TactileSensing,Skill Learning,andRobotic Dexterous Manipulation
Editedby QiangLi
CenterforCognitiveInteractionTechnology,BielefeldUniversity Bielefeld,Germany
ShanLuo
DepartmentofComputerScience,UniversityofLiverpool Liverpool,UnitedKingdom
ZhaopengChen
FacultyofMathematics,InformaticsandNaturalScience DepartmentInformatics,UniversityofHamburg Hamburg,Germany
ChenguangYang
BristolRoboticsLab,UniversityoftheWestofEngland Bristol,UnitedKingdom
JianweiZhang
FacultyofMathematics,InformaticsandNaturalScience DepartmentInformatics,UniversityofHamburg Hamburg,Germany
AcademicPressisanimprintofElsevier 125LondonWall,LondonEC2Y5AS,UnitedKingdom 525BStreet,Suite1650,SanDiego,CA92101,UnitedStates 50HampshireStreet,5thFloor,Cambridge,MA02139,UnitedStates TheBoulevard,LangfordLane,Kidlington,OxfordOX51GB,UnitedKingdom
Copyright©2022ElsevierInc.Allrightsreserved.
MATLAB® isatrademarkofTheMathWorks,Inc.andisusedwithpermission. TheMathWorksdoesnotwarranttheaccuracyofthetextorexercisesinthisbook. Thisbook’suseordiscussionofMATLAB® softwareorrelatedproductsdoesnotconstitute endorsementorsponsorshipbyTheMathWorksofaparticularpedagogicalapproachor particularuseoftheMATLAB® software.
Nopartofthispublicationmaybereproducedortransmittedinanyformorbyanymeans, electronicormechanical,includingphotocopying,recording,oranyinformationstorageand retrievalsystem,withoutpermissioninwritingfromthepublisher.Detailsonhowtoseek permission,furtherinformationaboutthePublisher’spermissionspoliciesandourarrangements withorganizationssuchastheCopyrightClearanceCenterandtheCopyrightLicensingAgency, canbefoundatourwebsite: www.elsevier.com/permissions.
Thisbookandtheindividualcontributionscontainedinitareprotectedundercopyrightbythe Publisher(otherthanasmaybenotedherein).
Notices
Knowledgeandbestpracticeinthisfieldareconstantlychanging.Asnewresearchand experiencebroadenourunderstanding,changesinresearchmethods,professionalpractices,or medicaltreatmentmaybecomenecessary.
Practitionersandresearchersmustalwaysrelyontheirownexperienceandknowledgein evaluatingandusinganyinformation,methods,compounds,orexperimentsdescribedherein.In usingsuchinformationormethodstheyshouldbemindfuloftheirownsafetyandthesafetyof others,includingpartiesforwhomtheyhaveaprofessionalresponsibility.
Tothefullestextentofthelaw,neitherthePublishernortheauthors,contributors,oreditors, assumeanyliabilityforanyinjuryand/ordamagetopersonsorpropertyasamatterofproducts liability,negligenceorotherwise,orfromanyuseoroperationofanymethods,products, instructions,orideascontainedinthematerialherein.
ISBN:978-0-323-90445-2
ForinformationonallAcademicPresspublications visitourwebsiteat https://www.elsevier.com/books-and-journals
Publisher: MaraConner
AcquisitionsEditor: YuraR.Sonnini
EditorialProjectManager: EmilyThomson
ProductionProjectManager: PrasannaKalyanaraman
Designer: VictoriaPearson
TypesetbyVTeX
Tactilesensingandperception
1.GelTiptactilesensorfordexterousmanipulationin
DanielFernandesGomesandShanLuo 1.1Introduction
JiaqiJiangandShanLuo
2.6.1Visualguidancefortouchsensing33
2.6.2Guidedtactilecrackperception34
2.6.3Experimentalsetup36
2.6.4Experimentalresults37 2.7Conclusionanddiscussion
3.Multimodalperceptionfordexterousmanipulation
GuanqunCaoandShanLuo
3.1Introduction
3.2Visual-tactilecross-modalgeneration
3.2.2Experimentalresults48
3.3Spatiotemporalattentionmodelfortactiletextureperception
3.3.1Spatiotemporalattentionmodel51
3.3.2Spatialattention52
3.3.3Temporalattention52
3.3.4Experimentalresults54
3.3.5Attentiondistributionvisualization55 3.4Conclusionanddiscussion
4.Capacitivematerialdetectionwithmachinelearning forroboticgraspingapplications
HannesKisner,YitaoDing,andUlrikeThomas
4.2.1Capacitanceperception62
4.3.1Datapreparation68
4.3.2Classifierconfigurations70
5.Admittancecontrol:learningfromhumansthrough collaboratingwithhumans
NingWangandChenguangYang
5.1Introduction 83
5.2Learningfromhumanbasedonadmittancecontrol 85
5.2.1Learningataskusingdynamicmovementprimitives85
5.2.2Admittancecontrolmodel87
5.2.3Learningofcompliantmovementprofilesbasedon biomimeticcontrol87
5.3Experimentalvalidation 90
5.3.1Simulationtask90
5.3.2Handovertask92
5.3.3Sawingtask92
5.4Humanrobotcollaborationbasedonadmittancecontrol 93
5.4.1Principleofhumanarmimpedancemodel94
5.4.2Estimationofstiffnessmatrix95
5.4.3Stiffnessmappingbetweenhumanandrobotarm98
5.5Variableadmittancecontrolmodel 98
5.6Experiments 100
5.6.1Testofvariableadmittancecontrol100
5.6.2Human–robotcollaborativesawingtask102
5.7Conclusion 106 References 106
6.Sensorimotorcontrolfordexterousgrasping–inspirationfromhumanhand
KeLi
6.1Introductionofsensorimotorcontrolfordexterousgrasping 109
6.2Sensorimotorcontrolforgraspingkinematics 111
6.3Sensorimotorcontrolforgraspingkinetics 120
6.4Conclusions
7.Fromhumantorobotgrasping:forceandkinematic synergies
AbdeldjallilNaceri,NicolòBoccardo,LorenzoLombardi, AndreaMarinelli,DiegoHidalgo,SamiHaddadin, MatteoLaffranchi,andLorenzoDeMichieli
7.1Introduction 133
7.1.1Humanhandsynergies134
7.1.2Theimpactofthesynergiesapproachonrobotichands136
7.2Experimentalstudies 137
7.2.1Study1:forcesynergiescomparisonbetweenhumanand robothands137
7.2.2Resultsofforcesynergiesstudy139
7.2.3Study2:kinematicsynergiesinbothhumanandrobot hands139
7.2.4Resultsofkinematicsynergiesstudy142
7.3Discussion 144
7.3.1Forcesynergies:humanvs.robot144
7.3.2Kinematicsynergies:humanvs.robot145
7.4Conclusions
8.Learningform-closuregraspingwithattractiveregion inenvironment
RuiLi,ZhenshanBing,andQiQi
8.1Background 149
8.2Relatedwork 150
8.2.1Closureproperties150
8.2.2Environmentalconstraints151
8.2.3Learningtograsp151
8.3Learningaform-closuregraspwithattractiveregionin environment 152
8.3.1Attractiveregioninenvironmentforfour-pingrasping152
8.3.2LearningtoevaluategraspqualitywithARIE156
8.3.3LearningtograspwithARIE161
8.4Conclusion 166 References 167
9.Learninghierarchicalcontrolforrobustin-hand manipulation
TingguangLi
9.1Introduction 171
9.2Relatedwork 173
9.3Methodology 174
9.3.1Hierarchicalstructureforin-handmanipulation175
9.3.2Low-levelcontroller176
9.3.3Mid-levelcontroller177
9.4Experiments 178
9.4.1Trainingmid-levelpoliciesandbaseline179
9.4.2Dataset180
9.4.3Reachingdesiredobjectposes180
9.4.4Robustnessanalysis181
9.4.5Manipulatingacube182
9.5Conclusion 183
10.Learningindustrialassemblybyguided-DDPG
YongxiangFan
10.1Introduction 187
10.2Frommodel-freeRLtomodel-basedRL 189
10.2.1Guidedpolicysearch189
10.2.2Deepdeterministicpolicygradient190
10.2.3ComparisonofDDPGandGPS191
10.3Guideddeepdeterministicpolicygradient 192
10.4Simulationsandexperiments 194
10.4.1Parameterlists195
10.4.2Simulationresults195
10.4.3Experimentalresults198
10.5Chaptersummary 199 References 200
PartIII
Robotichandadaptivecontrol
11.ClinicalevaluationofHannes:measuringtheusability ofanovelpolyarticulatedprosthetichand MariannaSemprini,NicolòBoccardo,AndreaLince, SimoneTraverso,LorenzoLombardi,AntonioSucci, MicheleCanepa,ValentinaSqueri,JodyA.Saglia,PaoloAriano, LuigiReale,PericleRandi,SimonaCastellano, EmanueleGruppioni,MatteoLaffranchi,andLorenzoDeMichieli
11.1Introduction 205 11.2Preliminarystudy 206
11.2.1Datacollection207 11.2.2Outcomes207
11.3TheHannessystem 209
11.3.1Analysisofsurveystudyanddefinitionofrequirements209 11.3.2Systemarchitecture209
11.4PilotstudyforevaluatingtheHanneshand 212 11.4.1Materialsandmethods213 11.4.2Results215
11.5ValidationofcustomEMGsensors 218 11.5.1Materialsandmethods218 11.5.2Results220
11.6Discussionandconclusions 222 References 224
12.Ahand-armteleoperationsystemforrobotic dexterousmanipulation
ShuangLi,QiangLi,andJianweiZhang
12.1Introduction
12.2Problemformulation
12.3Vision-basedteleoperationfordexteroushand 230
12.3.1Transteleop230
12.3.2Pair-wiserobot–humanhanddatasetgeneration233
12.4Hand-armteleoperationsystem
12.5Transteleopevaluation
12.5.1Networkimplementationdetails237
12.5.2Transteleopevaluation238
12.5.3Handposeanalysis240
12.6Manipulationexperiments
13.Neuralnetwork-enhancedoptimalmotionplanning forrobotmanipulationunderremotecenterof motion
HangSuandChenguangYang
13.1Introduction
13.2Problemstatement
13.2.1Kinematicsmodeling250
13.2.2RCMconstraint251
13.3Controlsystemdesign
13.3.1Controllerdesignmethod255
13.3.2RBFNN-basedapproximation256
13.3.3Controlframework257 13.4Simulationresults
14.Towardsdexterousin-handmanipulationofunknown objects
QiangLi,RobertHaschke,andHelgeRitter 14.1Introduction
14.3Reactiveobjectmanipulationframework
14.3.1Localmanipulationcontroller–positionpart269
14.3.2Localmanipulationcontroller–forcepart270
14.3.3Localmanipulationcontroller–compositepart271 14.3.4Regraspplanner272
14.4Findingoptimalregrasppoints
14.4.1Graspstabilityandmanipulability273
14.4.2Objectsurfaceexplorationcontroller274
14.5Evaluationinphysics-basedsimulation 276
14.5.1Localobjectmanipulation277
14.5.2Large-scaleobjectmanipulation279
14.6Evaluationinarealrobotexperiment 284
14.6.1Unknownobjectsurfaceexplorationbyonefinger284
14.6.2Unknownobjectlocalmanipulationbytwofingers288
14.7Summaryandoutlook
15.Robustdexterousmanipulationandfingergaiting undervariousuncertainties
YongxiangFan
15.1Introduction 297
15.2Dual-stagemanipulationandgaitingframework 301
15.3Modelingofuncertainmanipulationdynamics 301
15.3.1State-spacedynamics301
15.3.2Combiningfeedbacklinearizationwithmodeling304
15.4Robustmanipulationcontrollerdesign 305
15.4.1Designscheme305
15.4.2Designofweightingfunctions307
15.4.3Manipulationcontrollerdesign308
15.5Real-timefingergaitsplanning 309
15.5.1Graspqualityanalysis309
15.5.2Position-levelfingergaitsplanning310
15.5.3Velocity-levelfingergaitsplanning311
15.5.4Similaritiesbetweenposition-levelandvelocity-level planners313
15.5.5Fingergaitingwithjumpcontrol314
15.6Simulationandexperimentstudies 315
15.6.1Simulationsetup315
15.6.2Experimentalsetup316
15.6.3Parameterlists317
15.6.4RMCsimulationresults318
15.6.5RMCexperimentresults323
15.6.6Fingergaitingsimulationresults325
15.7Chaptersummary 329 References 330
A.Keycomponentsofdexterousmanipulation:tactile sensing,skilllearning,andadaptivecontrol
QiangLi,ShanLuo,ZhaopengChen,ChenguangYang,and JianweiZhang
Contributors
PaoloAriano,CenterforSustainableFutureTechnologies,IstitutoItalianodi Tecnologia,Torino,Italy
ZhenshanBing,DepartmentofInformatics,TechnicalUniversityofMunich,Munich, Germany
NicolòBoccardo,RehabTechnologiesLab,IstitutoItalianodiTecnologia,Genova, Italy
MicheleCanepa,RehabTechnologiesLab,IstitutoItalianodiTecnologia,Genova, Italy
GuanqunCao,smARTLab,DepartmentofComputerScience,UniversityofLiverpool, Liverpool,UnitedKingdom
SimonaCastellano,CentroProtesiINAIL,VigorsodiBudrio(BO),Italy
ZhaopengChen,UniversityofHamburg,FacultyofMathematics,Informaticsand NaturalScience,DepartmentInformatics,GroupTAMS,Hamburg,Germany
LorenzoDeMichieli,RehabTechnologiesLab,IstitutoItalianodiTecnologia,Genova, Italy
YitaoDing,LabofRoboticsandHumanMachineInteraction,ChemnitzUniversityof Technology,Chemnitz,Germany
YongxiangFan,FANUCAdvancedResearchLaboratory,FANUCAmerica Corporation,UnionCity,CA,UnitedStates
DanielFernandesGomes,smARTLab,DepartmentofComputerScience,University ofLiverpool,Liverpool,UnitedKingdom
EmanueleGruppioni,CentroProtesiINAIL,VigorsodiBudrio(BO),Italy
SamiHaddadin,ChairofRoboticsandSystemsIntelligence,MunichInstituteof RoboticsandMachineIntelligence(MIRMI),TechnicalUniversityofMunich (TUM),Munich,Germany
CentreforTactileInternetwithHuman-in-the-Loop(CeTI),Dresden,Germany
RobertHaschke,CenterforCognitiveInteractionTechnology(CITEC),Bielefeld University,Bielefeld,Germany
DiegoHidalgo,ChairofRoboticsandSystemsIntelligence,MunichInstituteof RoboticsandMachineIntelligence(MIRMI),TechnicalUniversityofMunich (TUM),Munich,Germany CentreforTactileInternetwithHuman-in-the-Loop(CeTI),Dresden,Germany
JiaqiJiang,smARTLab,DepartmentofComputerScience,UniversityofLiverpool, Liverpool,UnitedKingdom
HannesKisner,LabofRoboticsandHumanMachineInteraction,ChemnitzUniversity ofTechnology,Chemnitz,Germany
MatteoLaffranchi,RehabTechnologiesLab,IstitutoItalianodiTecnologia,Genova, Italy
KeLi,InstituteofIntelligentMedicineResearchCenter,DepartmentofBiomedical Engineering,ShandongUniversity,Jinan,Shandong,China
QiangLi,UniversityofBielefeld,Bielefeld,Germany CenterforCognitiveInteractionTechnology(CITEC),BielefeldUniversity, Bielefeld,Germany
RuiLi,SchoolofAutomation,ChongqingUniversity,Chongqing,China
ShuangLi,UniversitätHamburg,Hamburg,Germany
TingguangLi,TencentRoboticsX,Shenzhen,China
AndreaLince,RehabTechnologiesLab,IstitutoItalianodiTecnologia,Genova,Italy
LorenzoLombardi,RehabTechnologiesLab,IstitutoItalianodiTecnologia,Genova, Italy
ShanLuo,smARTLab,DepartmentofComputerScience,UniversityofLiverpool, Liverpool,UnitedKingdom DepartmentofComputerScience,UniversityofLiverpool,Liverpool,United Kingdom
AndreaMarinelli,RehabTechnologiesLab,IstitutoItalianodiTecnologia,Genova, Italy
AbdeldjallilNaceri,ChairofRoboticsandSystemsIntelligence,MunichInstituteof RoboticsandMachineIntelligence(MIRMI),TechnicalUniversityofMunich (TUM),Munich,Germany
QiQi,SchoolofAutomation,ChongqingUniversity,Chongqing,China
PericleRandi,CentroProtesiINAIL,VigorsodiBudrio(BO),Italy
LuigiReale,Areasanitàesalute,ISTUDFoundation,Milano,Italy
HelgeRitter,CenterforCognitiveInteractionTechnology(CITEC),Bielefeld University,Bielefeld,Germany
JodyA.Saglia,RehabTechnologiesLab,IstitutoItalianodiTecnologia,Genova,Italy
MariannaSemprini,RehabTechnologiesLab,IstitutoItalianodiTecnologia,Genova, Italy
Contributors
ValentinaSqueri,RehabTechnologiesLab,IstitutoItalianodiTecnologia,Genova, Italy
HangSu,DipartimentodiElettronica,InformazioneeBioingegneria,Politecnicodi Milano,Milano,Italy
AntonioSucci,RehabTechnologiesLab,IstitutoItalianodiTecnologia,Genova,Italy
UlrikeThomas,LabofRoboticsandHumanMachineInteraction,Chemnitz UniversityofTechnology,Chemnitz,Germany
SimoneTraverso,RehabTechnologiesLab,IstitutoItalianodiTecnologia,Genova, Italy
NingWang,BristolRoboticsLaboratory,UniversityoftheWestofEngland,Bristol, UnitedKingdom
ChenguangYang,BristolRoboticsLaboratory,UniversityoftheWestofEngland, Bristol,UnitedKingdom
JianweiZhang,UniversitätHamburg,Hamburg,Germany UniversityofHamburg,FacultyofMathematics,InformaticsandNaturalScience, DepartmentInformatics,GroupTAMS,Hamburg,Germany
This page intentionally left blank
Preface
Dexterousmanipulationisaverychallengingresearchtopicanditiswidely requiredincountlessapplicationsintheindustrial,service,marine,space,and medicalrobotdomains.Therelevanttasksincludepick-and-placetasks,peg-inhole,advancedgrasping,in-handmanipulation,physicalhuman–robotinteraction,andevencomplexbimanualmanipulation.Sincethe1990s,mathematical manipulationtheories(AMathematicalIntroductiontoRoboticManipulation, R.M.Murray,Z.X.Li,andS.S.Sastry,1994)havebeendevelopedandwehave witnessedmanyimpressivesimulationsandrealdemonstrationsofdexterous manipulation.Mostofthemneedtoassume:
1. anaccurateobjectgeometrical/physicalmodelandaknownroboticarm/hand kinematic/dynamicmodel,
2. therobothasthedexterousmanipulationskillsforthegiventask.
Unfortunately,asthesetwostrongassumptionscanonlybefeasibleinatheoreticalmodel,physicssimulation,orwell-customizedstructuralenvironment, previousresearchworkisbiasedtowardsmotionplanningandimplementation. Becauseoftheinherentuncertaintyoftherealworld,simulationresultsarerelativelyfragileindeployinginrealapplicationsandpronetofailedmanipulationif theassumptionsdeviatefromtherealrobotandobjectmodel.Thedemonstrated experimentswillalsofailifthestructuralenvironmentischanged.Examples canbechangesinkinematic/dynamicmodelsduetowearandtear,imperfectly calibratedhand–eyeratios,andachangeinthemanipulatedobject.
Inordertodealwiththeuncertaintyfromdynamicinteractionandimplementation,itisnecessarytoexploitsensorsandthesensory-controlloopto improvetherobots’dexterouscapabilityandrobustness.Currently,thebestdevelopedsensorfeedbackinroboticsisvision.Vision-basedperceptionand controlhavelargelyimprovedtherobustnessofrobotsinrealapplications.One missingaspectforvision-poweredrobotsistheirapplicationinthecontextof contact.Thisabsenceismainlybecausevisionisnotthebestmodalitytomeasureandmonitorcontactbecauseofocclusionissuesandnoisymeasurements. Onthispoint,tactilesensingisacrucialcomplementarymodalitytoextract unknowncontact/objectinformationrequiredinmanipulationtheories.Itprovidesthemostpracticalanddirectinformationforobjectperceptionandaction decisions.
Apartfromsensorfeedback,anotherunresolvedissuefordexterousmanipulationishowtogeneratetherobot’smotion/forcetrajectory–skillsforthe tasks.Giventhediversityofthetasks,itisunpracticaltohardcodeallkinds ofmanipulationskillsforroboticarmsandhands.Inspiredbyimitation,one solutionistoextract,represent,andgeneralizetheseskillsfromhumandemonstration.Thentherobotsuseadaptivecontrollerstoimplementthelearnedskills ontheroboticarmandhand.Inrecentyearswehavealsoseenresearcherscombineskillrepresentationandtransferinonestep–exploringandlearningthe dexterouscontrollerautomatically.
Inthiseditedbook,weinvitedtheresearchersworkinginthreeresearch directions–tactilesensing,skilllearning,andadaptivecontrol–todrawa completepictureofdexterousroboticmanipulation.Allofthemhavetop-level publicationrecordsintheroboticsfield.Weareconfidentthatthecontributed chapterscanprovidebothscientistsandengineerswithanup-to-dateintroductiontothesedynamicanddevelopingdomainsandpresenttheadvancedsensors, perception,andcontrolalgorithmsthatwillinformtheimportantresearchdirectionsandhaveasignificantimpactonourfuturelives.Concretelythereaders cangainthefollowingknowledgefromthisbook:
1. tactilesensinganditsapplicationstothepropertyrecognitionandreconstructionofunknownobjects;
2. humangraspinganddexterousskillrepresentationandlearning;
3. theadaptivecontrolschemeanditslearningbyimitationandexploration;
4. concreteapplicationshowrobotscanimprovetheirdexteritybymodern tactilesensing,interactiveperception,learning,andadaptivecontrolapproaches.
Aseditors,webelievesynthesizingintelligenttactileperception,skilllearning,andadaptivecontrolisanessentialpathtoadvancingstate-of-the-artdexterousroboticmanipulation.Wehopethatreaderswillenjoyreadingthisbookand finditusefulfortheirresearchjourney.Wewouldliketothankallauthors,and wearegratefulforsupportfromtheDEXMANprojectfundedbytheDeutsche Forschungsgemeinschaft(DFG)andtheNaturalScienceFoundationofChina (NSFC)(Projectnumber:410916101),supportfromtheDFG/NSFCTransregio CollaborativeProjectTRR169“CrossmodalLearning,”andsupportfromEPSRCproject“ViTac:Visual-TactileSynergyforHandlingFlexibleMaterials” (EP/T033517/1).WealsoexpressourappreciationtoEmilyThomsonandSonniniRuizYurafromElsevierfortheirencouragementandcoordinationtomake thisbookpossible.
QiangLi ShanLuo ZhaopengChen ChenguangYang JianweiZhang Bielefeld
June2021
GelTiptactilesensorfor dexterousmanipulationin clutter
DanielFernandesGomesandShanLuo smARTLab,DepartmentofComputerScience,UniversityofLiverpool,Liverpool,UnitedKingdom
1.1Introduction
Ashumans,robotsneedtomakeuseoftactilesensingwhenperformingdexterousmanipulationtasksinclutteredenvironmentssuchasathomeandin warehouses.Insuchcases,thepositionsandshapesofobjectsareuncertain, anditisofcriticalimportancetosenseandadapttotheclutteredscene.With cameras,Lidars,andotherremotesensors,largeareascanbeassessedinstantly[1].However,measurementsobtainedusingsuchsensorsoftensuffer fromlargeuncertainties,occlusions,andvarianceoffactorslikelightconditions andshadows.Thankstothedirectinteractionwiththeobject,tactilesensingcan reducethemeasurementuncertaintiesofremotesensorsanditisnotaffected bythechangesoftheaforementionedsurroundingconditions.Furthermore, tactilesensinggainsinformationofthephysicalinteractionsbetweentheobjectsandtherobotend-effectorthatisoftennotaccessibleviaremotesensors, e.g.,incipientslip,collisions,anddetailedgeometryoftheobject.Asdexterous manipulationrequirespreciseinformationoftheinteractionswiththeobject, especiallyinmomentsofin-contactornear-contact,itisofcrucialimportance toattaintheseaccuratemeasurementsprovidedbytactilesensing.Forinstance, failingtoestimatethesizeofanobjectby1mm,oritssurfacefrictioncoefficient,during(andalsorightbefore)agraspmightresultinseverelydamaging thetactilesensorordroppingtheobject.Incontrast,failingtoestimatetheobjectshapebyafewcentimeterswillnotmakeabigimpactonthemanipulation. Tothisend,cameravisionandotherremotesensorscanbeusedtoproduce initialestimationsoftheobjectandplanmanipulationactions,whereastactile sensingcanbeusedtorefinesuchestimatesandfacilitatethein-handmanipulation[2,3].
Theusageoftactilesensorsformanipulationtaskshasbeenstudiedsince[4] andinthepastyearsawiderangeoftactilesensorsandworkingprincipleshave beenstudiedintheliterature[2,3,5],rangingfromflexibleelectronicskins[6], TactileSensing,SkillLearning,andRoboticDexterousManipulation https://doi.org/10.1016/B978-0-32-390445-2.00008-8 Copyright©2022ElsevierInc.Allrightsreserved. 3
fiberoptic-basedsensors[7],andcapacitivetactilesensors[8]tocamera-based opticaltactilesensors[9,10],manyofwhichhavebeenemployedtoaidrobotic grasping[11].Electronictactileskinsandflexiblecapacitivetactilesensorscan beadaptedtodifferentbodypartsoftherobotthathavevariouscurvaturesand geometryshapes.However,duetothenecessityofdielectricsforeachsensing element,theyproduceconsiderablylow-resolutiontactilereadings.Forexample,aWTStactilesensorfromWeissRoboticsusedin[12–14]has14 × 6taxels (tactilesensingelements).Incontrast,camera-basedopticaltactilesensorsprovidehigher-resolutiontactileimages.However,ontheotherside,theyusually haveabulkiershapeduetotherequirementofhostingthecameraandthegap betweenthecameraandthetactilemembrane.
Opticaltactilesensorscanbegroupedintwomaingroups:marker-based andimage-based,withtheformerbeingpioneeredbythe TacTip sensors[15] andthelatterbythe GelSight sensors[16].Asthenamesuggests,marker-based sensorsexploitthetrackingofmarkersprintedonasoftdomedmembraneto perceivethemembranedisplacementandtheresultingcontactforces.Bycontrast,image-basedsensorsdirectlyperceivetherawmembranewithavarietyof imagerecognitionmethodstorecognizetextures,localizecontacts,andreconstructthemembranedeformations,etc.Becauseofthedifferentworkingmechanisms,marker-basedsensorsmeasurethesurfaceonalowerresolutiongridof points,whereasimage-basedsensorsmakeuseofthefullresolutionprovided bythecamera.Some GelSight sensorshavealsobeenproducedwithmarkers printedonthesensingmembrane[17],enablingmarker-basedandimage-based methodstobeusedwiththesamesensor.Bothfamiliesofsensorshavebeen producedwitheitherflatsensingsurfacesordomed/finger-shapedsurfaces.
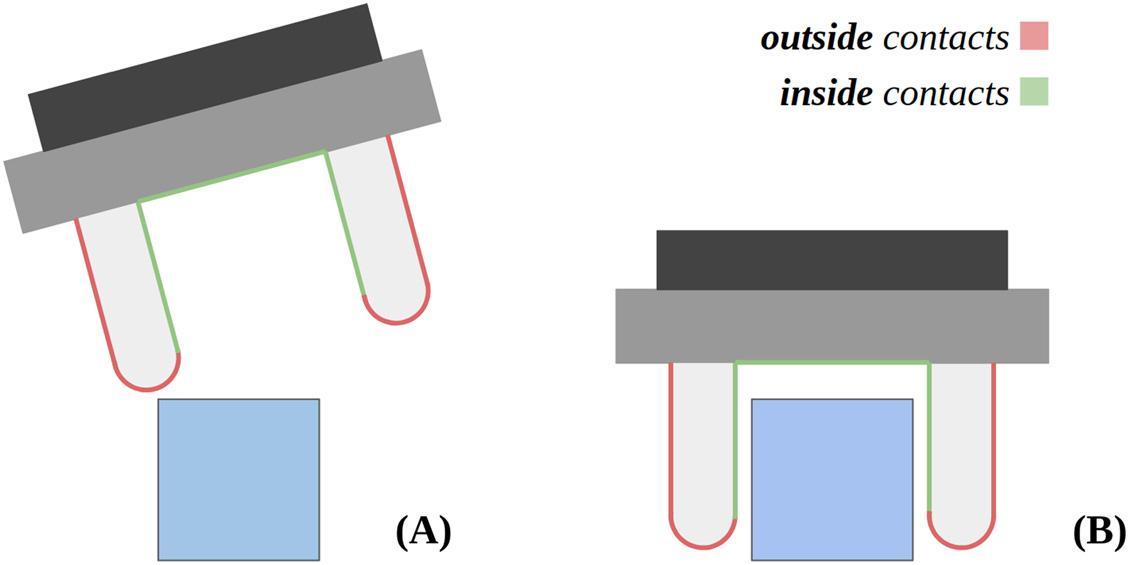
Inthischapter,wewillfirstreviewexistingopticaltactilesensorsinSection 1.2,andthenwewilllookindetailintooneexampleofsuchimage-based tactilesensors,i.e.,the GelTip [18,19],inSection 1.3.The GelTip isshaped asafinger,andthusitcanbeinstalledontraditionalandoff-the-shelfgrippers toreplaceitsfingersandenablecontactstobesensedinsideandoutsidethe graspclosurethatareshowninFig. 1.1.InSection 1.4,wewilllookintoexperimentscarriedoutusingthe GelTip sensorthatdemonstratehowcontactscan belocalized,andmoreimportantly,theadvantages,andpossiblyanecessity,of leveragingall-aroundtouchsensingindexterousmanipulationtasksinclutter. Inparticular,experimentscarriedoutinaBlocksWorldenvironmentshowthat thedetectedcontactsonthefingerscanbeusedtoadaptplannedactionsduring thedifferentmomentsofthereach-to-graspmotion.
1.2Anoverviewofthetactilesensors
Comparedtoremotesensorslikecameras,tactilesensorsaredesignedtoassess thepropertiesoftheobjectsviaphysicalinteractions,e.g.,geometry,texture,humidity,andtemperature.Alargerangeofworkingprincipleshavebeenactively proposedintheliteratureinthepastdecades[2,5,20].Anopticaltactilesensor
FIGURE1.1 Therearetwodistinctareasofcontacthighlightedintherobotgripperduringamanipulationtask: (A) outsidecontactswhentherobotisprobingorsteeringtheobjecttobegrasped; (B) insidecontactswhentheobjectiswithinthegraspclosure,whichcanguidethegrasping.
usesacameraenclosedwithinitsshellandpointingatitstactilemembrane(an opaquewindowmembranemadeofasoftmaterial)tocapturetheproperties oftheobjectsfromthedeformationscausedtoitstactilemembranebytheincontactobject.Suchcharacteristicsensurethatthecapturedtactileimagesare notaffectedbytheexternalilluminationvariances.Toperceivetheelastomerdeformationsfromthecapturedtactileimages,multipleworkingprincipleshave beenproposed.Wegroupsuchapproachesintwocategories:markertracking andrawimageanalysis.Opticaltactilesensorscontrastwithelectronictactile skinsthatusuallyhavelowerthicknessandarelessbulky.Theyareflexibleand canadapttodifferentbodypartsoftherobotthathavevariouscurvaturesandgeometryshapes.However,eachsensingelementofmostofthetactileskins,e.g., acapacitivetransducer,hasthesizeofafewsquaremillimetersorevencentimeters,whichresultsinalimitedspatialresolutionofthetactileskins.Here wedonotcoversuchskinsastheseareanextensivetopiconitsown;however, wepointthereadertotwosurveysthatextensivelycoverthesesensors[21,22].
1.2.1Marker-basedopticaltactilesensors
Thefirstmarker-basedsensorproposalcanbefoundin[23];however,morerecentlyanimportantfamilyofmarker-basedtactilesensorsistheTacTipfamily ofsensorsdescribedin[9].Sinceitsinitialdomed-shapedversion[15],different morphologieshavebeenproposed,includingtheTacTip-GR2[24]ofasmaller fingertipdesign,TacTip-M2[25]thatmimicsalargethumbforin-handlinear manipulationexperiments,andTacCylindertobeusedincapsuleendoscopyapplications.Thankstotheirminiaturizedandadapteddesign,TacTip-M2[25]and TacTip-GR2[24]havebeenusedasfingers(orfingertips)inroboticgrippers. AlthougheachTacTipsensorintroducessomemanufacturingimprovementsor novelsurfacegeometries,thesameworkingprincipleisshared:whitepinsare
imprintedontoablackmembranethatcanthenbetrackedusingcomputervision methods.
AsshowninTable 1.1,therearealsootheropticaltactilesensorsthattrack themovementsofmarkers.In[26],anopticaltactilesensornamedFingerVisionisproposedtomakeuseofatransparentmembrane,withtheadvantage ofgainingproximitysensing.However,theusageofthetransparentmembrane makesthesensorlacktherobustnesstoexternalilluminationvarianceassociated withtouchsensing.In[27],semiopaquegridsofmagentaandyellowmakers paintedonthetopandbottomsurfacesofatransparentmembraneareproposed, inwhichthemixtureofthetwocolorsisusedtodetecthorizontaldisplacements oftheelastomer.In[28],greenfluorescentparticlesarerandomlydistributed withinthesoftelastomerwithblackopaquecoatingsothatahighernumberof markerscanbetrackedandusedtopredicttheinteractionwiththeobject,accordingtotheauthors.In[29],asensorwiththesamemembraneconstruction method,fourRaspberryPIcameras,andfisheyelenseshasbeenproposedfor opticaltactileskins.
1.2.2Image-basedopticaltactilesensors
Ontheothersideofthespectrum,theGelSightsensors,initiallyproposed in[16],exploittheentireresolutionofthetactileimagescapturedbythesensor camera,insteadofjusttrackingmarkers.Duetothesoftopaquetactilemembrane,thecapturedimagesarerobusttoexternallightvariationsandcaptureinformationofthetouchedsurface’sgeometrystructure,unlikemostconventional tactilesensorsthatmeasurethetouchingforce.Leveragingthehighresolution ofthecapturedtactileimages,high-accuracygeometryreconstructionsareproducedin[31–36].In[31],thissensorwasusedasfingersofaroboticgripperto insertaUSBcableintothecorrespondingporteffectively.However,thesensor onlymeasuresasmallflatareaorientedtowardsthegraspclosure.In[37,38], simulationmodelsoftheGelSightsensorsarealsocreated.
MarkerswerealsoaddedtothemembraneoftheGelSightsensors,enablingapplyingthesamesetofmethodsthatwereexploredintheTacTip sensors.Therearesomeothersensordesignsandadaptationsforroboticfingers in[10,39,40].In[10],mattealuminumpowderwasusedforimprovedsurface reconstruction,togetherwiththeLEDsbeingplacednexttotheelastomerand theelastomerbeingslightlycurvedonthetop/externalside.In[39],theGelSlimisproposed,adesignwhereinamirrorisplacedatashallowandoblique angleforaslimmerdesign.Thecamerawasplacedonthesideofthetactile membrane,suchthatitcapturesthetactileimagereflectedontothemirror.A stretchytexturedfabricwasalsoplacedontopofthetactilemembranetopreventdamagestotheelastomerandtoimprovetactilesignalstrength.Recently, anevenmoreslimdesignof2mmhasbeenproposed[41],whereinanhexagonalprismaticshapinglensisusedtoensureradiallysymmetricalillumination. In[40],DIGITisalsoproposedwithaUSB“plug-and-play”portandaneasily replaceableelastomersecuredwithasinglescrewmount.
TABLE1.1 Asummaryofinfluentialmarker-basedopticaltactilesensors.
Sensorstructure Illuminationandtactilemembrane
TacTip [15] The TacTip hasadomed (finger)shape, 40 × 40 × 85 mm,and tracks127pins.Ituses theMicrosoftLifeCam HDwebcam.
TacTip-M2 [25]
TacTip-GR2 [24]
Ithasathumb-likeor semicylindricalshape, withTacTip-M2 32 × 102 × 95 mm,andit tracks80pins.
Ithasaconeshapewitha flatsensingmembrane andissmallerthanthe TacTip, 40 × 40 × 44 mm, tracks127pins,anduses theAdafruitSPYPI camera.
TacCylinder [30]
FingerVision [26]
Subtractive colormixing [27]
Green markers [28]
Acatadioptricmirroris usedtotrackthe 180markersaroundthe sensorcylindricalbody.
ItusesaELPCo.
USBFHD01M-L180 camerawithan180 degreefisheyelens.Ithas approximately 40 × 47 × 30 mm.
N/A
Multicamera skin [29]
Thesensorhasaflat sensingsurface,measures 50 × 50 × 37 mm,andis equippedwithanELP USBFHD06HRGB camerawithafisheye lens.
Ithasaflatprismatic shapeof 49 × 51 × 17 45 mm.Four Picamerasareassembled ina 2 × 2 arrayand fisheyelensesareusedto enableitsthinshape.
Themembraneisblackontheoutside withwhitepinsandfilledwith transparentelastomerinside.Initially themembranewascastfromVytaFlex 60siliconerubber,thepinspaintedby hand,andthetipfilledwithoptically clearsiliconegel(Techsil,RTV27905); however,currentlytheentiresensorcan be3Dprintedusingamultimaterial printer(StratasysObjet260Connex), withtherigidpartsprintedinVero Whitematerialandthecompliantskin intherubber-likeTangoBlack+.
Themembraneistransparent,made withSiliconesInc.XP-565,with4mm ofthicknessandmarkersspacedby 5mm.Nointernalilluminationisused, asitthemembranetransparent.
Twolayersofsemiopaquecolored markersisproposed.SortaClear12from Smooth-On,clearandwithIgnite pigment,isusedtomaketheinnerand outersides.
Itiscomposedofthreelayers:stiff elastomer,softelastomerwithrandomly distributedgreenfluorescentparticlesin it,andblackopaquecoating.Thestiff layerismadeofELASTOSIL®RT601 RTV-2andispoureddirectlyontopof theelectronics,thesoftlayerismadeof Ecoflex™GEL(shorehardness000-35) withthemarkersmixedin,andthefinal coatlayerismadeofELASTOSIL®RT 601RTV-2(shorehardness10A)black silicone.Acustomboardwithanarray ofSMDwhiteLEDsismountedonthe sensorbase,aroundthecamera.