
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 05 | May 2024 www.irjet.net p-ISSN:2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 05 | May 2024 www.irjet.net p-ISSN:2395-0072
Abisudh KS 1 ,Abhinand V 2 , Abhin Chandra C 3 . Mohammed Safwan PM4 , Jasmine P 5 , 1234Graduate Students, 5Assistant Professor, Department of Electrical and Electronics Engineering, AWH Engineering College, Calicut, Kerala,India.
Abstract The integration of self-balancing technology and adaptive aerodynamics in electric motorcycles represents a significant advancement in both safety and performance within the automotive industry. This innovative concept aims to enhance rider stability and control while simultaneously optimizing aerodynamic efficiency for improved energy consumption and handling characteristics. This system will be especially useful in emergency braking situations, helping to reduce stopping distances and prevent accidents. the integration of selfbalancingtechnologyandadaptiveaerodynamicsinelectric motorcycles represents a groundbreaking approach to redefining the future of two-wheeled transportation. By prioritizing safety, performance, and sustainability, this innovative concept promises to revolutionize the riding experience and pave the way for a new era of electric mobility.
Key Words: Self balancing, Adaptive Aerodynamics, Gyroscope, PID controller, Micro controller
1.INTRODUCTION
The global automotive landscape is undergoing a transformative shift towards sustainable and eco-friendly transportation solutions. With an ever-increasing emphasis on reducing carbon footprints and mitigating environmental impact, electric vehicles (EVs) have emerged as a pivotal player in this paradigm shift. In this context,themotorcycleindustrystandsattheforefrontof innovation, seeking novel solutions to address both the ecological concerns and the evolving preferences of consumers. The surge in interest in electric motorcycles stemsfromthecollectiveawarenessoftheenvironmental impact of traditional internal combustion engine vehicles. Electric motorcycles offer a clean, efficient, and sustainable alternative, significantly contributing to the reductionofgreenhousegasemissions.
Asthedemandforelectricmotorcyclescontinues to rise, the industry faces new challenges and opportunities to enhance not only the efficiency of propulsionsystemsbutalsotheoverallridingexperience. One of the key challenges faced by electric motorcycles, particularly in urban environments, is the need for advanced stability and maneuverability. Addressing this
challenge requires innovative solutions that go beyond conventionalapproaches.Theintegrationofself-balancing technology presents a promising avenue to enhance the safety and ease of use of electric motorcycles, making them more accessible to a broader audience. Further more, the incorporation of adaptive aerodynamics represents a cutting-edge feature that can optimize the motorcycle performance across diverse riding conditions. By dynamically adjusting aerodynamic elements,suchasfairingsandspoilers,themotorcyclecan achieveimprovedefficiency,range,andhandling.
In light of these considerations, the project aims to develop a Self-Balancing Electric Motorcycle with Adaptive Aerodynamics, pushing the boundaries of innovation in the electric motorcycle sector. This paper not only aligns with the broader industry trends but also addresses the specific challenges faced by electric motorcycles, showcasing the potential for a more sustainable and technologically advanced future in urban mobility
The integration of self-balancing systems in vehicles has become a focal point of research and development, driven by advancements in sensor technologies and sophisticated control algorithms. This trend is applicable to various vehicle types, with a particularemphasisonbothautomobilesandmotorcycles.
Based on queuing theory and stochastic process, the self balancing system model with self-balancing characteristicsisestablishedtobalancetheutilizationrate of autonomous vehicles under the conditions of ensuring demand and avoiding an uneven distribution of vehicle resources in the road network. The performance indicators ofthesystemare calculatedby the MVA(Mean Value Analysis) method in[1]. The analysis results show that the self-balancing process could reduce the average waitingtimeofcustomerssignificantlyinthesystem
Gyroscopic stabilization has emerged as a prominentareaofexploration.InertialMeasurementUnits (IMUs) and accelerometers are integral components, providing real-time data on the vehicle tilt and motion.
