
Asaresult,thecurrentstateofagroupofplanesisregarded aspotentiallyhazardousandundesirable.
Page
Theequationfortheabovescenariohasbeengivenbelow: whereF(u(ti),x(ti),ti)isagivenfunctionthatdescribesthe dispatcher'scommandexecutionperiod.
The theory offiniteautomata hasa formalism thatis both rigorousandstraightforwardindescribingitssolutions,as
Abstract - Models and algorithms have been designed to monitor the landing phase when the location of the aircraft in space is unknown due to undesirable, unforeseen external influences. The dispatcher's command execution time is regarded as the objective feature, and criteria for aircraft safety are added as constraints. An approach has been developed based on the developed formalism of generalized synchronization of linearautomata, whichallowsthisproblem to be reduced to an integer linear programming problem. The use of established models and methods to monitor the aircraft landing process has been considered as an example.
AgroupofaircraftfromthesetJ0Jisinthes(0)stateasa resultofatemporarylackofcontactwiththedispatcher.The set J0 is considered to include states that are listed as hazardous,suchasstateswithdangerousaircraftproximity.
Key Words: synchronisation,generalisedstatemachine, essential combinations of events, aircraft, aviation, linear automata, finite state machine
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 02 | Feb 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | 955

Thefollowingistheformalproblemstatement.Agroupof aircraftplanningtolandintheairport'sareaofresponsibility isdenotedbytheletterA.Eachaircraft'sstateasitentersAis definedbyitslocationatsomeassumedaltitudelevel.
Inthereal worldactivityofcomplexsystems,unfavourable environmental conditionscontribute touncertainty in the locationoftheircomponentsinspaceandtime. Whenthe activitiesofdevicecomponentsbecomedisjointed,incidents that aren't harmful under normal circumstances can combinetocauseaccidentsanddisasters.
1.INTRODUCTION
Automata Theory Models and Algorithms for Controlling an Aircraft Group in Aviation sector Shourya Chambial1 1School of Information Technology and Engineering, Vellore Institute of Technology, Vellore, 632014, India ***
A subset Js J of safe conditions for a group of aircraft also exists.Theaimistocreatemethods,models,andalgorithms thatallowforthediscoveryofasequenceofsignalsu(t1),..., u(tk)fromthesetofadmissiblecontrolactionsUinthetime interval[t0,t1]allottedforsolvingthisproblem,asaresultof whichagroupofaircraftcanmoveintosomestatefromany initialstatefromthesetJ0,foralladmissibleenvironmental influencesx(t)X(t).
It is proposed that the established mathematical models, methods,andalgorithmsforgeneralisedsynchronisationof finiteautomata beusedtoassistthedispatcherinmaking decisions that will improve the efficiency of controlling a groupofaircraftinadverseenvironmentalconditions.
3. THE PROBLEM SOLVING MODEL, PROCESS, AND APPROACH
Since the number of aircraft and the possibilities for their positionatvariousflightlevelsarerestricted,itisproposed thattheproblembesolvedusingmethodsfromthetheoryof finiteautomata.
Thestateofthisgroupisdeterminedbythecombinationof aircraftstatesfromgroupA,whichcanbeformalizedwitha vector whose coordinates correspond to the conditions of individualvessels.Asetofcorrespondingvectorscanthusbe used to define the set of possible states for a group. J representsthesetofpossiblestatesforthegroup.
Basedonhisexperience,professionalism,andcommonsense, thedispatcherselectsthesafestoptionfromamongthem.
2. PROBLEM SETTING Assume that a group of aircraft is now in a potentially dangeroussituationasaresultofashort termlossofcontact causedbyenvironmentaleffectsorothermeans. We need to get the group of aircraft out of the potentially dangerous situation as soon as possible after contact is restored.Theknowledgeandadvisorysystemproducesand presentstothedispatcheranumberofsolutionstotheissue.
Theprobleminaviationtransportationsystemsistorestore a stable cooperative arrangement of aircraft after an ambiguityarisesduetounexpectedexternalfactors,suchas climatic or radio electronic influences. For pilots and dispatchers,solvingthisissueisfollowedbyahighdegreeof informationalandpsychologicaltensioninrealtime.
transitionfunctionimpliestheexistenceofallsequencesof length at least k, and that finding the synchronization sequenceinthiscasereducestosolvingasystemoflog2N linearalgebraicequations,whereNisthenumberofstatesin the TheFSM.representationofanFSMintheformofanautomaton withalineartransitionfunctionhasbeenconsidered,aswell asalgorithmsforsolvingthisproblem.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 02 | Feb 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page956
4. THE PROBLEM’S SOLUTION
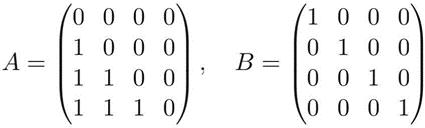
Considerthesituationwherethepresenceoffouraircraftat fourdifferentaltitudelevelsdeterminesthestates(t)ofthe device.Ifsi(t)=1,oneaircraftisonlevelIandifsi(t)=0,one ormoreaircrafthavemovedtoasinglelevel.
