
Universidad Nacional de Asunción
Facultad de Arquitectura, Diseño y Ar te Centro de Investigación, Desarrollo e Innovación
Atlas Urbano Py 2.0
Guía de Mapeo con Sistemas de Aeronaves Pilotadas a Distancia
Julia Lucia Oporto Rodas
Trabajo Final de Graduación, Modalidad de Pasantía (TFG-P)
2023
Presentación
La presente guía es un producto del Trabajo Final de Grado de modalidad Pasantía (TFG-P), de la Univ Julia Lucia Opor to Rodas, realizado para optar por el título de Arquitecta de la Facultad de Arquitectura, Diseño y Ar te de la Universidad Nacional de Asunción (FADA-UNA). La pasantía se realizó en el Centro de Investigación, Desarrollo e Innovación (CIDi-FADA), en el marco del proyecto Atlas Urbano Py (AUPy) y con tutoría a cargo del MSc. Arq. Juan Carlos Cristaldo y la asistencia metodológica de la Prof. Arq. Sofía Cazal y el Prof. Lic. Augusto Estigarribia.
Septiembre, 2023
2
Índice Presentación................................................................................................................... 2 Índice............................................................................................................................... 3 Glosario........................................................................................................................... 4 1. ¿Qué voy a encontrar en la guía?.................................................................................. 5 2. Objetivo General.......................................................................................................... 6 3. Pruebas Piloto - Conclusiones.................................................................................... 6 a. Conclusiones....................................................................................................... 6 4. Leyes y Reglamentaciones......................................................................................... 8 5. Paso a paso para el mapeo con sistemas de aeronaves pilotadas a distancias........ 9 a. Pasos Previos...................................................................................................... 9 b. Planificación de vuelo y proceso de fotogrametría aérea con el RPAS DJI Phantom 4 RTK...................................................................................................... 10 i. Planificación de Vuelo Programado en gabinete. Creación del Polígono KML en Google Ear th y carga del KML al control del RPAS.............................................. 10 ii. Proceso de Fotogrametría aérea con el RPAS DJI Phantom 4 RTK................. 15 6. Generación de ortofotografías y modelos 3D texturizados en WebODM.................. 32 ¿Qué es WebODM? Instalación y características del software 32 a Instalación y características 32 Pasos Previos 34 a Descargar las imágenes desde la aeronave a la computadora 34 b. Abrir WebODM desde Docker Desktop........................................................... 36 Producir una Or tofotografìa Rápida........................................................................ 39 Producir una Or tofotografía de Alta Resolución...................................................... 43 Producir un Modelo 3D Texturizado Rápido 49 Producir un Modelo 3D Texturizado de Alta Resolución 52 7. OpenAerialMap................................................................................................................. 57 Cargar Or tofotografías a OpenAerialMap................................................................ 58 Vincular OpenAerialMap con JOSM.................................................................................... 64 8 Recomendaciones 71 Referencias................................................................................................................... 72 3
Glosario
● AUPy: Atlas Urbano Py.
● CIDi: Centro de Investigación, Desarrollo e Innovación
● DJI: Da-Jiang Innovations
● FADA: Facultad de Arquitectura, Diseño y Ar te.
● GCP: Ground Cation Satellite System o Sistema Global de Navegación por Satélite en español.
● GSD: Ground Sample Distance o Distancia de Muestreo del Suelo en español
● OAM: OpenAerialMap.
● ODM: OpenDroneMap.
● RPA: Remotely Piloted Aircraft o Aeronave Pilotada a Distancia en español.
● RPAS: Remotely Piloted Aircraft System o Sistema de Aeronave Pilotada a Distancia en español
● RTK: Real Time Kinematic o Cinemático en Tiempo Real en español.
● TFG-P: Trabajo Final de Grado de modalidad Pasantía.
● UNA: Universidad Nacional de Asunción
● WebODM: WebOpenDroneMap
4
1. ¿Qué voy a encontrar en la guía?
Esta guía está elaborada con el propósito de definir los procedimientos para la realización del mapeo con sistemas de aeronaves pilotadas a distancia (RPAS), también conocidos como drones. En la misma, se describe en detalle todo lo que conlleva la realización de un mapeo de áreas urbanas utilizando el RPAS DJI Phantom 4 RTK. Se relatan los pasos, que van desde la planificación del vuelo en gabinete, la realización de fotogrametría aérea con el RPAS en campo, hasta la generación de or tofotografías y modelos 3D texturizados en WebODM. Se incluye además una sección sobre la utilización de la plataforma OpenAerialMap1
Esta guía no busca definir y detallar una metodología única para la realización de mapeos con RPAS, sino que reúne las mejores prácticas en el uso de técnicas y tecnologías que fueron aplicadas por la autora durante el desarrollo del proyecto, lo que constituye una sistematización de lo aprendido a par tir de la práctica.

1 “OpenAerialMap” https://openaerialmap org/ 5
2. Objetivo General
Esta guía describe los pasos y procedimientos para: (i) la realización del mapeo con sistemas de aeronaves pilotadas a distancia, (ii) la generación de or tofotografías y modelos 3D texturizados, y (iii) la utilización de la plataforma OpenAerialMap.
3. Pruebas Piloto - Conclusiones
Se realizó una serie de pruebas de vuelo en el campus de la UNA con el RPAS del CIDi un DJI Phantom 4 RTK ,lo cual permitió ganar conocimiento y experiencia práctica en el uso del instrumento, además de brindar insumos fundamentales para formular conclusiones acerca de todo lo que conlleva la realización del vuelo.
En total se realizaron 7 vuelos entre septiembre de 2022 y abril de 2023 En los mismos se exploraron los procedimientos y configuraciones para la realización de fotogrametría aérea 2D y 3D.
a. Conclusiones
Gracias a estas pruebas se tuvo un mayor entendimiento del rendimiento de la batería y del gasto energético teniendo en cuenta el área de sobrevuelo, la altura, el porcentaje de superposición ver tical y horizontal de las fotografías, y el ángulo en que debe estar la cámara para obtener un mejor resultado. A par tir de estos datos se logró establecer parámetros para un rendimiento de vuelo
óptimo Un vuelo óptimo se define aquí como aquel en el que con una batería con carga completa se puede desarrollar un plan de vuelo al 100%.
Los parámetros se establecen según la modalidad de fotogrametría aérea a realizarse, formulando las siguientes propuestas:
i. Fotogrametría 2D (Grilla Simple):
Área de vuelo máxima 20 ha, altura 90 a 100 m, superposición horizontal y ver tical: 70%, ángulo de cámara a 90°. Con las fotografías obtenidas en esta modalidad se realizan las or tofotografías
6
Área de vuelo máxima. 8 ha, altura entre 80 a 60 m, superposición horizontal y ver tical: 85%, ángulo de cámara a 45° Con las fotografías obtenidas en esta modalidad se pueden realizar los modelos digitales de terreno y modelos 3D texturizados.