© 2024, IRJET | Impact Factor value: 8.226 | ISO 9001:2008 Certified Journal | Page548
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 05 | May 2024 www.irjet.net p-ISSN:2395-0072
This data is then utilized to dynamically adjust the center of mass, ensuring optimal balance in varying conditions. Thegyroscopeismodeledasanegligible-massshaftwitha massivediskatoneend,andissupportedonlyattheother end. The weight of the disk results in a gravitational torqueinthepositivexdirection.Theintuitiveexpectation isthattheunsupporteddiskwillfall.Thefallingdisk,after all, would create angular momentum about the positive x direction,achangeinangularmomentumrequiredbythe gravitationaltorque[2]
The PID controllers are proposed to control the robot’sposition[3].Thewholefuzzy-PIDisportedandrun on a real time operating system using an STM32F4 DiscoveryKit[3].
Balancing robot which is proposed in [4] is a robot that relies on two wheels in the process of movement. Unlike the other mobile robot which is mechanically stable in its standing position, balancing robot need a balancing control which requires an angle valuetobeusedastiltfeedback.Thebalancingcontrolwill controltherobot,soitcanmaintainitsstandingposition
Investigations into feedback control systems, notablyProportional-Integral-Derivative(PID)controllers, have yielded promising results. PID controllers are employed to continuously assess vehicle orientation and makeinstantaneousadjustmentstomaintainbalance.This hasproveneffectivenotonlyduringlow-speedmaneuvers but also when the vehicle is stationary, showcasing the adaptabilityofthesecontrolsystems.
The literature highlights the crucial role of selfbalancing systems in enhancing vehicle safety, especially inurbanenvironments.Theabilitytomaintainstabilityat low speeds is particularly relevant in congested city settings, where stop and-go traffic demands a high level ofmaneuverabilityandstability[5].
Research in this domain is inherently interdisciplinary, drawing insights from fields such as mechanical engineering, control systems, and sensor technology. Collaborative efforts have resulted in innovations that transcend traditional vehicle stability paradigms, pushing the boundaries of what is achievable in terms of rider safetyandoverallhandling.Theliteratureunderscoresthe transformative potential of self balancing systems, not onlyinimprovingthesafetyofvehiclesbutalsoinshaping the future ofurbanmobility.Asthis technologycontinues to evolve, it forms a critical foundation for the development of advanced features in projects such as the Self-Balancing Electric Motorcycle with Adaptive Aerodynamics, promising a new era in intelligent and securetransportationsol
Theself-balancingelectric motorcycleisdesigned to seamlessly integrate cutting- edge technologies to achieve optimal stability and dynamic performance. The overall architecture is a result of careful consideration of key components working in tandem to enhance rider safetyandprovideauniqueridingexperience.
1) Electric Propulsion System: The electric propulsion system serves as the primary power source for the motorcycle.Itincludesahigh-performanceelectricmotor, power electronics, and a rechargeable battery pack. The electric propulsion system is designed for efficiency, providinginstanttorqueandasmoothaccelerationprofile.
2) Self-Balancing System: The self-balancing system incorporates a combination of sensors and actuators to maintain the motorcycle balance during various riding conditions.Utilizingdatafromgyroscopes,accelerometers, and other sensors, the system continuously assesses the motorcycle tilt and adjusts the distribution of weight or applies corrective forces as needed. This enhances stability, especially during low-speed maneuvers and whenthemotorcycleisstationary.

3) Adaptive Aerodynamics System: The adaptive aerodynamics system comprises movable elements, such asadjustablespoilersandwinglets,strategicallyplacedon themotorcyclebody.Theseelementsrespondtoreal time datafromsensorsthatmeasurefactorslikevehiclespeed, wind conditions, and cornering forces. The system dynamically adjusts these aerodynamic features to optimize drag, down force, and overall aerodynamic efficiency, contributing to improved performance and handling.
4) Control Unit: The control unit acts as the brain of the system,processingdatafromvarioussensorsandsending commands to actuators. It implements sophisticated algorithms, including PID controllers for self-balancing and logic for adaptive aerodynamics. The control unit ensures seamless coordination between the electric
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 05 | May 2024 www.irjet.net p-ISSN:2395-0072
propulsion, self-balancing, and adaptive aerodynamics systems.
5) User Interface: Theuserinterfaceprovidesaseamless interaction between the rider and the motorcycle advancedfeatures.Itincludesadisplaypanelorheads-up display that presents relevant information, such as speed, battery status, and system mode. User controls, possibly integrated into handlebars or a touchscreen interface, allow the rider to engage with the self- balancing and adaptiveaerodynamicsfeatures.
