Design in Evolution
Cyberpunk embodies many people's fantasies about future lifestyle and design. However, its core lies in the concept of "high tech, low life." This realization emphasises the relationship between technology and life, highlighting the potential for design to balance the two. Inspired by cyberpunk and interactive design, I tend to blur the distinction between living organisms and machines, approaching architecture and installation design from a deconstructive perspective.
Evolutionary theory profoundly influences my design approach. Humanity's development has relied not on genetic superiority over other species, but on culture and technology. Viewing technology as a part of human evolution, I see machines and humans as systems of varying complexity, capable of being equated and analyzed as a whole. Today, intelligent terminals are acting as extensions of our bodies and intelligence, and I understand my design works the same way. Furthermore, machines can evolve while interacting with humans, which is what I strive to achieve in my works.
PROFESSIONAL
Moduar Sculptures: Activating Retail Spaces
Interactive Kinetic Sculptures: Futuristic Aesthetics 03 HAVE WE MET?
Interactive Installation: Isaac the Curious Robot
01 MUTABLE FUTURES TOUR
Moduar Sculptures: Activating Retail Spaces
Client: H&M, Alshaya Group
Design & Production: Hirsch & Mann, Jailmake
Contribution: 3D Parametric Modelling, Budget Evaluation, On Site Installing
Location: Dubai, Kuwait City, Abu Dhabi, Riyadh, Jeddah, Doha, Cairo
2023-2024


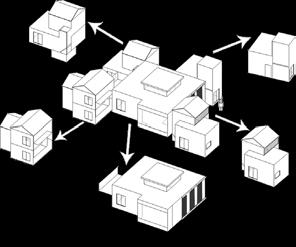
"Mutable Futures" is a project I participated as a designer of Hirsch & Mann. It involved creating modular sculptures for H&M, starting with their Barcelona flagship store and expanding to multiple locations in the Middle East for the 2024 Ramadan period.

Featuring hundreds of vacuum-metallised reflective shards and programmable LED panels, the sculptures are designed for reuse and easy transportation. The modularity allows for different configurations and scales, fitting various retail spaces. The focus on sustainability and high-quality materials ensures longevity and adaptability, aligning with H&M's mission.
Our collaboration with Jailmake ensured precision in design engineering, production, and installation, bringing these innovative sculptures to life across multiple regions.


02 PROTOTYPE SERIES
Interactive Kinetic Sculptures: Futuristic Aesthetics
Artist: 00 Zhang
Contribution: 3D Modelling, Mechanical Engineering, On Site Installing
Location: Zabludowicz Collection, The Split Gallery 2022-2024
I had the pleasure of collaborating with 00 Zhang on her innovative installations, where I contributed to the mechanical engineering aspects. These works blend futuristic aesthetics with mechanical systems, creating immersive experiences that challenge the boundaries between physical and digital realms. These collaborations were showcased at prominent venues, including the Zabludowicz Collection and The Split Gallery.



The Prototype series is a world-building practice that consists of a sequencing of works that 00 Zhang has brought together to tell a larger story. Their evolution is realised across sculpture, installation, CGI and the interactive gaming work titled The Overture of The Prototype Series.
PROTOTYPE 0028 EMBRYO


In this installation, we transformed a pristine white space into an interactive portal, featuring a giant AI-tracked eye that follows players' movements. There is also a digital version of this piece in the artist's gaming work, evoking the liminal spaces in game environments and serving as a transition between levels.
PROTOTYPE 0030 ITERATION
We created a kinetic butterfly gently flapping its wings on an LED panel. It explores the connection between the artist and the LED, creating a sensory experience that merges memory and physical space.
PROTOTYPE 0033 INVERSION
The work initiates a self-sustaining system where the artist's blood circulates as a metaphor for its power source. By extracting and externalizing the blood from the artist's body, it becomes a post-materialistic expression, reflecting the body and self through the machine.
Prototype 0033 Inversion
03 HAVE WE MET?
Interactive Installation: Isaac the Curious Robot
Project Film: https://vimeo.com/791193270
Design Thesis Film: https://vimeo.com/791194353
Instructor: Parker Heyl, Stephen Gage, Ruairi Glynn
Collaborate: Adam Ray Braun
Duration: 10 Months
2022

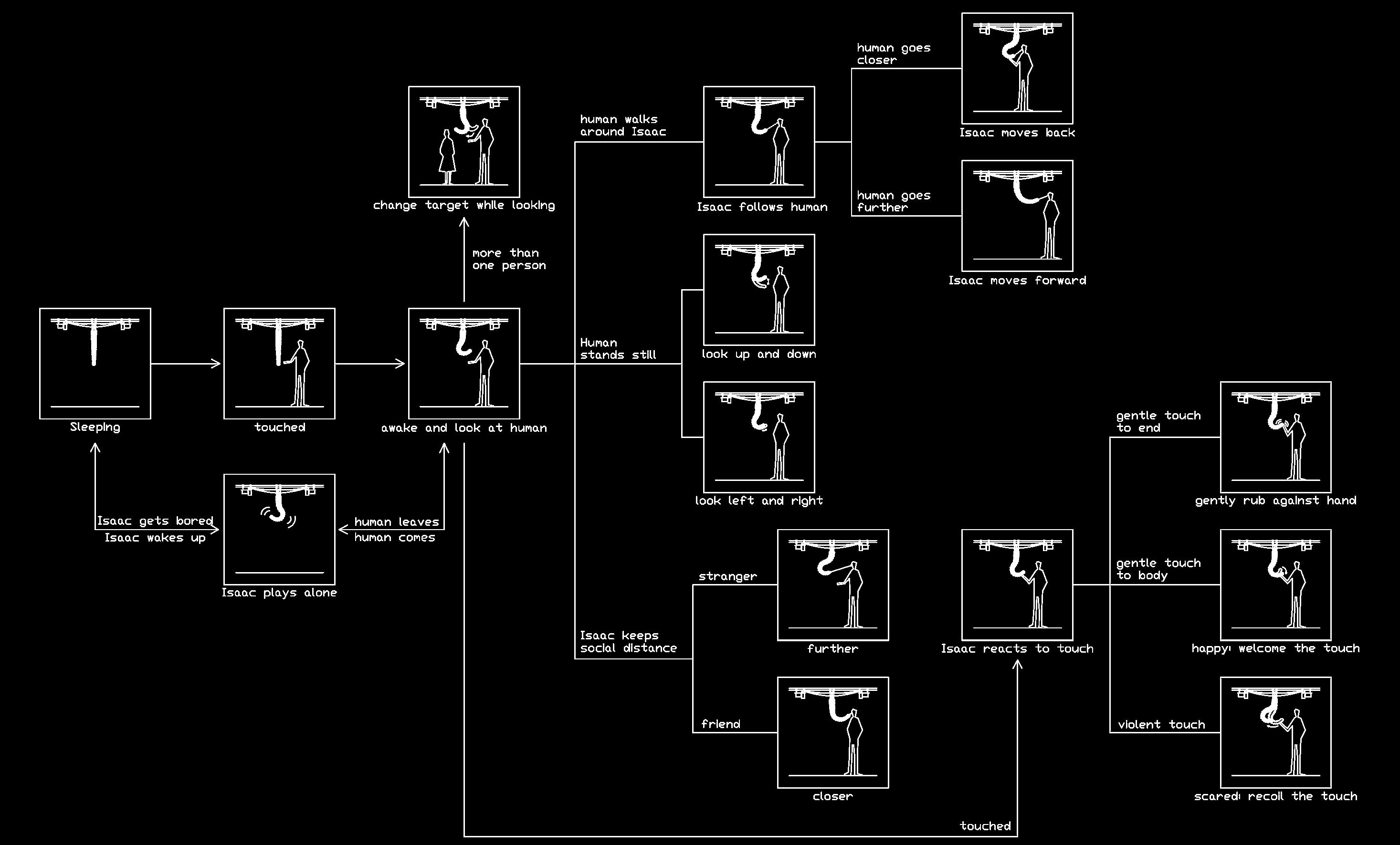
What does it feel like to meet a robot that seems curious about you?
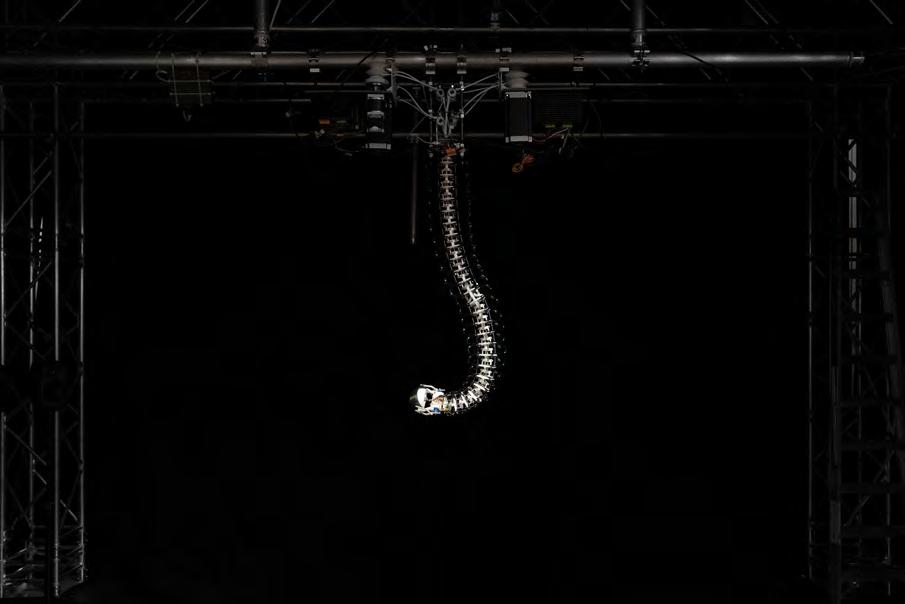
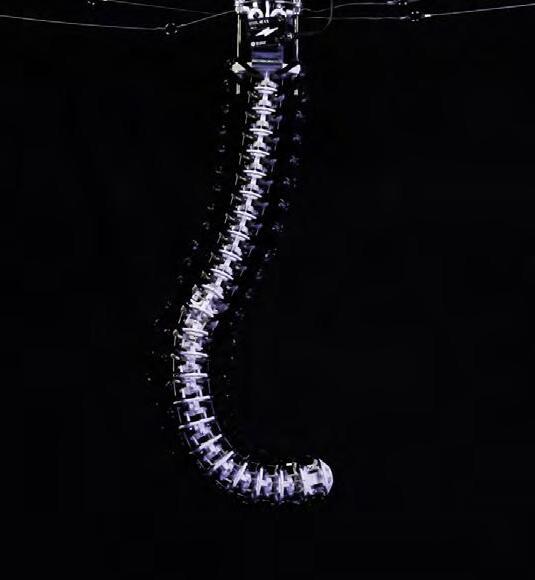
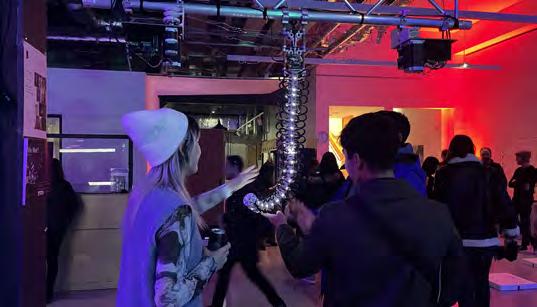
“Have We Met” is an interactive art installation that centers around Isaac, a continuum robot that is suspended in space.
With no capacity for verbal communication, Isaac's world is shaped by its flexible body and sparkling lights, designed for fluid and organic motion.
When spending time with Isaac one can experience a sense of strange intimacy that is lost in contemporary Human/Machine interfaces.
Wriggling movements are the means whereby Isaac expresses emotional states of pleasure and pain to its new acquaintances.
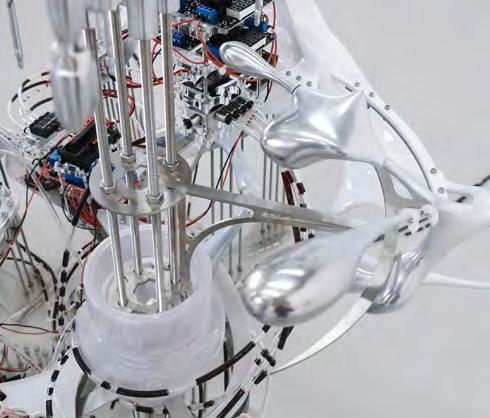
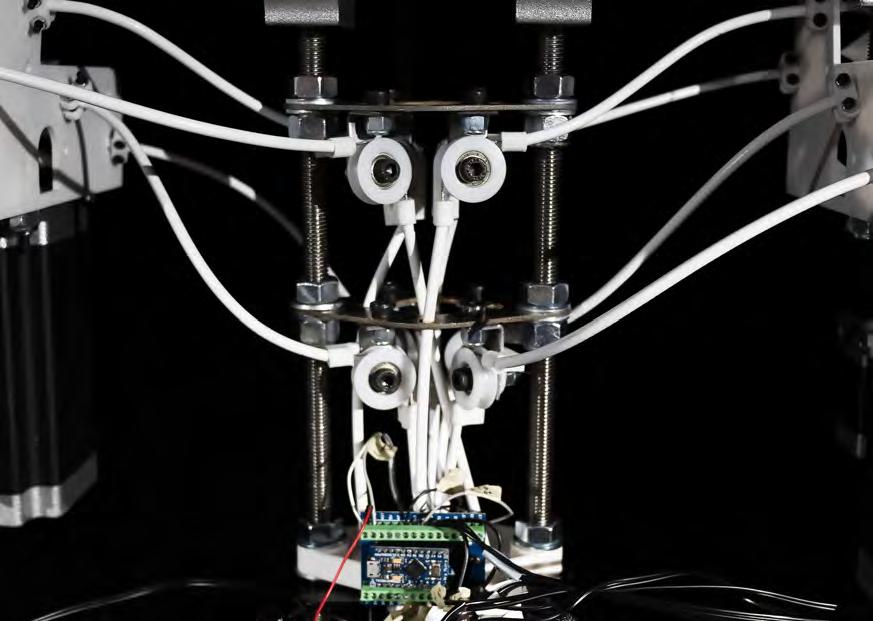
Four motors actuate Isaac’s four degrees of freedom, while microcontroller PCBs sit inside each vertebra embodying touch inputs and light outputs along Isaac’s body.
Isaac will try to entice anyone who enters its body space to touch, because touching allows Isaac to perceive the detailed reactions of participants as they poke, stroke and tickle the robot surface.
“Have We Met” encourages exploration not just of novel human-robot interactions, but specifically situations where movement and touch are used to create a shared language.



