International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072

International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
1professor, Dept. of Electronics and communication, GND Engg. College, Bidar, India. 2,3,4Student, Dept. of Electronics and communication, GND Engg. College, Bidar, India. ***
Abstract - Doctors are usually needed to work at every hospital and emergency center every now and then. But it is not feasible for every doctor to be available at every place at desired time. The problem with video calling is that video calls need to be done from a PC or laptop on a desk. This limits the doctor’s capacity to view patient or around operation theatre at will or even move through hospital rooms as needed. To help solve this issue we here develop a virtual doctor robot that allows a doctor to virtually move around at a remote location at will and even talk to people at remote location as desired. This robot provides a whole lot of advantages for doctors: Doctors’ ability to be at anyplace anytime, Doctors can move around in operation theatres, Doctors can move around the patient with ease, Doctors can see medical reports remotely via video calls, Doctors can move around in other rooms at will The system makes use of a robotic vehicle with 4 wheel drive for easy navigation. The robot also includes a controller box for circuitry and a mounting to hold a mobile phone or tablet. The mobile or tablet is used to hold live video calls. The doctor can use an IOT based panel to control the robot. The control commands sent online are received by the robot controller. The robot controller operates over Wi Fi internet. The received commands are received inreal time and the robot motors are operated to achieve the desired movement commands.
Key Words: Robotic vehicle, Easy navigation, controller box, IOT based panel, robotic motors.
Thereisagrowingtrendinthemedicalfieldtominimizethe need for hospitalization, moving several health care procedures from hospitals (hospital centric) to patient's homes(home centric).Thisstrategyhasbeenraisedmainly due to its possibility for improving patient's wellness and treatmenteffectiveness.Itcanalsoreducethecostsofthe publichealthsystemworldwideanditsefficiency,whichin thelastdecadehasbeenchallengedbythepopulationaging andtheriseofchronicdiseases.
Forthispurpose,InternetofThings(IoT)provides thescalabilitywhichsupportscontinuousandreliablehealth monitoringonaglobalscale.Thisparadigmisincreasingly becomingavitaltechnologyinhealthcare.Furthermore,the recentprogressinlow powerconsumption,miniaturization,