 ii. Fotogrametría 3D (Grilla Doble):
ii. Fotogrametría 3D (Grilla Doble):
7
4. Leyes y Reglamentaciones
Estas son las normativas a tener en cuenta para realizar cualquier vuelo con una aeronave pilotada a distancia o drone sobre el territorio nacional
Ley N° 1.860/02. Código Aeronáutico de la República del Paraguay. Título II, De la Jurisdicción y Competencia. 7 de enero de 2002
Ar tículo 7 dispone: “Compete a la Autoridad Aeronáutica Civil la aplicación en el ámbito administrativo de las disposiciones de este código y de las demás normas jurídicas relacionadas con la aeronavegación, así como la regulación, fiscalización y control de las actividades, infraestructura y ser vicios inherentes a la aeronavegación, la investigación de incidentes y accidentes aeronáuticos y la sanción de las faltas”.
Resolución N° 2 170/2017 Por la que se aprueba el Reglamento DINAC R 1103 -
Reglamento de Aeronaves Pilotadas a Distancia (RPA) y Sistema de Aeronaves Pilotadas a Distancia (RPAS). 21 de noviembre de 2017
En el reglamento de la Dinac R 1103, se establecen los requisitos generales para la operación de las aeronaves pilotadas a distancia (RPA) y sistemas de aeronaves pilotadas a distancia (RPAS) sobre el territorio de la República del Paraguay
8
a. Pasos Previos
Para que el vuelo con el RPAS DJI Phantom 4 RTK sea exitoso hay que tener en cuenta los siguientes aspectos:
- Definir el área de vuelo con sus dimensiones
- Realizar la solicitud de vuelo a la Dirección Nacional de Aeronáutica Civil (Dinac) siguiendo lo establecido en su reglamento de Aeronaves Pilotadas a Distancia y a las autoridades per tinentes (gobernación, municipalidad, instituciones privadas o públicas, etc )
- Tener en cuenta la predicción del clima y de la velocidad de los vientos de los días que se deben realizar el trabajo, debido que si se presentan rafagas muy fuer tes no se podrá realizar el vuelo.
- Tomar en consideración la predicción de niveles de radiación UV, debido a que con niveles muy elevados, la aeronave no despega
- Realizar la planificación del vuelo en gabinete y prever cuántos vuelos se necesitan, dependiendo del tipo de resultado que se pretenda, ya sea un Modelo 3D del Terreno u Or tofotografía
- Para trabajar con el RPAS DJI Phantom 4 RTK, se debe crear una cuenta en la página de DJI, debido que, para realizar el vuelo, el firmware que viene instalado de fábrica en el control va a pedir que se acceda con su usuario Para crear una cuenta de DJI ir a https://www.dji.com/
- Asegurarse que la batería del aeronave y del control estén completamente cargadas.
5. Paso a paso para el mapeo con sistemas de aeronaves pilotadas a distancias.
9
- Comprobar que las hélices estén montadas correctamente y firmemente, y que se hayan inser tado la tarjeta MicroSD.
- Verificar que el gimbal y la cámara estén calibrados y funcionen con normalidad
- Cerciorarse que la aplicación DJI GPS RTK esté correctamente conectada al aeronave, permitiendo la comunicación entre la misma y la antena RTK
- Asegurarse de que los sensores del sistema de visión y el sistema de detección de infrarrojos estén limpios
b. Planificación de vuelo y proceso de fotogrametría aérea con el RPAS DJI Phantom 4 RTK
i. Planificación de Vuelo Programado en gabinete. Creación del Polígono KML en Google Earth y carga del KML al control del RPAS
1. Abrir Google Ear th y dibujar el polígono del área de vuelo. Teniendo en cuenta lo que se quiere estudiar, la cantidad de hectáreas que abarcará el vuelo, y el resultado que se busca. A continuación, compar timos los parámetros recomendados para realizar un vuelo con batería al 100%, considerando dos tipos diferentes de productos.
- Ortofotografías: área de vuelo máxima 20 ha
- Modelo 3D del Terreno: área de vuelo máxima 8 ha.
Obs : El área de vuelo puede ser mayor a la recomendada por cada carga de batería al 100% pero en este caso, el plan quedará inconcluso En esta situación se puede retomar el vuelo posteriormente, cambiando la batería agotada por una cargada o recargando la que se utilizó
10



11
2 Guardar el polígono como KML desde Google Ear th
3. Carga
La impor tación se realiza mediante la conexión del control de la aeronave al ordenador mediante un cable USB Para esto, el control debe estar encendido. Luego es necesario presionar
“TURN ON USB STOR AGE” para que la carga de archivos sea exitosa

Dentro de la tarjeta SD del control, se debe crear una carpeta que tenga el nombre DJI y dentro de esta, otra denominada KML. Se debe copiar y pegar el archivo KML del polígono de estudio en la referida carpeta.

12
Por último, hay que impor tar el archivo KML, al firmware del control para luego planificar el recorrido de vuelo en el polígono. Para realizar la impor tación dentro de la pantalla del control debemos ir al (a) icono de tarjeta de memoria, elegir la opción de


13
(b) KML Files, (c) seleccionamos nuestro polígono y finalmente, le damos en (d) Import.

14
ii. Proceso de Fotogrametría aérea con el RPAS DJI Phantom 4 RTK
1. Instalar la aeronave con su base de aterrizaje y despegue, y la antena RTK con sus accesorios en el punto de despegue. La t d b t i t l d l á lt ibl

15
2. Se enciende el control de la aeronave, se conecta a internet, normalmente desde un teléfono celular, y debemos conectarnos con nuestro usuario DJI. Para iniciar sesión, ir al icono de una persona que se encuentra al lado izquierdo de la pantalla Introducimos nuestros datos y la damos en Sign In.

3. Cargamos (a) el polígono KML del área de vuelo para armar el plan de vuelo

16
4. Al apretar (b) Start, se abre la pestaña del editor de plan de vuelo, y al darle Edit se presenta la pestaña para la elección del tipo de metodología para la realización de fotogrametría.
Se debe elegir el método de fotogrametría aérea teniendo en cuenta el tipo de resultado que se desea obtener. Las posibilidades son:
1a. Fotogrametría 2D: se utiliza para realizar Or tofotografías.

2b. Fotogrametría 3D (Grilla Doble): se utiliza para realizar modelos digitales del terreno

17
5. Al seleccionar la metodología más adecuada, en el mapa se dibujará la grilla elegida, siendo esta la ruta de vuelo que va a seguir la aeronave. En el menú de la derecha debemos ajustar los parámetros de altura, superposición de las imágenes, ángulo de cámara, velocidad de vuelo, etc. Estos parámetros dependen mucho del tipo de trabajo que realicemos, de la velocidad del viento y las condiciones climáticas del día del vuelo Una vez establecidos estos parámetros se debe presionar SAVE.
A continuación compar timos configuraciones recomendadas según el tipo de fotogrametría a realizar:
1a. Fotogrametría 2D (Grilla Simple): Altura (Height) 90 a 100 m, superposición horizontal y ver tical: 70%, ángulo de cámara a 90°
2b. Fotogrametría 3D (Grilla Doble): Altura (Height) entre 80 a 60 m, superposición horizontal y ver tical: 85%, ángulo de cámara a 45°
Independientemente del tipo de fotogrametría, debemos definir los parámetros que se describen a continuación:
(i) Primero definimos la Altura (Height) según la fotogrametría aérea a realizar y la Velocidad (Speed). En la mayor par te de los casos mantenemos el valor predefinido de Máxima Velocidad (Max Speed).
(ii) En Modo de disparo (Shooting mode) seleccionamos “TIMED SHOOTING”.
(iii) En Llegada (Finish) escogemos la opción “RETURN-TO-HOME” para que la aeronave retorne a la base una vez culminado el plan de vuelo
18
(iv) Por último habilitamos la opción de Optimización de Altura (Altitude Optimization).

