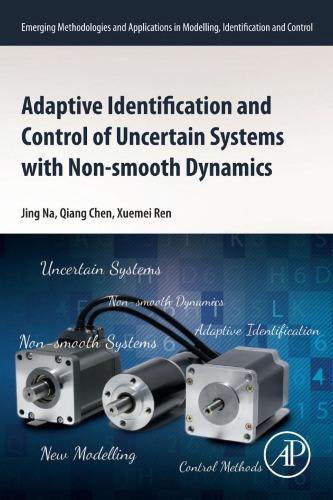
ChronologicalHistoryofFeedbackControl
Automotive stability augmentation systems
Driverless cars
Farm tractor auto-steering via GPS Drones
GPS
Unmanned aircraft
High precision disk drive control
Computer-aided control design
Internal model control
Feedback control of automotive engines
Aircraft auto-landing
Microprocessor
Apollo digital autopilot
Aircraft stability augmentation
LQG design
Inertial navigation
Maximum principle
Dynamic programming
Numerical optimization
Optimal filtering
Sampled data systems Root locus
Nyquist stability
Frequency-response tools
Feedback amplifier
Autopilot
Stability analysis of governor
Routh stability
Fly-ball governor
Incubator 1600s1700s1800s191019201930194019501960197019801990 20102020 2000
This page intentionally left blank
EighthEdition
GlobalEdition
Director,PortfolioManagement:Engineering,Computer Science&GlobalEditions: JulianPartridge
Specialist,HigherEdPortfolioManagement: NorrinDias
PortfolioManagementAssistant: EmilyEgan
AcquisitionsEditor,GlobalEdition: MoasenlaJamir
ManagingContentProducer: ScottDisanno
ContentProducer: CaroleSnyder
SeniorProjectEditor,GlobalEdition: K.K.Neelakantan
WebDeveloper: SteveWright
Manager,MediaProduction,GlobalEdition: VikramKumar
RightsandPermissionsManager: BenFerrini
ManufacturingBuyer,HigherEd,LakeSide CommunicationsInc(LSC): MauraZaldivar-Garcia
SeniorManufacturingController,Global Edition: KayHolman
InventoryManager: AnnLam
ProductMarketingManager: YvonneVannatta
FieldMarketingManager: DemetriusHall
MarketingAssistant: JonBryant
CoverDesigner: LuminaDatamatics,Inc.
CoverArt(orCoverPhoto): DimaZel/Shutterstock
Full-ServiceProjectManager: GeorgeJacobandPhilip Alexander,IntegraSoftwareServicesPvt.Ltd.
Creditsandacknowledgmentsborrowedfromothersourcesandreproduced,withpermission,inthistextbook appearonappropriatepagewithintext.
Matlab andSimulink areregisteredtrademarksofTheMathWorks,Inc.,3AppleHillDrive,Natick,MA.
PearsonEducationLimited KAOTwo KAOPark Harlow CM179NA UnitedKingdom
andAssociatedCompaniesthroughouttheworld
VisitusontheWorldWideWebat: www.pearsonglobaleditions.com
c PearsonEducationLimited,2020
TherightsofGeneF.Franklin,J.DavidPowell,andAbbasEmami-Naeinitobeidentifiedastheauthorsofthisworkhave beenassertedbytheminaccordancewiththeCopyright,DesignsandPatentsAct1988.
AuthorizedadaptationfromtheUnitedStatesedition,entitled FeedbackControlofDynamicSystems, 8th Edition,ISBN 978-0-13-468571-7byGeneF.Franklin,J.DavidPowell,andAbbasEmami-Naeini,publishedbyPearsonEducation c 2019.
Allrightsreserved.Nopartofthispublicationmaybereproduced,storedinaretrievalsystem,ortransmittedinanyform orbyanymeans,electronic,mechanical,photocopying,recordingorotherwise,withouteitherthepriorwrittenpermission ofthepublisheroralicensepermittingrestrictedcopyingintheUnitedKingdomissuedbytheCopyrightLicensingAgency Ltd,SaffronHouse,6-10KirbyStreet,LondonEC1N8TS.
Alltrademarksusedhereinarethepropertyoftheirrespectiveowners.Theuseofanytrademarkinthistextdoesnot vestintheauthororpublisheranytrademarkownershiprightsinsuchtrademarks,nordoestheuseofsuchtrademarks implyanyaffiliationwithorendorsementofthisbookbysuchowners.Forinformationregardingpermissions,request forms,andtheappropriatecontactswithinthePearsonEducationGlobalRightsandPermissionsdepartment,pleasevisit www.pearsoned.com/permissions.
ThiseBookisastandaloneproductandmayormaynotincludeallassetsthatwerepartoftheprintversion.Italsodoes notprovideaccesstootherPearsondigitalproductslikeMyLabandMastering.Thepublisherreservestherighttoremove anymaterialinthiseBookatanytime.