TECHNICAL DRAWINGS
U-JOINT SECTION
We tested different continuum structures, and finally chose Universal Joints (U-Joints) as segments of the robot, because it does not twist easily, and it is easier to install. 3D printed TPU bars are fixed to each U-Joint in order to provide rigidity to the whole structure. These TPU bars of different sizes help the structure to create a curve-like bending motion and avoid wrapping and twisting.
It takes a lot of force to pull the wires to bend the top section because it lifts the bottom bending section while bending and it has cable housings running through the center providing rigidity. Therefore, we added little pulleys above the continuum structure to convert vertical force to horizontal, making it easier to arrange the position of the motors and guide the wires to the larger pulleys on motors.
M3 Nut
Hole for Cables and Housings Through M3
Guiding
PULLEY MECHANICAL DESIGN
Metal wires through the outer edge of each joint are used to control the continuum structure. The bending motion is implemented by pulling the wires with stepper motors. The middle section is the connection between the two bending parts of robot. It gets the cable housings fixed and guides the wires of the bottom section through them. The cable housings can not only transmit mechanical force of the bottom section to pulleys on motors, but also go through the top bending section and provide rigidity for it.
To add a deeper degree of interaction to Isaac we wanted to be able to detect touch inputs and control lighting outputs along the length of his body.
Being able to detect touch lets us create more intimate interactive use cases where the ues wants to go past just movement to communicate with Isaac.
Animations on the matrix of lights along Isaac's body allow us to subtly add emotional expression to the physical movements, based on the speed, frequency and perceived intensity of the animation.
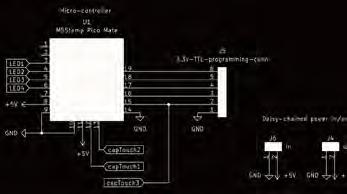
To neatly fit this new level of functionality in we designed a standardised PCB that fits in between each "vertebrae" U-Joint section. Each with four side emitting LED outputs and capacitive touch inputs connected to conductive thread sewn into the TPU springs.
An ESP32 based microcontroller on each PCB allows us to wirelessly receive touch signals and send led animation data from the main computer running the installation.
When an audience touches Isaac, it responds with lighting effects and bending movements.
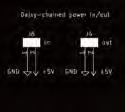
Circuit Diagram(left) by Adam Ray Braun




UNCERTINTIES OF MOVEMENT CONTROL
The control of continuum robot has many uncertainties, such as the complexity of mathematical model, structure twisting and hysteresis effect. A lot of research focuses on the precise control of continuum robots for medical and industrial use.
However, most of the continuum robots are on a small scale. Some continuum robots for industrial use are large, but they are much more difficult to operate. What’s more, the interaction with continuum structure in installations still needs to be improved. Most of them are not interactive but only responsive or choreographed. The movements lack variety and don’t contain enough information for interaction. With a focus on interaction, we can find a new balance of accuracy, scale and operation difficulty in continuum robot design.
In the movement study of continuum structure, uncertainties of continuum structure control are analysed with physical and simulation model. The study aims to find the tolerance for the uncertainties in interaction.
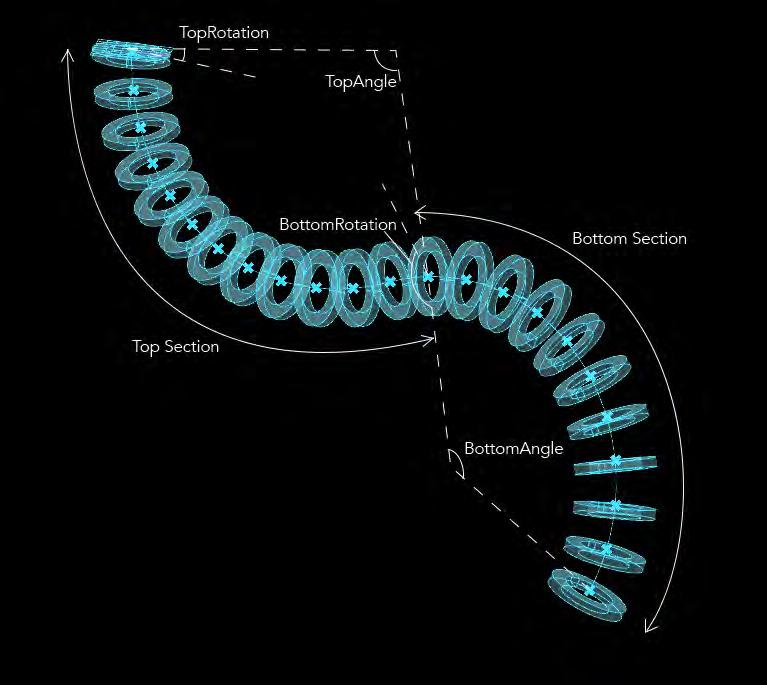
SIMULATION IN GRASSHOPPER
A 3D model of continuum robot is built in Grasshopper as the simulation under ideal condition. It has two bending parts with adjustable parameters of length, bending degree and number of vertebrae. The ideal condition here means that on one bending section of the continuum robot, the angle between each vertebra is even. Therefore, the two bending parts are two arcs tangent to each other.
The parameters of the simulation model are adjusted to match the physical model. Series of photographs are taken to compare the continuum structure with simulations, and the uncertainty lies in the difference between them.
The simulation model also helps me to test and study various motions of continuum structure. What's more, we used Galapagos in Grasshopper to test how to move the tentacle end to human accurately. Galapagos shows the difficulty in precise control of continuum structure, which proves the importance of the movement study based on uncertainty.





























Simulation of Interaction in Grasshopper
Some Photo Series for Movement Study


TopAngle =






Adjusted Simulation 5-2



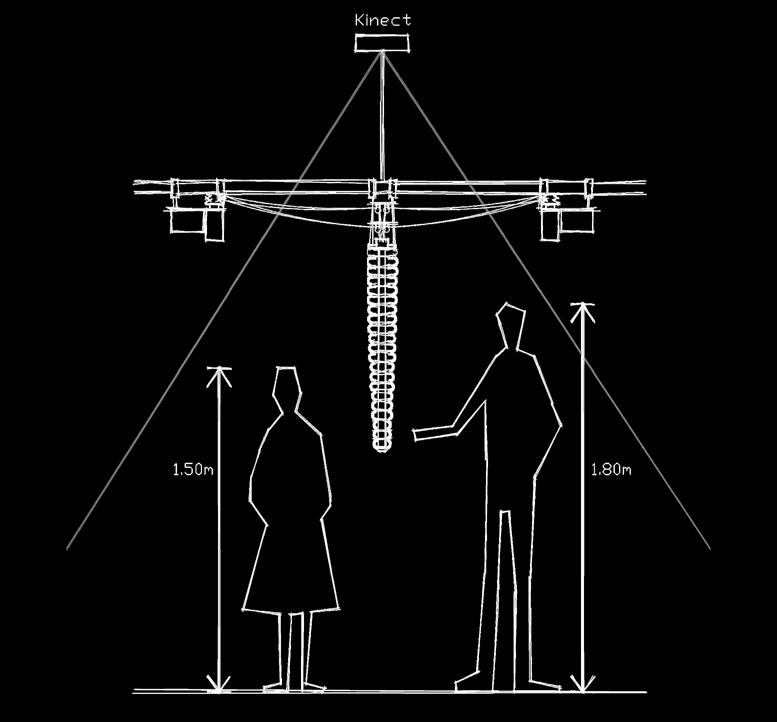
In order to make the movement accurate, we use kinect to get the position data of both the robot base(X0, Y0) and people(X1, Y1). If the person is standing in the positive direction of X Axis, the wire in the corresponding direction needs to be pulled. If the person is standing in the first quadrant, which means X1 and Y1 are both positive, then the wires in the positive x direction and the lines in the positive y direction have to be pulled.
Because of the importance of direction and angle, we convert the position data to polar coordinates. By calculating the angle of human position in polar coordinates, we can figure out how much each of the wires should be pulled, and finally convert this into motor movement. The final result is very precise in control.


In order to make the robot behaviour more reasonable, we need to build a system of emotion and create personality for it. The diagram above shows how the emotion system works with interaction.
There are various emotion models used for psychology, facial-recognition, artificial intelligence and so on. Some of them can be very complex. Considering the complexity of our project, it's better to work with some simple and workable models before diving too deep in this area.
Russell's circumplex model is a relatively simple and workable model considering valence and arousal as parameters. By matching different ranges of coordinates to specific emotions, we can get a map of emotion as shown in the figures on the right. Different emotion maps stand for different personalities. Also, how inputs influence the parameters is also part of the personality. With these two ways, we can create various personalities.


Top View from Kinect
Motor Controlling Graph
Facial Recognition
Sound recognition
Action Recognition
Tactile Sensor
Distance Sensor
Photosensitive Sensor
- Facial Expression, Eye Contact
- Words
- Position and Gesture
- Touch - Distance
- Light Intensity
Possible Input
INTERACTION PRINCIPLE
There are many branching permutations of interactions possible with Isaac, mainly constrained by the range of expressions possible to be made by its movements, and the range on inputs available to be detected by the hardware setup.
Despite this broad range of options, we choose to not include any signposting / guidance on what interactions are available, instead leaving the interactive journey to be discovered naturally by the audience.
Emotion Parameters
Emotion Coordinates Valence and Arousal
Personality
Emotion Map
Parameter Principle
Interaction
Behaviours
Body - Continuum Structure (Motion, Moving Speed, Human Tracking...)
Head - End Effector (Head Movement, LED Light...)
Sound...
Possible Output








Bloomsbury Exhibition of DFPI, 2022.05.06
MArch Design for Performance & Interaction Project Fair, 2022.12.09
Backitchen X The 1st Annual METAVERSE Art, 2022.07
TED x Goodenough College Event, 2022.07.30
London Festival of Architecture, 2022.06.24
Ars Electronica Festival, 2022.09.07-11
Ars Electronica Festival, 2022.09.07-11
The Bartlett Fifteen Show, 2022.12.08-23
Eyeball end effector collaborated with Saiyuan Li

04 LIVE ON MARS
Mars Habitat Design: The Initial State of Life
Animation Link: https://vimeo.com/527868938
Dynamic Model Download Link: https://we.tl/t-HSXjvSGWXm
Instructor: Weiguo Xu
Collaborate: Yuxuan Cao
Location: Mars
Duration: 8 Weeks Spring 2020

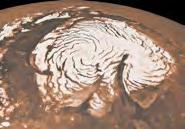
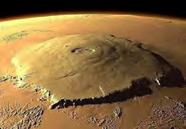
In the course of evolution, the curiosity for the unknown has led us beyond Africa and to every continent on the planet. At the same time, we have never given up exploring the vast universe. A hundred years from now, how will we be living as the first creatures to land on Mars? What role will architecture play in human life on Mars? During this Martian habitat design, we keep thinking of the essence of architecture, and tend to break the stereotype of conventional architecture.

Mars exploration boom Space Industrialization

The European Space Agency (ESA) and the Russian Federal Space Agency (Roscosmos) have announced that ExoMars 2020, originally scheduled for launch this summer, has been officially postponed until 2022.
ExoMars landed at the bottom of the Milas Canyon on the surface of Mars. After months of analysis of the atmosphere and surface weathering layer, it found a large amount of methane and a wide variety of sulfates. This can only be the result of organic reactions, that is to say, the conclusion that organic matter exists on Mars can be basically finalized. The spread of this news shocked the world, and human enthusiasm for the exploration of Mars has reached an unprecedented height.
More than 30 countries including China, the United States, ESA, Russia, Canada, Japan, and India have jointly announced that the first manned landing on Mars will be carried out within ten years.

The landing module carrying 3 astronauts landed at the foot of Mount Helopentes on the western edge of the Greek plain on Mars. This is the first time humans have landed on an extraterrestrial body other than the moon. The development of the two-hundred-yearold Martian virgin land is about to start.
Due to the turmoil of the international situation, the cooperating countries have serious differences in the right for the research results of Mars, and the manned landing technology is also facing the danger of being monopolized. The International Mars Development Organization has no real power, and the largest international cooperation in human history is on the verge of bankruptcy.
The powerful aerospace powers have put forward a development strategy of "space industrialization", supporting their own aerospace companies to seek economic stimulus. New industries such as interstellar communications, transportation, extraterrestrial energy, mining, low-gravity manufacturing, and rail tourism are beginning to emerge.

The advancement of technology has led to the annual reduction of the cost of spaceflight, and the competition in the space market has become increasingly fierce. The low-Earth space market with development value such as the moon, C-type, and M-type near-Earth asteroids has long been carved up by major space companies.
People begin to realize that the industrialization of space has essentially hindered the development of deep space exploration and interstellar migration. It has only brought new economic entities with strong power and influence on the world situation. The idea of colonizing Mars begins here.
The Interplanetary Migration Bureau, the first institution in the history of space exploration to engage in interplanetary migration, is established, and responsible for the coordination and preparation of Mars migration in the following years.

Twenty Martian settlers from all walks of life and nationalities landed in the southeastern part of the Ihidi Plain near the north-south boundary of Mars, announcing the beginning of the pre-Martian colonial era.
In the early days of Mars colonization, due to the consideration of resource reduction and communication cost, various interstellar immigration bureaus consciously gathered to establish colonies. In the era when the information and logistics network of Mars has not yet been established, these clustered colonies have naturally developed into an economic entity that can achieve internal self-sufficiency, which transcends the organization (covering the concepts of countries, cultural circles, and national entities on the Old Earth) The human settlement entity gradually evolved into an existence similar to a city state. Martian residents call it Pan-Organizational Large Independent Settlement (Pan-Organizational Large Independent Settlement), or POLIS for short.

In 2200, with the application of quantum communication technology, the era of quantum communication code-named Q was announced. Interplanetary Communications, the largest communications provider among the Martian states, monopolizes services including Earth-Martian communications, asteroid-Mars communications, Earth-asteroid communications, and Mars interstate communications.
In the Q era, people on Earth no longer have to stand in front of the screen and endure the ten-minute communication delay, just to witness a beautiful Martian proton aurora, or to watch an exciting vertical football tournament.
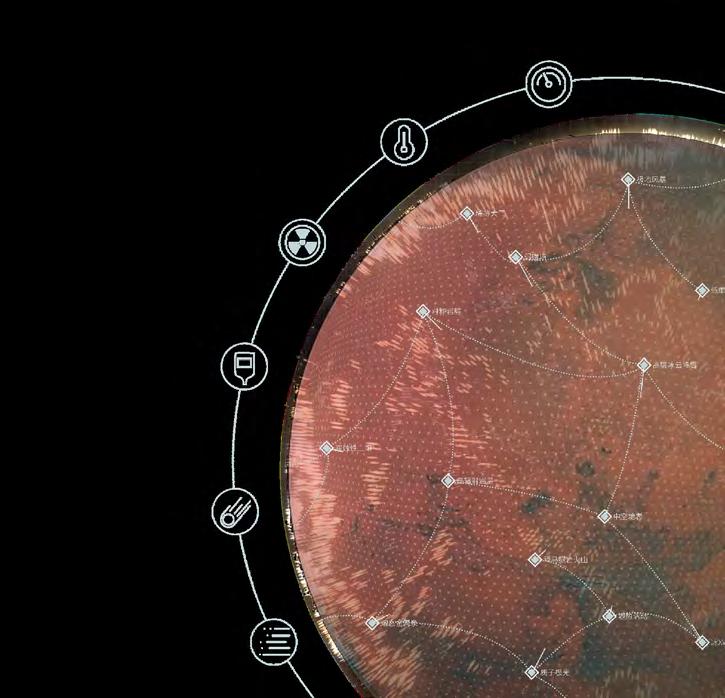
The power of information has long been known. In order to respond to the urgent needs of people on Earth and Mars for real-time information with rich content and novel forms, Interstellar Communications has reached cooperation with Interstellar Immigration Bureau, Orbital Tourism Bureau, Institute of Planetary Geology, Mars Real Estate Development and other companies to start the Live on Mars project ,and therefore to use the influence of mass media to attract investors and promote the development of Mars.
The main content of the Live on Mars interstellar network media platform is to use live webcast to truly record the daily life and scientific research of Mars scientists, including biological experimental research, geological exploration, and the entire process of Mars tourism resource development, or invite celebrities to experience life on Mars and produce variety shows. It has both knowledge popularization, educational significance and entertainment.

