
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page996 Self-Driving Car to Drive Autonomously using Image Processing and Deep Learning Bhupathi Nithish1 , Ankit Panda2 , Trishala Reddy3 , Vishwa Gohil4 , Ishita Kundaliya5 , Sasank Perumal6 ***
Abstract
Self drivingindependentvehiclesarethesolution forreinforcingmobilityintelligenceassociatedwithusing. Thisventuregivesaneffectivewayforimplementationofa self using automobile. Proposed work is primarily based mostlyonArtificialIntelligence,ComputerVisionandNeural Networks. In our assignment, we're the usage of many features together with mapping, monitoring and close by makingplans.Wecansuccessfullycreateavehiclethatcan demonstrate proper lane modifications, parking, and U activatesitspersonal.Theone of a typeenhancementswe are the usage of are barriers and reduce detection techniques,streetautomobiletracker,andcheckingonein everyofatypesitetrafficconditions.Thiswillmakearobust impartialself pushedvehicle.Itwilleffectivelyshowproper parkingallotment,lanechanges,andautomatedU turns.We candothosetheusageoftheobstacleandseveradiminish detection technique, the car tracker. Self driving motors integrate a selection of sensors to understand their environment, which consist of radar, lidar, sonar, GPS, odometry and inertial length gadgets. Advanced manage systemsinterpretsensorystatisticstoidentifyappropriate navigation paths, in addition to obstacles and applicable signage. Long distance trucking is visible as being at the leadingfringeofadoptingandimposingthetechnology.We use Artificial Intelligence for spotting and presenting the routewhichtheselfsustainingautomobilehavetoexamine forproperoperating.Additionally,adriverlessautomobile canreducethetimetakentoattainthedestinationbecauseit willtaketheshortestpath,avoidingthevisitorscongestion. Humanerrorsmaybeavertedtherebypermittingdisabled human beings (even blind human beings) to own their automobile.
1.INTRODUCTION
Thisventureisaproposedversiontoreapdriverlessmotors. Researchremainshappening;wehopethatthissimulated versioncanbeincorporatedasasoftwareinreallifestyles motorswithintheneardestiny.Tobuildareliabledeviceto increase theImageEnhancementwithoutlackoffine, The task can be extended and used with distinct training fashionstoincreasetheaccuracyofdetectingturnsbyway ofthecar.Ourselfsustainingcarisabletorunitselfonany generalized tune with the same education and validation accuracy. The system must accept enter pictures and optimizeforquickerprocessing.Togainmapping,tracking and neighborhood planning. Demonstrate proper lane modifications,parking,andU turnsonitsown.Theexclusive innovations we are the usage of are obstacles and curb detection techniques, street vehicle tracker, and checking distinctvisitorsconditions. Createarobustselfsufficientself drivenautomobile.Itwill efficientlyrevealrightparkingallotment,lanechanges,and automated U turns. We can do those the usage of the impedimentanddiversedecreasedetectiontechniques,the vehicletracker.Thisprojectisaproposedversiontocollect driverlessmotors.Researchcontinuestobeoccurring;we hope that this simulated model could be included as a softwareprograminactualexistenceautomobilesinsidethe closetofuture.Toassembleadependablesystemtoincrease theImageEnhancementwithoutlackofwonderful,Thetask can be prolonged and used with one of a type education fashionstoboomtheaccuracyofdetectingturnsbytheauto.
Demonstrateproperlanechanges,parking,andU turnson its very very own. The distinct improvements we're the usageofarebarriersandlessendetectionstrategies,street car tracker, and checking particular web site site visitors Createconditions.asturdyself maintaining self drivenautomobile. It will efficiently monitor proper parking allotment, lane changes,andautomatedU turns.Wecandothesetheuseof theobstacleandvariousreduceagaindetectionstrategies, theautomobiletracker..
1.1 SCOPE OF THE PROJECT: MOTIVATION
Our self reliant automobile is able to run itself on any generalized song with the same schooling and validation accuracy.Thegadgetoughttoacceptenterpicsandoptimize for faster processing. To attain mapping, tracking and neighbourhoodplanning.
TheSystemmustbeturninginEnhancedphotoandscaledto makeitavailabletoabsolutelyeveryone
Researchremainstakingplaceandmassesofheapsoffacts scientistsandartificialintelligencescientistsarejoggingan awesome manner to convert this software version into actuallifestylesutilityjustsocarscanendupdriverlessand there will be lesser rule breaks and optimistically lesser street Further,mishaps.thechallengecanbeprolongedandusedwithone of a kind education models to growth the accuracy of detecting turns with the aid of the auto. Our autonomous vehicleisabletorunitselfonanygeneralizedsongwiththe sametrainingandvalidationaccuracy.
Tobuildamachinewhichsuggeststhemaximumaccurate outcomesinconjunctionwithafewinformationofEnhanced image. The machine have to provide the natural greater

WORKING When the polar perspective of the lane line is inside the detectionvicinity,thepositionofthelanelinemaybespeedy and appropriately detected. However, while the image is shiftedinaflip,lanealternateorcameraposition,thelane line without problems exceeds the detection location, in orderthattheoutcomesseemlikesomedeviations.