BritishLibraryCataloguing-in-PublicationData AcataloguerecordforthisbookisavailablefromtheBritishLibrary
ISBN10: 1-292-27452-2
ISBN13: 978-1-292-27452-2
eBookISBN13: 978-1-292-27454-6
TypesetbyIntegra
ToValerie,Daisy,Annika,Davenport,Malahat,Sheila,Nima,andto thememoryofGene
This page intentionally left blank
1
Preface 15
AnOverviewandBrief HistoryofFeedbackControl23
APerspectiveonFeedbackControl23 ChapterOverview24
1.1ASimpleFeedbackSystem25
1.2AFirstAnalysisofFeedback28
1.3FeedbackSystemFundamentals32
1.4ABriefHistory33
1.5AnOverviewoftheBook40 Summary41 ReviewQuestions42 Problems42
2 DynamicModels46
APerspectiveonDynamicModels46 ChapterOverview47
2.1DynamicsofMechanicalSystems47
2.1.1TranslationalMotion47
2.1.2RotationalMotion54
2.1.3CombinedRotationandTranslation65
2.1.4ComplexMechanicalSystems(W)**68
2.1.5DistributedParameterSystems68
2.1.6Summary:DevelopingEquationsofMotion forRigidBodies70
2.2ModelsofElectricCircuits71
2.3ModelsofElectromechanicalSystems76
2.3.1Loudspeakers76
2.3.2Motors78
2.3.3Gears82
2.4HeatandFluid-FlowModels83
2.4.1HeatFlow84
2.4.2IncompressibleFluidFlow88
2.5HistoricalPerspective95 Summary98 ReviewQuestions98 Problems99
**Sectionswith(W)indicatesthatadditionalmaterialislocatedonthewebat www.pearsonglobaleditions.com.
3 DynamicResponse111
APerspectiveonSystemResponse111 ChapterOverview112
3.1ReviewofLaplaceTransforms112
3.1.1ResponsebyConvolution113
3.1.2TransferFunctionsandFrequencyResponse118
3.1.3The L LaplaceTransform128
3.1.4PropertiesofLaplaceTransforms130
3.1.5InverseLaplaceTransformbyPartial-Fraction Expansion132
3.1.6TheFinalValueTheorem134
3.1.7UsingLaplaceTransformstoSolveDifferential Equations136
3.1.8PolesandZeros138
3.1.9LinearSystemAnalysisUsingMatlab139
3.2SystemModelingDiagrams145
3.2.1TheBlockDiagram145
3.2.2Block-DiagramReductionUsingMatlab149
3.2.3Mason’sRuleandtheSignalFlowGraph(W)150
3.3EffectofPoleLocations150
3.4Time-DomainSpecifications159
3.4.1RiseTime159
3.4.2OvershootandPeakTime160
3.4.3SettlingTime161
3.5EffectsofZerosandAdditionalPoles164
3.6Stability174
3.6.1BoundedInput–BoundedOutputStability174
3.6.2StabilityofLTISystems176
3.6.3Routh’sStabilityCriterion177
3.7ObtainingModelsfromExperimentalData: SystemIdentification(W)184
3.8AmplitudeandTimeScaling(W)184
3.9HistoricalPerspective184 Summary185 ReviewQuestions187 Problems187
4 AFirstAnalysisofFeedback208
APerspectiveontheAnalysisofFeedback208 ChapterOverview209
4.1TheBasicEquationsofControl210
4.1.1Stability211
4.1.2Tracking212
4.1.3Regulation213
4.1.4Sensitivity214
5
4.2ControlofSteady-StateErrortoPolynomialInputs: SystemType216
4.2.1SystemTypeforTracking217
4.2.2SystemTypeforRegulationandDisturbance Rejection222
4.3TheThree-TermController:PIDControl224
4.3.1ProportionalControl(P)224
4.3.2IntegralControl(I)226
4.3.3DerivativeControl(D)229
4.3.4ProportionalPlusIntegralControl(PI)229
4.3.5PIDControl233
4.3.6Ziegler–NicholsTuningofthePID Controller238
4.4FeedforwardControlbyPlantModelInversion244
4.5IntroductiontoDigitalControl(W)246
4.6SensitivityofTimeResponsetoParameter Change(W)247
4.7HistoricalPerspective247 Summary249 ReviewQuestions250 Problems251
TheRoot-LocusDesign Method270
APerspectiveontheRoot-LocusDesignMethod270 ChapterOverview271
5.1RootLocusofaBasicFeedbackSystem271
5.2GuidelinesforDeterminingaRootLocus276
5.2.1RulesforDeterminingaPositive(180◦ ) RootLocus278
5.2.2SummaryoftheRulesforDetermininga RootLocus284
5.2.3SelectingtheParameterValue285
5.3SelectedIllustrativeRootLoci288
5.4DesignUsingDynamicCompensation301
5.4.1DesignUsingLeadCompensation302
5.4.2DesignUsingLagCompensation307