(v) Entramos en el menú de Ajustes de Cámara (Camera Settings), primero seleccionamos la opción de Radio de la Foto (Photo Radio), seleccionamos el radio de separación entre fotografías, se recomienda mantener en 3:2 debido a que es el radio más pequeño. Luego cambiamos la opción de Balance de Blancos (White Balance) según la cantidad de luz que tengamos en el día y el índice UV. En Modo de medición (Metering mode) seleccionamos Promedio (Average), y en Ángulo de Gimbal (Gimbal Angle) colocamos el ángulo según el tipo de fotogrametría aérea que queramos hacer. Habilitamos la opción de Prioridad de obturador (Shutter Priority) para ajustar la velocidad del

19
obturador de modo a reducir la cantidad de tiempo que lleva tomar una imagen individual. Se recomienda 1000 como punto de par tida. También se habilita la opción de Corrección de Distorsión (Distortion Correction), y se da en SAVE para guardar los parámetros establecidos.


20
(vi) En el menú de Ajustes Avanzados (Advanced Settings) vamos a ajustar los parámetros de superposición horizontal y ver tical según el tipo de fotogrametría aéreas, en las opciones denominadas como “Horizontal Overlapping Rate” (Superposición Horizontal) y “Vertical Overlapping Rate” (Superposición Vertical).
Se mantiene la opción de “AUTO” en los Ajustes de Margen (Margin Setting). Al finalizar se presiona SAVE.

21
6. Vinculación con la Estación Móvil RTK. Primero, se enciende la antena RTK (dos toques cor tos y uno largo al botón).Luego en el mando del control se entra al menú de RTK. Para el tipo de ser vicio RTK, seleccione “D-RTK2 Mobile Station” Además de activar las opciones de “Aircraft RTK positioning” y “Maintain Positioning

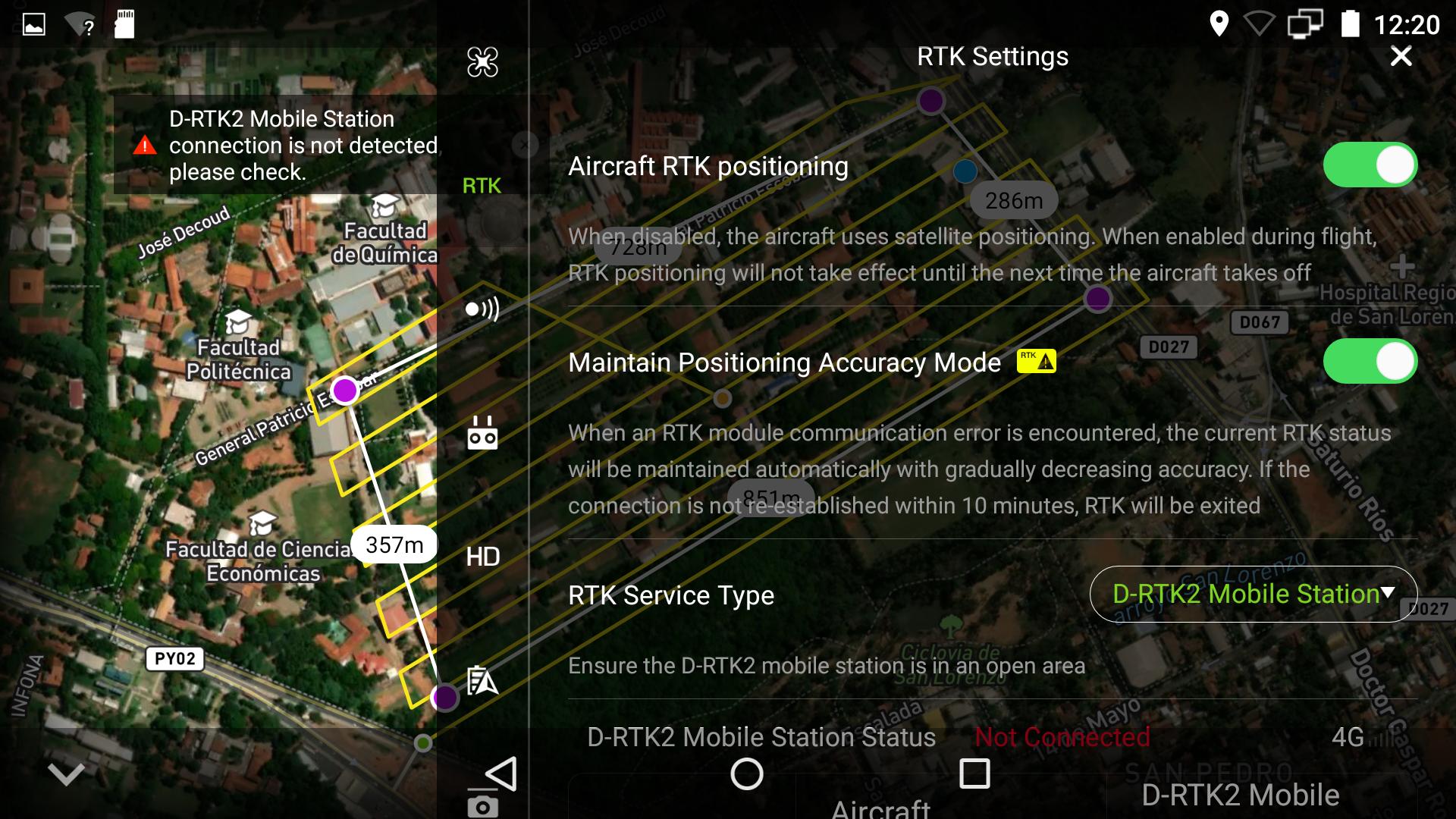
Accuracy Mode” para que la aeronave mantenga la posición de manera exacta
Haga clic en donde dice "Linking" en la par te inferior y presione el botón de enlace dando dos toques cor tos y uno largo, en la antena RTK. La misma debería comenzar a parpadear en rojo y verde rápidamente para indicar la vinculación
22

23
7. Vinculación con la aeronave. Primero, encienda la aeronave (dos toques cor tos y uno largo) y espere unos minutos hasta que complete. Para vincular el control con la aeronave, seleccione “link to aircraft” en la ventana emergente Con un bolígrafo o un pinche se debe apretar el botón de vinculación que se encuentra al costado de la aeronave



24
8. Despegue de la aeronave. Una vez enlazado correctamente la aeronave con el control y la antena RTK. Se presiona “Invoke” y luego a “Start”.