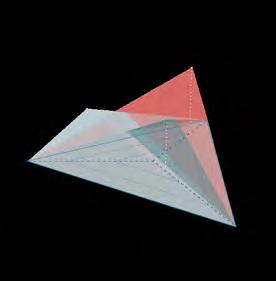
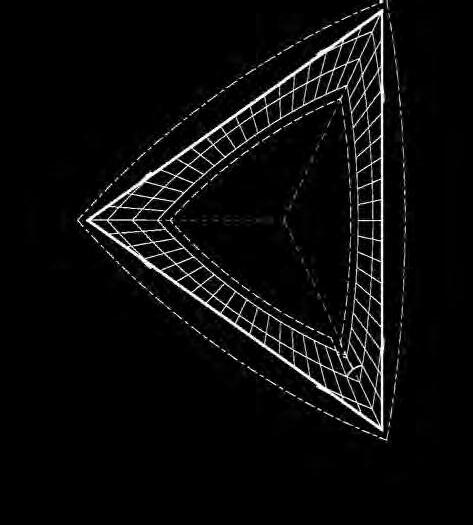
The first colony to reach the size of a city-state was Tetrapolis in the Plain of Ihidi. The name of this citystate is derived from a certain superstition of the old earth astronomer Kepler-he compared the five convex polyhedrons with the time. Corresponding to the five known planets, Mars corresponds to the regular tetrahedron.
After half a century of development, the seven citystates/special administrative regions have mutually benefited each other and competed to achieve the best of star development. A huge number of satellite cities have developed around the city-states, forming a complex city network. Due to the rapid emergence of Martian cities, communications, mining, and tourism have also developed rapidly. In addition, the special materialized environment of Mars has also given new directions for some disciplines that have encountered bottlenecks in their development. Science-based ideas have been widely disseminated in various city-states.


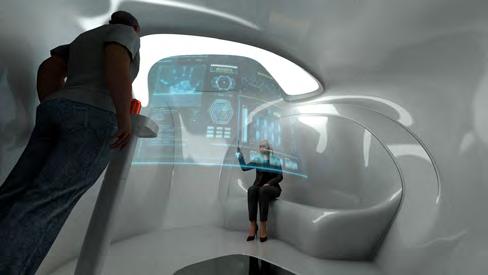
Four Martians is an extremely popular group anchor on the Live On Mars channel. It became popular throughout the interstellar network less than a year after its launch. Its programs subversively combine science and interest to create impressive program effects. There are four members of the group, and their occupations are producer, technician, biologist and geologist. Different from regular home broadcast anchors, Four Martians has a mobile live broadcast base called MLV (Moving Live Vehicle), which travels among major city-states all year round and arrives at the next city-state every Martian month for supplies. The rest of the time is spent cruising and livestreaming across the vast uncharted terrain of Mars. The programs include interesting ways to show scientific research routines, cruises in the natural landscape of Mars, and visits to the remains of the Mars rover. Sometimes even in the monthly city replenishment, celebrities or idols in the city will be invited to the mobile vehicle as guests to live broadcast their daily parade on Mars for the audience.

















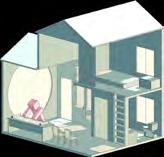
Unlike a still structure, the design is like a basic life form rolling on Martian surface, with interactive interface and interior space. We take cell as the design concept, referring to the earliest form of life in evolution and the way it adapted to environment. The design is a moving live vehicle made of deformable smart materials to move and station on Mars. The interior space can divide and fuse like cells, and carry function units (furnitures and machines) that act like organelles with their own functions. With the idea of deconstruction, we regard architecture and people as a whole, people as the brain of architecture, and architecture as the extension of human body. The interaction between people and architecture is of particular concern to us.



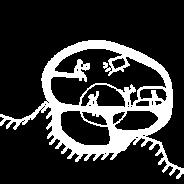
The composition of MLV includes outer interface, intermediate layer, inner interface and function units. The outer can adapt to the terrain while moving or stationing. At the same time, the interior can instantly form space with stability according to the needs of users.
SMART SURFACE
Both the internal and external interfaces of MLV are interactive surfaces to change shape at any time. For the outside, the interactive surface fits the ground more accurately, providing the necessary friction, thrust and traction while moving. The relative movement of the outer and interior is to ensure the stability of inner rooms. For the interior, the interactive surface creates the corresponding space in time, and take back the unnecessary functions, so as to save space and achieve dynamic feedback.
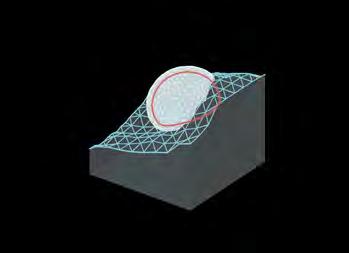
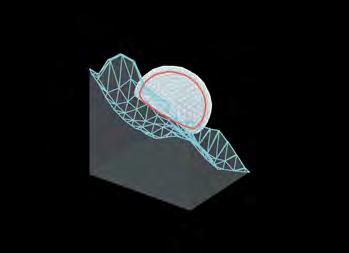
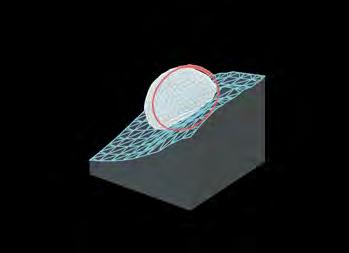
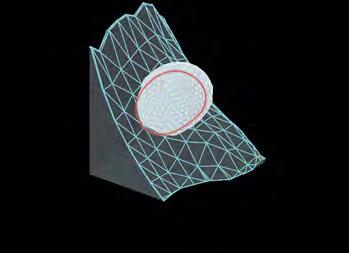
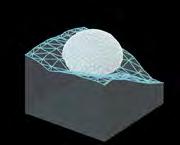
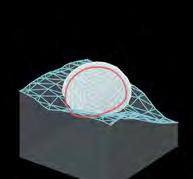
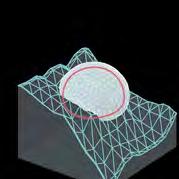
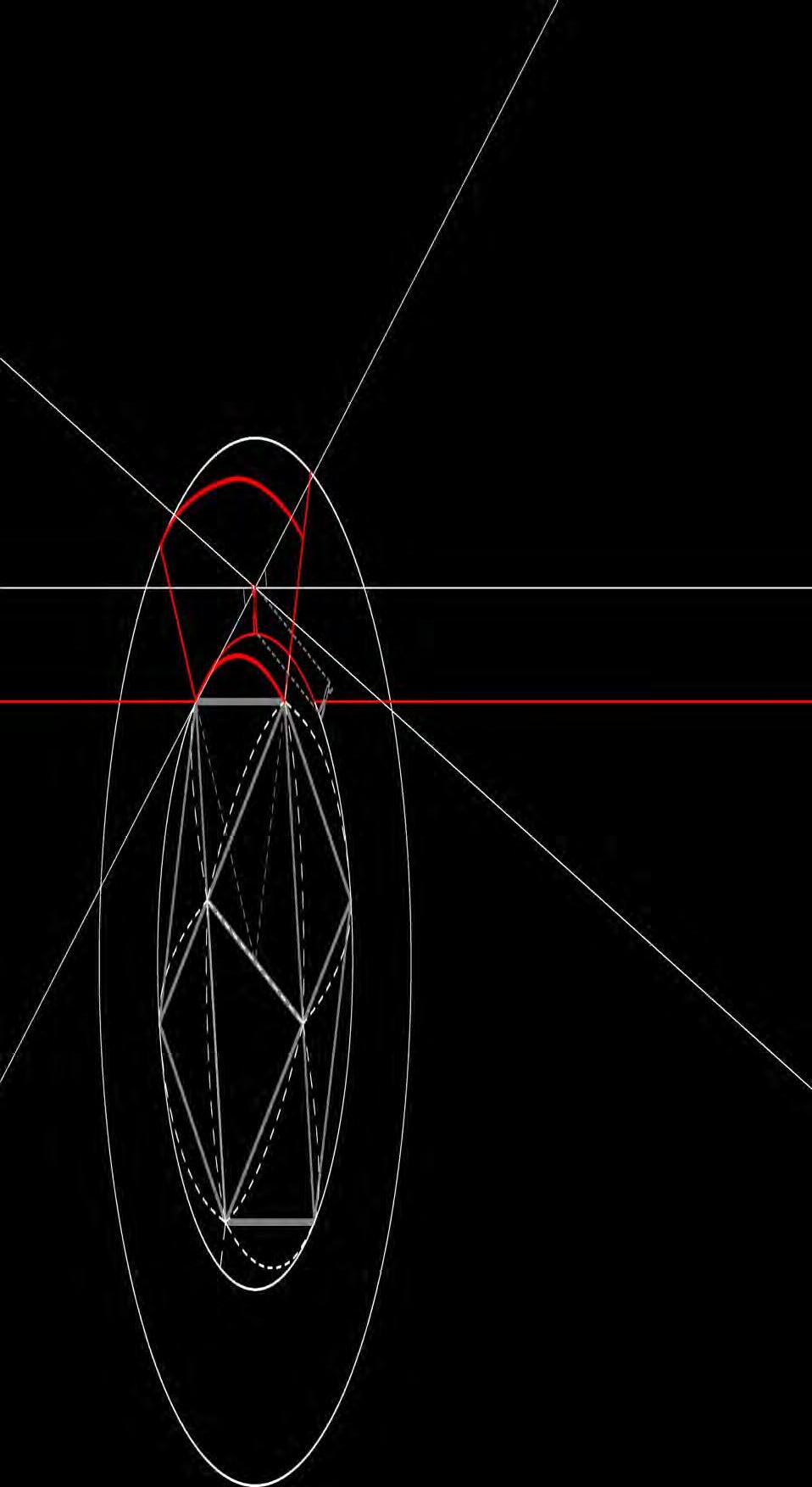
REFERENCE SHAPE
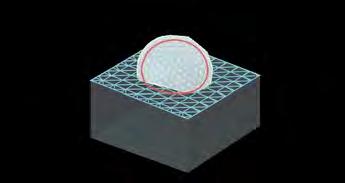
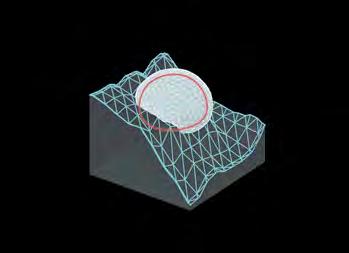
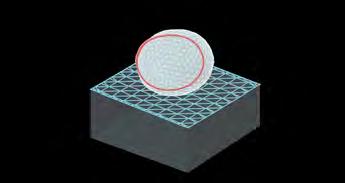
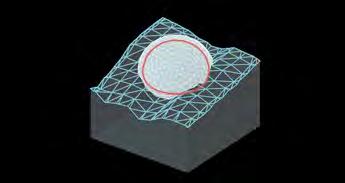
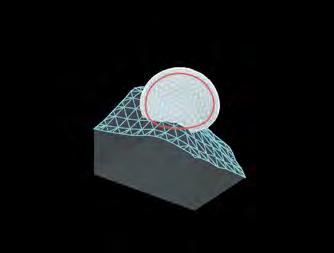
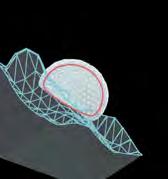
The outer surface has a changing reference shape to adapt to different moving and stationing situations. On flat ground, a sphere is more convenient for rolling. When the ground is a slope, the flatter shape along the slope keeps the center of gravity within the projection range of the ground, and can grasp the ground better to prevent rollover.
FUNCTION REALIZATION:
MLV adopts environmental intelligence, which is an electronic environment with sensing and feedback to users. We divide needs into [space] and [application]: the interior surface creates space and combines with function units, which is similar to furnitures.










Firstly, high interactivity is the main characteristic of this design, including interactions with the terrain and with the user. This design has no fixed standard form, but constantly changes its shape in the interaction with environment and with people. The traditional design on paper and static modeling cannot show this high interactivity.
In addition, if the traditional static design method is adopted, it is impossible to avoid the designer's subjective assumption and to meet the arbitrariness of the environment, and therefore impossible to reflect the real interaction.
To sum up, in order to highlight the interactivity of the design, we decided to program and run the design scheme on Unity3D engine platform, and the result of this design will be a live interactive model.





Unity3D engine is mainly used to develop games, containing some existing editable game system, or some interactive real-time image application. It helps game designers to develop games without starting from zero. Also, the engine supports multiple operating platforms like Windows, Android, iOS, Mac OS X, Linux, etc.
The programming language used by Unity3D is C#, which is an object-oriented programming language. This design includes a lot of geometric deformation algorithms to deal with the external environment and user activities, and the compilation and operation efficiency is relatively high with Unity3D.
The graphical application interfaces used by Unity3D include DirectX and Opne GL. In this design, the HLSL language based on DirectX interface is mainly used in the Shader writing of geometric interface, so as to alleviate the calculation load of CPU and make full use of GPU.
Unity uses the PhysX physics engine developed by Nvidia. In this design, there are a lot of algorithms based on physics, and the use of PhysX engine saves time. The simulation results based on physics engine are also more real and convincing.


The inchworm, lacking a middle pair of feet, can only move with a flexion and extension gait. Its body is divided into three parts, the front, the middle and the back. It moves through the pull at the front end and the thrust at the back.

The snail moves forward by undulating its abdominal muscles. The characteristic of this mode of movement is that it can maintain a steady and uniform speed, but the surface needs a certain degree of segmentation to form a ripple, and it is not easy to speed up.

The movement of snakes can be divided into telescopic, circuitous, lateral and branch. Each of these methods requires different parts of the snake's body to move around each other, using back-end thrust, front-end pull, or active weight shift to move forward.

Armadillos have two ways of moving: walking and rolling. When walking, it moves forward by the static friction force between feet and ground. Armadillos curl up in a ball when they are in danger. They can be pushed forward by external forces or by surface pushing and weight shifting.
Through the analysis of the above several typical biological movement prototypes, it can be concluded that active movement includes walking, crawling, rolling and other ways. The mechanical strategies include center of gravity transfer, friction borrowing force and zoning drive. In consideration of stability, convenience and realizability, rolling is finally selected as the movement strategy of this scheme, and the rolling behavior is promoted through the center of gravity shift and the thrust with the ground.