5.4.3DesignUsingNotchCompensation310
5.4.4AnalogandDigitalImplementations(W)312
5.5DesignExamplesUsingtheRootLocus312
5.6ExtensionsoftheRoot-LocusMethod323
5.6.1RulesforPlottingaNegative(0◦ ) RootLocus323
5.6.2SuccessiveLoopClosure326
5.6.3TimeDelay(W)331
5.7HistoricalPerspective331
6
Summary333 ReviewQuestions335 Problems335
TheFrequency-Response DesignMethod353
APerspectiveontheFrequency-ResponseDesignMethod353 ChapterOverview354
6.1FrequencyResponse354
6.1.1BodePlotTechniques362
6.1.2Steady-StateErrors374
6.2NeutralStability376
6.3TheNyquistStabilityCriterion379
6.3.1TheArgumentPrinciple379
6.3.2ApplicationofTheArgumentPrinciple toControlDesign380
6.4StabilityMargins393
6.5Bode’sGain–PhaseRelationship402
6.6Closed-LoopFrequencyResponse407
6.7Compensation408
6.7.1PDCompensation409
6.7.2LeadCompensation(W)410
6.7.3PICompensation420
6.7.4LagCompensation420
6.7.5PIDCompensation426
6.7.6DesignConsiderations433
6.7.7SpecificationsinTermsoftheSensitivity Function435
6.7.8LimitationsonDesigninTermsoftheSensitivity Function440
6.8TimeDelay443
6.8.1TimeDelayviatheNyquistDiagram(W)445
6.9AlternativePresentationofData445
6.9.1NicholsChart445
6.9.2TheInverseNyquistDiagram(W)450
6.10HistoricalPerspective450 Summary451 ReviewQuestions453 Problems454
7 State-SpaceDesign479
APerspectiveonState-SpaceDesign479 ChapterOverview480
7.1AdvantagesofState-Space480
7.2SystemDescriptioninState-Space482
7.3BlockDiagramsandState-Space488
7.4AnalysisoftheStateEquations491
7.4.1BlockDiagramsandCanonicalForms491
7.4.2DynamicResponsefromtheState Equations503
7.5Control-LawDesignforFull-StateFeedback508
7.5.1FindingtheControlLaw509
7.5.2IntroducingtheReferenceInputwithFull-State Feedback518
7.6SelectionofPoleLocationsforGoodDesign522
7.6.1DominantSecond-OrderPoles522
7.6.2SymmetricRootLocus(SRL)524
7.6.3CommentsontheMethods533
7.7EstimatorDesign534
7.7.1Full-OrderEstimators534
7.7.2Reduced-OrderEstimators540
7.7.3EstimatorPoleSelection544
7.8CompensatorDesign:CombinedControl LawandEstimator(W)547
7.9IntroductionoftheReferenceInput withtheEstimator(W)559
7.9.1GeneralStructurefortheReferenceInput561
7.9.2SelectingtheGain570
7.10IntegralControlandRobustTracking571
7.10.1IntegralControl571
7.10.2RobustTrackingControl:TheError-Space Approach573
7.10.3Model-FollowingDesign585
7.10.4TheExtendedEstimator589
7.11LoopTransferRecovery592
7.12DirectDesignwithRationalTransfer Functions598
7.13DesignforSystemswithPureTimeDelay602
7.14SolutionofStateEquations(W)605
7.15HistoricalPerspective607 Summary608 ReviewQuestions611 Problems612
8 DigitalControl636 APerspectiveonDigitalControl636 ChapterOverview636
8.1Digitization637
8.2DynamicAnalysisofDiscreteSystems640
8.2.1 z-Transform640
8.2.2 z-TransformInversion641
8.2.3RelationshipBetween s and z 643
8.2.4FinalValueTheorem645
8.3DesignUsingDiscreteEquivalents647
8.3.1Tustin’sMethod647
8.3.2Zero-OrderHold(ZOH)Method651
8.3.3MatchedPole–Zero(MPZ)Method653
8.3.4ModifiedMatchedPole–Zero (MMPZ)Method657
8.3.5ComparisonofDigitalApproximation Methods658
8.3.6ApplicabilityLimitsoftheDiscreteEquivalent DesignMethod659
8.4HardwareCharacteristics659
8.4.1Analog-to-Digital(A/D)Converters660
8.4.2Digital-to-AnalogConverters660
8.4.3Anti-AliasPrefilters661
8.4.4TheComputer662
8.5Sample-RateSelection663
8.5.1TrackingEffectiveness664
8.5.2DisturbanceRejection665
8.5.3EffectofAnti-AliasPrefilter665
8.5.4AsynchronousSampling666
8.6DiscreteDesign666
8.6.1AnalysisTools667
8.6.2FeedbackProperties668
8.6.3DiscreteDesignExample670
8.6.4DiscreteAnalysisofDesigns672
8.7DiscreteState-SpaceDesignMethods(W)674
