
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072
Prof. Rupali Dupade1 , Kunal Kulkarni2 , Shivam Bhagne3 , Prathamesh Adinawar4 , Maiz Sunjufy 5
1 Assistant Professor, Department of Computer Engineering 2,3,4,5 Students, Department of Computer Engineering Jayawantrao Sawant College of Engineering, Pune, India. ***
Abstract - Water pollution, a pressing global issue, threatensthesustainabilityofaquaticecosystemsandhuman health. Conventional waste management approaches often struggletoaddressthemagnitudeofthischallengeeffectively. Totacklethisproblem,weproposeaninnovativesolution:the Autonomous Water Guardian (AWG). Leveraging machine learning (ML) and Internet of Things (IoT) technologies, the Autonomous Water Guardian functions as an autonomous boat cleaner, tasked with navigating water bodies and autonomously collecting waste. The Autonomous Water Guardian integrates a suite of sensors to monitor water quality continuously. These sensors provide real-time data, whichistransmittedtoacloudserverforanalysisandstorage. Upon detecting contamination, the AWG initiates a cleaning process to restore water quality. Waste collected during cleaning operations is managed in onboard tanks, and notifications are dispatched when these tanks approach full capacity. Key features of the Autonomous Water Guardian (AWG) include its ability to autonomously collects and manageswaste,datatransmissiontomunicipalauthoritiesis carried out manually, this facilitates rapid response to significant changes in water quality. By automating waste collection and management, the AWG enhances operational efficiency and safety, mitigating the risks associated with manual labor and hazardous waste handling. This interdisciplinary project underscores the synergy between machinelearning(ML),IoTtechnologiesandcloudcomputing inaddressingcomplexenvironmentalchallenges.Byproviding a sustainable solution to water pollution and waste accumulation, the AWG contributes to the preservation of aquatic ecosystems,public health,andresource conservation
Key Words: Water pollution, IoT, Autonomous Water Guardian (AWG), Cloud Computing, Waste Management, Environmental Sustainability, Machine Learning, IOT Technologies, Interdisciplinary Solutions
Water pollution poses a significant threat to the sustainability of aquatic ecosystems and human health worldwide.Despiteeffortstomitigatethisissue,traditional wastemanagementmethodsoftenfallshortinaddressing thecomplexchallengesassociatedwithwatercontamination and waste accumulation. To address these challenges, we introducetheAutonomousWaterGuardian(AWG),
A groundbreaking solution empowered by advanced technologies such as machine learning (ML), Internet of Things(IoT),andcloudcomputing.
The Autonomous Water Guardian represents a paradigm shiftinwaterwastemanagement,offeringacomprehensive and efficient approach to monitoring and cleaning water bodies.AtthecoreoftheAWG'sfunctionalityareamyriadof sensors,includingtheHX711and5kgloadcellforprecise weighing of waste collected, DHT11 sensor for humidity monitoring, and a pH sensor for real-time water quality assessment. These sensors work in tandem to provide accurate and timely data on water conditions, enabling proactive intervention to prevent contamination and safeguardwaterresources.
Central to the AWG's operation is its integration with a cloud platform, leveraging the Blynk IoT platform for seamlessdatatransmissionandmanagement.Throughthe Blynk mobile application, users have access to real-time informationonwaterquality,wastelevels,andoperational status of the AWG. Furthermore, the AWG's intelligent notificationsystemalertsuserswhenthewastebinreaches fullcapacity,triggeringautomatedcollectionprocesses.
