https://ebookmass.com/product/unmanned-driving-systems-for-
Instant digital products (PDF, ePub, MOBI) ready for you
Download now and discover formats that fit your needs...
Robot Systems for Rail Transit Applications 1st Edition Hui Liu
https://ebookmass.com/product/robot-systems-for-rail-transitapplications-1st-edition-hui-liu/
ebookmass.com
Wind Forecasting in Railway Engineering Hui Liu
https://ebookmass.com/product/wind-forecasting-in-railway-engineeringhui-liu/
ebookmass.com
Ferroic materials for smart systems from fundamentals to device applications Dai
https://ebookmass.com/product/ferroic-materials-for-smart-systemsfrom-fundamentals-to-device-applications-dai/
ebookmass.com
A Baron's Scandalous Quill: A Historical Regency Romance
Novel Henrietta Harding
https://ebookmass.com/product/a-barons-scandalous-quill-a-historicalregency-romance-novel-henrietta-harding/
ebookmass.com
https://ebookmass.com/product/%e4%bc%8a%e5%b7%9d%e6%84%9b%e6%a2%a8%e5%86%99%e7%9c%9f%e9%9b%86%e3%80%8c%e4%ba%8c%e4%ba%ba%e3%81%a0%e3%81% 91%e3%81%ae%e4%b8%96%e7%95%8c%e3%80%8d-best-shotbooks-%e4%bc%8a%e5%b7%9d%e6%84%9b%e6%a2%a8/ ebookmass.com
Netter Atlas of Human Anatomy: 8th edition A Systems Approach Frank H. Netter Md
https://ebookmass.com/product/netter-atlas-of-human-anatomy-8thedition-a-systems-approach-frank-h-netter-md/
ebookmass.com
Diagnostic Imaging: Musculoskeletal Non-Traumatic Disease 3rd Edition Authors: Kirkland W. Davis
https://ebookmass.com/product/diagnostic-imaging-musculoskeletal-nontraumatic-disease-3rd-edition-authors-kirkland-w-davis/
ebookmass.com
Groundwater Sustainability: Conception, Development, and
Application
Robert E. Mace
https://ebookmass.com/product/groundwater-sustainability-conceptiondevelopment-and-application-robert-e-mace/
ebookmass.com
Present Knowledge in Food Safety : A Risk-Based Approach Through the Food Chain Michael E. Knowles
https://ebookmass.com/product/present-knowledge-in-food-safety-a-riskbased-approach-through-the-food-chain-michael-e-knowles/ ebookmass.com
Ali Hazelwood Complete collection : 9 books : The Love
Hypothesis ; Under One Roof ; Stuck With You ; Below Zero ; Love on the Brain ; Loathe to Love You ; Love,
Theoretically ; Check & Mate; Bride ; Not in Love Ali Hazelwood
https://ebookmass.com/product/ali-hazelwood-completecollection-9-books-the-love-hypothesis-under-one-roof-stuck-with-youbelow-zero-love-on-the-brain-loathe-to-love-you-love-theoreticallycheck-bride/ ebookmass.com
UnmannedDrivingSystemsfor SmartTrains
UnmannedDriving Systemsfor SmartTrains
HuiLiu
SchoolofTrafficandTransportationEngineering,CentralSouth University,Changsha,Hunan,China
Elsevier
Radarweg29,POBox211,1000AEAmsterdam,Netherlands
TheBoulevard,LangfordLane,Kidlington,OxfordOX51GB,UnitedKingdom 50HampshireStreet,5thFloor,Cambridge,MA02139,UnitedStates
Copyright©2021CentralSouthUniversityPress.PublishedbyElsevierLtd.AllRightsReserved.
Nopartofthispublicationmaybereproducedortransmittedinanyformorbyanymeans, electronicormechanical,includingphotocopying,recording,oranyinformationstorageand retrievalsystem,withoutpermissioninwritingfromthepublisher.Detailsonhowtoseek permission,furtherinformationaboutthePublisher’spermissionspoliciesandour arrangementswithorganizationssuchastheCopyrightClearanceCenterandtheCopyright LicensingAgency,canbefoundatourwebsite: www.elsevier.com/permissions.
Thisbookandtheindividualcontributionscontainedinitareprotectedundercopyrightbythe Publisher(otherthanasmaybenotedherein).
Notices
Knowledgeandbestpracticeinthisfieldareconstantlychanging.Asnewresearchand experiencebroadenourunderstanding,changesinresearchmethods,professionalpractices,or medicaltreatmentmaybecomenecessary.
Practitionersandresearchersmustalwaysrelyontheirownexperienceandknowledgein evaluatingandusinganyinformation,methods,compounds,orexperimentsdescribedherein. Inusingsuchinformationormethodstheyshouldbemindfuloftheirownsafetyandthesafety ofothers,includingpartiesforwhomtheyhaveaprofessionalresponsibility.
Tothefullestextentofthelaw,neitherthePublishernortheauthors,contributors,oreditors, assumeanyliabilityforanyinjuryand/ordamagetopersonsorpropertyasamatterof productsliability,negligenceorotherwise,orfromanyuseoroperationofanymethods, products,instructions,orideascontainedinthematerialherein.