Va a salir una pestaña que da una serie de adver tencias que debemos tener en cuenta, damos en “Ok” Luego sale la pestaña de Autoverificación antes de ejecutar la tarea (Self-check Before Executing Task) Una vez que se ha realizado la verificación y que se encuentre todo correcto, (a) Deslizamos para ejecutar (Slide to Execute) y la aeronave levanta vuelo.

25


26
9. Durante el vuelo
(i) Se debe intentar mantener a la vista a la aeronave, por si se encuentra con alguna inter ferencia durante el vuelo.
(ii) Verificar siempre a través del control que el vuelo se esté realizando correctamente y sin problemas, mediante la transmisión de la imagen en directo de la cámara de la aeronave.

(iii) Mantenerse en movimiento constante para que el control no pierda la señal con la aeronave.
(iv) Obser var siempre en el control el estado de la batería de la aeronave y el porcentaje de desarrollo del plan de vuelo
En caso de encontrarse con una inter ferencia o se obser ve que la aeronave tiene problemas, se debe apretar el botón “home” que se encuentra en el control para que el aeronave retorne a la base de aterrizaje.
27

28
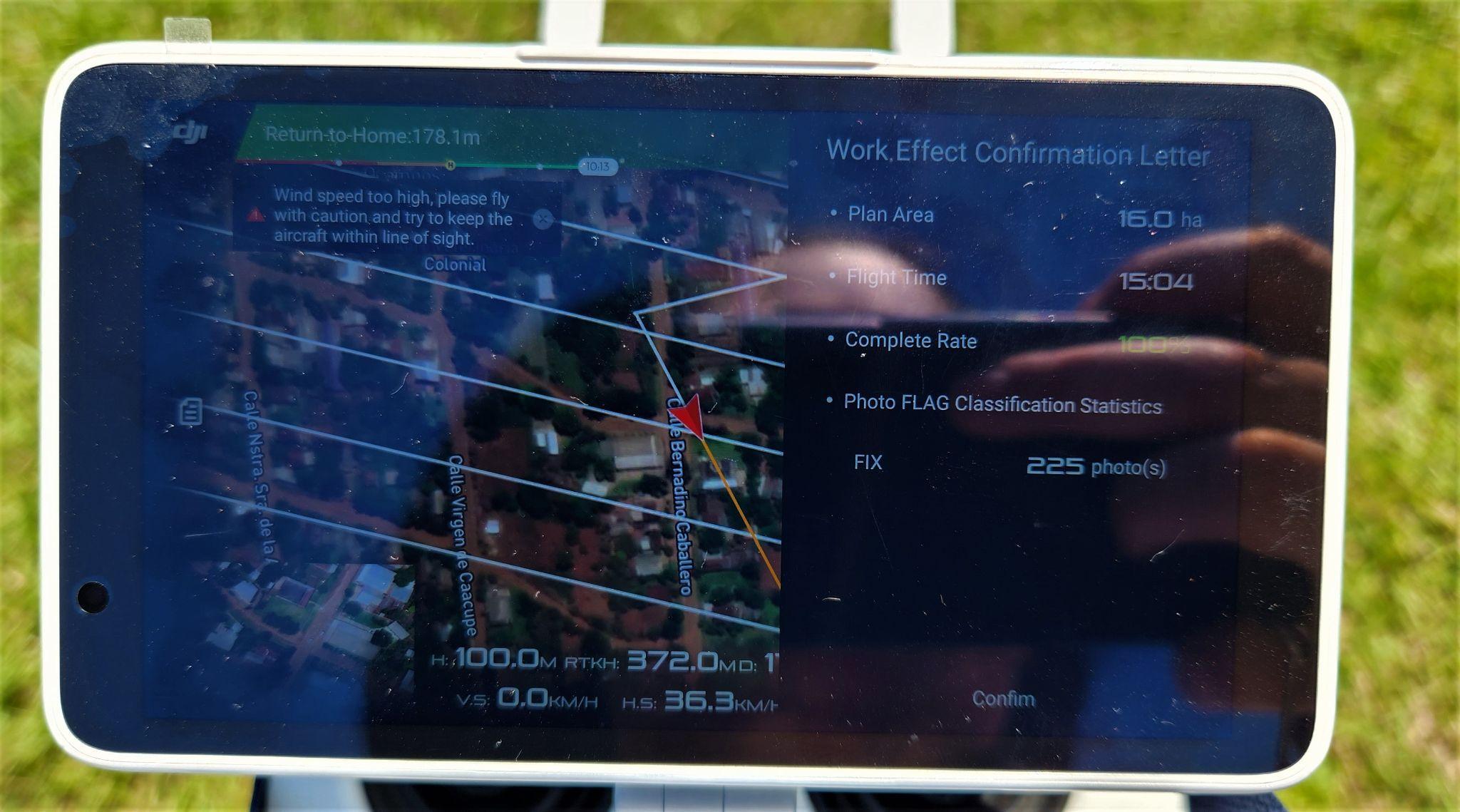
10. Finalización del vuelo
Vuelo Completo
Una vez completado el plan de vuelo al 100% la aeronave volverá a la base. Aparecerá una notificación en la pantalla del control donde se detalla el total del área sobrevolada, el tiempo que llevo completar el plan de vuelo y la cantidad de imágenes obtenidas.
11. Vuelos interrumpidos y retomar el plan de vuelo
Vuelos interrumpidos:
Diversas razones pueden llevar a que un plan de vuelo no culmine en su totalidad A continuación se citan algunas posibles causas se puede dar por diversas razones, como las que pueden ser:
(i) Falta de batería: la aeronave vuelve a la base de manera automática cuando se encuentra con un porcentaje menor a 20%.
(ii) Interrupción del vuelo por pérdida de señal con el control y la antena RTK, entonces la aeronave procede a volver a la base
(iii) Interrupción del vuelo de manera manual por inter ferencias de objetos, ondas electromagnéticas o el clima.
29
(iv) Interrupción por que se obser van problemas mecánicos con la aeronave, lo que resulta en que no se está realizando el vuelo de manera correcta,
(v) Otros problemas de mantenimiento, tales como que el sensor (cámara) no se encuentra en el ángulo correspondiente o está sucio, etc.
Retomar el plan de vuelo
Si un vuelo es interrumpido, el plan de vuelo queda guardado en la memoria del control con el punto geolocalizado en donde la aeronave tuvo que interrumpir el vuelo.
Es recomendable, que si se desea completar el vuelo, esto se realice lo antes posible, es decir, en el día o durante los días siguientes, sin perder mucho tiempo, para no tener mucha diferencia temporal entre las imágenes capturadas.
Para retomar el vuelo, solo hay que acceder al mismo desde el menú del control, seleccionando el primer (a) icono a la izquierda y accediendo a (b) “Executing” y (c) seleccionamos el plan de vuelo, el cual va a tener indicado el porcentaje de progresión de la operación

30
Se abre el plan de vuelo ya con todos los parámetros establecidos con anterioridad. Para que la aeronave tome vuelo solo hay que realizar el proceso de vinculación de la misma con la antena RTK y el control
Una vez completada la vinculación de manera correcta, para el despegue de la aeronave se siguen los mismos pasos que un plan de vuelo que se configura desde el principio
31
6. Generación de ortofotografías y modelos 3D texturizados en WebODM
¿Qué es WebODM? Instalación y características del software.

