
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN:2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN:2395-0072
ROSHINI .S.P [1], Dr.Thenmozhi [2]
PG scholar [1], Dept. of Communication systems Engineering, Government College of Engineering, Salem Professor [2], Dept. of Electronics and Communication Engineering, Government College of Engineering, Salem ***
ABSTRACT:
The plan of a stage for the conveyance of medication utilizing an independent drone. The framework utilizes SIMULINK to plan the robot no matter what the conveyance robot can find the way to the objective and flytothatobjectiveindependentlywiththeassistanceof the PC vision-based framework. Direction Landing Framework was integrated into the framework to help the robot's administrator or independent framework to choose the best arrival plots for landing. The arrival determination was based on the heading and power of the light. It conveys the conveyance bundle from the homeareatoclientareabymeansofthedevelopedway A test system is then changed and utilized as a premission instrument to foresee mission result and after approval.Aproficientpayloadframeworkisplannedand developed for the quadcopter to full fill its conveyance reason. When the robot is collected alongside the payload instrument, its actual boundaries are determinedutilizingSolidWorks.Similarboundarieslike executioncoefficients,thenrefreshedinthetestsystem's quadcopter properties. In the autonomous delivery mission, the quadcopter and simulator have been put through tests to compare results and show how speed, weather,andphysicalparametersaffectthem.
KEYWORDS: independent drone, SolidWorks, Framework,foreseemissionandquadcopterproperties
A Quadcopter is a rotor-based, automated elevated vehicle. Quadcopters mobility and track down applicationsindifferentfields.Theelementsofa quadcopter is profoundly non-direct. Besides, it is an under-activated framework with six levels of opportunityandfourcontrolinputs.Thepushaswellas the forces expected for shifting the quadcopter are the controlinputswhichdecidethemovementofthevehicle. Thepushaswellasforcesareproducedbychangingthe rotor speeds. The rotor blades always produce thrust in thesamedirectionasthequadcopter'scenter.Thusly,to accomplish impetus in a specific heading, the pivot of quadcopter ought to be shifted concerning the vertical. The translational movement of a quadcopter is thus combined with its rakish direction, making quadcopter elements and control exceptionally mind boggling. The
deficiency of quadcopter propeller cutting edges can cause the quadcopter to crash. Aside from the financial loses related with the harm to quadcopter parts, it can havemanyadverseresults.Lossofaquadcopterutilized for surveillance work can prompt loss of significant militaryinsightandcausesitsgamblebeingfoundbythe foe. In movie film making, warm imaging photography andsoon.,thehardwaremountedonthequadcopterare exorbitantandpropellerdisappointmentcanpromptthe harm of significant gear. In search and salvage activities in misfortune impacted districts, the disappointment of the quadcopter can prompt potential postponements, expandingtheendangerontheexistenceofimpacted
individuals. In material taking care of frameworks, disappointment might prompt harm of exorbitant parts. Added to this, there is likewise the gamble of the quadcopter crashing on to individuals and causing woundsparticularlyinbroaddaylightspaces
Unmanned Aerial Vehicles (UAVs), commonly known as drones, have emerged as versatile platforms with applications spanning various industries, including logisticsandhealthcare.TheintegrationofUAVsintothe healthcare sector presents a groundbreaking opportunity to revolutionize medical supply chain logistics. This project focuses on the design and simulation of a UAV drone system for the efficient and timely delivery of medical kits using MATLAB Simulink. The healthcare industry faces challenges related to timely access to critical medical supplies, especially in remote or disaster-stricken areas. Traditional delivery methods often struggle to overcome geographical constraintsandtime-sensitivedemands.TheuseofUAVs for medical kit delivery offers a solution to these challenges by providing rapid and reliable transportation. This project aims to employ Simulink, a powerful simulation tool, to model and analyze the dynamicsofaUAVdronesystemtailoredformedicalkit delivery. Simulink provides a platform for comprehensive modeling, simulation, and testing of complex systems, allowing for a detailed examination of the drone's performance under various conditions. The UAVdronedesignedinthisprojectwillbeequippedwith a secure and temperature-controlled compartment to ensure the integrity of medical supplies during transportation.Thesystemwillbeoptimizedforefficient route planning, obstacle avoidance, and real-time monitoring, all crucial aspects for a successful medical
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net
kit delivery mission. Furthermore, the project will explore the integration of communication technologies, such as GPS and wireless data transmission, to enable seamless tracking of the UAV and facilitate communication between the drone and ground control. This connectivity ensures precise navigation, enhances safety, and allows for immediate response to any unforeseencircumstances.
