
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN: 2395-0072
Ms. Shital Dhumane1, Tejas Gangurde2, Aakanksha Khole3, Tejas Bhosale4
1Professor, Electronics and Telecommunication
MVP'S Karamveer Adv. Baburao Ganpatrao Thakare College of Engineering, Nashik
2Student, BE Electronics and Telecommunication
MVP'S Karamveer Adv. Baburao Ganpatrao Thakare College of Engineering, Nashik
3Student, BE Electronics and Telecommunication
MVP'S Karamveer Adv. Baburao Ganpatrao Thakare College of Engineering, Nashik
4Student, BE Electronics and Telecommunication
MVP'S Karamveer Adv. Baburao Ganpatrao Thakare College of Engineering, Nashik
Abstract - There is a broad usage of automobile vehicles in the Transport and Logistic industry, In-house transportation as well as roadways transportation. But this process demands for a huge man power which brings up human physical limits in the process. During roadways, driversareemployedto drive the heavy transport vehicles for a long duration which makes transportation slow and less efficient, as human drivers require rest to drive at full focus. This human limitation increases the delivery time. In-House transportation in places such as large warehouses where ample of human labor is employed to load and unload the goods, is still a human dependent process, all these manual driving and transportation can be automated using ADAS (Advanced driver assistance systems) By developing an autonomous selfdriving vehicle for transportation of goods in large warehouses, efficiency and productivityofthetaskisimproved and human labor is reduced. The primary purpose of the work is to develop an autonomous vehicle of level 1 to level 2 ADAS for the transport and logistics industry and a self-driving driverless vehicle in large warehouses. This work architecture will be focused on installation of these ADAS systems on preexisting vehicles externally making the systemportable.These autonomous vehicles will consist of LiDAR sensors for 3D mapping and obstacle detection, and microcontrollers will be used to process the data generated by the LiDAR sensor and give inputs to the vehicle accordingly. This work will deliver autonomous vehicle architecture and anexternallyinstallable system for the transport and logistics industry.
Key Words: LiDar, Obstacle detection, Obstacle avoidance
As we are observing that there is great enhancement in ADAStechnology.DuetothisAutonomousvehiclearetaking a big leap in the automotive industry. In this field the researchersarefacingthedifficultyofsafetyofpassengers, besidesthebiggestchallengeofselfdrivingcarsistoface, judgeandreactcorrectlytotheobstaclesthatcomeacross. To face and overcome this difficulty the self-driving cars
shouldbemountedwithrequiredsensorsthatinterpretand processthedatainrealtime.Thesensorswhichcanbeused are Radars, Global Positioning System (GPS), and LIDARs. AmongallofthesetheLidarsensorismostimplementable and suitable for self-driving cars. Speaking of the LIDAR sensor, it is used for obstacle detection which detects the obstaclesin360°. The main aimofLIDAR is to detect and analyzewhethertheobjectisrealorfakeandhowtoavoid it.Thismechanismofobstacleavoidanceisnotonlylimited to self-driving cars. This same mechanism can also be implementedinrobotsfortransferofgoods,homecleaning etc.
AngeloNikkoCatapangandManuelRamos[1],Presentsthat thestudyfocusesoninexpensive2Dlidar,especiallythelowcostLIDAR-Litev1,andevaluatesitsdependability,efficacy, andpotentialintegrationwithothersensorswiththegoalof improvingautonomousvehicles'obstacledetectioninurban settings.
DeepaliGhorpade,AnuradhaD.Thakare,SunilDoiphode[2], It presents through the use of point cloud segmentation, clustering, and a convex hull algorithm validated via MATLAB simulation, the suggested approach improves visibility, path planning, and the effectiveness of obstacle avoidance.
NikolaosBaras,GeorgiosNantzios,DimitrisZiouzios,Minas Dasygenis[3],itelaboratesforreal-timeobstacleavoidance andnavigation,thisstudyusesRPLidarandRaspberry Pi, addingWi-Fiforindoorpositioning.Byeffectivelymanaging sensor data, the suggested algorithm for dynamic vehicle controltacklesthedifficultiesassociatedwithautonomous driving.
TRMadhavan,MAdharsh[4],It Presentsthattheproven MATLAB-basedobstacledetectionandavoidancealgorithm, providing a simple yet effective approach to the advancementofobstacleavoidancetechnologies.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN: 2395-0072
R.NeumanndeCarvalho,H.A.