WebODM es una aplicación y API gratuita, fácil de usar y extensible para el procesamiento de imágenes de drones, en el que se puede generar mapas georreferenciados, nubes de puntos y modelos 3D texturizados de un objeto fotográfico (OpenDroneMap, s.f.).
Se puede descargar de manera gratuita desde la página web de OpenDroneMap2
a. Instalación y características
Para la instalación del software en Windows tener en cuenta los requisitos mínimos para ejecutar el software los cuales son:
- CPU de última generación
- 100GB de espacio en disco
- 16GB de R AM
2 https://www opendronemap org/webodm/download/ 32
- Se necesita al menos Windows 7 Versiones anteriores de Windows no están sopor tadas.
Se tiene una limitación de procesamiento en relación a cantidad mínima por R AM necesaria para procesar cier ta cantidad de imágenes
Tabla 1
Cantidad mínima de R AM necesaria para Número de imágenes.
Nota. Tabla traducida al español por la autora. Fuente: OpenDroneMap. Instalación y Guía de Introducción
También se deberán instalar herramientas de sopor te como Python, Git y Docker que son necesarios para ejecutar WebODM, ya sea si está utilizando el sistema operativo de Windows, macOS o Linux
Numero de Imagenes R AM o R AM + Swap 40 4 250 16 500 32 1500 64 2500 128 3500 192 5000 256
33
Para realizar la instalación de manera adecuada se puede consultar la Guía de Instalación e Introducción de OpenDroneMap3, como también la Guía de Instalación de WebOpenDroneMap4 realizada por el equipo de AUPy.
Pasos Previos
a. Descargar las imágenes desde la aeronave a la computadora
La descarga de las imágenes se realiza conectando un cable USB Tipo Micro entre la aeronave que debe estar encendida y la computadora.

Desde la computadora se accede a al directorio “DCIM > 100MEDIA” donde se encuentran almacenados las diversas carpetas que corresponden a cada vuelo, las que están identificadas de la siguiente manera
3 Guía de Instalación e Introducción de OpenDroneMap: https://docs.opendronemap.org/es/installation/
4 Guía de Instalación de WebOpenDroneMap del equipo AUPy: https://drive google com/file/d/1JI6j6I6Y6PaWSz9BQWbMa2wVf6zPs0L2/view?usp=sharing

34
“100 00xx”. Una manera de identificar la carpeta que corresponde a la fecha de vuelo realizado, es dando clic botón derecho “Propiedades” y se abrirá una pestaña en donde saldrá las especificaciones de la fecha y hora de creación elo de da que el nombre de esta carpeta tenga la fecha y el tipo de fotogrametría aérea realizada, por ejemplo “14-04-2023 Fotogrametría 3D” Hay que tener en cuenta que la computadora debe tener mucho espacio en el disco debido a que una carpeta que contenga imágenes capturadas por la aeronave ocupan mucho espacio en el disco, siendo frecuentes tamaños que van desde 500mb a 5gb o más.



35
b. Abrir WebODM desde Docker Desktop


Abrimos Docker Desktop, que se encuentra en nuestro escritorio.
Una vez abier to, damos clic en el icono (a) Start de la opción de WebODM , esperamos unos segundos a que todos los componentes se carguen
36
opción de Open in browser , e inicia la emulación de WebODM en el navegador. Si no funciona de esta manera se puede copiar y pegar el link

http://localhost:8000 directamente en el navegador para iniciar


WebODM
Iniciamos sesión con nuestro usuario, que creamos durante el proceso de instalación siguiendo los pasos establecidos en la Guía de Instalación de WebOpenDroneMap5 realizada por el equipo de AUPy
Una vez iniciada la sesión, aparecerá el tablero del área de trabajo para crear los proyectos de mapeo.
e s a
Le damos en “´+ Agregar Proyecto”. El proyecto, es donde van a estar contenidas todas las or tofotografías y los modelos 3D texturizados que vamos a realizar. En la pestaña emergente agregar los datos de nuestro proyecto y le damos en “+ Crear Proyecto”.


38
Producir una Ortofotografìa Rápida
i Damos clic en “Seleccionar imágenes y GCP”, seleccionamos imágenes desde la carpeta contenedora y le damos clic en “Abrir”.

ii. Se coloca el Nombre, se recomienda denominar de la siguiente manera “Área de Vuelo - Fecha - Tipo de Ortofotografía” ejemplo “Facultad de Agronomía - 12/4/2023 - Or tofotografía Rápida”. Se elige el “Nodo de Procesamiento” por “node-odm-1 (queue:0)”.
iii En “Opciones” elegir “Fast Orthophoto”
39
iv “Redimensionamiento de imágenes” seleccionar “Si” y redimensionar en el preestablecido “2048px”. a cargar al software, esto va a tardar unos minutos dependiendo de la cantidad de imágenes.


40



e e 41


Producir una Ortofotografía de Alta Resolución
i Damos clic en “Seleccionar imágenes y GCP”, seleccionamos imágenes desde la carpeta contenedora y le damos clic en “Abrir”.
ii Se coloca el Nombre Se recomienda denominar de la siguiente manera “Área de Vuelo - Fecha - Tipo de Ortofotografía” ejemplo “Facultad de Agronomía - 12/4/2023 - Or tofotografía Alta Resolución”. Se elige el “Nodo de Procesamiento” por “node-odm-1 (queue:0)”
43
a manual Lo recomendable utilizar estos parámetros o mayores:
- auto-boundar y: activar

- end-with: odm-or thophoto
- fast-or thophoto: activar
- feature-quality: high o ultra
- mesh-octree-depth: 14
-
mesh-size: 600 000
- or thophoto-resolution (float>0.0): 2
- pc-quality: high o ultra
Una vez seleccionados todos los parámetros, damos clic en Guardar.
44
iv. En “Redimensionamiento de imágenes” seleccionar “Si” y redimensionar en el preestablecido “2048px”.
v Dar clic en “Revisar” y luego “Comenzar a procesar” Las imágenes van a cargarse en el software. Esto tardará unos minutos dependiendo de la cantidad de imágenes.