0 1 vectors of dimension 4 are often used to describe dispatchercommandsassociatedwithFSMinputsignals.If ui(t) = 1, the aircraft on level I must change levels, and if ui(t)=0,theaircraftonlevelIreceivesnoorder.
Considerthelinearcase,wherethestateoftheaircraftgroup s(t + 1) is determined by the relation after executing the commandcorrespondingtoasignalu(t).
Thecharacteristicmatricesaredefinedasfollows: andalloperationsarecarriedoutontheGFsector(2).
ConstructtheFSMmodelandcreatearelationship between state machine components, aircraft systemstate,anddispatchercommands.
Thesafestates(1,1,1,1)Tand(1,1,1,0)Tcanbeinterpreted as a generalized state s = (1, 1, 1,... )T, where the last coordinatecantakethevalues0or1.
Thenumberof"drops,"orpairsofdifferentneighboring coordinatesofinputvectors,isusedasameasureof
wellaseffectiveintermsofimplementingtheresultsinterms oftimeandnumberofcomputationaloperations. Thevectordesignatingthepositionofaircraftatflightlevels 1,2,...,niscalledtheconditionofthefinitestatemachinein theproblemathand(FSM).Theinputsignalofthesystemisa series of dispatcher instructions given to aircraft at these levelsforalimitedperiodoftime. The concept of automata synchronization can be used to solvetheproblem.AsetofinputsignalsforanFSMu(0),..., u(k 1) is said to be synchronizing if it holds for all initial statess(0),s(0). wheref(s(0),u(0),...,u(k1))isthestatethroughwhich the machinetransfers fromstate s(0)under thecontrol ofthe input synchronizationItsynchronizationsequencecalledgeneralizedIfthoseessence,thegeneralizedwhereelementsasasingleInsynchronizationhypothesis).(itheightsynchronizinggeneralThesequencetheiraircraftTheunderenablessequenceu(0),...,u(k1),i.e.,thesynchronizingsequencetheFSMtobetransferredintoapredefinedfinalstateunknowninitialconditions.dispatcherwillensureaknownconfigurationofthearrangementunderconditionsofuncertaintyaboutinitialstatebyselectingtheshortestsynchronizingandsupplyingtheshortestsequenceofcommands.problemoffindingsynchronizationsequencesforpurposeautomatareducestofindingsolutionsfortrees,whichintheworstcasecanexceedtheO(n3),wherenisthenumberofstatesinthemachinecanbecalculatedbyO(n2)accordingtotheCernyInmostcases,therecanonlybeonesequence.general,iftherequisitefinalsetdoesnothavetobeastate,itisagoodideatothinkaboutsynchronizationinbroadsense.Thegeneralizedstateisasetofstatesdefinedifthestatesofthesystemarerepresentedbyvectorsofofacertainset.[s]visavectorofdimensionvthatcharacterizesthisstates,and[s]visavectorwithcoordinatesofvectorSwithindices1,...,v.Ageneralizedstateis,inasubsetofthesetofallpossiblestatesJforwhichcoordinatesareequaltogivenones.aninputsequencetakesanautomatontoafinitestatethatisindependentofitsinitialstate,itisgeneralizedsynchronizing.Evenifasynchronizingofthegeneralformdoesnotexist,agenericsequenceforanFSMmayexist.hasbeenshownthattheexistenceofageneralizedsequenceoflengthkforanFSMwithalinear
Ascertain that the resulting FSM is linear or linearizable. Ifthemodelislinear,findsynchronizingsequences usinggeneralizedsynchronizationforlinearFSMs;if the model is general type, use the corresponding synchronizationformalism. Analyze the data and come up with dispatcher directivestosolvetheproblem.
Thefollowingstepsofproblem solvinghavebeensuggested.