Vidal,P.Vieira,M.I.Ribeiro[5],
Presentsthosechallengesin large-scaleautonomousfloor cleaning, presenting a template-based path planning approach based on an existing 2D map. To improve efficiency, ultrasonic data is creatively used for obstacle detection.Thismethod,whichusesabehavior-basedpath tracking strategy, works well with inexpensive navigation modulesandmaybeusedincommercialvacuumcleanersin thefuture.
BehnamBehroozpour,PhillipA.M.Sandborn,MingC.Wu, and Bernhard E. Boser [6], The article discusses the continuousresearcheffortstocreateaffordableandeffective lidar solutions, which are necessary for a variety of applications like drones, robots, and diverse industries requiring3Dimagingtechnology,inadditiontoself-driving cars.
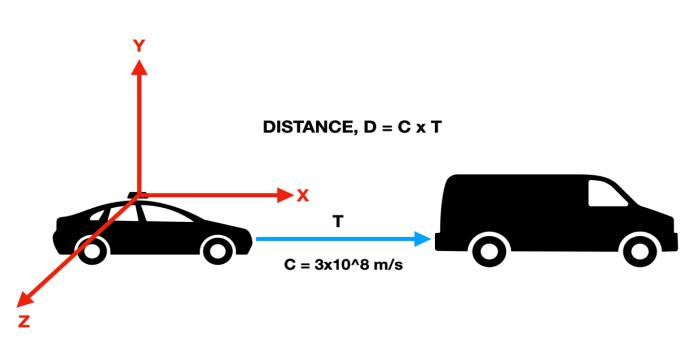
Lidar sensor uses light to measure distances and scan surroundingsforautonomousvehicleswhichprovideshigh accuracy,precisioninobjectdetectionandrecognitionof3D object in ADAS. Lidar is a ranging device which measures distancefromcartoanobstacle.Itmeasuresthedistanceby sending a short laser pulse and recording the time lapse between the outgoing light pulse and the reflected light pulse.Lidarsystemprovides3Dmappingofsurfaceobjects thatmaybeencounteredbytheautonomousdrivingvehicle. TheLIDARsensoremitsthelaserbeamcontinuouslyin360 degreesofthevehicleandarereflectedbackbytheobjects in the way. Lidar sensor is very precise in terms of directionality.
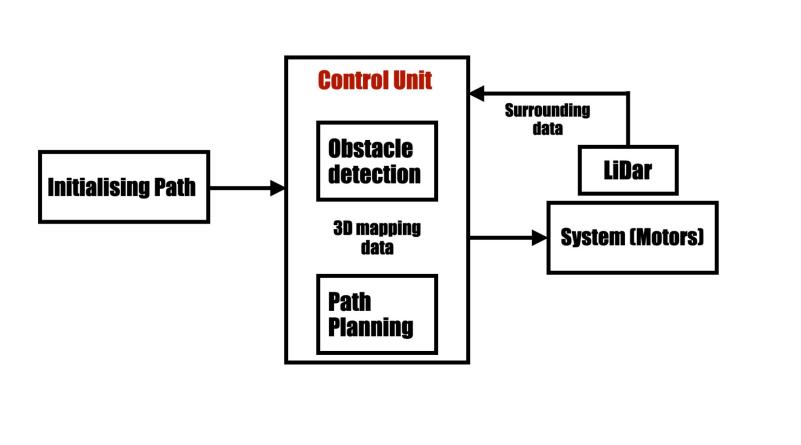
The concept of the system is majorly described as a selfdrivingcarwhichincludessensorsandmoduleswhichare mounted on the vehicle. According to the block diagram, there includes a processing unit which includes all the sensorsandwhichtakesthe data asinputandmakesreal timedecisionaccordingly.Thecommunicationmodeltakes thedataasinputfromtheLidarandsendsthedatatothe microcontrollerforfurtherprocessing.Themicrocontroller
analyzesthedata,interpretitandsendstheinformationto thevehicle.
ForthesoftwarerelatedworkraspberryPi2/3/4isusedas it is very powerful because of many GPIO pins. Firstly, Arduino will be used for testing purposes. After that for performing simulation Arduino will be replaced by a microcontroller.Lastlyallthedatawillbegatheredsohere sensorintegrationwillbedone.Thisisthefeasibilityofthe workhenceitwillbeachievedatthisstage.
