repeat=4
repeat=7
repeat=5
repeat=3

repeat=6
repeat=8
repeat=9
32
EXPERIMENT
1.3 Experiment 1 [2d Process]
04.Number of Points
The more food points, the harder it is to connect all the points
P=Number of Food Points

33 EXPERIMENT
P=1 P=2 P=3 P=4 P=5 P=6 P=7 P=8 P=9
1.4 Experiment 2 [3d Process]
01.Network Path Experiment
SP= Seed Points Number
SR= Seed Points Random Index
FP= Food Points Number
FR= Food Points Radom Index



SP= 1 SR= Center
1
= 10
SP= 2
SR= 10 FP= 3
= 30
DM=Division Max
DDM=Death Max
DD=Death Distance
TS=Trial Setting


SP= 1
SR= Center
2
= 20
SP= 3 SR= 30
5
= 50

SP= 2 SR= 20
4
= 40
SP= 3
40
6
= 60
34
FP=
R
DM=10 DD=100 TS=0.2
R
DM=10 DD=100 TS=0.2
DM=10
TS=0.2
FP=
R
DD=100
R
DM=10 DD=100 TS=0.2
FP=
R
DM=10 DD=100 TS=0.2
FP=
SR=
FP=
R
DM=10 DD=100 TS=0.2
EXPERIMENT
1.4 Experiment 2 [3d Process]
02. Form Finding
After the exploration of the above experiments, we added more parameters, such as tentacle angle, division, slime mold decay rate, and division and food semiochemical concentrations rate. After randomly adjusting the parameters, we get the following diagrams.



SP= 1
SR= 10
FP= 4
R = 10
DM=1
DD=100
DDM=100
TS=0.1

SP= 1
SR= 35
FP= 8
R = 30
DM=20
DDM=10
DD=10
TS=0.5

SP= 3
SR= 50
FP= 6
R = 50
DM=10
DDM=100
DD=100
TS=0.1
SP= 4
SR= 20
FP= 3
R = 40
DM=80
DDM=1000
DD=1
TS=1
SP= 1
SR= Center
FP= 10
R = 80
DM=1000
DDM=1000
DD=10
TS=1

SP= 3
SR= 40
FP= 6
R = 60
DM=10
DD=100
TS=0.2
35
EXPERIMENT
1.5 Grasshopper Script
1.5.1 Phase 1 - Physarealm Simulation
Bridge

36
Outline
Inner Space
Root Food Points
Shape
Bridge
Bridge
Network
Cntrolling
EXPERIMENT
PHYSAREALM CORE

37
EXPERIMENT
1.5 Grasshopper Script

1.5.2 Phase 2 - Trail Optimization
38
EXPERIMENT

1.5.3 Phase 2 - Form Generation
39
EXPERIMENT
40
41 02.FORM GENERATION AND STRUCTURE
2.1 FORM FINDING
1. Specifying the size of the growing space.Setting the point of slime mold seed.

2. Setting up obstacles, in the concept of bridge, it is a space for pedestrians.
3. Setting the location of the food the space and let the slime mold automatically searching for food.


42
1.Emitter 2.
3.Looking for food
Setting obstacles
4. In the process of slime mold looking for food, a large number of tentacles are formed
4.Finding food


food
food in start food.
2.1 FORM FINDING
5. Agent trail
6.Optimizing trail
7.Trail structure line
44
5. Recording the trajectory of the slime mold and form a trail line.
6. Using an calculation to simplify slime mold trail line.
7. Extract the structure lines of the shape of the slime mold according optmized trail.


line 8.Final
the final according to the
form
8. Using structure lines to generate adhesive tensile slime mold-like structures.
2.2 STRUCTURE DETAIL

The experiment uses the slime mold algorithm to form an adherent slime mold structure to form an optimized material saving and robust biomimetic structure.
This structure apply with carbon fiber reinforced polymer material with on site 3D printing set up, with reinforced rebar as secondary structure.
46

47
2.3 MATERIAL
Carbon Fiber-Reinforced Polymer (CFRP)
CFRP is a new technology material with strength close to steel and weight similar to plastic. "Carbon fiber reinforced polymers have a specific strength that is almost 2.6 times greater than the strongest steel (maraging steel) and almost 3.6 times the specific strength of aluminum 7075-T6." CFRP has high fatigue strength per unit of weight, thus helping to improve safety, fuel economy, and durability. Emerging applications of CFRPs include medical devices, submarine and marine applications, offshore oil and gas pipelines, electric power transmission lines, the rail industry, and new bridge structures. CFRP would be a good choice for rainwater harvesting and flood buffer structures due to its high corrosion resistance.
cfrp recycle process
PLASTIC WASTE

CARBON FIBER WASTE

RECYCLED PLASTIC
RECYCLED CARBON FIBER



CFRP 3D PRINT MATERIAL
CFRP is a new type of recyclable material that is expected to reach the same mature and fast recycle industry as steel and aluminum in the future. Although the cost is higher than metals per kg, but it has higher density and recent advances in composites are helping CFRP to be more competitive and cost effective. Due to it's durability, it provides a sizable cost benifit in operation and maintenance cost. With mature recycle process, large volume of production and advanced production technology and software, the industrial level carbon fiber raw materials available at $13.8/kg by 2017 with reducing 15%30% by 2020 and going to get cheaper in the future.


While CFRP has extreme corrosion and fatigue resistance, carbon fiber can cause galvanic corrosion when attached to aluminum or mild steel rather than stainless steel or titanium. Adding a coating to the surface prevents this, making the material live longer. Oxidized coating technology is applied to the material surface to make the materials have better environmental adaptability.
48
2.4 SET UP PROCESS
3d Printing Process










The entire structure will be 3D printed on-site. The entire printed structure remains hollow for easy printing and material savings. CFRP's specific strength help to support hollow 3D-printed structures. Because the CBRP structure is stable and not easy to change, the structure can be maintained for a long time and re-enter a new round of recycling at the end of life, with the sustainability of material production, bridge construction, and maintenance. The bionic structure uses the slime mold algorithm to achieve a materialsaving stable structure. The entire structure has timeless characteristics and changeable diverse spaces, providing a flexible and durable wormhole space for different people and creatures.
49