45



6
vi Una vez cargadas las imágenes en el software, las mismas se redimensionan. Luego se cargan las imágenes al nodo del procesamiento y automáticamente se comienza a procesar la or tofotografía de alta resolución



47

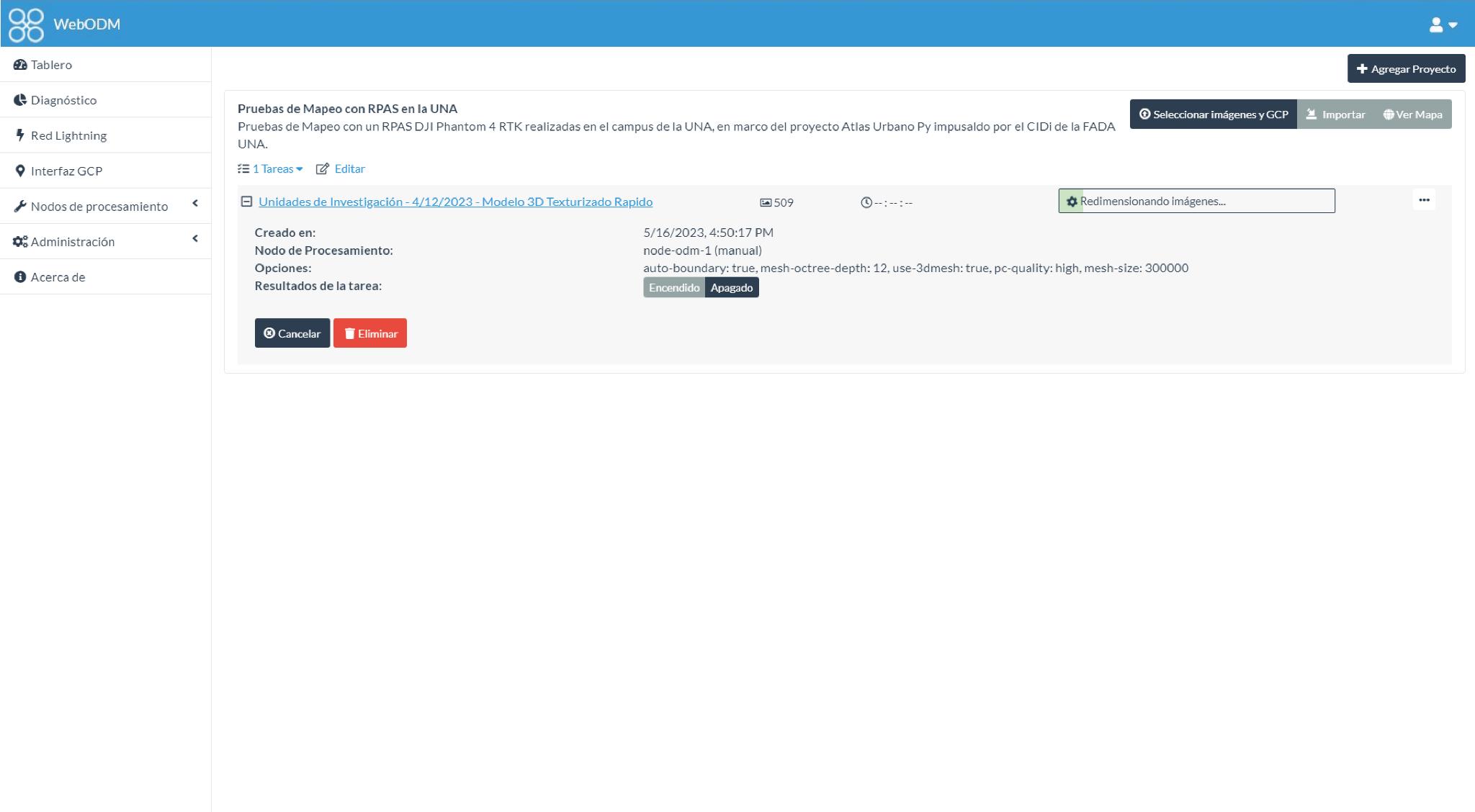
Producir un Modelo 3D Texturizado Rápido
i Damos clic en “Seleccionar imágenes y GCP”, seleccionamos imágenes desde la carpeta contenedora y le damos clic en “Abrir”.
ii. Se coloca el Nombre. Se recomienda denominar de la siguiente manera “Área de Vuelo - Fecha - Tipo de Modelo 3D Texturizado”. Ejemplo
“Facultad de Agronomía - 12/4/2023 - 3D Texturizado Rápido” Se elige el “Nodo de Procesamiento” por “node-odm-1 (queue:0)”.
iii. En “Opciones” elegir “3D Model”.
iv “Redimensionamiento de imágenes” seleccionar “Si” y redimensionar en el preestablecido “2048px”.
49


e a



n p 1
Producir un Modelo 3D Texturizado de Alta Resolución


i. Damos clic en “Seleccionar imágenes y GCP”, seleccionamos imágenes desde la carpeta contenedora y le damos clic en “Abrir”.

52
ii Se coloca el Nombre Se recomienda denominar al archivo de la siguiente manera “Área de Vuelo - Fecha - Tipo de Modelo 3D Texturizado”.
Ejemplo “Facultad de Agronomía - 12/4/2023 - Or tofotografía Alta Resolución” Se elige el “Nodo de Procesamiento” por “node-odm-1 (queue:0)”.
iii p p p a manual. Lo recomendable es utilizar estos parámetros o mayores:
- auto-boundar y: activar
- crop: 0
- debug: activar -
dem-resolution:1
- feature-quality: ultra
-
-
mesh-octree-depth:12
mesh-size: 600 000
- min-num-features: 20.000
- or thophoto-resolution: 2 -
pc-geometric: activar
- pc-quality: ultra
-
pc-rectify: activar

- use-3dmesh: activar
- verbose: activar
53
iv En “Redimensionamiento de imágenes” seleccionar “Si” y redimensionar a una calidad más baja, dependiendo de la cantidad de fotografías y de la capacidad de procesamiento de la computadora que se tenga, se recomienda ir probando desde 1440px a 720px.
v. Dar clic en “Revisar” y luego “Comenzar a procesar”. Las imágenes se cargarán al software. Esto tardará unos minutos, dependiendo de la cantidad de imágenes

54



o e 55

c o n 56
7. OpenAerialMap
Es una plataforma online de código abier to utilizada para buscar, compar tir y utilizar imágenes satelitales e imágenes obtenidas a par tir de aeronaves tripuladas a distancia (RPA) entre otros. Todas las imágenes tienen licencia pública tipo CC-BY 4.0 (atribución) y están disponibles a través del nodo de Open Imager y Network (OIN) del Humanitarian OpenStreetMap Team (OpenAerialMap, s f )
Se trata de un proyecto que busca crear una base de datos de imágenes aéreas de alta resolución, en donde usuarios de diferentes par tes del mundo, puedan compar tir sus or tofotos de manera gratuita y libre para el uso

57
Cargar Ortofotografías a OpenAerialMap
Finalizado el procesamiento en WebODM, las or tofotografías serán cargadas en la plataforma de OAM para ser almacenadas y que puedan ser accesibles para cualquier usuario interesado en ellas
i Crear una cuenta e iniciar sesión. Ir a https://openaerialmap org/ y dar clic en (a) Sign in


iii Se abre una ficha denominada “Upload Imager y” en donde se completan los datos de la or tofotografía y se realiza la carga:

Realizamos la carga de la or tofotografía a través de (c) Dropbox debido a que es la forma de carga más eficiente en la plataforma

59
Se abre una pestaña emergente en donde seleccionamos la
Obs : Las or tofotografías ya deben estar almacenadas con anterioridad en el repositorio correspondiente, ya sea Dropbox, Google Drive u otro, antes de realizarse el proceso de carga a OpenAerialMap.