6) Safety Features: The system incorporates safety features, such as emergency braking, collision detection, and stability control. These features enhance rider safety by actively monitoring the surroundings and intervening whenpotentialrisksaredetected.
The integration of these components involves a holistic approach, ensuring seamless communication and synchronization between the electric propulsion, selfbalancing, and adaptive aerodynamics systems. Robust communication protocols and real-time data processing are implemented to guarantee the system responsiveness and reliability under diverse riding conditions. The designedsystemundergoesrigoroustesting,
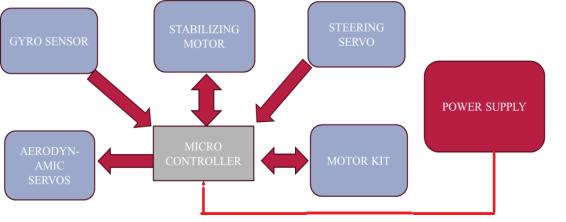
Fig.2.BlockDiagram
including simulations and real-world scenarios, to alidate its performance. This testing phase includes assessments of self- balancing effectiveness, adaptive aerodynamics responsiveness, and overall system integration. User feedback is also incorporated to refine the user interface and enhance the over all riding experience. By adopting this comprehensive system design, the self-balancing electric motorcycle with adaptive aerodynamics aims to deliver a revolutionary combination of safety, sustainability, and innovation in the electric motorcycle industry.
The self-balancing system is a critical component of the electric motorcycle, designed to enhance stability and rider safety during low-speed maneuvers and when the motorcycle is stationary. The principles guiding the self-balancing system involve real-time monitoring of the motorcycle tilt and the application of corrective forces to maintainanuprightposition.
• Inertial Measurement Units (IMUs) consisting of gyro scopesandaccelerometers,measurethemotorcycle an gular rate and acceleration. These sensors provide crucial data about the motorcycle tilt and movement, formingthefoundationfortheself-balancingalgorithm.
• The self-balancing system employs sophisticated con trol algorithms, often including ProportionalIntegral Derivative (PID) controllers. These algorithms interpret data from IMUs and calculate the necessary adjustmentstomaintainbalance.PIDcontrollersprovidea dynamic response by adjusting the motorcycle center of massandapplyingcorrectiveforcestocounteracttilting.
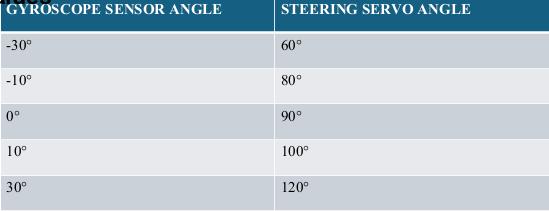
Fig.3.SteeringServotiltanglewithGyroscopesensor values
• Actuators are responsible for physically adjusting the motorcyclepositionbasedonthecommandsgeneratedby thecontrolalgorithms.Commonactuatorsincludeelectric motors or servo motors connected to movable components, such as adjustable suspension elements or a dynamically tilting platform. These actuators actively respondtothereal-timefeedbackfromthecontrolsystem tomaintainthemotorcyclebalance.

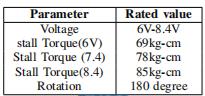
Fig.4.Servomotor
• The self-balancing system requires a reliable power supply to operate sensors, control algorithms, and actuators. This power supply is typically integrated with the electric propulsion system battery, ensuring continuousandefficientoperation.
4.2 Operation of the Self-Balancing System:
• Data Acquisition: IMUs continuously monitor the motor cycle tilt and movement, generating real-time data about itsorientation.
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 05 | May 2024 www.irjet.net p-ISSN:2395-0072
• Algorithmic Processing: Control algorithms process the datafromIMUs,comparingthemotorcycleactualtiltwith the desired upright position. The algorithms calculate the requiredadjustmentstomaintainorrestorebalance.
• ActuatorResponse:Thecontrolsystemsendscommands to the actuators based on the calculated adjustments. Actuators respond by tilting the motorcycle or adjusting itscenterofmasstocounteractthedetectedtilt.