8.8HistoricalPerspective674 Summary675
ReviewQuestions677 Problems677
9
NonlinearSystems683
APerspectiveonNonlinearSystems683 ChapterOverview684
9.1IntroductionandMotivation:WhyStudy NonlinearSystems?685
9.2AnalysisbyLinearization687
9.2.1LinearizationbySmall-SignalAnalysis687
9.2.2LinearizationbyNonlinearFeedback692
9.2.3LinearizationbyInverseNonlinearity693
9.3EquivalentGainAnalysisUsingtheRoot Locus694
9.3.1IntegratorAntiwindup701
AppendixA
9.4EquivalentGainAnalysisUsingFrequency Response:DescribingFunctions706
9.4.1StabilityAnalysisUsingDescribing Functions712
9.5AnalysisandDesignBasedonStability716
9.5.1ThePhasePlane717
9.5.2LyapunovStabilityAnalysis723
9.5.3TheCircleCriterion731
9.6HistoricalPerspective737 Summary738
ReviewQuestions739 Problems739
ControlSystemDesign:PrinciplesandCase Studies751
APerspectiveonDesignPrinciples751 ChapterOverview751
10.1AnOutlineofControlSystems Design753
10.2DesignofaSatellite’sAttitude Control759
10.3LateralandLongitudinalControl ofaBoeing747777
10.3.1YawDamper782
10.3.2Altitude-HoldAutopilot789
10.4ControloftheFuel–AirRatio inanAutomotiveEngine795
10.5ControlofaQuadrotorDrone803
10.6ControlofRTPSystemsinSemiconductorWafer Manufacturing819
10.7Chemotaxis,orHow E.Coli SwimsAway fromTrouble833
10.8HistoricalPerspective843 Summary845
ReviewQuestions847 Problems847
LaplaceTransforms 865
A.1The L LaplaceTransform865
A.1.1PropertiesofLaplaceTransforms866
A.1.2InverseLaplaceTransformbyPartial-Fraction Expansion874
A.1.3TheInitialValueTheorem877
A.1.4FinalValueTheorem878
AppendixB SolutionstotheReviewQuestions 880
AppendixC MatlabCommands 897
Bibliography 903
Index 912
ListofAppendicesonthewebatwww. pearsonglobaleditions.com
AppendixWA:AReviewofComplexVariables
AppendixWB:SummaryofMatrixTheory
AppendixWC:ControllabilityandObservability
AppendixWD:Ackermann’sFormulaforPolePlacement
AppendixW2.1.4:ComplexMechanicalSystems
AppendixW3.2.3:Mason’sRuleandtheSignal-FlowGraph
AppendixW.3.6.3.1:RouthSpecialCases
AppendixW3.7:SystemIdentification
AppendixW3.8:AmplitudeandTimeScaling
AppendixW4.1.4.1:TheFilteredCase
AppendixW4.2.2.1:Truxal’sFormulafortheError Constants
AppendixW4.5:IntroductiontoDigitalControl
AppendixW4.6:SensitivityofTimeResponsetoParameter Change
AppendixW5.4.4:AnalogandDigitalImplementations
AppendixW5.6.3:RootLocuswithTimeDelay
AppendixW6.7.2:DigitalImplementationof Example6.15
AppendixW6.8.1:TimeDelayviatheNyquistDiagram
AppendixW6.9.2:TheInverseNyquistDiagram
AppendixW7.8:DigitalImplementationofExample7.31
AppendixW7.9:DigitalImplementationofExample7.33
AppendixW7.14:SolutionofStateEquations
AppendixW8.7:DiscreteState-SpaceDesignMethods
Preface
InthisEighthEditionweagainpresentatextinsupportofafirstcourse incontrolandhaveretainedthebestfeaturesofourearliereditions.For thisedition,wehaverespondedtoasurveyofusersbyaddingsome newmaterial(forexample,dronedynamicsandcontrol)anddeleted otherlittle-usedmaterialfromthebook.Wehavealsoupdatedthetext throughoutsothatitusestheimprovedfeaturesofMATLAB .Drones havebeendiscussedextensivelyinthecontrolsliteratureaswellasthe commonpress.Theyarebeingusedinmining,construction,aerialphotography,searchandrescue,movieindustry,packagedelivery,mapping, surveying,farming,animalresearch,hurricanehunting,anddefense. Sincefeedbackcontrolisanecessarycomponentofallthedrones,we developtheequationsofmotioninChapter2,andfollowthatwithcontroldesignexamplesinthechapters5,6,7,and10.Theyhavegreat potentialformanytasksandcouldspeedupandlessenthecostofthese activities.Thefigurebelowsymbolizesthewidespreadinterestinthis excitingnewfield.