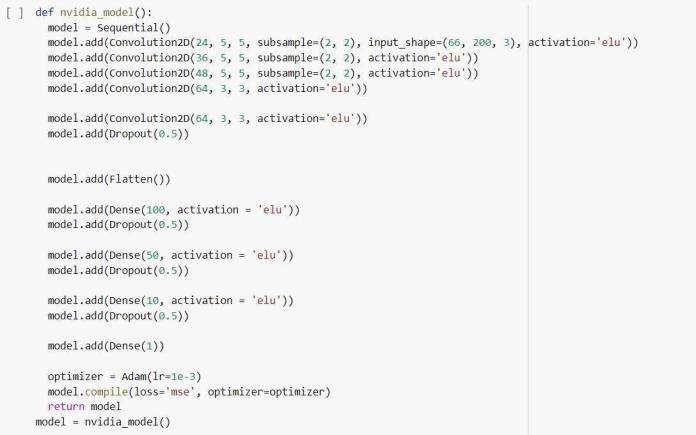
InconventionalHoughtransform,everypointneedsto be traversed at each angle, which is time ingesting. But, the modifiedHoughremodelisusedtoperformtransformation atthe vanishingfactorand the restrictedpixelsaroundit. Andimprovetheactualtimeoverallperformanceoftheset of Werules.trainedacustomConvolutionalNeuralNetwork.Itisa deep neural community. We declare the model to be sequentialandadd5Convolution2D,weadditionallyupload 4dropoutlayersand4denselayerstothenetwork.Asingle flattenlayerisintroducedtoconverttheimagematrixtoa one dimensional array. Built essentially by means of followingthegivencharacteristics: WeeducatedacustomConvolutionalNeuralNetwork.Itisa deep neural community. We claim the version to be sequentialanduploadfiveConvolution2D,weadditionally add 4 dropout layers and four dense layers to the community. A unmarried flatten layer is added to convert theimagematrixtoaone dimensionalarray.Builtbasically by following the given traits:We skilled a custom Convolutional Neural Network. It is a deep neural community.Weclaimthemodeltobesequentialandadd5 Convolution2D,wealsoupload4dropoutlayersand4dense layerstothenetwork.Aunmarriedflattenlayerisbroughtto convertthephotographmatrixtoaone dimensionalarray. Builtbasicallybywayoffollowingthegiventraits: The Hough Transform (HT) is a virtual photo processing approachforthedetectionofshapeswhichhasmultipleuses thesedays.Adisadvantageofthistechniqueisitssequential computational complexity, particularly when a single processorisused.AnoptimizedsetofrulesofHTforstraight tracesdetectioninanpictureissuppliedinthisnewsletter. Optimizationisrealizedbymeansofusingadecomposition oftheenterpicturethesedaysproposedviavitalprocessing unit (CPU), and the technique called segment decomposition[12].
WHY WE ARE RELYING ON HOUGH TRANSFORMATION
MAIN PRINCIPLE BEHIND
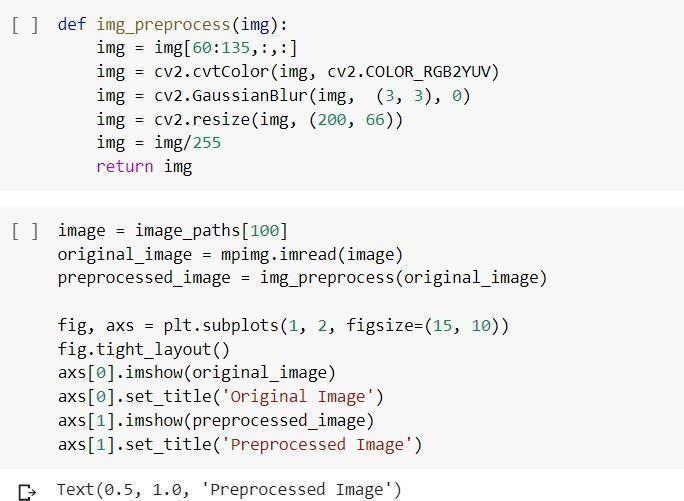
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page997 suitedoutputofthephotowithoutlosingitspleasantwhile processingpicturesinrealtime.. Finally,completecontentmaterialandorganizationalediting beforeformatting.Pleasetakenoteofthefollowingobjects whenproofreadingspellingandgrammar: 1.2 Background We use the NVIDIA version which is developed by the NVIDIA business enterprise. The model is present in the model’slibraryinpython.Itisadeepneuralcommunity.We declare the version to be sequential and upload five Convolution2D,weadditionallyuploadfourdropoutlayers and4denselayerstothecommunity.Asingleflattenlayeris broughttoconvertthephotomatrixtoa one dimensional array.Builtessentiallybyfollowingthegivencharacteristics: 2. DATASET: To accumulate the records udacity, has a car simulator in whichamusicissuppliedandweareabletopowertheauto at the track manually. The simulator has a file button. So, evenasweclickittheoptionincludespickoutafolderthen at the same time as we start using the car at the song the simulator stores the image at every on the spot and also shopsthecarguidanceattitudesimilartoeveryimage.The vehiclesimulatorhas3cameraswhichshoppicturesasleft, right and centre. For having a proper well spaced dataset containingalltimesandangles,itisrecommendedtotakeat theleasttake3lapsinforwardandoppositedirectiononthe music. 2.1 Data Preprocessing
Mostroadsontheroadareessentiallystraight,andthereare few sharp bends in the curve. Therefore, in the lane detectionandmonitoring, theHoughtransform isused to come across the line and decide the approximate position andshapeofthelane. Then decide the deviation route of the lane by using the slopeofthelane,andthenlocatethecurveapartofthelane.
The simple concept of the monitoring is that the car is a continuous displacement motion system . During the advancementofthecar,thetradeofthelanelineisalsoa non stop alternate. This exchange is reflected inside the slopeof thelaneline. The slopeof the laneline inside the framesofthethefrontandrear pixaren'tmuchexclusive from the location of the lane line. Therefore, the 2 frames beforeandafterthemanipulateareincomparison.Theslope of the lane line within the middle is restricted near the formerly detected lane line place. This is the basic idea of monitoring. Finding lane traces in the area of interest can significantlyreducethequantityofphotographprocessing.
Deleting high frequency dataset values which make the versionbiased: Since maximum of the instances we pressure through the centreofthetrackthedatasetincludesaexcessivenumber of0 degreesteerageanglewhichmightalsomaketheself riding simulator biased in the direction of predicting 0 degree attitude if you want to cause version predicting 0 attitude and cause crash. So first we drop a few 0 degree perspectivevalues.
Supportvectormachines(SVM)withhistogramsoforiented gradients (HOG), fundamental element evaluation (PCA),
Generally,theimagesacquiredbyusingthesuperiormotive pressure helpsystems(ADAS)arerepletewithanarrayof statistics from the encompassing surroundings. This facts needstobefilteredtounderstandtheapplicablesnapshots containing a particular magnificence of gadgets. This is wherepatternpopularityalgorithmsinput.