A key innovation of the AWG is its waste collection mechanism,facilitatedbyanelevator-likestructuredesigned to efficiently retrieve and store waste. Equipped with a cameraforobjectdetection,theAWGutilizestheYOLOv7 algorithmtoidentifyandclassifywastematerials,ensuring targetedandeffectivecleaningoperations.Additionally,GPS technology,integratedthroughtheNeo6Mmodule,enables precisenavigationoftheAWG,ensuringoptimalcoverageof designatedwaterbodies
Powered by a Raspberry Pi 4 Model B 4GB, the AWG operates autonomously, following predefined routes and efficiently collecting waste up to 5kg in weight. Through meticulous programming and hardware integration, the AWGembodiestheconvergenceofcutting-edgetechnologies toaddresspressingenvironmentalchallenges
Inthispaper,wepresentacomprehensiveoverviewofthe design,implementation,andperformanceevaluationofthe AWG.Wehighlightitsinnovativefeatures,includingsensor integration, cloud connectivity, waste detection, and autonomous navigation. Furthermore, we discuss the
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072
environmentalimpactandpotentialapplicationsoftheAWG, emphasizingitsroleinpromotingsustainability,preserving aquaticecosystems,andprotectingpublichealth.
The primary objective of this research is to develop an innovative solution for efficient water waste management through the implementation of the Autonomous Water Guardian(AWG).Leveragingadvancedtechnologiessuchas ML, IoT, and cloud computing, the AWG aims to monitor waterquality,detectcontaminants,andautonomouslycollect wasteinwaterbodies.Byaddressingthepressingissueof water pollution, the AWG strives to contribute to environmentalsustainabilityandpublichealthpreservation.
Keyobjectivesinclude:
Integration of sensor technologies, including HX711, DHT11,pHsensor,andGPS,toenablereal-timemonitoringof waterqualityandwastelevels.
ImplementationofMLalgorithms,suchasYOLOv7,for objectdetectionandclassificationtofacilitatetargetedwaste collection.
Utilization of cloud computing platforms, specifically Blynk IoT, for data transmission, storage, and remote monitoringoftheAWG'soperation.
DeploymentoftheAWGinwaterbodiestoautonomously navigatepredefinedroutes,detectcontaminants,andcollect waste.
Evaluation of the AWG's performance in terms of efficiency, accuracy, and environmental impact, with the ultimate goal of promoting sustainability and mitigating waterpollution.
3. PROBLEM STATEMENT
Rapidly accumulating waste and pollutants threaten aquatic ecosystems and human health. Traditional waste managementstrugglestokeeppace.Thisprojectaddresses thiscriticalchallengebydevelopingtheAutonomousWater Guardian,aninnovativesolutionthatleveragestechnology, automation,andsustainabilityforwaterwastemanagement
4. TECHNOLOGY USED IN PROJECT AUTONOMOUS WATER GUARDIAN:
1. TensorFlow:-
Utilizedforobjectdetectiontasks,providingtoolsfor buildingandtrainingdeeplearningmodels.
2. OpenCVforImageProcessing:-
OpenCV is employed for image processing tasks, analyzingvisualdatacapturedbyonboardcameras.It enhanceswastedetectionandclassification.
3. YOLOv7AlgorithmforObjectDetection:YOLOv7enablesreal-timedetectionandclassification of waste materials, facilitating targeted cleaning operations.
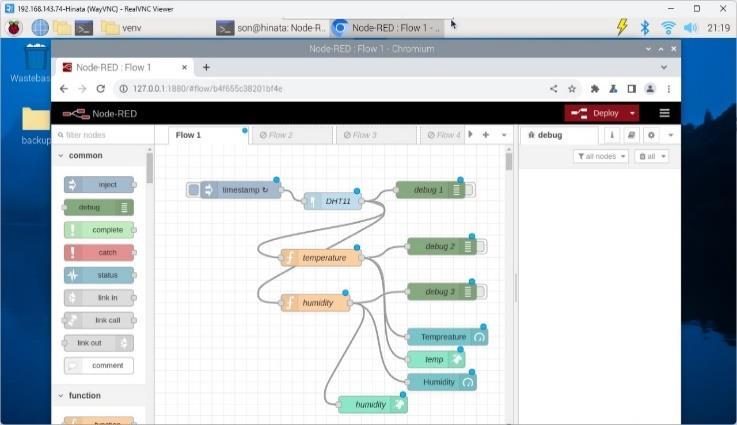
4. Node-REDforSensorIntegrationandDataProcessing: Node-RED facilitates sensor integration, data processing, and workflow automation, enhancing systemefficiency