LOW SPEED / STATIONING HIGH SPEED
REFERENCE SHAPE STRATEGY
The outer shape of MLV is influenced by the reference shape and terrain. At the same time, the reference shape also changes depending on the terrain and the movement of the MLV.
According to the MLV center point, the tangential and axial directions are determined for each point on the surface.
The tangential direction is used to rotate the surface points around the center of the MLV to achieve the rolling forward effect on terrain.
Axial orientation, the direction from the point to the center of the MLV, is used to constrains the growth and retraction of the points to fit the terrain and the reference shape.
The surface that is within a certain distance of the ground is called the near-ground part. The rest is called the remote part.
The growth of each point on the remote part refers to the reference shape, while the growth of each point on the near-ground part refers to the ground to adapt to terrain.
The side close to the ground and behind the direction of movement is called the pushing part, where the points grow outward to create a push against the ground for MLV to roll forward.
Thw pushing part prevents MLV from getting stuck by bumps on the ground, especially on rough ground and sloping ground.
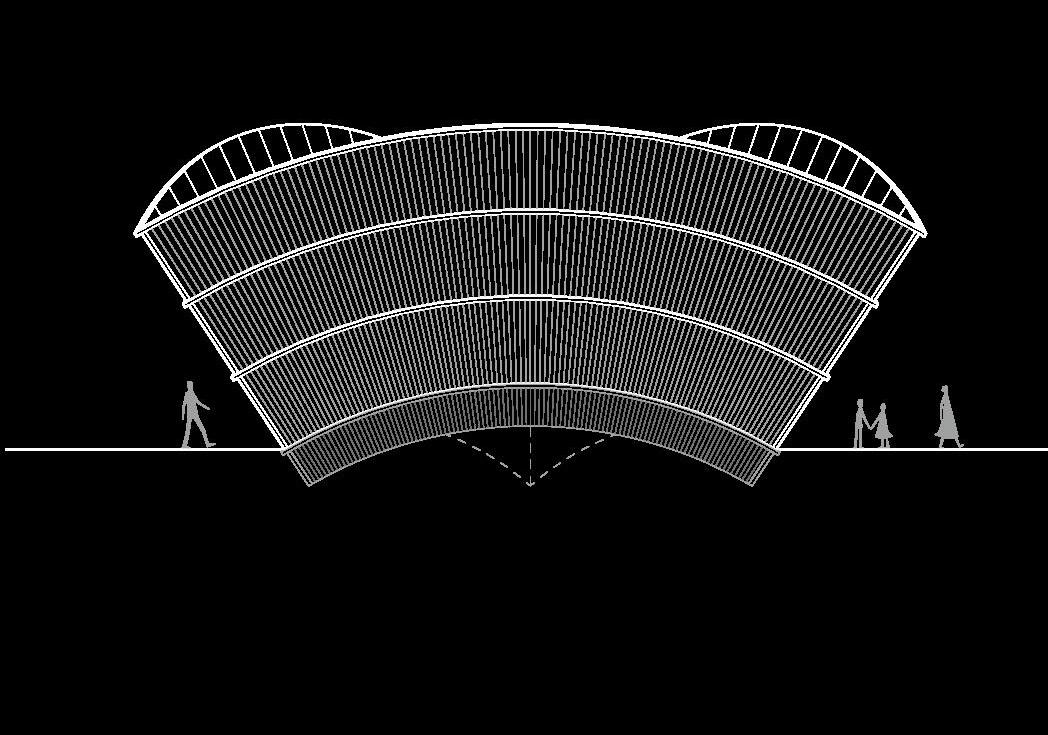
Flat ground is the easiest for MLV to adapt to without affecting stability.
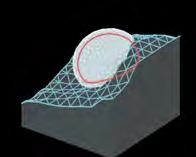
While moving slowly or stationed on flat surfaces, there is little limit for the shape of MLV. If there is no special requirement, the circular arch with a larger contact area with the ground is suitable as a reference.
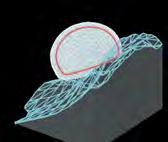
When moving at high speed on flat ground, the reference shape tends to be a sphere, which is more convenient to roll forward. The faster it moves, the rounder it is.
On rough ground, the center of gravity is prone to drastic changes up and down. Terrain affects the shape and position of the interior space, and it is easy to cause the MLV to roll over.
For the interior part, the elevation of rooms can be raised to avoid the continuous impact of the ground bump on the room position.
As for stability, the contact area with terrain is enlarged in order to grip the ground better.
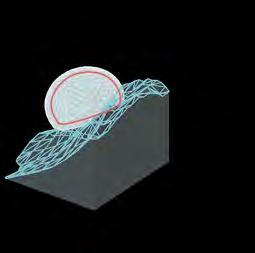
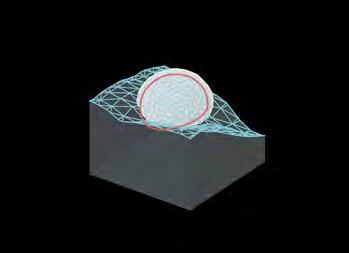
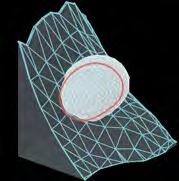
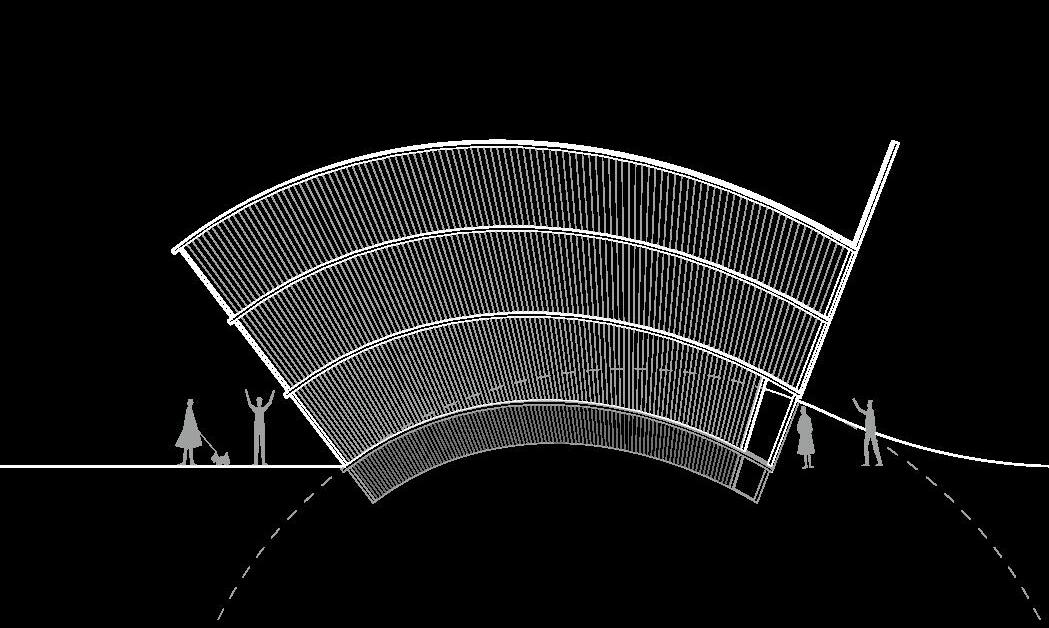
For the sloping ground, the most likely accident is to overturn and roll down along the slope, which is very dangerous.
By increasing the contact area between MLV and the ground, and increasing the length of the body along the slope, the center of gravity is always within the contact range with the ground, thus enhancing stability and preventing overturning.
When stationed on the slope, MLV's reference shape is a circular arch with a large base area. When moving, the faster it is, the flatter and longer the reference shape is. TERRAIN TYPES
Remote Part:Take reference shape as reference
Near-Ground Part:Take ground as reference
Pushing Part:Take ground as reference
Points on the outer interface grow in the direction close to their respective reference surfaces. Through the combination of various partitions, the outer interface adapts to the terrain and freely changes its shape.
vert_isOn=0 vert_isOn<0
The tangential motions of the points cause rolling, while the axial motion is used to fit the reference shape. We set a safe distance a for the growth of the points. The growth ends as long as the distance from the reference surface does not exceed a. The growth state of each point on the outer interface is controlled by vert_isOn variable: if vert_isOn>0, point move outwards if vert_isOn=0, no point movement if vert_isOn<0, point move inwards vert_isOn>0 vert_isOn=0 a a
Outer & Inner Reference
Pushing Part
Near-Ground Part
Tangential Axial & Distal Parts
Partition of Surface
Flat Ground
Rough Ground
Sloping Ground
FLAT GROUND_STATIONED
FLAT GROUND_MOVING
SHARP EROSION LANDFORM
BEDDED ROCK
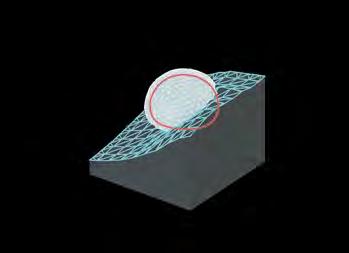
SLOPING GROUND_STATIONED
SHIELD VOLCANO
SLOPING GROUND_MOVING
MAZE TERRAIN


public void Melt(float meltValue)
{
{
megaMelt.Amount += meltValue * Time.deltaTime; if (velocity<6)
Driving at low speed, the slower MLV moves, the larger the contact area with terrain is
megaMelt.Amount = Mathf.Clamp(megaMelt.Amount, 49f-velocity *8 + Math.Abs(deltaH/ Time.deltaTime) *8,50f); }
{
public void IsContacted(int vertIndex) { LayerMask lmGround = 1 << 31; LayerMask lm = 1 << 8; vert_copy_world[vertIndex] = this.transform. TransformPoint(vert_copy_local[vertIndex]); RaycastHit hitInfo;
The shape is more round when moving at high speed, which is convenient for the outer interface to roll
megaMelt.Amount = Mathf.Clamp(megaMelt.Amount, 0 +Math.Abs(deltaH / Time.deltaTime) *8 , 50f);
public void Stretch(float stretchValue)
{
megaStretch.amount += stretchValue * Time.deltaTime;
The greater the slope, the longer the reference shape, to prevent overturning
megaStretch.amount = Mathf.Clamp (megaStretch.amount,0f, 0.08f + Math.Abs (deltaH / Time.deltaTime)*0.05f );
if (Vector3.SqrMagnitude (vert_copy_local[vertIndex]) < 0.01f ) { vert_isOn[vertIndex] = 1; }
Avoid retraction beyond the origin forming a reverse surface Adapt to terrain and retract appropriately if detected contacting ground
else if (!Physics.Raycast (vert_copy_world[vertIndex], -reference.transform.up, out hitInfo, 40f, lmGround))
{ vert_isOn[vertIndex] = -0.2f; } else { if(Physics.CheckSphere (vert_copy_world[vertIndex], contactDistance, lmGround) && Physics.CheckSphere (vert_copy_world[vertIndex], 1, lm)) {
Smooth follow of the outer interface and the reference shape
void Update() { this.transform.position =Vector3.SmoothDamp (transform.position, leader.position + new Vector3(0, 0, 0),ref currentVelocity, smoothTime); GetComponent<Collider>().material.dynamicFriction = 1; vShell = (leader.transform.position-ShellPosition) /Time.deltaTime; ShellPosition = leader.transform.position;
Get direction of movement according to current speed
dir = new Vector3(vShell.z,0f,-vShell.x)/10; dir_Local= transform.InverseTransformPoint(dir)transform.InverseTransformPoint(Vector3.zero);
Smooth follow of the outer interface and the reference shape
yMove =Vector3.Cross(vShell,dir).normalized; for (int i = 0; i < vert_copy_world.Length; i++) { vert_radialDir[i] = vert_copy_local[i]; vert_moveDir[i] = Vector3.Cross(dir_Local, vert_radialDir[i]).normalized ;
The radial and tangential direction of movement of each point
Check the contact state of each point on the outer surface with terrain and let the points grow
IsContacted(i); ChangeVert(i); } UpdateMeshVert(); UpdateCollider(); thisMesh.RecalculateNormals(); }
public void ChangeVert(int index)
{ vert_copy_local[index] += Time.deltaTime * ((Mathf.Abs(Mathf.Sin(Vector3.Angle(dir_Local, vert_radialDir[index])*Mathf.Deg2Rad)* vert_radialDir[index].magnitude * angleSpeed))* vert_moveDir[index]*vShell.magnitude/10 + vert_radialDir[index].normalized * vert_isOn[index]*speed); }
Points on the outer interface grow according to the parameters
The pushing part (rear part near the ground) pushes the ground to promote rolling forward
}
The front end when moving and the near ground part when stationing adapt to terrain
if (vShell.sqrMagnitude>0.1f && Vector3.Dot (vert_copy_local[vertIndex], this.transform. InverseTransformDirection(vShell.normalized)) <-0.01f&&Vector3.Dot(vert_copy_local [vertIndex],this.transform. InverseTransformDirection(yMove))< -0.2f ) { vert_isOn[vertIndex] = 0.2f; } else { if (!Physics.CheckSphere(vert_copy_world [vertIndex], 1, lm)) { vert_isOn[vertIndex] = -0.1f; } else { vert_isOn[vertIndex] = 0.1f;
} } } else { if (!Physics.CheckSphere(vert_copy_world [vertIndex], 1, lm))
The remote part (upper part) of the outer interface grows according to reference shape
{ vert_isOn[vertIndex] = -0.2f; } else
{ if (Physics.CheckSphere(vert_copy_world [vertIndex], 0.1f, lm))
{ vert_isOn[vertIndex] = 0.2f; } else
{ vert_isOn[vertIndex] = 0; }

The traditional composition of a room is space and furniture, which can be understood conceptually as the combination of the space for activity and the appliances to carry out the activity. Space provides corresponding spatial attributes, such as privacy, public, stability, dynamicity, spaciousness, narrowness and so on. The corresponding functions are provided by appliances called Function Units, which may be large fixed furnitures or portable devices.
The generation of MLV internal rooms is based on environmental intelligence technology, which is achieved through a programmable interface and Function Units acting as furniture. Each user can call up multiple functions and Function Units and customize spatial properties. Both space and Function Units are activated when needed, while other cases compressed and stored. The generation of space is based on the functional requirements to ensure practicality, economy, privacy, but also with strong sociality.
The inner space is dynamically generated in real time, so it is necessary to set parameters for each function to ensure the quality of space. The table on the right shows the functions and rooms that may appear in MLV. Parameters are set in consideration like privacy, quietness, duration and frequency of usage, and the properties are quantified in a numerical way to generate rooms. Users can also change the parameters to realize personalization of space generation. Once the room is generated, users can also fine-tune it.
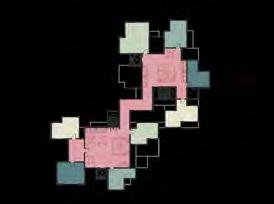
Among these parameters, compatibility and quietness are related. They determine the relative position of the rooms: the difference between the compatibility of activities in room A and the quietness of activities in room B is taken as a parameter x, and a virtual sphere with the radius of x is generated with room B as the center to simulate the interference intensity of room B. Then we make the virtual sphere physically collide with room A and get the actual room distribution position, which is the basic method of room positioning

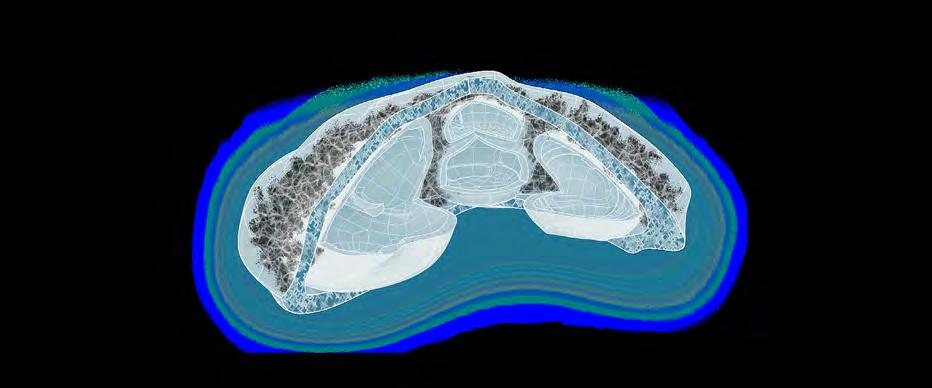
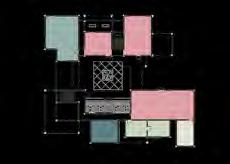
FORMATION OF SPACE
The interior part of MLV can be divided into two states: forming rooms and maintaining existing rooms. Taking cell as the concept, the rooms are called blobs. They are dynamic with flat bottoms for users to stand on. Their initial state are round archs, and always fit the surroundings. After the initial position is determined, each blob is based on the minimum area of the room to meet the needs of use, and the corresponding space is formed with a logic similar to "blowing balloons". If it reaches the maximum area, it stops growing.
FUNCTION DISTRIBUTION
In addition to the function distribution determined by parameters, there is always a living room space connecting all the units in the MLV center, which carries the most flexible and abundant function and acts as a transportation hub. The living room can also serve as space reserve, making the volume change of blobs more flexible. In the meantime, inner and outer surface of blobs can be used, and the living room will just be a space rather than a blob, connecting the rooms and enriching the space inside and outside the blobs.
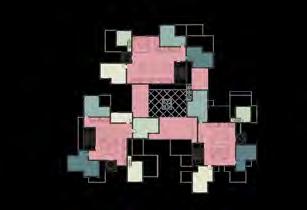
REAL-TIME INTERACTION
During and after the growth of the blobs, their shape change in real time with the deformation of the external interface of MLV. The dynamic internal space responding to the external environment in a timely manner increases the interest of use. At the same time, the stability of the interior space is ensured by the intermediate layer between the interior and outer interfaces. In addition, the intelligent skin of MLV can be freely divided, combined, like cell division, can be separated into independent rovers for Mars exploration.
Set the maximum and minimum area for each function. It can be used to predict the MLV volume and thus affect the scaling of the external interface. The growth of each blob stops when it grows to the maximum area.
0 —— Absolute private 1 —— Strong exclusivity, only compatible with activities of quiet degree less than or equal to 1 2 —— Compatible with relatively quiet activities (quiet degree less than or equal to 2) 3 —— Compatible with any activity
Represents the extent to which the blob may affect other functions nearby.
The functions with short usage time can be set near the center, and the space can be merged or converted into new functions at any time. The longer the use time is, it is arranged in the periphery relatively free from the interference of functional changes.
The functions with high frequency of use can be activated for a long time when there is enough space. For example, the living room can be used as a hub for communication and transportation and placed in the center of the internal space to connect with other blobs.
The formation of space is not only based on the function, but also to provide a pleasant experience. Therefore, special or personalized requirements should also be considered, like shape, aspect ratio and so on. Blobs can also be finetuned after formed.
BLOB POSITION
Blob Position Control
BLOB GROWTH
DYNAMIC CHANGE