BritishLibraryCataloguing-in-PublicationData
AcataloguerecordforthisbookisavailablefromtheBritishLibrary LibraryofCongressCataloging-in-PublicationData
AcatalogrecordforthisbookisavailablefromtheLibraryofCongress
ISBN:978-0-12-822830-2
ForInformationonallElsevierpublications visitourwebsiteat https://www.elsevier.com/books-and-journals
Publisher: MatthewDeans
AcquisitionsEditor: GlynJones
EditorialProjectManager: NaomiRobertson
ProductionProjectManager: PoulouseJoseph
CoverDesigner: MatthewLimbert
TypesetbyMPSLimited,Chennai,India
1.Introductionofthetrainunmanneddrivingsystem 1
1.1Overviewofthetrainunmanneddrivingsystem 1
1.1.1Historyofunmanneddrivingtechnology3
1.1.2Theoperationlevelsofautomatictrains6
1.1.3Themainfunctionsanddevelopmentofunmanned drivingtrains9
1.1.4Theapplicationfieldsofartificialintelligencein unmanneddrivingtechnology13
1.1.5ThedevelopmentofunmanneddrivinginChina17
1.1.6Achievementsanddevelopingtrendswiththe cooperativeinitiativeofthebeltandroad19
1.2Thekeyissuesoftheunmanneddrivingsystem 21
1.2.1Themaincontrolsystemsofunmanneddrivetechnology22
1.2.2Thescenariodescriptionofunmanneddriving23
1.2.3Theinformationintegrationoftrainscheduling25
1.2.4Importantequipmentofunmanneddriving26
1.2.5Energy-savingmethodsforhigherperformance andlowerconsumption28
1.2.6Detectiontechnology30
1.2.7Systematicreliability31
1.2.8Designofsafetyassessmentsystem32
1.2.9Intelligentmaintenanceandoperation33
1.3Thescopeofthebook 35
1.3.1Thesubsystemsandperformanceevaluation systemofunmanneddriving36
1.3.2Themaintrainingalgorithms36
1.3.3Researchofmaincontrolparameters37
1.3.4Dataminingandprocessing37
1.3.5Researchofenergysaving38
1.3.6Theestablishmentofthesimulationplatform ofalgorithms38
References 39
2.Trainunmanneddrivingsystemandits comprehensiveperformanceevaluationsystem 47
2.1Overviewofautomatictrainoperation/automatic trainprotection/automatictrainsupervisionsystems 47
2.1.1Thedevelopmentoftheautomatictrain controlsystem47
2.1.2Thestructureandfunctionofautomatictraincontrol systems59
2.1.3Theapplicationofautomatictraincontrolsystems69
2.2Theperformanceindicesofthetrainunmanned drivingsystem 78
2.2.1Theperformanceindicesoftheautomatictrain operationsystem78
2.2.2Theperformanceindicesoftheautomatictrain protectionsystem84
2.2.3Theperformanceindicesoftheautomatictrain supervisionsystem87
2.3Thecomprehensiveperformanceevaluationmethods ofthetrainunmanneddrivingsystem 88
2.3.1Comprehensiveevaluationfunction89
2.3.2Analysisofautomatictrainoperation hierarchicalstructure92
2.3.3Comprehensiveweightdeterminationmethod basedonanalytichierarchyprocess-entropy96 References 96
3.Trainunmanneddrivingalgorithmbasedon reasoningandlearningstrategy 101
3.1Thecurrentstatusandtechnicalprogressoftrain unmannedcontrollingalgorithm 101
3.2Theconnotationandcompositionoftrain unmanneddrivingalgorithm 105
3.2.1Researchonthespeedcontrolofrailwayvehicles105
3.2.2Studyonrailwayvehiclenavigationsystem109
3.2.3Studyonrailwayvehiclepathplanning112
3.2.4Studyontargetdetectionofrailwayvehicles116
3.3Calculationprocessandanalysisoftrainunmanned drivingalgorithm 117
3.3.1Positioningandnavigationalgorithm117
3.3.2Pathplanningalgorithm124
3.3.3Objectdetectionalgorithm135
3.4Conclusion 142 References 143
4.Identificationofmaincontrolparametersfortrain unmanneddrivingsystems 153
4.1Commonmethodsfordrivingcontrolofmaincontrol parameteridentification 153
4.1.1Systemidentification153
4.1.2Commonmethodsofparameteridentification159
4.2Trainunmanneddrivingdynamicmodels 169
4.2.1Forceanalysisoftrain170
4.2.2Dynamicmodeloftrain176
4.3Identificationmethodsoftrainintelligenttraction 178
4.3.1Fuzzyidentificationmethod178
4.3.2Simulatedannealingalgorithm182
4.3.3Artificialneuralnetwork184
4.3.4Geneticalgorithm189
4.3.5Swarmintelligencealgorithm193 4.4Conclusion 204 References 205
5.Dataminingandprocessingfortrainunmanned drivingsystems 211
5.1Dataminingandprocessingofmanualdrivingmodes 211