andbiosensorshasrevolutionizedtheprocessofmonitoring anddiagnosinghealthconditions.
For patients' de hospitalization the platform proposedinitiallyweredesigned,byincludingwearableand unobtrusive sensors. The software is developed and the components are guided by the Reference Architecture for IoT basedHealthcareApplicationsforarealintensivecare unit (ICU) and the interoperability with existing multiparametricmonitors.
Fig1: VirtualDoctorModelling
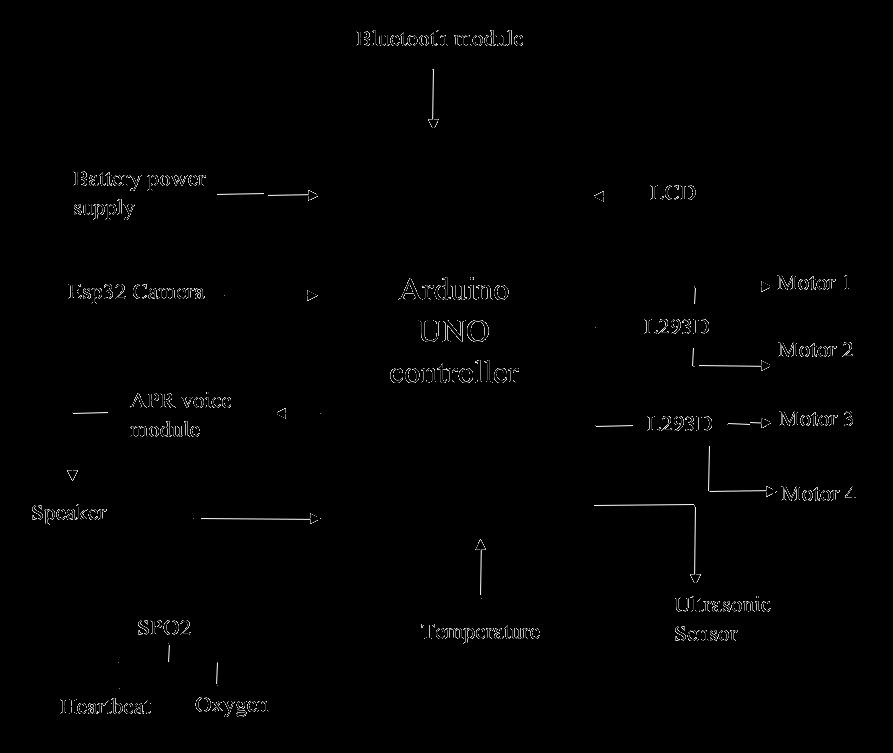
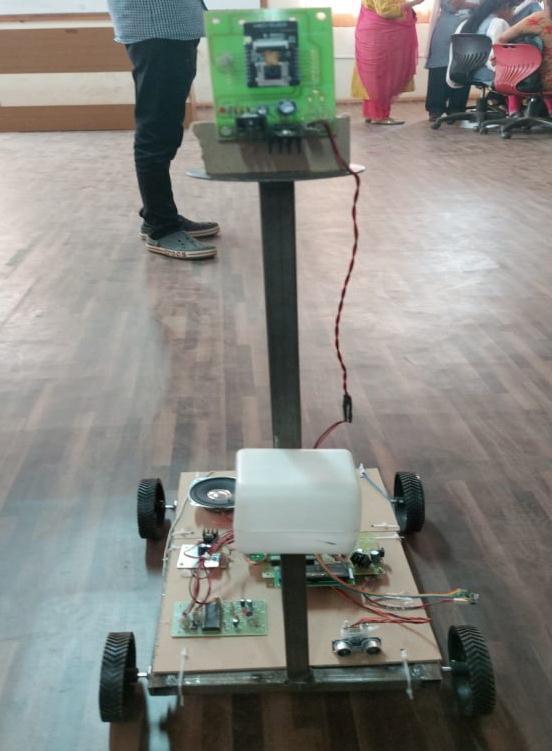
The major component of the Robot is Arduino UNO controllerwhichrunsonbatterypowersupply,thatastobe charged, whenever it gets discharge. It consists of Esp32 Camerawhichisusedtoseetherealtimesituation.Therobot havingfourwheelsiscontrolledusingcommandsbywhichit canmovearoundthepatients,robotiscontrolledbydoctor bymonitoringonthescreenusingEsp32camera.Itconsists ofARPvoicemodulethroughwhichspeakerisconnectedto therobot,itconsistsofthreevoicecommands.Itconsistsof SPO2 (heartbeat & Oxygen)sensor ad temperaturesensor whentouchedthevaluesaresensedaddisplayedonLCD.The fourwheelsarecontrolledusingmotorswhichareconnected
2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal |

International Research Journal of Engineering and Technology (IRJET)
e ISSN: 2395 0056
tothecontrollerviaL239Dmodule.Ultrasonicsensorisused todetecttheobstacle,wheneveritdetectsobstacletherobot stops,againcommandsshouldbegiventostarttherobot.
The required hardware components are: Arduino Uno, 16X2 LCD display, APR9600, DC motor, ESP32 cam, ESP8266, L293D, LM35, LM7085, MAX30100, Ultrasonic sensor
Theadditionalcomponentsrequiredarerod,cardboard, transformer for charging the battery, PCB’s and soldering gun.
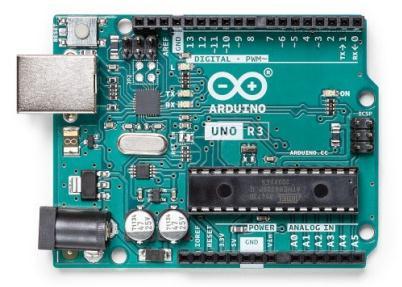

TheArduinoUNOR3istheperfectboardtogetfamiliarwith electronics and coding. This versatile microcontroller is equipped with the well known ATmega328P and the ATMega16U2Processor.
ThetermLCDstandsforliquidcrystaldisplay.Itisonekind ofelectronicdisplaymoduleusedinanextensiverangeof applications like various circuits & devices like mobile
phones,calculators,computers,TVsets,etc.Thesedisplays aremainlypreferredformulti segmentlight emittingdiodes andsevensegments.
TheAPR9600deviceofferstruesingle chipvoicerecording, non volatile storage, and playback capability for 40 to 60 seconds.Thedevicesupportsbothrandomandsequential accessofmultiplemessages.


