Advanced Health Assessment of Women, Third Edition: Clinical Skills and Procedures (Advanced Health Assessment of Women: Clinical Skills and Pro) – Ebook PDF Version
Development Editor: Joanna Collett/Veronika Watkins
Project Manager: Andrew Riley
Designer: Paula Catalano
Illustrator Manager: Amy Faith Heyden
The Comprehensive Textbook of Clinical Biomechanics
Second Edition
JIM RICHARDS BEng, MSc, PhD
Professor of Biomechanics
Lead for the Allied Health Research Unit
University of Central Lancashire
Preston, UK
EDITOR
JIM RICHARDS BEng, MSc, PhD
Jim Richards was appointed Professor in Biomechanics and research lead for Allied Health Professions at University of Central Lancashire in 2004. Professor Richards’ work includes the clinical application of biomechanics, the development of new assessment tools for chronic disease, conservative and surgical management of orthopaedic and neurological conditions, and development of evidence based approaches for improving clinical management and rehabilitation. The focus of Professor Richards work is to encourage inter-professional research and to develop direct parallels with research to the ‘real world’ of allied health work. Professor Richards holds a number of
International Professorial Chair positions and is an associate editor for “The Knee” and on the editorial board for “Gait and Posture”. Professor Richards has authored over 130 peer reviewed journal papers, over 170 conference papers and written and edited a number of textbooks including Biomechanics in Clinic and Research (2008) and the 5th edition of Whittle’s Gait Analysis (2012). He has also contributed to Tidy’s Physiotherapy (2003, 2008, 2012), the 10th edition of Mercer’s Textbook of Orthopaedics and Trauma (2012), Experimental Research Methods: A Guidebook for Studies in Trauma Care (2015) and Patellofemoral Pain: A Clinical Guide (2017).
Professor of Clinical Biomechanics in the School of Life Sciences and Education at Staffordshire University, UK
PAOLA CONTESSA BSC(ENG), MSC(ENG), PHD
Research Scientist at Boston University, Research Scientist at Delsys Inc., USA
CARLO J DE LUCA, PHD
was Professor of Biomedical Engineering, Founder and Director of the NeuroMuscular Research Center, Research Professor of Neurology, Professor of Electrical and Computer Engineering, Professor of Physical Therapy and Founding President of Delsys Inc. In 2015 he was appointed Professor Emeritus of Boston University College of Engineering, USA
AOIFE HEALY BSC, MSC, PHD
Senior Research Officer in the School of Life Sciences and Education at Staffordshire University, UK
SARAH JANE HOBBS BENG(HONS), PHD
Reader in Equine and Human Biomechanics and research lead for Centre for Applied Sport and Exercise Sciences at University of Central Lancashire, UK
DAVID LEVINE, PT, PHD, DPT, OCS
Professor and Walter M. Cline Chair of Excellence in Physical Therapy at The University of Tennessee at Chattanooga, USA
RICARDO MATIAS PT, PHD
Researcher at the Neurobiology of Action Group, Champalimaud Foundation and Neuromechanics of Human Movement Research Group, University of Lisbon, Portugal
ROBERT NEEDHAM BSC, MSC, FHEA
Lecturer in Biomechanics in the School of Life Sciences and Education at Staffordshire University, UK
SERGE ROY SCD, PT
Director of Research, Delsys Inc, Natick, MA; and Adjunct Research Professor at Sargent College of Health and Rehabilitation Sciences at Boston University, USA
JIM RICHARDS BENG, MSC, PHD
Professor in Biomechanics and research lead for Allied Health Professions at University of Central Lancashire, UK
JAMES SELFE DSC, PHD, MA, GDPHYS, FCSP Professor of Physiotherapy in the Department of Health Professions at Manchester Metropolitan University, UK
JONATHAN SINCLAIR BSC (HONS), PHD
Senior Lecturer and Course Leader for MSc Sport & Exercise Sciences, Sport, Exercise & Nutritional Sciences at University of Central Lancashire, UK
ACKNOWLEDGEMENTS
I owe an enormous debt of gratitude to all my colleagues and students past and present. Particularly I wish to thank my contributors for their tireless work and contributions.