5.1.1Datatypesofmanualdrivingmodes213
5.1.2Traditionaldataminingandprocessingtechnology ofmanualdriving214
5.1.3Dataminingandprocessingtechnologyofmanual drivingbasedonthecombinationofofflineandonline220
5.1.4Dataminingandprocessingtechnologyofmanual drivingconsideringreal-timeschedulinginformation224
5.2Dataminingandprocessingofautomaticdrivingmodes 227
5.2.1Datatypesofautomaticdrivingmodes227
5.2.2Dataminingandprocessingtechnologyofautomatic drivingbasedondeeplearning228
5.2.3Dataminingandprocessingtechnologyofautomatic drivingbasedonadaptivedifferentialevolution algorithm231
5.3Dataminingandprocessingofunmanneddrivingmodes 233
5.3.1Datatypesofunmanneddrivingmodes233
5.3.2Thefunctionofdataminingtechnologyinunmanned drivingmodes233
5.3.3Dataminingandprocessingtechnologyofunmanned drivingmodes236
5.3.4Comparisonandanalysis248
5.4Conclusion 249 References 249
6.Energysavingoptimizationandcontrolfortrain unmanneddrivingsystems 253
6.1Technicalstatusoftrainunmanneddrivingenergy consumptionanalysis 253
6.1.1Analysisoftrainoperationenergyconsumption254
6.1.2Commontrainenergy-savingstrategies255
6.1.3Thedevelopmentandresearchstatusofenergy savingoptimizationfortrainoperation260
6.1.4Significanceofoptimizationfortrainoperation268
6.1.5Energyconsumptionmodelofdriverlesstrain operation269
6.2Single-targettrainenergysavingandmanipulation basedonartificialintelligencealgorithmoptimization 271
6.2.1Optimizationofenergy-savingoperationofdriverless trainbasedonparticleswarmoptimization271
6.2.2Optimizationofenergy-savingoperationofdriverless trainbasedonthegeneticalgorithm278
6.3Multiobjectivetrainenergysavingandcontrolbased ongroupartificialintelligence 282
6.3.1Optimizationofenergy-savingoperationofdriverless trainbasedonthemulti-populationgeneticalgorithm282
6.3.2Optimizationoftheenergysavingoperationofthe driverlesstrainbasedontheMOPSO287
6.4Conclusion 291 References 292
7.Unmanneddrivingintelligentalgorithmsimulation platform 297
7.1IntroductionofMATLAB/SimulinkSimulationPlatform 297
7.1.1Background297
7.1.2Historyoftrainsimulationsoftware298
7.1.3MATLAB301
7.1.4Simulink303
7.2Designmethodoftrainintelligentdrivingalgorithm simulationplatform 305
7.2.1Object-orientedsimulationtechnology305
7.2.2Thedevelopmentprocessofsimulationplatform software306
7.2.3Descriptionofthesoftwarearchitecture306
7.2.4Thestructuredesignofsimulationplatformsoftware309
7.3Trainautomaticoperationcontrolmodelandprogramming 310
7.3.1Inputmodule310
7.3.2Controllermodule311
7.3.3Trainmodelmodule312
7.3.4Outputmodule313
7.3.5Basicresistancemodule313
7.3.6Othermajormodules314
7.4Trainintelligentdrivingalgorithmsimulationgraphicaluser interfacedesignstandard 314
7.4.1Simulationlineselectionmodule315
7.4.2Simulationmodelparametersettingmodule316
7.4.3Algorithmselectionmodule317
7.4.4Simulationoptionmodule317
7.4.5Displaymoduleofsimulationresults318
7.5Applicationsandcaseanalysisofmainstreamtrain unmanneddrivingsystems 319
7.5.1Principleofsimulationsystem319
7.5.2Designoftheautomatictrainoperationalgorithm320
7.5.3Trainsimulationplatformsoftwaretesting329
7.5.4Evaluationandanalysisofsimulationsystem330
7.6Conclusion 332 References 334 Index343
Listoffigures
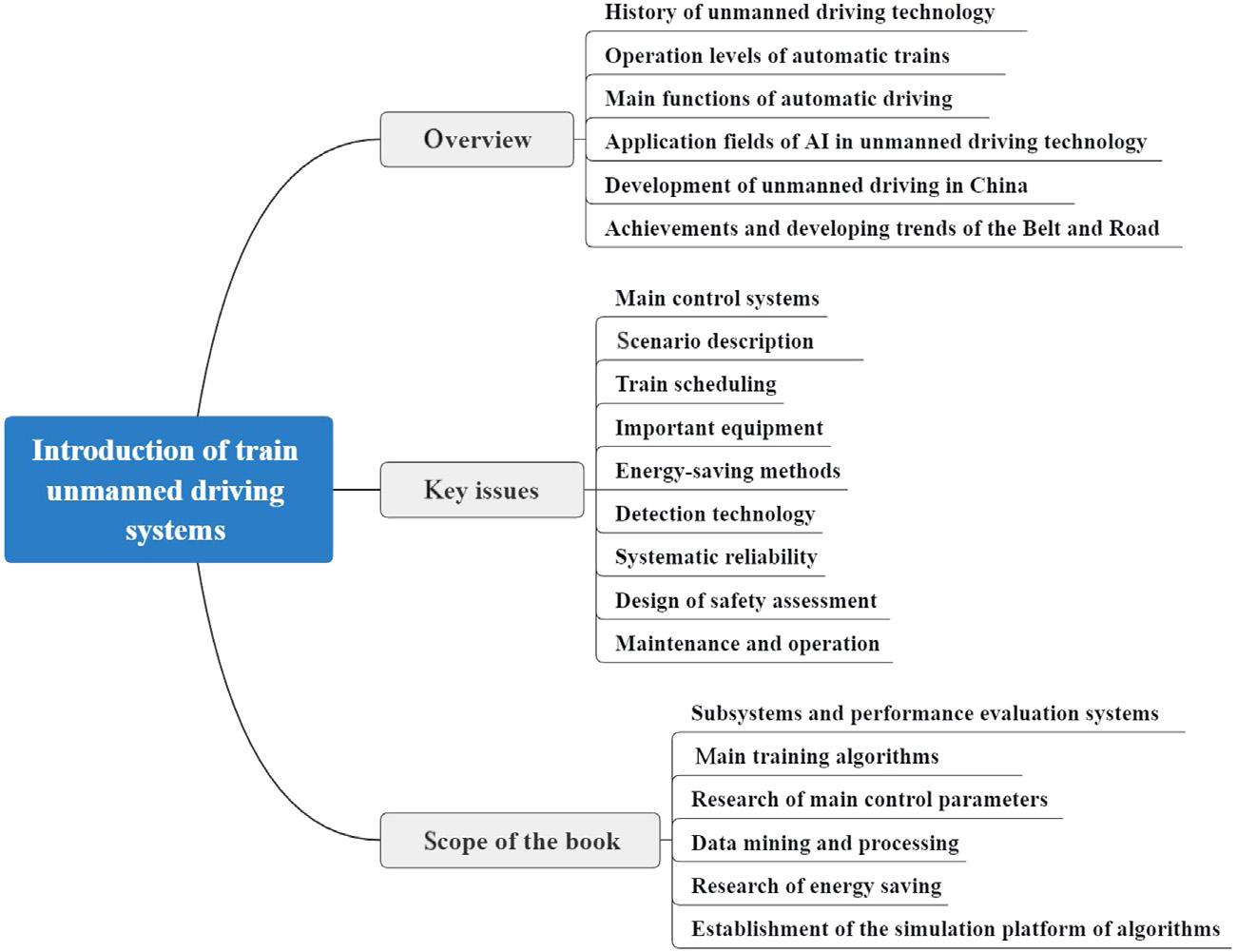
Figure1.1Theoverallstructureofthischapter.3
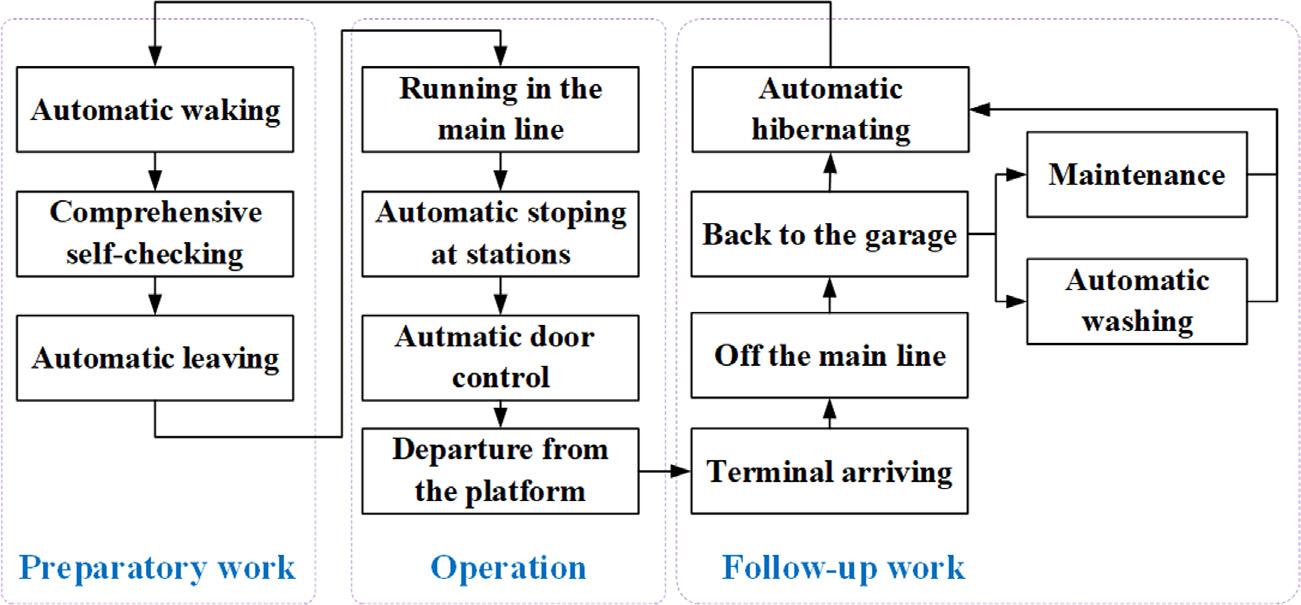
Figure1.2TheprocessofautomatictrainoperationatGoA4.8
Figure1.3ProportionofvariousinvestmentprojectsintheBeltandRoad Initiative. 19
Figure1.4Thesignalsystemofanunmanneddrivingsystem.24
Figure1.5Theoverallstructureofanunmannedsystem.28
Figure1.6Thefailureself-handlingprinciple.31
Figure2.1ThestructureofonboardequipmentfortheCTCS2+ATOsystem.79
Figure2.2TheperformanceindicesoftheATCsystem.79
Figure2.3HierarchicalstructureoftheATOsystem.93
Figure3.1Internationalstandardsdefinefourautomationlevels(Gradesof Automation)accordingtothedegreeofautomationofrailtransit lines.
