
An Experimental Analysis on Self Driving Car Using CNN
Dr Manju Bargavi S K1, Sowjanya M1Professor & Department of MCA, Jain University School of Computer Science and IT, Bangalore, India, Student & Department of MCA, Jain University School of Computer Science and IT, Bangalore, India,

Abstract - For the past decade, there has been a surge of interest in self driving cars. This can be because of breakthroughs within the fieldofdeeplearningwhereverdeep neural networks square measuretrainedtoperformtasksthat generally need human intervention. CNN’s apply models to spot patterns and options in pictures, creating them helpful within the field of pc Vision. Samples of these square measure object detection, image classification, image captioning, etc. during this project, we've trainedaCNNvictimizationpictures captured by a simulated automotive to drive the automotive autonomously. The CNN learns distinctive options from the pictures and generates steering predictions permitting the automotive to drive while not somebody's. For testing functions and getting ready thedatasettheUnity basedmostly machine provided by Udacity was used.
Key Words: Autonomous driving, Convolutional Neural Network (CNN), Deep learning, end to end learning, NVIDIA, Steering commands.
1. INTRODUCTION
Inrecentyears,autonomousdrivingalgorithmspersecution reasonablypricedvehicle mountedcamerashaveattracted increasinganalysisendeavorsfromeach,domainandtrade. Varied levels of automation are outlined in autonomous driving. There’s no automation in level zero. Somebody's drivercontrolsthevehicle.Leveloneandacoupleofsquare measure advanced driver help systems wherever somebody's driver still controls the system however a number of options like brake, stability management, etc. squaremeasuremachine driven.Levelthreevehiclessquare measure autonomous, however, somebody's driver continuestoberequiredtoobserveandintervenewhenever necessary. Level four vehicles square measure totally autonomous however the automation is restricted to the operational style domain of the vehicle i.e. it doesn't cowl each driving state of affairs. Level five vehicles square measure expected to be totally autonomous, and their performanceoughttobesuchasthatofsomebody'sdriver. Wetendtosquaremeasureterriblyofffromachievinglevel Five autonomous vehicles within the close to future. However,level 3/4autonomousvehiclessquaremeasure probablychangingintoarealitywithintheclosetofuture. Primaryreasonsforforcefultechnicalachievementsduring these fields square measure technical breakthroughs and wonderfulanalysisbeingexhaustedthesectorofpcvision
and machine learning and conjointly the cheap vehicle mounted cameras which may either severally give unjust dataorcomplementdifferentsensors.Severalvision based drivers assist options are wide supported within the fashionable vehicles. A number of these options embrace pedestrian/bicycle detection, collision turning away by estimating the front automotive distance, lane departure warning,etc.However,duringthisproject,wetendtotarget autonomous steering, that could be a comparatively unknown task within the field of pc vision and machine Inlearning.thisproject,
wetendtoimplementaconvolutionalneural network(CNN)tomaprawpixelsfromthecapturedpictures tothesteeringcommandsforaself drivingautomotive.With minimumcoachingknowledgefromthehumans,thesystem learns to steer on the road, with or while not the lane markings
2. RELATED WORK
The DAVE system was created by government agency [1] andusedpicturesfrom2cameraslikewiseasleftandright steering commands to coach a model to drive. It demonstratesthatthetechniqueofend to endlearningmay be applied to autonomous driving. This implies that the intermediateoptionslikethestopsignsandlanemarkings don’tneedtobeannotatedorlabeledforthesystemtobe told.DAVEisassociatedegreeearlyprojectwithinthefield of autonomous driving. Within the context of current technology, a large portion relied on wireless knowledge exchange as a result of the vehicle couldn’t carry the computersandpowersourcesforthesystem,thatcontrasts thelighterinstrumentationthatexistsnowadays.Thedesign ofthismodelwasaCNNcreatedoftotallyconnectedlayers thatstemmedfromnetworksantecedentsutilizedinseeing. TheALVINNsystem[2]couldbea3 layerback propagation network designed by a bunch at CMU to finish the task of lane following. It trains on pictures from a camera and a distancelivefromanopticaldevicevaryfindertooutputthe directionthevehicleoughttomove.ALVINN’smodeluses onehiddenlayerback propagationnetwork.