I would also like to take this opportunity to say farewell to my friend and mentor Professor Carlo John De Luca who passed away on July 20, 2016 at the age
of 72. Carlo has been an inspiration to me and to countless others. Throughout his life he challenged the status quo which led to significant breakthroughs on the frontiers of neuromuscular control, signal processing and EMG sensor technology. This is an example to us all. Carlo you have left an unrivalled legacy in your field, you will be missed.
INTRODUCTION
Over the years many clinicians have commented about the increase in the need for what is described as Evidence Based Practice or Evidenced Based Medicine. The users’ guides to evidence-based medicine (Journal of the American Medical Association, 1992) states that;
■ The understanding of basic mechanisms of disease are not sufficient guides for clinical practice alone.
■ Systematically recorded observations and reproducible measurements are needed to study the effectiveness of clinical practice.
Two of the challenges in clinical practice are, the reproducibility of measurements of effectiveness and the clinical relevance of the measures made. Two questions that have become commonplace in clinical research in the last few years are:
■ What are Minimal Clinical Important Differences (MCIDs)? These can be defined as smallest measureable differences between the patient and a defined “normal”.
■ What are Minimal Clinically Important Changes (MCICs)? These can be defined as the smallest change in score in the domain of interest due to a treatment which patients perceive as beneficial.
So the questions that need to be asked of biomechanics are:
■ Can biomechanics offer new and sensitive measures of assessment?
■ Can biomechanics assess the effectiveness of different treatments?
■ Can biomechanics offer immediate, informed and direct feedback to clinical practice?
This book covers the concepts and theory necessary to understand the nature of biomechanical measurements, and the methods available to collect, analyse, and interpret biomechanical data in a clinically meaningful way. This includes: the mathematical and mechanical concepts necessary for the understanding of the musculoskeletal system and the interpretation of biomechanical measurements, the variety of methods available for biomechanical measurement, and the biomechanics of conservative management of musculoskeletal and neurological pathologies. This book also covers the biomechanics of prosthetics and orthoses and the biomechanics of common movement tasks used in clinical assessment. This therefore should allow undergraduate and postgraduate allied health professionals to advance their biomechanical knowledge and understanding in a way relevant to both training and clinical practice.
A substantial interactive virtual learning environment and teaching resource runs parallel with this book. The virtual learning environment contains lessons relating to the material covered in the paper text book. This also includes many interactive questions to help the learner determine the level of their understanding as they proceed. This virtual learning environment “course” is highly illustrated and contains animations which describe the mathematical and mechanical concepts needed to understand biomechanics. These animations demonstrate the theory covered, and allow the user to control animations of the various clinical case studies included in the text. This aims to provide a stream of online information on biomechanics in a modular format for teaching and learning, and builds understanding and application of biomechanics at a steady pace. This structured approach is designed to act as a companion to
undergraduate and postgraduate courses featuring clinical biomechanics.
BOOK STRUCTURE
This book is divided into three sections: Section 1 Mechanics and Biomechanics Theory, Section 2 Methods of Measurement and modelling and Section 3 Clinical Assessment. This structure also allows the lecturer to plan their teaching in relation to specific learning outcomes, and aims to help both lesson delivery and the development of structured courses.
Section 1 Mechanics and Biomechanics Theory
Chapter 1: Maths and Mechanics
Chapter 1 covers the basic mathematics and mechanics needed to understand the much more complicated problem of the mechanics of the human body. This chapter shows how problems may be broken down into separate parts. The techniques covered in the chapter aim to make the more advanced biomechanical problems covered later much easier to solve.