• Continuous Feedback Loop: The process repeats in a continuous feedback loop, with the system making rapid adjustments to ensure the motorcycle remains balanced. Thereal-timenatureofthisloopallowstheself-balancing systemtoadapttochangingconditionsandriderinputs.
4.3 Integration with Electric Propulsion System:
The self balancing system is intricately integratedwiththe electricpropulsionsystem,ensuring a cohesive and responsive interaction between stability control and propulsion. This integration enhances the overall riding experience, especially in urban environmentswherelow-speedstabilityiscrucial.
Testing and Optimization: The self-balancing system undergoes rigorous testing to validate its performance under various riding conditions. Testing includes scenarios such as low-speed turns, sudden stops, and variations in terrain. Iterative optimization of control algorithms and actuator responsiveness is carried out to achieve optimal stability and rider comfort. The self balancing system is a pivotal feature that enhances the safety and maneuverability of the electric motorcycle, demonstrating a harmonious integration of sensors, control algorithms, and actuators to achieve dynamic stability.
4.4 Adaptive Aerodynamics:
The adaptive aerodynamics system is a sophisticated feature designed to dynamically adjust the motorcycle aerodynamic profile, optimizing performance and efficiency based on real time environmental conditions and riding scenarios. The system incorporates movable aerodynamic elements, such as adjustable spoilers, winglets, and flaps strategically placed on the motorcycle body. These elements are designed to modify the motorcycle aerodynamic characteristics. Sensors, including wind speed sensors, vehicle speed sensors, and gyroscopes, continuously gather data about the motorcyclespeed,windconditions,andorientation.
These sensors provide crucial input for the adaptiveaerodynamicscontrolsystem.Controlalgorithms process the data from sensors and determine the optimal configuration of aerodynamic elements based on the currentridingconditions,
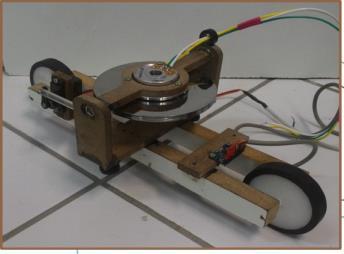
Fig.5.GyroscopicSensor
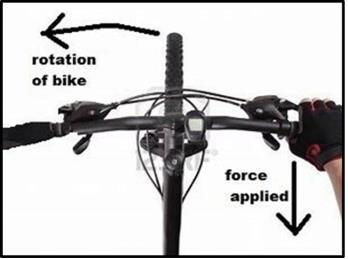
Fig.6.Steeringcontrolprocess
These algorithms may involve heuristic rules or machine learning models to adapt to various scenarios effectively. Actuators, typically electric motors or servos, are responsible for adjusting the position of the aerodynamic elementsinrealtime.
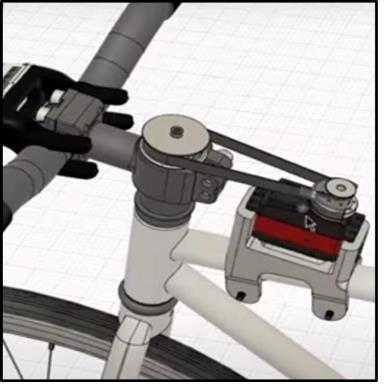
Fig.7.SteeringControl
The control system sends commands to the actuators basedonthealgorithmicanalysisofsensordata.
• Operation of the Adaptive Aerodynamics System: The system constantly monitors the motorcycle speed using vehicle speed sensors. Different aerodynamic profiles are optimalforvariousspeedranges.
• Windspeedsensorsassesstheexternalwindconditions. Higher wind speeds may necessitate adjustments to reduceaerodynamicdragandmaintainstability.
• CorneringForcesAnalysis:Duringcornering,thesystem considerslateralforcesactingonthemotorcycle.Adaptive adjustments to winglets or spoilers can enhance down forceandstability.
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 05 | May 2024 www.irjet.net p-ISSN:2395-0072
• Real-time Control Algorithm: The control algorithm processes the collected data, taking into account the motor cycle speed, wind speed, and cornering forces. It thendeterminestheoptimalpositionandconfigurationof theaerodynamicelements.