Also referred to as records reduction algorithms, sample popularity algorithms are designed to rule out unusual informationpoints.Recognitionofpatternsinafactssetis ancrucialstepinadvancethanclassifyingthegadgets. Thesealgorithmshelpinfilteringthefactsacquiredthrough thesensorsbyusingdetectingitemedges,andbecomingline segments and round arcs to the rims. Pattern recognition algorithmscombinethestreetsegmentsandcirculararcsin massesofdistinctstrategiestoformtheremainingfunctions forrecognizinganitem.
Paper three.1DescriptionEXISTINGSYSTEM:
Regression algorithms are used explicitly for predicting events.Bayesianregression,neuralcommunityregression, and choice wooded area regression are the 3 critical varietiesofregressionalgorithmsappliedinself• usingcars.
Regression analysis is especially depending on 3 center metrics:
2) PatternRecognitionAlgorithms(Classification)
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page998
1) RegressionAlgorithms
Self ridingcarMachineLearningalgorithmsarecommonly dividedinto4categoriesinsidetheexistingstructures
● Thesortofmountedvariables.
Inregressionevaluation,theconnectionamongst orgreater variablesisanticipated,andtheeffectsofthevariablesarein evaluationonincrediblescales.
Inthisway,theaccuracyofthedetectionofthelanelinecan be ensured, and there's no severe errors in the detected curve.TheHough line detection method is accurate and simple, andthecurvedetectionmaybeperformedafterincluding theVanishingfactortrackingalgorithm. Aself drivingautomobileisaautomobilethatiscapableof sense its surroundings and power with out human intervention. Self riding cars can experience environment the use of many approaches like lidar, radar, GPS, digital camera. Biggest gain of self driving cars is the decreased range of injuries. If such cars are widely to be had and engineered well can also save gasoline with a purpose to cause lesser pollutants. In recent duration there has been splendidamountofdevelopmentinself ridingvehiclearea which is attracting huge range of customers frequently becauseofthebenefitsitaffords[13] We can efficiently create a automobile that could display rightlanechanges,parking,andU turnsonitsveryown.The exclusive innovations that characteristic are barriers and decreasedetectionmethods,roadcartracker,andchecking one of a kind traffic conditions. This will make a robust autonomous self pushed vehicle. It will correctly display properparkingallotment,lanemodifications,andautomated U turns. We can do these the usage of the obstacle and numerous curb detection method, the car tracker. Autonomous motors have numerous blessings over guide motors like fewer visitors accidents, smart choice making simplytocallsome[14]. Themostnormallyoccurringfailuresincludedthefailureto stumbleonlanesanduncomfortablespeedadjustmentsof the vehicle. Additionally, a majority of the drivers emphasisedtheimportanceofbeingalertatthesametime as using with self sustaining capabilities and privy to the restrictionsofthecontemporarytechnology.Ourforemost contributionistoprovideaphotoofattitudesandreviewsin thedirectionofsemi autonomousdriving,revealingthata fewdriversadoptingthosecapabilitiesmightnotperceive selfsustainingusingasrisky,eveninansurroundingswith normalautomationfailures[15]. For that matter, it is essential to outline what exactly is thoughtasanselfreliantcar(AV)inthisreport.Whilethe technologycanbetailoredtoawonderfulvarietyofdifferent vehicle kinds, right here road primarily based shipping is takenintoconsiderationparticularly,coveringvariationsof self drivinggenerationtoprivatemotorsandpublicdelivery solutions. In that regard the phrases “autonomous”, “self riding”and“driver muchless”areusedinterchangeablyasis frequently the case inside the present literature in distinctiontoCVs(conventionalautomobiles).Furthermore, it needs to be described on which era scope the review addresses. While the 11 technological development is alreadymakingdevelopment,theadoptionofself usingcars issimplybeginning.Therearelotsofscenariosonhowthe path towards a huge scale use of AVs will look like, with technological,societal,criminalandfinancialobstacles[16].
● Thevarietyofimpartialvariables
● Theshapeoftheregressionline. Regression algorithms use the repetitive factors of an surroundings to form a statistical version of the relation amongsta selectedphotoandthearea of a specific object withinthephoto.Thestatisticalmodelcanofferrapidonline detection thru photo sampling. Gradually, it may boom to find out about special devices as well, without requiring substantialhumanintervention.
Three.3PROPOSEDSYSTEM: NeuralNetworkRegressionAlgorithms
Bayes choice rule, and okay nearest neighbor (KNN) are some of the maximum generally used sample popularity algorithmsin self theusageofmotors.
Decisionmatrixalgorithmscompriseindependentlyskilleda couple of choice models whose predictions are mixed to generate the general prediction while minimizing the possibilityoferrors.
➢ Availableeducationdata:
As stated in advance than, an surrender to cease gaining knowledge of device specially, requires to be fed a big quantityofschoolingdata,inordertoexpectasmanyusing situations as feasible and to fulfil a minimum safety requirement.Somedeclarethatatleastathousandmillion kilometers of education statistics from realistic street scenariosarewishedthatallowsyoutomakeconclusions aboutsafetyoftheauto.Notbestthat,thefactsdesirestobe numerousenoughforittobebeneficial(usingonekilometer athousandmilliontimesfromsidetosidereceived’tdothe project!)
Three.2 DRAWBACKSINEXISTINGSYSTEM: ➢ Processingstrength: Firstofall,forthereasonthatdeepgettingtoknowcallsfor the type of excessive level of computing electricity, a completelypowerful“thoughts”iswantedtodealwiththe bigstatisticstalentsandprocessingnecessities.Currently, the most suitable era is the so called GPU (graphical processing unit), because of the fact that it is designed to controlheavyphotographprocessingobligations(recounted fromforinstancethecomputergamingindustry).Currently the agencies Nvidia and Intel are on their way to position themselvesasleadersimpartingthe“brains”forthesmart vehiclemarketplace.However,it'sfarthoughaundertaking tohavealow feeGPUthatoperatesinsidethepowerintake andspecificlimitations,includingheatmanagement,thisis requiredforamarket gearedupvehicle.Moreover,agencies despite the fact that warfare with bandwidth and synchronizationproblems.