103
Figure3.2Schematicdiagramoftrainunmanneddrivingalgorithms.105
Figure3.3Abriefsummaryofnonevolutionaryandevolutionarypathplanning algorithms. 113
Figure3.4Themodelingprocessoftheantcolonyalgorithm.128
Figure3.5Themodelingprocessofintelligentdropalgorithm.130
Figure4.1Thebasicstepsofidentification.156
Figure4.2Theoutputerrorsystem.165
Figure4.3Theoutputerrorsystemwithauxiliarymodel.166
Figure4.4Theframeworkofthemultiparticlemodel.177
Figure4.5Theradialbasisfunctionneuralnetworkmodel.187
Figure4.6Thestructureofsystemidentificationbasedonneuralnetwork.(A) Parallelstructure(B)Series-parallelstructure. 188
Figure5.1Dataminingandprocessingformanualdriving,automaticdriving, andunmanneddrivingmode. 213
Figure5.2Datatypesofmanualdrivingmodes.214
Figure5.3Calculationprocessingofmanualdrivingmode.217
Figure5.4Optimizationmodelofmanualdrivingteststrategybasedonthe geneticalgorithm. 223
Figure5.5Manualdrivingmodeconsideringreal-timeschedulinginformation.227
Figure5.6Overviewofdataminingtechnology.238
Figure6.1Schematicdiagramofenergyconsumptiondistributionintherail transitsystem. 254
Figure6.2Schematicdiagramofenergy-savingcontrolformulti-train collaborativeoptimization. 257
Figure6.3Optimalallocationdistributionofenergysavingoperationin unmannedtraindrivingsystem.
260
Figure6.4SchematicdiagramoftheevolutionprocessoftheMPGA.284
Figure7.1Therelationshipbetweencomputersimulationsoftware,simulation system,andmodel.
302
Listoffigures
Figure7.2TheSimulinktoolbox.304
Figure7.3Theinputmodel.311
Figure7.4Thecontrollermodule.312
Figure7.5Thetrainmodelmodule.312
Figure7.6Theoutputmodelmodule.313
Figure7.7Thebasicresistancemodel.314
Figure7.8ThegraphicaluserinterfaceoftheATO.316
Figure7.9Thevaluesoffitnessduringtheiterationsofallinvolvedmethods.331
Figure7.10Thesimulationresultsofallinvolvedmethods.331
Listoftables
Table1.1AutomationgradingbyIEC62267:2009.7
Table1.2GeneralrequirementsforSILofcoreproductsinunmannedsystems.34
Table3.1Summaryofadvantagesanddisadvantagesofvarioustraditionalpath planningmethods. 127
Table3.2Asummaryoftheperformancecomparisonforintelligentoptimization algorithms.
131
Table3.3Thenetworkarchitectureofdarknet-19.141
Table6.1Comparisonofsingle-trainandmulti-trainenergysavingoptimization strategies.
267
Preface
Withdevelopmentovertime,railtransithasplayedanincreasinglyimportantroleinthefieldofmasstransportationworldwide.Forshort-distance passengers,railtransitissafe,punctual,comfortable,andenvironmentfriendly.Withthecontinuousdevelopmentoftherailtransitindustry,the demandforrailtransportalsogrows.Theurgentneedsofgovernmentsand societieshavealsoputforwardhigherrequirementsforthesafety,efficiency, andoperatingcostsofrailtransit.Inordertoenhancetransportationsafety guaranteecapabilities,improvethequalityoftransportationservices,and improvetransportationefficiency,theintelligentizationofrailtransitisone ofthecoresofthedevelopmentoftherailtransitindustrynowandinthe future.
Unmannedrailwayvehiclesareanimportantmanifestationandcorerepresentativeoftheintelligentleveloftherailtransportationindustry.Itisthe basicmodeofoperationoffuturerailvehicles.Infact,inthefieldofrail transitresearchershaveaccumulateddecadesofresearch,design,andapplicationexperiencetowardunmannedrailtrainsystems.Atthesametime,a numberofunmannedrailwaylineshavebeenputintooperationorwillsoon beopenedworldwide.Comparedwithroadtraffic,railtransithasthecharacteristicsofrelativelyfixedlines,relativelyfixedstations,andgoodtimecontrollability.Thereforerailtransitismoresuitableforadriverlesssystem. Thecoreofunmannedrailtrainsisahighlyautomatedadvancedrailtrain controlsystem.Intheactualapplicationenvironment,thetraincontrolcenter usesthistypeofsystemtoimplementandmonitorinterstationconnections, signalsystems,trainoperations,vehiclescheduling,andsoforth,ofthe entirerailtransitnetwork.Therailtraincanthusfullyrealizeunmannedand fullyautomatedoperations.
Theunmannedrailwayvehiclesysteminvolvesknowledgeinmultiple fieldssuchascomputers,artificialintelligence,automation,anddataanalysis.Thespecificimplementationofthesystemisamultidisciplinaryand verycomplexsystematicproject.Thisbookdetailsthedevelopmentprocess, systemcomposition,andkeytechnologiesoftheunmannedrailwayvehicle system.Forprofessionalsandresearchersinintelligentmanufacturingand railtransportation,thisbookcanprovidesomehelptotherelatedresearchof unmannedrailwayvehicle.
Thisbookcontainssevenchapters:
Chapter1:Introductionoftrainunmanneddrivingsystem
Thischapterreviewsthedevelopinghistoryoftheunmanneddrivingsystemoftheurbanrailwaytransportandbrieflyintroducestheapplicationof artificialintelligenceintheunmanneddrivingsystem.
Chapter2:Trainunmanneddrivingsystemanditscomprehensiveperformanceevaluationsystem
Thischapterintroducesthetrainunmanneddrivingsystemwhichisalso calledtheautomatictraincontrol(ATC)system.Itfirstexploresthedevelopment,structure,andapplicationoftheATCsystem.Last,itintroducesthe comprehensiveperformanceevaluationsystemforthreedifferent subsystems.
Chapter3:Trainunmanneddrivingalgorithmbasedonreasoningand learningstrategy
Thischapterintroducesthetrainunmanneddrivingalgorithmsbasedon thereasoningandlearningstrategy.Tocomprehensivelyevaluatethe unmannedtrainalgorithm,thepositioningandnavigationphase,pathplanningphase,andobjectdetectionphasearedescribed.
Chapter4:Identificationofmaincontrolparametersfortrainunmanned drivingsystem
Thischapterintroducesthetheoryofsystemidentification,whilesome commonidentificationmethodsfortraindrivingcontrolmodelareintroduced.Accordingtotheforceanalysisofthetrain,thesingle-particle dynamicmodelandmultiparticledynamicmodeloftraindrivingcontrols areestablished.
Chapter5:Dataminingandprocessingfortrainunmanneddriving system
Thischapterintroducesthethreedrivingmodelsoftrainmanualdriving, automaticdriving,andunmanneddriving,andintroducescommonlyused dataminingandprocessingtechnologies.