The simulation results obtained through Simulink will provideinsightsintotheperformancemetricsoftheUAV drone system, including delivery time, energy consumption, and reliability. This information will be instrumental in refining the design and optimizing the operational parameters to meet the specific requirementsofmedicalkitdelivery.
In summary, the integration of UAV technology into medical kit delivery systems holds immense potential for transforming healthcare logistics. This project,utilizingSimulink,aimstodesignandsimulatea UAVdronesystemthatnotonlyaddressesthechallenges associated with medical supply chain logistics but also sets the stage for a more resilient and responsive healthcareinfrastructure.
Quadcopters have applications in many fields, some of which are recorded underneath. Observation -used to assemble Milit insight by exploring adversary domain. They are able to move without being noticed because of their small size and low noise level. Elevated reconnaissance-streetwatch,homesecurity,theruleof law.Quadcoptersareidealforaerialsurveillancedueto their wide field of view and ease of movement between points in the air, especially when equipped with powerful cameras. Utilized in movie film making and photography for flying shots and perspectives. Help for search and salvage activities in catastrophe struck regionsorintheeventoffire.
Utilized in mechanization frameworks in enterprises for material taking care of purposes. Conveyance of merchandise and things. Utilized for3Ddemonstrating of territories or enormous designs too as warm imaging. Electronic Speed Control (ESC) wear out - ESC might wearoutifthecurrentsurpassesthegreatestreasonable current.ThiscausesthepropellerrelatedwiththeESCto quitturningandcanpromptdisappointment
3.1 The flying sidekick traveling salesman problem: Optimization of drone assisted parcel delivery
In the main led examinations toward this path resolved two issues connected with drone based conveyance related to trucks to limit the outing time for both the robot and the truck while getting back to the stop. The firstproblemthatwasdealtwithwastheflyingsidekick traveling salesman problem, which was solved using a mixedintegerlinearprogramming(MILP)formulationto reducetheexpecteddeliverytimebyassigningthedrone to the truck to deliver packages to customers. With respect to issue, the creators proposed a heuristic methodology called "Truck First, Robot Second", where the truck way is intended to determine the mobile sales rep issue. The truck goes along a course that starts at a terminal, serves clients an route, then, at that point, wrapsupatthe terminal.Thesubsequentissuehandled wasthemobilesalesrepissuewithequalrobotplanning. Rather than the primary issue, this issue thinks about thattherobotandthetruckperformconveyancesfreely. The heuristic approach proposed for this issue accepts thattherobotswillserveallthe
clients inside their most extreme reach, while the truck will serve the excess clients. In contrast, a number of assumptions were later made to simplify the model, including the authors' assumption that the number of drones is very small, that a drone's flight velocity and durationareconstant,thatthedronepreparationisdone byapersoninthevehicle(ratherthanbythedrone),and that the depot is close to all customers' centers. In any case,theconveyanceissueisviewedasastochasticissue and involves a huge armada of completely independent robotsintheconveyanceframework,inthiswaymaking thedemonstratingexceptionallytesting.
Delivery. arXiv 2016,. [Google Scholar] [Cross Ref][GreenVersion]
In this thought about cases, ordered the important related works under four significant gatherings, which address the principal research roads by including a progression of related difficulties also, imperatives looked by these robots based coordinated factors frameworks. Subsequently, the principal research issues and difficulties can be summed up under the accompanyingheadings:(1)vehicledirectingissuewith drones; ( 2) the issue of the assigned drone; 3) the charging procedure and the location of the charging station; 4) armada dimensioning. While considering the Vehicle Directing Issue with Robots (VRPD), a large portion of the writing has tended to half and half
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN:2395-0072
conveyance frameworks, which join two conveyance modes: the vehicle-based conveyance framework and therobot-basedconveyancemode.Mostissueswithlastmile conveyance with drones recommend that the ethereal vehicle is shipped close to the objective of the bundlebygroundvehicles.Fromhere,whiletherobotis conveying a bundle, the van can serve different clients who are not reachable by drone. Thus, the robot will actually want to keep serving all clients who are inside its flight zone, expanding ease of use and making the timetablemoreAdaptable.