Check if each blob exceeds the set volume for the chosen activity
void Update() { if (gameIsOn) { for (int i = 0; i < vert_copy.Length; i++) { isOverVolume[i] = CheckVolume(i); if (isRecoverOn[i] && !isOverVolume[i]) { isRecoverOn[i] = false; } } for (int i = 0; i < vert_copy.Length; i++) { for (int j = 0; j < vert_copy[i].Length; j++) { IsContacted(i, j); } } for (int i = 0; i < vert_copy.Length; i++) { for (int j = 0; j < vert_copy[i].Length; j++) { if (vert_isOn[i][j] != 0) { ChangeVert(i, j);// 修改 vert_copy 生长 } } innerMesh[i].RecalculateBounds(); }
UpdateMeshVert(); UpdateCollider(); } }
Check if the mesh vertex of the blob is in contact with other objects
public void IsContacted(int objIndex, int vertIndex)
{ if (isRecoverOn[objIndex]) { vert_isOn[objIndex][vertIndex] = -1; } else
{ if (Vector3.SqrMagnitude(vert_copy[objIndex] [vertIndex]) < 0.1f) { vert_isOn[objIndex][vertIndex] = 1; } else
{ LayerMask lm = 1 <<4; if (!Physics.CheckSphere(vert_copy_world [objIndex][vertIndex], thresholdDis, lm)) { vert_isOn[objIndex][vertIndex] = -1; } else
Let mesh vertices that have not yet contacted with other objects grow
public void ChangeVert(int objIndex, int vertIndex) { switch (vert_isOn[objIndex][vertIndex]) { case 1:
Forward growth: vertex move outward in the normal direction
vert_copy[objIndex][vertIndex] += (Time.deltaTime * expandSpeed / innerObj [objIndex].GetComponent<Transform>(). localScale.x) * vert_dir[objIndex][vertIndex]; vert_copy_world[objIndex][vertIndex] = innerObj[objIndex].transform.TransformPoint (vert_copy[objIndex][vertIndex]); break;
case 0: break; case -1: vert_copy[objIndex][vertIndex] = Vector3.Lerp (vert_copy[objIndex][vertIndex], vert_original [objIndex][vertIndex], Time.deltaTime * 0.1f); vert_copy_world[objIndex][vertIndex] = innerObj[objIndex].transform.TransformPoint (vert_copy[objIndex][vertIndex]); break; } }
Negative growth: Move the vertex towards the initial state
{ lm = 0; for (int i = 0; i < vert_copy.Length; i++)
{ if (i != objIndex)
{ lm = lm + (1 << (i + 10)); } } if (Physics.CheckSphere(vert_copy_world [objIndex][vertIndex], limitDistance, lm))
{ if (Physics.CheckSphere(vert_copy_world [objIndex][vertIndex], minDistance, lm)) { vert_isOn[objIndex][vertIndex] = -1; } else { vert_isOn[objIndex][vertIndex] = 0; } } else
{ if (!isOverVolume[objIndex]) { vert_isOn[objIndex][vertIndex] = 1; } else { vert_isOn[objIndex][vertIndex] = -1; } } } } } }
public void SetAnchorSphere(int index_1, int index_2) { float roomScale = 0.2f * Mathf.Pow(Mathf.Max (NewActivityManager.Instance. ActivityUnitQuietList() [dropdown[index_1 +1].value]-NewActivityManager. Instance.ActivityUnitCompList() [dropdown[index_2 +1].value]
anchorSphere[index_2].transform.DOScale (new











The external programmable interface is composed of generalized molecules with the size of microns. In fact, they are micro-computers equipped with micro-motors and sensors, which realize real-time communication and distributed computing through an analog neural signal network.
The main material is silicon nano aerogel. The material's extremely low density (1kg/m³, less than even hydrogen at standard atmospheric pressure) ensures the sensitivity of the broad molecules to move at the microscopic level. In terms of macroscopic thermal properties, its extremely low thermal conductivity (0.03W/(m·K)) ensures the stability of the thermal environment inside. Its physical and chemical properties are adapted to the sharp, cratered terrain of Mars and the highly corrosive topsoil of weathered soil.
In addition, the microcosmic arrangement of the generalized molecules can be regulated by strong electrical signals, thus regulating the visible light transmittance of the external interface. Each generalized molecule is also equipped with lightemitting diodes, allowing users to customize the color and pattern of the self-illumination.
The interior interface is magnetostrictive fiber called active fiber, which has a radial scale of nanometers and an axial scale of microns. A large number of sensors, micro computers and micro magnetic field generating elements are scattered in the fiber network, and the physical properties of the interior interface are adjusted through the process of user activity element signal input, translation, calculation and magnetic signal output.
Active fibers are woven from carbon nanotubes and Rare Earth Giant Magnetostrictive Materials, which combine the high strength and low density of carbon nanotubes with the sensitive and controllable scalability of the magnetostrictive material.
On the micro scale, different macroscopic physical properties, such as hardness, elasticity, ductility, friction coefficient, color, etc. can be obtained by adjusting the weaving mode of fiber network, which can be adjusted according to the needs and preferences of users.
05 PLANET
Installation Design: Imagination
Instructor: Hu Li
Location: Tsinghua University
Duration: 8 Weeks
Spring 2018

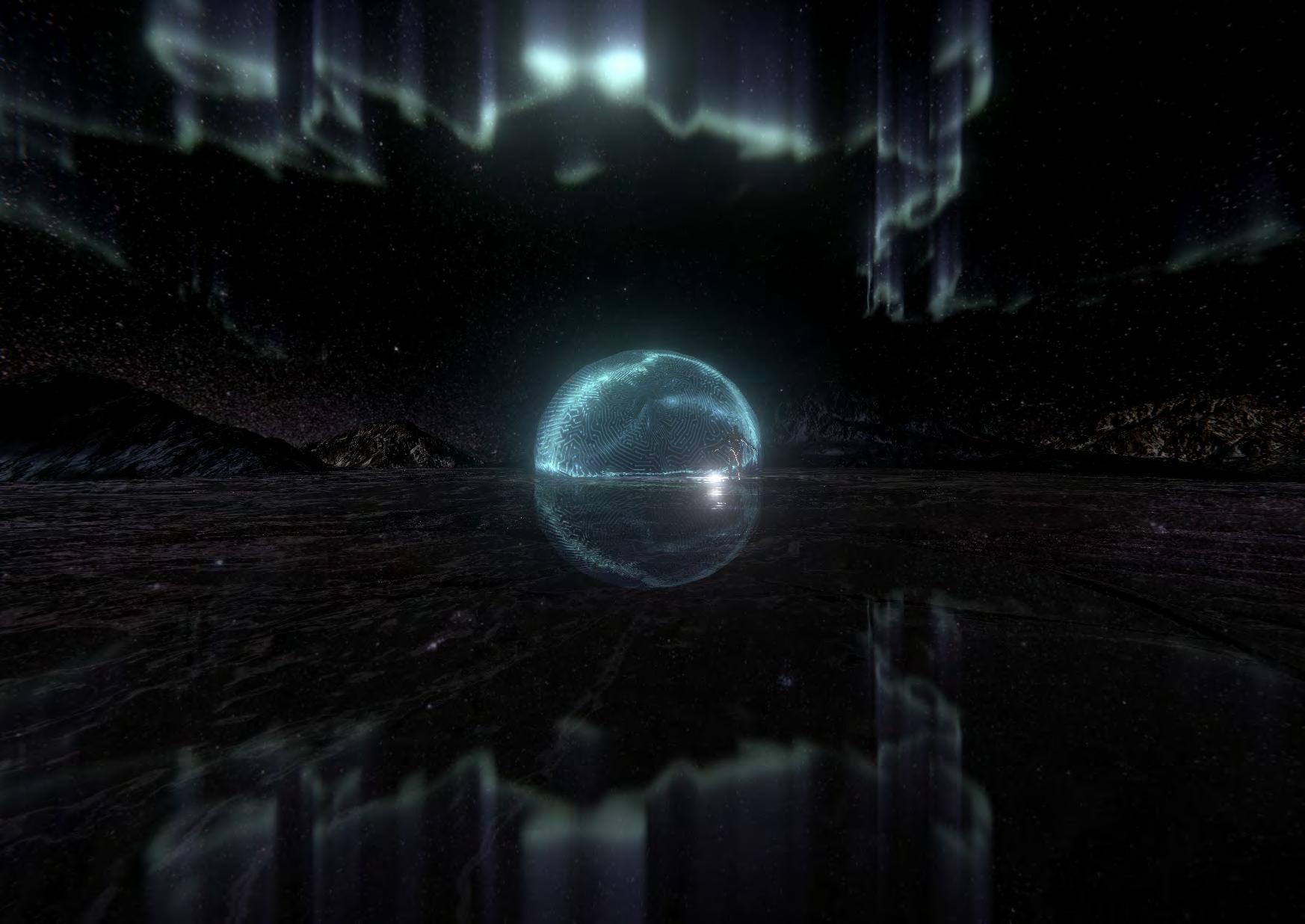
It is mentioned in A Brief History of Humanity that the Cognitive Revolution has enabled human beings to surpass other species in a new way under the premise of biological limitations. Ever since human beings acquired the ability to discuss imaginary things, we have been able to collaborate on a large scale and have developed concepts such as religion, myth, corporation, country, culture, and history. Imagination gives us a rich spiritual world and the ability to explore.
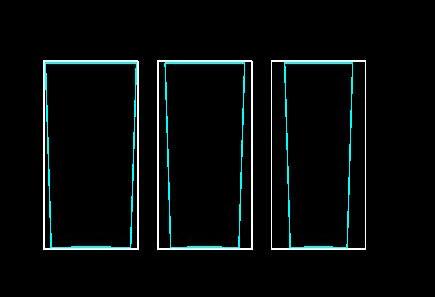
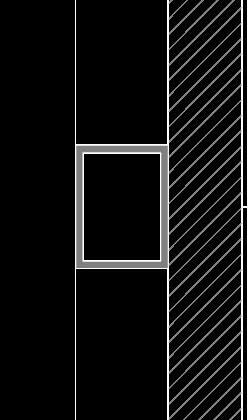
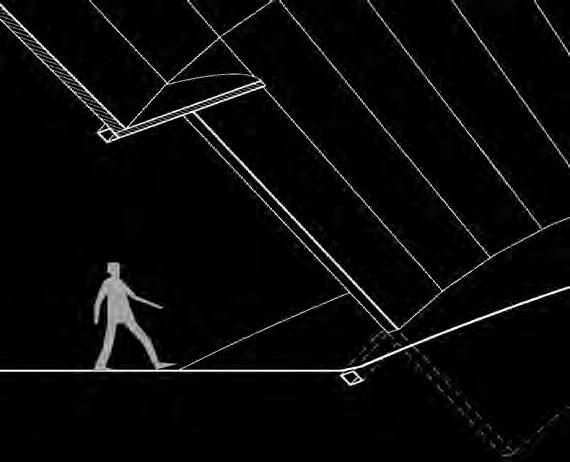
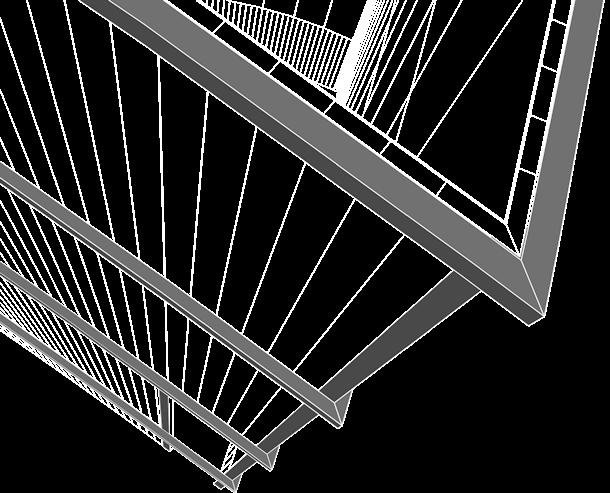
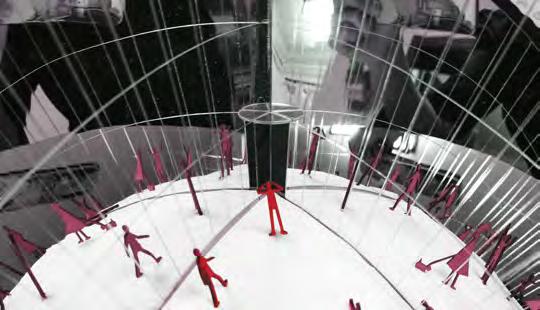
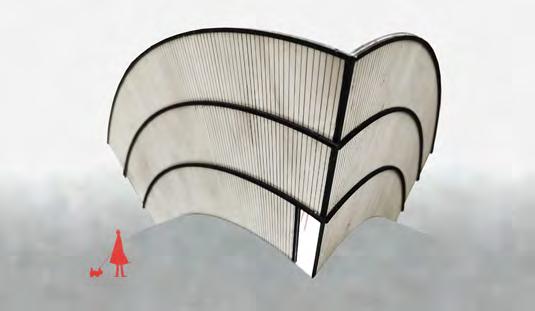
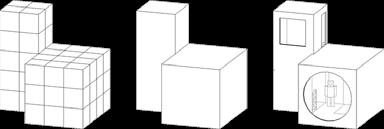
In this design, I created a virtual space through the visual illusion caused by the reflection of mirror, with the intention of mobilizing the imagination of the viewers to the greatest extent, and emphasizing the space, volume and dimension in the simplest way. On the 24-meter-wide planet, all disturbances are eliminated. You can look up at the infinite sky or meditate watching the horizon.