In whewhichreU=(u1(0),...,u4(0),u1(1),...,u4(1),u1(2),...,u4(2), u1(2),..., u4(2), u1(2),..., u4(2)) T. Using continuous numberinginordertorepresentthecoordinatesofvector U,condition(4)canbewrittenas whereUI0,1,djarenon negativeintegers,1I12,1j3are non negativeintegers.Noticethatwhentheconstraintson thecoordinatesofUaretakenintoaccount,theequationsd1 =d2=0andd3=1followimmediately.


Thestructureofcriterion(3)impliesthatthecoordinatesin thedescribedsetsshouldbeequaltoeachotherandtothe nearest coordinate included in the constraints in order to ensureaminimumnumberof“drops”ofcoordinatesinthe appropriatevectorU.(6).Wemayassume,forexample,that thesecoordinatesareindependent.
Conditionsprogramming.(6)implythatU5=U10,implyingthatamong pairs(U5,U6),(U6,U9),(U9,U10)thereisatleastone"fall" andW(U)1.Itwouldbetheonewearesearchingforifthere isavalueofUforwhichequalityisachieved.Let'sseeifwe canfindthisvalueU. Thevectord3isusedtodividethesetofadmissiblevaluesU. U1+U5+U6+U11=3ford3=1,implyingthatoneof thesenumbersis0andtheothersare1.IfU1=U5atthe sametime,thereareatleasttwo“drops”amongpairs(U1,U 5),(U5,U6),(U6,U9)and(U9,U10);therefore,weconsider thecaseU1=U5. ThenU1=U5=1,U10=0,andU6=U11.IfU10=U11, there are at least two “drops” between pairs (U1,U5),(U5,U6),(U6,U9),(U9,U10),(U10,U11),andwhen U10=U11,wegetU6=1,U11=0,andthereisno“drop” whichproapproximationThisbetweenpairs(U1,U5),U5,U6),(U6,U9),(U9,U10),(U10,U11).valuecorrespondstotheachievementoftheminimalW(U)1andallowsoneoftheoriginalblemsolutionstobeconstructedusingrelations(7):isthesameastheinputsequence
Criteria(5)canberewrittenas
Asaresultoftheabovenotation,theefficiencycriterion(3) takesthefollowingform: withintheboundsU¯i∈{0,1},1i12,oftheform'svariables
Asaresultoftheabovenotation,theefficiencycriterion(3) takesthefollowing Notice that we can choose sets of consecutive vector U coordinatesthatarenotincludedintheschemeofconstraints (6):U2,U3,U4,U7,U8,andseparatelythecoordinateU12.


from any initial state to the generalizedstateshastheformaccordingtothecomplete transitionformulaforalinearautomaton.

Theproblemwasattemptedtobesolvedusingawell known separation and estimation method, which is part of the branch and boundmethodfamilycommonlyusedininteger
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 02 | Feb 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page957 controlefficiency.Thencondition(1)takesthefollowing whereshape: U I is the coordinate of the united vector of input actions,G(Ui,Ui+1)=0ifUI=Ui+1andG(Ui,Ui+1)=1ifUI =Ui+1,andkisthelengthofthedesiredsequenceofinput actions(itisassumedthatthisnumbershouldbeassmallas possible, since each new command takes time from the controllerandthesystemofaltitudelevelstocompletethe Thelanding).degreeofthemaincharacteristicmatrixAthatappears in (2) has been found to verify the generalized synchronizationcondition: Specifically,[A3]3=[0],implyingthatthisFSMisgeneralized synchronically in the first three coordinates and that all sequences of length three or more are generalized Thesynchronizing.system'stransformation
Thedispatcherchooseslogicalandsecurevariantsfromthe sequencesensuringthatthedevicereachesthesafecollection ofstatesJs,whichwouldavoidthedangerousproximityof differentaircraft. Asequenceofdirectivesisbuiltbasedonthesechoices.The phases of landing an aircraft are as follows: flight to the entrance to the waiting area; flight in the waiting area; departure from the waiting area; transition to the first turning point; flight in a circle (on a "box"); pre landing; alignment; standing; touch and run; taxi, according to aviationregulatorydocuments.
Thefuture.table displaying a real time example for better understandingofthesituationisasfollows:
Page
Thetablecontainsamodelexampleofthedirectiveschosen byadispatcherofthe“Bangalore Approach”centrebasedon the values of the input signals in the generalised synchronization series, based on the above approach and materialsfrom[16].(9). Fig 1:Thegeneralplanfortheroutinephaseofaircraft entryintotheairport'scontrolarea,includinglanding.