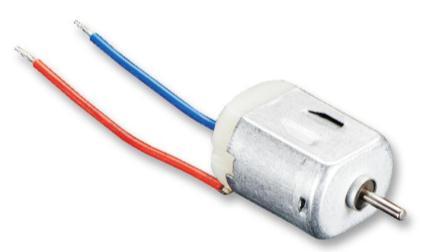
ADCmotorisanyofaclassofrotaryelectricalmachinesthat converts direct current electrical power into mechanical power.
ESP32 CAM
FIG6: ESP32 CAM
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
ESP32 CAMisalow costESP32 baseddevelopmentboard withonboardcamera,smallinsize.TheboardintegratesWiFi, traditional Bluetooth and low power BLE , with 2 high performance 32 bit LX6 CPUs. It adopts 7 stage pipeline architecture,on chipsensor,Hallsensor,temperaturesensor and so on, and its main frequency adjustment rangesfrom 80MHzto240MHz.
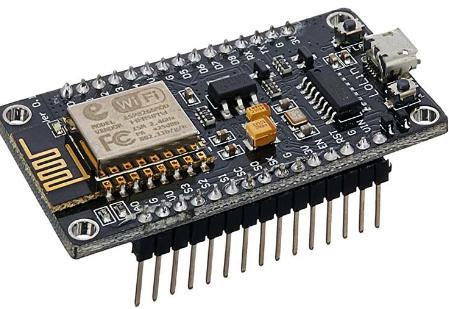
ESP8266
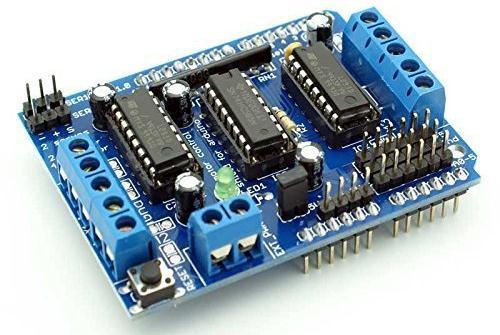
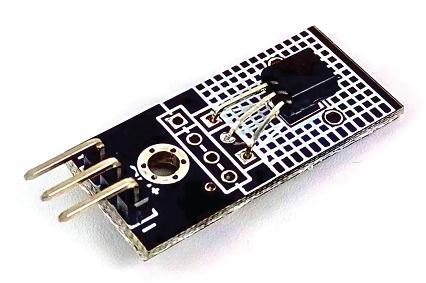
Fig7: ESP8266
NodeMCU is an open source Lua based firmware and development board specially targeted for IoT based Applications.ItincludesfirmwarethatrunsontheESP8266 Wi Fi SoC from Espressif Systems, and hardware which is basedontheESP 12module.
TheL293andL293Ddevicesarequadruplehighcurrent half Hdrivers.TheL293isdesigned toprovide bidirectionaldrivecurrentsofupto1Aatvoltagesfrom 4.5Vto36V.TheL293Disdesignedtoprovide bidirectionaldrivecurrentsofupto600 mAatvoltages from4.5Vto36V.
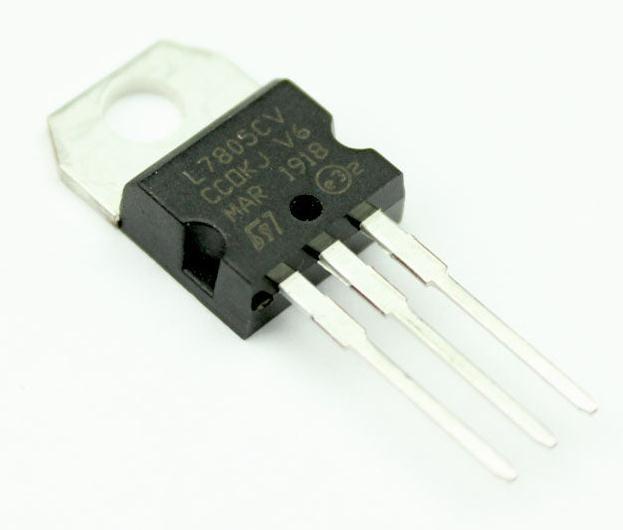
Fig9:

TheLM35seriesareprecisionintegrated circuittemperature deviceswithanoutputvoltagelinearly proportionaltothe Centigrade temperature.