Chapter6:Energysavingoptimizationandcontrolfortrainunmanned drivingsystem
Thischapterfirstdescribesthecurrentsituationofenergyconsumptionin arailtransitsystem.Thenitsummarizestheprincipleanddevelopmentstatusofthreemaintrainenergy-savingoptimizationmethods.Onthisbasis, twosingle-objective,energy-savingoptimizationmethodsarepresented.
Chapter7:Unmanneddrivingintelligentalgorithmsimulationplatform
Thischaptermainlyusestheskillsofsoftwarejointsimulationtodesign thetraincontrolplatform.Relevantalgorithmsofautomatictraindriving controlsystemareusedtoverifytheplatform.
HuiLiu Changsha,China
March2020
Acknowledgments
ThestudiesforthisbookweresupportedbytheNationalNaturalScience FoundationofChina,theNationalkeyR&DProgramofChina,andthe relatedprogramsofCentralSouthUniversity,China.Intheprocessofwritingthebook,HuipengShi,ZhihaoLong,GuangxiYan,ChengqingYu,Rui Yang,YuXia,ZeyuLiu,andotherteammembershavedonealotofmodel verificationandfurtherwork.Theauthorsexpresstheirheartfeltappreciation toallinvolved.
AbbreviationList
ABC Artificialbeecolony
AC Alternatingcurrent
ACO Antcolonyoptimization
AGT Automatedguidedtransit
AHP Analytichierarchyprocess
AI Artificialintelligence
AIIB AsianInfrastructureInvestmentBank
AM-RLS Auxiliarymodel-basedrecursiveleastsquare
AM-SG Auxiliarymodel-basedstochasticgradient
APM Automatedpeoplemover
ART Advancedrapidtransit
ATC Automatictraincontrol
ATO Automatictrainoperation
ATP Automatictrainprotection
ATS Automatictrainsupervision
B&R BeltandRoad
BA Batalgorithm
BHA Blackholealgorithm
BIRCH Balancediterativereducingandclusteringusinghierarchies
BP Backpropagation
BPNN Back-propagationneuralnetworks
BTM Balisetransmissionmodule
CBTC Communicationbasedtraincontrolsystem
CCTV Closedcircuittelevision
CI Computerinterlocking
CLARA Clusteringlargeapplications
CNN Convolutionalneuralnetwork
CRRC ChinaRailwayRollingStockCorporation
CSO Catswarmoptimization
CTCS ChineseTrainControlSystem
CURE ClusteringUsingRepresentatives
D-ATP Digital-automatictrainprotection
DBSCAN Density-basedspatialclusteringofapplicationswithnoise
DC Directcurrent
DCS Digitalcommandsystem
DCU Doorcontrolunit
DENCLUE Densityclustering
DMU Dieselmultipleunit
AbbreviationList
DR Deadreckoning
DSU Databasestorageunit
DTO Driverlesstrainoperation
EC Evolutionarycomputation
ECTS Europeantraincontrolsystem
ELM Extremelearningmachine
EMU Electricmultipleunits
EP Evolutionaryprogramming
ERTMS EuropeanRailTransportManagementSystem
ES Evolutionarystrategy
ESB Emergencystopbutton
FA Fireflyalgorithm
FastRCNN Fastregion-basedconvolutionalneuralnetwork
FIR Finiteimpulsiveresponse
GA Geneticalgorithm
GNSS GlobalNavigationSatelliteSystem
GOA Gradesofautomation
GP Geneticprogramming
GPRS Generalpacketradioservice
GPS Globalpositioningsystem
GUI Graphicaluserinterface
ICA Imperialcompetitionalgorithm
ICP Iterativeclosestpoint
IEC InternationalElectrotechnicalCommission
IMU Inertialmeasurementunit
IN Inertialnavigation
INS Inertialnavigationsystem
ISCS IntegratedSupervisoryControlSystem
ISO InternationalOrganizationforStandardization
IWD Intelligentwaterdrops
KM K-means
KNN K-nearestneighbor
LMS Leastmeansquare
LS Leastsquares
LSTM Long-shorttermmemory
LTE Longtermevolution
LZB Linienzugbeinflussung
MA Movementauthority
MIRLS Multi-innovationrecursiveleastsquare
MLR Multiplelinearregression
MMI Man machineinterface
MSE Meansquareerror
NGTC Nextgenerationtraincontrol
NMS Nonmaximumsuppression
NTO Nonautomatedtrainoperation
OCC Operatingcontrolcenter
OE Outputerror
OET Outputerrortype
OptGrid Optimalgrid-clustering
OPTICS Orderingpointstoidentifytheclusteringstructure
PAM Partitioningaroundmedoid
PCA Principalcomponentanalysis
pid Proportionalintegralderivative
PSO Particleswarmoptimization
PTU Portableterminalunit
PWM Pulsewidthmodulation
RBF Radialbasisfunction
RCNN Region-basedConvolutionalNeuralNetwork
RF Randomforest
R-FCN Region-based,FullyConvolutionalNetworks
RFID Radiofrequencyidentification
RL Reinforcementlearning
RLS Recursiveleastsquare
RNN Recursiveneuralnetwork
ROCK Robustclusteringusinglinks
RRT Rapidlyexploringrandomtree
RTTP Real-timetrafficplan
RTU Remoteterminalunit
SCADA Supervisorycontrolanddataacquisition
SDU Speedanddistanceunit
SG Stochasticgradient
SIL Safetyintegritylevel
SPP-net Spatialpyramidpoolingnetwork
SS Selectivesearch
SSD Singleshotmultiboxdetector
STC Stationcontroller
STING Statisticalinformationgrid-basedmethod
STO Semiautomatictrainoperation
SVM Supportvectormachine
TA Tentaclealgorithm
TCC Traincontrolcenter
TCMS Traincontrolandmanagementsystem
TOS Trainoperationsonsight
TSP Travelingsalesmanproblem
TVM Transmissionvoice-machine
UITP InternationalUnionofPublicTransport
UML Unifiedmodelinglanguage
UTO Unattendedtrainoperation
VAL Ve ´ hiculeautomatiquele ´ ger
VOBC Vehicleon-boardcontroller
WoLF-PHC Winorlearnfast policyhillclimbing
YOLO Youonlylookonce
ZC Zonecontroller
ZELC ZhuzhouLocomotiveCo.,Ltd. AbbreviationList
Chapter1
Introductionofthetrain unmanneddrivingsystem
1.1Overviewofthetrainunmanneddrivingsystem
Atpresent,therailtransitindustryisinthedevelopingprocessofworldwide networkoperations.Railtransitisbecomingmoreimportantinurbanconstructionanddevelopment.Thegovernmentandsocietyhavealsoputforwardmorerequirementsforsafety,efficiency,andcostsofrailtransit.