Chapter 2: Forces, Moments and Muscles
Chapter 2 considers the use of mathematics and mechanics techniques in relation to the musculoskeletal system in more detail. Using these techniques and the study of the properties of the body segments, the joint moments, muscle forces, and joint reaction forces in upper limb and lower limb are also considered.
Chapter 3: Ground Reaction Forces and Plantar Pressure
Chapter 3 considers the use of ground reaction forces and the various measures that may be drawn from them. This covers ground reaction forces during postural sway, walking and different running styles and the methods of measuring Impacts, Impulse and Momentum. In addition, this chapter considers foot pressure measurements.
Chapter 4: Motion and Joint Motion
Chapter 4 covers the basic methods of gait assessment through to the description and discussion of the involvement of the three-dimensional movement of the foot, ankle, knee, hip and pelvis and some
more advanced methods of analysing the function of walking.
Chapter 5: Work and Power During Human Movement
Chapter 5 covers the concepts of linear and angular work energy and power and how these can be determined from force data, and demonstrates the concept of how angular work and power can be used to analyse the action of joints and muscles during walking and running. In addition the method of calculating the energies involved in the movement of body segments is also considered.
Chapter
6: Inverse Dynamics Theory
Chapter 6 covers the concept of inverse dynamics. This is an important link between the more basic biomechanical models considered so far and includes examples of how we can consider and calculate dynamic joint moments and forces and considers the consequences of not considering dynamic forces.
Section
2 Methods of Measurement and Modelling
Chapter 7: Measurement of Force and Pressure
Chapter 7 covers the measurement of Force and Pressure. This includes the different methods of assessing force and pressure and the identification of a variety of measurements that are commonly used in research and clinical assessment.
Chapter 8: Methods of Analysis of Movement
Chapter 8 covers strengths and weaknesses of different methods of movement analysis from the use of camera technology through to inertial measurement units. This includes the processes required to collect and analyse movement data and the consideration of possible errors.
Chapter 9: Anatomical Models and Marker Sets
Chapter 9 covers different marker sets that can be used in movement analysis. This includes both modelling of the foot, lower limb, spine and shoulder joint. The nature of six degrees of freedom measurement is considered and the associated errors encountered when considering different models and coordinate systems.
frontal plane: Frame of reference for the body –viewed from the front
g: Acceleration due to gravity
gait: The manner of walking
gait analysis: The study of locomotion of humans and animals
gait initiation: To start walking
GCS: Global coordinate system
global frame of reference: A set of orthogonal axes, one of which is parallel with the field of gravity
goniometer: a simple hand-held device for measuring joint angles
GRF or ground reaction force: The reaction force as a result of the body hitting or resting on the ground
gyroscopes: electro-mechanical devices which measure angular velocity
habituation: Becoming accustomed hemiplegia: Paralysis of one side of the body
hs: Height of the centre of mass above the datum
IMU: inertial measurement unit
impulse force: Area under a force-time curve
instantaneous power: Power at a particular moment in time
Is: Moment of inertia about the proximal joint
Isometric: Where the joint angle and muscle length do not change during contraction
Isotonic contraction: Where the tension in the muscle remains constant despite a change in muscle length
JCS: Joint coordinate system
KAFO: Knee Ankle Foot Orthosis
KAM: Knee Adduction Moment
kinematics: The study of the motion of the body without regard to the forces acting to produce the motion
kinetic energy: The energy associated with motion, both angular and linear
kinetics: The study of the forces that produce, stop, or modify motions of the body
ks: Radius of gyration of body segment
LCS: local coordinate system
linear displacement: Distance moved in a particular direction
linear velocity: Speed at which an object is moving in a particular direction
loading response: Period immediately following the initial contact of the foot
markers: small reflective balls that are used to track movement
mid stance: The period from the lift of the contralateral foot from the ground to a position in which the body is directly over the stance foot
mid swing: This is the period of swing phase immediately following maximum knee flexion to the time when the tibia is in a vertical position
Monopodal: Standing on one leg
moment of inertia: The rotational inertial properties of an object
motion or movement analysis: A technique of recording and studying movement patterns of animals and objects
motoneuron: neurons that originate in the spinal cord
motor unit (MU): functional unit of muscles comprising of a single motoneuron and all the fibers innervated by the motoneuron.