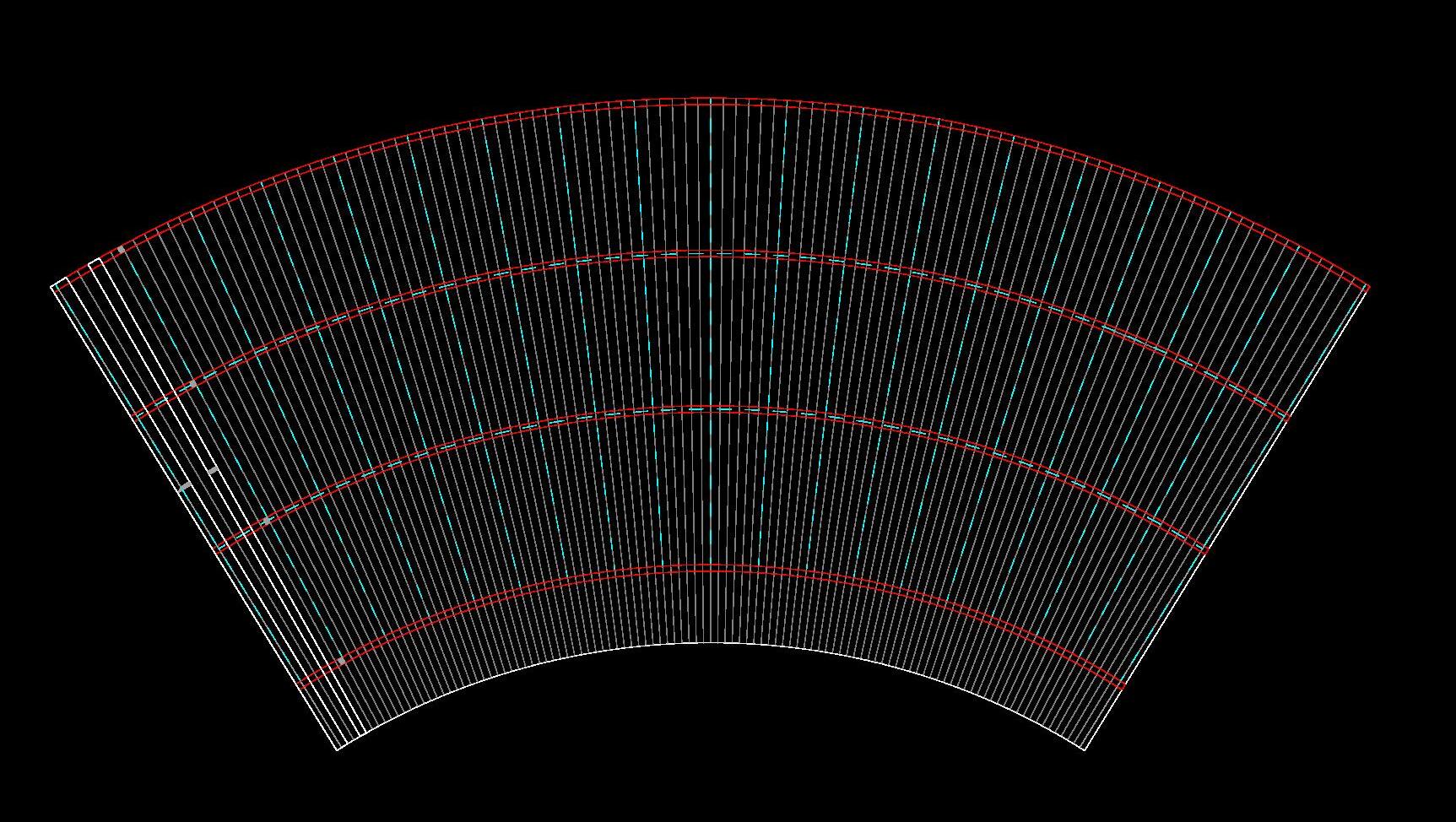
This installation does not need a specific site. It can be installed in any environment, so its materials, transportation, structure and assembly need to be as simple as possible. I did not hide the structure itself, but let the audience experience the space in the premise of knowing that it is a mirror device, to enhance the sense of contrast and shock.
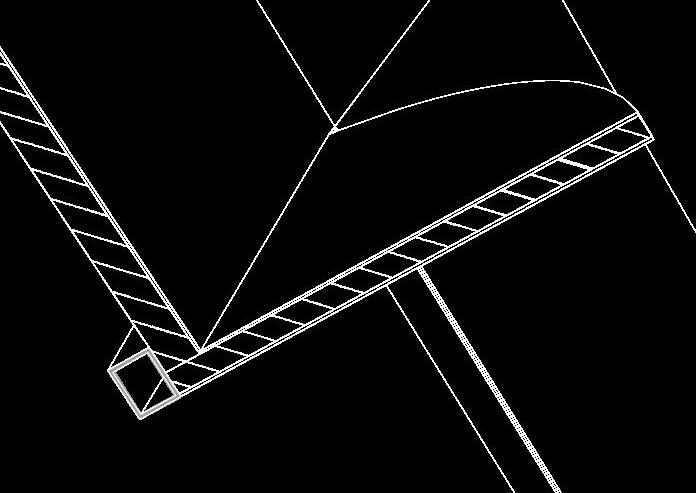
Like the design itself, the structure was designed for simplicity. Custom-made bending steel tube is designed to bear tension. Its accurate curve also ensures accurate construction. The wood bears the pressure and also acts as the mirror's back panel. The main part of the mirror has only three specifications, using laser engraving method of mass production. Part of the structure is buried underground to ensure stability. The shape of the ground inside is part of sphere, so that it is reflected multiple times to create the image of a planet.The entrance is designed to minimize its presence on the "planet", so it is placed in the corner. Such an entrance



Urban Co-Living: Community Evolution
Collaborate: Mengke Li, Baoky Kingyang Huang
Location: A Park to the South of Central Academy of Fine Arts, Beijing, China
Duration: 6 Weeks
Summer 2017
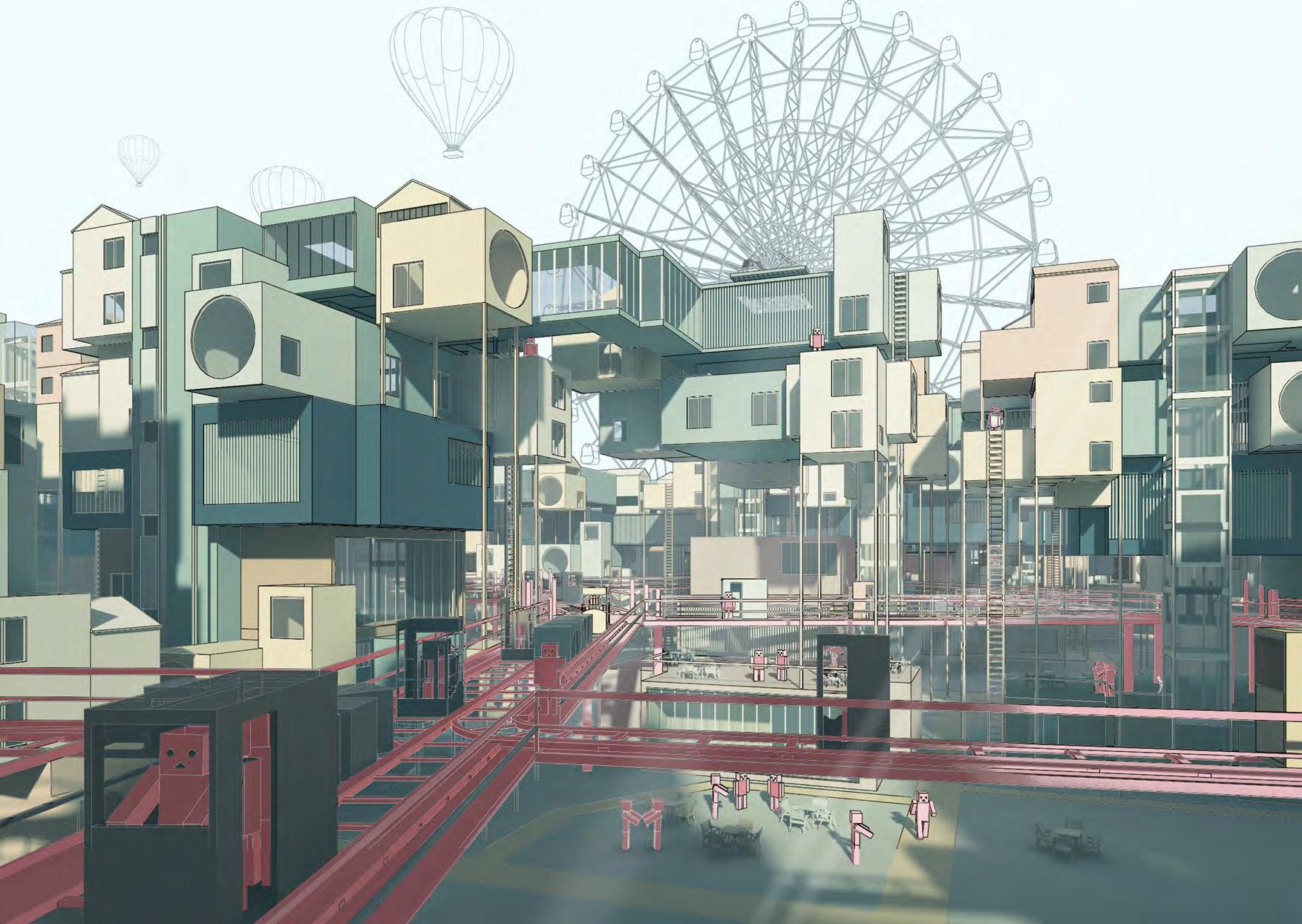

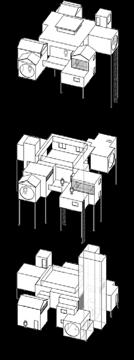
If human and architecture form a system of dynamic change, what would a community that can evolve and iterate be like? In this design, the concept of community inspired me a lot. The feedback regulation and balance relationships formed in the community maintain the stability and promote its evolution. When I go around Beijing, I am always fascinated by what the residents have done to their buildings. Though these illegal constructions have since been cleared and restored, people will always miss the dynamism of them. So in this design, architects are no longer the rulers of God's vision. We encourage users to be creative and make changes to the environment they live in, just like in Minecraft.
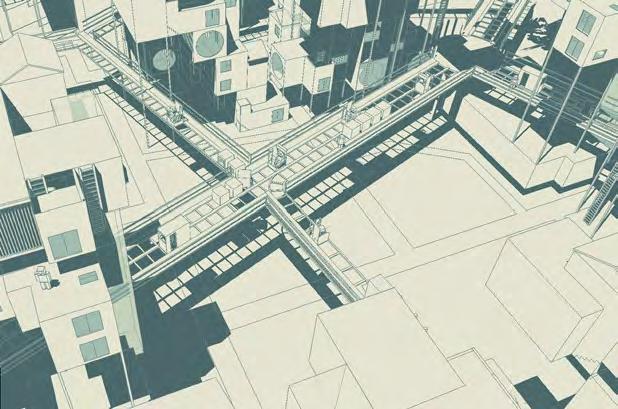
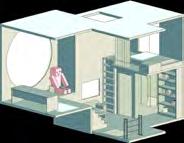
Continuous networking and face-to-face communication are required, as society has transitioned to base more on digital customization. Terms like “innovation” no longer belongs to a specific group of people. We are at an era where each individual blooms with creativity. Our proposal my.cube was developed to reflect upon this. We are looking for a model that is centered by and focuses on each individual, but has the power to encourage co-creating; A model that would bring architecture, community, and city into closer alignment with the new social need and desire that is happening at the moment. Placed at a park to the south of Central Academy of Fine Art, my.cube is orientated towards newly graduates, upcoming artists and art enthusiasts. my.cube provides shared spaces for living and networking, but also features unique facilities such as design studios, exhibition halls, and a “railway device”, all serving as public spaces for communication. This is a three-person cooperative work. The teammates are Mengke Li, Jingyang Huang and me. I participated in the preliminary planning of the site. I also designed the private space and the groups.
PRIVATE SPACE



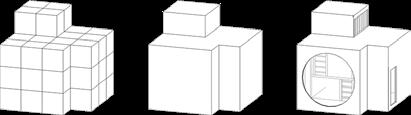
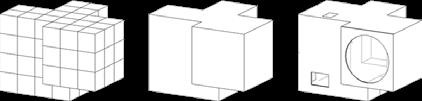
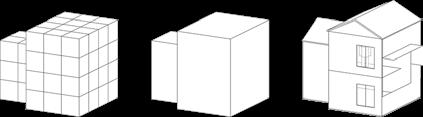
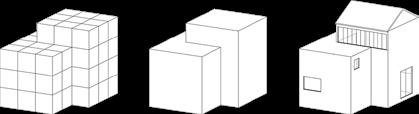
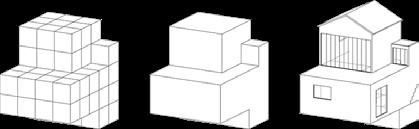
MODULES GROWTH AND TRANSFORMATION
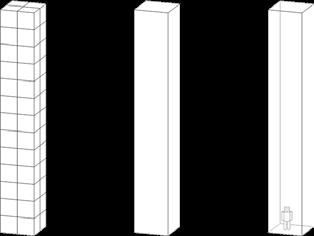
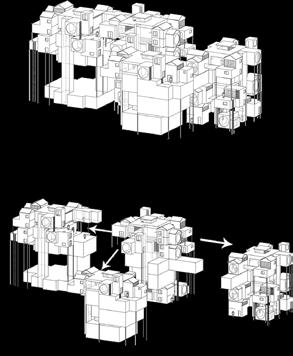
Each cube in the project acts as a module in the parametric system. It grows and transforms basing on the module 1.2 meters. Cubes are organized accordingly to align with individual needs. Yet a “designed lifestyle” is not what we are looking for. Therefore, we have given residents the liberty to design their own home by handpicking customized cubes and organizing them. Here, private construction is encouraged. It is precisely the possibility to design a bespoke home that makes the community so vivid. In this scenario, my.cube is the best instance of how each individuals’ creativity is shown while they all come together to form an organic community.
RE-DEFINITION AND RE-ORGANIZATION OF PROGRAMS
Upon reflection, the traditional way of seeing the programs is now out of context in the new society. After re-defining the flowability and privacy of the programs, we curate the community with three layers - units, clusters, and housing groups. Units provide individual with accommodation and workplace; A cluster is formed by units in addition to semi-private spaces for communication; A housing group consists of clusters and public spaces such as workshop, coffee shop and exhibition hall.