ClusterAlgorithms
➢ Safety:
DecisionMatrixAlgorithms
Four)
Three)
Cluster algorithms excel at discovering shape from informationelements.Itmightalsoadditionallyappearthat the images received via the ADAS aren’t clear, or it can additionally stand up that category algorithms have not notedfiguringoutanobject,therebyfailingtoclassifyand document it to the device. This might also moreover take placeduetothephotosbeingofverylow decisionorwith veryfewfactsfactors.Insuchconditions,itturnsintohard for the system to detect and locate items inside the environment.Clusteringalgorithmsdefinethe elegance of problemandclassoftechniques. Generally, clustering strategies are mounted the usage of centroid based and hierarchical modeling methods. All clustering techniques interest on leveraging the inherent structures within the facts to best set up the records into companieshavingthegreatestcommonality.K approachand multi classneuralnetworksarethe2maximumextensively usedclusteringalgorithmsforindependentmotors.
Decision matrix algorithms are basically used for choice making. They are designed for systematically identifying, reading,andscorethegeneralperformanceofrelationships betweensetsofvaluesandfactsinthem.Themostwidely usedselectionmatrixalgorithmsinselfmaintainingcarsare gradientboosting(GDM)andAdaBoosting. Thesealgorithmsdecidetheactionsoftheself theusageof vehicle.So,whetherornolongertheautowishestotakea leftorarightturn,whetheritwishestobrakeorboostup, the solution to such questions is determined thru the accuracy of these algorithms concerning category, reputation, and prediction of the objects’ next movement.
Oneoftheprecepttraumaticconditionswithprotectionof deepneuralnetworksisthefactthattheyareriskybeneath so called hostile perturbations. For instance, minimal changesindigitalcamerapics,suchareresizing,cropping andthealternateoflightingfixturessituationsmayreason the device to misclassify the photograph. Additionally, in fashionable,safetyguaranteeandverificationtechniquesfor systemstudyingarepoorlystudied.Theprevailingcarsafety elegant of ISO26262, does not have a manner to outline safetyforself gainingknowledgeofalgorithmssuchasdeep studying.Hence,theremaybethoughnowaytostandardize thesafetyelementbut,duetotheshortpaceofcutting edge era. A high quality instance of a safety failure is the 2016 Teslavehicle pilottwistofdestiny,inwhichthesensorsof thevehiclehavebeencombinedwiththeaidoftheusageof thesolarandthegadgetdidnotrecognizethetruckcoming from the proper, principal to the crash [9]. This indicates thatplentystilldesirestobeinvestigatedearlierthanwe're abletoconcludethatthecurrentconfigurationofa(inpart) self usingvehicleisrelaxed.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page999
● Theshapeoftheregressionline.
● Theformofbasedvariables.
Thissortofalgorithmisproperatpredictingactivities.The Regression Analysis evaluates the relation among 2 or greatervariablesandcollatetheoutcomesofvariableson tremendousscalesandarepushedcommonlywiththeuseful resourceofthreemetrics:
3.Five. ALGORITHM’SANDAPPROACH: The tool studying algorithms are loosely divided into 4 instructions: choice matrix algorithms, cluster algorithms, patternrecognitionalgorithmsandregressionalgorithms. Oneclassofthemachinelearningalgorithmscanbeapplied tocarryout2ormoresubtasks.Forinstance,theregression algorithmscanbe appliedforobjectlocalizationinaddition toitemdetectionorpredictionofthemovement.
stopinformationintovariableslike
Thequantityofindependentvariables. The pix (camera or radar) play a big role in ADAS in actuationandlocalization,evenasforanysetofrules,the largest venture is to broaden an photo based version for feature desire and prediction. The repeatability of the surroundings is leveraged thru regression algorithms to createastatisticalversionofrelationamongthegivenitem’s characteristic in an image and that photo. The statistical model, with the aid of using permitting the photograph sampling,offersrapidon out offline. It can be prolonged furthermore to unique gadgets without the requirement of sizeable human modeling.Anobject’scharacteristicisoncemorebywayof mannerofanalgorithmbecausetheonlinestage’soutput and a consider at the object’s presence. The regression algorithms can also be implemented for quick prediction, lengthylearning.Thissortof regressionalgorithmsthatmay be applied for self using cars are choice woodland regression, neural community regression and Bayesian regression,amongstothers.
linedetectionandmaybeobserved
Theneuralnetworksarecarried outforregression,classorunsupervisedgainingknowledge of. They business enterprise the facts that is not labeled, classify that records or forecast continuous values after supervisedschooling.Theneuralnetworksgenerallyusea shapeoflogisticregressionwithintheverylastlayerofthe internettoalternatenon 1or0. We may be the usage of Google Collaboratory to put in writing our code in Python3 for this assignment. Google Collaboratory is a loose cloud platform in which we can writecodesanditadditionallysupportsGPUwhichmakesit plentyquickerthaneveryotherpriceyPCorlaptopwithout purchasing for it because of this making it suitable for ArtificialIntelligenceandMachinegettingtoknow
Three.4ADVANTAGESOFPROPOSEDSYSTEM: ✓ Accuracymaybeexcessive ✓ Pictureexquisitewillnownotbecompressed. ✓ Willbecapableofraintheautoandusetheversion inanygeneralizedsurroundings.