motor unit action potential (MUAP): response of all single muscle fibre action potentials belonging to one motor unit
ms: Segment mass
non-collinear: Points that do not lie in a straight line
obliquity: Pelvic movement when viewed in the coronal plane
OKC: Open Kinetic Chain
PAR: Passive Angle Reproduction
pascals: Units of pressure
pedotti diagram: Ground Reaction Force vector diagram
plantarflexion: The downward bending of the foot or toes
posterior: The back of the body or a part placed in the back of the body
1 MATHS AND MECHANICS
JIM RICHARDS
This chapter covers the key terminology, basic mathematics and mechanics needed to understand the much more complicated problem of the mechanics of the human body. It illustrates how problems may be broken down into separate parts and shows the techniques used for the more advanced biomechanical problems covered later.
AIM
To consider and describe the maths and mechanics necessary to build and understand more complex biomechanical concepts.
OBJECTIVES
■ To describe key terms used when describing the body
■ To describe how vectors can be resolved
■ To explain how Newton’s laws relate to the human body and the difference between mass and weight
■ To explain how the action of force vectors on joints can be explored
■ To explain frictional forces under the foot
■ To explain what is meant by a turning moment.
1.1 KEY TERMINOLOGY
1.1.1 Units – System International
The system of units we use for measurement is the Système International (SI), which was devised in 1960. It defined a system of units to be used universally. The system of measurement units was based on the MKS (metre, kilogram, second) system. These and only these units should be used when working out problems, do not use pounds and feet! If you do not use SI
units in your calculations then problems become a lot harder to solve, and you don’t want that, do you?
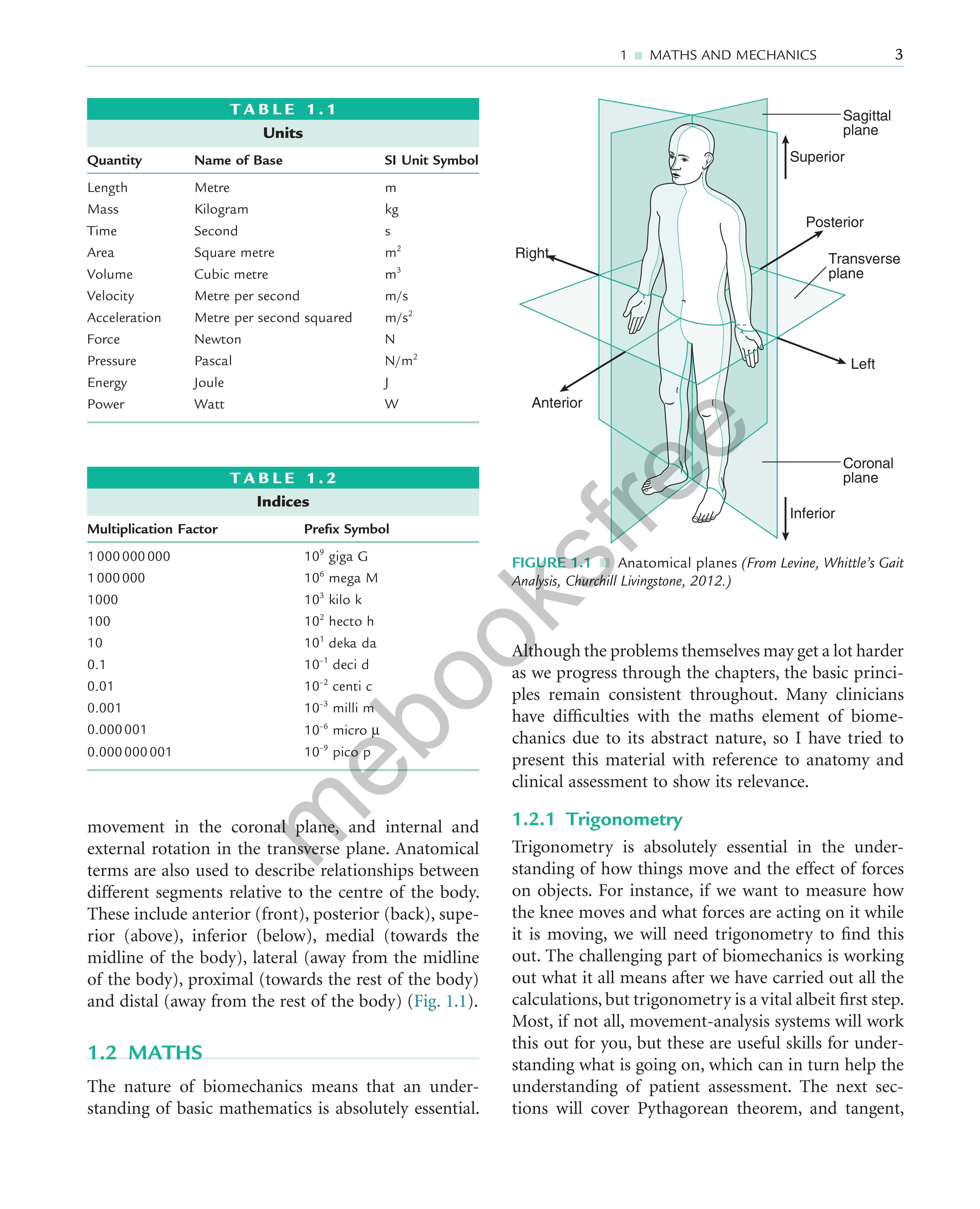