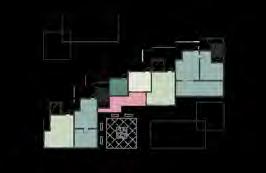
Housing groups are specifically designed for residents from different majors, and are spread over the site according to the pattern of Ursa Major to echo the star-marked plaza on site. Programs needed at dispersed times like convenient stores and manicure shops are considered flowable, while the programs that often functions in condensed time(restaurant, office, etc.) are considered fixed.
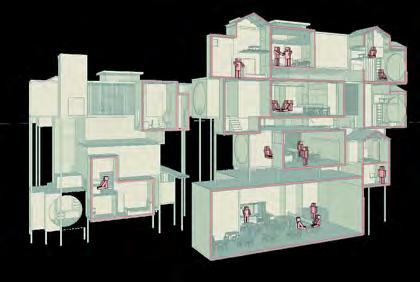

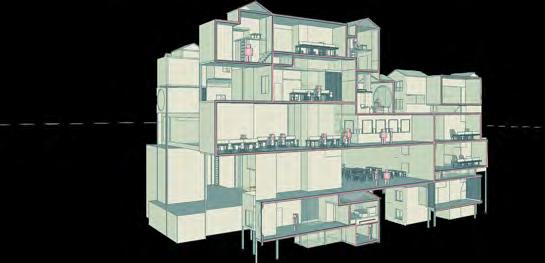


SECTIONAL PERSPECTIVE
ART ENTHUSIASTS
ART SCHOLARS, OFFICE WORKERS
PAINTERS,SCULPTORS, DESIGNERS
ARCHITECTS, URBAN PLANNERS, ARTWORK RESTORER
Traffic
EXPERIMENTAL AND BEHAVIORAL ARTISTS
Southward Daylighting
Vertical Traffic
ART ENTHUSIASTS
ART SCHOLARS, OFFICE WORKERS
PAINTERS,SCULPTORS, DESIGNERS
ARCHITECTS, URBAN PLANNERS, ARTWORK RESTORER
EXPERIMENTAL AND BEHAVIORAL ARTISTS







DIVISION OF THE SITE -INSPIRED BY ROMANTIC STARS
Although the residential groups are freely arranged, there is a track among them. Things like residential groups and orbital corner are nodes of the orbit. Just as random stars are connected by people with constellation patterns, these nodes are also connected by tracks. The tracks can promote communication between different groups and make the community more efficient.
DEPARTMENTS OF CENTRAL ACADEMY OF FINE ARTS
Ⅰ. College of Humanities
(Art Education, Art Management, Cultural Heritage, Foreign Art
Teaching and Research, Chinese Art History Teaching and Research, Art Theory Teaching and Research, Art History)
School of Art Management and Education
Continuing Education
Ideological and Political Theory Course Teaching Department
Graduate School
Ⅱ. Urban Design
(Urban Image Design, Urban Fashion Design, Urban Information Design, Foundation) Architecture
Restoration institute
Ⅲ. Chinese Painting
(Foundation, Murals, Sculptures, Prints, Oil Paintings) Design Institute
(Visual Communication, Digital Media, Photography, Jewelry Design, Fashion Design, Product Design, Vehicle Design)
NEW WAYS OF EXPERIENCING THE SPACE
Flowable programs will travel through the “railway device”to each cluster or housing group where it is needed. By taking flowable programs out of the clusters and housing groups, we create a community that is compact, communicative, and flexible.
Ⅲ. Chinese painting Plastic arts Design Institute
Ⅱ. Urban design Architecture Restoration institute
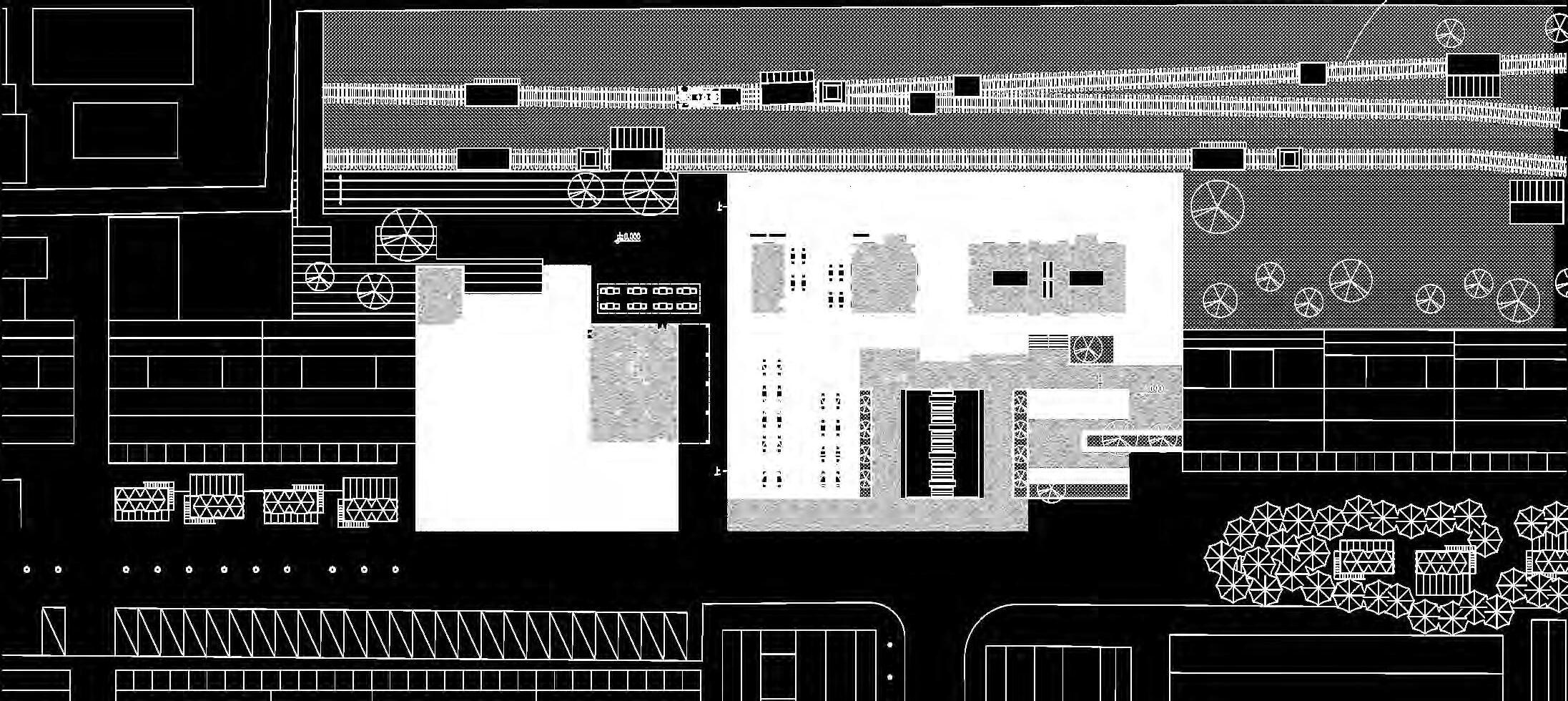
SITE PLAN COLLEGE OF HUMANITIES URBAN AND ARCHITECTURE PAINTING AND DESIGN RAILWAY DEVICE
Ⅰ. College of Humanities School of Art Management and Education Continuing Education Ideological and political theory course teaching department Graduate School
Plastic Arts
07 SONGKHLA STATION RENOVATION
Interactive Railway Park: Natural Selection and Site Evolution
Instructor: Maoyan Xu, Deyin Luo
Collaborate: Huaiying Fu, Kevin Ziyu Zhang
Location: Old train station of Songkhla, Thailand
Duration: 16 Weeks
Autumn 2019





and there is an airport in Hatyai.
1978-1985
Market around the station started. Chalerm-Thong theater opened.


warehouse, school and shop.





It will be renovate and extend to create an eye catching sign from






Present
A coffee shop with reading zone is opened in the station. The south square of the station becomes a parking lot.













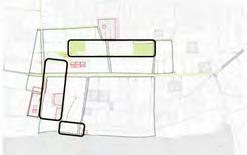
North Market Street: Currently used as a car park. Becomes part of the market and occupied by peddlers on Sunday.
South Market Street: Main fresh market and centre point of the weekend market.
Vacant Site: Vacant at present. We plan to change it into a platform and a performing square for the community.
Under Railway Community Space: Will be underneath the proposed new train station's track.


South Plaza Entrance: The connecting joint between Bonvua community and the old railway station site.

The railway has inspired the commercial activities around Songkhla Railway Station. The traders traveled here by train, gradually forming today's Sunday Market. This is the most distinctive characteristic of the site: hundreds of traders come to Songkhla every Sunday morning, and set stalls along the street under a unwritten tacit understanding, and leave at the end of the market. It is the railway station which created the business vitality here. Although the station is now closed, the tradition of Sunday Market remains, proving that this history is still remembered by the whole city.
The surrounding streets of the old train station are opened to traffic on weekdays, and occupied by market on Sunday. On the Sunday Market, the streets are full of temporary stalls and sunshades, selling food, clothes, jewelry and so on. Residents of both old and new parts of Songkhla all come here to shop. The Sunday Market has become one of the most important events in the city. We believe that it will play an important part in the future development of Songkhla
















1941 World War II
Songkhla old railway station changed to Japanese military because of the war strategy geography.
1985 Bon Vua Community was formed The market is still open and has a special market on Sunday. Chalerm-Thong theater was closed. New buildings are built around train station such as
1978 Songkhla Railway Station end of Service Songkhla old railway station was closed due to loss of money. People in that time use another transportation such as private car, public bus
King Rama V (1913-1978)
Songkhla Railway Station was opened Most of people travelling by train. The landscape was pine forest.
Overpass:
the main road.
Car Park:
A private car park opposite the old railway station.
Theater:
An abandoned theater next to the old railway station, currently occupied by peddlers.
Station: The Old Railway Station of Songkhla. Warehouse:
On south of the old railway station, connecting the station park and south entrance.
CITY SCALE ANALYSIS
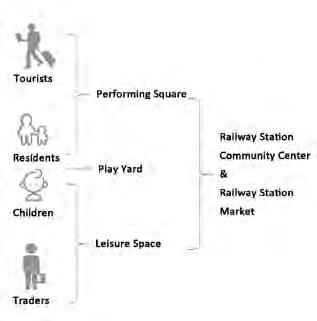
Current Needs Future Interaction Experience
People
Children—————Safe Playground
Current Residents————Leisure Space
Traders————Organized Market Space
Culture&History
Future ——— Tourists———Attractions Vibrant Market
Leisure Space
City Scale
[Old Station+BonVua+New Station]
Lack of Connect with Surroundings
Contrast of Vitality Between the Weekend Market and Weekdays
Other Problems
Traffic Problems
Unused Open Space
Amorphous Functions
Lack of Landmark and Particularity
Architectural Design Street Design
Make the Station a Cultural Symbol
Stress the Historical & Cultural Heritage
Improve Market Space
Public Space of High Quality
Connect Site with Surroundings
Improve Market Space on Street
Dredge Traffic & Arrange Parking Lots
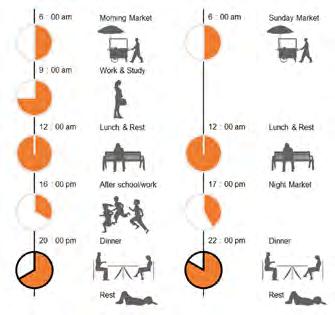
Usage at Different Times
Design:
A. Warehouse: Office & Workshop
B. Platform: Commercial space
C. Station: Café & Historical Exhibition
D. Garden: Cultural Hostel
E. Hall: Restaurant
F. Isles: Container Stalls
G. Overpass: Extended Space
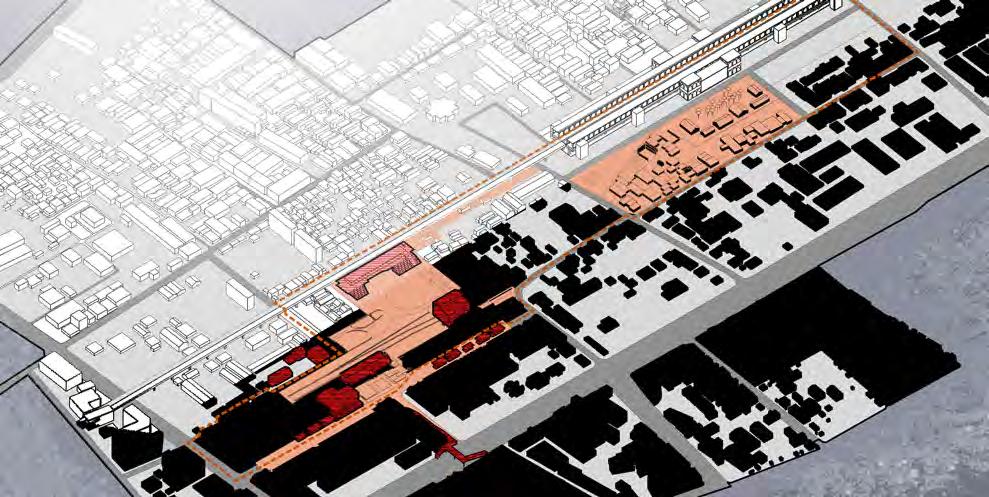
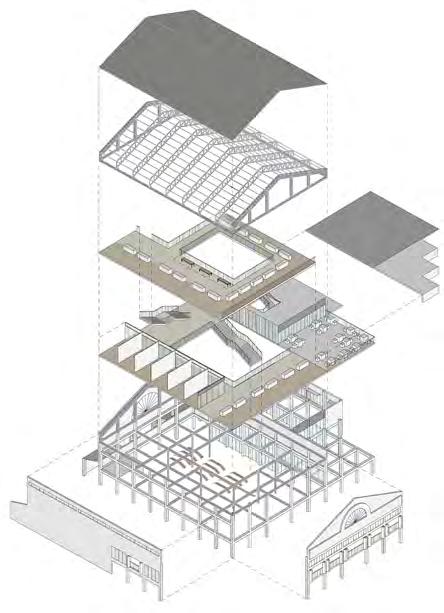
The site is located in the transitional area between the old and new Songkhla towns, with schools, markets, residential areas and a new train station in the south. The renovation of the site needs to take into account the needs of residents, children, businessmen and tourists. It should not only highlight the history and culture of the area, but also provide public space for residents, and create flexibility for the Sunday market. Basing on the current situation, we created more paths through the buildings, making the 1st floor more connected with the surroundings. The parking lot in front of the station is changed into a plaza with water and leisure space. Container stalls are set along the streets and on the railway to arrange the market space as well as stimulate interaction.

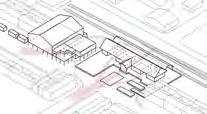

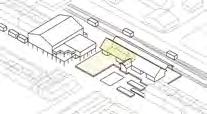

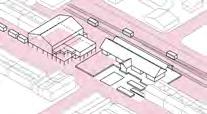








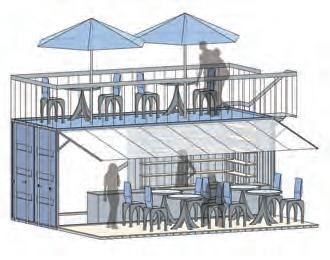
The movable containers on the tracks enable residents and tourists to interact with the railway. The container is an important element of the transport system, echoing the history of the site as a railway station. The functions include restaurant, water bar, bookstore, lounge space, landscaping and so on. They are recognizable, cheap to build and easy to modify. The containers form dynamic space that activates the open space on the tracks.
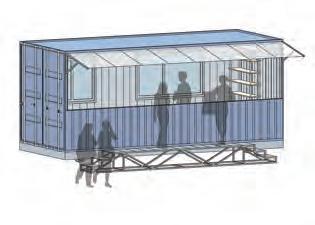




CONTAINER STALLS FOR MARKET
The market is crowded and lack of organization. Starting from this aspect, we set movable container stalls among the umbrellas, so that they can become landmarks helping people find their direction. You can also have a good view of the market and the huge amount of umbrellas on the second floor sitting area. On weekdays, the shops in the containers are still open to provide services for the surrounding residents and tourists.
We also redesigned the road by moving the parking space in front of the railway station to the north side of the theatre to ensure the quality of public space around the station. On the north side of the theatre, there is a walking street formed by the container stalls and the original buildings. The walking street connects with the shopping space inside the theatre.
At present the theatre contains several shops and some parking space. We call it a “hall” for it provides public space for gatherings and meetings. We keep the roof and the outer structure, place floorslabs supported by steel frames. On weekdays the first floor is empty to support public activities at any time. On weekends, pedlars come in and it becomes part of the market. The design is unobstructed and open. The stairs in the atrium lead people to higher shops with better views. On the dining platform you can also have a good view of the station and the plaza.