Source:EdwardKoren/TheNewYorker
Thebasicstructureofthebookisunchangedandwecontinueto combineanalysiswithdesignusingthethreeapproachesoftheroot locus,frequencyresponse,andstate-variableequations.Thetextcontinuestoincludemanycarefullyworkedoutexamplestoillustratethe material.Asbefore,weprovideasetofreviewquestionsattheendof eachchapterwithanswersinthebackofthebooktoassistthestudents inverifyingthattheyhavelearnedthematerial.
Inthethreecentralchaptersondesignmethodswecontinueto expectthestudentstolearnhowtoperformtheverybasiccalculations byhandandmakearoughsketchofarootlocusorBodeplotasa sanitycheckonthecomputerresultsandasanaidtodesign.However, weintroducetheuseofMatlabearlyoninrecognitionoftheuniversaluseofsoftwaretoolsincontrolanalysisanddesign.Asbefore,we havepreparedacollectionofalltheMatlabfiles(both“m”filesand SIMULINK “slx”files)usedtoproducethefiguresinthebook.These areavailablealongwiththeadvancedmaterialdescribedaboveatour websiteat www.pearsonglobaleditions.com.
NewtothisEdition
WefeelthatthisEighthEditionpresentsthematerialwithgoodpedagogicalsupport,providesstrongmotivationforthestudyofcontrol, andrepresentsasolidfoundationformeetingtheeducationalchallenges.Weintroducethestudyoffeedbackcontrol,bothasaspecialty ofitselfandassupportformanyotherfields.
Amoredetailedlistofthechangesis:
• DeletedthediskdriveandtapedriveexamplesfromChapters2,7, and10
• Addeddroneexamplesand/orproblemsinChapters2,5,6,7, and10
• AddedathermalsystemcontrolexampletoChapters2and4
• Addedasectiononanti-windupforintegralcontrolinChapter9
• AddedCramer’sRuletochapter2andAppendixWB
• UpdatedMatlabcommandsthroughoutthebookandin AppendixC
• UpdatedthesectiononPIDtuninginchapter4
• Updatedtheenginecontrolandchemotaxiscasestudiesin Chapter10
• Over60oftheproblemsinthiseditionareeitherneworrevised fromthe7thedition
AddressingtheEducationalChallenges
Someoftheeducationalchallengesfacingstudentsoffeedbackcontrolarelong-standing;othershaveemergedinrecentyears.Someofthe challengesremainforstudentsacrosstheirentireengineeringeducation; othersareuniquetothisrelativelysophisticatedcourse.Whetherthey
areoldornew,generalorparticular,theeducationalchallengesweperceivedwerecriticaltotheevolutionofthistext.Here,wewillstate severaleducationalchallengesanddescribeourapproachestoeachof them.
• CHALLENGE Studentsmustmasterdesignaswellasanalysis techniques
Designiscentraltoallofengineeringandespeciallysotocontrolsystems.Studentsfindthatdesignissues,withtheircorresponding opportunitiestotacklepracticalapplications,areparticularlymotivating.Butstudentsalsofinddesignproblemsdifficultbecausedesign problemstatementsareusuallypoorlyposedandlackuniquesolutions. Becauseofbothitsinherentimportanceanditsmotivationaleffecton students,designisemphasizedthroughoutthistextsoconfidencein solvingdesignproblemsisdevelopedfromthestart.
TheemphasisondesignbeginsinChapter4followingthedevelopmentofmodelinganddynamicresponse.Thebasicideaoffeedbackis introducedfirst,showingitsinfluenceondisturbancerejection,tracking accuracy,androbustnesstoparameterchanges.Thedesignorientationcontinueswithuniformtreatmentsoftherootlocus,frequency response,andstatevariablefeedbacktechniques.Allthetreatmentsare aimedatprovidingtheknowledgenecessarytofindagoodfeedback controldesignwithnomorecomplexmathematicaldevelopmentthan isessentialtoclearunderstanding.
Throughoutthetext,examplesareusedtocompareandcontrast thedesigntechniquesaffordedbythedifferentdesignmethodsand, inthecapstonecasestudiesofChapter10,complexreal-worlddesign problemsareattackedusingallthemethodsinaunifiedway.
• CHALLENGE Newideascontinuetobeintroducedintocontrol.