LM7805
Fig10: LM7805
TheLM7805isavoltageregulatorthatoutputs+5volts.
MAX30100
Fig11: MAX30100
TheMAX30100isanintegratedpulseoximetryandheart rate monitor sensor solution. It combines two LEDs, a photodetector,optimizedoptics,andlow noiseanalogsignal processingtodetectpulseoximetryandheart ratesignals.
2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal |
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072

Fig12: UltrasonicSensor
UltrasonicrangingmoduleHC SR04provides2cm 400cm non contactmeasurementfunction,therangingaccuracycan reachto3mm.Themodulesincludesultrasonictransmitters, receiverandcontrolcircuit.

I. Connect the power supply to the Arduino to start therobot
II. On the mobile Wi Fi/router connection such that thecammodulewillconnecttotheinternetandits IPaddressisfoundedbyusingNetworkscannerIP scannerapp,byfindingisvendornameasespressif Inc.noteitsIPaddress.
Fig14: NetworkscannerIPscannerapp thenopentheIPaddressintheinternetbrowserandseethe livestreaming.
Fig13: VirtualdoctorrobotModel
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072

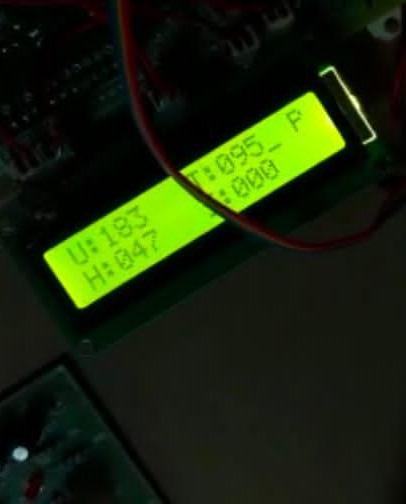
IV. Afterplacingfingersonsensorswegettheoutput on LCD display as well as on the mobile screen whichisvisibletothedoctor.
Fig15: CameraDisplayinwebbrowser
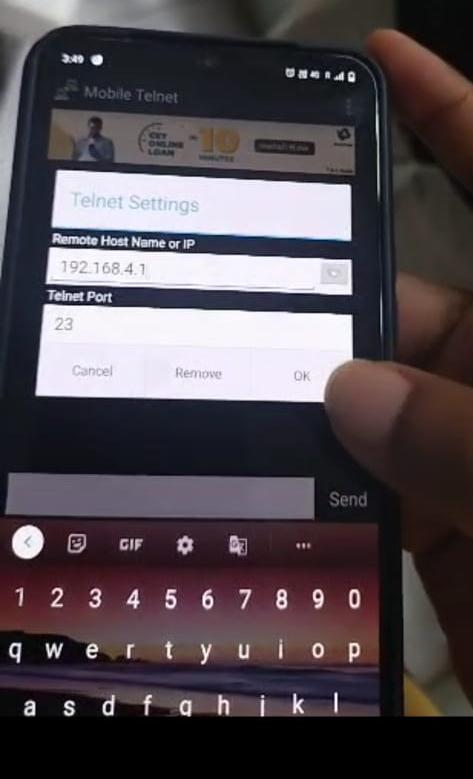
III. ESP8266 Wi Fi Module is connected to the telnet app,typetheRemoteHostNameorIpandthenwe cangivethecommandstotherobotmovementi.e left(*l#),right(*r#),front(*f#),back(*b#)andvoice commandssuchas(*1#.)Placingfinger,(*2#.)Take tablet,(*3#.)Allok,Takerest.