We replicated a study by NVIDIA [3]. The system uses associate degree end to end approach wherever the information is 1st collected in multiple totally different environmentalconditions.Theinformationisthenincreased
toformthesystemsturdytodrivingoffcenterandtototally different potential environments. Consecutive step is coachingthenetworkonthisknowledge.Recently,apaper byahandfulofIEEEresearchersintroducedquiteatotally different neural spec that additionally takes the temporal infounderconsideration[4].Theyachievedthisinappliesby amixtureofnormalvector basedLongmemory(LSTM)and convolutionalLSTMattotallydifferentlayersoftheplanned deepnetwork.Consecutiveframestypicallyhavethesame visuallook,howeverdelicateperelementmotionsmaybe discoveredoncetheopticalflowiscomputed.Typicalimage convolutions, as those adopted by progressive image classificationmodels,willshiftoneachspatialdimensionsin a picture, which means that they're primarily 2 D. Since theseconvolutionscareforstaticpicturesormultichannel response maps, they're incapable of capturing temporal dynamicsinvideos.Theauthorsadoptedaspatio temporal convolution (ST Conv) that shifts in each spatial and temporal dimensionssoapplyingtheconvolutioninthree dimensionsascriticalthenormal2 Dmethod. Asimilarpaperadditionallyplannedtheconcepttoinclude temporalinfowithinthemodeltobetoldthesteeringinfo [5]. During this paper the authors demonstrate quantitativelythataConvolutionalLongmemoryrepeated NeuralNetworks(C LSTM)willconsiderablyimproveend to endlearningperformanceinautonomousvehiclesteering supportedcamerapictures. Impressedbytheadequacyof CNNinvisualfeatureextractionandthereforethepotencyof Longmemory(LSTM)repeatedNeuralNetworksincoping with long range temporal dependencies our approach permitstomodeldynamictemporaldependencieswithinthe contextofsteeringangleestimationsupportedcamerainput.
3. DATA COLLECTION
We used Udacity’s self driving automobile machine for assemblingtheinfo.ThismachineismadeinUnityandwas utilizedbyUdacityfortheSelf DrivingNanodegreeprogram howeverwasrecentlyopen sourced[6].Itreplicateswhat NVIDIAdidwithinthesimulation.Weareabletocollectedall our information from the machine. Exploitation our keyboard to drive the automobile, we have a tendency to wereabletoinstructthesimulatedvehicletoshowleft,right, speedupandhamper.Anothervitalfacetisthatthismachine maybeusedforcoachinginadditionastestingthemodel. Hence,it's2modes:(i)coachingmode,and(ii)Autonomous modeasshowninFig.1.

Thecoachingmodeisemployedtogathertheinfoandalso theautonomousmodeisemployedtocheck themodel.In addition, thereare two differentvarieties of trackswithin themachine thelaketrackandalsothejungletrack.The laketrackiscomparativelysmallerandsimpletohandlethe automobileincomparisonwiththejungletrackasshownin Fig.2andFig.3.Themachinecapturesinformationoncethe automobile is driven round the track exploitation left and rightkeystomanagethesteeringanglesandupanddown arrowstomanagethespeed.
Fig.2UdacitySimulator:ThelakeTrack
From this, the machine generates a folder containing pictures and one CSV file. The image folder contains 3 picturesforeachframecapturedbytheleft,centerandright camera and each row within the CSV file contains four metrics steeringangle,speed,throttleandbrake,foreach capturedframe.Fig.4,Fig.5.andFig.6showtheleft,center andrightimage,foroneframe.