Controlisanactivefieldofresearchandhencethereisasteady influxofnewconcepts,ideas,andtechniques.Intime,someofthese elementsdeveloptothepointwheretheyjointhelistofthingsevery controlengineermustknow.Thistextisdevotedtosupportingstudents equallyintheirneedtograspbothtraditionalandmoremoderntopics.
Ineachofoureditions,wehavetriedtogiveequalimportanceto rootlocus,frequencyresponse,andstate-variablemethodsfordesign. Inthisedition,wecontinuetoemphasizesolidmasteryoftheunderlyingtechniques,coupledwithcomputer-basedmethodsfordetailed calculation.Wealsoprovideanearlyintroductiontodatasamplingand discretecontrollersinrecognitionofthemajorroleplayedbydigital controllersinourfield.Whilethismaterialcanbeskippedtosavetime withoutharmtotheflowofthetext,wefeelthatitisveryimportantfor studentstounderstandthatcomputercontroliswidelyusedandthat themostbasictechniquesofcomputercontrolareeasilymastered.
• CHALLENGE Studentsneedtomanageagreatdealofinformation.
Thevastarrayofsystemstowhichfeedbackcontrolisappliedand thegrowingvarietyoftechniquesavailableforthesolutionofcontrol problemsmeansthattoday’sstudentoffeedbackcontrolmustlearn manynewideas.Howdostudentskeeptheirperspectiveastheyplow throughlengthyandcomplextextualpassages?Howdotheyidentify highlightsanddrawappropriateconclusions?Howdotheyreviewfor exams?HelpingstudentswiththesetaskswasacriterionfortheFourth, Fifth,Sixth,andSeventhEditionsandcontinuestobeaddressedinthis EighthEdition.Weoutlinethesefeaturesbelow.
FEATURE
1. Chapteropeners offerperspectiveandoverview.Theyplacethespecificchaptertopicinthecontextofthedisciplineasawhole,and theybrieflyoverviewthechaptersections.
2. Marginnotes helpstudentsscanforchapterhighlights.Theypoint toimportantdefinitions,equations,andconcepts.
3. Shadedhighlights identifykeyconceptswithintherunningtext. Theyalsofunctiontosummarizeimportantdesignprocedures.
4. Bulletedchaptersummaries helpwithstudentreviewandprioritization.Thesesummariesbrieflyreiteratethekeyconceptsand conclusionsofthechapter.
5. Synopsisofdesignaids.Relationshipsusedindesignandthroughoutthebookarecollectedinsidethebackcoverforeasyreference.
6. Thecolorblue isused(1)tohighlightusefulpedagogicalfeatures, (2)tohighlightcomponentsunderparticularscrutinywithinblock diagrams,(3)todistinguishcurvesongraphs,and(4)tolendamore realisticlooktofiguresofphysicalsystems.
7. Reviewquestions attheendofeachchapterwithsolutionsinthe backtoguidethestudentinself-study
8. Historicalperspectives attheendofeachchapterprovidesome backgroundandcoloronhoworwhythematerialinthatparticular chapterevolved.
• CHALLENGE Studentsoffeedbackcontrolcomefromawide rangeofdisciplines.
Feedbackcontrolisaninterdisciplinaryfieldinthatcontrolis appliedtosystemsineveryconceivableareaofengineering.Consequently,someschoolshaveseparateintroductorycoursesforcontrol withinthestandarddisciplinesandsome,suchasStanford,haveasinglesetofcoursestakenbystudentsfrommanydisciplines.However,to restricttheexamplestoonefieldistomissmuchoftherangeandpower offeedbackbuttocoverthewholerangeofapplicationsisoverwhelming.Inthisbook,wedeveloptheinterdisciplinarynatureofthefieldand
providereviewmaterialforseveralofthemostcommontechnologiesso thatstudentsfrommanydisciplineswillbecomfortablewiththepresentation.ForElectricalEngineeringstudentswhotypicallyhaveagood backgroundintransformanalysis,weincludeinChapter2anintroductiontowritingequationsofmotionformechanicalmechanisms.For mechanicalengineers,weincludeinChapter3areviewoftheLaplace transformanddynamicresponseasneededincontrol.Inaddition,we introduceothertechnologiesbrieflyand,fromtimetotime,wepresent theequationsofmotionofaphysicalsystemwithoutderivationbut withenoughphysicaldescriptiontobeunderstoodfromaresponse pointofview.Examplesofsomeofthephysicalsystemsrepresented inthetextincludeaquadrotordrone,asatellitetrackingsystem,the fuel–airratioinanautomobileengine,andanairplaneautomaticpilot system.