60
Una vez seleccionada la or tofotografía, surgirá una caja con el link al repositorio donde está almacenada la carga y terminamos de completar los últimos datos de proveedor, etiquetas, contacto y licencia. Luego presionamos clic en (d) Submit

Obs : En este caso el proveedor es CIDi FADA UNA por que la or tofotografía se realizó en el marco de un proyecto impulsado por estas instituciones. Del mismo modo, también en las etiquetas se ponen las abreviaturas y siglas de los proyectos e instituciones

61
iv Al darle clic en (d) Submit se abre una ventana emergente Si le damos clic en (e) Check upload status nos abre una pestaña en donde podemos comprobar el estado en que se encuentra la carga de la imagen.


62
v Una vez cargada toda la or tofotografía aparecerá en la pantalla el mensaje STATUS = Finished y podemos dar clic en (f) View image para visualizar nuestra or tofoto ya cargada en la plataforma de OAM.


63
Vincular OpenAerialMap con JOSM

OAM tiene la ventaja de poder vincularse directamente con los editores de mapas de OpenStreetMap, como ID Editor y JavaOSM. Esto posibilita que las imágenes aéreas compar tidas en la plataforma sean utilizadas como imagen de fondo para realizar mapeos más precisos, en comparación a otras imágenes satelitales proveídas por OpenStreetMap.
i. Primero debemos abrir JOSM en nuestra computadora. Para que la vinculación se realice de manera correcta siempre debemos tener en cuenta que JOSM ya debe estar abier to con anterioridad.
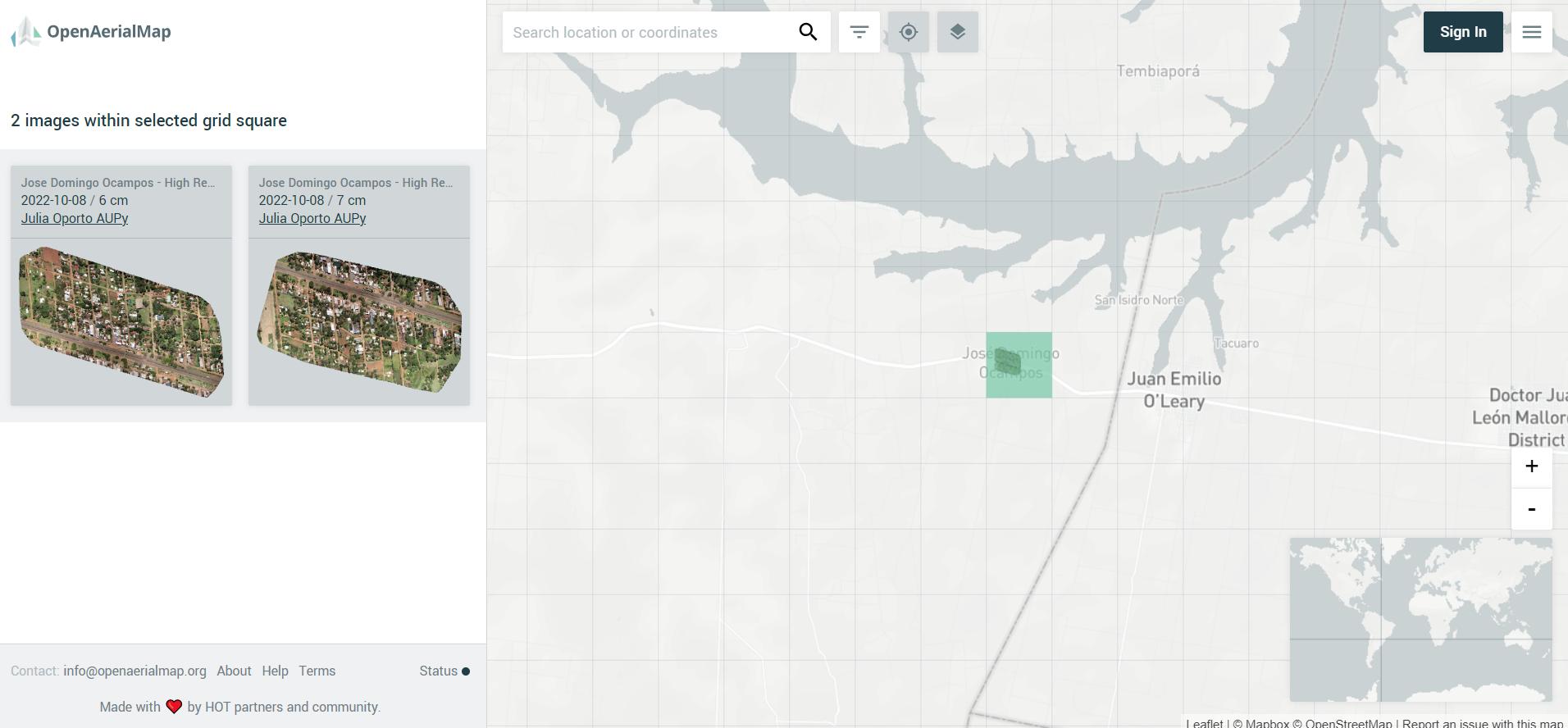
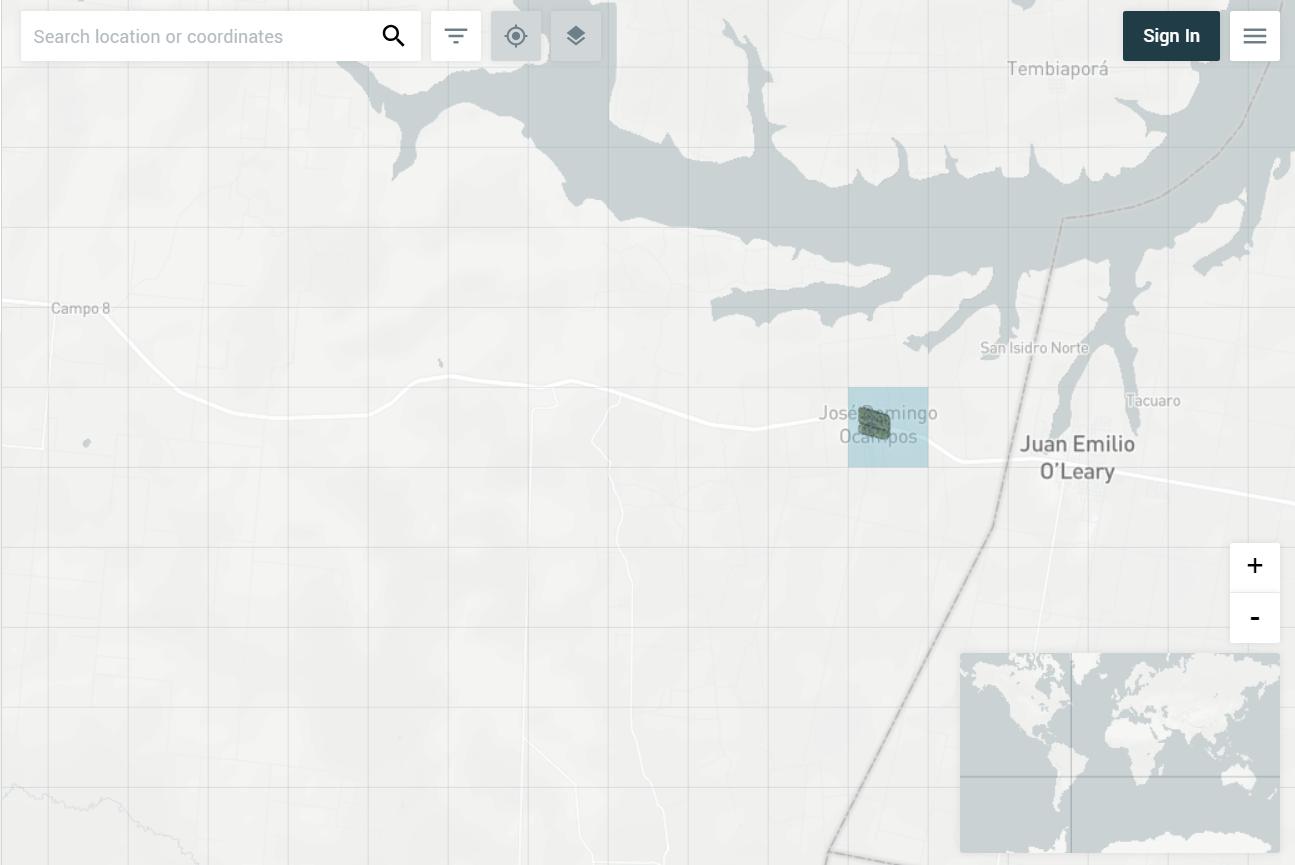
ii. Abier ta la pestaña de OAM, damos clic en “Start Exploring” en español Empezar a Explorar Se abre el mapa que está dividido en cuadros que muestran la cantidad de imágenes existentes por región, que podemos ir explorando.
64
iii. Con la rueda del ratón podemos ir haciendo zoom in o zoom out, en el mapa, acercándonos a la región de la cual necesitamos descargar imágenes Esto también se puede hacer con los símbolos de “+” y “” que se encuentran en la esquina inferior derecha de la pantalla.