 Fig.1UdacitySimulator
Fig.1UdacitySimulator
4. DATA PREPROCESSING
Thedatathatwehaveatendencytocollecti.e.thecaptured picturesareaunitpreprocessedbeforecoachingthemodel. Whereaspreprocessing,thepicture'sareaunitcroppedtoget rid of the sky and front portion of the automobile. The picture'sareaunitthenrebornfromRGBtoYUVandresized totheinputformutilizedbythemodel.Thisisoftendoneasa resultofRGBisn'tthesimplestmappingforperception.YUV color spacescouldbea farmoreeconomicalcryptography andreducestheinformationmeasurequiteRGBcapturewill. Afterchoosingtheultimatesetofframes,theinfoisincreased byaddingartificialshiftsandrotationstoshowthenetworka waytopassthoughapoorpositionororientation.Whereas


augmenting,wehaveatendencytowilly nillyoptforright, leftorcenterpictures,willy nillyflipthepicturesleft/right andregulatethesteeringangle.Thesteeringangleisadjusted by +0.2 for the left image and 0.2 for the proper image. Exploitationtheleft/rightflippedpicturesishelpfultocoach therecoverydrivingstateofaffairs.Wehaveatendencyto conjointly willy nilly translate the image horizontally or vertically with steering angle adjustment. The horizontal translation may be helpful for handling eventualities with troublesome curves. The magnitude of those changes is decided willy nilly from a standard distribution. The distribution contains a zero mean. We have a tendency to apply these augmentations employing a script from the Udacity
Augmentedrepository.pictures
area unit adventitious into this set of picturesandtheircorrespondingsteeringanglesareadjusted withrelevanceaugmentationperformed.Thefirstreasonfor thisaugmentationistoformthesystemalotofstrong,thus, learning the maximum amount as doable from the surroundings by exploitation various views with various settings.
5. DATA LEARNING MODEL
Thedeeplearningmodelwehaveatendencytoreadyrelies ontheanalysisdonebyNVIDIAforhisorherautonomous vehicle[3].Themodelcontainsofthesubsequentvitallayers.
5.1ConvolutionalLayer
Convolutional layer applies the convolution operate (filter) on the input image and produces a 3D output activation of neurons. This layer helps to seek out varied optionsoftheimagethatisemployedforclassification.The amountofconvolutionallayerswithinthenetworkdepends on the kind of application. The initial convolutional layers withinthenetworksfacilitateobservethelowleveloptionsof the image that area unit easy and also the convolutional layers more facilitate in police investigation the high level optionsoftheimage.
 Fig.4 LeftImage
Fig.5CenterImage
Fig.6RightImage
Fig.4 LeftImage
Fig.5CenterImage
Fig.6RightImage
5.2 MaxPoolingLayer
Pooling/Down sampling layer helps in reducing the amountofparameters/weightswithinthenetworkandhelps inreducingthecoachingtimewhilenotlosinganyspecific featureinfooftheimage.Thislayerproducesasmallerimage than the input image by down sampling the image exploitation pooling of neurons. There area unit differing kinds of pooling like gamma hydroxybutyrate pooling, average pooling, L2 norm pooling etc. however gamma hydroxybutyratepoolingisthattheonethatismostgenerally used.5.3
DenseLayer
Denselayerortotallyconnectedlayeristhatthesameas traditionalneuralnetworklayerduringwhichalltheneurons duringthislayerareaunitconnectedtoeveryneuronfrom previous layer. This layer is usually designed because the finallayerwithintheconvolutionalnetwork.
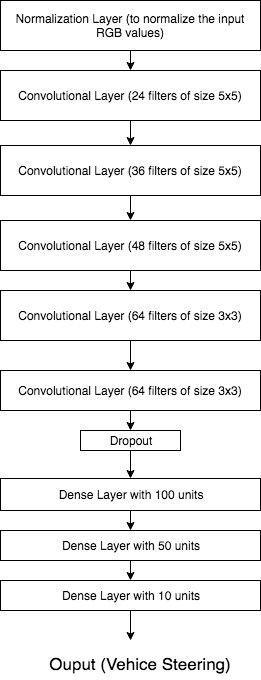
5.4 Neuralnetwork.
TheentiredesigndiagramisshowninFig.sevenThere areaunitfiveconvolutionallayerswithvariedrangeoffilters andsizesandadropoutsubsequentlytohandleoverfitting.In theend,threedenselayerswereadventitiousfollowedbythe output layer. Adam optimizer was used for parameter optimization with a set learning rate. Batch size of one hundredwaschosenandalsotherangeofepochsof50 60 wasexperimentedwith.OnamachinewhilenotGPU,sixteen GBramCorei5ittookroughly06hoursofcoaching.
