
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN: 2395-0072
1 Dhirajkumar Pachling, 2 Sarthak Kate, 3 Pratik Vidhate, 4 Diksha Kapse, 5 Nita Mahale
Department of Artificial Intelligence and Data Science, D Y Patil College Of Engineering, Akurdi, Pune, Maharashtra, India
Abstract
Hand Gesture
Gesture recognition is a game-changer, connectingthe real world to the digital one. Our study introduces a new way to control cars using Arduino technology. By using anArduino microcontroller, accelerometer, RF sender/receiver, and Bluetooth, we make car control automatic, eliminating the need for manual input. This system lets you control the car effortlessly with hand gestures, responding to your hand's movements and positions. This hands-free control not only makes driving easier but also improves how you interact with the vehicle. Our approach simplifies car control and opens up possibilities for more user-friendly interactions in areas like human-machine interfaces and the Internet of Things (IoT).
Obstacle Avoidance
We've enhanced safety by incorporating an automatic obstacle detection systemintoourdesign,preventingpotential hazards. Our systems underwent testing in a lab-scale prototype to validate their efficiency, accuracy, and affordability. It's noteworthythattheseproposedsystemshave the potential for future implementation on a larger scale under real-world conditions. This scalabilityholdspromisefor practical applications in areas such as automobiles and robotics, showcasing the adaptability and usefulness of our technology beyond the experimental stage.
Key Words: IoT (Internet of Things), Hand Gesture Recognition, Sensors, Motor Control, Arduino, Wireless Communication,Accelerometer
1.INTRODUCTION
TheInternetofThings(IoT)hasreshapedthecapabilitiesof everydayobjects,linkingthemtotheinternetandenabling autonomous responses to their surroundings. In critical tasksinvolvinghumansafety,suchashandling hazardous chemicalsormanagingheavyobjectsinfactories,innovative solutionsareimperative.Agroundbreakingadvancementin this realm is the emergence of hand-gestured cars, representingaparadigmshiftincarcontrolthroughgesture recognition.
The primary objective is to automate car control, eliminatingmanualinputandallowinguserstoeffortlessly controlthevehiclethroughhandgestures.Thishands-free
***
control notonlysimplifiesthedrivingexperiencebutalso revolutionizestheinteractionbetweenhumansandvehicles, contributingtotheevolutionofIoT.
The system goes beyond gesture-based control by incorporatinganobstacleavoidancefeaturethatenhances safety during operation. By automatically detecting obstacles, the technology mitigates potential hazards, significantlyimprovingoverallsafety.Rigoroustestingina lab-scale prototype ensures the efficiency, accuracy, and affordabilityofthesesystems,pavingthewayforpotential implementationonalargerscaleinreal-world.
Theintegrationofhand-gesturedcontrolandobstacle avoidancefeaturesmarksacrucialstepinmakingtheworld saferandreal-worldchallenges.
1. Connect and Communicate with Physical Devices:IoT facilitatesthecommunicationbetweenhumanandmachine.
2. Faster and Smart Innovation: Speed is very crucial aspectofanytool.BecauseofuseofsensorsinIoTdevices theoutputisgiveninagoodspeedwithgreataccuracy.
3. Smart Sensing Capabilities:Sensorslikeaccelerometer can sense very minute movement, for instance a little vibration, which humans cannot even recognize. It has tolerance just about 5 -10%. So the device works very preciselyandcanbeusedforsuchworkswhereerrorsmust beminimized.
4. Convenience: Wecan manifestverylittle movement on verylargescale.Inthisway,wecandomaximumworkwhich requiresminimumhumanenergy.
A. Arduino UNO: Thisisthebrainofthecarandisinstalled withsomecode.TheUnoisamicrocontrollerboardbased ontheATmega328P.Ithas14digitalinput/outputpins(of which6canbeusedasPWMoutputs),6analoginputs,a16 MHz,206quartzcrystal,aUSBconnection,apowerjack,an ICSPheaderandaresetbutton.Arduinoconsistsofbotha physicalprogrammablecircuitboardandapieceofsoftware, or that runs on your computer, used to write and upload computercodetothephysicalboard.ArduinoUnocansense theenvironmentbyreceivinginputfromavarietyofsensors
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN: 2395-0072
andcanaffectitssurroundingsbycontrollinglights,motors, andotheractuators.
