1 minute read
Elektronisches Stabilitäts Programm (ESP) (SA-Option) - Funktionsbe- schreibung


Betrieb
M54.00-1837-71
Hinweis:
Es wird empfohlen, bei auftretenden Traktionsproblemen im Fahrbetrieb mit Gleitschutzketten bzw. Befahren von Strecken mit losem Untergrund (z. B. Sand- und Schotterstrecken) das Elektronische Stabilitäts Programm (ESP) mit dem Taster "ESP-Abschaltung" (3) auszuschalten.
Elektronisches Stabilitäts Programm (ESP) (SA-Option) - Funktionsbeschreibung Funktionen:
Funktion Elektronisches Stabilitäts Programm (ESP) Initialisierungsphase Fahrverhalten beim Untersteuern Fahrverhalten beim Übersteuern
Funktion Elektronisches Stabilitäts Programm (ESP)

M54.00-1838-71 Erkennt das ESP im Fahrbetrieb eine kritische Fahrsituation, werden zur Stabilisierung des Fahrzeugs automatische Regeleingriffe wirksam durch: – Verringern der Motorleistung. – Gezieltes radweises Eingreifen in das Bremssystem des Fahrzeugs. – Einbremsen des gesamten Fahrzeugs.
Hinweis:
Während eines Eingriffs des Elektronischen Stabilitäts Programms (ESP) blinkt die Kontrollleuchte (1).
Hinweis:
Die Fahrdynamikregelung (FDR) ist nur bei fahrendem Fahrzeug und einer Geschwindigkeit über 10 km/h wirksam. Bei eingelegtem Rückwärtsgang ist die Fahrdynamikregelung (FDR) ohne Funktion.
Betrieb
Hinweis:
Das Elektronische Stabilitäts Programm (ESP) wird automatisch ausgeschaltet bei einer Störung des ESP und bei einer funktionsrelevanten Störung im Elektronischen Bremssystem (EBS).
Initialisierungsphase
M54.00-1838-71 Nach jedem Einschalten des Zündstartschalters bis zur Fahrt der ersten Meter wird das Elektronische Stabilitäts Programm (ESP) initialisiert und die Sensoren auf Funktion geprüft. Die Fahrdynamikregelung (FDR) ist während der Initialisierungsphase noch nicht in Funktion, während die Antriebs-Schlupf-Regelung (ASR) funktioniert. Ist die Funktion gewährleistet, so endet die Initialisierung und das System ist einsatzbereit. Während der Initialisierungsphase leuchtet die Kontrollleuchte (1).
Fahrverhalten beim Untersteuern

M42_25_0003_01 Das Fahrzeug schiebt abweichend vom Sollkurs (1) über die Vorderachse zum äußeren Fahrbahnrand (2). Durch gezieltes Abbremsen des kurveninneren Hinterrades (3) wird das Fahrzeug wieder stabilisiert.
Hinweis:
Bild beispielhaft für 2-Achs-Fahrzeuge. Bei 3-Achs-Fahrzeugen mit RAS-Achse wird die 3. Achse gegebenenfalls separat geregelt.
Fahrverhalten beim Übersteuern
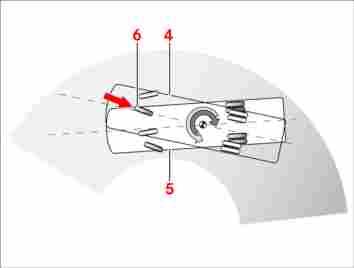
M42_25_0002_01 Das Fahrzeug bricht über die Hinterachse aus. Abweichend zum Sollkurs (4) dreht sich das Fahrzeug zum inneren Fahrbahnrand (5). Durch gezieltes Abbremsen des kurvenäußeren Vorderrades (6) wird das Fahrzeug wieder stabilisiert.