6. SYSTEM DESIGN
The high level design of the system in Fig 8 shows when activity information augmentation on the input pictures, batches area unit created from them and fed to the CNN model for coaching. When the coaching is completed, the model is employed to perform prediction on the steering angle and send the predictions to the Udacity machine to drivetheautomobileinrealtime.
6.1Performanceanalysis
For performance analysis throughout coaching, mean squareerrorwasusedasalossoperatetostayatrackofthe performanceofthemodel.
In reality eventualities, whereas driving on road, the subsequentmetrichasbeenplannedin[3].Thismetrichas beennamedasautonomy.It'scalculatedbyinvestigationthe quantityofinterventions,multiplyingbyviseconds,dividing bythetimeperiodofthesimulatedcheck,andsosubtracting theresultfromone.
Measureofautonomy,thiscouldmeanthattheautomotive waseighty seven.5%autonomous.Wetendtore trainedthe modelwithadditionalinformationandalsothevehiclene'er droveoffthetrail,creatingit100percentautonomous.The generaldrivingbehaviordoesn’tseemrealistic.Itseemsto improveandforthbetweenthesidesofthelane.
Duringtheprimaryrunonthelaketrack,thevehicledoesn’t leavethetrack,howeveritseemstohugtheleftfacetofthe lanewhichisthatthedirectionthatthecurvewithinthetrack ispoppingtowards.Thevehicledrivestotheleftfacetofthe laneandonceitrunsgettingreadytotheleftlanemarking, thevehicledrivesbackwithinthedirectionofthemiddleof the lane till it'saround halfway between the middle ofthe laneandalsotheleftlanemarking,thenitdefendstotheleft facetofthelane.Thisbehaviorrepeats.Oncere trainingthe model,thevehicle’sdrivingseemsfarsleeker.Itdoesn’thug theleftfacetofthelane,howeveritseemstodriveto1facet of the lane and move towards the opposite. This behavior conjointlyrepeats.Intermsofautonomy,eachofthemodels seemtobe100percentautonomous.
Afterthesecondtimewetendtotrainthemodel,wetendto noticed oncebehaviorthatthevehiclewilldriveautonomously,howeverthewasn'tnatural.Thiscanbeonethingtostayinmindpurificationthesystem.
7. EXPERIMENTAL RESULTS
Thesimulationsurroundingsisusingudacityself drivingcar simulator and the system is based on NVIDIA model [10]. Figure 10 shows the learning surroundings formed in the simulationstudyandfigure6showstrialimagestakenby left camera, centre camera and right camera in training method. The data composed is about 16,000 images and categorizedwiththetypeofroadanddrivermovementsuch asonlaneorturning.Thesimulationsamplerateis10FPS andimageresolution320x160pixels.
Before the learning progression, the image taken will be regularizebyremovingtheskyandotheravoidablepartsof picture for simplifying the learning process. Some pre processingofcomposeddataimagesalsocompriserotation, horizontal flip, vertical flip, and RGB to YUV transform to advancethequalityoftheclassificationendresult.
The training procedure using 5x5 kernel for the first 3 convolution layer and 3x3 kernel for the last three convolutionlayerandutmostepochs20with2.000example foreachepoch.
Afterthetrainingfinishabout2or3laps,thesimulatorthen switch to the autonomous mode and then base the model createdbytheCNN,thecarwillrununconventionallyand cancalculateforeveryroadsituation.
Thesimulationisimplementedonasystemwithi5processor and12Gmemory.Thelearningtakesabout4 5hours.