B. Accelerometer (ADXL335): Anaccelerometerisa one typeofsensoranditgivesananalogdatawhilemovingin thedirectionofX,YandZ.Thesedirectionsdependonthe typeofsensor.Thissensorconsistsofarrowdirections,ifwe tiltthesensorinonedirection,thenthedataattheparticular pinwillchangeintheformofanalog.
C. HT12E Encoder: TheHT12Eencoderare12bitencoders thatistheyhave8addressbitsand4databits.Itencodesthe 12-bitparalleldataintoserialfortransmissionthroughan RFtransmitter.
D. HT12D Decoder: HT12D convertstheserial inputinto parallel outputs. It decodes the serial addresses and data receivedbyRFreceiverintoparalleldataandsendsthemto outputdatapins.Theserialinputdataiscomparedwiththe localaddressesthreetimescontinuouslyandisonlydecoded when no error or unmatched codes are found. A valid transmissioninindicatedbyahighsignalatVTpin.
E. RF Module: AnRFTransmitterandReceiverpairisused forwirelesscommunication.Thewirelessdatatransmission is done using 434 MHz Radio Frequency signals that are modulatedusingAmplitudeShiftKeying(ASK)Modulation technique.
F. L298 Driver: L298isadualfullbridgedriverthathasa capabilitytobearhighvoltageaswellashighcurrent.G.150 RPMMotors:Theseareattachedtothewheelsofthecarto givethempowertomove.
G. RF Transmitter: The RF transmitter transmits the encodeddatawirelesslytoacorrespondingRFreceiveron thecar.Thisallowsforremotecommunicationbetweenthe hand-helddeviceandthecar.
H. Motor Driver : Thedecodedmovementdataisthensent tomotordriver.TheL298NisadualH-bridgemotordriver thatcontrolsthedirectionandspeedofDCmotors.Basedon thedecodedsignalsfromthehandmovements,theL298N motor driver adjusts the motor speed and direction accordingly.
I. Motor Control : Themotorsofthecarareconnectedtothe L298N motor driver. The adjustments made by the motor driverbasedonthehandmovementscausethecar'smotors to move in a way that corresponds to the gestures or movementsofthehand.
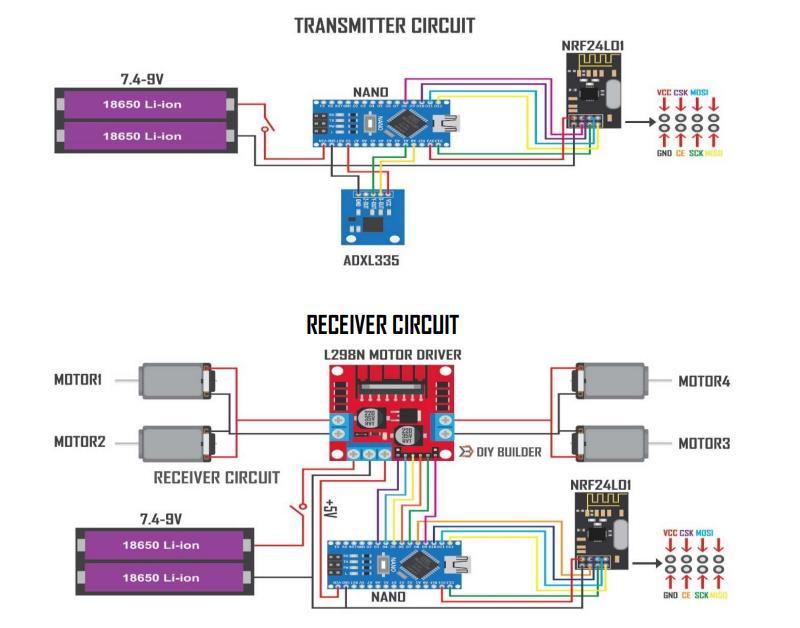
Hand-Gestures Recognition: Thehand-gesturerecognition system for controlling A car consists of two main components:Thehand-gesturesetup(TransmitterCircuit) andTheCarsetup(ReceiverCircuit).