3.5.1 :DecisionMatrixAlgorithms
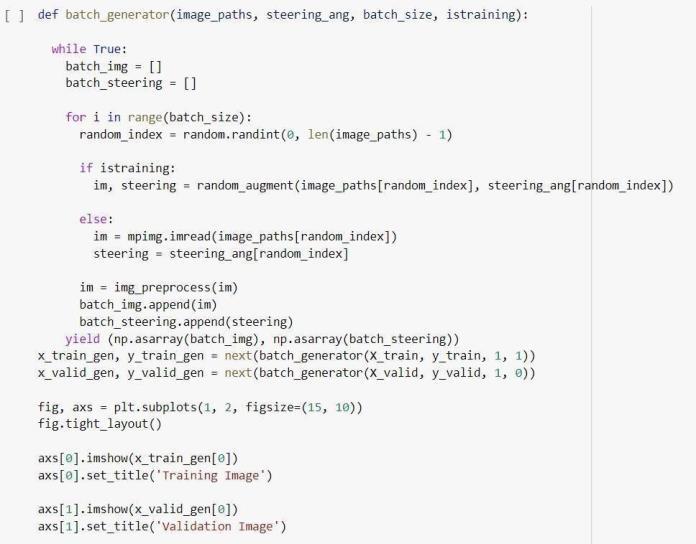
➢ 5.2.1.SEQUENCEDIAGRAM Figure6.1.6BatchGenerator: Figure6.1.7NvidiaModel:
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1000 ●
The desire matrix set of rules systematically analyzes, identifiesandcoststheoverallperformanceofrelationships most of the units of information and values. These algorithms are majorly implemented for choice making. Whether a vehicle wishes to brake or take a left turn is primarilybasedmostlyontheextentofselfnotiontheones algorithmshaveonrecognition,classandpredictionofthe followingmotionofgadgets.Theselectionmatrixalgorithms are models composed of severa selection models knowledgeable independently and, in some way, these predictionsaremixedtomaketheoverallprediction,atthe equaltimeasloweringtheopportunityoferrorsinchoice making.AdaBoostingisthemaximumnormallyusedsetof rules.
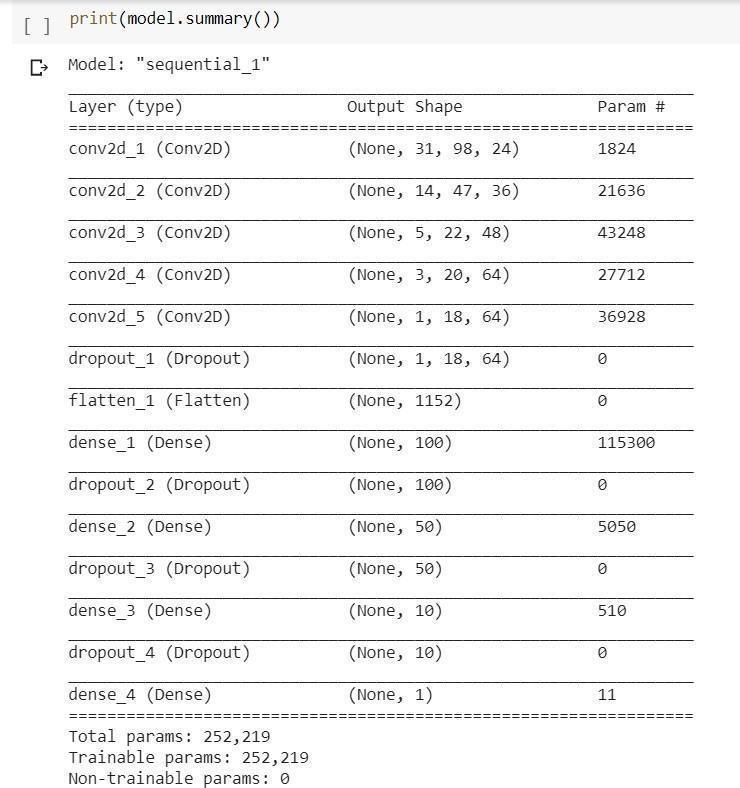
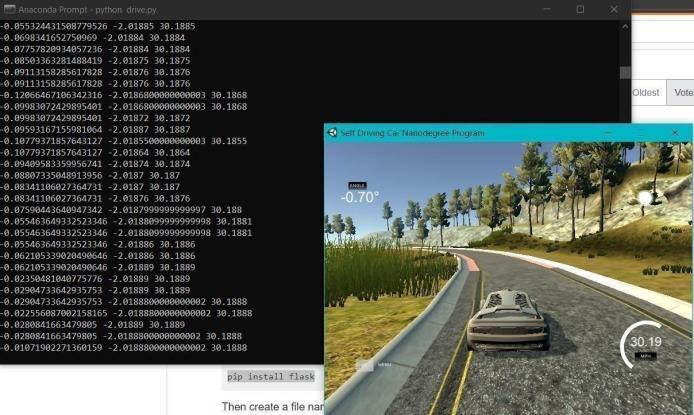
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1001 Figure6.1.8Modelsummary: VII. RESULTS 7.1. TheRESULTSplotofLossvsnumberofepochsshowsthatthereisa sufficientreductionoftrainingandvalidationlossafter10 epochs. The training loss was obtained as 0.0343 and the validation loss as 0.0275. This proves that our model can alsobetestedon anysimulatortrackotherthantheonewe usedfortraining. Figure7.1.1Outputscreenshots DriveCoordinatesareplottedinrealtime( )indicatesleft turnand(+)right 0.0488455705344677turn: 2.018830000000000330.1883 0.0488455705344677 2.0187930.1879 0.06489957123994827 2.0187930.1879 0.05687129124999046 2.018799999999999730.188 0.05687129124999046 2.018799999999999730.188 0.05891359969973564 2.018809999999999830.1881 0.059988927096128464 2.0187530.1875 0.07196944206953049 2.0187830.1878 0.06476251780986786 2.018809999999999830.1881 0.05087998881936073 2.018799999999999730.188 0.05087998881936073 2.0187830.1878 127.0.0.1 [06/Jun/202007:23:57]"GET

International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1002 /socket.io/?EIO=4&transport=websocketHTTP/1.1"2000 Figure100.1670207.1.2Fittingthemodel(witheachepochsummary)
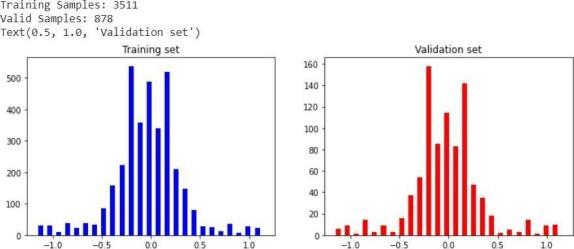
Figure8.1.2Datasetafterdeletingsomeextra0degree anglevalues
Figure7.1.3Losscomparisonbetweenvalidation data TRAINING TESTING TYPESOFTESTING
and training
ToDATASET:gatherthe data udacity, hasa carsimulatorin whicha track is provided and we can drive the car on the track manually.Thesimulatorhasarecordbutton.So,whenwe clickittheoptioncomestoselectafolderthenwhenwestart drivingthecaronthetrackthesimulatorstoresthepicture at each instant and also stores the car steering angle corresponding to each image. The car simulator has 3 cameras which store images as left, right and center. For havingaproperwell spaceddatasetcontainingallcasesand angles, it is recommended to take atleast take 3 laps in forwardandreversedirectiononthetrack.