Transportation and logistics industry: With features like adaptivecruisecontrolandcollisionavoidance,thisgamechangingsolutionforlogisticsandtransportationimproves safety by solving important issues. With real-time monitoring,itoptimizesoperational efficiencyandlowers theriskofaccidentswhileeasilyadjustingtothedifferent kindsofvehiclesusedintheindustry.
Home Automation: Cleaning robots with excellent room mappingcapabilitiesarepoweringhomeautomation,which ischangingmodernliving.Theseclevergadgetsusemapping algorithms and sensors to navigate and clean effectively. They allow personalized cleaning schedules and focused areacleaning,offeringapreviewofthetime-savingfeatures thatwilldefinehomeautomationinthefuture.
AutomobileIndustry:Inthisimportantfeatureislaneassist, which tracks the position of the vehicle in the lane using cameras and sensors. In order to stop accidental lane departure, it offers corrective interventions like steering adjustments.Withtheuseofsensorsandcameras,Parking Assisthelpsdriversparkautomaticallyineitherparallelor perpendicularspaces.
Portable (Externally Installable System): It can be easily installedonavarietyofmanuallydrivenvehicleswithoutthe need for extensive modifications. This portability ensures accessibilityandflexibility.ADASLevel1toLevel2:Level1 toLevel2autonomyisincludedinthesystem.Thisindicates
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN: 2395-0072
that it offers a range of functions that improve driver convenience and safety, such as adaptive cruise control, lane-keeping assistance, and collision avoidance. Reduced HumanDependency:Thesystemlessensrelianceonhuman drivers for routine tasks like keeping a safe following distance,stayinginone’slane,and respondingtopossible obstacles by integrating ADAS functionalities. Obstacle DetectionandAvoidanceSystem:Thesystemmakesdriving saferbyusingsensorsandreal-timedataanalysistoidentify obstacles in the path of the car and automatically start avoiding collisions. 3D Mapping-Based, Efficient Path Tracking: By utilizing 3D mapping technology, the system effectivelymonitorsthepathofthevehicle.Time-Efficient Deliveries:Deliverytimesareacceleratedandimprovedby thesystem’scapacitytoself-manageroutinedrivingtasks, navigatetraffic,optimizeroutes,andnavigateitall.
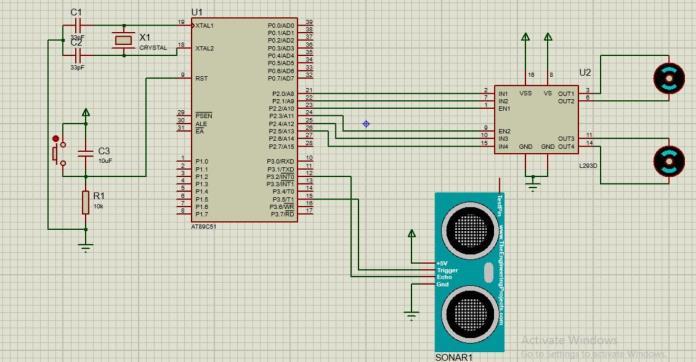
The UV sensor will be mounted on the vehicle which will rotate 90 degrees and gather the information of the surroundings.Itwilldetecttheobstaclesinitspath.Forthe detectionofobstaclesin360degreesaLidarsensorwillalso bemounted.Herethesensorintegrationpartwillbecarried, thesensorswillgatherinformationaboutthesurroundings and pass the information to the microcontroller. The microcontrollerwilltheninstructtheDCmotorstoturnthe vehicle left/right accordingly. In this way the vehicle will decideitspathandmoveforwardwithoutanydifficulty.