OutlineoftheBook
Thecontentsoftheprintedbookareorganizedintotenchaptersand threeappendices.Optionalsectionsofadvancedorenrichmentmaterial markedwithatriangle( )areincludedattheendofsomechapters.Examplesandproblemsbasedonthismaterialarealsomarked withatriangle( ).Therearealsofourfullappendicesonthewebsiteplusnumerousappendicesthatsupplementthematerialinmost ofthechapters.TheappendicesintheprintedbookincludeLaplace transformtables,answerstotheend-of-chapterreviewquestions,and alistofMatlabcommands.Theappendicesonthewebsiteincludea reviewofcomplexvariables,areviewofmatrixtheory,someimportant resultsrelatedtostate-spacedesign,andoptionalmaterialsupporting orextendingseveralofthechapters.
InChapter1,theessentialideasoffeedbackandsomeofthekey designissuesareintroduced.Thischapteralsocontainsabriefhistory ofcontrol,fromtheancientbeginningsofprocesscontroltoflightcontrolandelectronicfeedbackamplifiers.Itishopedthatthisbriefhistory willgiveacontextforthefield,introducesomeofthekeypeoplewho contributedtoitsdevelopment,andprovidemotivationtothestudent forthestudiestocome.
Chapter2isashortpresentationofdynamicmodelingandincludes mechanical,electrical,electromechanical,fluid,andthermodynamic devices.Thismaterialcanbeomitted,usedasthebasisofreviewhomeworktosmoothouttheusualnonuniformpreparationofstudents,or coveredin-depthdependingontheneedsofthestudents.
Chapter3coversdynamicresponseasusedincontrol.Again,much ofthismaterialmayhavebeencoveredpreviously,especiallybyelectricalengineeringstudents.Formanystudents,thecorrelationbetween polelocationsandtransientresponseandtheeffectsofextrazerosand polesondynamicresponserepresentnewmaterial.Stabilityofdynamic
systemsisalsointroducedinthischapter.Thismaterialneedstobe coveredcarefully.
Chapter4presentsthebasicequationsandtransferfunctionsof feedbackalongwiththedefinitionsofthesensitivityfunction.With thesetools,open-loopandclosed-loopcontrolarecomparedwith respecttodisturbancerejection,trackingaccuracy,andsensitivity tomodelerrors.Classificationofsystemsaccordingtotheirability totrackpolynomialreferencesignalsortorejectpolynomialdisturbancesisdescribedwiththeconceptofsystemtype.Finally,the classicalproportional,integral,andderivative(PID)controlstructureisintroducedandtheinfluenceofthecontrollerparameterson asystem’scharacteristicequationisexploredalongwithPIDtuning methods.
FollowingtheoverviewoffeedbackinChapter4,thecoreof thebookpresentsthedesignmethodsbasedonrootlocus,frequency response,andstate-variablefeedbackinChapters5,6,and7,respectively.
Chapter8developsthetoolsneededtodesignfeedbackcontrol forimplementationinadigitalcomputer.However,foracomplete treatmentoffeedbackcontrolusingdigitalcomputers,thereaderis referredtothecompaniontext, DigitalControlofDynamicSystems, byFranklin,Powell,andWorkman;Ellis-KaglePress,1998.
InChapter9,thenonlinearmaterialincludestechniquesforthelinearizationofequationsofmotion,analysisofzeromemorynonlinearity asavariablegain,frequencyresponseasadescribingfunction,the phaseplane,Lyapunovstabilitytheory,andthecirclestabilitycriterion.
InChapter10,thethreeprimaryapproachesareintegratedinseveralcasestudies,andaframeworkfordesignisdescribedthatincludes atouchofthereal-worldcontextofpracticalcontroldesign.
CourseConfigurations
Thematerialinthistextcanbecoveredflexibly.Mostfirst-coursestudentsincontrolswillhavesomedynamicsandLaplacetransforms. Therefore,Chapter2andmostofChapter3wouldbeareviewfor thosestudents.Inaten-weekquarter,itispossibletoreviewChapter3,andcoverallofChapters1,4,5,and6.Mostoptionalsections shouldbeomitted.Inthesecondquarter,Chapters7and9canbecoveredcomfortablyincludingtheoptionalsections.Alternatively,some optionalsectionscouldbeomittedandselectedportionsofChapter8 included.AsemestercourseshouldcomfortablyaccommodateChapters1–7,includingthereviewmaterialsofChapters2and3,ifneeded. Iftimeremainsafterthiscorecoverage,someintroductionofdigital controlfromChapter8,selectednonlinearissuesfromChapter9,and someofthecasestudiesfromChapter10maybeadded.
Theentirebookcanalsobeusedforathree-quartersequence ofcoursesconsistingofmodelinganddynamicresponse(Chapters2
and3),classicalcontrol(Chapters4–6),andmoderncontrol(Chapters 7–10).