• Actuator Response: Commandsaresenttothe actuators based on the algorithmic analysis. Actuators promptly adjustthepositionofmovableelements,suchasdeploying winglets for increased downforce during high-speed straight-line acceleration or flattening them for reduced dragduringcruising.
• Continuous Adaptation: The system operates in a continuous feedback loop, adapting the aerodynamic profile based on real-time conditions. This dynamic adaptation ensures optimal performance, efficiency, and stabilityacrossdiverseridingscenarios.
Benefits and Scenarios:
Efficiency Improvement: The adaptive aerodynamics system contributes to improved overall efficiency by minimizingaerodynamicdrag,particularlyathighspeeds.
Stability Enhancement: Duringacceleration,braking,and cornering, the system adjusts to optimize down force, enhancingstabilityandgripontheroad.
Range Optimization: Bydynamicallyadaptingtoriding conditions,thesystemcontributestoenergyconservation, potentiallyextendingthemotorcyclerangeonasingle charge
User Customization: Depending on user preferences or specific riding scenarios, the adaptive aerodynamics system may offer customizable settings to cater to differentridingstylesorenvironmentalconditions.
In this paper, we presented a novel approach to enhancing motorcycle stability and performance through the integration of gyroscopic sensors and Arduino-based control systems. By leveraging gyroscopic technology, we developed a self-balancing mechanism that actively adjuststhemotorcycle’sorientationtocounteractexternal forces and maintain stability in various riding conditions. The incorporation of adaptive aerodynamics further enhances the motorcycle’s performance by dynamically optimizing airflow around the vehicle, reducing drag, and improving overall handling. This innovative combination of self-balancing and adaptive aerodynamics represents a significant advancement in motorcycle technology, with potential implications forimproving ridersafety, comfort, andefficiency.
[1] . Huanping Li, Jian Wang, Guopeng Bai, Xiaowei Hu1 and Felipe Jim’enez ”Research on Self-Balancing System of Autonomous Vehicles Based on Queuing Theory”Publishedonline2021Jul5.
[2]. Richard H. Price ”Gyroscopes simply explained with Coriolis pseudotorques” American Journal of Physics, Volume88,issue12,December2020
[3].TheAnhMai,ThaiSonDang,D.N.Anisimov,Eka terina Fedorova ”Fuzzy-PID Controller for Two Wheels Balancing Robot Based on STM32 Microcontroller”2019 International Conference on Engineering Technologies and Computer Science (EnT)
[4]. Derry Pratama; Eko Henfri Binugroho; Fernando Ardilla, ”Movement control of two wheels balancing robot using cascaded PID controller”International Elec tronicsSymposium(IES)Publisher:IEEE
[5]. Ralf Llanasas,” Enhancing Road Safety: How Technology is Revolutionizing Driving”Datafloq: Data andTechnologyinsights,November15,2023
[6]. Wenhao Deng, Skyler Moore, Jonathan Bush, Miles Mabey, and Wenlong Zhang ”Towards Automated Bicy cles: Achieving Self-Balance using Steering Control”
[7] Shantanu Chavanl, Ms. Tanvi Kargupp1kar, and Ms. Mrunal Vaidya”Design and Fabrication of SelfBalancingTwo-WheelerbyGyroscopicStabilization,”
[8] Pirah Peerzada, Wasihyder Larika, and Aiman Abbas Maharb A ”DC Motor Speed Control through Arduino andL298NMotorDriverusingPIDController”
BIOGRAPHIES


Abisudh KS
Final year B.Tech student in the Electrical and Electronics engineering Department of AWH Engineering College, Calicut, Kerala,India
Abhinand V
Final year B.Tech student in the Electrical and Electronics engineering Department of AWH Engineering College, Calicut, Kerala,India
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 05 | May 2024 www.irjet.net p-ISSN:2395-0072



Abhin Chandra C
Final year B.Tech student in the Electrical and Electronics engineering Department of AWH Engineering College, Calicut, Kerala,India
Mohammed Safwan PM
Final year B.Tech student in the Electrical and Electronics engineering Department of AWH Engineering College, Calicut, Kerala,India.
Jasmine P
Assistant professor in the Electrical and Electronics engineering Department of AWH Engineering College, Calicut, Kerala,India