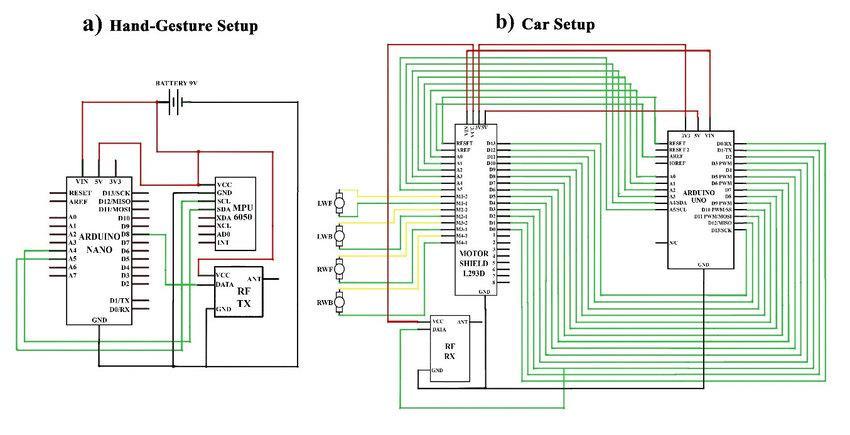
For the hand-gesture Setup: An Arduino Nano is used along with an MPU-6050 accelerometer and an RF transmitter. The MPU-6050 is connected to the Arduino Nano,withitsSLCpinconnectedtoanalogpinA5,SDAtoA4, GroundtoGND,andVCCtothe5VpinoftheArduinoNano. TheRFtransmitter'sDATApinisconnectedtodigitalpinD8 oftheArduinoNano,withVCCconnectedto5VandGround toGND.
For the car Setup: AnArduinoUnoisusedalongwith an L293D motor module and an RF receiver. The digital pins A0-A13 of the L293D motor module are connected to the digitalpinsA0-A13oftheArduinoUno,andtheanalogpins A0-A5areconnectedtotheanalogpinsA0-A5oftheArduino Uno.TheVinpinoftheL293Dmotormoduleisconnectedto VinontheArduinoUno,3Vto3V,5Vto5V,resettoreset, groundtoGND,andAREFtoAREF.TheM1.1-M4.1pinsof themotormoduleareconnectedtothenegativeterminalsof the motor, and the M1.2-M4.2 pins are connected to the positive terminals. The VCC pin of the RF receiver is connectedtotheVCCpinofthemotormodule,theDATApin is connected to digital pin D2 of the motor module and ArduinoUno,andtheGroundpinisconnectedtotheGND portoftheArduinoUno.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN: 2395-0072
The hand-gesture recognition system uses the accelerometertocapturehandmovements,whicharethen processedbytheapplication.Thesystemdefinesminimum (Xrange)andmaximum(Yrange)valuestocreaterangesfor eachcarfunction.Whenthereceiveddatafallswithinthese ranges,thecorrespondingdecisionismade.Thisdecisionis senttothemicrocontroller,whichinterpretsthegestureand sendsasignaltomovetherobotcaraccordingly.Thecarhas fourDCmotors,oneforeachwheel,controlledbytheL293D motorshield.