8. CONCLUSION
TheprojectedtechniqueofautonomouscarusingCNNcan run effortlessly without error and very stable without fluctuationinenvironmentalsimulationusingudacityself driving car simulator as shown in figure 9. CNN can learn roadsituationfromthreecameras(left,centreandright)and alsomakeamodelfordrivinginautonomousmoderestricted byonecentrecamera.WealsoverifiedthatCNN’sareableto learnthecompletetaskoflane androadfollowingwithno manualdisintegrationintoroadorlanemarkingdetection, semantic abstraction, path planning, and control. An interestinglimitationtothisisthatthe systemwasableto successfullydriveontheroadsthatithadbeentrainedon.To gettheenhancedperformance,nexttrialingwillincludethe complexityinthesimulationsurroundingsandrainmodel withsupplementarynoiseanddistortionatdataimageset. We have many ideas to enhance the act of the self driving automotive,outofthatonewasobligatorythankstolackof yourtime.Theprimaryplanwouldbetoattributethefeature of speed to the CNN so once the machine in autonomous mode, it's persecution the predictable speed creating the movementseemtobesupplementaryrealistic.
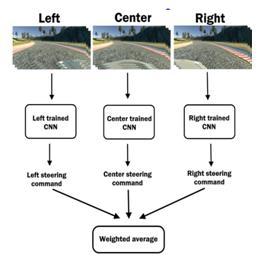

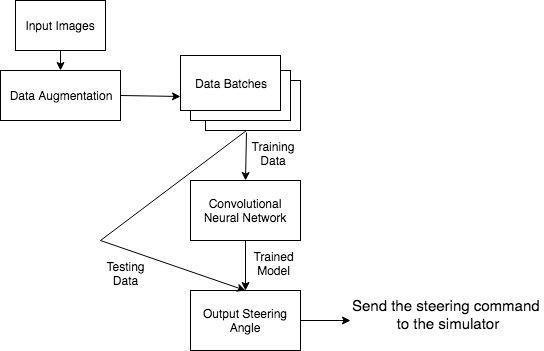 Fig9Drivingmode
Fig.10 ModelPrediction
Fig9Drivingmode
Fig.10 ModelPrediction
International Research Journal of Engineering and Technology (IRJET)
Volume: 09 Issue: 04 | Apr 2022 www.irjet.net
REFERENCES
[1] LeCun, Y., et al. DAVE: Autonomous off road vehicle control using end to end learning. Technical Report DARPA IPTO Final Report, Courant Institute/CBLL, 2004.
[2] Pomerleau, Dean A. "Alvinn: An autonomous land vehicle in a neural network." Advances in neural information processing systems.1989.
[3] Bojarski,Mariusz,etal."Endtoendlearningforself drivingcars."arXivpreprintarXiv:1604.07316(2016).
[4] Chi, Lu, and Yadong Mu. "Deep Steering: Learning End to EndDrivingModelfromSpatialandTemporal VisualCues." arXiv preprint arXiv:1708.03798 (2017).
[5] Eraqi, Hesham M., Mohamed N. Moustafa, and Jens Honer. "End to End Deep Learning for Steering Autonomous Vehicles Considering Temporal Dependencies." arXivpreprintarXiv:1710.03804 (2017).
[6] International Journal of Engineering Research in ElectronicsandCommunicationEngineering(IJERECE) Vol5,Issue4,April2018PrototypeofAutonomousCar UsingRaspberryPi.
[7] Spice B, "Carnegie Mellon, Argo AI Form Center for Autonomous Vehicle Research with $15M Multiyear Grant,"CarnegieMellonUniversity,2019.
[8] MattRichardson,ShawnWallace,GettingStartedwith RaspberryPi,2ndEdition,PublishedbyMakerMedia, Inc.,USA,2014.BookISBN:978 1 457 18612 7
[9] Deep learning for Video classification and captioning byZuxuanWu,TingYao,YanweiFu,Yu GangJianghttps://keras.io/backend
[10] Visualizing and Understanding Convolutional NetworksbyMatthewD.Zeiler,RobFergus.
[11] DesignandImplementationofAutonomousCarusing Raspberry Pi International Journal of Computer Applications(0975 8887)Volume113 No.9,March 2015
[12] Dropout:ASimpleWaytoPreventNeuralNetworks fromOverfittingbyNitishSrivastava,GeoffreyHinton, AlexKrizhevsky,IlyaSutskever,RuslanSalakhutdinov.
e ISSN: 2395 0056
p ISSN: 2395 0072
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page12