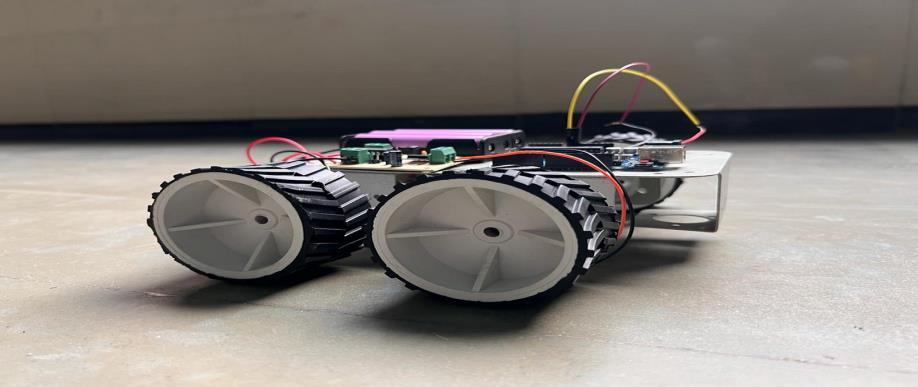
Abovefigdisplaystheprototypeoftheworkwhichconsists of necessary sensors, microcontroller, DC motors and batteries.Thissizeoftheprototypeaidsinefficienthandling andbetterunderstandingofthework
The goal of this work is to develop an Advanced Driver Assistance System (ADAS) that can be installed externally andisspecificallydesignedformanuallyoperatedvehicles. This portable and unique design will find application in a varietyoffields,includinghomeautomation,transportation, andtheautomotiveindustry.Thisworkstrategicgoalisto fullyautomatedrivingexperiencesbyimplementingLevel3 toLevel4ADASsystemsinthetransportationandlogistics industry.Additionally,theworkaimstoofferADASsolutions thatareportableandwidelyaccessibleforarangeoftwowheeler automobile vehicles. This initiative, which recognizesthegrowingdemand,representsthefirststageof automation in the transportation sector and has the potentialtotransformefficiencyandsafetyinresponseto the industry's increasing need for expert automated solutions.
[1] N. Baras, G. Nantzios, D. Ziouzios and M. Dasygenis,” AutonomousObstacleAvoidanceVehicleUsingLIDARand anEmbeddedSystem,”20198thInternationalConferenceon Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 2019, pp. 1-4, doi: 10.1109/MOCAST.2019.8742065.
[2]A.N.CatapangandM.Ramos,”Obstacledetectionusinga 2D LIDAR system for an Autonomous Vehicle,” 2016 6th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 2016,pp.441-445,doi:10.1109/ICCSCE.2016.7893614.
[3]D.Ghorpade,A. D. ThakareandS. Doiphode,” Obstacle DetectionandAvoidanceAlgorithmforAutonomousMobile Robotusing2DLiDAR,”2017InternationalConferenceon Computing, Communication, Control and Automation (ICCUBEA), Pune, India, 2017, pp. 1-6, doi: 10.1109/ICCUBEA.2017.8463846
[4]ErkeShang,XiangjingAn,Member,JianLiandHangen,” A Novel Setup Method of 3D LIDAR for Negative Obstacle DetectioninFieldEnvironment”.IEEEITSC2014.
[5]Behroozpour,Behnam,etal."Lidarsystemarchitectures andcircuits."IEEECommunicationsMagazine55.10(2017): 135-142.
[6] Raj, Thinal, et al. "A survey on LiDAR scanning mechanisms."Electronics9.5(2020):741.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 02 | Feb 2024 www.irjet.net p-ISSN: 2395-0072
[7]Royo,Santiago,andMariaBallesta-Garcia."Anoverview oflidarimagingsystemsforautonomousvehicles."Applied sciences9.19(2019):4093.
[8] Du, Xinxin, Marcelo H. Ang, and Daniela Rus. "Car detectionforautonomousvehicle:LIDARandvisionfusion approachthroughdeeplearningframework."2017IEEE/RSJ InternationalConferenceonIntelligentRobotsandSystems (IROS).IEEE,2017.
[9]Xie,Desheng,YouchunXu,andRendongWang."Obstacle detection and tracking method for autonomous vehicle basedonthree-dimensionalLiDAR."InternationalJournalof Advanced Robotic Systems 16.2 (2019): 1729881419831587.
[10] Li, You, and Javier Ibanez-Guzman. "Lidar for autonomousdriving:Theprinciples,challenges,andtrends forautomotivelidarand perceptionsystems."IEEESignal ProcessingMagazine37.4(2020):50-61.
[11] Rasshofer, Ralph H., and Klaus Gresser. "Automotive radarandlidarsystemsfornextgenerationdriverassistance functions."AdvancesinRadioScience3(2005):205-209.
[12] De Carvalho, R. Neumann, et al. "Complete coverage path planning and guidance for cleaning robots." ISIE'97 Proceeding of the IEEE International Symposium on IndustrialElectronics.Vol.2.IEEE,1997.