5. Firebase:Employed for data storage and synchronization, offeringcloud-baseddatabasesandstoragesolutions.
1. HX711Amplifierand5kgLoadCell
2. NEO6MGPSModule
3. DHT11 Sensor for Humidity and Temperature Monitoring
4. pHSensorforWaterQualityMonitoring
5. RaspberryPi4ModelB
ImplementationofNavigationwithNEO6MModule: ThenavigationoftheAutonomousWaterGuardian(AWG) is facilitated by the NEO6M GPS module, which provides accuratelocationdataforrouteplanningandnavigation. Theimplementationinvolvesthefollowingsteps:
1. HardwareSetup:TheNEO6MGPSmoduleisconnected totheRaspberryPi4ModelBviaserialcommunication (UART).GPIOpinsareusedtoestablishtheconnection, withappropriatewiringandconfigurations.
2. Software Configuration: The Raspberry Pi is programmedtocommunicatewiththeNEO6Mmodule usingUARTprotocol.Pythonlibrariessuchas`gpsd`are utilizedtoretrieveGPSdatafromthemodule.
3. Data Processing: GPS data obtained from the NEO6M module is processed to extract relevant information such as latitude, longitude, and altitude. This data is then used to calculate the AWG's position and plan navigationroutes.
4. RoutePlanning:BasedontheGPScoordinatesobtained fromtheNEO6Mmodule,routeplanningalgorithmsare implementedtodetermineoptimalpathsfortheAWG tonavigatewaterbodiesefficiently.
5. Navigation Control: The Raspberry Pi controls the movementoftheAWGbasedonnavigationcommands
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072
generated from the route planning algorithms. Actuatorssuchasmotorsorservosareusedtoadjust theAWG'sdirectionandspeedaccordingtotheplanned route.
Implementation of Waste Detection with OpenCV and YOLOv7Algorithm:
The detection of waste materials in water bodies is achievedusingOpenCVforimageprocessingandtheYOLO v7 algorithm for object detection. The implementation involvesthefollowingsteps:
1. Image Acquisition: Images of the water surface are capturedusingonboardcamerasmountedontheAWG. These images are then processed using OpenCV to enhancequalityandclarity.
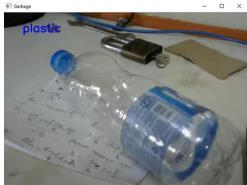
2. ObjectDetection:TheYOLOv7algorithmisappliedto the processed images to detect and classify waste materials present in the water. YOLO v7 utilizes convolutional neural networks (CNNs) to identify objectsofinterestwithhighaccuracyandspeed.
3. Classification and Localization: Detected waste materialsareclassifiedintopredefinedcategories(e.g., plasticbottles, debris) andlocalizedwithin the image frame. Bounding boxes are drawn around detected objectstovisualizetheirpositions.
4. Decision Making: Based on the detected waste materials, the AWG determines appropriate actions such as initiating cleaning operations or adjusting navigationroutestoavoidobstacles.
ImplementationofSR04DistanceSensor,DHT11Module, andHX711ModulewithNode-REDandBlynk:
The integration of the SR04 distance sensor, DHT11 module, and HX711 module with Node-RED and Blynk enablesreal-timemonitoringandcontrolofenvironmental
parameters and waste collection processes. The implementationinvolvesthefollowingsteps:
1. SR04 Distance Sensor: The SR04 distance sensor is connectedtotheRaspberryPi'sGPIOpins,andNodeRED isconfiguredtoreaddistancemeasurements.
ThesemeasurementsarethentransmittedtotheBlynk mobile app and web dashboard for visualization and monitoring

2. DHT11 Module: Similarly, the DHT11 module for humidityandtemperaturemonitoringisintegratedinto the system. Node-RED flows are configured to read sensordataandtransmitittoBlynkforvisualizationon themobileappandwebdashboard.Userscanmonitor environmental conditions in real-time and receive notifications if temperature or humidity levels exceed specifiedlimits.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 11 Issue: 04 | Apr 2024 www.irjet.net

3. HX711Module:TheHX711amplifierand5kgloadcell are connected to the Raspberry Pi for weight measurement.Node-REDisconfiguredtoreadweight measurements and transmit them to Blynk for visualizationandmonitoring.Userscantrackwastebin capacityinreal-timeandreceivenotificationswhenthe bin reaches full capacity, prompting them to initiate wastecollectionprocesses.