3.3 The vehicle routing problem with drones: Extended models and connections. Networks 2017,70,34–43.[GoogleScholar][CrossRef]
The primary issue manages the expense issue of a conveyance time imperative, and the second issue looks tostreamlinetheconveyancetimesubjecttoanexpense limit.Moreover,theproposedcalculationstrytoupgrade the robot armada size as well as the excursions for the conveyanceofthebundle.Theauthorsassumedthatthe operator only deploys one depot (charging station) in the area and that the operator has sufficient fully charged batteries to meet the drone's energy needs before deliveries could begin. Interestingly, it would be extremely difficult and pensive for a conveyance organizationtosendnumerousstopsandbatterytrading stations, as well as to oversee battery trading between trips
3.4 An optimization-driven dynamic vehicle routing algorithm for on-demand meal delivery using drones. Comput. Oper. 2019, 111, 1–20. [GoogleScholar][CrossRef]
The proposed drone-vehicle conveyance way could build the normal conveyance time contrasted with the robot direct conveyance mode. Moreover, the correspondence innovation of robots to vehicles, which permitstherobottogathervehicletripdata,isstillinthe beginning phases of purpose in the operations business. It proposed a blended whole number programming (MIP) model to address the unique pickup and conveyance issue, accepting that the conveyance framework is supported by charging stops for trading batterieswhentherobot'sbatteryispracticallydepleted. Additionallyaddedtothe
writingonthere-energizing stationsendingissue. The creators talked about drone dinner conveyance issues for cafés, where an organization of charging stations is proposed to help robots' restricted flight range. A heuristicoptimizationmodelwasproposedtodetermine the best location and number of recharging stations to maximizecoverageunderasetofconstraints.
Utilized in mechanization frameworks in enterprises for material taking care of purposes. Conveyance of merchandise and things. Utilized for 3D demonstrating ofterritoriesorenormousdesigns tooaswarmimaging. Electronic Speed Control (ESC) wear out – ESC might wearoutifthecurrentsurpassesthegreatestreasonable current.ThiscausesthepropellerrelatedwiththeESCto quitturningandcanpromptdisappointment
4.1ADVANTAGES:
AssociationsthattakeonModel-BasedPlanacknowledge investment funds going from 20 − 60%, when thought abouttocustomarytechniques.Thegreaterpartofthese investment funds come from better necessities investigation joined with right on time and ceaseless testing and confirmation. As necessities and plans are recreated utilizing models, surrenders are uncovered a whole lot sooner in the improvement cycle, when they arerequestsofsizelessexpensivetofix.
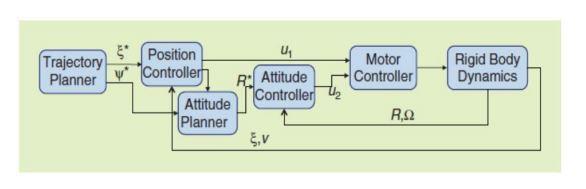
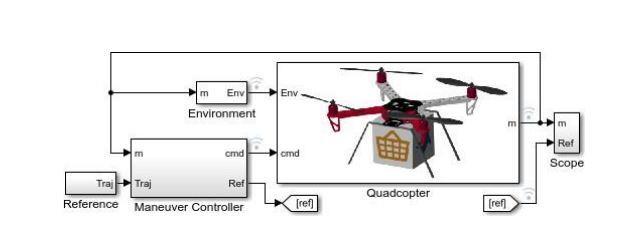
1. Dynamics Model:
Begin by modeling the UAV drone dynamics. Use Simulink blocks for six-degree-of-freedom (6DOF) to representthedrone'smotion.Defineparameterssuchas mass, inertia, and aerodynamic coefficients based on yourdronespecifications.
