
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072
Somil Majila1 , Mayank Kumar2 , Mayank Shahi3 , Harshit Agarwal4
1,2,3,4Student, Department of Electronics and Communication Engineering, Govind Ballabh Pant Institute of Engineering and Technology, Ghurdauri(Pauri) , Uttarakhand, India
Abstract - In the present scenario, IoT playsa pivotalrolein automation and remote control, with industries, especiallythe automotive sector, embracing IoT-based productsextensively. The advent of Internet of Things (IoT) technology has spurred advancements across various domains, notably automotive systems. Our project focuses on integratingIoT principles with motor control mechanisms, harnessing the capabilities of the ESP8266 board a versatile microcontrollerunit. Utilizingthe ESP8266 board's functionalities, we have developed a sophisticated system enabling remote control of a car, showcasing the transformative potential of IoT within the automotive industry. For development purposes, we opted for the NodeMCU as our development board due to its costeffectiveness and versatility in IoT-basedprojects. Tofacilitate motor control, we incorporated the L298N motor driver module. Furthermore, we utilized the Blynk server as our IoT platform, ensuring seamless remote control and monitoring capabilities for the car. We have also incorporated the ultrasonic sensor (HC-SR04) for the frontalcollision detection
Key Words: Iot, ESP8266, NodeMcu, Blynk, L298N, etc.
Astechnologycontinuestoevolve,theautomotivesectoris harnessinginnovativesolutionstoenhancesafetymeasures and streamline operations, with a primary focus on minimizingaccidentsandoptimizingthedrivingexperience. TheadventoftheInternetofThings(IoT)hasemergedasa transformative element, revolutionizing automation and remotecontrolfunctionalitiesacrossvariousindustriesand sectors.RecognizingthepotentialofIoTindrivingefficiency and safety improvements, our project embarks on developing a cutting-edge prototype tailored to empower userswithremotevehiclemanagementcapabilitiesfromany global location. This groundbreaking initiative aspires to introduceamultifacetedanduser-intuitivesystem,enabling individualstocontrol,andmanagetheirvehiclesseamlessly, thereby elevating convenience, safety, and operational efficiency. By seamlessly integrating state-of-the-art IoT technologies and solutions, we envision reshaping the automotive landscape by emphasizing enhanced accessibility, real-time monitoring, and robust security protocols. The core architecture encompasses intricate connections, linking sensors and motor drivers to the NodeMCU microcontroller, facilitating seamless internet connectivity through a dedicated WiFi network infrastructure. Through the integration of the Blynk IoT platform, users gain unparalleled control over vehicle
functionalities, accessing a comprehensive interface via mobile or laptop devices, irrespective of geographical constraints. Additionally, the deployment of advanced ultrasonicsensortechnologyenhancessafetymeasuresby detectingpotentialobstaclesinthevehicle'spath,triggering adaptive motor adjustments based on predefined parameters and user preferences. This holistic approach underscores our commitment to innovation, safety, and user-centricdesignprinciples,pavingthewayforanewera ofconnectedandintelligentautomotivesolutions.
2.1 Problem Identification
Intherapidlyevolvingautomotiveenvironment,thereexists a gap in offering effective solutions for remote vehicle managementandmonitoring,leadingtopotentiallimitations in accessibility and safety for users. Despite technological progress,integratingIoT-basedfunctionalitiesforreal-time vehicle control remains a complex endeavor, creating barriersinmeetinguserexpectationsandenhancingsafety protocols.
2.2 Block Diagram
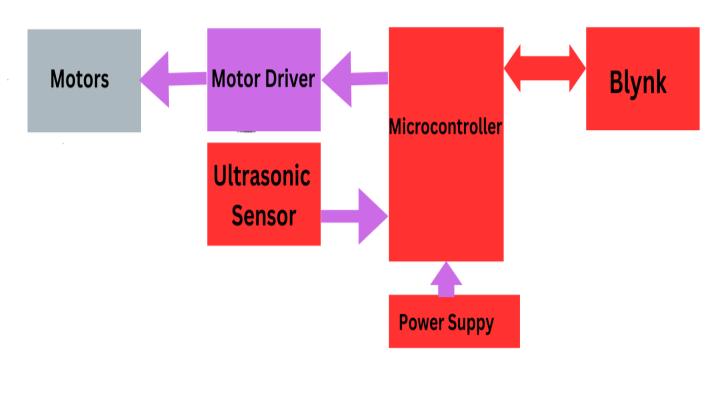
Fig -1:BlockDiagram
2.3 Problem Solution
Inthisproject,weaddressthechallengebyimplementinga comprehensivesolutionthatintegratesvariouscomponents tofacilitateremotevehiclecontrolandmonitoring.Thekey components employed include the NodeMCU microcontroller,L298Nmotordriverformotorcontrol,an ultrasonic sensor for object detection, and the Blynk platformforremotevehiclemanagement.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072
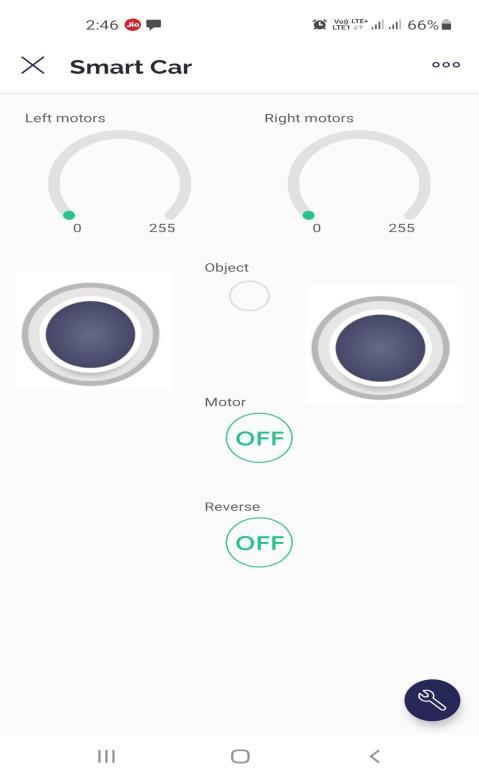
Toinitiatethesystem,usersarerequiredtoestablishaWiFi connection, enabling seamless communication and functionalityoftheNodeMCUmicrocontroller.Subsequently, userscanlogintotheBlynkplatform,wheretheygainaccess to a user-friendly interface for controlling the vehicle remotely.
Upon receiving commands from the Blynk platform, the NodeMCU microcontroller processes the instructions and communicateswiththeL298Nmotordrivertoregulatethe motoroperationsaccordingly.Thisensuresprecisecontrol over the vehicle's movement based on user-defined parametersandcommands.
Additionally,theintegrationofanultrasonicsensorfurther enhancesthesystem'scapabilitiesbydetectingobstaclesor objectsinthevehicle'spath.Thesensorcommunicateswith theNodeMCUmicrocontroller,providingreal-timefeedback and enabling adaptive responses to ensure safety and efficiencyduringoperation.
In summary, the cohesive integration of the NodeMCU microcontroller,L298Nmotordriver,ultrasonicsensor,and Blynkplatformfacilitatesastreamlinedprocessforremote vehicle control and monitoring. Users can leverage this innovative system to manage their vehicles effectively, emphasizingsafety,accessibility,andoperationalefficiency.
6. COMPONENTS LIST
(1) NODEMCU ESP8266 (Micro controller)-TheNodeMCU ESP8266 stands out as a versatile microcontroller board renowned for its adaptability and robust performance in variousIoTapplications.Thiscompactyetfeature-richboard facilitates seamless connectivity, enabling efficient data processingandcommunicationessentialforcontemporary automationandcontrolsystems.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072