Some of the common SI units that are used in biomechanics are given later. Many of these units have a close relationship with one another, which aims to make problems easier to solve ( Table 1.1).
1.1.2
Indices
Indices are a way of expressing very large or very small numbers without including lots of zeros ( Table 1.2). For example, 100 000 m may be written as 100 km, and a pressure of 10 000 000 pascals may be written as 10 MPa. This can be very useful in biomechanics, in particular for pressure measurement when the values can be very large.
1.1.3 Introduction to Anatomical Terms
The motion of the limbs is described using 3 perpendicular planes: sagittal, coronal and transverse. The sagittal plane can be described as a view from the side, the coronal (sometimes called the frontal) plane is a view either from the front or the back and the transverse plane is a view from above or along the long axis of a body segment. Therefore, flexion and extension is described as movement in the sagittal plane (or dorsiflexion and plantarflexion when considering the ankle), abduction and adduction is described as
Cubic metre
Metre per second m/s Acceleration Metre per second squared m/s 2
Newton N Pressure Pascal N/m 2
Joule
10 9 giga G
10 6 mega M
1 03 kilo k
1 0 2 hecto h
1 0 1 deka da 10- 1 deci d
1 0- 2 Centi C
1 0- 3 milli m
0.000 001
0.000 000 001
movement in the coronal plane, and internal and external rotation in the transverse plane. Anatomical terms are also used to describe relationships between different segments relative to the centre of the body. These include anterior (front), posterior (back), superior (above), inferior (below), medial (towards the midline of the body), lateral (away from the midline of the body), proximal (towards the rest of the body) and distal (away from the rest of the body) ( Fig. 1.1 ).
1.2 MATHS
The nature of biomechanics means that an understanding of basic mathematics is absolutely essential.
Although the problems themselves may get a lot harder as we progress through the chapters, the basic principles remain consistent throughout. Many clinicians have difficulties with the maths element of biomechanics due to its abstract nature, so I have tried to present this material with reference to anatomy and clinical assessment to show its relevance.
1.2.1 Trigonometry
Trigonometry is absolutely essential in the understanding of how things move and the effect of forces on objects. For instance, if we want to measure how the knee moves and what forces are acting on it while it is moving, we will need trigonometry to find this out. The challenging part of biomechanics is working out what it all means after we have carried out all the calculations, but trigonometry is a vital albeit first step. Most, if not all, movement-analysis systems will work this out for you, but these are useful skills for understanding what is going on, which can in turn help the understanding of patient assessment. The next sections will cover Pythagorean theorem, and tangent,
sine and cosine, by considering the positions and orientations of body segments.
Pythagorean
Theorem
Pythagoras was alive from approximately 570 to 495 BC. It was Pythagoras who first discovered that in a right-angled triangle, the square of the hypotenuse is equal to the sum of the squares of the other two sides. This only works for right-angled triangles (where one of the internal angles is 90°).
Interestingly, for the majority of problems in biomechanics, this simple property of right-angled triangles is all we need to consider joint movements and forces. This is mostly due to the way in which we divide up the body into three planes. These three body planes are at 90° to one another (or orthogonal, if we wish to use the scientific term). The useful thing from the mathematical point of view is that, whichever anatomical plane we are looking at, we will have a 90° angle present. This is good news, because triangle problems with a 90° angle are a lot easier to solve: mind you everything is relative!
So hopefully you are now convinced that triangles are important for biomechanics. We will now look at Pythagorean theorem and consider the position and angle of the femur. To start we need to know the positions of the distal and proximal ends of the femur. These are often identified by the femoral condyles (A) at the knee and the head of the femur at the hip (C) (Fig. 1.2).
Pythagorean theorem states that the square of the hypotenuse is equal to the sum of the squares of the other two sides. The hypotenuse is the longest side in any right-angled triangle, where the remaining two sides make up the 90° angle. Thus:
ACAB BC 22 2 =+
where AB is the horizontal distance between the knee and hip joints, BC is the vertical distance between the knee and hip joints, and AC is the hypotenuse or length of the femur.
Movement analysis systems will often tell us the position of the ends of a body segment in x and y coordinates. If we consider that we know the lengths of the horizontal and vertical sides, AB = 20 cm and BC = 50 cm, we can use Pythagorean theorem to find the length of the femur or AC.
ACAB BC 22 2 =+
AC 2220502=+
AC 2 4002500=+
AC 2 2900 =
AC cm ==29005385 .
Therefore, the length of the femur is 53.85 cm.
It is very important to note that the length of the femur, or hypotenuse, is the longest side of the triangle. This will always be the case: if you work out the hypotenuse to be shorter than either of the other two sides, then you have probably got a little mixed up with the equation.
So, if we know any two sides of a right-angled triangle, the third side can be found. Or, to consider the femur, if we know the horizontal and vertical positions of the knee and hip joints, we can work out the length of the femur. Although for most people this is not terribly exciting, without this we would know little about mechanics, and even less about biomechanics.
What Are Tangent, Sine and Cosine?
The best way of thinking about tangent (tan), sine and cosine is as ratios of the different sides of a triangle. In
FIGURE 1.2 ■ Pythagorean theorem
A Summary of Sine, Cosine and Tangent
A quick summary of the ratios of the sides of rightangled triangles and a possible memory aid is the word SOHCAHTOA:
Sin Opposite Hypotenuse θ=
Cos Adjacent Hypotenuse θ=
Tan Opposite Adjacent θ=
With this information if we know the length of one side and one angle of a right-angled triangle, we can find the length of all the other sides and their angles. Within biomechanics it is possible to use only right-angled triangles. With the previously mentioned tools it is possible to solve almost all the trigonometry necessary in biomechanics.
1.2.2 Vectors
What Is a Vector
Vectors have both magnitude (i.e. size) and direction. All vectors can be described in terms of components in the vertical and horizontal directions, or described by a resultant effect acting at a particular angle (Fig. 1.5).
One vector that we will be considering throughout this book is that of the force on the foot from the ground, or ‘ground reaction force’, which we will consider in much more detail later. Fig. 1.5 shows the horizontal and vertical components of this force and the overall effect, the resultant, of these components. Other examples of vectors include displacement, velocity and acceleration. Vectors may be worked out in exactly the same way as shown in Section 1.1.1 with right-angled triangles, the only difference being the terminology.
The Resultant
This is the combination effect of all the vectors. In the previous example the resultant is the overall force acting from the ground. This in essence is just a hypotenuse and can be found using Pythagoras’ theorem, or with sine, cosine and tangent depending on what information is provided.
The
Component
The components of the resultant act at 90° from one another; these are equivalent to the opposite and
component
1.5 ■ Vector diagram
adjacent sides of a right-angled triangle. These components act along a coordinate system or frame of reference, which in this case is vertical and horizontal to the ground. So, if we always consider the horizontal and vertical ‘effects’ we will always create a right-angled triangle.
Adding and Subtracting Vectors
In practical biomechanical problems, the segments or limbs which are analysed will usually be subjected to a number of forces acting in various directions. Often,
Resultant
Vertical component
Horizontal
FIGURE
we will wish to ‘add’ these forces together to determine their overall effect. The simplest example is where the vectors are acting along the chosen frame of reference. Fig. 1.5 shows the different forces acting and the resultant effect.
If all the vectors involved act along the same line they can be added algebraically. That is, forces acting in one direction are regarded as positive, whilst those acting in the opposite direction are regarded as negative—how we define what is positive and what is negative will be covered later. The example in the following sections shows forces on the foot pushing left and right, and up and down, with the overall effect (Fig. 1.6). Do not worry about the units N (newton) just yet!
Resolving
Vectors may act in many different directions as well as magnitudes; this is particularly true when we consider the forces in muscles acting around the joints of the body. When vectors do act in different directions, it is still possible to break these down and find the overall effect if we follow a set of steps no matter how complex the problem looks.
The key to successfully looking at complex systems of vectors is ‘resolving’. Resolving is the term used for finding the component vectors from a resultant vector or vice versa, which once again takes us back to rightangled triangles.
Guidelines for Solving Vector Problems
When considering vector problems, we need to first decide on a sensible frame of reference or coordinate system. Frames of reference may be:
1. the vertical and horizontal direction relative to the ground;
2. the planes of the human body, e.g. sagittal, coronal or transverse; or
3. along a body segment and at 90° to it.
To calculate and understand the overall effect of all the vectors we must relate each vector to the same sensible frame of reference. In other words, we are interested in finding the effects along and at 90° to the sensible frame of reference.
We often have problems where we have vectors acting at an angle to the chosen frame of reference. I sometimes refer to this as acting at a ‘funny angle’, i.e. the vector does not line up with the frame of reference. If this is the case the vector at the ‘funny angle’ can be ‘resolved’ along and at 90° to the sensible frame of reference, or, to put it another way, the vector at the funny angle, the hypotenuse, can be split into the opposite and adjacent sides of a right-angled triangle. The opposite and adjacent sides will be the component vectors acting in each of the directions of your reference system. Similarly, if we have the horizontal and vertical components (the opposite and adjacent sides) we can find the resultant (the hypotenuse) using Pythagoras’ theorem. Then use sine or cosine we can find the angle at which the resultant acts.
A Simple Vector Problem. This problem deals with the forces we have during push off when walking. At this point we will not concern ourselves with what this means or the nature of the units. The aspect we need to focus on is that we have a vector of magnitude 1000 N acting at an angle of 80°. The question that needs answering is this: what are the magnitudes of the