2. Control System:
Develop a control system to stabilize and control the UAV's movement. You can use PID controllers or other control algorithms depending on your requirements. Connect the control system to the dynamics model to createaclosed-loopcontrolsystem.
3. Navigation and Waypoints:
Implement a waypoint navigation system using Simulink blocks. Define waypoints that represent the desired path for the drone. Integrate a path-following algorithm to guide the drone along the defined waypoints.
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN:2395-0072
4. Package Release Mechanism:
Design a mechanism to simulate the release of the medikit package. Use logical blocks or triggers in the control logic to initiate the release action at a specific location.
5. Communication System:
Model a communication system to receive commands and send telemetry data. Utilize Simulink blocks to represent communication components. Consider incorporating error handling mechanisms for robust communication.
6. Obstacle Avoidance:
Integrate obstacle detection and avoidance mechanisms into your model. Use Simulink blocks to simulate the drone's response to obstacles and implementcollisionavoidancelogic.
7. Simulation Configuration:
Set up simulation parameters such as the simulation time, solver settings, and other relevant configurations. Ensure that the simulation environment reflects realworldconditionsfortestingandvalidation.
8. Visualization:
Use Simulink 3D Animation blocks to visualize the drone's movement and the medikit package delivery process. Incorporate appropriate visualization elements to monitor the drone's behaviour during the simulation. Remember, this guide is meant to help you structure your Simulink model. Be creative in implementing your specific drone characteristics, control algorithms, and delivery scenarios. This approach will ensure that your model is unique and tailored to your project requirements.
The three unique regulators utilized for the demeanor control; a stage input is offered as the ideal benefit for every one of the disposition factors. Parameters like rise/fall time and percentage overshoot/undershoot are used in the comparison. Taking a gander at the step reaction for, it is obvious that LQR regulator shows the best execution as the fall time is least and there is no
huge undershoot. The mix of FBL and PD regulator shows a nearly slower reaction with some undershoot. PID regulator shows relatively terrible showing as the fall is exceptionally steady and it requires a long investment to settle, however without any motions. All thethreeregulatorsarriveattheconsistentstateesteem without any motions, thus settling time isn’t viewed as heretoconveythebundle.
In this undertaking I have effectively proposed mimicking UAVs drone, which is accommodating in givingfundamentalmedsinregionswheretypicaltraffic transportationsadministrationsarenotandadditionally in districts where the geological landscape is not good for conventional transportation strategies. Furthermore, critical applications come in crisis circumstances like floods tremor and so on. where the occupant and specialists need essential medications which can be conveyed effectively by means of our medication drone conveyance framework. Thirdly, this Robot comes helpful in urban communities moreover. The rising populace and colossal expansion in confidential vehicles oncitystreetshaveexpandedtrafficblockagesmakingit hard for the conventional conveyance frameworks to workactually.
In this errand only single way followed for true way and course of action by using Simulink is proposed. In future, more number different sort of way estimations areaccumulatedandforareaofimpedimentsinUAVare recognized
[1] B. Heemstra, “Linear quadratic methods applied to quadrotor control”. M.S. thesis, University of Washington.2010.
[2] C. Balas, “Modeling and linear control of a quadrotor”. M.S. thesis, Cranfield University. 2007. https://dspace.lib.cranfield.ac.uk/bitstream/1826/2417 /1/Modelling%20and%20Linea r%20Control% 20of%20a%20Quadrotor.pdf
[3] S. Bouabdallah, A. Noth, and R. Siegwart, “PID vs LQ control techniques applied to an indoor micro quadrotor”, 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2004. (IROS 2004). Proceedings,vol.3,pp.1-6.
[4] P. Castillo, A. Dzul, and R. Lozano, “Real-time stabilizationandtrackingofafourrotorminirotorcraft”, IEEE Transactions on Control Systems Technology, Vol 12,No4,July,2004.
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN:2395-0072
[5] P. McKerrow, P., "Modelling the Draganflyer four rotorhelicopter",2004IEEEInternationalConferenceon Robotics and Automation, April 2004, New Orleans, pp. 3596.
© 2024, IRJET | Impact Factor value: 8.226 | ISO 9001:2008 Certified Journal | Page511