VIII.
Trainingsetandvalidationsetsplittingofdatasetforbetter modelcreationandpreventionofoverfittingoftrainingdata: Ifwedonotmakeavalidationsetthenthemodelwilloverfit
AND
DATA DeletingPREPROCESSING:highfrequency dataset values which make the modelbiased:Sincemostofthetimeswedrivethroughthe centreofthetrackthedatasetcontainsahighnumberof0 degree steering angle which may make the self driving simulatorbiasedtowardspredicting0 degreeanglewhich willleadtomodelpredicting0angleandleadtocrash.So firstwedropsome0 degreeanglevalues.
Figure8.1.1Originalsteeringangledataset(Frequencyof eachangleindataset)
8.1.
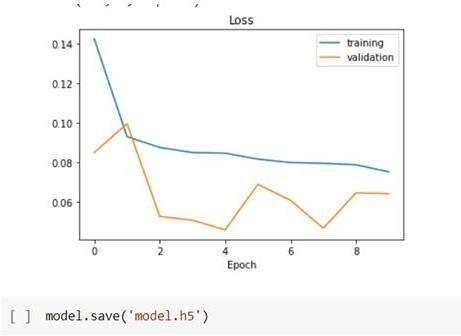
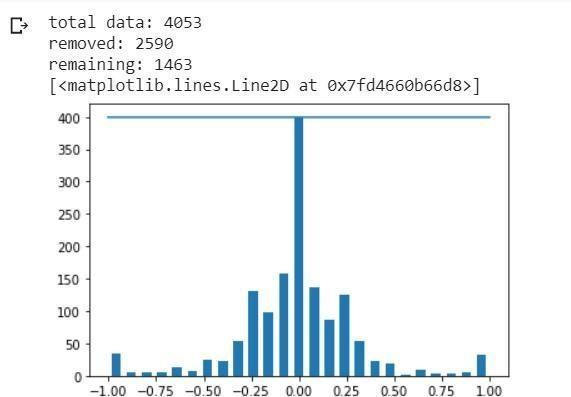
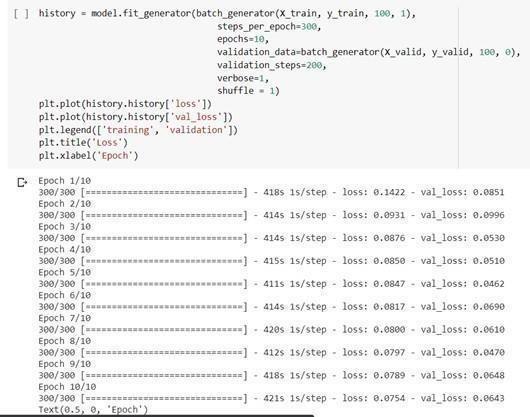
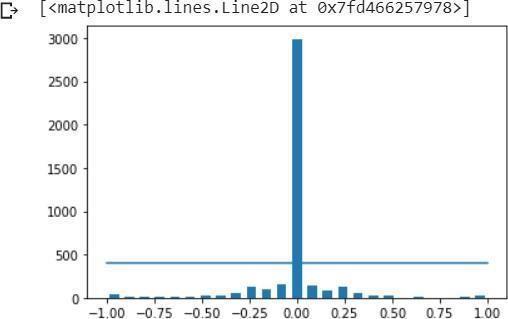
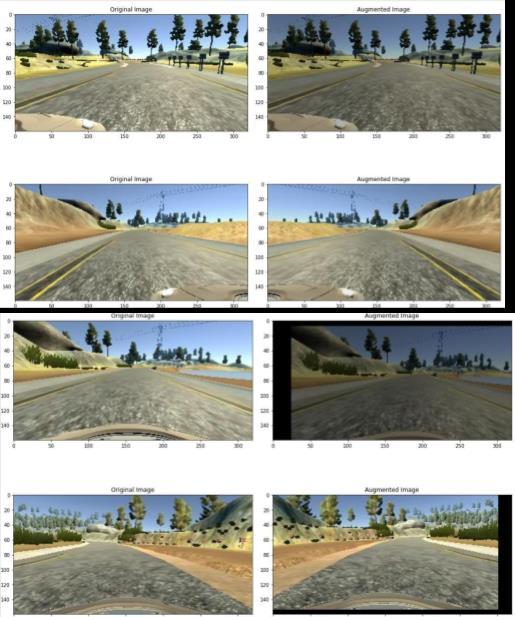
Figure8.2.1Augmentingvariationsofimages
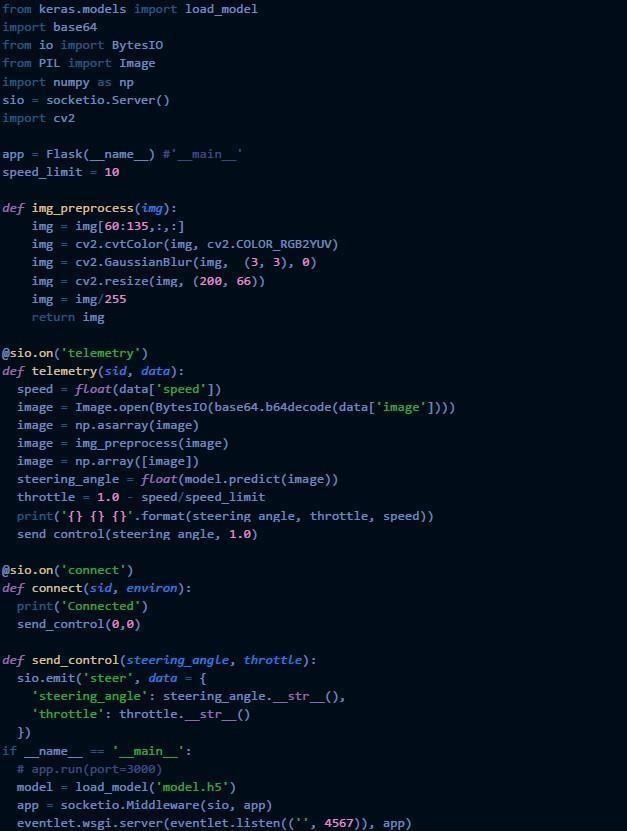
1. We established a flask web server using SocketIO and 2.PyFlask.ThesimulatorwasconnectedtotheserverusingSockets
3.Realtimedatawascommunicatedbetweenthesimulation environmentandthewebserver
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1003 andwon’tworkwellforgeneralizedtracks.Itwillonlywork wellforthetrackonwhichthedatasetiscreated. Figure8.1.3TrainingsetvsValidationSet
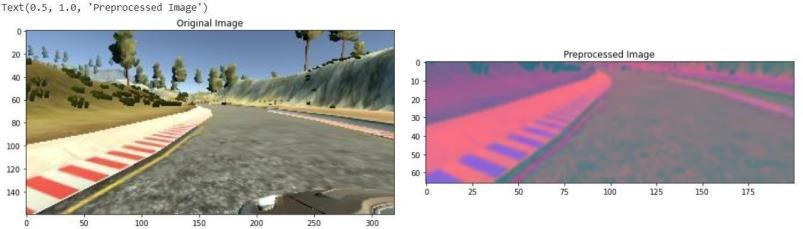
Figure8.2.2Pre processingtheimage
4.Themachinelearningmodelimportedasmodel.h5was therefore used to analyses the received packets and accordinglyrespondtothechangesintheenvironment,so thatthecarcandrivecollisionfree. Figure8.2.3CodeforsocketIOandFlaskwebserver
TheimagesinthedatasetareallRGBimagessoforeaseof trainingthemodeltheimagesareconvertedtoYUVformat. YUVcolor spacesareamoreefficientcodingandreducethe bandwidthmorethanRGBcapturecan.Theimagesarealso blurredusingGaussianblurfunctionofopenCVandresized sothatunimportantpartssuchasbackgroundsceneryare cropped out. Then each pixel is divided by 255 so that all pixels get equal priority as pixels with high values get unnecessarypriority.Dividingby255will reduceall pixel valuesto0or1.
Connecting the model and establishing real time communicationusingsocketIOandFlaskwebserver:
Further, the undertaking can be extended and used with uniqueeducationmodelstogrowththeaccuracyofdetecting turnsbywayoftheautomobile.Weacquiredasolidversion whichwhensimulatedtravelledatamaxspeedof30km/hat thetune,additionallytheattitudeoftiltchangedintovarying amongpositiveandbadforrightandleftturnsrespectively andadditionallymadepositivethatitavoidedall possible collisions and we were additionally able to generate positional andangularinformation ateveryfactor intime based at the polar and Cartesian coordinates of the car withinthesimulatedenvironment.Inthiswaywehavebeen capable of obtain facts in a CSV layout that could later be used for self riding research and undertaking numerous analyticsexperimentsinfuture.
Inaddition,othershavearguedthathumandriversdriveina wastefulway brakinghard,acceleratinghard,idlingthe engine, all of which burn up gasoline which a pc could Butavoid.asself usingautomobileshaveinchedclosertoreality, maximum of those claimed benefits have began to appearancelessinalllikelihood.
X. FUTURE WORK
One take a look at trying to estimate the consequences of self using motors on automobile use conduct simulated a ownfamilyhavingaself usingvehiclebyusingpurchasing themtohaveachauffeurforperweek,andtellingthemto deal with the chauffeur service the manner they’d treat havingavehiclethatmightdriveitself.Ourversionisskilled anddesignedtoworkwithanygeneralizedmusicandmay be used for gaming studies and similarly self riding and autonomouseraresearch.Itcanbeusedinsimulationsto conductvariousresearchinschoolsandtestedwithgaming engineswiththeintentiontogiveyoubetterin sportAIfor various multiplayer games, and different simulation softwareprogram.
10.1. REFERENCES
CONCLUSION
Much of the trouble is the want for plenty of training information.Theidealwaytotrainaself usingvehiclemight betorevealitbillionsofhoursoffootageofactualdriving, and use that to train the pc desirable driving conduct. Modernsystemstudyingsystemsdoclearlywellwhenthey have ample data, and very poorly after they have most effectiveatouchbitofit.Butamassinginformationforself ridingcarsisluxurious.Andduetothefactthatafewevents are uncommon witnessing a vehicle coincidence in advance,say,orencounteringparticlesonthestreet it’s viable for the auto to be out of its intensity as it has encounteredastateofaffairssoeverynowandtheninits schooling Carmakersrecords.haveattemptedtogetaroundthisinmassesof ways.They’vedrivenmoremiles.They’veeducatedthecars insimulations.Theyonoccasionengineerprecisesituations if you want to get greater training facts about the ones situationsforthecars.
There’s not tons proof that computer systems are dramatically greater gasoline green drivers than people.