Thereforerailwaysystemtechnologyalsopresentsanewdevelopment situation.Torealizethenetworkdevelopmentandstructureofurbanrail transit,theoperationandautomationlevelofthedomesticurbanrailtransit systemshouldbefurtherimproved [1],anditalsoneedstoeffectivelyconnectwiththeinternationaladvancedurbanrailtransitsystem,providing goodservicesforthedevelopmentoftheurbantransportationindustry [2]
However,therealityisthattheequipmentleveloftheoldrailwaylinesis inadequate.Althoughthenewrailwaylineshaveimprovedtheircontrol levels,thelevelsofsystemintegrationandintelligencearestillinsufficient. Alargeamountofmanualparticipationisstillrequiredduringoperation.So thereisstillspaceforfurtherimprovement.Fromaglobalperspective, unmanneddrivingsystemshavebeenadoptedtoimprovesafetyandefficiencyandreduceoperationandmaintenancecosts,whetheritisforthenew linesortherenewalofoldlines.
Inthepasttenyearsorso,thedevelopmentofrailwaysinChinahas beenacceleratedsignificantly,especiallyinbigcitieslikeBeijing,Shanghai, Guangzhou,andShenzhen,andtheywillgraduallyformanurbanrailway network,whichcouldeffectivelysolvetheurgentneedsforurbanpublic transport [3,4].Withthedevelopmentofthescienceandtechnologyofautomation,theoperatingmodeofurbanrailtransitsystemsworldwidehasalso changed.Injustdecades,itsdevelopmenthasalreadygonethroughthree stages:
● Manualdrivingmode
Inthismode,thedriverofthetrainoperatesthetrainwithanindependent signalsystemusinganoperationchart,andobtainsover-speedmonitoring andprotectionfromanautomatictrainprotection(ATP)system.
●
Automaticoperationmodeofmanualdriving
Inthismode,trainsalsoneeddrivers,forwhomthemainoperationtasks aretoopenandclosethedoorsforpassengersandtogivecontrolsignalsto turnthetrainson.Theacceleration,decelerating,braking,andstoppingof thetrainsareautomaticallycompletedwithcoordinationandcooperation throughanautomatictraincontrol(ATC)systemandtheinterfaceofthe controlsystem.Mostofthenewlinesbuiltinpastfewyearshavetheequipmentnecessarytooperateintheautomaticoperationmodewithmanual driving.
● Fullyautonomousdrivingmode
Inautonomousdrivingmode,allthephasesofthetrains,includingthe waking,starting,running,stopping,openingandclosingofdoors,malfunctionanddegradedoperationaswellasenteringandexitingtheparkinglot, andfullyautomatedtrainwashing,donotrequiremanualoperation.
Thecurrentscientific andtechnologicalprogressiscarryingtherevolutionofrailtransittechnologyforw ard.Duringthetraveloftrains,continuouslyupdatedinformationofthe wholetrainandareal-timetraffic plan(RTTP)areessentialforthedrive radvisorysystemandfortraintrafficcontrol [5] .Newdesignconceptsandtechnologies,includingthe applicationofcomputatio nalnetworkcontrol,thereliabilityofintegrated circuits,electronicandelectromech anicalcomponents,theinnovationof manufacturing,andtheapplica tionof5Gtechnologyhavegreatly increasedthereliabilityandsafetyofr ailtransitsystems.Moreover,the increaseintheautomationlevelha sledtolessmanualinterventionand hasgraduallyreachedthelevelthatthefunctionsoftraindriversare completelyreplacedbyautomatic systems.Theurbanrailautomatic unmannedsystemhasbettersystema ticperformanceandflexibilityas wellasalowerenergyconsumptionthanmanualdriving.Atpresent,the fullyautomatedunmannedmanagemen tsystemisstillintheexploration phase.However,inthefuture,itisho pefulthattheintegrationofautomaticunmannedtechnologywill beappliedinrailwaysystems [6] .As partofurbanrailtransitintranspor tationprojects,researchinautonomoustechnologyisaimedatsolvingtheproblemofthehugepassenger flowinmajorcities.Currently,auton omousdrivingtechnologyhasbeen developedworldwide,andtheentirep rocessofautomaticcontrol,operationmaintenance,andmanagementhasbeenintegrated.Unmannedrail trainsadoptahighlyautomatedadv ancedrailtraincontrolsystem. Atrackcontrolcentermonitorstheint er-stationconnections,signalsystems,trainoperations,andvehicles chedulingoftheentirelinenetwork, soastoautomaticallyrunthetrains.
Thisbookisaimedattheresearchofrailwayunmanneddrivingtechnology andintroduces,indetail,thehistoryandmainresearchdirectionsofunmanned
FIGURE1.1 Theoverallstructureofthischapter.
drivingtechnology,thedevelopmentbackground,andtheapplicationofsubsystemsofautonomousdriving.Avariety ofdataminingandoptimizationalgorithmsusedintheprocessofautonomousdrivingareproposedtooptimizethe energyconservationandcontrolprocess.What’smore,basedonthetheoryand simulationplatform,intelligentsimulationresearchofautonomousdrivinghas alsobeencarriedout.Theoverallstructureofthischapterisshownin Fig.1.1
1.1.1Historyofunmanneddrivingtechnology
In1963,adrivingtestofanautonomousdrivingtrainbetweenstationswasconductedinLondon.Afterasuccessfulsafety test,afull-scaleautonomousdriving testbeganin1964.Manualdrivingtrainswereonthesamerailline,andtheautomaticdrivingsystemalsousedtheexistingfixedblockingsignalsystem.Afterall unmanneddrivingtrainswereproventooperatesafely,theVictoriaLine, London’sfirstfullyautomatedmetroline,beganitsoperationsinNovember 1968 [7,8].
Theworld’sfirstautomaticpassengersubwaysystemwasknowntostartin theUnitedStates.TheNewYorkTimesSquaretoCentralStationferrylinewas consideredtobethefirstautomaticsubwaylinetocarrypassengers.Theproject wasstartedin1959andtherelevanttestswerestartedonanisolatedlineatthe beginningof1960.Thereconstructionoffacilitiessuchasplatformswasstarted
in1961tosupportautomatedoperation,andpassenger-freecommissioningand trialoperationwerecarriedoutinlate1961.Passengeroperationsofficiallystarted inJanuary1962.Thecircuitadoptedaring-shapeddesign,includingautomatic platformdeparture,intervalautomaticspeedregulation,automaticplatformstop, andautomaticdoorcontrol,torealizethe automationofthetrain’smainlineoperationprocess [9].Fromatechnicalperspective,thislinewasfullyequippedwithouttheneedforattendantstogetonthetrain,butduetotheinfluenceof traditionalconceptsandthelaborunion,andforthecomfortofpassengers,there werestillcrewmembersonthetrain.Themainmethodadoptedbyautonomous drivingtechnologyduringthisperiodwastoindicatethespeedlimitofthetrain bysendingpulsesofdifferentfrequenciestotherails.Besides,point-command generatorsarearrangedatspeciallocations;forexample,ageneratorisarranged atthebestplacebetweentwostations,whichgeneratesanaudiosignalindication of15kc/s.Thetrainsshouldbeunloadedoridle.Whenatrainentersaplatform, itwillpassaseriesofthesepoint-typecommandgeneratorstorealizethestopping ofthetrainontheplatform.