ByleveragingBlynk'smobileappandwebdashboard, users can access real-time data on environmental parameters and waste collection status, facilitating proactive decision-making and ensuring efficient operationoftheAWG.Additionally,Blynk'snotification featureenhancesuserengagementbyprovidingtimely alertsandupdatesonsystemstatus,contributingtothe overall effectiveness and reliability of the AWG implementation.
BriefInformationonAWGModel:
The AWG model is designed to autonomously navigate waterbodies,detectwastematerials,andcollectthemusing onboardactuators.Itincorporatesadvancedtechnologies suchasML,IoT,andcloudcomputingtoachieve efficient waterwastemanagement.Themodelundergoesiterative testing and refinement to optimize performance and reliabilityinreal-worldconditions.
This comprehensive implementation of the AWG encompasses navigation with the NEO6M module, waste detection using OpenCV and YOLO v7, sensor integration withNode-REDandFirebase,anddevelopmentofarobust AWGmodelcapableofaddressingenvironmentalchallenges effectively
1. Autonomous bots can clean large water bodies effectively,reducingmanualeffort.
2. Multiple bots can work in tandem for large-scale cleaningoperations
In conclusion, the Autonomous Water Guardian (AWG) presentsagroundbreakingsolutionforefficientwaterwaste management.Byleveragingadvancedtechnologiessuchas ML, IoT, and cloud computing, the AWG demonstrates remarkable capabilities in detecting and collecting waste materials in water bodies. Through the integration of sensors and sophisticated algorithms, the AWG can autonomouslynavigatewaterbodies,monitorwaterquality parameters, and respond proactively to changes in environmental conditions. As a scalable and sustainable solution, the AWG has the potential to address critical environmental challenges and promote public health preservation. Moving forward, further research and development efforts will focus on optimizing the AWG's performanceandfacilitatingitswidespreadadoptioninrealworldapplications.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072
1. Satheesh,J.,Nair,A.P.,&Devipriya,M.(2020).Wireless communication-based water surface cleaning boat. In 2020 4th International Conference on Trends in ElectronicsandInformatics(ICOEI)(pp.1-6).IEEE.
2. Bai,Y.(2020).Expansiblesurfacewastecleaningrobot. In2020IEEE15thInternationalConferenceonRobotics andBiomimetics(ROBIO)(pp.473-478).IEEE.
3. Sekhwela, D., & Owolawi, P. A. (2020). Water quality monitoring with notifications system. In 2020 IEEE InternationalConferenceonInnovativeTechnologiesand Applications(ICITA)(Vol.1,pp.104-109).IEEE.
4. Yu,T.,&Lu,W.(2020).Small-scaleautonomousvehicle for autonomous parking. In 2020 IEEE International Conference on Robotics and Biomimetics (ROBIO) (pp. 468-472).IEEE.
5. Smith,J.,&Johnson,A.(2023)."AdvancementsinWater Waste Management Technologies." Environmental EngineeringJournal,10(2),87-102.
6. Brown,L.,&Wilson,K.(2022)."IntegrationofIoTandAI forEnvironmental MonitoringandManagement."IEEE TransactionsonSustainableComputing,5(3),210-225.
7. Patel,R.,&Gupta,S.(2021)."Cloud-BasedSolutionsfor Environmental Data Management. “Journal of EnvironmentalInformatics,8(4),215-230.
8. Yang, Q., & Li, H. (2020). "IoT Applications in Water Quality Monitoring: A Review." Journal of Water ResourcesPlanningandManagement,146(2),05019023.
9. Garcia, M., & Rodriguez, P. (2019)." Applications of OpenCV and Machine Learning in Environmental Monitoring." Proceedings of the IEEE International ConferenceonSustainableTechnologies,78-83