There’sonesmalllookatsuggestingadaptivecruisecontrol improvesefficiencyatouch(5to7percentage),butthere’s little else beyond that. Furthermore, researchers have examined the results of more gas green vehicles on miles traveled and located that, below many circumstances, humansdrivemorewhenautomobilesgetextragas efficient soself ridingmotorshavinghighergasefficiency won't suggestthattheyproducedecreaseemissions.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1004 IX. CONCLUSION AND FUTURE WORK
Katrakazas,MohammedQuddus,Wen HuaChen, Lipika Deka,Real time motion planning methods for
[1]Morris B, Doshi A, Trivedi M. Lane change intent prediction for driver assistance: On road design and evaluation[C]// Intelligent Vehicles Symposium. IEEE, 2011:895 901. [2]Paula M B D, Jung C R. Real Time Detection and ClassificationofRoadLaneMarkings[C]//XxviConference onGraphics,PatternsandImages.IEEEComputerSociety, 2013:83 90. [3]Kaur G, Kumar D, Kaur G, et al. Lane Detection Techniques:AReview[J].InternationalJournalofComputer Applications,2015,112(10):4 8. [4]DorumOH,LynchJD,GnedinM.Creatinggeometryfor advanced driver assistance systems: US, US8762046[P]. [5]Bottazzi2014. V S, Borges P V K, Stantic B, et al. Adaptive RegionsofInterestBasedonHSVHistogramsforLaneMarks Detection[M]// Robot Intelligence Technology and Applications2.SpringerInternationalPublishing,2014:677 [6]Christos687.
Some advocates have argued that self riding automobiles will be top for the surroundings. They claim they could reduce car trips with the aid of making car possession unnecessaryandtransitioningsocietytoaversionwherethe majoritydon’tveryownacarandsimplynameforonewhen theyneedone.
Thisventureisaproposedmodeltoattaindriverlesscars. Research remains going on; we hope that this simulated version can be integrated as a software in real life cars within the near destiny. Research continues to be taking placeandthousandsandthousandsofrecordsscientistsand artificial intelligence scientists are working on the way to convert this software version into real lifeutility in order thatautomobilescanendupdriverlessandtheremightbe lesser rule breaks and hopefully lesser street mishaps.
[11]SatzodaRK,SuchitraS,SrikanthanT(2008)Parallelizing theHoughtransformcomputation.IEEESignalProcessLett 15:297 [12]Yam300.Uicab,R.&López Martínez,José&Trejo Sánchez, Joel&Hidalgo Silva,Hugo&Gonzalez,Sergio.(2017).Afast HoughTransformalgorithmforstraightlinesdetectioninan image using GPU parallel computing with CUDA C. The JournalofSupercomputing.73.1 20.10.1007/s11227 017 2051 [13]Heejun5.
Choi, Travis Teague, and Tanner Luce. 2020. Positivecycleofintegratingteachingandresearch:machine learning self driving car. J. Comput. Sci. Coll. 35, 7 (April 2020),74 87. [14]Rao,Qing&Frtunikj,Jelena.(2018).Deeplearningfor self driving cars: chances and challenges. 35 38. [15]Murat10.1145/3194085.3194087.DikmenandCatherine M. Burns. 2016. Autonomous Driving in the Real World: Experiences with TeslaAutopilotandSummon.In<i>Proceedingsofthe8th InternationalConferenceonAutomotiveUserInterfacesand Interactive Vehicular Applications. Association for Computing Machinery, New York, NY, USA, 225 228. [16]Hörl,DOI:https://doi.org/10.1145/3003715.3005465Sebastian&Ciari,Francesco&Axhausen, Kay. (2016).Recentperspectives ontheimpactofautonomous vehicles. [17]Gandikot10.13140/RG.2.2.26690.17609.a,Rohit.(2018).Computer Vision for AutonomousVehicles.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1005 autonomous on road driving: State of the art and future research directions, Transportation Research Part C:Emerging Technologies, Volume 60,2015,Pages 416 442,ISSN0968 090X [7]WeiweiChen, WeixingWang,KevinWang,Zhaoying Li, HuanLi,ShengLiu,Lanedeparturewarningsystemsandlane line detection methods based on image processing and semantic segmentation: A review, Journal of Traffic and Transportation Engineering (English Edition), Volume 7, Issue6,2020,Pages748 774,ISSN2095 7564 [8]Narote, Sandipan & Bhujbal, Pradnya & Narote, Abbhilasha & Dhane, Dhiraj. (2017). A Review of Recent AdvancesinLaneDetectionandDepartureWarningSystem. PatternRecognition.73.10.1016/j.patcog.2017.08.014. [9]Duda RO, Hart PE (1975) Use of the Hough transformation to detect lines and curves in pictures. CommunACM15(1):11 15. [10]Comparison of Edge Detection Technique for Lane Analysis by Improved Hough Transform Muhamad Lazim Talib1,XioRui2,KamarulHawariGhazali2,Norulzahrah Mohd.Zainudin1,andSuzaimahRamli1.
https://doi.org/10.1007/978Science,inRobiAnalysisS.[22]TalibO.a[21].15.DOI:https://doi.org/10.1145/361237.361242Commun.Hough[20]Rich2021,chainminimizationusingdeepreinforcementlearningandMarkovmodel,ElectricPowerSystemsResearch,Volume192,106962,ISSN03787796ardO.DudaandPeterE.Hart.1972.Useofthetransformationtodetectlinesandcurvesinpictures.ACM15,1(Jan.1972),11ConvolutionalNeuralNetworkforaSelfDrivingCarinVirtualEnvironmentMohamedA.A.Babiker;MohamedA.Elawad;AzzaH.M.AhmedM.L.,RuiX.,GhazaliK.H.,Mohd.ZainudinN.,Ramli(2013)ComparisonofEdgeDetectionTechniqueforLanebyImprovedHoughTransform.In:ZamanH.B.,nsonP.,OlivierP.,ShihT.K.,VelastinS.(eds)AdvancesVisualInformatics.IVIC2013.LectureNotesinComputervol8237.Springer,Cham.3319029580_1
[19]Tawfiq M. Aljohani, Ahmed Ebrahim, Osama Mohammed,Real Time metadata driven routing optimization for electric vehicle energy consumption
[18]Memon, Qudsia & Ahmed, Muzamil & Ali, Shahzeb & Rafique, Azam & Shah, Wajiha. (2016). Self driving and driverrelaxingvehicle.10.1109/ICRAI.2016.7791248.