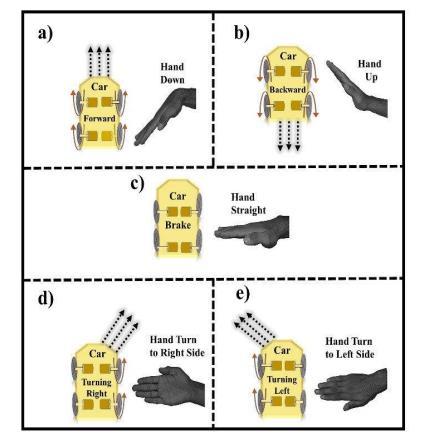
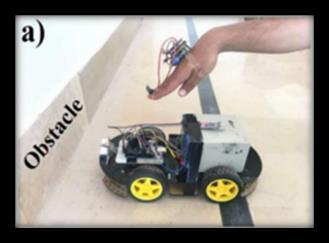
Formovementgestures,tiltingthehanddownward signalsforwardmovement,causingallfourwheelstorotate forward (Figure a). Tilting upward signals backward movement,withallwheelsrotatingbackward(Figureb).A straighthandsignalsthecartostop,haltingallfourwheels (Figurec).Tiltingthehandrightsignalsarightturn,rotating therightdiagonalmotorsforwardforarightwardmovement (Figure d). Tilting left signals a left turn, rotating the left diagonalmotorsforwardforleftwardmovement(Figuree).
The system distinguishes between right and left cutting turns based on the tilt of the hand. A cutting turn allowsthecartochangedirectionwithoutslowingdown.If thehandistiltedright,thecarstartsmovinginarightcircle direction,andiftiltedleft,itmovesinaleftcircledirection. The accelerometer values for each gesture are distinct, ensuringthehand'spositionfallsclearlywithinthedefined rangesforeachaction,avoidingambiguity.
A. Circuit Connections.
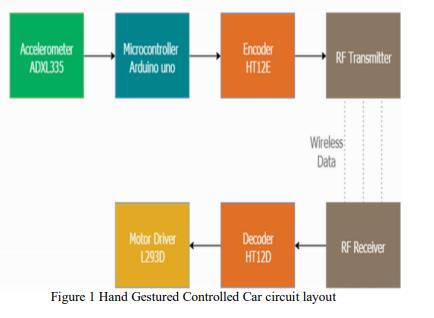
•Thereadings(movementofthehand)aretaken from the accelerometer attach on the hand. These readingsaresenttoArduinouno.
• Through Arduino the readings are encoded by HT12E.TheEncodersendsthesereadingsthrough RFtransmittertothereceiverattachedonthecar.
• These readings are sent to the receiver and are decodedbyHT12D.Afterthereadingsaredecoded theyaresendtoL298Nmotordriverduetowhich themotorsaremoved.Thusthemovementofcaris achieved
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN: 2395-0072
B. Working
• There are five hand gestures which can be recognizedbythecar.TheyareSTOP,RIGHT,LEFT, BACKWARD,FORWARD.
•ThefollowingareResultsofthehandgesturesused incontrollingthecar&ObstacleAvoidance.

TheintroductionofIoTandcombinationofIoTandphysical devicesmakeslifeeasier.Thetaskswhicharedangerousand hazardouscanbedoneveryeasily.TheintroductionofIoT also completes the tasks in a very short duration of time. Moreoverthehumanerrorsarereducedonagreatscaleand resultsareachievedwithgreataccuracy.
In conclusion, the obstacle avoidance system developed for the RC car has proven to be a significant enhancementtoitsfunctionalityandsafety.Byintegrating sensors,microcontrollers,andmotorcontrolmechanisms, wehavesuccessfullyenabledtheRCcartonavigatethrough a variety of environments while avoiding obstacles in its path.
[1] www.igniteinnovateideas.wordpress.co.in
[2] www.researchgate.net
[3] www.elprocus.com/accelerometer-based-gesturecontrol-robot/
[4] www.create.arduino.cc/projecthub
[5] J.Pradeep,Dr.P.VictorPaul”DesignandImplementation of Gesture Control Robotic Arm for Industrial Applications”, International Journal of Advanced Scientific Research & Development ,vol.03,pp.202209,Oct-Dec’2016
[6] Deepak Rasaily, Manoj Gurung, Nelson Rai, Rit Kr. KhawasandTashiRapdenWangchuk“BluetoothRemote ControlledCarusingArduino”.IJETT(Volume33Number8March2016).
[7] Article “AnAutomatedRobot-CarControlSystemwith Hand-GesturesandMobileApplicationUsingArduino”, by Saleem Ullah, Zain Mumtaz, Shuo Liu, Mohammad Abubaqr,AtharMahboobandHamza,AhmadMadni