Fig 16:Telnetapp
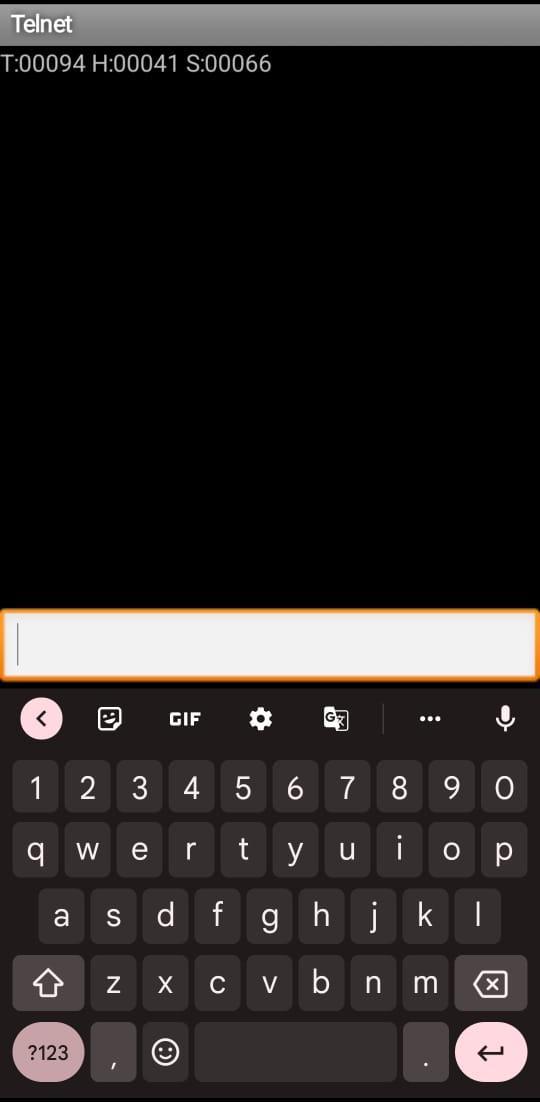
Fig17: Telnetappdisplay
Fig18: LCDdisplay
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
UsingIoTbasedvirtualdoctorrobot,theburdenofadoctor canbereducedduringthebusyschedule.Thewaitingtime ofthepatientscanbereduced.Primarypatientmonitoring andpatientcaringassistancewithdailyactivitiesisachieved. Foruserfriendly,wedesigned"Doctorrobot"withmanual andautonomouscontrolsystem.Doctorsfromanywherein theworldwillbeabletoshowtheall patientdatawithout touching the patient through the IOT system and make communicate video calls with the patient. We believe this robotwillgoalongwayinalleviatingthelackofadequate doctorsinmedicalservicesaroundtheworld.
Clinicalrobotshelpwitha medicalprocedure,smoothout emergency clinic coordinated factors, and empower supplierstoconcentrateonpatients.Robotsintheclinical field are changing the way that medical procedures are performed, smoothing out supply conveyance and sanitization,andsavingtimeforsupplierstodrawinwith patients. Clinical robot market is relied upon to acquire marketdevelopmentinthefiguretimeof2022to2028.
[1] Mr.R.Ramadoss "Automated Virtual Robot DOCTOR.” International Journal of Engineering Science Invention(IJESI), vol. 6, no. 12, 2017. M. Young, The TechnicalWriter’sHandbook.MillValley,CA:University Science,1989.
[2] Xi Vincent Wang, Lihui Wang, KTH Royal Institute of Technology.”robotictechnologiesduringtheCOVID 19 pandemic”,August2021.
[3] Supreet Thale, Bhushan N Chopda, Shreyas Deo, Viraj Nyayadhish,PSrivalli,UnnatiChoudhari,SerlinAgnes, NilofarSameena.M,”DesignofSmartMedicalAssistant Robot for Contactless Preliminary Health Check Up of Patients”,InternationalResearchJournalofEngineering andTechnology,Aug2020.
[4] TorbjørnS.DahlandMagedN.KamelBoulos2,”Robots inHealthandSocialCare”,30Dec2013.
[5] YANGSHEN,DEJUNGUO,FEILONG,LUISA.MATEOS, HOUZHU DING , ZHEN XIU , RANDALL B. HELLMAN , ADAMKING,SHIXUNCHEN,CHENGKUNZHANG,AND HUAN TAN,” Robots Under COVID 19 Pandemic” December18,2020.
[6] IEEE,”Avirtualdoctorprototypeforquickdiagnosisand securehealthinformationexchange”,18August2014.
[7] SergioD.SierraMarín1,PatricioBarria,Subramanian Ramamoorthy , Marcelo Becker ,”Expectations and Perceptions of Healthcare Professionals for Robot
Deployment in Hospital Environments During the COVID 19Pandemic”,02June2021
[8] IEEE,” Telemedicine and Virtual Specialist Hospitals Virtual Presentia (VIP) and Virtual Absentia (VIA) Hospitals”,28December2009.
[9] Md. Anowar Hossain , Md. Jasim Uddin Qureshi,”IoT BasedMedicalAssistantRobot(Docto Bot)”,December 2021.
2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal