OpticalFiberSensors fortheNext Generationof RehabilitationRobotics
ArnaldoLeal-Junior
MechanicalEngineeringDepartment
FederalUniversityofEspiritoSanto Vitória,Brazil
AnselmoFrizera-Neto
ElectricalEngineeringDepartment
FederalUniversityofEspiritoSanto Vitória,Brazil
AcademicPressisanimprintofElsevier 125LondonWall,LondonEC2Y5AS,UnitedKingdom 525BStreet,Suite1650,SanDiego,CA92101,UnitedStates 50HampshireStreet,5thFloor,Cambridge,MA02139,UnitedStates TheBoulevard,LangfordLane,Kidlington,OxfordOX51GB,UnitedKingdom
Copyright©2022ElsevierInc.Allrightsreserved.
Nopartofthispublicationmaybereproducedortransmittedinanyformorbyanymeans, electronicormechanical,includingphotocopying,recording,oranyinformationstorageand retrievalsystem,withoutpermissioninwritingfromthepublisher.Detailsonhowtoseek permission,furtherinformationaboutthePublisher’spermissionspoliciesandourarrangements withorganizationssuchastheCopyrightClearanceCenterandtheCopyrightLicensingAgency, canbefoundatourwebsite: www.elsevier.com/permissions.
Thisbookandtheindividualcontributionscontainedinitareprotectedundercopyrightbythe Publisher(otherthanasmaybenotedherein).
Notices
Knowledgeandbestpracticeinthisfieldareconstantlychanging.Asnewresearchand experiencebroadenourunderstanding,changesinresearchmethods,professionalpractices,or medicaltreatmentmaybecomenecessary.
Practitionersandresearchersmustalwaysrelyontheirownexperienceandknowledgein evaluatingandusinganyinformation,methods,compounds,orexperimentsdescribedherein.In usingsuchinformationormethodstheyshouldbemindfuloftheirownsafetyandthesafetyof others,includingpartiesforwhomtheyhaveaprofessionalresponsibility.
Tothefullestextentofthelaw,neitherthePublishernortheauthors,contributors,oreditors, assumeanyliabilityforanyinjuryand/ordamagetopersonsorpropertyasamatterofproducts liability,negligenceorotherwise,orfromanyuseoroperationofanymethods,products, instructions,orideascontainedinthematerialherein.
LibraryofCongressCataloging-in-PublicationData
AcatalogrecordforthisbookisavailablefromtheLibraryofCongress
BritishLibraryCataloguing-in-PublicationData
AcataloguerecordforthisbookisavailablefromtheBritishLibrary
ISBN:978-0-323-85952-3
ForinformationonallAcademicPresspublications visitourwebsiteat https://www.elsevier.com/books-and-journals
Publisher: MaraConner
AcquisitionsEditor: SonniniR.Yura
EditorialProjectManager: IsabellaC.Silva
ProductionProjectManager: SojanP.Pazhayattil
Designer: VictoriaPearson
TypesetbyVTeX
2.1Softrobots:definitionsand(bio)medicalapplications
2.2Softrobotsforrehabilitationandfunctionalcompensation
2.3Human-in-the-loopdesignofsoftstructuresandhealthcare systems
2.3.1Human-in-the-loopsystems34
2.3.2Human-in-the-loopapplicationsandcurrenttrends37
2.3.3Human-in-the-loopdesigninsoftwearablerobots39
2.4Currenttrendsandfutureapproachesinwearablesoftrobots
3.3Gaitanalysissystems:fixedsystemsandwearablesensors
4.1Historicalperspective
4.2Lightpropagationinopticalwaveguides
4.3Opticalfiberpropertiesandtypes
4.4Passiveandactivecomponentsinopticalfibersystems
4.4.1Lightsources77
4.4.2Photodetectors77
4.4.3Opticalcouplers79
4.4.4Opticalcirculators80
4.4.5Spectrometersandopticalspectrumanalyzers81
4.5Opticalfiberfabricationandconnectionmethods 83
4.5.1Fabricationmethods84
4.5.2Opticalfiberconnectorizationapproaches87 References 89
5.Opticalfibermaterials
5.1Opticallytransparentmaterials
5.2Viscoelasticityoverview
5.3Dynamicmechanicalanalysisinpolymeropticalfibers 101
5.3.1DMAonPMMAsolidcorePOF103
5.3.2DynamiccharacterizationofCYTOPfibers107
5.4Influenceofopticalfibertreatmentsonpolymerproperties 111 References 115
6.Opticalfibersensingtechnologies
6.1Intensityvariationsensors 119
6.1.1Macrobendingsensors120
6.1.2Lightcoupling-basedsensors125
6.1.3Multiplexedintensityvariationsensors127
6.2Interferometers 129
6.3Gratings-basedsensors 133
6.4Compensationtechniquesandcross-sensitivitymitigationin opticalfibersensors
7.Wearablerobotsinstrumentation
7.1Opticalfibersensorsonexoskeleton’sinstrumentation
7.2Exoskeleton’sangleassessmentapplicationswithintensity variationsensors 152
7.2.1Casestudy:activelowerlimborthosisforrehabilitation (ALLOR)156
7.2.2Casestudy:modularexoskeleton157
7.3Human-robotinteractionforcesassessmentwithFiberBragg Gratings 160
7.4Interactionforcesandmicroclimateassessmentwithintensity variationsensors 166
References 172
8.Smartstructuresandtextilesforgaitanalysis
8.1Opticalfibersensorsforkinematicparametersassessment 175
8.1.1Intensityvariation-basedsensorsforjointangle assessment175
8.1.2FiberBragggratingssensorswithtunablefilter interrogationforjointangleassessment178
8.2Instrumentedinsoleforplantarpressuredistributionand groundreactionforcesevaluation 183
8.2.1FiberBragggratinginsoles183
8.2.2Multiplexedintensityvariation-basedsensorsforsmart insoles188
8.3Spatiotemporalparametersestimationusingintegratedoptical fibersensors 198 References 199
9.Softroboticsandcompliantactuatorsinstrumentation
9.1Serieselasticactuatorsinstrumentation 201
9.1.1Torquemeasurementwithintensityvariationsensors202
9.1.2Torquemeasurementwithintensityvariationsensors206
9.2Tendon-drivenactuatorsinstrumentation 212
9.2.1Artificialtendoninstrumentationwithhighlyflexible opticalfibers213 References 217
PartIV Casestudiesandadditionalapplications
10.Wearablemultifunctionalsmarttextiles
10.1Opticalfiberembedded-textilesforphysiologicalparameters monitoring 223
10.1.1Breathandheartratesmonitoring224
10.1.2Bodytemperatureassessment232
10.2Smarttextileformultiparametersensingandactivities monitoring 234
10.3Opticalfiber-embeddedsmartclothingformechanical perturbationandphysicalinteractiondetection 239
11.Smartwalker’sinstrumentationanddevelopmentwith compliantopticalfibersensors
11.1Smartwalkers’technologyoverview
11.2Smartwalkerembeddedsensorsforphysiologicalparameters assessment 247
11.2.1Systemdescription247
11.2.2Preliminaryvalidation250
11.2.3Experimentalvalidation252
11.3Multiparameterquasidistributedsensinginasmartwalker structure 252
11.3.1Experimentalvalidation252
11.3.2Experimentalvalidation256
12.Opticalfibersensorsapplicationsforhumanhealth
12.1Roboticsurgery
12.2.1Introductiontobiosensing269
12.2.2Backgroundonopticalfiberbiosensingworking principles271
12.2.3Biofunctionalizationstrategiesforfiberimmunosensors276
12.2.4Immunosensingapplicationsinmedicalbiomarkers detection279
Preface
Theadvancesinmedicineandphysicaltherapyinconjunctionwithnewdevelopmentsofmechatronicdeviceswithahigherlevelofcontrollabilityenabled thedevelopmentofassistiveroboticdevices,whichareexploredbymanyresearchgroupsaroundtheworld.Concurrently,thereisthedevelopmentand widespreadofopticalfibertechnology,whichisincreasinglyusedassensors devices.Theopticalfibersensorscharacteristicsarewellalignedwiththerequirementsofroboticinstrumentation,especiallytheoneswithelectricmotors, commonlyusedinwearablerobots:Opticalfibersensorsareimmunetoelectromagneticperturbationsofferingprecisemeasurementsinnoiseenvironments. Inaddition,theflexibilityofopticalfibersisalsoalignedwiththenewtrends insoftandflexibleroboticsystems,wherethesensorscanbeembeddedinthe robot’sstructureortheycanbeplacedonwearabledevicesforpatientmonitoring.Yearsago,alloftheseadvancesresultedinanewresearchdirection,where theopticalfibersensorswereusedontherobots’instrumentationtoextendtheir controlcapabilitiesbymeasuringparametersthatwerenotcommonlymeasured withconventionalelectromechanicalsensors.
Theresultsofyearsofresearchinroboticsandopticalfibersensorsina jointeffortoftheGraduatePrograminElectricalEngineeringandMechanical EngineeringDepartmentoftheFederalUniversityofEspiritoSanto(UFES)are summarizedinthisbook.Theaimofthisbookistoprovideacomprehensive understandingonthisnewresearchtopicanditsunderlyingtheoryandprinciples.Thisbookwasproposedandconceivedundertheassumptionthatthe nextgenerationofwearablerobotsanddevicesnotonlywillincludethesoft structureandcompliantactuators,butalsothenewopticalfibersensorsembeddedintherobots’structureandactuationunits.Wedividedthebookintofour parts.Inthefirstpartofthisbook,thedevelopmentsinwearablerobotsand assistivedevicesaswellashuman-in-the-loopdesignandtherecentdevelopmentsonsoftroboticsarediscussed.Inthesecondpart,thefocusisshiftedto opticalfibersincludingthepresentationofanoverview,themaincomponents, andcharacteristicsofanopticalfiber-baseddetectionsystemandthematerials commonlyusedonthedevelopmentofopticalsensors.Moreover,opticalfiber sensorsapproachesarepresented.Thethirdpartpresentstheopticalfiber-based instrumentationsystemsinwearablerobotsandassistivedevices,resultingin
x Preface
thecombinationoftheknowledgeacquiredinthefirstandsecondpartsofthe book.Thediscussedsystemsincludewearablerobots,smartstructuresinwhich thesensorsareembeddedinrigidand/orsoftstructuresoftherobots,compliant actuatorsandsmartwearabletextilesforpatientsmonitoring.Inthelastpart ofthebook,differentcasestudiesandadditionalapplicationarepresentedto provideabroaderviewofthemanypossibilitiesofopticalfibersensorsinassistivedevices,whichincludethedevelopmentsinsmartwalker’sinstrumentation, roboticsurgerywithmanipulators,physiologicalparametersmonitoringusing multifunctionaltextiles,andeveninbiosensorsforhealthassessment.
Thisbookcouldnotbewrittenwithoutthehardworkofthecontributors, L.Avellar,V.Biazi,W.Coimbra,andL.Vargas-Valencia,allofthemfrom UFES,contributedforsomechaptersthroughoutthebook.C.Marquesfrom UniversityofAveiro,alongtimecontributorinourresearchgrouphelpedus onthebiosensorsapplicationsusingopticalfibers.Theadvancesandmethods discussedinthisbookweredevelopedintheframeworkofdifferentresearch projectsfocusedonrehabilitationoropticalfibersensingtechnologiesasfollows:
–Activetransparentorthosisforrehabilitationandmovementassistance (CAPES88887.095626/2015-01);
–ResearchCenteronPhotonicsandAdvancedSensing(FAPES84336650);
–Opticalfibersensorsnetworkforpatientsremotemonitoring(FAPES 320/2020);
–Opticalfibersensorsinoil-waterinterfacemeasurementinproductiontanks (Petrobras2017/00702-6).
Wewouldalsoliketothankallthesupportfromourcolleaguesinwritingthis book.
ArnaldoLeal-Junior AnselmoFrizera-Neto FederalUniversityofEspiritoSanto,Vitória,Brazil
wearabletechnologies
1.1Motivation
Sincetheearlydaysofhumanhistory,thereisacontinuousincreaseinthelife expectancy,whichleadstothepopulationaging.Inhalfofacentury,from1950 to2000,theelderlypopulation(over65years)rosefrom131millionin1950to 418millionin2000,morethanathreefoldincreasein50years(Rowland, 2009). Thisincreaseinlongevityreflectstheevolutionofthesocietywithadvances onpublichealth,medicine,economyandsocialdevelopment(UnitedNations, 2019).Alloftheseadvancescontributetothecontrolofdiseases(includingthe eradicationofsomediseases),injuriesprevention,andreductionofpremature deaths(especiallyinnewborns).Insummary,manyhealthconditionsthatwere deadlyinthepast(includingdiseasessuchassmallpoxandpolio)nowadaysare treatableorcurable.AccordingwithUnitedNations(UN)reports,therearefour trendsintheglobalpopulation,whicharethepopulationgrowth,urbanization, internationalmigration,andthepopulationaging(Turner, 2009).
Generally,theelderlypopulationisdefinedasnumberofpeopleover65 years,whereastheworkingagesaredefinedastheintervalbetween25and64 years.Inaddition,therearethechildren(whoseagesare0to14years)andthe youthpopulation,agesbetween15and24years.Therefore,commonmetrics tosetthesceneofpopulationagingarethepercentagecompositionofthepopulation,consideringallfourgroups,i.e.,children,youth,working-ageadults, andolderpopulation.Therefore,commonmetricstosetthesceneofpopulationagingarethepercentagecompositionofthepopulation,consideringall fourgroups,i.e.,children,youth,working-age,andolderpopulation(United Nations, 2019).Fig. 1.1 showsthepopulationpercentagewith65yearsorolder from1950to2020andincludesstatisticalprojectionsforthenext80years(until 2100).
Intheanalysisofthepopulationaging,someunderlyingfactorssuchasaccessibilitytomedicalcare,publichealthpolicies,andsocialdevelopmentshould alsobeconsidered.Thesefactorsarenotuniformlydistributionamongcountries,andthustherearecountrieswithhigherproportion(andincreaserate)of elderlypeople.Theincreaseofelderlypopulationacrossthecountriesishigher inmoredevelopedregionsandinhigherincomecountries.In1950,Francewas thecountrywithhighestproportionofanolderpopulation(11.4%).Then,in
FIGURE1.1 Worldpopulationagingthroughouttheyearsandpredictionsforthenext80years (UnitedNations, 2019).
FIGURE1.2 Populationwith65yearsorolderineachregion(UnitedNations, 2019).
1975,Swedenwastheleadingcountryinelderlieswith15.1%ofthepopulationover65years.TheincreaseofanelderlypopulationcontinuesasItalyhad 18.1%in2000(Rowland, 2009).ThistrendcontinueswithEuropeandNorthernAmericaastheregionswiththehighestratioofanelderlypopulation,as showninFig. 1.2
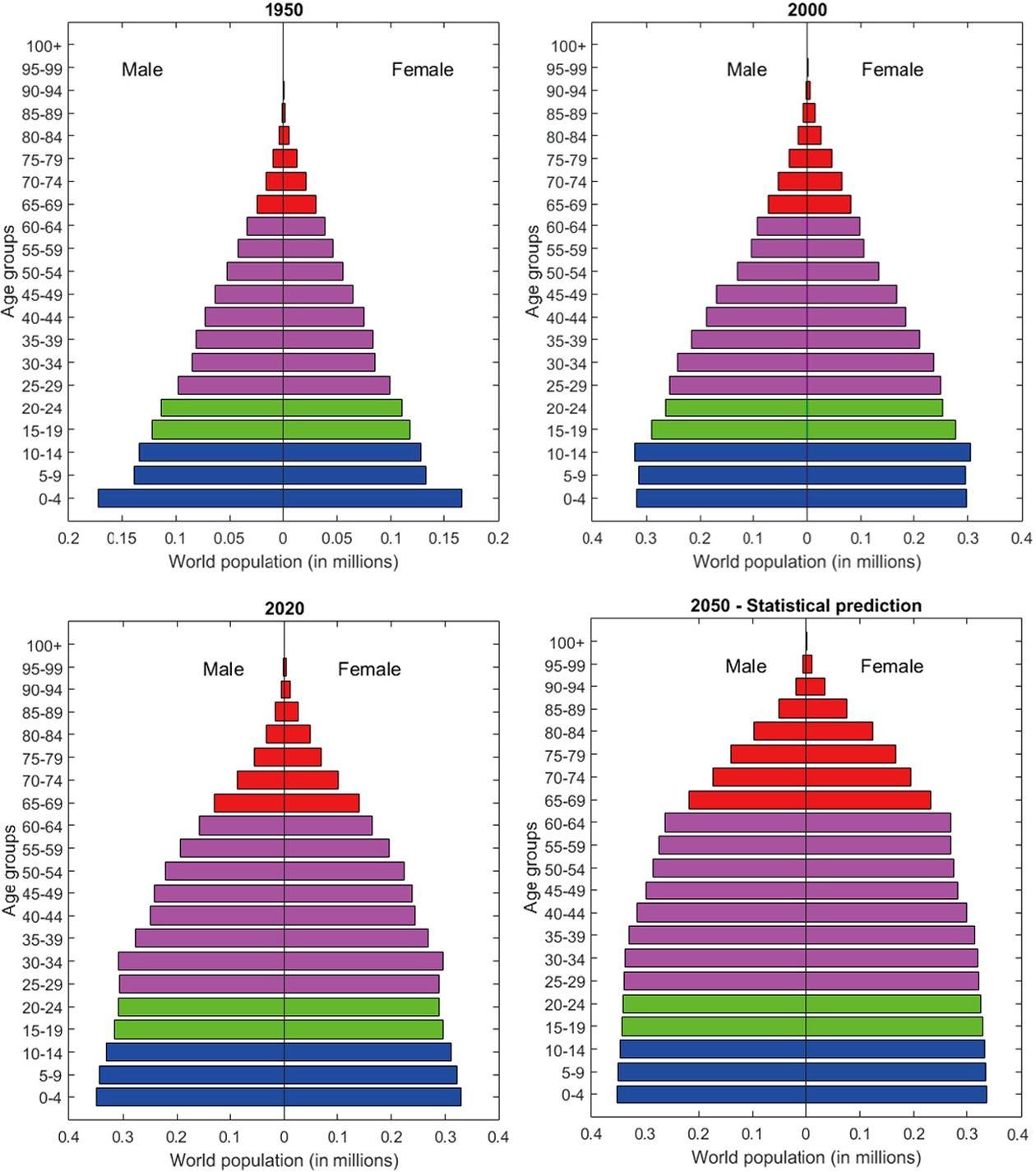
AsshowninFig. 1.2,NorthernAmerica,Europe,Australia,andNew Zealandaretheregionswiththehighestelderlypopulationproportion.Itisalso worthnotingthattheEasternandSoutheasternAsiaregionistheonewiththe highestincreaserateintheolderpopulation,especiallyafter2010.However,it ispossibletoobservethatalmostallregionsshowedanincreaseoftheelderly populationthroughouttheyears.Astheolderpopulationproportionistheratio betweenthepopulationover65yearsandthetotalpopulation,suchincreasein theelderlypopulationproportionalsoisrelatedtoafertilityreductiontrendin theworldwidepopulation.AsdepictedinFig. 1.1,thereisnosubstantialincreaseonthepopulationbetween0–4years.Theso-calledagepyramidisthe agepopulationdistributionacrosstheagegroups,asshowninFig. 1.3.Theage pyramidbarelyresemblesatriangularshapenowadaysandwillcontinuously changeaccordingtostatisticalprojections.
Thedemographictransitioninworldpopulationsetsnewchallengesindifferentareas,inaneconomicalperspective,theincreaseofanolderpopulation increasesthedemandsforpensions,especiallywhencombinedwithareduction oftheratiobetweentheelderlyandworking-agepopulation(Turner, 2009).Anotherchallengeisrelatedtothehealthcareoftheelderlypopulationthatsuffers frominherentconditionsofnormalagingsuchasimmunosenescence,urologic andsensorychanges,whichincludehearingloss,visualacuity,andvestibular functiondegradation(JaulandBarron, 2017).Suchconditionsleadtovariation inphysicalfunctions,includingthereductionofwalkingspeed,mobilitydisability,difficultyinactivitiesofdailyliving,andincreaseoffallrisk(Jauland Barron, 2017).Thedegradationofphysicalfunctionsinconjunctionwiththe cognitivereductioncanalsoleadtopsychologicalandsocialissues(Jauland Barron, 2017).Thepopulationagingalsoresultsinanincreaseofclinicalconditionsthataffectthehumanhealth,theso-calledchronicage-relateddiseases andgeriatricsyndromes(Franceschietal., 2018).Theseconditionsincludeosteoarthritis,rheumatoidarthritis,Alzheimer’sdisease,Parkinson’sdisease,and weaknessoftheskeletalmuscles.Alloftheseconditionsleadtodegradationof physicaland/orcognitivefunctions(Franceschietal., 2018).Itisworthnoting thatstrokes,spinalcordinjuries,andmusculoskeletalinjuriescanalsoleadto majorlocomotorimpairments(Huoetal., 2016)
Disabilitiesandimpairmentsintheworldpopulationareincreasingdueto factorssuchaspopulationagingandtheincreaseinchronicdiseases(Organization, 2011).In2019,nearly15%oftheworldpopulationhaveatleastoneofthe manytypesofdisabilities,whichrepresentabout1billionpeopleintheentire world(Organization, 2018).Thephysicalandcognitivedisabilitieshaveamajor impactindailylifesincetheyimposelimitationsonworkperformance,activitiesofdailyliving,andhindertheindependentdevelopmentinthecommunity (AllenandHogan, 2001).Ifahigh-incomecountrysuchasUnitedStatesof America(USA)isanalyzed,about26%ofadultshavesomeformofdisability (Ferneini, 2017).Fig. 1.4 showsthetypesoffunctionalimpairmentamongthe 26%group,whichresultedin61millionpeople.
FIGURE1.3 Agepyramidevolutionworldwidefrom1950to2020,includingprojectionsforthe next30years.Eachcolorrepresentsoneagegroup,i.e.,0–14years,15–24years,25–64years,and theonesolderthan65years(UnitedNations, 2019).
AsshowninFig. 1.4,themostcommondisabilityismobility,causedbylocomotorimpairment,wheredifferentclinicalconditionscanleadtoamultitude ofgaitdisorders,assummarizedinFasanoandBloem(2013).Inanattemptof mitigating(oreliminating)thephysicalimpairments,thephysicalrehabilitation emergesasafeasibleoptionwithpredefinedclinicalguidesfortherehabilitationofdifferentdisorders(PirkerandKatzenschlager, 2017).However,asthe populationwithphysicaldisabilityincreases,manyregionsreportshortagein physiotherapistsandrehabilitationpersonnel(Organization, 2011).Actually,for high-incomecountries,thereisabout5physiotherapistsper10,000population andthisnumberisevenlowerforlow-incomeregions(Organization, 2011).
FIGURE1.4 TypesofdisabilitiesintheUSA(Ferneini, 2017).
Thisscenariohaspushedtheboundariesfornoveltherapeuticmethodsandassistancedevicesforpatientswithlocomotorimpairment,whichalsoresultinthe developmentofnoveldeviceswiththeaimofmonitoringparametersforhuman healthassessment(Majumderetal., 2017).
Inordertoofferindependenceandattenuatetheeffectsofhumangaitdisordersandphysicalimpairments,differentassistancedeviceshavebeenproposed throughouttheyears,e.g.,prostheses(Haetal., 2011),exoskeletons(Bayonet al., 2016),orthosis(dosSantosetal., 2015)andsmartwalkers(SWs)(Martins etal., 2012).Thelatterisgenerallyusedasasupportingdeviceinthepatients bipedestation,whichaidsintheirbalance,andthus,improvingthemobility (Martinsetal., 2012).SWspresentactuatorsandelectroniccomponentsaimingtoprovideabetterassistancetotheusers,wherethefunctionalitiesofsuch devicesincludeautonomouscontrolwiththepossibilityofsharedormanual controlaswell,sensorialfeedback,highersafety,andthepossibilityofmonitoringtheuser’state(Martinsetal., 2015).Amongthewearableroboticdevices forrehabilitation,exoskeletonsshowadvantagesoverconventionalrehabilitationtherapiesrelatedtotheirhigherrepeatabilityintherehabilitationexercises, possibilityoftreatmentcustomization,andquantitativefeedbackofthepatient’s recovery(Kwakkeletal., 2008).Inaddition,wearablerobotscontrolstrategies forhuman-robotphysicalandcognitiveinteractionsenableusingexoskeletons asassistancedevicesfordailyactivities,whichincludegaitassistance(Bueno etal., 2008).
Thepossibilityofmonitoringparametersofmovementaswellasphysiologicalparametersforhumanhealthenablesnoveldevelopmentsinhealthcarein
whichitispossibletoassessthepatient’sconditionforthecontinuousmonitoringofhealthconditionsaswellasthepossibilityofanticipatingsomediseases and/ordisorders.Themonitoredparametersforhumanhealthassessmentincludefootplantarpressure,whichprovidesimportantdataregardingthehuman locomotion(AbdulRazaketal., 2012).Withtheplantarpressureassessment,it ispossibletoobtainafootpressuredistributionmap,whichplaysanimportant roleonthemonitoringoffootulcerations(ofparticularimportancefordiabetes patients).Inaddition,footpressuremapsenablemeasurementsoffoot-function indexessuchasarchindex,whichprovidetheevaluationofthearchtypeof eachindividualthatisalsorelatedtoinjuriesinrunners(Teyhenetal., 2009). Furthermore,thedynamicevaluationofthefootplantarpressurecanalsoaid cliniciansonthegaitrelatedpathologiesdiagnosis(Leal-Junioretal., 2018a).
Thegaitcycleisdividedintotwomainphases:stanceandswing,which presentmanysubdivisions(Taborrietal., 2016).Thesubdivisionsofthestance phasecanbedetectedbytheplantarpressurevariationanditiscriticalforthe controlofwearabledevicesforgaitassistance(Villa-Parraetal., 2017).Additionally,themeasurementandanalysisofjointanglescanprovidebenefitsfor cliniciansandtherapistssinceitisusedontheevaluationandquantification ofsurgicalinterventionsandrehabilitationexercises(Dejnabadietal., 2005). Inaddition,suchmeasurementscanbeappliedfortrainingathletes(Hawkins, 2000)andthekinematicdatahavebeenemployedonthecontrolofneuralprostheses(TongandGranat, 1999).
Furthermore,wearablesensorscanbeusedonhealthcareapplications(Nag etal., 2017).Tothatextent,significantadvancesinsensortechnology,wireless communications,anddataanalysishaveenabledachangeofscenario,wherethe healthconditionassessmentisnotlimitedtoclinicalenvironments(Korhonenet al., 2003).Thusitisalsopossibletomonitordifferentphysiologicalparameters forpatientsathome,whichisespeciallydesirablefortheelderlypopulation andpeoplewithlocomotordisabilities(Majumderetal., 2017).Amongmany importantphysiologicalparameters,abnormalitiesontheheartrate(HR)and breathingrate(BR)areimportantindicatorsofsomecardiovasculardiseases (Böhmetal., 2015),fatigue(Nishyamaetal., 2011),apnea(Nishyamaetal., 2011),andrespiratoryabnormalities(Straußetal., 2014).
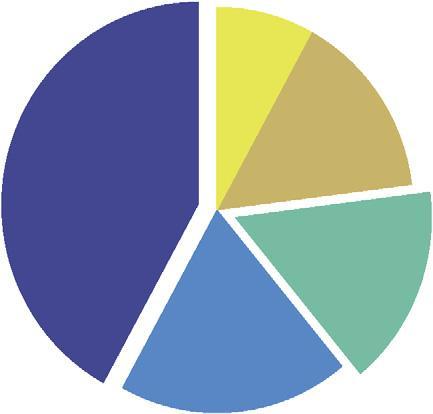
Thesenewadvancesinhealthcaretechnologyprovidenewinsightsforrehabilitationandtherapeutics,whereawidespreadofwearabletechnologieshas beenobservedinthelastyearswithanimpactinindustrialmanufacturingfor thesenewproducts,regulations,anddatasecurity(Erdmieretal., 2016).From theuserperspective,methodsforincreasingthepatientengagementontheuse ofsuchtechnologiesarealsoproposed(Tranetal., 2019).Furthermore,challengesrelatedtothetechnologysustainability,failurerates,privacy,andsecurity havebeenaddressed(Bove, 2019).Thewidespreadofwearableassistivetechnologiesinconjunctionwiththeincreaseonthepatientengagementresultina continuousincreaseonthemarketofwearablehealthcaredevices(TheEuropeanCommunities, 2016).Fig. 1.5 showsanoverviewoftheEuropeanmarket
onhealthcarewearabledevices,wherealargeincreaseonthemarketcanbe seenwiththeforecastofevenhigherincreaseinthecomingyears.Inaddition, Fig. 1.5 alsoshowsthatalmostahalf(42%)ofthewearabledevicesarefocused onhealthcareapplicationsandthisvaluecanbeevenhigherifweconsiderthat otherhealthcareapplicationsarerelatedtomonitoringandsensing(16%ofall applications).
FIGURE1.5 Wearabledevicesapplicationsandhealthcaremarketoverview(TheEuropeanCommunities, 2016).
Thecontinuousagingofthepopulationaswellastheincreaseonchronic diseasesandphysicalimpairmentsintheworldpopulationmotivatethedevelopmentofnewsmart/roboticdevicesforhumanassistanceandhealthcondition assessment.Nowadays,suchtechnologieshavealargeshareonthemarketand areprogressivelypresentinourdailylife.Itispossibletoclassifysuchtechnologiesintotwomajorgroups:(i)wearableroboticsandassistivedevicesand(ii) wearablesensorsandmonitoringdevices.Bothgroupsarethoroughlydiscussed inthenextsections.
1.2Wearableroboticsandassistivedevices
Robotswereoriginallydesignedtoreplacehumansinrepetitiveorpreciseindustrialtaskswhereminimalornointeractionwiththeoperatoroccurred.Currently,itisusualtonoticerobotsclosetothehumaninanunimaginablesetof scenarios,fromcleaningrobotstorehabilitationandfunctionalcompensation devices(Huoetal., 2016).Eveninindustrialenvironments,thereishumanrobotcooperationtodevelopcomplexandheavy-dutytasks.Inthiscontext, thereisacontinuouschangeoftheparadigmofrobotsdesignandcomplex (physicalandcognitive)human-robotinteractionisatthecenteroftechnologicaldevelopment(Morenoetal., 2008).
Wearablerobots(WR)aredefinedasthosewornbyhumanoperatorsaiming atsupplementingorevenreplacingphysicalfunctions(Morenoetal., 2008). Additionally,wearablerobotscanbeusedtoreplacemissinglimbs,asprostheticdevices,oralongsidewithhumanlimbs,creatingtheso-calledorthotic devicesorexoskeletons.Inthiscontext,itisimportanttodefinephysicalhumanrobotinteraction(pHRI)asthegenerationofsupplementaryforcestoempower andovercomehumanphysicalandmotorlimitsderivingfromtraumaordisease(Alamietal., 2006).Physicalhuman-robotinteractioninvolvesanetflux ofpowerbetweenthewearabledeviceandtheuser.Alternatively,cognitive human-robotinteraction(cHRI)impliesmakingthehumanawareofthepossibilitiesoftherobotatthesametimethattheindividualcontrolstherobotic device(Pons, 2010).Consideringthecontextofmotorcontrol,cognitiveprocessleadstoplanningandexecutionofmotortasks,involvingactivityfrom centralandperipheralstructures.Thusinformationtodecodehumanintention isgatheredfromdifferentlevelsofthisprocess,fromcentralandperipheralnervoussystemstohumanmotion,whichresultinbrain-,neural-andmovementcontrolledexoskeletons(Pons, 2010).BothcHRIandpHRIhavedirectimpact ontheusabilityanddependabilityofassistiverobotictechnologies.TheconceptsofcHRIandpHRIarealsotranslatedtootherapplicationsofrehabilitation robotics,suchaspreviouslyproposedinhuman-robotinteractionforlocomotion assistancewithsmartwalkers(CifuentesandFrizera, 2016).
Thedevelopmentofdifferentinstancesofwearablerobotsisintricately linkedtotheapplicationsforwhichtheyareproposed.ResearchandtechnologicaldevelopmentsofWRdatefromtheearly1960s,whentheUSDepartmentof Defenseproposedtheconceptofpoweredsuits.Inparallel,CornelAeronautical Laboratoriesbroughttolighttheconceptofhumanamplifiersasmanipulators toenhancethephysicalcapabilitiesoftheoperator(Roconetal., 2008).Infact, accordingtoMorenoetal.(2008),therearedifferentformsofclassifyingWR. Thefirstoneisintoprostheticororthoticdevices.Prostheticrobotsarethose thatsubstitutelostlimbswhileorthoticrobotsoperateinparallelwiththesubject’slimbs.Asecond(anduseful)classificationisaccordingtotheapplication ofuse.Inthiscase,applicationsrangefromservicerobots,rehabilitation,and functionalcompensationdevices(alsocalledmedicalexoskeletons),spaceapplicationstodevicesformilitaryuse.
BeyondthepotentialapplicationsofWRtoaugmentloadcarryingcapacitiesortoenabletheusertoworkinharshenvironments,thisbookfocuseson therehabilitationandfunctionalcompensationwearabledevices.Rehabilitation andfunctionalcompensationarekeyinanagingpopulation,wheretheshortage ofcaregiversisareality.Whilerehabilitationdevicescanbeusedforimproving lostfunctionsinalargerangeofapplicationsanddisabilities,functionalcompensationdevicesareakeytoincreaseindependenceandperformanceindaily tasksofindividualswithachroniclesionorpermanentdysfunctions(Huoetal., 2016).
Rehabilitationandwearablerobotsdatefromtheearly1960s.Startingwith pioneeringworkatCaseInstituteofTechnology,afourdegree-of-freedom (DoF)externallypoweredexoskeletonwasproposedand,in1969,theRancho GoldenArmwaspresentedasasixDoFpoweredorthosis(Harwinetal., 1995).
Anotherinterestingapproachthatledtotheevolutionofrehabilitationrobots isusingindustrialrobotsincombinationwithinterfacedevicestoassistpatients.TheUSDepartmentofVeteransAffairsandStanfordUniversity(VA/SU) roboticsprogramproposedtheRoboticsAidProjectwiththegoalofdeveloping asystemforpeopleaffectedbyquadriplegia(VanderLoos, 1995).Therobot couldbevoice-controlledtoperformpreexistingprograms.Robotsforassisting individualsinActivitiesofDailyLiving(ADLs)weredevelopedbytheClinical RoboticsLaboratoryattheVASpinalCordInjuryCenter(SCIC).InEurope (Dallawayetal., 1995),theSpartacusProjectproposedtheuseofmanipulators toassistindividualswithspinalcordinjuries.Arobotarmwasalsoproposedto assisttetraplegicpatientsatUniversityofHeidelberg(Germany).TheHeidelbergManipulatorusedageneral-purposepneumaticendeffectorwasusedfor manipulationandpageturningforwhichcouldalsobeperformedbyaseparatelycontrolledvacuum“finger.”Foramoredetailedhistoricaldescriptionof rehabilitationrobotics,pleaserefertoRoconandPons(2011).
LimitationsonthedevelopmentofWRswerehistoricallyrelatedtolimitationsonpowersupply,sensor,andactuatortechnologies.Inpresentdays,some ofthoselimitationsremain,beingoneofthemainreasonsfornotfindingmany WRambulatorydevices.Assensorsevolvedtominiaturization,withtherelated advantagesintransducingphenomenathroughdifferentenergydomains,the sametrendisyetnotachievedinpowersupplytechnologiesandonthedevelopmentofactuatorsthataredesignedtoimposeapredefinedmechanicalstate ontheroboticstructure.
InmostWRapplications,controlstrategiesrequireforce-controlledactuators,whichishardlyachievedinmostactuatortechnologiesduetoimpedance, striction,andbandwidthlimitations(Pons, 2010).Traditionaltechnologies,such aspneumatic,hydraulic,andelectromagneticactuatorsarefoundinseveral exoskeletalrobots(Huoetal., 2016).Directdriveactuatorsareaninterestingmannertoachieveclosetoidealforcesources.However,suchsystemsare power-hungry,bulky,andheavyforexoskeletons,especiallythosedesignedto beambulatory(Duongetal., 2016).
Serieselasticactuators(SEAs)are,inthissense,anotherimportantapproach toachieveacontrollableimpedanceandbandwidthforwearabledevices.Electromagneticactuatorsareusuallysettodrivetheexoskeleton’sjointsandtoset acontrolledforcebycompressingtheelasticelement(BlayaandHerr, 2004). SEAsdesignalsoenablethepossibilityofestimatingtheoutputtorquethrough springdeflection,whichgreatlysimplifytheactuatorinstrumentation,since onlyanglesensorscanbeused(dosSantosetal., 2015).
Anotherinterestingapproachistousetheuser’smusclesasactuatorsby meansoffunctionalelectricalstimulation(FES)systemswithhighselectivity andperformance(SpringerandKhamis, 2017).Itisimportanttonotethatthe humanmusculoskeletalsystemispreservedaftersomelesionsthatleadtomotorimpairments,suchasstrokeandspinalcordinjury.Althoughsuchartificial activationofmusclescanfunctionasthesolesourceofactuation,applications ofintelligentFESsystemsinconjunctionwithotheractuators(suchasSEA) arealsoaninterestingalternativeforincreasinguser’sparticipation,avoidthe decreaseofmotorfunction,andatthesametime,providestablelocomotion (Seeletal., 2016).Otheremergingtechnologies,suchaselectroactivepolymers (Miriyevetal., 2017),electro-andmagneto-rheologicalfluids(Andradeetal., 2018),andshapememoryalloys(Bundhooetal., 2009)alsocouldbeconsideredpromisingforWRactuation,butarenotaseasilyfoundintheliteratureas thepreviouslymentionedtechnologies(Morenoetal., 2008).
Consideringsensortechnologyanditscloseinteractionwiththescopeof thisbook,thedevelopmentofcompactandenergeticallyefficientsensingdevicesenablebetterperformanceofwearableroboticsasmoreinformationfrom thedualphysicalandcognitivehuman-robotinteractionsaregathered,which improvesthedecision-makingprocessontherobotandthecompliancebetweenbothintrinsicallyinterfacedagents(humanandrobot).Sensorsallow betterfeedbackforhumanmotorcontrolandareakeystonetomonitorthe human-robot(andenvironment)interaction.Inthissense,solutionsformonitoringbioelectricalactivityfromtheuser’sneuromuscularsystem,kinematics (positions,angles,velocities,andaccelerations),andtheinteractionforcesand pressuresarecriticalinWRtechnologies.
Sensorsarefundamentaltoachievenaturalinterfacesincognitiveinteraction.Forabetterinteractionwiththeuser,informationshouldbegatheredfrom differentlevels,i.e.,centralnervoussystem(CNS),peripheralnervoussystem (PNS),andmovement.ConsideringtheCNS,informationfromtheuser’sbrain activityisobtainedforthedevelopmentofbrain-controlledexoskeletons(Pons, 2010).Inthisarea,sensorsaremainlyintegratedwithbrain-machineinterfaces andelectroencephalogram(EEG)isthemostusedsignal.Advancesinwireless, dryandimplantableEEGelectrodesarealsocurrentresearchanddevelopment areas(Xuetal., 2017).Neuralcontrolofwearabledevicescanbeachievedby interfacingrobotswiththehumanPNS.Surfaceandimplantedelectromyography(EMG)electrodesallowabroadrangeofapplications.Althoughintraneural/implantedinterfacesalreadyshowpromisingresults,thereareimportant
drawbacksthatshouldbeconsidered(whicharealsofoundonimplantedEEG electrodes),sincetheysufferfromhighnoiseandneeddirectcontactwiththe measuredregion;theirinstallationiscumbersomeandtime-consuming(Moreno etal., 2008).Suchsensorsalsoneedcomplexsignalprocessingtechniques,and themeasuredelectricalpotentialisnotdirectlyrelatedtotheappliedforceon thehuman-robotinteraction.
Thethirdlevelofinteractioninvolvestheacquisitionofkinematicandkineticinformation.Inthissense,encoders,hall-effectsensors,potentiometers, electrogoniometers,andmicroelectromechanicalsystems(MEMS)arealready widelyusedforhumanandrobotjointmeasurementsofparameterssuchas deformation,angle,torque,andforce.Sensorsformonitoringthephysicalinteractionbetweenhumanandrobotarealsofundamentalforthesafeoperationof theroboticdeviceincloseinteractionwithhumans.BeyondthekinematiccompatibilitybetweenexoskeletonandlimbanatomythatshouldbetakenintoaccountduringtheWR’sdesign,thecorrectapplicationandmonitoringofforces andpressuresinthephysicalinterfacearenecessaryforaneffectivemechanicalpowertransferbetweenrobotandtheuser.Abroadrangeoftechnologies, includingpiezoelectricorcapacitivesensors,straingauges,andpiezoresistive polymerscanmonitorforceandpressureinteractionbetweenahumanandrobot (Morenoetal., 2008).
Themonitoringcomfortandergonomicsplayanimportantroleinwearable robotsusabilityandusermotivationontherehabilitationtasks,wheresuitable monitoringofloadsonhumantissues(throughmonitoringforceandpressure) andmicroclimate(temperatureandhumidity)shouldbeperformedinorderto avoidpressureulcers,scars,andothertissuedamages.Sensorsdesignedtoprovidedirectmeasurementsofsuchparametersareessentialforachievingthe usabilityandsafetyrequirementsinrehabilitationandfunctionalcompensation systems.Humidityinformationcanbeacquiredwithdifferentsensortechnologies:capacitive,resistive,andthermalconductivitysensorsarefound.Temperaturesensingisalsomatureforindustrialapplications,whereabroadrangeof sensitiveandprecisedevicesbasedonthermocouplesandsemiconductorand resistivesensorsarefound.Nevertheless,suchsensorssystemsarenotusually foundincurrentWR(Huoetal., 2016).
Thetrendofsoftrobotsasthefutureofwearabletechnologybroughtimportantconstraintsandnewchallengesforthedevelopmentofflexibletechnologies forsensors,astheconventionalrigidstructuresforsensorsarenotsuitablefor suchnovelflexibleandsoftrobots.Inthissense,newmaterialsforflexiblesensorsarealsothefocusofresearchinseveralresearchgroups.Softrobotsare anemergingfieldthataimsatdevelopingrobotsthataremoreadaptableto theirsurroundings.Suchdevicesareexpectedtoperformdifferentandmoreautonomoustasksandtomimicthemotionandfunctionsofbiologicalsystems (Editorial, 2018).Softandsmartmaterials(suchaselastomersandtextiles) andfabricationtechnologies(especially3Dprinting(Wallinetal., 2018)and
origamifoldingtechniques(RusandTolley, 2018))areimportantinthedesign ofsoftrobots.
Thetechnologicalchallengesinvolvedinthedevelopmentandintegrationof softactuators,sensors,control,andpowersystemstodesignartificialandintelligentsoftrobotsthatcanworksafelyincloseinteractionwithhumansare importantgoalsofthisfield.Applicationsofsoftrobotsincludeassistiveand wearabledevicesthatcanworkinspaceorwithinhumanorgans.Itisimportant tonotethatsoftrobotswillnotreplacetraditionalrigid(medical)exoskeletons, consideringthatarigidstructureandpowerfulactuatorsareneededforagreat numberofapplications,suchasprovidingtheabilitytomovebodypartsfor patientsthatareparalyzedbelowthewaist.Instead,softrobotswilloffercomplementarycapabilitiesforapplicationsthatrequiresoftsystems(Walsh, 2018). Thesoftmaterialpropertiesprovideinterestingadvantagesforassistiverobots, especiallybyminimizingrestrictionstothewearerandeliminatingtheneed foraligningrobotandbiologicaljoints.Additionally,softtechnologiescanbe designedtonotinterferewithnaturalmovementsoftheuser.Suchlowinertia features,whichareusuallyhardtoachieveinconventionalorrigidbiomechatronicdevices.Fig. 1.6 summarizesthewearablerobotstechnologiesdiscussed inthissectionandshowsthemonitoredparametersinsuchdevices.
Thisbookaddressesapromisingandyetmaturetechnology,opticalfiber sensors,whichrepresentanevolutiononthedesignandintegrationofsoftsensorsinflexiblestructures,oraspartofthefabricationofsmartmaterials.Such technologycanbeusedfordevelopingdistributedorquasidistributedsensor systemsaswillbefurtherexploredinthenextchapters.Suchsystemscanprovidedifferentmeasurementsandparameterstobeusedinrehabilitationand functionalcompensationwearableandsoftroboticsystems.
1.3Wearablesensorsandmonitoringdevices
Thepatientmonitoringparametersincludethebiomechanicalones,subdivided intokinematicsandkinetics.Suchparametersprovideimportantinformationregardingthehumanphysicalconditionandaredirectlyrelatedtotheefficiency onthedailyactivityperformanceaswellasthelocomotion(Kirtley, 2006). Thebiomechanicsofhumanmovementisthestudyofthemechanicalcharacteristicsandaspectsofhumanmovement(Knudson, 2018).Asanimportant featureinhumanlocomotion,themovementanalysisincludesgaitanalysis, whichcomprisesthesystematicstudyofhumanwalking,performedbycollectingkinematicandkineticdata(Wongetal., 2015).Inthekinematicsassessment, thedescriptionofbodymotionisperformedwithoutconsideringthecausesof motion(Wongetal., 2015).Thekinematicparametersincludejointangles,centerofmass(CoM)displacementvelocity,andspatiotemporalgaitparameters suchascadence,stride,andsteplength,amongothersasdiscussedinKirtley (2006).Thespatiotemporalgaitparametersdescribethefootplacement,gait eventstiming,andvelocityvariables(Kirtley, 2006).Theassessmentofsuch






FIGURE1.6 Schematicrepresentationofthewearablerobots(exoskeleton,inthiscase)andthe parametersfortheirinstrumentation.
parametersformsthebasisofthegaitkinematicanalysisasitcomplementsthe angularanddisplacementdataingait.Inthemovement’skineticsassessment, theforcesandtorquesthatinitiatethemovementareanalyzed.Thus,italsoconsiderstheforcesgeneratedinternallyinthebodythatresultinhumanmovement (Wongetal., 2015).Ingeneral,kineticsparametersincludegroundreaction forces(GRF),plantarpressuredistribution,andjointmomentum(Muro-de-la Herranetal., 2014).
Thekinematicparameterassessment,especiallyhumanjointangles,are appliedonrehabilitation,trainingathletesandthediagnosisofneurologicaldisordersthataffectsthemovement(El-GoharyandMcNames, 2012).Moreover, thekinematicdatameasuredcanbeemployedonneuralprosthesescontroland functionalelectricalstimulation(FES)(TongandGranat, 1999).Camera-based motioncapturesystemsprovidereliablemeasurementsofhumankinematics. However,itisacostlyandtime-consumingtechnique.Asitislimitedtolaboratoryorclinicalenvironment,itcannotbeappliedonthecontinuousmonitoring ofhumanmovement,especiallyinremote(orin-home)(El-GoharyandMcNames, 2012).Therefore,forgaitanalysis,themotioncaptureandkinematic measurementarelimitedtofewgaitcycles.Withtheaimofaddressingthese