InGermany,thefirstunmanneddrivingtestwasconductedinBerlinin 1928.NeartheKrummLankestation,anunmannedsystemwassuperimposed ontheexistingsignalblockingsystem.Thegoalwastointerferewiththeoperationofthetrainalongonitsentirerouteinsteadofitsoperationonlyatthe signal.Furthertestsweredonebetween1958and1959inanattempttocontrol thetrainspeedsusingLZB(Linienzugbeeinflussung,inGerman),butinsufficientprogresswasmade.Greatersuccesswasachievedinthe1960s.Night testsbetweentheSpichernStreetandZoologicalGardensstationsonlineU9 beganin1965,andthesystemwasworkingwellby1967.In1969,thetrains begantocarrypassengers.InMay1976,theentireU9linewasupgradedto autonomousdrivingoperations,butitstartedonlyinthetroughperiod.The full-timeautonomousdrivingoperationservicestartedin1977,anditwasrectifiedduetotheagingofthesystemin1993,15yearslater,andwasabandoned in1998.Fromthe1960stothe1970s,theHamburgMetro(U-Bahn)testwas conductedunderagovernmentplan.FromOctober1982toJanuary1985,an automaticpassengercarryingservicewascarriedoutonthe10kmline. Moreover,theRUBIN(automaticU-Bahn)projectinNurembergwasthefirst successfulrealizationofthefirstGermanautomaticunmannedU-Bahn.The U3lineincludestwosuburbanbranchlines,whichopenedinJune2008.After that,theU2linewasupgradedbytrain-by-trainautomaticdriving,andin January2010,itachievedfullyautomaticdriving [10].
ItisspecialthatGermanyhasrelativelycompletedregulationsand industry-standardsystemsatthenationalandindustriallevelsintermsof fullyautomaticdriving.Forexample,Germanyhasaregulationthattrains shouldnotstopinatunnelwhenanemergencyalertisactivatedorifany otherhazardsuchasafireisdetected,butshouldproceedtothenextstation asthiswillfacilitaterescue.Toincreasethesafetyandreducethedangerof passengersasmuchaspossible,thedesignofunmannedtrainsshould
considertheimprovementofsafetyinseveralaspects,including(1)theabilityofpassengerstocommunicatewiththecontrolcenter,(2)camerasshould beconnectedtothestationcentersothatworkerscanmonitortheconditions onthetraininreal-timewithoutinterruption,(3)trainsshouldusefireresistantmaterials,includingfire-resistantcables,and(4)multipletemperatureandsmokedetectorsshouldbesetinthepassengerareaandthemachine spaceunderthefloorfortheearlydetectionoffire.
Francealsocarriedoutanautomaticdrivingtestofpassengersubway trainsinParisfrom1952to1956.Afterthetestingofmultipletrainsinthe 1960s [11],thetraditionalsubwaywasupgradedtoanautomaticdrivingsubwaysystembetween1972and1979.Therewerestillpeopleresponsiblefor traindoorcontrolandplatformdepartures.OnApril25,1983,thefirstfully automaticlightrailsubwaysysteminFrance,LilleLine1,wasopenedwith theVAL(Ve ´ hiculeautomatiquele ´ ger,inFrench)system.VALisnowconsideredtobesynonymouswithautomatedlightrailvehicles,namelyautomated light(weight)vehicles.VALvehiclesare26mlongand2mwide.Theycan carry152passengerspertwounitsandrunwithrubberwheels.TheadvantagesofVALvehiclesaretheirlowconstructioncostsandshortdeparture intervalfromplatformforupto60seconds.Inthisline,platformgatesare usedforthefirsttimetoisolaterailtravelareasfrompassengerstoensurepassengersafety,reducetheprobabilityofplatformintrusions,andgreatly improvesafetyandsystemreliability.Thisautonomousdrivingsystemisrelativelycompleteandhasanimpactonrailwayunmanneddrivingtechnology.
In1998,inParis,Franceopenedthefirstfullyautomaticunmannedsubway, Line14,withplatformdoorsandlargepanoramicglassatbothendsofthetrain forpassengerstohaveaview.Line14usestrainsprovidedbyAlstomanda trainguardsignalsystemfromSiemens.BecauseofthegreatsuccessofLine 14,in2005,theParisMetrodecidedto upgradetheextremelybusyLine1to automaticunmanneddriving.Theupgradeincludedsignalsystemsfrom SiemensandtraincarbodiesfromAlstom.FromNovember2011toDecember 2012,unmannedtrainswereusedandmixedwithmanualcontrolledtrains. AfterDecember15,2012,alltrainswereunmanneddrivingtrains,achieving 100%automation.LyonisanothercityinFrancewithanautomaticmetroline. Thetrainshavepanoramicwindows,allowingpassengerstoenjoythescenery outsidealongtheline.Thetraindoorshavesensorstodetectifclothes,bags,or otherthingsaretrapped,andaninfraredsystemdetectsobstaclesontheedgeof theplatformortrack.
Unmannedrailtrainsrepresentthehighestlevelofautomaticcontrol,and arethebasicmodeofoperationoffuturerailtrains.Domesticandforeignrail trainshaveaccumulateddecadesofresearch,design,andapplicationexperience inthedirectionofunmannedrailtrains,andtherearealreadymanyunmanned raillinesinoperationathomeandabroad.Comparedwithroadtransportation, railtransportationismoresuitablefordriverlessdrivingduetotherelatively fixedlines,relativelyfixedstations,andgoodtimecontrollability.
DevelopedcountriessuchasBritain,France,Germany,Denmark,and Australiahavebuiltunmannedrailtrainsbasedontheirconditionsandtechnology.Althoughtherearealreadydemonstratedcasesofunmannedrail trainsathomeandabroad,ingeneral,unmannedrailtrainsareonlyasmall partoftheentirerailtrainoperationindustry.Generally,manylonglines withmanystationsandmanylineswithcomplicatedcontrolmethodsand manysuddenchangesaremainlyinmanualdriving.Withtherapidinnovationofartificialintelligence(AI)anditsincreasingmaturityinthetransportationindustry,theapplicationofAIinrailtransportationrepresentsabetter wayforthedevelopmentofunmannedrailtransportationinthefuture.
1.1.2Theoperationlevelsofautomatictrains
FollowingthedefinitionoftheInternationalUnionofPublicTransport (UITP),railwaydrivingcontroltechnologycanbedividedintofourdifferent gradesofautomation(GoA),accordingtoIEC62267:2009 [12]:
Level0(GoA0):Trainoperationsonsight(TOS),manualoperationwithoutprotectionfromautomatictrainoperation(ATO).
Level1(GoA1):Nonautomatedtrainoperation(NTO),thedriveris responsibleforcontrollingthetrainanddealingwithemergencies.
Level2(GoA2):Semiautomatictrainoperation(STO),thetraincanautomaticallyrunandstop,butitstillneedsadrivertocontrolthedoorsand dealwithemergencies.Mostautomaticoperationsystemsintrainsbelong tothislevel.
Level3(GoA3):Driverlesstrainoperation(DTO),thetraincanautomaticallyrunandstop,butanassistantisneededtomonitorthewholeprocessortocontrolthedoorsanddepartfromplatforms.