THEATRE EXPLOSIVE



STATION
Basing on the current situation, more paths are created through the buildings, making the first floor more connected with the surroundings. We change the parking lot in front of the station into a plaza with water and leisure space. On the two sides of the water, there are leisure space and an outdoor dining terrace. The terrace links to the café inside the station. On weekends the dining space changes into a platform for the market. By placing food stalls on the street, an inner walking path is created, leading to the current theatre and the plaza.
For the south part of the station, we make it an exhibition room of the history of the station. There are screens displaying the appearance of the site in the past. You can also see train tickets and other items on display. Technologies like AR and VR may also be used to perform the historical heritage of the site.
Leisure Place
Shops
Stalls
Historical Exhibition
Movable Container Stall
Container Stall
OTHER WORKS
01 INTERACTIVE FITNESS COACH







Instructor: Danqing Shi
Collaborate: Yuqi Yao, Jie Shang
Duration: 16 Weeks
Spring 2019
"Interactive Fitness Coach" is an intelligent interactive fitness application, in which virtual coaches demonstrate and guide users' fitness movements. It includes the interaction of body sensation, gesture recognition and correction, humanized language stimulation, acousto-optic control, data-based comment guidance and multi-user experience.
On the screen in front of the user is a robot coach named Sophia. She leads the users to carry out fitness trainings with personified voice and movement, pays attention to the fitness status of each user and gives timely feedback and communication.
INTERACTIVE FEATURES
In order to motivate the students, Sophia will demonstrate the moves and lead the movements. At the same time, she evaluates, rewards and punishes according to movement recognition, and gives personalized evaluation according to the standard degree of movement. Sophia is able to distinguish the students in front of her. Her anthropomorphized behavior combined with ambient lights and music enhances the user's interactive experience.
Spontaneity helps personalize the virtual coach. Given the state of the art, some spontaneous behavior can be preset to make Sophia's behavior more vivid. The mechanism of change is complex, but as developers we can anticipate the possible situations and give the robot a basic ability to respond. Such as situations that can disrupt your workout, or potential bugs in your system.
Users can ask questions by calling for "Sophia" or raising their hands. Because the topic is too many, so choose to predict the content of the communication. When a user asks a question, Sophia presents a multiple choice question, which is our estimate of what is likely to be required.
TECHNICAL IMPLEMENTATION
Motion recognition was carried out using Microsoft Kinect V2.0 motion-sensing camera. Considering the limitations of Kinect's field of view Angle and the requirements of aerobics' standing position, the number of users in the scene is 2, and only one Kinect and one PC host are used.
According to the user identification requirements sorted out by the interactive logic process, we extracted the key features of the actions to be recognized, and realized the action recognition by judging the relative positions of the key points of the human body, such as straddling feet, squatting down, lifting legs, etc. The recognition function is packaged as a separate module and integrated in Unity.
MOVEMENTS OF SOPHIA
02 CINEMA 4D UNDERWATER WORLD
Underwater City Video: https://vimeo.com/792577269
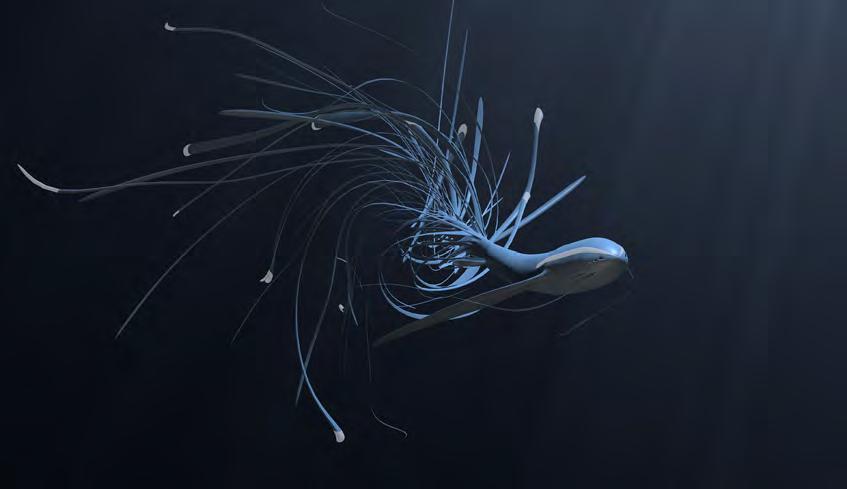
Underwater Creature Video: https://vimeo.com/792578579
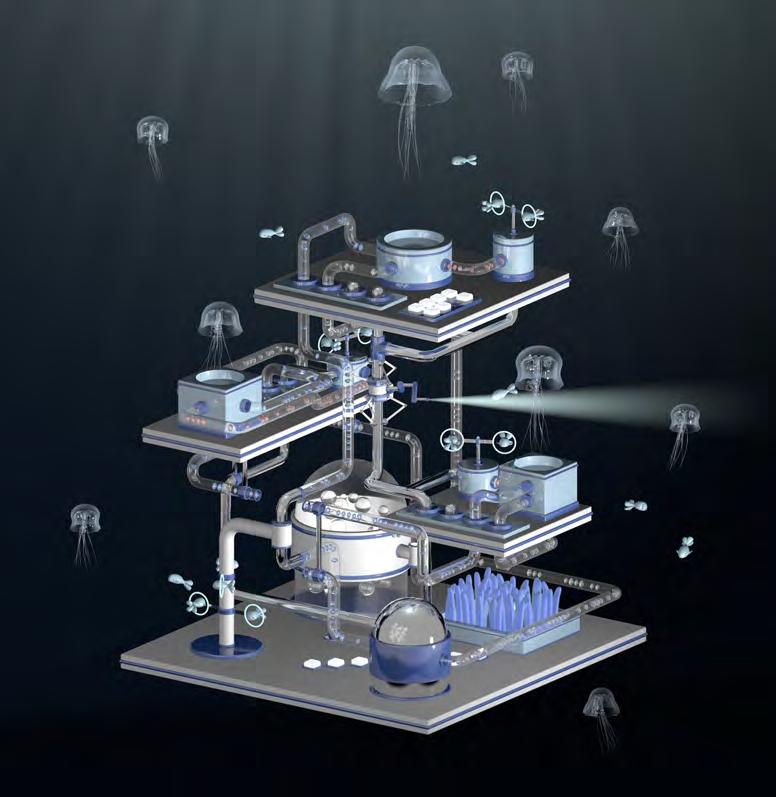
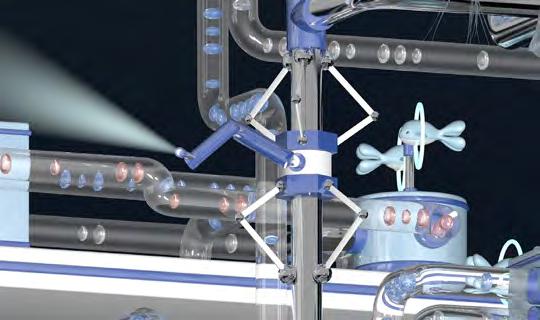
This is an underwater city with 10m×10m grid. It's not only a habitat for sea animals, but also a factory where fishes generate energy to support jellyfishes. There are different units on the floating platforms. The large platform on the ground floor has a coral reef, two base stations to extract material and energy, and a hub to control pipe connections. The other three platforms carry different units with filtration, engine and energy output functions. There are also buttons on the bottom and top platforms that show the state of the machine. A mechanical spider climbing on the metal tube looks around and observes everything in the city.The organization of tubes is determined by the type of material transported in it. The white bubbles represent matter, the orange bubbles represent energy generated by fishes through the engine, and the blue bubbles represent energy from the deep sea. All tubes are well fixed to the platforms.
Fishes come out of the reef and use the hula hoop to start the machines. Energy and matter flow out of the stations, through the tubes and eventually to the jellyfish through energy output units. The whole process is like a ritual, with the energized jellyfish swimming around the platform or leaving the city to deep sea.



04 STAGECRAFT
Instructor: Michael Wagner
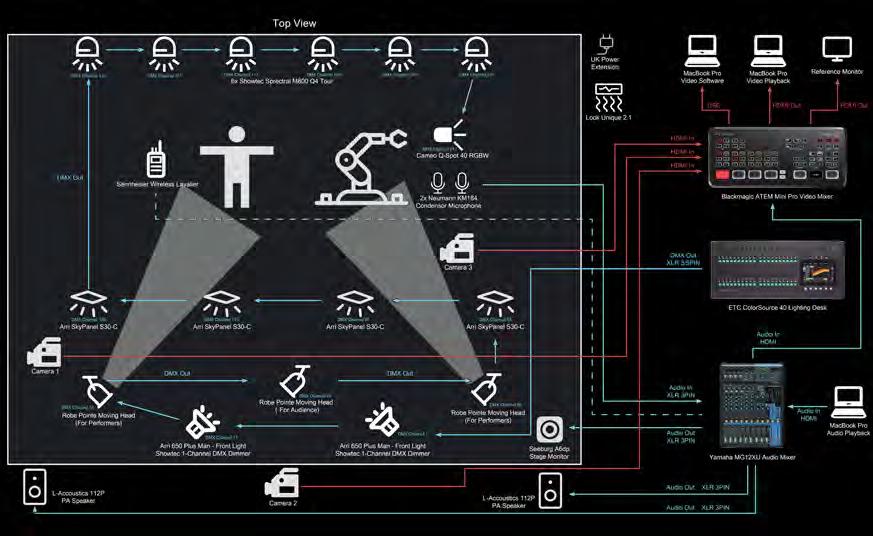
This is the setup for an interactive performance on a theatre stage of 8mx6mx6m(width,depth,height). There are two performers on stage, one human performer and one robotic performer.
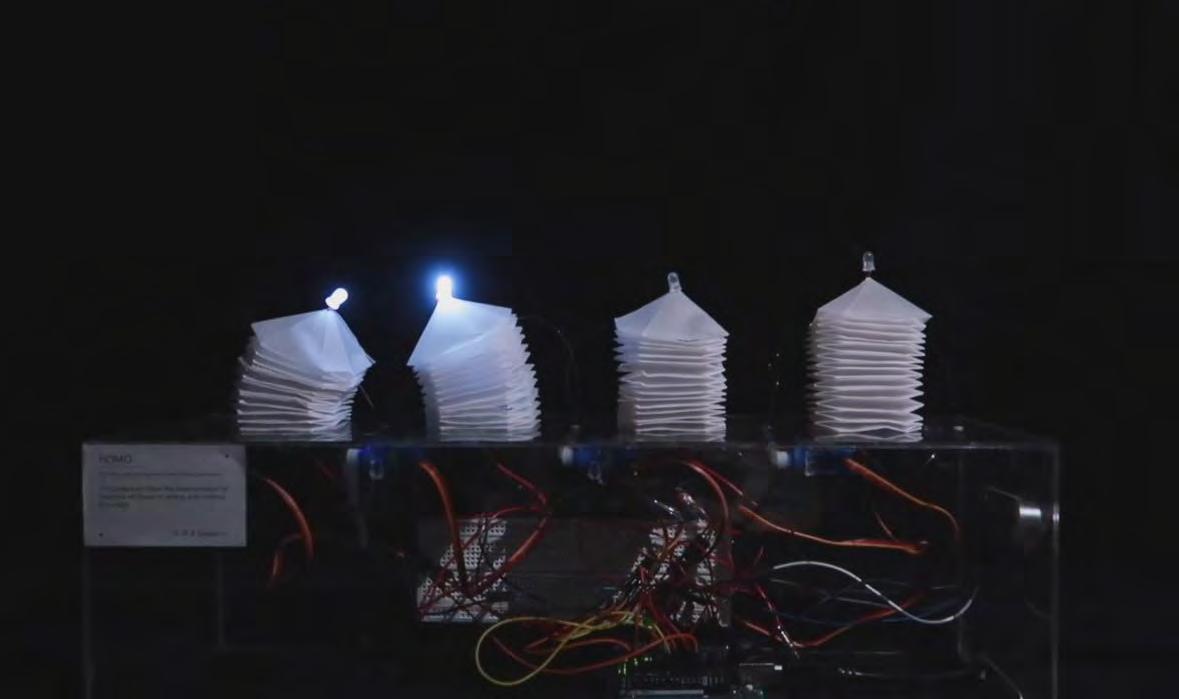
05 HOMO
Instructor: Ruairi Glynn, Parker Heyl
Collaborate: Saiyuan Li
This is a design work completed in four days. It contains a group of origami creatures that pass on light from one to another by bending themselves.
Project Film: https://vimeo.com/792557631
Work Process Video: https://vimeo.com/792557716
OTHER WORKS
06 MICRO FILM : THE PATRONUS TRILOGY
The Patronus Trilogy are three micro films shot for the Student Festival of the School of Architecture of Tsinghua University. I acted as producer, screenwriter, director, cameraman, main actor, editor and post-production compositor. These three films relate to the daily life of architecture students .
Shot in 2017, U Glue Man is the first film in the Patronus Trilogy, and most of the settings for Patronus was designed during the writing of this film. The keynote of the micro film is to make high density laughing points in the serious plots. Combined with the video special effects that I was not familiar with at that time, the micro film launches the discussion on life, emotion and fate in the playful scold.
link: https://www.bilibili.com/video/BV1gx411572W/
Picking up where the first series left off, SU Man is about how an ordinary people becomes a patronus. After experiencing the cycle of life and death, the main character finally understands the mission of the Patronus and makes a conscious effort to become a real Patronus to guard the architects.
link: https://www.bilibili.com/video/BV1jt411D7vN/
If U Glue Man is about love and SU Man is about the meaning of struggle, then Street View Man is a micro film about parting and memory. I also wrote the theme song How I Want to See You Again for the third micro film, because the film was shot in 2019, the last year of my undergraduate study. Compared with the comic tone of the previous two micro films, this film is more lyrical and thought-provoking.
link: https://www.bilibili.com/video/BV1mJ411z7Mm/
07 MUSICAL WORKS
A Dream in Ten Years link: https://vimeo.com/528389376
The theme song written by Qi Qi for the Student Festival in 2017 of the School of Architecture of Tsinghua University.
The Milky Way Train link: https://vimeo.com/528391996
The theme song for the Student Festival in 2019 of the School of Architecture of Tsinghua University.
How I Want to See You Again link: https://vimeo.com/528392684
The theme song written in 2019 for micro film Street View Man of the Patronus Trilogy
Cyber Dream link: https://vimeo.com/792596566
Isaac's Dream link: https://vimeo.com/792600207
Two pieces of theme music written in 2022 for Have We Met? Project Film and Design Thesis Film.


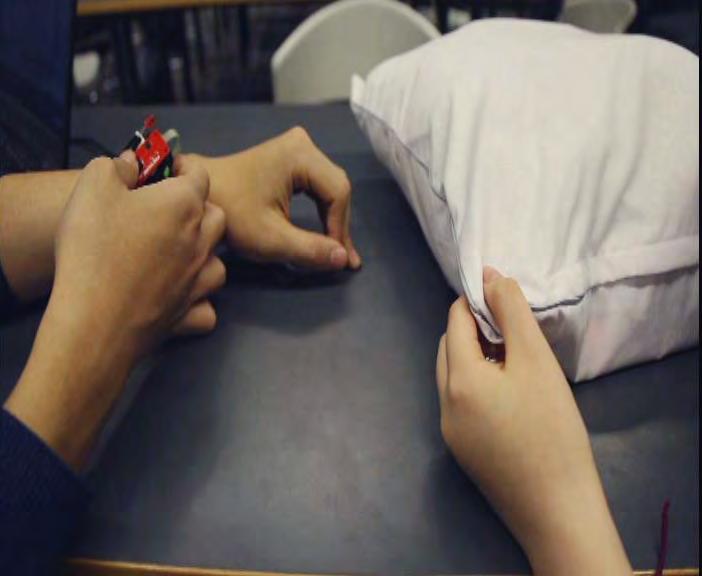
08 BREATHING PILLOW


This is a bold attempt of remote human interaction, suitable for long distance relationship or idol fans group. In this interactive project, I hope to explore more about the tendency of Eastern cultures to express emotions implicitly and passionately. We have designed the pillow and the relative application. Every breath of this pillow is connected to someone faraway with a bracelet to collect data. It feels like lying in the arms of each other when you embrace it. The temperature control system can be used to simulate the temperature of the user's lover or idol. There are also display lamps for simple communication.