Twobasic10-weekcoursesareofferedatStanfordandaretaken byseniorsandfirst-yeargraduatestudentswhohavenothadacourse incontrol,mostlyinthedepartmentsofAeronauticsandAstronautics, MechanicalEngineering,andElectricalEngineering.Thefirstcourse reviewsChapters2and3andcoversChapters4–6.Themoreadvanced courseisintendedforgraduatestudentsandreviewsChapters4–6and coversChapters7–10.Thissequencecomplementsagraduatecourse inlinearsystemsandistheprerequisitetocoursesindigitalcontrol, nonlinearcontrol,optimalcontrol,flightcontrol,andsmartproduct design.Someofthesubsequentcoursesincludeextensivelaboratory experiments.Prerequisitesforthecoursesequenceincludedynamicsor circuitanalysisandLaplacetransforms.
PrerequisitestoThisFeedbackControlCourse
Thisbookisforafirstcourseattheseniorlevelforallengineering majors.ForthecoretopicsinChapters4–7,prerequisiteunderstandingofmodelinganddynamicresponseisnecessary.Manystudentswill comeintothecoursewithsufficientbackgroundinthoseconceptsfrom previouscoursesinphysics,circuits,anddynamicresponse.Forthose needingreview,Chapters2and3shouldfillinthegaps.
Anelementaryunderstandingofmatrixalgebraisnecessaryto understandthestate-spacematerial.Whileallstudentswillhavemuch ofthisinprerequisitemathcourses,areviewofthebasicrelationsis giveninonlineAppendixWBandabrieftreatmentofparticularmaterialneededincontrolisgivenatthestartofChapter7.Theemphasisis ontherelationsbetweenlineardynamicsystemsandlinearalgebra.
Supplements
Thewebsite www.pearsonglobaleditions.com includesthedot-manddotslxfilesusedtogeneratealltheMatlabfiguresinthebook,andthese maybecopiedanddistributedtothestudentsasdesired.Thewebsites alsocontainsomemoreadvancedmaterialandappendiceswhichare outlinedintheTableofContents.ASolutionsManualwithcomplete solutionstoallhomeworkproblemsisavailabletoinstructorsonly.
Acknowledgments
Finally,wewishtoacknowledgeourgreatdebttoallthosewhohave contributedtothedevelopmentoffeedbackcontrolintotheexciting fielditistodayandspecificallytotheconsiderablehelpandeducation wehavereceivedfromourstudentsandourcolleagues.Inparticular, wehavebenefitedinthiseffortbymanydiscussionswiththefollowing
whotaughtintroductorycontrolatStanford:A.E.Bryson,Jr.,R.H. Cannon,Jr.,D.B.DeBra,S.Rock,S.Boyd,C.Tomlin,P.Enge,A.Okamura,andC.Gerdes.OthercolleagueswhohavehelpedusincludeD. Fraser,N.C.Emami,B.Silver,M.Dorfman,K.Rudie,L.Pao,F.Khorrami,K.Lorell,M.Tischler,D.deRoover,R.Patrick,M.Berrios,J.K. Lee,J.L.Ebert,I.Kroo,K.Leung,andM.Schwager.Specialthanks gotothemanystudentswhohaveprovidedalmostallthesolutionsto theproblemsinthebook.
WeespeciallywanttoexpressourgreatappreciationforthecontributionstothebookbyGeneFranklin.Genewasamentor,teacher, advisor,andgoodfriendtousboth.Wehadmanymeetingsaswecollaboratedonearliereditionsofthebookoverthelast28yearsofhis life,andeverysingleoneofthosemeetingshasbeenfriendlyandenjoyableaswemeshedourviewsonhowtopresentthematerial.Welearned controlalongwithhumorfromGeneingradschoolclasses,andwe benefittedfromhismentoring:inonecaseasanewassistantprofessor,andintheotherasaPh.D.advisee.Collectively,wecollaborated onresearch,creatednewcoursesandlaboratories,andwrittentwotextbooksoveraperiodof40years.Genealwayshadasmilewithatwinkle inhiseye,andwasapleasuretoworkwith;hewasatruegentleman.
AcknowledgmentsfortheGlobalEdition
PearsonwouldliketothankandacknowledgeBenjaminChong, UniversityofLeeds,MehmetCanevi,IstanbulTechnicalUniversity, andTuranSöylemez,IstanbulTechnicalUniversity,forcontributing totheGlobalEdition,andMuratDogruel,MarmaraUniversity,Ivo Grondman,QuangHa,UniversityofTechnologySydney,Philippe Mullhaupt,EcolePolytechniqueFédéraledeLausanne,andRahul Sharma,TheUniversityofQueenslandforreviewingtheGlobalEdition.WewouldalsoliketothankBenjaminChong,LiLi,University ofTechnologySydney,RahulSharma,TuranSöylemez,andMark Vanpaemel,UniversiteitAntwerpen,fortheirvaluablefeedbackonthe GlobalEdition.