Level4(GoA4):Unattendedtrainoperation(UTO),thetraincanautomaticallyrun,stop,switchdoors,andhandleemergencies,andthereis noassistantonthetrain.
BythedefinitionofIEC62290 [13,14],theDTOandUTOgradesbelong underfullyautomaticunmanneddriving.Normally,automaticequipmentis usedtoreplacethedriver’sself-drivingtrainstorunontheentireline. Besides,thewidelyusedcommunication-basedtraincontrol(CBTC)system couldbedefinedasSTOforATOdrivingunderthesupervisionofthe driver.
Inconclusion,traindrivingcontroltechnologyhaspassedthroughthe processfromNTOandSTOtoUTO.Accordingtothedefinitionofstandard specifications,therailwayATOmodeincludestwolevels,namelythethird level,DTO,andthefourthlevel,UTOasshownin Table1.1.
Comparedwithmanualdriving,allneworenhancedfunctionsof UTOareconcentratedonhowtoreplacedriverfunctionstoinnovateand developanewoperatingsystem.Itstillneedstohavecertaintechnical
TABLE1.1 AutomationgradingbyIEC62267:2009.
Basicfunctionsoftrain operation GoA0GoA1GoA2GoA3GoA4 TOSNTOSTODTOUTO
Guaranteeof trainsafety
Guaranteeof saferoute
Guaranteeof safeseparation
Guaranteeof safespeed
TraindrivingAcceleration andbraking control ûûüüü
Track supervision Avoid collisionswith obstacles ûûûüü Avoid collisionswith people ûûûüü
Supervision ofboarding operations
Controltrain doors ûûûû/üü
Avoidinjuries topersons betweentrains orbetween platformsand trains ûûûû/üü
Ensuresafe starting conditions ûûûû/üü
Train operation Putinortake outoperation
Monitortrain status
Detection and management of emergencies
Performtrain diagnostics, detectfire/ smoke,detect derailment, handle emergency situations
/OCC
characteristics,namelyhighautomation,self-diagnosisandprocessingof faults,highlyredundantdesign,andpowerfulperceptionanddetection [15].
Allfunctionsmustbeautomaticallycompletedbythesystem,whichisthe basicrequirementofUTOtechnology.Trainswillautomaticallywakeupand self-checkbeforegoingoutofthegaragebythereceiveddailyoperationschedule,andthenenterastateofpreparation.Accordingtothestationplanandthe real-timesituationoftheline,tractionbrakinginstructionisautomatically given,thestopofstationsisautomaticallyconductedwhenthedoorsare openedandclosed,andthepassengerwillautomaticallyreturnwhentheterminalisreached [16].Afterfinishingtheoperationtaskfortheday,trainsgoto bewashedorreturntothegarageforinspection,anduploadthevehicledata forthedayaccordingtotheplanoroperatingcontrolcenter(OCC)instructions. TheprocessofautomatictrainoperationatGoA4isshownin Fig.1.2.
GoA4requiresnodriverandnoonboardassistant.Ifafailureoccursand itcannotbehandledintime,itwillharmnormaloperationsandevenhinder thesmoothflowoftheentireline.Thereforeitmusthavestrongfaultcapabilitiesofself-diagnosisandhandling.UTOtrainscollectdiagnosticinformationanddatafromvarioussubsystemsthroughatraincontroland managementsystem(TCMS),evaluatetheacceptedfaults,dividedifferent faultlevels,andtransmitthefaultstothedataprocessingcentertodetermine whethertointerveneorchooseaninterventionmethod.
TheUTOmodeneedstoreducetheimpactofemergencyhandlingof unmannedtrainsthroughredundantdesign.Themaincontrolcircuits,such astractionauthorization,brakingcontrol,andothercircuits,multibranchparallel,heterogeneoussignals,andothermethods,areappliedforredundancy. Thedetectionoftheloopistoavoidunknownfaultproblemscausedbyloss offunction.TheTCMSsystemhasaredundantconfigurationofinputand outputmodules.IfasingleI/Omoduleoranindividualsignalfails,thesystemcanachieverapidswitching.
FIGURE1.2 TheprocessofautomatictrainoperationatGoA4.
Traditionally,thedriveractsasaperceiverofexternalenvironmental informationandisinvolvedintraindrivingcontrol.TheUTOmodeissupportedbyvarioussensorsorcorrespondingsubsystems [15].UTOtrainsare equippedwithanobstacledetectionsystem,whichcandetectusingavariety ofmethodssuchaslaserscanning,infraredcameras,stereocameras,radar, andotherequipmenttointerveneintherunningstatusofatrainbasedonthe detectionresults [16].Alargenumberofcameraarrangementsactasthe detectionsystemforUTOtrains,andthesewirelesslytransmitinternaland externalimagesofthevehicletotheOCConthegroundviavehicle-togroundwirelesstransmission.UTOtrainsnotonlydetectsmokeinpassenger compartmentsandelectricalcabinets,butalsoarrangemeasuringpointsin importantoff-boardequipmentforreal-timemonitoringandcomprehensive warning [17].
ThedevelopmentofUTOtechnologywillshowatrendfromunmanned interventiontounmanneddriving,andthentointelligentandintegrated mode.MostcurrenturbanrailvehicleshavereachedGoA2,inwhichthe ATOinthesectionhasbeenrealized.ThedegreeofautomationofUTO technologyhasbeenfurtherimprovedandautomaticoperationcanbe achievedwithoutmanualinterventiononthemainline.Theimpactfactors suchashighpassengerflowtothedomesticsubway,shortdepartureintervals,andpassengerpsychology,whetherontheUTOlinethathasbeen openedorisabouttoopen,havereservedstaffonthetrain.Withthe increaseofoperationexperienceandfurtherimprovementoftechnology, GoA3modewithhumanvaluemultiplicationandnomanualintervention willinevitablymovetowardthefullyunmannedGoA4mode.
1.1.3Themainfunctionsanddevelopmentofunmanneddriving trains
Automatictrainshavefunctionssuchasautomaticwake-up,garagedeparture,departure,travel,stop,return,andautomaticreturntothegarage,automaticwashing,andautomaticdormancyafteroperation.Fullyautomatic systemsaredesignedtomaketrainsrunmorereliablyandachieveautomatic controloftheentiresceneandprocess.ComparedwiththeATOmode,in whichtheoperatinglineshavebeenopenedinthepast,thedegreeofautomationismuchhigherinUTOmode,inwhichthereliability,applicability, maintenance,andsecuritycanbequantified [15].
Thecontrolcenterofunmanneddrivingtrainscandirectlyconnectwith thetrainsandpassengers,servepassengers,andguidepassengerstohandle emergencymatters.Mostoftheworkdonebytraincontrolisautomatically completedbyacomputer,andthedispatcher’sresponsibilitiesincluderoutinemonitoringandnecessaryinterventionandconfirmation [18].The degradedoperationmodeandtrainrescuemodeofunmanneddrivingsystemsaremuchmorecomplicatedthanthoseoftraditionalmanualdriving