65
iv. Damos clic sobre el cuadro donde se encuentra la imagen que deseamos usar de base para realizar un mapeo en JOSM. En la barra de menú a la izquierda nos salen las imágenes contenidas en esa área Damos clic sobre la imagen que deseamos utilizar y nos aparece geolocalizada en el mapa.
66
v. Una vez que aparece geolocalizada en el mapa, tenemos una barra de menú a la izquierda con diferentes opciones y los datos de la imagen.

Menú de opciones:
(a) es para descargar la imagen en formato tiff
(b) para ajustar la imágen a la pantalla
(c) salir de la selección de la imagen
(d) formato de muestra de la imagen en pantalla
(e) opciones para abrir en el ID Editor o JOSM
(f) copiar el URL de la imagen en formato TMS o WMTS para compar tir
Menú de datos:
(g) la fecha de toma de la imágen
(h) resolución en relación al tamaño del píxel
(i) usuario, empresa o institución proveedora de la imagen
(j) plataforma o equipo con el que se ha tomado la imagen
(k) especificaciones del sensor con el cual se ha tomado la imagen
(l) tamaño de la imagen
(m) tipo de imagen
(n) tipo de licencia con la que cuenta la imagen
67


68
vi. Vincular la imagen de OAM con JOSM. Al dar clic en donde dice JOSM, abrirá una ventana de aviso que dicta “Success” lo que indica que la imagen se ha cargado de manera exitosa en JOSM.


69
vii. Tardará unos segundos en cargarse la imagen en JOSM y aparecerá la capa de la imagen descargada desde 0AM con la capa de datos existente. ¡Listo! Ya podemos mapear en JOSM utilizando la imagen de fondo

70
8. Recomendaciones
- Se debe tener en cuenta que para el vuelo, el control debe estar conectado a internet a través de una red Wifi, es recomendable siempre estar cerca de un lugar donde se pueda tener acceso directo a internet.
- No utilizar el RPAS en condiciones meteorológicas adversas. Estos incluyen días de lluvia, niebla, calor con temperaturas mayores a 40°C, radiación UV elevada, y cuando las velocidades de viento sean mayores a 10 m/s.
- El punto de despegue, debe estar en un área abier ta, con un radio libre de aproximadamente 10 mts, sin inter ferencia de construcciones, árboles u otras estructuras altas que puedan obstaculizar el vuelo, que puedan afectar la precisión de la brújula o del sistema GNSS a bordo
- Si el punto de despegue es un área de pastizal se recomienda el uso de una base protectora de aterrizaje sobre la cual colocar la aeronave para la protección de su cámara
- Prever que la brújula de la aeronave esté bien calibrada. Considerar que calibrar la brújula es un proceso que lleva unos minutos y consume batería
- Verificar que el Firmware de todas las herramientas necesarias para el vuelo estén actualizadas y prever que las baterías de cada una están cargadas.
- Es recomendable que en los días de mucho viento, se reduzca la velocidad de vuelo y la altura para obtener mejores resultados
- Minimice volar en áreas donde se encuentren estaciones, base y torres de transmisión de radio, que tienen altos niveles de electromagnetismo, para evitar inter ferencia entre las señales de conexión que vinculan a la aeronave, el mando de control y la antena RTK.
71
Referencias
DJI. (2020). Phantom 4 RTK User Manual.
https://dl djicdn com/downloads/phantom 4 r tk/20200721/Phantom 4 R
TK User Manual v2.4 EN.pdf
Ley N° 1.860 de 2002. Código Aeronáutico de la República del Paraguay. 7 de enero de 2002
https://www bacn gov py/leyes-paraguayas/4633/ley-n-1860-estableceel-codigo-aeronautico-de-la-republica-del-paraguay
Morales, A. (2019). OpenDroneMap: crea mapas con imágenes capturadas por drones MappingGIS
https://mappinggis.com/2019/08/opendronemap-crea-mapas-con-imag enes-capturadas-por-drones/
OpenAerialMap. (s.f.). About. https://openaerialmap.org/about/
OpenDroneMap (s f ) Instalación y Guía de Introducción, documentación de OpenDroneMap. https://docs.opendronemap.org/es/installation/
Phantom 4 RTK field workflow (s f) Aerotas: Drone Data Processing for Sur veyors. https://www.aerotas.com/phantom-4-r tk-field-workflow
Resolución N° 2.170 de 2017. Por la que se aprueba el Reglamento DINAC R 1103Reglamento de Aeronaves Pilotadas a Distancia (RPA) y Sistema de Aeronaves Pilotadas a Distancia (RPAS) 21 de noviembre de 2017
http://www.dinac.gov.py/v3/index.php/documentos1/leyes-decretos-res oluciones-circulares/item/1814-resolucion-n-2170-2017-por-la-que-se-a prueba-el-reglamento-dinac-r-1103-reglamento-de-aeronaves-piloteada
s-a-distancia-rpa-y-sistema-de-aeronaves-piloteadas-a-distancia-rpas
WebODM. (s.f). WebODM Documentación. https://docs.webodm.org/
72