Fig-5: NodeMCUESP8266
(2)ULTRASONIC SENSOR (HC-SR04)-The HC-SR04 ultrasonic sensor emerges as a critical component in numerousapplications,leveragingsoundwavestomeasure distances with remarkable accuracy. Its precise detection capabilitiesmakeitanindispensabletoolforimplementing obstacle detection, proximity sensing, and distance measurement functionalities across diverse sectors, including robotics, automotive safety systems, and smart devices.

Fig-6:UltrasonicSensor(HC-SR04)
(3)MOTOR DRIVER (L298N)-The L298N motor driver module plays a pivotal role in enhancing motor control capabilities,offeringunparalleledflexibilityandrobustness in regulating motor speed, direction, and functionality. Its integrated design and compatibility with a wide array of motorsmakeitapreferredchoiceforprojectsdemanding precisecontrol,dynamicresponsiveness,andefficientpower management, thereby ensuring optimal performance and reliability.

7.
Through the meticulous integration of the NodeMCU microcontroller,L298Nmotordriver,ultrasonicsensor,and Blynk platform, our project has successfully developed a robustsystemthatenablesseamlessremotevehiclecontrol andmonitoring.Keyoutcomesincludetheestablishmentof reliableWiFiconnectivity,facilitatingprecisemotorcontrol and enhanced safety measures through the ultrasonic
sensor's obstacle detection capabilities. The user-centric interfaceprovidedbytheBlynkplatformempowersusersto managetheirvehiclesremotelyviamobileorlaptopdevices, emphasizing operational efficiency, accessibility, and responsiveness. Overall, the cohesive integration of these components has yielded tangible results, enhancing functionalities, safety protocols, and user experience, thereby highlighting the transformative potential of IoT technologiesinredefiningautomotivesystems.
In conclusion, our project represents a significant step forwardinaddressingthechallengesassociatedwithremote vehiclecontrolandmonitoringwithintheautomotivesector. By leveraging the capabilities of the NodeMCU microcontroller,L298Nmotordriver,ultrasonicsensor,and theBlynkplatform,wehavedevelopedacomprehensiveand innovativesolutionthatemphasizessafety,accessibility,and operational efficiency. The seamless integration of these components enables users to establish a WiFi connection, access the Blynk platform, and control their vehicles remotelywithprecisionandease.Furthermore,theinclusion of the ultrasonic sensor enhances safety measures by detecting obstacles and facilitating adaptive responses, thereby mitigating potential risks during operation. This project underscores the transformative potential of IoT technologiesinreshapingtheautomotivelandscape,paving the way for enhanced functionalities, user-centric design, andamoreconnecteddrivingexperience.Movingforward, the insights and advancements achieved through this initiative hold promise for further innovation and collaboration,fosteringafuturewhereintelligentvehicular systems and IoT integration redefine mobility, safety, and convenienceforusersglobally.
[1] Madan,P.,Dhama,L.,Dahiya,R.,&Doda,R.(2019). A Review Paper on Arduino Research Papers. International Journal for Research in Applied Science&EngineeringTechnology(IJRASET),7(3). http://www.ijraset.com
[2] Louis,L.(2019).WorkingPrincipleofArduinoand Using It as a Tool for Study and Research. International Journal for Research in Applied Science&EngineeringTechnology(IJRASET),7(3). http://www.ijraset.com
[3] Oner, V. O. (2023). Developing IoT Projects with ESP32. International Journal of Control, Automation, Communication and Systems (IJCACS),1(2). https://doi.org/10.5121/ijcacs.2016.1203