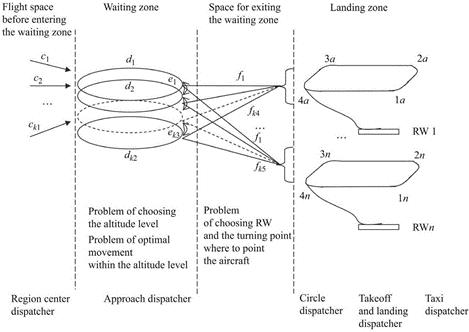
Table 1: Centeredonthesignalsfromthegeneralised synchronizationseries,amodelexampleofthe“Approach” dispatcherinstructions Inputsignalof theFSM Flight pointDispatchingnumber Directive U1(0) 6E477 “Bangalore VOBL Approach” Descend 2400 toKilo U2(0) 6E342 “Bangalore VOBL Approach” On Bravo, stay at5700 U3(0) AI804 “Bangalore VOBL Approach” 1800Descend by Charlie U4(0) AI127 “Bangalore VOBL Approach” Wait for the vector on RW 29right U1(1) 6E477 “Bangalore VOBL Approach” vectoringExpect on RW09left
In a real case, the air traffic control centre is likely to be dealing with a large number of aircraft performing manoeuvres as they approach the airport's area of responsibilityforlanding. Thefigureemploysthefollowingnotation:c1,...,ck1 entry intothewaitingarea;d1,...,dk2 waitingareaaltitudelevels; e1,...,ek3 transitions between altitude levels; f1,...,fk4 waitingareaexits;RW runway1a,2a,3a,4a,...,1n,2n,3n, 4n RWa,...,RWnturningpoints.
5. EXAMPLE

Asshownintheexamplebelow,theestablishedmodelcanbe interpretedasaformalizedexplanationofthecontrolprocess for a group ofaircraft during their landing in theairport's zoneofresponsibilityatstagessuchasentryintothezoneof responsibility,vectoring,flightinthewaitingarea,andsoon.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 02 | Feb 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | 958 andthesystemtransitionstothenecessarygeneralizedstate (1, 1, 1,... )T after this input series. Other problems have similarsolutions.
6. CONCLUSION When landing aircraft in uncertain states, a method for constructingdispatcher directiveshas been proposed. The method is based on a formalism for generalised synchronizationofFSMswithalineartransitionfunctionthat hasbeendeveloped. Thedispatcherproduceslandingdirectivesfromtheshortest generalisedsynchronizinginputsequencespresentedtohim bytheinformationandadvisoryframework.Thefindingsof the study can be used to build and improve simulators,as wellasforoperationalmanagementofaircraftlandingsinthe
U3(1) AI804 “Bangalore VOBL Approach” Distance40, on 1800 work thewithcircle120.8
REFERENCES
[2] Messaoud,M.B.(2021).Athoroughreviewofaircraft landing operation from practical and theoretical standpointsatanairportwhichmayincludeasingleor multiple runways. Applied Soft Computing, 98, 106853.K.Elissa,“Titleofpaperifknown,”unpublished.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 02 | Feb 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page959
[3] Enayatollahi, F., Atashgah, M. A., Malaek, S. M. B., & Thulasiraman, P. (2021). PBN based time optimal terminalairtrafficcontrolusingcellularautomata.IEEE Transactions on Aerospace and Electronic Systems, 57(3),1513 1523.
[5] Herasimov, S., MaksimPavlenko, E., & Lytvynenko, M. (2020).Aircraftflightroutesearchmethodwiththeuse ofcellularautomata.InternationalJournal,9(4).
U2(2) 6E342 “Ban VOBLgalore Approach” vectoringExpect on RW09left U3(2) AI804 “Bangalore VOBL Approach” Alpha 160, removal 100, RW descend29,to the2nd U4(2) AI127 “Bangalore VOBL Approach” Alpha 210, removal 125, RW descend07,to the3rd
[4] Abbass,H.A.A.,&Tang,J.T.(2018).Behaviorallearning of aircraft landing sequencing using a society of ProbabilisticFinitestateMachines.
U4(1) AI127 “Bangalore VOBL Approach” Alpha 210, distance 125, RW descend07,to 3rd U1(2) 6E477 “Bangalore VOBL Approach” Distance80, for 2000 work with the circle 120.8
[1] Lal, R., McKinnis, A., Hauptman, D., Keshmiri, S., & Prabhakar,P.(2021,July).FormallyVerifiedSwitching Logic for Recoverability of Aircraft Controller. In International Conference on Computer Aided Verification (pp. 566 579). Springer, Cham.M. Young, The Technical Writer’s Handbook. Mill Valley, CA: UniversityScience,1989.